ABB交流定子调压、调速技术介绍
冶金炼钢生产用起重机的工作条件通常十分恶劣,而且工作环境大都是在粉尘大、高温、高湿度或室外露天场所等环境中使用。其工作性质是间歇的(时开时停、有时轻载、有时重载),工作负荷属于重复短时工作制。电动机经常处于频繁启动、制动反向工作状态,同时承受较大的机械冲击。并对调速有一定的要求,其调速范围,要求达到5:1—10:1。
ASTA T 全数字式绕线式异步电动机控制器,是适应高要求应用的起重机运行控制的先进控制器。是用于工业起重机重型电动机的高度完善的,历经考验的速度控制系统,能适应最恶劣的运行环境。其可靠的,高性能的价格比,将起重机的控制带入了计算机时代。通过使用现代的计算机技术,工业网络技术,将先进的控制特性与综合信息数据处理相结合后,提高起重机在各个层次和领域的表现。ASTA T的设计更适合高利用率场合,高等级的部件,使其具有比其他一般的工业驱动器更大的优势。主要能完成以下的功能及控制特点:
? 坚固的,紧凑的、低损耗型晶闸管控制综合设计:ASTA T 是一个成熟的晶闸管相位控制的起重机电动机控制系统。它包含了所有起重机控制常用功能,如主令控制器控制,带减速及停止功能的限位开关逻辑,接近零速时的自动制动及闭环速度控制。使用新开发的转矩及电流调节器,并在固有的稳压控制特性支持下,ASTA T 通过改进了起重机的响应优化了电动机控制,并通过控制的平滑处理,减少冲击,延长了部件寿命。能量损耗少,部件寿命长,对于传动系统及操作人员的压力小,这些特点意味着ASTA T 给你更高的利用率及更好的控制。
? 全数字控制系统,保证参数设定不会发生漂移,以及控制器综合信息简明显示:ASTA T 提供了综合的信息,显示方式简单。通过起重机状态的LED 阵列,迅速提供起重机状态的面板显示,使操作者对关键信息一目了然。主令控制器可以是有级或无级。由用户决定是用速度控制还是转矩控制。所有其他操作均为ASTA T 控制系统的内在的组成部分。
? 设备管理开放式的PC应用,用于监测,维护及高度自动化的数据通讯系统。
? 快速的安装及试运转:ASTA T 实现快速,无故障的安装。该系统的模块化特性使之容易适应单一用途的起重机结构,对于电气室的要求较低,主要部件恒温的成本低。电源及控制信号易于连接,布线简单。ASTA T 调试也同样容易。大多数参数在交付前已设置好,现场只需设置少数参数。一种专门的试运转方式允许对机械轴系和主要电路进行快速的现场测试。使用一台标准的个人电脑来设置现场运行参数及通过对话框进行试运转,并可对所有参数进行动态监视,记录,打印。
? 高性能的可选模块式设计,方便灵活的适应不同要求:ASTA T 是一套灵活的模块化系统,针对不同要求有众多的选件。既可选择带测速发电机或脉冲编码器单个传动;也可选择所有控制接线在可控硅控制屏内的全套系统,以对起重机实行全冗余自动化控制。
3 ASTA T起重机专用调速器的系统组成
ASTA T 运行控制器包含:
可控硅模块DASD 电路图代号-A1
控制系统模块DARA电路图代号-A2(和-A3)
转子频率反馈模块DADT 电路图代号-A4
驾驶室I/O 模块DAPM 电路图代号-A5(和-A6)
过压保护DASG 电路图代号-Z1
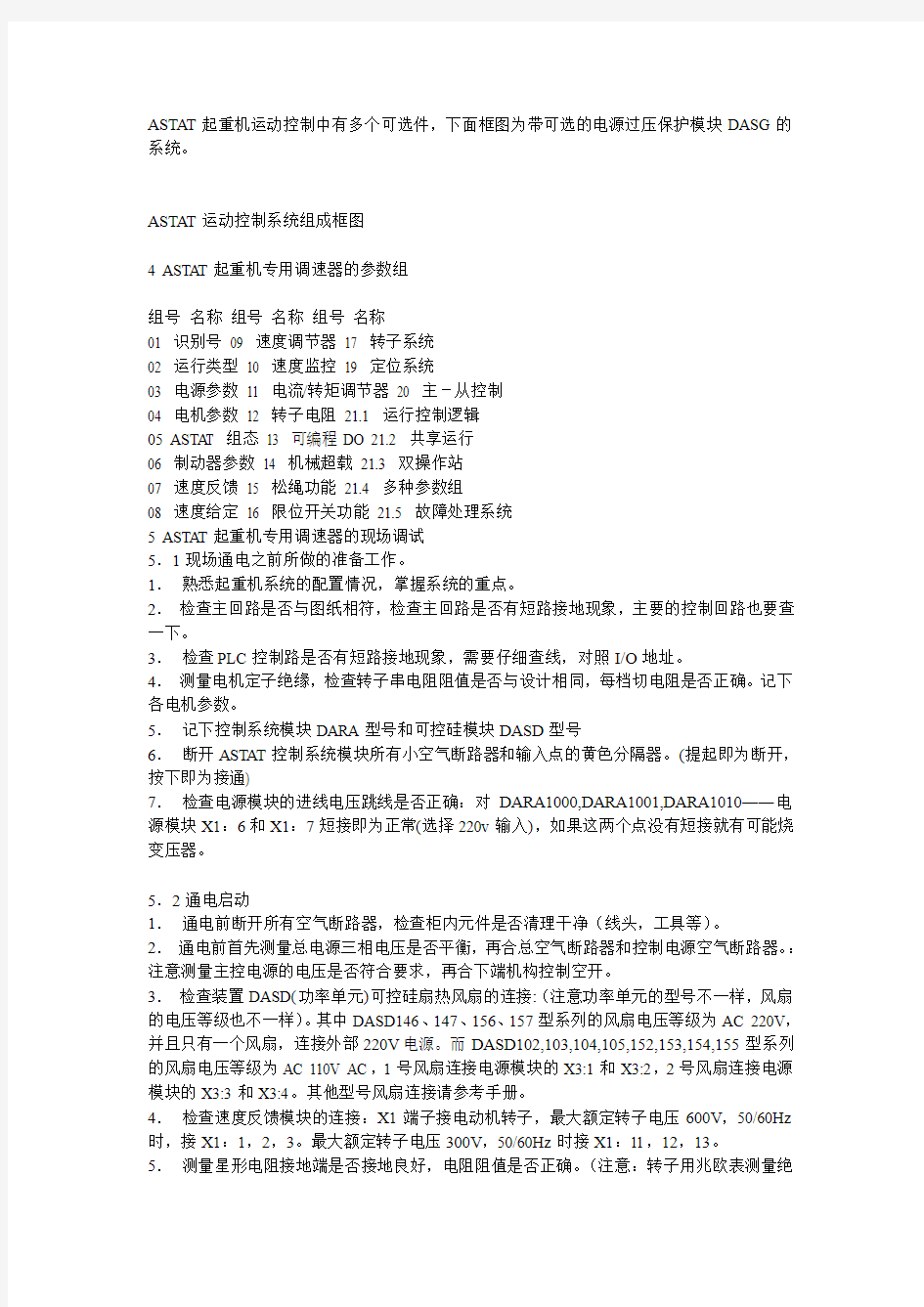
在ASTA T运动控制系统中,电源通过DASD可控硅功率模块向电机提供能量,使电机产生转矩。DARA控制系统模块控制根据所需转速和实际转速控制电压和相序,通过测速发电机、脉冲编码器或者DADT反馈模块测量实际转速,经给定叠加运算后,DARA控制模块来控制DASD可控硅功率模块的电压和外部转子电阻和接触器进行转矩-转速特性的优化,以达到最佳的电机转速-转矩特性曲线。而所需转速给定则来自于驾驶室的DAPM I/O模块。
ASTA T起重机运动控制中有多个可选件,下面框图为带可选的电源过压保护模块DASG的系统。
ASTA T运动控制系统组成框图
4 ASTA T起重机专用调速器的参数组
组号名称组号名称组号名称
01 识别号09 速度调节器17 转子系统
02 运行类型10 速度监控19 定位系统
03 电源参数11 电流/转矩调节器20 主-从控制
04 电机参数12 转子电阻21.1 运行控制逻辑
05 ASTA T 组态13 可编程DO 21.2 共享运行
06 制动器参数14 机械超载21.3 双操作站
07 速度反馈15 松绳功能21.4 多种参数组
08 速度给定16 限位开关功能21.5 故障处理系统
5 ASTA T起重机专用调速器的现场调试
5.1现场通电之前所做的准备工作。
1.熟悉起重机系统的配置情况,掌握系统的重点。
2.检查主回路是否与图纸相符,检查主回路是否有短路接地现象,主要的控制回路也要查一下。
3.检查PLC控制路是否有短路接地现象,需要仔细查线,对照I/O地址。
4.测量电机定子绝缘,检查转子串电阻阻值是否与设计相同,每档切电阻是否正确。记下各电机参数。
5.记下控制系统模块DARA型号和可控硅模块DASD型号
6.断开ASTA T控制系统模块所有小空气断路器和输入点的黄色分隔器。(提起即为断开,按下即为接通)
7.检查电源模块的进线电压跳线是否正确:对DARA1000,DARA1001,DARA1010――电源模块X1:6和X1:7短接即为正常(选择220v输入),如果这两个点没有短接就有可能烧变压器。
5.2通电启动
1.通电前断开所有空气断路器,检查柜内元件是否清理干净(线头,工具等)。
2.通电前首先测量总电源三相电压是否平衡,再合总空气断路器和控制电源空气断路器。:注意测量主控电源的电压是否符合要求,再合下端机构控制空开。
3.检查装置DASD(功率单元)可控硅扇热风扇的连接:(注意功率单元的型号不一样,风扇的电压等级也不一样)。其中DASD146、147、156、157型系列的风扇电压等级为AC 220V,并且只有一个风扇,连接外部220V电源。而DASD102,103,104,105,152,153,154,155型系列的风扇电压等级为AC 110V AC,1号风扇连接电源模块的X3:1和X3:2,2号风扇连接电源模块的X3:3和X3:4。其他型号风扇连接请参考手册。
4.检查速度反馈模块的连接:X1端子接电动机转子,最大额定转子电压600V,50/60Hz 时,接X1:1,2,3。最大额定转子电压300V,50/60Hz时接X1:11,12,13。
5.测量星形电阻接地端是否接地良好,电阻阻值是否正确。(注意:转子用兆欧表测量绝
