(VR虚拟现实)虚拟仪器仪表综合实验装置实验指导书
1
实验一温度传感器实验
一、实验目的
掌握温度传感器的特性、工作原理及其应用。
二、实验原理
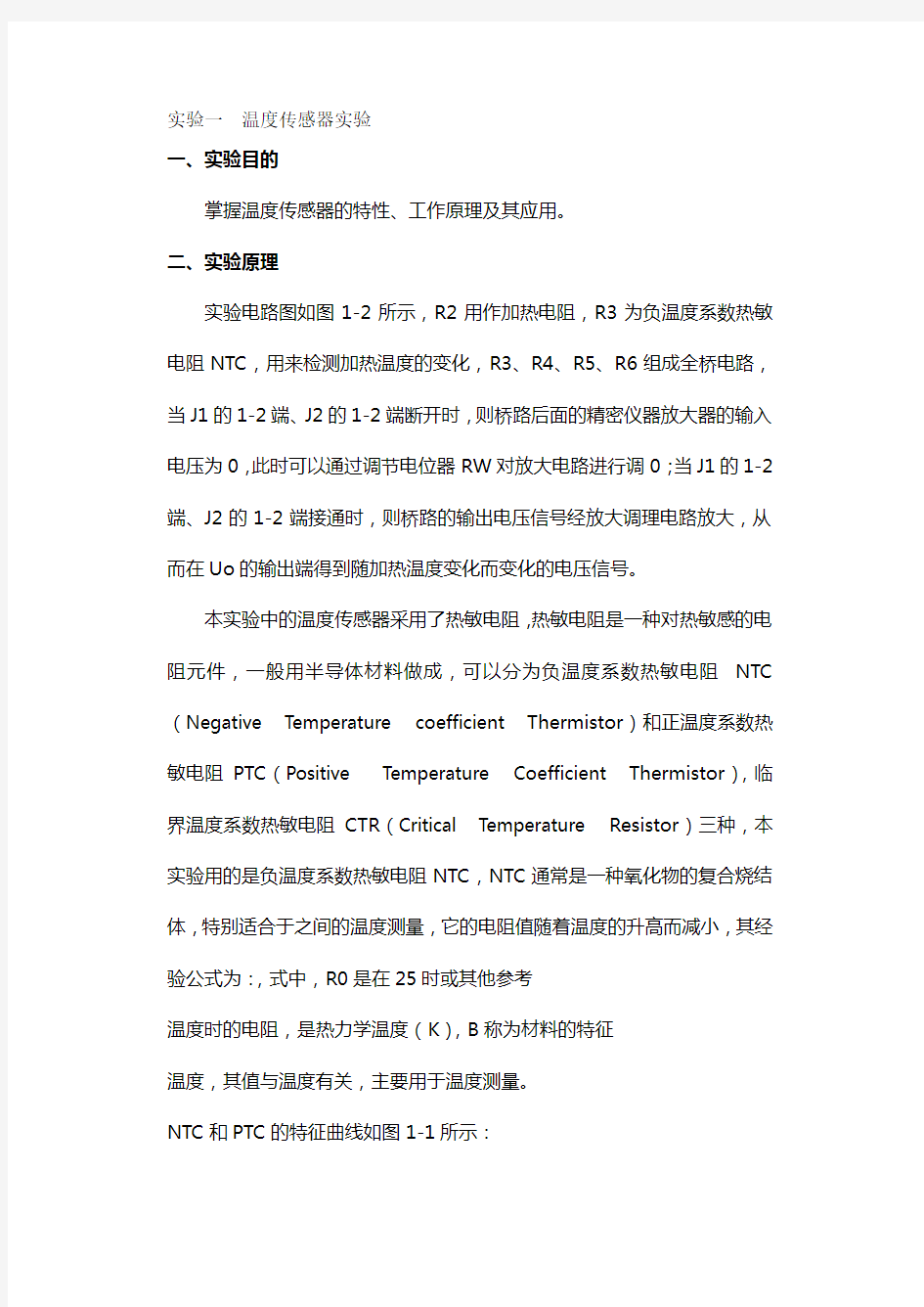
实验电路图如图1-2所示,R2用作加热电阻,R3为负温度系数热敏电阻NTC,用来检测加热温度的变化,R3、R4、R5、R6组成全桥电路,当J1的1-2端、J2的1-2端断开时,则桥路后面的精密仪器放大器的输入电压为0,此时可以通过调节电位器RW对放大电路进行调0;当J1的1-2端、J2的1-2端接通时,则桥路的输出电压信号经放大调理电路放大,从而在Uo的输出端得到随加热温度变化而变化的电压信号。
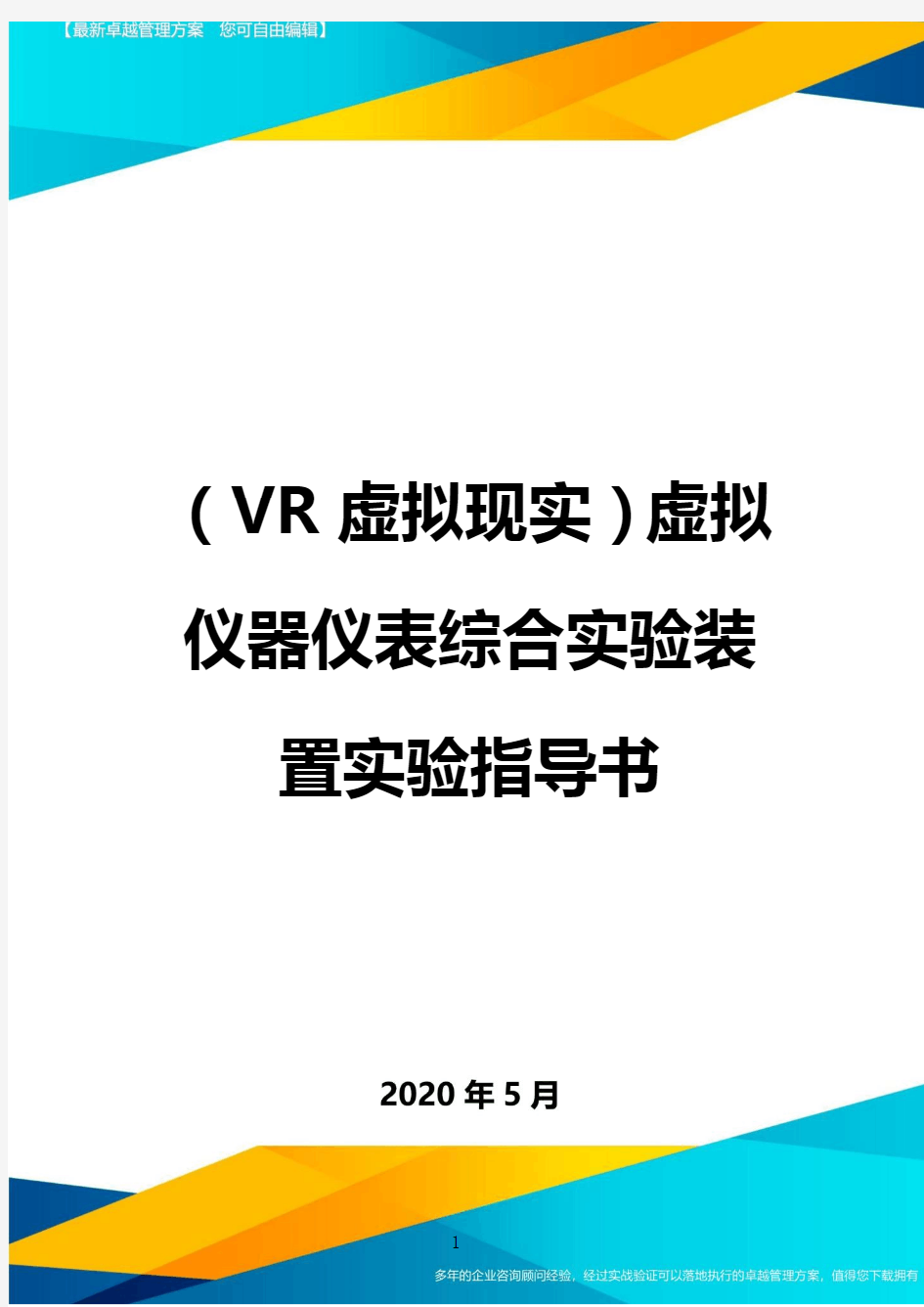
本实验中的温度传感器采用了热敏电阻,热敏电阻是一种对热敏感的电阻元件,一般用半导体材料做成,可以分为负温度系数热敏电阻NTC (Negative Temperature coefficient Thermistor)和正温度系数热敏电阻PTC(Positive Temperature Coefficient Thermistor),临界温度系数热敏电阻CTR(Critical Temperature Resistor)三种,本实验用的是负温度系数热敏电阻NTC,NTC通常是一种氧化物的复合烧结体,特别适合于之间的温度测量,它的电阻值随着温度的升高而减小,其经验公式为:,式中,R0是在25时或其他参考
温度时的电阻,是热力学温度(K),B称为材料的特征
温度,其值与温度有关,主要用于温度测量。
NTC和PTC的特征曲线如图1-1所示:
图1-1
图1-2
三、实验设备
万用表、温度传感器调理模块。
四、实验内容与步骤
1.将“温度传感器调理模块”插放到相应的实验挂箱上;
2. 在确保上述模块插放无误后,从实验屏上接入实验挂箱所需的工作电源(电源的大小及正负极性不能接错);
3、进行调理电路的调零:先将“温度传感器调理模块”的拨动开关拨向下方(此时模块上的灯暗);用短路帽短接此模块上J1、J2下方的两个插脚,再调节电位器RW,用万用表测量的两端,使输出电压为零;再把短路帽切换到J1、J2上方的两个插脚。
4、调零完成之后,再把拨动开关拨向上方(模块上的灯亮),此时电阻R2处于加热状态,用万用表测量的两端,在加热过程中,观测并记录输出电压的变化情况。
五、思考题
归纳总结NTC用作温度测量时应注意哪些问题,主要应用在什么场合,有哪些优缺点。
六、实验报告要求
1、整理实验数据,分析热敏电阻NTC的阻值随温度变化的情况;
2、画出热敏电阻NTC的温度特征曲线。
实验二金属箔式应变片——单臂电桥性能实验一、实验目的
了解金属箔式应变片的应变效应,单臂电桥工作原理和性能。
二、实验原理
应变片的安装位置如图2-2所示,应变式传感器已装到应变传感器模块上。传感器中各电阻应变片已接入到“THVZ-1 型传感器实验箱”上,从左到右依次为R1、R2、R3、R4。可用万用表进行测量,R1=R2=R3=R4=350Ω。
图2-2 应变式传感器安装示意图
金属丝在外力作用下发生机械形变时,其电阻值会发生变化,这就是金属的电阻应变效应。
金属的电阻表达式为:
(1)当金属电阻丝受到轴向拉力F作用时,将伸长,横截面积相应减小,电阻率因晶格变化等因素的影响而改变,故引起电阻值变化。对式(1)全微分,并用相对变化量来表示,则有:
(2)
式中的为电阻丝的轴向应变,用表示,常用单位(1=1×)。若径向应
变为,电阻丝的纵向伸长和横向收缩的关系用泊松比表示为,因为=2(),则(2)式可以写成:
(3)
