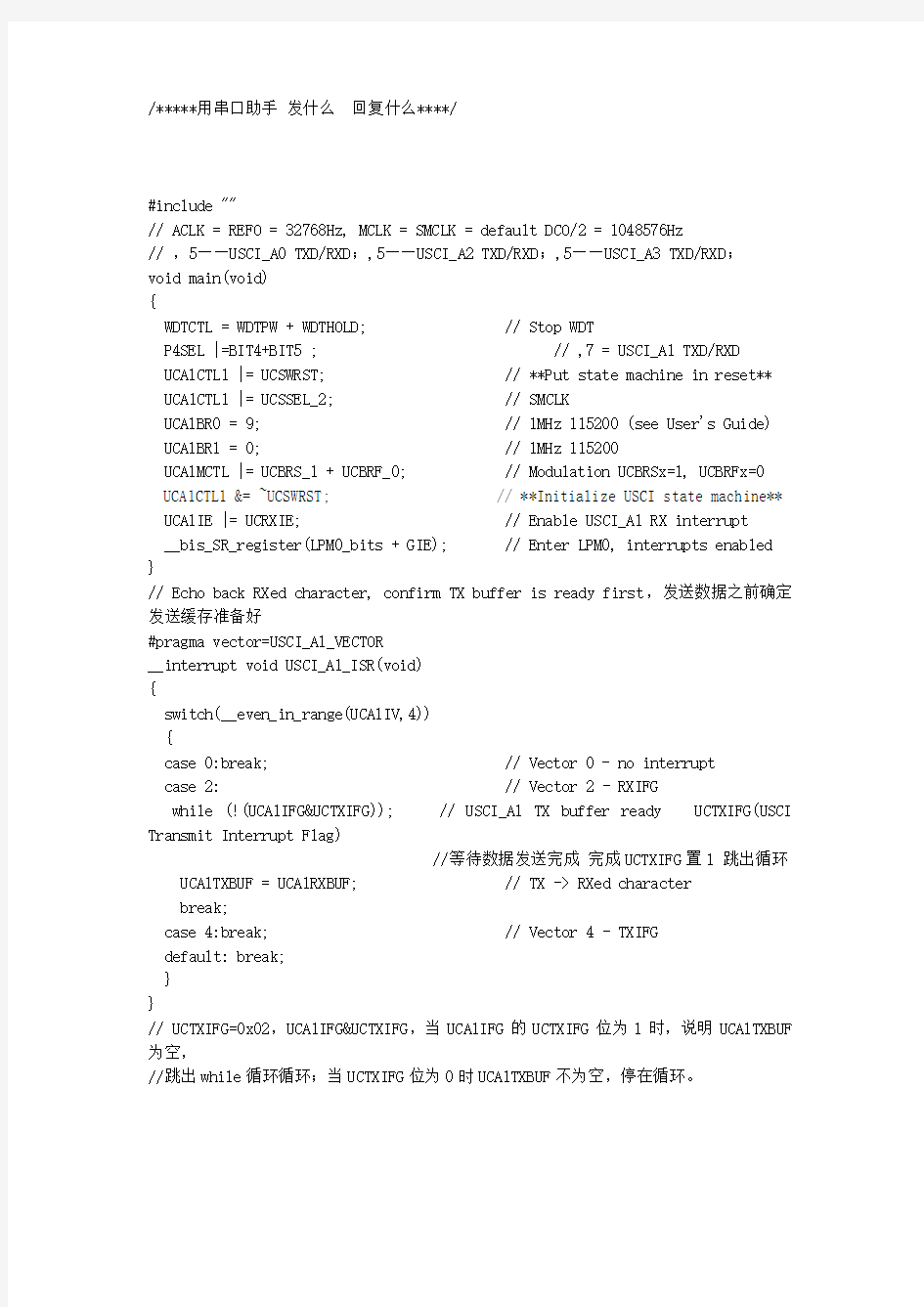
/*****用串口助手发什么回复什么****/
#include ""
// ACLK = REFO = 32768Hz, MCLK = SMCLK = default DCO/2 = 1048576Hz
// ,5——USCI_A0 TXD/RXD;,5——USCI_A2 TXD/RXD;,5——USCI_A3 TXD/RXD;
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
P4SEL |=BIT4+BIT5 ; // ,7 = USCI_A1 TXD/RXD
UCA1CTL1 |= UCSWRST; // **Put state machine in reset**
UCA1CTL1 |= UCSSEL_2; // SMCLK
UCA1BR0 = 9; // 1MHz 115200 (see User's Guide)
UCA1BR1 = 0; // 1MHz 115200
UCA1MCTL |= UCBRS_1 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine** UCA1IE |= UCRXIE; // Enable USCI_A1 RX interrupt
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0, interrupts enabled
}
// Echo back RXed character, confirm TX buffer is ready first,发送数据之前确定发送缓存准备好
#pragma vector=USCI_A1_VECTOR
__interrupt void USCI_A1_ISR(void)
{
switch(__even_in_range(UCA1IV,4))
{
case 0:break; // Vector 0 - no interrupt
case 2: // Vector 2 - RXIFG
while (!(UCA1IFG&UCTXIFG)); // USCI_A1 TX buffer ready UCTXIFG(USCI Transmit Interrupt Flag)
//等待数据发送完成完成UCTXIFG置1 跳出循环 UCA1TXBUF = UCA1RXBUF; // TX -> RXed character
break;
case 4:break; // Vector 4 - TXIFG
default: break;
}
}
// UCTXIFG=0x02,UCA1IFG&UCTXIFG,当UCA1IFG的UCTXIFG位为1时,说明UCA1TXBUF 为空,
//跳出while循环循环;当UCTXIFG位为0时UCA1TXBUF不为空,停在循环。
/********************* 头文件*************************************************/ #include MSP430程序库<二>UART异步串口 串行通信接口是处理器与其他设备进行数据通信最常用的方式之一。我的这个程序库是针对MSP430f14系列和MSP430f16系列的,我常用的单片机是这两款:msp430f149,ms p430f169。这两款单片机中均有两个增强型串行通信接口,都可以进行同步或是异步通信,甚至169的模块USART0还能进行进行I2C协议通信。在这里,我们只讨论异步串行通信。 硬件介绍: MSP单片机的USART模块可以配置成SPI(同步通信)模式或UART(异步通信)模式,这里只讨论UART方式。UART数据传输格式如下: 起始位,数据位由高到低7/8位,地址位0/1位,奇偶校验位奇偶或无,停止位1/2位。数据位位数、地址位、奇偶校验位、停止位均可由单片机内部寄存器控制;这两款单片机都有两个USART模块,有两套独立的寄存器组;以下寄存器命中出现x代表0或是1,0代表对应0模块的寄存器,1代表对应1模块的寄存器;其中,与串口模式设置相关的控制位都位于UxCTL寄存器,与接收相关的控制位都位于UxRCTL寄存器,与发送相关的控制位都位于UxTCTL寄存器;波特率设置用UxBR0、UxBR1、UxMCT L三个寄存器;接收与发送有独立的缓存UxRXBUF、UxTXBUF,并具有独立的移位寄存器和独立的中断;中断允许控制位位于IE1/2寄存器,中断标志位位于IFG1/2寄存器。 波特率设置:430的波特率设置用三个寄存器实现, UxBR0:波特率发生器分频系数低8位。 UxBR1:波特率发生器分频系数高8位。 UxMCTL:波特率发生器分频系数的小数部分实现。 设置波特率时,首先要选择合适的时钟源:USART模块可以设置的时钟源有UCLK引脚、ACLK、SMCLK;对于较低的波特率(9600以下),可选ACLK作为时钟源,这样,在LPM3(低功耗3)模式下,串口仍能正常发送接收数据;另外,由于串口接收过程有一个三取二判决逻辑,这至少需要三个时钟周期,因此分频系数必须大于3;波特率高于9600时,将不能使用ACLK作为时钟源,要调为频率较高的SMCLK作为时钟源;另外还可以外部输入UCLK时钟。分频系数计算公式如下: 【最新整理,下载后即可编辑】 实验一:判断一个数X的正,负数,还是零。