缘时需断开转子反馈的接线,不然兆欧表的高电压有可能损坏反馈模块;而且还需断开星形电阻,不然测出绝缘为0)
6.合上相应机构辅助电源230(220)V空气断路器。检查风扇是否旋转。
3.检查X1:1,2之间电压是否为230(220)V,然后合上110V DC 开关,观察DA TX110上的110V ok指示灯是否亮起。
4.如果是浮地系统(任何一相都没有接地),请将110v DC接地,看开关会不会跳闸,DA TX110接地故障指示灯是否亮起。
5.对照图纸检查各个DI信号是否正常:用万用表测量相应的外部端子看电压是否是110V 直流电压,检查外部其他电源是否错误的接入了DI端子。确认电压无误后将相应的黄色分隔器按下。动作相应输入看指示灯是否亮起。然后检查完其余所有使用的DI及输入端子。(未使用的点建议黄色分隔器不按下)
5.3系统调试
1.ASTA T系统参数的校验和修改,只需要修改少量的参数即可以运行机构。不需要做自学习的电机辨识。
2.使用制作好的通信电缆将笔记本PC机和控制系统模块的RS232接口连接起来。ASTA T 软件界面操作及使用,请参考系统手册。
3.合上系统主电源后,观察控制系统面板显示器上如果显示5C即为正常。显示代码说明报故障了。相应故障说明请参考系统手册。
4.调试大、小车运行机构时,如果出现电机电流波动较大,或者电机运行震动较大,或者系统响应慢等情况时,请调整第9组参数。这个参数组需要细细调整,一次修改一个参数再动车为好。
5.调试起升机构时,如果起升机构一个方向运行稳定,一个方向运行不稳定,可调节参数11.3来改善其性能。如果起升机构下降各档运行正常,上升各档运行有振动,就将11.3设为5(黙认为10),根据改善效果再适当调整11.3的值。
6 结论
本系统良好的运行效果,说明ABB定子调压、调速技术在桥式起重设备上的技术应用是切实可行的,解决了绕线电机调速无法克服的诸多弊病,效果也较为显著,运行二年多来无大故障,达到了预期的目的。相信通过不断总结经验,不断完善改进,定子调压、调速技术在桥式起重机上的应用,其优越的性价比必然成为将来发展的方向。
定子调压调速技术在炼钢天车的应用 工作单位:酒钢炼轧厂炼钢设备保障作业区作者:裴兴怡
定子调压调速技术在炼钢桥式起重机的应用 摘要:本文主要介绍了三相异步电机的工作原理和调速方法,在调速方法中重点分析对比了转子串电阻调速和晶闸管定子调压调速的基本原理和两种调速方法的各自特点。通过分析对比得知定子调压调速技术在今后的设备改造中将是一种既节约费用,又简单易行的技术方案,同时对炼钢天车技术改造提供了有力的技术支持。 关键字:定子调压调速机械特性串电阻晶闸管 引言: 三相异步电动机的调速经过了长期的演变过程,人们在电动机的调速和转矩控制上做过了大量的研究,尝试过使用各种不同形式的调速方法,随着大功率和高开关频率的半导体器件的开发研制成功,以及现代数字技术的普及应用,为我们提供了驱动控制电动机的新的方法。目前桥式起重机电机调速控制应用最多的是三相绕线式电动机转子串电阻调速,下面就介绍一下用于转子串电阻调速与晶闸管定子调压调速的基本工作原理与优缺点。 1 三相异步电动机工作的基本原理 1.1 基本公式 从电网输入电动机的功率
2 三相异步电动机调速 2.1 转子串电阻调速 主要介绍用于起重机起升机构用的两挡反接控制,机械特性如图1 所示。两挡反接制动是指起升机构在满载或75%负载下,可以达到满速下降的目的。在返回停止工作时可达到准确停车,避免在满载情况下下滑而造成意外事故。上升1、2、3 挡人为逐级切除电动机转子电阻,使电动机由机械特性1、2、3 过渡到机械特性4 上,电动机高速运转。满载慢速下降电动机工作在特性5上,电机转子串进一定的电阻值,使电动机处于反接制动状态。轻载下降电动机工作在特性6 上,此时电动机转子串进全部电阻,使电动机的机械特性变得更软。电动机工作在反接制动状态。 虽然在上面两种反接制动状态下能够得到一定的低速,但是不能长时间运行,否则会造成电机发热严重,此时电机的机械特性都比较软,负载转矩瞬间产生的任何波动都会使电机失去控制,将造成严重后果。所以在操
简易可控硅交流调压器原理图及工作原理介绍 本文介绍一台电路简单、装置容易、控制方便的可控硅交流调压器,这可用作家用电器的调压装置,进行照明灯调光,电风扇调速、电熨斗调温等控制。这台调压器的输出功率达100W,一般家用电器都能使用。 可控硅交流调压器电路原理: 电路图如下可控硅交流调压器由可控整流电路和触发电路两部分组成,其电路原里图如下图所示。从图中可知,二极管D1—D4组成桥式整流电路,双基极二极管T1构成张弛振荡器作为可控硅的同步触发电路。当调压器接上市电后,220V交流电通过负载电阻RL经二极管D1—D4整流,在可控硅SCR的A、K两端形成一个脉动直流电压,该电压由电阻R1降压后作为触发电路的直流电源。在交流电的正半周时,整流电压通过R4、W1对电容C 充电。当充电电压Uc达到T1管的峰值电压Up时,T1管由截止变为导通,于是电容C通过T1管的e、b1结和R2迅速放电,结果在R2上获得一个尖脉冲。这个脉冲作为控制信号送到可控硅SCR的控制极,使可控硅导通。可控硅导通后的管压降很低,一般小于1V,所以张弛振荡器停止工作。当交流电通过零点时,可控硅自关断。当交流电在负半周时,电容 。 C又从新充电……如此周而复始,便可调整负载RL上的功率了 调压器的调节电位器选用阻值为470KΩ的WH114-1型合成碳膜电位器,这种电位器可以直接焊在电路板上,电阻除R1要用功率为1W的金属膜电阻外,其佘的都用功率为1/8W 的碳膜电阻。D1—D4选用反向击穿电压大于300V、最大整流电流大于0.3A的硅整流二极管,如2CZ21B、2CZ83E、2DP3B等。SCR选用正向与反向电压大于300V、额定平均电流大于1A的可控硅整流器件,如国产3CT系例。