式(3)为“应变效应”的表达式。称金属电阻的灵敏系数,从式(3)可见,受两个因素影响,一个是(1+),它是材料的几何尺寸变化引起的,另一个是,是材料的电阻率随应变引起的(称“压阻效应”)。对于金属材料而言,以前者为主,则,对半导体,值主要是由电阻率相对变化所决定。实验也表明,在金属丝拉伸比例极限内,电阻相对变化与轴向应变成比例。通常金属丝的灵敏系数=2左右。
用应变片测量受力时,将应变片粘贴于被测对象表面上。在外力作用下,被测对象表面产生微小机械变形时,应变片敏感栅也随同变形,其电阻值发生相应变化。通过调理转换电路转换为相应的电压或电流的变化,根据(3)式,可以得到被测对象的应变值,而根据应力应变关系
(4)
式中σ——测试的应力;
E——材料弹性模量。
可以测得应力值σ。通过弹性敏感元件,将位移、力、力矩、加速度、压力等物理量转换为应变,因此可以用应变片测量上述各量,从而做成各种应变式传感器。电阻应变片可分为金属丝式应变片,金属箔式应变片,金属薄膜应变片。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位受力状态变化、电桥的作用完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态,对单臂电桥输出电压U= EKε/4,式中E为电桥供电电压,K为应变灵敏系数。
应变式传感器信号调理实验电路图如图2-1所示。
图2-1应变式传感器信号调理实验电路图
三、实验设备
THVZ-1型传感器实验箱中应变式传感器实验单元、砝码、万用表、信号调理挂箱、应变式传感器调理模块。
四、实验内容与步骤
1.将“应变式传感器调理模块”插放到相应的实验挂箱上,在确保上述模块插放无误后,从实验屏上接入实验挂箱所需的工作电源(电源的大小及正负极性不能接错)
2.检查无误后,合上主控台电源开关,进行差动放大器调零,方法为:将应变式传感器信号调理实验电路的输入端Ui与地短接,调节实验模板上调零电位器Rw2,使Uo端输出电压为零,(万用表2V档测量)。关闭主控台电源。(注意:当Rw2的位置一旦确定,就不能改变。)
3.按图2-3将应变式传感器的其中一个应变片R1(即模板的R1)接入电桥作为一个桥臂与R5、R6、R7接成直流电桥,(R5、R6、R7在模块内已接好),接好电桥调零电位器Rw1,接上桥路电源±5V,如图2-3所示。
检查接线无误后,合上主控箱电源开关,调节Rw1,使数显表显示约为零(万用表2V档测量)。
4.在砝码盘上放置一只砝码,读取数显表数值,以后每次增加一个砝码并读取相应的数显表值,直到200g砝码加完,记下实验结果填入表2-1,关闭电源。
表2-1单臂电桥输出电压与所加负载重量值
74107
L,d,d,,,d ,, , ,
图2-3 应变式传感器单臂电桥实验接线图
5.根据表1-1计算系统灵敏度(输出电压的变化量,重量变化量)和非线性误差δf1=Δm/y FS ×100%式中(多次测量时为平均值)为输出值与拟合直线的最大偏差:y FS 满量程输出平均值,此处为200g。
五、实验注意事项
1.不要在砝码盘上放置超过1kg的物体,否则容易损坏传感器。
2.电桥的电压为±5V,绝不可错接成±15V,否则可能烧毁应变片。
六、实验报告要求
1.记录实验数据,并绘制出单臂电桥时传感器的特性曲线。
2.从理论上分析产生非线性误差的原因。
实验三金属箔式应变片——半桥性能实验
一、实验目的
1.掌握半桥的工作原理。
2.比较半桥与单臂电桥的不同性能、了解其特点。
二、实验原理
把不同受力方向的两只应变片接入电桥作为邻边,电桥输出灵敏度提高,非线性得到改善。当应变片阻值和应变量相同时,其桥路输出电压U O2=U= EKε/2。