(假设是正数,输出+,是负数,输出-,是零,输出This is a zore !) DATA SEGMENT X DB 10 CR EQU 0DH LF EQU 0AH W DB 'This is a zore!',CR,LF,'$' ZHENG DB '+',CR,LF,'$' FU DB '-',CR,LF,'$' DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA START:MOV AX,DATA MOV DS,AX MOV AL,X AND AL,AL JZ L1 SHL AL,1 JC L3 JMP L2 L1: MOV DX,OFFSET W MOV AH,9 INT 21H JMP L4 L2: MOV DX,OFFSET ZHENG MOV AH,9 INT 21H JMP L4 L3: MOV DX,OFFSET FU MOV AH,9 INT 21H L4: MOV AH,4CH INT 21H CODE ENDS END START 实验二:求十个数中的最小数,并以十进制输出。(若要求最大的,只要把JC 改为JNC 即可)(仅局限于0---16间的数比较,因为ADD AL,30H只是针对一位的十六进制转换十进制的算法)DATA SEGMENT XDAT DB 0AH,1FH,02H,03H,04H,05H,06H,07H,08H,09H MIN DB ? CR EQU 0DH LF EQU 0AH W DB ' is min',CR,LF,'$' DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA START:MOV AX,DATA MOV DS,AX MOV CX,9 MOV SI,OFFSET XDAT MOV AL,[SI] L2: CMP AL,[SI+1] JC L1 MOV AL,[SI+1] L1: INC SI LOOP L2 ADD AL,30H MOV DL,AL MOV AH,2 2.5 UART串口通信设计实例(1) 接下来用刚才采用的方法设计一个典型实例。在一般的嵌入式开发和FPGA设计中,串口UART是使用非常频繁的一种调试手段。下面我们将使用Verilog RTL编程设计一个串口收发模块。这个实例虽然简单,但是在后续的调试开发中,串口使用的次数比较多,这里阐明它的设计方案,不仅仅是为了讲解RTL编程,而且为了后续使用兼容ARM9内核实现嵌入式开发。 串口在一般的台式机上都会有。随着笔记本电脑的使用,一般会采用USB转串口的方案虚拟一个串口供笔记本使用。图2-7为UART串口的结构图。串口具有9个引脚,但是真正连接入FPGA开发板的一般只有两个引脚。这两个引脚是:发送引脚TxD和接收引脚RxD。由于是串行发送数据,因此如果开发板发送数据的话,则要通过TxD线1 bit接着1 bit 发送。在接收时,同样通过RxD引脚1 bit接着1 bit接收。 再看看串口发送/接收的数据格式(见图2-8)。在TxD或RxD这样的单线上,是从一个周期的低电平开始,以一个周期的高电平结束的。它中间包含8个周期的数据位和一个周期针对8位数据的奇偶校验位。每次传送一字节数据,它包含的8位是由低位开始传送,最后一位传送的是第7位。 这个设计有两个目的:一是从串口中接收数据,发送到输出端口。接收的时候是串行的,也就是一个接一个的;但是发送到输出端口时,我们希望是8位放在一起,成为并行状态(见图2-10)。我们知道,串口中出现信号,是没有先兆的。如果出现了串行数据,则如何通知到输出端口呢?我们引入“接收有效”端口。“接收有效”端口在一般情况下都是低电平,一旦有数据到来时,它就变成高电平。下一个模块在得知“接收有效”信号为高电平时,它就明白:新到了一个字节的数据,放在“接收字节”端口里面。 24个汇编小程序 题目列表: 逆序输出字符串“BASED ADDRESSING” 从键盘上输入两个数,分别放到x,y单元,求出它们的和 试编写一段程序,要求在长度为10h的数组中,找出大于42h的无符号数的个数并存入地址为up开始区域,找出小于42h的无符号数的个数并存入地址为down的开始区域 键盘输入一段字符串,其中小写字母以大写字母输出,其他字符不变输出 从键盘上就收一个小写字母,找出它的前导字符和后续字符,在顺序显示这三个字符 把一个包含20个数据的数组M分成两组:正整数组P和负整数组N,分别把这两个数组中的数据的个数显示出来 求出首地址为data的100个字数组中的最小偶数,并把它放在ax中 输入两船字符串string1和string2,并比较两个字符串是否相等,相等就显示“match”,否则显示“no match” 从键盘接收一个四位的十六进制数,并在终端显示与它等值的二进制数 从键盘输入一系列以$为结束符的字符串,然后对其中的非数字字符计数,并显示计数结果 有一个首地址为mem的100个字的数组,试编程序删除数组中所有为零的项,并将后续项向前压缩,最后将数组的剩余部分补上零 从键盘上输入一串字符(用回车键结束,使用10号功能调用)放在string中,是编制一个程序测试字符串中是否存在数字。如有,则把cl的第五位置1,否则将该位置置0 在首地址为data的字数组中,存放了100h的16位字数据,试编写一个程序,求出平均值放在ax寄存器中,并求出数组中有多少个数小于此平均值,将结果放在bx寄存器中(f分别考虑有符号数、无符号数情况) 一直数组A包含15个互不相等的整数,数组B包含20个互不相等的整数。