可控硅调压调速原理 小功率分体机室内风机目前用的是PG调速塑封电机,为单向异步电容运转电动机。为了满足空调正常的运转,达到制冷、制热能力的平衡,所以必须保证室内风机的转速满足系统的要求,并保持转速的稳定。因此采用可控硅调压调速的方法来调节风机的转速。 1.电路原理图 2.工作原理简介 可控硅调速是用改变可控硅导通角的方法来改变电动机端电压的波形,从而改变电动机端电压的有效值,达到调速的目的。 当可控硅导通角α1=180°时,电动机端电压波形为正弦波,即全导通状态;(图示两种状态)当可 控硅导通角α1 <180°时,电动机端电压波形如图实 线所示,即非全导通状态,有效值减小;α1越小, 导通状态越少,则电压有效值越小,所产生的磁场越 小,则电机的转速越低。但这时电动机电压和电流波 形不连续,波形差,故电动机的噪音大,甚至有明显 的抖动,并带来干扰。这些现象一般是在微风或低风 速时出现,属正常。由以上的分析可知,采用可控硅 调速其电机转速可连续调节。 3.各元器件作用及注意事项 3.1D15、R28、R29、E9、Z1、R30、C1组成降压、整流、虑波稳压电路,获得相对直流电压 12V,通过光电偶合器PC817给双向可控硅BT131提供门极电压; 3.2R25、C15组成RC阻容吸收网络,解决可控硅导通与截止对电网的干扰,使其符合EMI测试标准;同时防止可控硅两端电压突变,造成无门极信号误导通。 3.3TR1选用1A/400V双向可控硅,TR1有方向性,T1、T2不可接反,否则电路不能正常工作。 3.4L2为扼流线圈,防止可控硅回路中电流突变,保护TR1,由于它是储能元件,在TR1关断和导通过程中,尖峰电压接近50V,R24容易受冲击损坏,因此禁止将L2放置在TR1前端。
目录 1.引言 (3) 2.原始资料和数据 (3) 3.电路组成和分析 (4) 3.1工作原理 (4) 3.2对触发脉冲的要求 (5) 3.3晶闸管的选型 (6) 3.4参数计算 (7) 3.5二次相电压U2 (7) 3.6一次与二次额定电流及容量计算 (8) 4.触发电路的设计 (9) 5保护电路的设计 (10) 5.1电力电子器件的保护 (10) 5.2过电压的产生及过电压保护 (11) 5.3过电流保护 (11) 6.缓冲电路的设计 (12) 7.总结 (14) 参考文献 (15) 晶闸管可控整流技术直流电机调速系统设计 摘要:可控整流电路技术在工业生产上应用极广。如调压调速直流电源、电解及电镀的直流电源等。把交流电变换成大小可调的单一方向直流电的过程称为可控整流。整流器的输入端一般接在交流电网上。为了适应负载对电源电压大小的要求,或者为了提高可控整流装置的功率因数,一般可在输入端加接整流变压器,把一次电压U1,变成二次电压U2。由晶闸管等组成的可控整流主电路,其输出端的负载,可以是电阻性负载、大电感性负载以及反电动势负载。以上负载往往要求整流能输出在一定范围内变化的直流电压。为此,只要改变触发 电路所提供的触发脉冲送出的早晚,就能改变晶闸管在交 流电压U2一周期内导通的时间,这样负载上直流平均值就可以得到控制。 该系统以可控硅三相桥式全控整流电路构成系统的主电路,采用同步信号为锯齿波的触发电路,本触发电路分成三个基本环节:同步电压形成、移相控制、脉冲形成和输出。此外,还有双窄脉冲形成环节。同时考虑了保护电路和缓冲电路,通过参数计算对晶闸管进行了选型,也对直流电动机进行了简单的介绍。 关键词:可控整流晶闸管触发电路缓冲电路保护电路 1.引言 当今,自动化控制系统已在各行各业得到广泛的应用和发展,而自动调速控制系统的应用在现代化生产中起着尤为重要的作用,直流调速系统是自动控制系统的主要形式。 由可控硅整流装置供给可调电压的直流调速系统(简称KZ—D系统)和旋转变流机组及其它静止变流装置相比,不仅在经济性和可靠性上有很大提高,而且在技术性能上也显示出较大的优越性。 可控硅虽然有许多优点,但是它承受过电压和过电流的能力较差,很短时间的过电压和过电流就会把器件损坏。为了使器件能够可靠地长期运行,必须针对过电压和过电流发生的原因采用恰当的保护措施。为此,在变压器二次侧并联电阻和电容构成交流侧过电压保护;在直流负载侧并联电阻和电容构成直流侧过电压保护;在可控硅两端并联电阻和电容构成可控硅关断过电压保护;并把快速熔断器直接与可控硅串联,对可控硅起过流保护作用。 随着电力电子器件的大力发展,该方面的用途越来越广泛。由于电力电子装置的电能变换效率高,完成相同的工作任务可以比传统方法节约电能10%~40%,因此它是一项节能技术,整流技术就是其中很重要的一个环节 2.原始数据: 1、输入交流电源:
“运动控制系统”专题实验 实验报告 电子与信息工程学院自动化科学与技术系
(5)可调电阻(NMCL—03) (6)电机导轨及测速发电机(或光电编码器) (7)三相线绕式异步电动机 (8)双踪示波器 (9)万用表 (10)直流发电机M03 四.实验原理 1.系统组成及原理 双闭环三相异步电动机调压调速系统的主电路为三相晶闸管交流电源及三相绕线式异步电动机(转子回路串电阻)。控制系统由电流调节器(ACR),速度调节器(ASR),电流变换器(FBC),速度变换器(FBS),触发器(GT),一组桥脉冲放大器等组成。其系统原理图如图6-1所示。 图6-1 整个调速系统采用了速度,电流两个反馈控制环。这里的速度环作用基本上与直流调速系统相同而电流环的作用则有所不同。在稳定运行情况下,电流环对电网振动仍有较大的抗扰作用,但在起动过程中电流环仅起限制最大电流的作用,不会出现最佳起动的恒流特性,也不可能是恒转矩起动。 异步电机调压调速系统结构简单,采用双闭环系统时静差率较小,且比较容易实现正,反转,反接和能耗制动。但在恒转矩负载下不能长时间低速运行,因低速运行时转差功率 电子与信息工程学院自动化科学与技术系
电子与信息工程学院自动化科学与技术系
电子与信息工程学院自动化科学与技术系
(2)空载电压为200V时 n/(r/min) 1281 1223 1184 1107 1045 I G/A 0.10 0.11 0.12 0.13 0.13 U G/V 182 179 176 166 157 M/(N·m) 0.2265 0.2458 0.2636 0.2814 0.2831 2.闭环系统静特性 n/(r/min) 1420 1415 1418 1415 1416 1412 电子与信息工程学院自动化科学与技术系
一、调速器功用及分类 调速器是一种自动调节装置,它根据柴油机负荷的变化,自动增减喷油泵的供油量,使柴油机能够以稳定的转速运行。 在柴油机上装设调速器是由柴油机的工作特性决定的。汽车柴油机的负荷经常变化,当负荷突然减小时,若不及时减少喷油泵的供油量,则柴油机的转速将迅速增高,甚至超出柴油机设计所允许的最高转速,这种现象称“超速”或“飞车”。相反,当负荷骤然增大时,若不及时增加喷油泵的供油量,则柴油机的转速将急速下降直至熄火。柴油机超速或怠速不稳,往往出自于偶然的原因,汽车驾驶员难于作出响应。这时,惟有借助调速器,及时调节喷油泵的供油量,才能 汽车柴油机调速器按其工作原理的不同,可分为机械式、气动式、液压式、机械气动复合式、机械液压复合式和电子式等多种形式。但目前应用最广的当属机械式调速器,其结构简单,工作可靠,性能良好。 按调速器起作用的转速范围不同,又可分为两极式调速器和全程式调速器。中、小型汽车柴油机多数采用两极式调速器,以起到防止超速和稳定怠速的作用。在重型汽车上则多采用全程式调速器,这种调速器除具有两极式调速器的功能外,还能对柴油机工作转速范围内的任何转速起 二、两极式调速器 两极式调速器只在柴油机的最高转速和怠速起自动调节作用,而在最高转速和怠速之间的其他任何转速,调速器不起调节作用。 (一)RQ 通常调速器由感应元件、传动元件和附加装置三部分构成。感应元件用来感知柴油机转速的变化,并发出相应的信号。传动元件则根据此信号进行供油量的调节。