三、实验设备
传感器实验箱(二)中应变式传感器实验单元,传感器调理电路挂件中应变式传感器实验模板、砝码、智能直流电压表(或虚拟直流电压表)、±15V电源、±5V电源。
四、实验内容与步骤
1.接入模板电源±15V(从主控箱引入),检查无误后,合上主控台电源开关,进行差动放大器调零,方法为:将图2-1的输入端Ui两端均与地短接,调节实验模板上调零电位器Rw2,使Uo端输出电压为零,(万用表2V档测量)。关闭主控台电源。(注意:当Rw2的位置一旦确定,就不能改变。)
2.根据图3-1接线。R1、R2为实验模板上的应变片,注意R2应和R1受力状态相反,所标的箭头表示受力方向,即将传感器中两片受力相反
(一片受拉、一片受压)的电阻应变片作为电桥的相邻边。接入桥路电源±5V,调节电桥调零电位器Rw1进行桥路调零,重复实验二中的步骤
图3-1 应变式传感器半桥实验接线图
4、5,将实验数据记入表3-1,计算灵敏度,非线性误差。若实验时显示数值不变化说明R1与R2两应变片受力状态相同。则应更换应变片。
表3-1半桥测量时,输出电压与加负载重量值
重量(g)
电压(mV)
五、实验注意事项
1.不要在砝码盘上放置超过1kg的物体,否则容易损坏传感器。
2.电桥的电压为±5V,绝不可错接成±15V,否则可能烧毁应变片。六、思考题
1.半桥测量时两片不同受力状态的电阻应变片接入电桥时,应放在:(1)对边?(2)邻边?
2.桥路(差动电桥)测量时存在非线性误差,是因为:(1)电桥测量原理上存在非线性?(2)应变片应变效应是非线性的?(3)调零值不是真正为零?
七、实验报告要求
1.记录实验数据,并绘制出单臂电桥时传感器的特性曲线。
2.分析为什么半桥的输出灵敏度比单臂电桥时高了一倍,而且非线性误差也得到改善。
实验四金属箔式应变片——全桥性能实验
一、实验目的
掌握全桥测量电路的原理及优点。
二、实验原理
全桥测量电路中,将受力性质相同的两个应变片接入电桥对边,当应变片初始阻值:R1=R2=R3=R4,其变化值ΔR1=ΔR2=ΔR3=ΔR4时,其桥路输出电压U03=。其输出灵敏度比半桥又提高了一倍,非线性误差和温度误差均得到明显改善。
三、实验设备
THVZ-1型传感器实验箱中应变式传感器实验单元、砝码、万用表、信号调理挂箱、应变式传感器调理模块。
四、实验内容与步骤
1.根据4-1接线,实验方法与实验二相同。将实验结果填入表4-1;进行灵敏度和非线性误差计算。
表4-1全桥输出电压与加负载重量值
图4-1 应变式传感器全桥实验接线图
实验注意事项
1.不要在砝码盘上放置超过1kg的物体,否则容易损坏传感器。
2.电桥的电压为±5V,绝不可错接成±15V。
七、实验报告要求:
1.根据所记录的数据绘制出全桥时传感器的特性曲线。
2.比较单臂、全桥输出时的灵敏度和非线性度,并从理论上加以分析比较,得出相应的结论。
实验五电容式传感器的位移特性实验
一、实验目的
了解电容式传感器的结构及其特点。
二、实验原理
平板电容器电容C=,它的三个参数、S、d中,保持两个参数不变,只改变其中一个参数,则可用于测量谷物干燥度(变)、测微小位移(变d)和测量液位(变S)等多种电容传感器。变面积型电容传感器中,平板结构对极距特别敏感,测量精度受到影响。圆柱形结构受极板径向变化的影响很小,且理论上具有很好的线性关系(但实际由于边缘效应的影响,会引起极板间的电场分布不均,非线性问题仍然存在,且灵敏度下降,但比变极距型好得多。)成为实际中最常用的结构,其中线位移单组式的电容量C在忽略
边缘效应时为:
(1)
式中——外圆筒与内圆柱覆盖部分的长度;