试编制一个程序,把既在A中又在B中出现的整数存放于数组C中 设在A、B和D单元中分别存放着三个数。若三个数都不是0,则求出三个数的和并存放在S单元,若其中有一个数为0,则把其它两个单元也清零。请编写此程序 这个程序没有仿真、没有测试。。 1 UART功能设计 1.1 UART的工作原理 异步通信时,UART发送/接收数据的传输格式如图1所示,一个字符单位由开始位、数据位、停止位组成。 异步通信的一帧传输经历以下步骤: (1)无传输。发送方连续发送信号,处于信息“1”状态。 (2)起始传输。发送方在任何时刻将传号变成空号,即“1”跳变到“O”,并持续1位时间表明发送方开始传输数据。而同时,接收方收到空号后,开始与发送方同步,并期望收到随后的数据。 (3)奇偶传输。数据传输之后是可供选择的奇偶位发送或接收。 (4)停止传输。最后是发送或接收的停止位,其状态恒为“1”。 其程序的结构框图如下: 该程序的效果是串口接受到从计算机发送过来的数据后,又把数据发回给计算机,串口通信是串行的。 其uart.v为顶层文件,包含其他模块,speed_select.v文件的作用为为uart_rx.v和uart_tx.v 设置波特率。 uart.v(顶层文件) `timescale 1ns / 1ps ///////////////////////////////////////////////////////////////////// ///////////// // Company: // Engineer: // // Create Date: 16:08:27 11/12/2010 // Design Name: // Module Name: uart // Project Name: // Target Devices: // Tool versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // ///////////////////////////////////////////////////////////////////// ///////////// module uart(clk,rst_n,rs232_rx,rs232_tx); input clk,rst_n,rs232_rx; output rs232_tx; wire bps_start1,bps_start2,clk_bps1,clk_bps2,rx_int; wire [7:0] rx_data; //发送模块的时钟 speed_select speed_tx ( .clk(clk), .rst_n(rst_n), .bps_start(bps_start2), .clk_bps(clk_bps1) ); //接受模块的时钟 speed_select speed_rx ( .clk(clk), .rst_n(rst_n), .bps_start(bps_start2), .clk_bps(clk_bps2) ========================================== 5.编写一个数组排序(从小到大)的小程序,数组在程序中定义,程序先将原数组显示一遍,然后排序,再将排好序的数组显示一遍。 ========================================== AAA SEGMENT BUF DB '45$' L = $ - BUF ary dw -897,345,6789,8654,-1234, -3456,-99,-678,987,567, 32762,-12121,0,3434,4645,-234, 23455,-100,100,1000,-1000 dw 572,-2345,-6543,-1234,9999 | len dw ($-ary)/2 ASSUME CS:AAA, DS:AAA MAIN PROC FAR PUSH CS POP DS LEA SI,ARY MOV CX,LEN NEXT3: MOV BX,[SI] CALL DISP CALL SPACE - ADD SI,2 LOOP NEXT3 CALL CRLF CALL CRLF LEA SI,ARY MOV CX,LEN CALL SORT LEA SI,ARY MOV CX,LEN NEXT5: MOV BX,[SI] CALL DISP … CALL SPACE ADD SI,2 LOOP NEXT5 MOV AH,4CH INT 21H MAIN ENDP DISP PROC PUSH SI PUSH AX PUSH BX ! PUSH DX PUSH CX MOV CX,0 CMP BX,0 JNL NEXT1 NEG BX MOV CX,1 NEXT1: LEA SI,BUF+l-1 MOV AX,BX MOV BX,10 NEXT: MOV DX,0 } DIV BX ADD DL,30H DEC SI MOV [SI],DL CMP AX,0 JNE NEXT CMP CX,0 JE NEXT2 DEC SI MOV BYTE PTR [SI],'-' NEXT2: MOV DX,SI ! MOV AH,9 INT 21H POP CX POP DX POP BX POP AX POP SI RET DISP ENDP SORT PROC ( NEXTT: PUSH CX MOV DI,SI MOV AX,[SI] NEXT0: CMP AX,[DI] JL NEXTQ MOV BX,AX MOV AX,[DI] MOV [DI],BX NEXTQ: ADD DI,2 LOOP NEXT0 MOV [SI],AX … ADD SI,2 POP CX LOOP NEXTT RET SORT ENDP CRLF PROC PUSH AX PUSH DX MOV DL,13 实验八、UART串口通信实验 一、实验目的 1. 