(二)RQ型调速器基本工作原理 1)起动 将调速手柄从停车挡块移至最高速挡块上。在此过程中,调速手柄带动摇杆,摇杆带动滑块,使调速杠杆以其下端的铰接点为支点向右摆动,并推动喷油泵供油量调节齿杆克服供油量限制弹性挡块的阻力,向右移到起动油量的位置。起动油量多于全负荷油量,旨在加浓混合气,以利柴油机低温起动。 2)怠速 柴油机起动之后,将调速手柄置于怠速位置。这时调速手柄通过摇杆、滑块使调速杠杆仍以其下端的铰接点支点向左摆动,并拉动供油量调节齿杆7左移至怠速油量的位置。怠速时柴油机转速很低,飞锤的离心力较小,只能与怠速弹簧力相平衡,飞锤处于内弹簧座与安装飞锤的轴套
调速器的工作原理 液压调速器在感应元件和油量调节机构之间加入一个液压放大元件(液压伺服器),使感应元件的输出信号通过放大元件再传到油量调节机构上去,因此也叫间接作用式调速器。液压放大元件有放大兼执行作用,主要由控制和执行两个部分组成。一、无反馈的液压调速器其工作原理如下:当负荷减小时,由曲轴带动的驱动轴转速升高,飞球的离心力增加,推动速度杆右移。于是,摇杆以A点为中心逆时针转动,滑阀右移,压力油进入伺服器油缸的右部空间。与此同时,油缸的左部空间通过油孔与低压油路相通,其中的油被泄放。在压差的作用下,伺服活塞带动喷油泵齿条左移,以减少供油量。当转速恢复到原来数值时,滑阀也回到中央位置,调节过程结束。当负荷增加,转速降低时,调速过程按相反方向进行。从上述分析可知,调速器飞球所产生的离心力仅用来推动滑阀,因而飞球的重量尺寸就可以做得较小。而作为放大器的液压伺服器的作用力,则可根据需要,选择不同尺寸的伺服活塞和不同滑油压力予以放大。但是,在这种调速器中,因为感应元件直接驱动滑阀,无论它朝哪个方向往动,均难准确地回到原来位置而关闭油孔。这样就使柴油机转速不稳定,而产生严重的波动。为了使调速器能稳定调节,在调速器中还要加入一个装置,其作用是在伺服活塞移动的同时对滑阀产生一个反作用,使其向平衡的位置方向移动,减少柴油机转速波动的可能性。这种装置称为反馈机构。二、具有刚性反馈机构的液压调速器它的构造与上述无反馈液压调速器基本相同,只有杠杆义AC的上端A不是装在固定的铰链上,而是与伺服活塞的活塞杆相连。这一改变使感应元件、液压放大元件和油量调节机构之间的关系发生如下的变化。当负荷减小时,发动机转速升高,飞球向外张开带动速度杆向右移动。此时伺服活塞尚未动作,因此反馈杠杆AC的上端点A暂时作为固定点,杠杆AC绕A反时针转动,带动滑阀向右移动,把控制孔打开,高压油便进入动力缸的右腔,左腔与低压油路相通。这样高压油便推动伺服活塞带动喷油调节杆向左移动,并按照新的负荷而减少燃油供给量。在伺服活塞左移的同时,杠杆AC绕C点向左摆动与B点相连接的滑阀也向左移动,从而使滑阀向相反的方向运动。这样在伺服活塞移动时能对滑阀运动产生了相反作用的杠杆装置称为刚性反馈系统。当调节过程终了时,滑阀回到了起始位置,把控制油孔关闭,切断通往伺服油缸的油路。这时伺服活塞就停止运动,喷油泵调节杆随之移动到一个新的平衡位置,发动机就在相应的新负荷下工作。因此,相应于发动机不同的负荷,调速器就具有不同的稳定转速。因为发动机负荷变化时需要改变供油量,所以A点位置随负荷而变。与滑阀相连接的B点在任何稳定工况下均应处于原来的位置,与负荷无关。这样C点的位置必须配合A点作相应的变动,因而导致了转速的变化。假如当负荷减小时,调速过程结束后,滑阀回到中间原来位置时,伺服活塞处于减少了供油量位置,使A点偏左,C点偏右,因C 点偏右,弹簧进一步受压,只有在稍高的转速下运转才能使飞球的离心力与弹簧压力平衡。这说明负荷减小时稳定运转后,柴油机的转速比原来稍有升高。同理,当负荷增加时,稳定运转后,柴油机的转速比原来稍有降低。具有刚性反馈的液压调速器,可以保证调速过程具有稳定的工作特性,但负荷改变后,柴油机转速发生变化,稳定调速率d不能为零。如果要求负荷变化时即要调速过程稳定,又能保持发动机转速恒定不变(即入就必须采用另一种带有弹性反馈系统的液压调运器。三、具有弹性反馈的液压调速器它实际上是在"刚性反馈"装置中加入一个弹性环节--缓冲器和弹簧。弹簧的一端同固定的支点相连,而另一端则与缓冲器的活塞相连。缓冲器的油缸同伺服器的活塞成刚体联接。当发动机负荷减小时,转速增大,飞球的离心力增加。同样,滑阀右移,而伺服活塞则左移,减少喷油泵的供油量。当活塞的运动速度很高时,缓冲器和缓冲活塞就象一个刚体一样地运动。随着伺服活塞5的左移,缓冲器和AC杠杆上的A点也向左移动。这一过程和上述刚性反馈系统的调速器完全相同。但当调速过程接近终了时,滑阀已回到原来的位置,遮住了通往伺服油缸的
高压电机 高压电机是指额定电压在1000V以上电动机.常使用用的是6000V和10000V电压,由于国外的电网不同,也有3300V和6600V的电压等级。高压电机产生是由于电机功率与电压和电流的乘积成正比,因此低压电机功率增大到一定程度(如300KW/ 380V)电流受到导线的允许承受能力的限制就难以做大,或成本过高.需要通过提高电压实现大功率输出. 高压电机优点是功率大,承受冲击能力强;缺点是惯性大,启动和制动都困难. 高压电机的用途:高压电动机可用于驱动各种不同机械之用。如压缩机、水泵、破碎机、切削机床、运输机械及其它设备,供矿山、机械工业、石油化工工业、发电机等各种工业中作原动机用。用以传动鼓风机、磨煤机、轧钢机、卷扬机的电动机应在订货时注明用途及技术要求,采用特殊的设计以保障可靠运行。 高压电机控制装置根据实际而定方式:电机容量大大小于电源容量且1000KW以下的可直接启动,这时的冲击电流是额定值的3-6倍.为了防止冲击电流过大,对于大电机必须考虑减少启动电流的启动方式:有串电抗启动,变频启动,液力偶合器启动等多 种方式.有复杂有简单,价钱差异很大. 由于电压高,电流冲击大,电机制造必须满足过 电压的要求,绝缘等级要求较高。 高压电机维修工艺流程 一.