——外圆筒内半径和内圆柱外半径。
当两圆筒相对移动时,电容变化量为:
(2)
于是,可得其静态灵敏度为:
(3)
可见灵敏度与有关,越接近,灵敏度越高,虽然内外极筒原始覆盖长度与灵敏度无关,但不可太小,否则边缘效应将影响到传感器的线性。
本实验为变面积式电容传感器,采用差动式圆柱形结构,如图5-1所示,此结构可以消除极距变化对测量精度的影响,并且可以减小非线性误差和增加传感器的灵敏度。其安装示意图如图5-2所示
图5-1圆柱形差动式电容传感器示意图图5-2圆柱形差动式电容传感器实验装置安装示意图
电容式传感器调理模块的电路图如图5-3所示
THVZ-1型传感器实验箱、电容传感器、测微头、万用表、信号调理挂箱、电容式传感器调理模块。
四、实验步骤
1.将“电容传感器调理模块电路图”插放到相应的实验挂箱上,在确保上述模块插放无误后,从实验屏上接入实验挂箱所需的工作电源(电源的大小及正负极性不能接错);
2.将电容式传感器引线插头插入信号调理挂箱“电容式传感器调理模块”旁边的黑色九芯插孔中;
3.调节“电容式传感器调理模块”上的电位器Rw1,逆时针调节Rw1使旋到底。用万用表测量此模块上输出两端的电压Uo;
4.旋动测微头改变电容传感器动极板的位置,每隔0.2mm记下位移量X与输出电压Uo,填入表5-1。
表5-1 电容传感器位移与输出电压值
五、实验注意事项
1.传感器要轻拿轻放,绝不可掉到地上。
2.做实验时,不要用手或其它物体接触传感器,否则将会使线性变差。
六、思考题
简述什么是电容式传感器的边缘效应,它会对传感器的性能带来哪些不
利影响。
七、实验报告要求
1.整理实验数据,根据所得的实验数据画出传感器的特性曲线,并利用最小二乘法画出拟合直线,计算该传感器的非线性误差。
2.根据实验结果,分析引起这些非线性误差的原因,并说明怎样提高传感器的线性度。
实验六霍尔传感器测转速实验
一、实验目的
掌握霍尔传感器的测速原理与应用。
二、实验原理
霍尔、光电传感器安装示意图如图6-1所示,霍尔传感器位于转盘的右上方,利用霍尔效应表达式:U H=K H IB,当被测电机转盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,其输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平。
图6-1霍尔、光电传感器安装示意图
三、实验设备
CPU模块、静态显示模块、THVZ-1型传感器实验箱、霍尔转速传感器、转动源、转动源电源2—24V。
四、实验步骤及内容
1、霍尔传感器及转动源已经安装于THVZ-1型传感器实验箱上,其中霍尔转速传感器位于转动源的右边。
2、把CPU模块、静态显示模块分别插放到相应的实验挂箱所在位置;
3、在确保上述模块插放无误后,从实验屏上接入实验挂箱所需的工作电源(电源的大小及正负极性不能接错)
4、将+5V直流源加于霍尔传感器的电源端。
5、将面板上的0~30V稳压电源调节到8 V,接入THVZ-1型传感器实验箱上的转动电源处。
6、用示波器观测霍尔传感器的输出端的波形。
7、通过2号导线及1号导线及“信号接口挂箱”上的“信号转接口”将“THVZ-1型传感器实验箱”上的“霍尔输出”端的信号接入到“CPU 模块”的T0端,同时用短路帽短接“CPU模块”的J3、J6的1-2端、J11的2-3端。
8、安装好仿真器,用串行数据通信线连接计算机与仿真器,把仿真头插到“CPU模块”的单片机插座中;打开电源开关,打开仿真器电源
9、启动计算机,打开伟福仿真软件,进入仿真环境。选择仿真器型号、仿真头型号、CPU类型;选择通信端口,测试串行口。