了解RS232通信接口的基本原理; 2. 熟悉通信接口芯片(TL16C550C)在DSP I/O空间寄存器的地址映射 及工作原理; 3.了解异步通信中串口模式选择、设置数据传输格式、设置波特率、建立连接、传输数据和断开连接等功能。 二、实验设备 1. 集成开发环境CCS 2. 实验开发板TMS320VC5402DSK、RS232接口电缆线及附件 3.程序“串口调试程序v2.2.exe” 三、实验内容及步骤 实验操作流程参照前面实验。 1 在汇编环境调试Uart:(实现字符或文件的发送和回发功能) a. 实验代码main.s54、uartasm.cmd和uart_init.s54、dsp_init.s54 以及uartasm.h54,c5402_dsk.gel(说明同前)。 b. 串口调试程序“串口调试程序v2.2.exe” , 汇编调试中Build option设置情况与CODEC实验中的汇编调试设置及出错情况相同。 c. 程序文件介绍: 1)“uart.h54”定义了一些寄存器的地址以及函数类型。 2)“dsp_init.s54”与dsp工作有关的寄存器ST1、PMST、IMR、IFR和SWWSR,并且清除INTM位以及设定时钟模式。 3)“uart_init.s54”先检测UART模块是否工作正常,然后设定UART模块的寄存器,如CNTL1、CNTL2、LCR、MSB&LSB(设定波特率)、FCR、IER 等。 4)“main.s54”主程序查看标志位,检测是否UART存在有效接收数据。若有,则执行一定的处理,包括亮LED以及将接收的数据从UART回发。 d. 执行程序时,只要发送数据时,可在串口调试程序的接收窗口立即看到回发的数据。 e. 程序中UART工作参数设置如下: 1)波特率9600(或更低)、无数据校验、字符长度8比特、停止位1、 //UART实验程序解析 //头文件 #include ROM_UARTCharGetNonBlocking(UART0_BASE)); } } //串口发送函数 void UARTSend(const ui8 *pucBuffer, ui32 ulCount) { while(ulCount--) { //将要发送的字符写进UART ROM_UARTCharPutNonBlocking(UART0_BASE, *pucBuffer++); } } int main(void) { //使能FPU FPUEnable(); FPULazyStackingEnable(); //设置时钟直接使用外部晶振 ROM_SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ); //使能用到的外设 ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA); ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0); //配置PA0和PA1为串口0引脚 ROM_GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1); 16进制转化为10进制STACK SEGMENT STACK'STACK' DW100H DUP(?) TOP LABEL WORD STACK ENDS DATA SEGMENT KEYBUFFER DB100 ;DB ? ;DB 100 DUP(?) DECIMAL DB 5 DUP(?) STRING1 DB'PLEASE INPUT DECIMAL DATA:$' DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,ES:DATA,CS:STACK START: MOV AX,DATA MOV DS,AX MOV ES,AX MOV SS,AX LEA SP,TOP LEA DX,STRING1 MOV AH,09H INT 21H MOV AH,0AH LEA DX,KEYBUFFER ;MOV AX,23456 INT 21H ;LEA SI,KEYBUFFER MOV AX,DX LEA DI,DECIMAL CALL DISPAX MOV AH,4CH MOV AL,0 INT 21H DISPAX PROC NEAR PUSH AX PUSH BX PUSH CX PUSH DX PUSH DI LEA DI,DECIMAL CALL TRANS16TO10 MOV CX,5 LEA DI,DECIMAL+4 MOV AH,2 DISPAXD: MOV DL,[DI] ADD DL,30H DEC DI INT 21H LOOP DISPAXD POP DI POP DX POP CX POP BX POP AX RET DISPAX ENDP TRANS16TO10 PROC NEAR PUSH AX PUSH BX PUSH CX PUSH DX PUSH DI MOV BX,10 MOV CX,5 LOOP1: XOR DX,DX DIV BX MOV[DI],DX INC DI LOOP LOOP1 LEA DX,DECIMAL MOV AH,09H INT 21H POP DI POP DX POP CX POP BX POP AX RET TRANS16TO10 ENDP UART异步串行口 UART异步串行口简介 数据通信的基本方式可分为并行通信与串行通信两种: 并行通信:是指利用多条数据传输线将一个资料的各位同时传送。