绕线 高压电机按电压等级需要选用双亚胺,单亚胺,单薄双丝等各种规格的丝包扁线,材料齐备后,可在绕线机上绕制制成梭型成圈,一般电机最短线圈直线部分25厘米,最大线圈直线部分1.2米,绕制可单平绕,单立绕,也可双平换位绕,也可双平换位立绕,根据具体要求确定。利用圆盘中的万能调节也可绕制圆漆包线线圈。绕线机内置一台调速电机与一台涡轮涡杆减速机,带动绕线机实现0-120转/分的可顺逆可制动的旋转,并可正反计数,一般可绕制1600KW以内的各种电机线圈,另配有简易涨紧器一套,可控制绕制线圈的松紧度,一般的修理厂家选用如上产品即可,如遇到特殊大型规格时,可选择特异型绕制设备。 二.成型前包扎 高压电机梭型线圈绕制后,用收缩带,黄蜡绸带等绝缘材料包扎,目的是:保护线圈外绝缘、层间绝缘、匝间绝缘不至于损坏。在拉型机时免受模具夹具、鼻端销钉等摩擦,防止松动变形。 包扎线圈一般用女工,由于女工心细手巧且干活速度快,一般3-5人包扎供拉型。也可使用电动包带机. 三.成型 成型机、涨型机、拉型机其实是一种机器,它主要目的是把绕线机绕制的立绕梭型线圈或平绕梭型线圈拉成框行线圈,框型线圈以电机定子铁心的内外圆为标准,组成向心式的有角度的线圈,绕制梭型线圈需技工2人即可完成,而拉(涨)型一般需3人。过去在没有成型机以前,我处有几位老练的师傅可手拉成型,可在15分钟将72只线圈手工拉制成型,但对于较大型线圈拉型显现的有些吃力。而利用拉型机一般一
定子调压调速系统原理 及应用 SANY GROUP system office room 【SANYUA16H-
定子调压调速系统原理及应用 1.1工作原理 定子调压调速控制器是把两种传统的调速方式有机地结合起来用于控制三相交流绕线电机: ?1~3档时通过控制定子回路晶闸管导通角来改变电动机定子电压; ?4档时通过改变电动机转子电阻,改变电动机的机械特性。 两种调速方式的结合产生了非常好的控制效果,两种方式的优点得到了充分的发挥。 1.1.1 控制原理 定子调压调速控制器闭环控制的原理见图1-1,图中Ag为主令给定,F/V 为频率电压变换,I/V为电流电压变换,MCU为单片机,AT为触发器。 、V、 不同系列的控制器运行方式基本相同,只是在细节上有所不同。因此下面就介绍其运行方式。
1.1.2上升运行 ●重载 主令置上升某档速度时,上升接触器先接通,电机得电建立力矩,随后制动器打开,电机启动,系统进入闭环控制状态。此后只要主令置于上升调速档,通过主令的速度给定和速度反馈,系统都能很快使电机达到设定的速度。主令置全速档时,系统进入开环状态,晶闸管全导通,电机平稳加速,当速度大于50%和75%时,分别切除两级转子电阻,使速度到达全速。 当主令回到调速档时,两级转子电阻同时接入,系统重新进入闭环控制。 由于负载本身很重,此时电机转矩小于负载转矩,电机迅速减至设定速 度,并稳定运行。当主令回到零位时,无论电机处于何种速度,制动器都立即制动。制动器从开始动作到真正闭合需要一定的时间(液压抱闸一般在500ms左右),因此控制器延时一段时间再令电机断电。 ●轻载 由于负载轻,因此减速和制动的运行状况和重载不同。当主令从全速档回到调速档时,由于负载本身很轻(尤其是空钩时),电机转矩只是略小于负载转矩,因此减速时间很长,减到调速档一般需要数秒时间。当主令回到零位时,和重载一样,制动器立即闭合。 1.1.3下降运行 ●重载 当主令置下降调速档时,也是上升接触器先接通。此时电机输出的是反向转矩,小于负载转矩,因此电机处于倒拉反转状态。和上升相同,系统也是处于闭环控制状态,只要主令置于下降调速档,通过主令的速度给定和
可控硅在单相电机中的调速电路 发布时间:2009-12-09 09:44 本文介绍一种简易电机调速电路,不用机械齿轮转化来变速,改善了机械设备使用的效率。 此简易电子调速电路适用于220V市电的单相电动机,电机额定电流在6.5A以内,功率在1kW左右,适用于家庭电风扇、吊扇电机及其它单相电机,若电路加以修改,则可作调光、电磁振动调压、电风扇温度自动变速器等用途。其电路如图1所示。 硅二极管VD1~VD4构成一个桥式全波整流电路,电桥与电机串联在电路中,电桥对可控硅VS提供全波整流电压。当VS接通时,电桥呈现本电机串联的低阻电路。当图1中A点为负半周时,电流经电机、VD1、VS、R1、VD3构成回路,当B 点为正半周时电流经VD2、VS、R1、VD4、电机M构成回路,电机端得到的是交变电流。电机两端的电压大小主要决定于可控硅VS的导通程度,只要改变可控硅的导通角,就可以改变VS的压降,电机两端的电压也变化,达到调压调速的目的,电机端电压Um=U1-UVD1-Uvs-UR1-UVD3,上式中,UVD1、UVD3的压降均很小,而反馈UR1也不大,故电机端电压就简化为Um=U1-Uvs。
可控硅VS的触发脉冲靠一只简单的单结晶体管VS电路产生,电容器C2通过电阻R4、R5充电到稳压管DW的稳定电压UZ,当C2充电到单结晶体管的峰点电压时,单结晶体管就触发,输出脉冲而使可控硅导通。在单结晶体管发射极电压充分衰减后,单结晶体管就断开,VS一经接通,那么a、b两点之间的电压就下降到稳压管DW的稳定电压UZ以下,电容器C2再充电就依赖于点a到b点间的电压,因稳压管的电压已经降低到它的导通区域以外,点a到b点的电压取决于电动机的电流、R1和VS导通时的电压降。这样,当VS导通时,电容器C2的充电电流取决于电动机的电流,在这种情况下便得到了反馈,这就使得电动机在低速时转矩所受损失的问题得到补救。 反馈电阻R1的数值经过实验得出,因此,VS在导通周期的时间内,电容 C2便不能充电到足以再对单结晶体管触发的高压,然而,电容C2会充电到电动机电流所决定的某一数值。如果在某一导通周期电动机的电流增加,则C2上的电压也增加,故在下一周期开始时,C2就不需那么长的时间才能充电到单晶体的峰点电压。这种情况下,触发角就被减少了(导通角更大),加到电机上的方根电压就成比例增加,致使有效转矩增加。二极管VD5和电容器C1防止在导通期中由于触发单结晶体所造成的反馈,反馈电阻R1的取值具体如附表所示。 R2为限流电阻,它应保证稳定DW1在稳压范围,稳定电流在10~20mA左右,它并保证了脉冲移相角,当R2增大,移相角减小,电机两端的电压调节范围减少。 R4应保证电机两端电压的上限值,当R4增大时,输出到电机的电压上限下降。
说明PWM调速系统的工作原理
说明PWM调速系统的工作原理 脉冲宽度调制脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。 脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。 多数负载(无论是电感性负载还是电容性负载)