10、打开“转速测量表.ASM”源程序,阅读、理解程序。编译无误后,运行程序,观察转速表的数值变化。
11、调节转动源的输入电压,使转盘的速度发生变化的同时用示波器观察霍尔转速传感器输出端的波形及其频率的变化情况,观察转速表数值的变化。
五、注意事项
1、转动源的正负输入端不能接反;
2、转动源的输入电压不可超过24V,否则容易烧毁电机。
3、转动源的输入电压不可低于6V,否则由于电机转矩不够大,不能带
动转盘。
4、加入霍尔传感器的+5V直流电源线与地线之间不能接反。
六、思考题
根据上面实验观察到的波形,分析为什么方波的高电平比低电平要宽。
七、实验报告要求:
1、进一步阅读、理解程序;并画出程序流程图
2、对霍尔传感器应用的体会
实验七光电传感器测转速实验
一、实验目的
掌握光电传感器测量转速的原理及方法。
二、实验原理
霍尔、光电传感器安装示意图如图6-1所示,光电式转速传感器安装于电机转盘的左方,光电式转速传感器有反射型和透射型两种,本实验装置是透射型的,传感器端部有发光管和光电管,发光管发出的光源通过转盘上开的孔透射后由光电二极管接受转换成电信号,由于转盘上有相间的6个孔,转动时将获得与转速及孔数有关的脉冲,将电脉冲计数处理即可得到转速值。
三、实验设备
CPU模块、静态显示模块、THVZ-1型传感器实验箱、光电转速传感器、直流电源+5V,转动源电源。
四、实验步骤
1、光电转速传感器及转动源已经安装于THVZ-1型传感器实验箱上,其中光电式转速传感器位于转动源的左边。
2、把CPU模块、静态显示模块分别插放到相应的实验挂箱所在位置;
3、在确保上述模块插放无误后,从实验屏上接入实验挂箱所需的工作电源(电源的大小及正负极性不能接错)
4、将+5V直流电源加于光电传感器的电源端。
5、将面板上的0~30V稳压电源调节到8 V,接入THVZ-1型传感器实验箱上的转动电源处。
6、用示波器观测光电输出端的波形。
7、通过2号导线及1号导线及“信号接口挂箱”上的“信号转接口”将“THVZ-1型传感器实验箱”上的“光电输出”端的信号接入到“CPU 模块”的T0端,同时用短路帽短接“CPU模块”的J3、J6的1-2端、J11的2-3端。
8、安装好仿真器,用串行数据通信线连接计算机与仿真器,把仿真头插到“CPU模块”的单片机插座中;打开电源开关,打开仿真器电源
9、启动计算机,打开伟福仿真软件,进入仿真环境。选择仿真器型号、仿真头型号、CPU类型;选择通信端口,测试串行口。
10、打开“转速测量表.ASM”源程序,阅读、理解程序。编译无误后,运行程序,观察转速表的转速的变化。
11、调节转动源的输入电压,使转盘的速度发生变化的同时用示波器观察光电传感器输出端的波形及其频率的变化情况,并记录波形及频率值,观察转速表的转速的变化。
五、注意事项
1、转动源的正负输入端不能接反;
2、转动源的输入电压不可超过24V,否则容易烧毁电机。
3、转动源的输入电压不可低于6V,否则由于电机转矩不够大,不能带
动转盘。
六、思考题
根据上面实验观察到的波形,分析为什么方波的高电平比低电平要宽。
七、实验报告要求:
1、简述光电式转速传感器测速原理。
实验八模拟多路开关实验
一、实验目的
1、掌握模拟多路开关的实验方法
2、掌握模拟多路开关在模拟量输入通道中的应用。
二、实验电路图及编程说明
实验电路图请参考实验指导书附录中的“模拟量输入通道模块电路图”部分,在此模块中,MPC508(U1)为8通道多路开关,其引脚图如图8-2及主要功能说明如下:
INn(n=1~8)为8通道模拟量输入端,A0、A1、A2为通道选择控制端,EN为使能端,它们之间的关系见真值表8-1所示。