它的特点是传输速度快,适用于短距离通信,但要求通讯速率较高的应用场合。 串行通信:是指利用一条传输线将资料一位位地顺序传送。特点是通信线路简单,利用简单的线缆就可实现通信,降低成本,适用于远距离通信,但传输速度慢的应用场合。 UART 异步串行口的传输格式 异步通信以一个字符为传输单位,通信中两个字符间的时间间隔是不固定的,然 而在同一个字符中的两个相邻位代码间的时间间隔是固定的。 通信协议(通信规程):是指通信双方约定的一些规则。在使用异步串口传送一个 字符的信息时,对资料格式有如下约定:规定有空闲位、起始位、资料位、奇偶校验位、停止位。通讯时序图如下: 开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0”作为 起始位,然后出现在通信线上的是字符的二进制编码数据。 每个字符的数据位长可以约定为5 位、6 位、7 位或8 位,一般采用ASCII 编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇 数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。 最后是表示停止位的“1”信号,这个停止位可以约定持续1 位、1.5 位或2 位 的时间宽度。 至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。 每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特 率为110,150,300,600,1200,2400,4800,9600 ,19200,38400,115200等。 S3C2410的异步串行口 1 // UART_FPGA.v 顶层模块,实现由ARM控制FPGA读取串口数据,经过ARM返回给FPGA串口发送出去; `timescale 1ns/1ns module UART_FPGA( //EMIF PIN input wire [10:0] EADDR_pin /* synthesis syn_noclockbuf = 1 */, inout wire [15:0] EDATA_pin , input wire EnOE_pin /* synthesis syn_noclockbuf = 1 */, input wire EnWE_pin /* synthesis syn_noclockbuf = 1 */, input wire EnGCS1_pin /* synthesis syn_noclockbuf = 1 */, output wire EINT2_pin , //LED_run output wire LED_run_pin , //UART output wire UART_TXD0 , input wire UART_RXD0 /* synthesis syn_noclockbuf = 1 */, //test signal output wire TXD_test, output wire RXD_test, output reg TXD_start, output wire EINT2_test, output wire TXD_over_test, output wire uart_send_WR, //FPGA SYSTEM PIN input wire nRESET_pin /* synthesis syn_noclockbuf = 1 */, input wire CLK_50M_pin ); wire [15:0] write_data; 简单描述: SPI 和I2C这两种通信方式都是短距离的,芯片和芯片之间或者其他元器件如传感器和芯片之间的通信。SPI和IIC是板上通信,IIC有时也会做板间通信,不过距离甚短,不过超过一米,例如一些触摸屏,手机液晶屏那些很薄膜排线很多用IIC,I2C能用于替代标准的并行总线,能连接的各种集成电路和功能模块。I2C 是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。多路微控制器能在同一个I2C总线上共存这两种线属于低速传输; 而UART是应用于两个设备之间的通信,如用单片机做好的设备和计算机的通信。这样的通信可以做长距离的。UART和,UART就是我们指的串口,速度比上面三者快,最高达100K左右,用与计算机与设备或者计算机和计算之间通信,但有效范围不会很长,约10米左右,UART优点是支持面广,程序设计结构很简单,随着USB的发展,UART也逐渐走向下坡; SmBus有点类似于USB设备跟计算机那样的短距离通信。 简单的狭义的说SPI和I2C是做在电路板上的。而UART和SMBUS是在机器外面连接两个机器的。 详细描述: 1、UART(TX,RX)就是两线,一根发送一根接收,可以全双工通信,线数也比较少。