需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。 许多微控制器内部都包含有PWM控制器。例如,Microchip公司的PIC16C67内含两个PWM 控制器,每一个都可以选择接通时间和周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM操作之前,这种微处理器要求在软件中完成以下工作: * 设置提供调制方波的片上定时器/计数器的周期 * 在PWM控制寄存器中设置接通时间 * 设置PWM输出的方向,这个输出是一个通用I/O管脚 * 启动定时器 * 使能PWM控制器 PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将
定子调压调速系统原理及应用 工作原理 定子调压调速控制器是把两种传统的调速方式有机地结合起来用于控制三相交流绕线电机: 1~3档时通过控制定子回路晶闸管导通角来改变电动机定子电压; 4档时通过改变电动机转子电阻,改变电动机的机械特性。 两种调速方式的结合产生了非常好的控制效果,两种方式的优点得到了充分的发挥。 1.1.1 控制原理 定子调压调速控制器闭环控制的原理见图1-1,图中Ag为主令给定,F/V 为频率电压变换,I/V为电流电压变换,MCU为单片机,AT为触发器。 I/V Ag MCU AT F/V 图1-1 来自Ag、I/V、F/V的信号经过MCU处理通过AT形成触发脉冲控制晶闸管的导通角,达到控制电机定子电压,从而控制电机转矩的目的,也即实现对电机转速的控制。 控制器的晶闸管单元有五组反并联的晶闸管模块U、V、W、A、B。U、V、W 导通时,电机输出正向转矩;A、B、W导通时,电机输出反向转矩。司机通过主
令控制器给定电机转速,由速度反馈实现闭环控制。 不同系列的控制器运行方式基本相同,只是在细节上有所不同。因此下面就介绍其运行方式。 上升运行 重载 主令置上升某档速度时,上升接触器先接通,电机得电建立力矩,随后制动器打开,电机启动,系统进入闭环控制状态。此后只要主令置于上升调速档,通过主令的速度给定和速度反馈,系统都能很快使电机达到设定的速度。主令置全速档时,系统进入开环状态,晶闸管全导通,电机平稳加速,当速度大于50%和75%时,分别切除两级转子电阻,使速度到达全速。当主令回到调速档时,两级转子电阻同时接入,系统重新进入闭环控制。由于负载本身很重,此时电机转矩小于负载转矩,电机迅速减至设定速度,并稳定运行。 当主令回到零位时,无论电机处于何种速度,制动器都立即制动。制动器从开始动作到真正闭合需要一定的时间(液压抱闸一般在500ms左右),因此控制器延时一段时间再令电机断电。 轻载 由于负载轻,因此减速和制动的运行状况和重载不同。当主令从全速档回到调速档时,由于负载本身很轻(尤其是空钩时),电机转矩只是略小于负载转矩,因此减速时间很长,减到调速档一般需要数秒时间。当主令回到零位时,和重载一样,制动器立即闭合。 下降运行 重载 当主令置下降调速档时,也是上升接触器先接通。此时电机输出的是反向转矩,小于负载转矩,因此电机处于倒拉反转状态。和上升相同,系统也是处于闭环控制状态,只要主令置于下降调速档,通过主令的速度给定和速度反馈,系统都能很快使电机达到设定的速度。当主令置全速档时,上升接触器断开,下降接触器接通,系统进入开环状态,电机迅速加速,当速度大于
调速器原理: 调速的方法不外乎通过3种途径:改变电压;电流;频率. 调速控制的方式也就是通过负反馈来调整.大的来说分为开环,半闭环控制和闭环控制.开环就是设定参数后不会有任何修正的. 半闭环: 比如你用调电压的方式来调速,那么通过传感器检测电压是否调整到位,并给以负反馈. 闭环则是无论你用什么方式改变转速,都通过传感器检测转速提供负反馈,作用于调速的要素.闭环控制最为精确. 目前有三种调速器,较老式的叫电抗器,实际上是带抽头的自耦变压器(一般自耦变压器不带抽头),可以改变不同的电压,风扇就有了不同的转速,另一种是电子调速器,是使用可控硅加电位器改变电压,属于无级调速,再有一种就是变频器,它不调整电压,而是改变交流电的频率,也达到了调速的目的,因为电风扇基本上采用交流异步电动机,因此改变频率即可调速。 一、变极对数调速方法这种调速方法是用改变定子绕组的接红方式来改变笼型电动机定子极对数达到调速目的,特点如下:l 具有较硬的机械特性,稳定性良好;l 无转差损耗,效率高;l 接线简单、控制方便、价格低;l 有级调速,级差较大,不能获得平滑调速;l 可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。l 本方法适用于不需要无级调速的生产机械,如金属切削机床、升降机、起重设备、风机、水泵等。 二、变频调速方法变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。变频调速系统主要设备是提供变频电源的变频器,变频器可分成交流-直流-交流变频器和交流-交流变频器两大类,目前国内大都使用交-直-交变频器。其特点:l 效率高,调速过程中没有附加损耗;l 应用范围广,可用于笼型异步电动机;l 调速范围大,特性硬,精度高;l 技术复杂,造价高,维护检修困难。l 本方法适用于要求精度高、调速性能较好场合。 三、串级调速方法串级调速是指绕线式电动机转子回路中串入可调节的附加电势来改变电动机的转差,达到调速的目的。大部分转差功率被串入的附加电势所吸收,再利用产生附加的装置,把吸收的转差功率返回电网或转换能量加以利用。根据转差功率吸收利用方式,串级调速可分为电机串级调速、机械串级调速及晶闸管串级调速形式,多采用晶闸管串级调速,其特点为:l 可将调速过程中的转差损耗回馈到电网或生产机械上,效率较高;l 装置容量与调速范围成正比,投资省,适用于调速范围在额定转速70%-90%的生产机械上;l 调速装置故障时可以切换至全速运行,避免停产;l 晶闸管串级调速功率因数偏低,谐波影响较大。l 方法适合于风机、水泵及轧钢机、矿井提升机、挤压机上使用。