要访问MPC508多路开关,只要通过MOVX指令对端口地址(0000H~07FFH范围中的一个地址)写数据,从而选通相应的通道。
三、实验内容及步骤
1、本实验需要用到的实验模块包括:模拟量输入通道模块、译码模块、CPU模块;
2、把上述模块分别插放到相应的实验挂箱所在位置;
3、在确保上述模块插放无误后,从实验屏上接入实验挂箱所需的工作电源(注:电源的大小及正负极性不能接错),然后,用信号扁平线连接实验所需挂箱上的信号插座JP26、JP20。
4、安装好仿真器,用串行数据通信线连接计算机与仿真器,把仿真头插到“CPU模块”的单片机插座中;打开电源开关,打开仿真器电源
5、启动计算机,打开伟福仿真软件,进入仿真环境。选择仿真器型号、仿真头型号、CPU类型;选择通信端口,测试串行口。
6、打开文件夹“智能仪器部分软件”中的“多路开关实验.ASM”源程序,编译无误后,按照图8-1设置断点, 再分别点击全速运行图标,可以看到“模拟量输入通道模块”的LED灯的点亮情况;并用万用表分别测量CH0~CH7与OUT1的两端,看是否是导通的,其导通阻值约为240Ω。
四、源程序
ORG 0000H
LJMP MAIN
ORG 0030H
MAIN: MOV DPTR,#07FFH ;选择输入通道地址MOV A,#00000000B ;选择CH0通道
MOVX @DPTR,A
MOV A,#00100000B ;选择CH1通道
MOVX @DPTR,A
MOV A,#01000000B ;选择CH2通道
MOVX @DPTR,A
MOV A,#01100000B ;选择CH3通道
MOVX @DPTR,A
MOV A,#10000000B ;选择CH4通道
MOVX @DPTR,A
MOV A,#10100000B ;选择CH5通道
MOVX @DPTR,A
MOV A,#11000000B ;选择CH6通道
MOVX @DPTR,A
MOV A,#11100000B ;选择CH7通道
MOVX @DPTR,A
SJMP $
END
图8-1
表8-1
图8-2
实验九可编程增益放大器实验
一、实验目的
掌握可编程增益放大器在模拟量输入通道中的应用。
二、实验电路图及编程说明
实验电路图请参考实验指导书附录中的“模拟量输入通道模块电路图”部分,在此模块中,AD526(U2)为可编程增益放大器,其引脚图9-2及主要功能说明如下:
A2、A1、A0、B四端为控制增益的代码输入端,、为使能端,VIN端为信号输入端,VOUT端为信号输出端,它们之间的关系见真值表9-1,通过编程可以很方便的设置1、2、4、8、16不同的增益。
要访问AD526可编程增益放大器,只要通过MOVX指令对端口地址(0800H~0FFFH范围中的一个地址)写数据,从而选择对信号不同的放
合肥工业大学 计算机与信息学院 实验报告 课程:虚拟现实与仿真技术 专业班级:计算机科学与技术11-2班 学号: 姓名:谢云飞 实验一 一.实验名称
从3Dmax8中导出mesh并添加mesh到场景。 二.实验过程或实验程序(增加的代码及代码注解) 启动3Dmax 1.在安装有3Dmax8的计算机上,可以使用两种不同的方法来启动3Dmax8: (1)在桌面上双击“3Dmax8”图标 (2)点击“开始”菜单,在“程序”中的选择“3Dmax8” 2.观察3Dmax8主窗口的布局。3Dmax8主要由若干元素组成:菜单栏、工具栏、以及停靠在右边的命令面板和底部的各种工具窗口 使用3Dmax8建模并导出mesh 导出mesh的步骤如下: 1.启动3Dmax8 2.在停靠在右边的命令面板中,点击几何体按钮 3.选择标准几何体 4.在对象类型中选择对象(如:长方体),在“前”视口中,通过单击鼠标左键,创建出模型 5.