数据是异步传输的,对双方的时序要求比较严格,通信速度也不是很快。在多机通信上面用的最多。 2、SPI(CLK,I/O,O,CS)接口和上面UART相比,多了一条同步时钟线,上面UART 的缺点也就是它的优点了,对通信双方的时序要求不严格不同设备之间可以很容易结合,而且通信速度非常快。一般用在产品内部元件之间的高速数据通信上面,如大容量存储器等。 3、I2C(SCL,SDA)接口也是两线接口,它是两根线之间通过复杂的逻辑关系传输数据的,通信速度不高,程序写起来也比较复杂。一般单片机系统里主要用来和24C02等小容易存储器连接。 SPI:高速同步串行口。3~4线接口,收发独立、可同步进行 UART:通用异步串行口。按照标准波特率完成双向通讯,速度慢 SPI:一种串行传输方式,三线制,网上可找到其通信协议和用法的 3根线实现数据双向传输 串行外围接口 Serial peripheral interface UART:通用异步收发器 UART是用于控制计算机与串行设备的芯片。有一点要注意的是,它提供了 module my_uart_top( clk,rst_n, rs232_rx,rs232_tx ); input clk; lk(clk), st_n(rst_n), .bps_start(bps_start1), .clk_bps(clk_bps1) , ); my_uart_rx my_uart_rx( .clk(clk), st_n(rst_n), .rs232_rx(rs232_rx), .rx_data(rx_data), .rx_int(rx_int), .clk_bps(clk_bps1), % .bps_start(bps_start1) ); lk(clk), st_n(rst_n), .bps_start(bps_start2), .clk_bps(clk_bps2) ); ` my_uart_tx my_uart_tx( .clk(clk), st_n(rst_n), .rx_data(rx_data), .rx_int(rx_int), .rs232_tx(rs232_tx), .clk_bps(clk_bps2), .bps_start(bps_start2) ); . endmodule module my_uart_rx( clk,rst_n, rs232_rx,rx_data,rx_int, … clk_bps,bps_start ); input clk; // 50MHz主时钟 input rst_n; //低电平复位信号 input rs232_rx; // RS232接收数据信号 input clk_bps; // clk_bps的高电平为接收或者发送数据位的中间采样点 output bps_start; //接收到数据后,波特率时钟启动信号置位 ` output[7:0] rx_data; //接收数据寄存器,保存直至下一个数据来到 output rx_int; //接收数据中断信号,接收到数据期间始终为高电平 //---------------------------------------------------------------- reg rs232_rx0,rs232_rx1,rs232_rx2,rs232_rx3; //接收数据寄存器,滤波用 wire neg_rs232_rx; //表示数据线接收到下降沿 always @ (posedge clk or negedge rst_n) begin { if(!rst_n) begin rs232_rx0 <= 1'b0; rs232_rx1 <= 1'b0; rs232_rx2 <= 1'b0; rs232_rx3 <= 1'b0; end else begin rs232_rx0 <= rs232_rx; : rs232_rx1 <= rs232_rx0; rs232_rx2 <= rs232_rx1; rs232_rx3 <= rs232_rx2; end end //下面的下降沿检测可以滤掉<20ns-40ns的毛刺(包括高脉冲和低脉冲毛刺), //这里就是用资源换稳定(前提是我们对时间要求不是那么苛刻,因为输入信号打了好几拍) //(当然我们的有效低脉冲信号肯定是远远大于40ns的) , assign neg_rs232_rx = rs232_rx3 & rs232_rx2 & ~rs232_rx1 & ~rs232_rx0; //接收到下降沿后neg_rs232_rx置高一个时钟周期 //---------------------------------------------------------------- reg bps_start_r; reg[3:0] num; //移位次数 reg rx_int; //接收数据中断信号,接收到数据期间始终为高电平 ---------程序sy3-1:实现从键盘输入一位数字,判断其奇偶性。并在屏幕上输出一个标志,若为奇数,则输出1;否则输出0。 ---------如果输入的不是数字,则显示字符串“ERROR”。 