第一篇: 可控硅是一种新型的半导体器件,它具有体积小、重量轻、效率高、寿命长、动作快以及使用方便等优点,目前交流调压器多采用可控硅调压器。这里介绍一台电路简单、装置容易、控制方便的可控硅交流调压器,这可用作家用电器的调压装置,进行照明灯调光,电风扇调速、电熨斗调温等控制。这台调压器的输出功率达100W,一般家用电器都能使用。 1:电路原理:电路图如下 可控硅交流调压器由可控整流电路和触发电路两部分组成,其电路原里图如下图所示。从图中可知,二极管D1—D4组成桥式整流电路,双基极二极管T1构成张弛振荡器作为可控硅的同步触发电路。当调压器接上市电后,220V交流电通过负载电阻RL经二极管D1—D4整流,在可控硅SCR的A、K两端形成一个脉动直流电压,该电压由电阻R1降压后作为触发电路的直流电源。在交流电的正半周时,整流电压通过R4、W1对电容C充电。当充电电压Uc达到T1管的峰值电压Up时,T1管由截止变为导通,于是电容C通过T1管的e、b1结和R2迅速放电,结果在R2上获得一个尖脉冲。这个脉冲作为控制信号送到可控硅SCR的控制极,使可控硅导通。可控硅导通后的管压降很低,一般小于1V,所以张弛振荡器停止工作。当交流电通过零点时,可控硅自关断。当交流电在负半周时,电容C又从新充电……如此周而复始,便可调整负载RL上的功率了。 2:元器件选择 调压器的调节电位器选用阻值为470KΩ的WH114-1型合成碳膜电位器,这种电位器可以直接焊在电路板上,电阻除R1要用功率为1W的金属膜电阻外,其佘的都用功率为1/8W的碳膜电阻。D1—D4选用反向击穿电压大于300V、最大整流电流大于0.3A的硅整流二极管,如2CZ21B、2CZ83E、2DP3B等。SCR选用正向与反向电压大于300V、额定平均电流大于1A的可控硅整流器件,如国产3CT系例。 第二篇: 本例介绍的温度控制器,具有SB260取材方便、性能可靠等特点,可用于种子催芽、食用菌培养、幼畜饲养及禽蛋卵化等方面的温度控制,也可用于控制电热毯、小功率电暖器等家用电器。
绕线电机的串电阻调速与定子调压调速在起重机 上的应用与比较 摘要 本篇论文主要讲述了交流异步电动机在起重机上的两种调速方式:转子串电阻调速和定子调压调速。介绍了两种方式在启动、调速的工作特性、工作原理和工作过程,以及两种方式的优缺点,着重说明了定子调压调速方式在起重机上的应用。 关键词 调速、转子串电阻、定子调压调速 调速:根据生产工艺要求改变电力拖动系统的运行速度称为调速。 起动:从转子静止 S = 1时开始,加速到某一转速稳定运行的过度过程。启动结束后电动机将以额定转速稳定运行。 在起重机的运行中,经常采用的是绕线式异步电动机,它经常采用两种调速方式:转子串电阻调速、定子调压调速。
Series resistance of the motor winding speed and the stator voltage regulating speed control in the application on the crane abstract This paper mainly tells the story of ac asynchronous motor in the two kinds of speed regulation on the crane: rotor speed and stator resistance voltage regulating speed. Introduces two ways of job at the start, speed characteristics ,working principle and process, as well as the advantages and disadvantages of two ways, focusing on the application of crane. Keywords: Control of motor speed, Rotor resistance, The stator voltage regulating speed,
直流电动机的PWM调压调速原理 直流电动机转速N的表达式为:N=U-IR/Kφ 由上式可得,直流电动机的转速控制方法可分为两类:调节励磁磁通的励磁控制方法和调节电枢电压的电枢控制方法。其中励磁控制方法在低速时受磁极饱和的限制,在高速时受换向火花和换向器结构强度的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用得很少。现在,大多数应用场合都使用电枢控制方法。 对电动机的驱动离不开半导体功率器件。在对直流电动机电枢电压的控制和驱动中,对半导体器件的使用上又可分为两种方式:线性放大驱动方式和开关驱动方式。 线性放大驱动方式是使半导体功率器件工作在线性区。这种方式的优点是:控制原理简单,输出波动小,线性好,对邻近电路干扰小;但是功率器件在线性区工作时由于产生热量会消耗大部分电功率,效率和散热问题严重,因此这种方式只用于微小功率直流电动机的驱动。绝大多数直流电动机采用开关驱动方式。开关驱动方式是使半导体器件工作在开关状态,通过脉宽调制PWM 来控制电动机电枢电压,实现调速。 在PWM调速时,占空比α是一个重要参数。以下3种方法都可以改变占空比的值。 (1)定宽调频法 这种方法是保持t1不变,只改变t2,这样使周期T(或频率)也随之改变。 (2)调频调宽法 这种方法是保持t2不变,只改变t1,这样使周期T(或频率)也随之改变。 (3)定频调宽法 这种方法是使周期T(或频率)保持不变,而同时改变t1和t2。 前两种方法由于在调速时改变了控制脉冲的周期(或频率),当控制脉冲的频率与系统的固有频率接近时,将会引起振荡,因此这两种方法用得很少。目前,在直流电动机的控制中,主要使用定频调宽法。 直流电动机双极性驱动可逆PWM控制系统 双极性驱动则是指在一个PWM周期里,作为在电枢两端的脉冲电压是正负交替的。 双极性驱动电路有两种,一种称为T型,它由两个开关管组成,采用正负电源,相当于两个不可逆控制系统的组合。但由于T型双极性驱动中的开关管要承受较高的反向电压,因此只用在低压小功率直流电动机驱动。 另一种称为H型。 H型双极性驱动 一、显示接口模块 方案一:液晶显示器也是一种常用的显示器件。它的优点是功耗低,寿命长,本身无老化问题,显示信息量大(可以显示字母和数字),在显示字符上没有限制。但价格高,接口电路较为复杂。其只在一些(袖珍型)设备上作为显示之用。