在工具栏中单击“材质编辑器”按钮,通过上步操作,可开启“材质编辑器”对话框 6.在“材质编辑器”对话框中,点击漫反射旁方形按钮,进入到“材质/贴图浏览器” 7.在“材质/贴图浏览器”中选择位图,鼠标左键双击位图 8.弹出选择位图图像文件对话框,从本地电脑中选择一张图片 9.选择好图片,在材质编辑器对话框中,点击将材质指令给选定对象 10.点击菜单栏上的oFusion按钮,在弹出的菜单栏中选择Export Scene 11.选择文件夹并输入文件名qiu,点击保存,在弹出的对话框中勾选Copy Textures,点击Export按钮,此时mesh文件已成功导出 导出的mesh文件放入到指定位置 1.找到mesh文件,把mesh文件放到当前电脑的OgreSDK的models中,以我的电脑为例,OgerSDK放在C盘中 2.打开C盘,找到OgreSDK,打开OgreSDK,找到media,打开media文件夹,找到models,打开models文件夹,将mesh文件复制到此文件夹中 3.将导出mesh文件附带的材质文件放到OgreSDK的scripts (C:\OgreSDK\media\materials\scripts)中 4.将导出mesn文件时同时导出的图片放到OgreSDK的textures (C:\OgreSDK\media\materials\textures)中
《虚拟现实技术》课堂实验报告(2015-2016学年第2学期) 班级:地信1102 姓名:曹晓东 学号:31130503
实验一:Sketch Up软件认识与使用 一、实验目的与要求: 1. 目的 通过本次实验,使学生掌握Sketch Up软件的基本架构,理解利用Sketch Up进行场景制作的基本步骤,能够熟练运用Sketch Up软件的主要功能及相关工具。 2. 要求 每位学生进行Sketch Up软件的安装和配置,操作练习Sketch Up的主要功能及相关工具,理解体会各种操作的执行结果,并独立总结撰写完成实验报告。 二、Sketch Up的主要功能: 边缘和平面:这是绘图最基本的元素 每个 Sketch Up 模型皆由两种元素组成:边缘和平面。边缘是直线,而平面是由几条边缘构成一个平面循环时所形成的平面形状。例如,矩形平面是由四条边缘以直角角度互相连接在一起所构成的。自己可在短时间内学会使用 Sketch Up 的简单工具,从而绘制边缘和平面来建立模型。一切就是这么简单容易! 推/拉:从 2D 迅速转为 3D 使用 Sketch Up 专利设计的 [推/拉] 工具,可以将任何平面延伸成立体形状。单击鼠标就可开始延伸,移动鼠标,然后再单击即可停止延伸。自己可以将一个矩形推/拉成一个盒子。或绘制一个楼梯的轮廓并将其推/拉成立体的 3D 形状。想绘制一个窗户吗?只需在墙上推/拉出一个孔即可。Sketch Up 易于使用而广受欢迎,原因就在于其推/拉的功能。 精确测量:以精确度来进行作业处理 Sketch Up 特别适合在 3D 环境中进行迅速的绘图处理,但是它的功能不仅仅只是一只神奇的电子画笔而已。因为当自己在计算机上进行绘图处理时,自己在 Sketch Up 中所建立的一切对象都具有精确的尺寸。当自己准备好要建立模型时,自己可以随意根据自己想要的精确度来进行模型的建立。如果自己愿意,自己可以将模型的比例视图打印