DATAS SEGMENT STRING DB "ERROR$" ;定义字符串 FLAG DB ? ;设置奇偶标志 DATAS ENDS CODES SEGMENT ASSUME CS:CODES,DS:DATAS START: MOV AX,DATAS MOV DS,AX MOV FLAG,'1' ;给标志位FLAG赋初值 MOV AH,01H INT 21H ;接收键盘输入一位数 CMP AL,30H JB ERR CMP AL,39H JA ERR TEST AL,01H ;测试,根据最后一位判断奇偶性 JNZ OUTPUT ;不为0则为奇数 MOV FLAG,'0' OUTPUT: MOV DL,FLAG MOV AH,02H INT 21H ;输出标志位 JMP EXIT ERR: ;显示字符串 MOV DX,OFFSET STRING MOV AH,9 INT 21H EXIT: MOV AH,4CH INT 21H CODES ENDS END START ;---------程序sy3-2:根据用户输入的星期几数字代号(0代表星期天),在屏幕上显示相应的英文缩写名。 DATAS SEGMENT s0 db "Sun$" S1 DB "Mon$" S2 DB "Tue$" S3 DB "Wed$" S4 DB "Thu$" S5 DB "Fri$" S6 DB "Sat$" ADDR_TABLE DW S0,S1,S2,S3,S4,S5,S6 ;定义地址表 DATAS ENDS STACKS SEGMENT ;此处输入堆栈段代码 STACKS ENDS CODES SEGMENT ASSUME CS:CODES,DS:DATAS,SS:STACKS START: MOV AX,DATAS MOV DS,AX MOV AH,1 INT 21H ;接受键盘输入 CMP AL,30H JB EXIT CMP AL,36H ;不是数字0~6,则退出程序 JA EXIT SUB AL,30H ;转变为数字 MOV BL,2 MUL BL ;数字乘以2的结果是在地址表中的相应位置的偏移值MOV BX,AX ;将输入的数字转换为地址表中的偏移地址 MOV DX,ADDR_TABLE[BX] ;取地址表中的相应内容(即DX为字符串的偏移地址)MOV AH,9 INT 21H ;显示字符串 EXIT: MOV AH,4CH INT 21H CODES ENDS END START 实验四 UART 串口通信 学院:研究生院 学号:1400030034 姓名:张秋明 一、 实验目的及要求 设计一个UART 串口通信协议,实现“串 <-->并”转换功能的电路,也就是 “通用异步收发器”。 二、 实验原理 UART 是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实 现全双工传输和接收。在嵌入式设计中,UART 用来主机与辅助设备通信,如汽 车音响与外接AP 之间的通信,与PC 机通信包括与监控调试器和其它器件,如 EEPROM 通信。 UART 作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一 位接一位地传输。 其中各位的意义如下: 起始位:先发出一个逻辑” 0的信号,表示传输字符的开始。 资料位:紧接着起始位之后。资料位的个数可以是 4、5、6、7、8等,构成 一个字符。通常采用ASCII 码。从最低位开始传送,靠时钟定位。 奇偶校验位:资料位加上这一位后,使得“ 1的位数应为偶数(偶校验)或奇数 (奇校验),以此来校验资料传送的正确性。 停止位:它是一个字符数据的结束标志。可以是 1位、1.5位、2位的高电 平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能 在通信中两台设备间出现了小小的不同步。 因此停止位不仅仅是表示传输的结束, 并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步 的容忍程度越大,但是数据传输率同时也越慢。 空闲位:处于逻辑“ 1状态,表示当前线路上没有资料传送。 波特率:是衡量资料传送速率的指标。表示每秒钟传送的符号数(symbol )。 一个符号代表的信息量(比特数)与符号的阶数有关。例如资料传送速率为 120 字符/秒,传输使用256阶符号,每个符号代表8bit ,则波特率就是120baud,比 特率是120*8=960bit/s 。这两者的概念很容易搞错。 三、 实现程序 library ieee; use ieee.std 」o gic_1164.all; end uart; architecture behav of uart is en tity uart is port(clk : in std_logic; rst_n: in std 」o gic --系统时钟 --复位信号 rs232_rx: in std 」o gic rs232_tx: out std 」o gic --RS232接收数据信号; --RS232发送数据信号;); use ieee.std_logic_ un sig ned.all; 实验一:判断一个数X的正,负数,还是零。