定子调压调速系统原理及应用 1.1工作原理 定子调压调速控制器是把两种传统的调速方式有机地结合起来用于控制三相交流绕线电机: ?1~3档时通过控制定子回路晶闸管导通角来改变电动机定子电压; ?4档时通过改变电动机转子电阻,改变电动机的机械特性。 两种调速方式的结合产生了非常好的控制效果,两种方式的优点得到了充分的发挥。 1.1.1 控制原理 定子调压调速控制器闭环控制的原理见图1-1,图中Ag为主令给定,F/V 为频率电压变换,I/V为电流电压变换,MCU为单片机,AT为触发器。 来自Ag、I/V、F/V的信号经过MCU处理通过AT形成触发脉冲控制晶闸管的导通角,达到控制电机定子电压,从而控制电机转矩的目的,也即实现对电机转速的控制。 控制器的晶闸管单元有五组反并联的晶闸管模块U、V、W、A、B。U、V、W导通时,电机输出正向转矩;A、B、W导通时,电机输出反向转矩。司机通
过主令控制器给定电机转速,由速度反馈实现闭环控制。 不同系列的控制器运行方式基本相同,只是在细节上有所不同。因此下面就介绍其运行方式。 1.1.2上升运行 ●重载 主令置上升某档速度时,上升接触器先接通,电机得电建立力矩,随后制动器打开,电机启动,系统进入闭环控制状态。此后只要主令置于上升调速档,通过主令的速度给定和速度反馈,系统都能很快使电机达到设定的速度。主令置全速档时,系统进入开环状态,晶闸管全导通,电机平稳加速,当速度大于50%和75%时,分别切除两级转子电阻,使速度到达全速。当主令回到调速档时,两级转子电阻同时接入,系统重新进入闭环控制。由于负载本身很重,此时电机转矩小于负载转矩,电机迅速减至设定速度,并稳定运行。 当主令回到零位时,无论电机处于何种速度,制动器都立即制动。制动器从开始动作到真正闭合需要一定的时间(液压抱闸一般在500ms左右),因此控制器延时一段时间再令电机断电。 ●轻载 由于负载轻,因此减速和制动的运行状况和重载不同。当主令从全速档回到调速档时,由于负载本身很轻(尤其是空钩时),电机转矩只是略小于负载转矩,因此减速时间很长,减到调速档一般需要数秒时间。当主令回到零位时,和重载一样,制动器立即闭合。 1.1.3下降运行 ●重载 当主令置下降调速档时,也是上升接触器先接通。此时电机输出的是反向转矩,小于负载转矩,因此电机处于倒拉反转状态。和上升相同,系统也是处于闭环控制状态,只要主令置于下降调速档,通过主令的速度给定和速度反馈,系统都能很快使电机达到设定的速度。当主令置全速档时,上升接触器断开,下降接触器接通,系统进入开环状态,电机迅速加速,当速度大于
华侨大学 电气工程及其自动化课程设计 题目:异步电动机调压调速MATLAB仿真班级:电气C班 学号:0915331063 学生姓名:朱少斌 指导教师:黄老师 2013年5月4号
一、设计任务 1、了解并熟悉双闭环三相异步电机调压调速原理及组成。 2、学习 SIMULINK,熟悉相关的模块功能。 3、进一步理解交流调压系统中电流环和转速环的作用。 二、设计要求 1、利用SIMULINK建立闭环调速系统仿真模型。 2、调试完成调压模块仿真、开环系统仿真、闭环系统仿真。 三、实验设备 1、计算机一台 2、MATLAB仿真软件 四、实验原理 调压调速即通过调节通入异步电动机的三相交流电压大小来调节转子转速的方法。理论依据来自异步电动机的机械特性方程式: 其中,p为电机的极对数; w1为定子电源角速度; U1为定子电源相电压; R2’为折算到定子侧的每相转子电阻; R1为每相定子电阻; L11为每相定子漏感; L12为折算到定子侧的每相转子漏感; S为转差率。
图1 异步电动机在不同电压的机械特性 由电机原理可知,当转差率s 基本保持不变时,电动机的电磁转矩与定子电压的平方成正比。因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的。 1、调压电路 改变加在定子上的电压是通过交流调压器实现的。目前广泛采用的交流调压器由晶闸管等器件组成。它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压。这里采用三相全波星型联接的调压电路。 图2 调压电路原理图 Ua Ub Uc T2 T3 T5 T4 T6 R R R N T1
6.1 交流调压电路 交流调压电路采用两单向晶闸管反并联(图6-1(a))或双向晶闸(图6-1(b)),实现对交流电正、负半周的对称控制,达到方便地调节输出交流电压大小的目的,或实现交流电路的通、断控制。因此交流调压电路可用于异步电动机的调压调速、恒流软起动,交流负载的功率调节,灯光调节,供电系统无功调节,用作交流无触点开关、固态继电器等,应用领域十分广泛。 图6-1 交流调压电路 交流调压电路一般有三种控制方式,其原理如图6-2所示。 图6-2 交流调压电路控制方式 (1)通断控制 通断控制是在交流电压过零时刻导通或关断晶闸管,使负载电路与交流电源接通几个周波,然后再断开几个周波,通过改变导通周波数与关断周波数的比值,实现调节交流电压大小的目的。 通断控制时输出电压波形基本正弦,无低次谐波,但由于输出电压时有时无,电压调节不连续,会分解出分数次谐波。如用于异步电机调压调速,会因电机经常处于重合闸过程而出现大电流冲击,因此很少采用。一般用于电炉调温等交流功率调节的场合。 (2)相位控制 与可控整流的移相触发控制相似,在交流的正半周时触发导通正向晶闸管、负半周时触发导通反向晶闸管,且保持两晶闸的移相角相同,以保证向负载输出正、负半周对称的交流电压波形。 相位控制方法简单,能连续调节输出电压大小。但输出电压波形非正弦,含有
丰富的低次谐波,在异步电机调压调速应用中会引起附加谐波损耗,产生脉动转矩等。 (3)斩波控制 斩波控制利用脉宽调制技术将交流电压波形分割成脉冲列,改变脉冲的占空比即可调节输出电压大小。 斩波控制输出电压大小可连续调节,谐波含量小,基本上克服了相位及通断控制的缺点。由于实现斩波控制的调压电路半周内需要实现较高频率的通、断,不能采用晶闸管,须采用高频自关断器件,如GTR、GTO、MOSFET、IGBT等。 实际应用中,采取相位控制的晶闸管型交流调压电路应用最广,本章将分别讨论单相及三相交流调压电路。 6.1.1 单相交流调压电路 单相交流调压电路原理图如图6-1所示,其工作情况与负载性质密切相关。 1.电阻性负载 纯电阻负载时交流调压电路输出电压、输出电流波形如图6-3所示。电路 工作过程是:在电源电压正半周、移相控制角时刻,触发导通晶闸管VT1,使正半周的交流电压施加到负载电阻上,电流、电压波形相同。当电压过零时,VT1 因电流为零而关断。在控制角为时触发导通VT2,负半周交流电压施加在负载上,当电压再次过零时,VT2因电流为零而关断,完成一个周波的对称输出。 当时,输出电压最大;当时。改变控制角大小可获得大小可调的交流电压输出,其波形为“缺块”正弦波。正因为电压波形有缺损,