(假设是正数,输出+,是负数,输出-,是零,输出This is a zore !) DATA SEGMENT X DB 10 CR EQU 0DH LF EQU 0AH W DB 'This is a zore!',CR,LF,'$' ZHENG DB '+',CR,LF,'$' FU DB '-',CR,LF,'$' DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA START:MOV AX,DATA MOV DS,AX MOV AL,X AND AL,AL JZ L1 SHL AL,1 JC L3 JMP L2 L1: MOV DX,OFFSET W MOV AH,9 INT 21H JMP L4 L2: MOV DX,OFFSET ZHENG MOV AH,9 INT 21H JMP L4 L3: MOV DX,OFFSET FU MOV AH,9 INT 21H JMP L4 L4: MOV AH,4CH INT 21H CODE ENDS END START 实验二:求十个数中的最小数,并以十进制输出。(若要求最大的,只要把JC 改为JNC 即可)(仅局限于0---16间的数比较,因为ADD AL,30H只是针对一位的十六进制转换十进制的算法) DATA SEGMENT XDAT DB 0AH,1FH,02H,03H,04H,05H,06H,07H,08H,09H MIN DB ? CR EQU 0DH W DB ' is min',CR,LF,'$' DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA START:MOV AX,DATA MOV DS,AX MOV CX,9 MOV SI,OFFSET XDAT MOV AL,[SI] L2: CMP AL,[SI+1] JC L1 MOV AL,[SI+1] L1: INC SI LOOP L2 ADD AL,30H MOV DL,AL MOV AH,2 INT 21H MOV DX,OFFSET W MOV AH,9 INT 21H CODE ENDS END START 实验三:设有3个单字节无符号数存放在BUF开始的缓冲区中,编写一个能将它们从大到小从新排列的程序。 DATA SEGMENT BUF DB 87,234,123 DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA START:MOV AX,DATA MOV DS,AX MOV SI,OFFSET BUF MOV AL,[SI] ;把3个数取到寄存器中 MOV BL,[SI+1] MOV CL,[SI+2] CMP AL,BL ;排序,将最大数送AL寄存器 JAE NEXT1 XCHG AL,BL NEXT1:CMP AL,CL JAE NEXT2 XCHG AL,CL NEXT2:CMP BL,CL ;将最小输送CL寄存器 实验四UART串口通信 学院:研究生院学号:1400030034姓名:张秋明 一、实验目的及要求 设计一个UART串口通信协议,实现“串<-->并”转换功能的电路,也就是“通用异步收发器”。 二、实验原理 UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来主机与辅助设备通信,如汽车音响与外接AP之间的通信,与PC机通信包括与监控调试器和其它器件,如EEPROM通信。 UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。 其中各位的意义如下: 起始位:先发出一个逻辑”0”的信号,表示传输字符的开始。 资料位:紧接着起始位之后。资料位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII码。从最低位开始传送,靠时钟定位。 奇偶校验位:资料位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。 停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。 空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。 波特率:是衡量资料传送速率的指标。表示每秒钟传送的符号数(symbol)。一个符号代表的信息量(比特数)与符号的阶数有关。例如资料传送速率为120字符/秒,传输使用256阶符号,每个符号代表8bit,则波特率就是120baud,比特率是120*8=960bit/s。这两者的概念很容易搞错。 三、实现程序 library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_arith.all; use ieee.std_logic_unsigned.all; entity uart is port(clk : in std_logic; --系统时钟 rst_n: in std_logic; --复位信号 rs232_rx: in std_logic; --RS232接收数据信号; rs232_tx: out std_logic --RS232发送数据信号;); end uart; architecture behav of uart isUART异步串口
汇编经典小程序(精编文档).doc
UART串口通信设计实例
24个汇编实例小程序
Verilog程序6、UART(串口通信)
8086汇编经典例程
dsp实验-UART串口通信实验
UART实验程序解析
汇编语言小程序
UART串行口简介
verilog编写的uart程序
SPI、I2C、UART三种串行总线的原理、区别及应用
Verilog编写的RS232(Uart)程序
汇编小程序
UART串口通信实验报告
汇编经典小程序
UART串口通信实验报告
相关主题
文本预览