虚拟现实实验报告 篇一:虚拟现实技术实验报告 虚拟现实技术实验报告 实验一:Sketch Up软件认识与使用 一、实验目的与要求: 1. 目的 通过本次实验,使学生掌握Sketch Up软件的基本架构,理解利用Sketch Up进行场景制作的基本步骤,能够熟练运用Sketch Up软件的主要功能及相关工具。 2. 要求 每位学生进行Sketch Up软件的安装和配置,操作练习Sketch Up的主要功能及相关工具,理解体会各种操作的执行结果,并独立总结撰写完成实验报告。 二、Sketch Up的主要功能: 边缘和平面:这是绘图最基本的元素 每个 Sketch Up 模型皆由两种元素组成:边缘和平面。边缘是直线,而平面是由几条边缘构成一个平面循环时所形成的平面形状。例如,矩形平面是由四条边缘以直角角度互相连接在一起所构成的。自己可在短时间内学会使用Sketch Up 的简单工具,从而绘制边缘和平面来建立模型。一切就是这么简单容易! 推/拉:从 2D 迅速转为 3D
使用 Sketch Up 专利设计的 [推/拉] 工具,可以将任何平面延伸成立体形状。单击鼠标就可开始延伸,移动鼠标,然后再单击即可停止延伸。自己可以将一个矩形推/拉成一个盒子。或绘制一个楼梯的轮廓并将其推/拉成立体的 3D 形状。想绘制一个窗户吗?只需在墙上推/拉出一个孔即可。Sketch Up 易于使用而广受欢迎,原因就在于其推/拉的功能。 精确测量:以精确度来进行作业处理 Sketch Up 特别适合在 3D 环境中进行迅速的绘图处理,但是它的功能不仅仅只是一只神奇的电子画笔而已。因为当自己在计算机上进行绘图处理时,自己在 Sketch Up 中所建立的一切对象都具有精确的尺寸。当自己准备好要建立模型时,自己可以随意根据自己想要的精确度来进行模型的建立。如果自己愿意,自己可以将模型的比例视图打印出来。如果自己有 Sketch Up Pro,自己甚至还可将自己的几何图形导出到 AutoCAD 和 3ds MAX 等其他程序内。 路径跟随:建立复杂的延伸和板条形状 使用 Sketch Up 创新万能的 [路径跟随] 工具,可以将平面沿预先定义的路径进行延伸以建立 3D 形状。沿 L 形线路延伸一个圆形即可建立一个弯管的模型。绘制瓶子的一半轮廓,然后使用 [路径跟随] 工具沿一个圆形来扫动,就能建立一个瓶子。自己甚至还可以使用 [路径跟随] 工具
浅谈虚拟现实技术在规划领域中的应用 作者:Why 摘要:随着信息时代的到来,越来越多的高新技术应用到社会的各个领域中来,而作为信息技术发展的首要驱动力的“虚拟现实”技术也越来越多地应用到规划领域中来。本文着重论述了虚拟现实技术在城市规划中的应用范围、应用的意义及其为我们带来的便利。 关键词:虚拟现实、范围、发展、迫切性、城市规划 虚拟现实(Virtual Reality,简称VR),又称灵境技术,是90年代为科学界和工程界所关注的技术。它的兴起,为人机交互界面的发展开创了新的研究领域;为智能工程的应用提供了新的界面工具;为各类工程的大规模的数据可视化提供了新的描述方法。它是一种基于可计算信息的沉浸式交互环境,具体的说,就是采用以计算机技术为核心的现代高科技生成逼真的视、听、触觉一体化的特定范围的虚拟环境,用户借助必要的设备以自然的方式与虚拟环境中的对象进行交互使用、相互影响,从而产正亲临其境的真实环境的感受和体验。这种技术的应用,改进了人们利用计算机进行多工程数据处理的方式,尤其在需要对大量抽象数据进行处理时;同时,它在许多不同领域的应用,可以带来巨大的经济效益。 1、虚拟现实技术的发展概述 1965年,Sutherland在篇名为《终极的显示》的论文中首次提出了包括具有交互图形显示、力反馈设备以及声音提示的虚拟现实系统的基本思想,从此,人们正式开始了对虚拟现实系统的研究探索历程。 随后的1966年,美国MIT的林肯实验室正式开始了头盔式显示器的研制工作。在这第一个HMD的样机完成不久,研制者又把能模拟力量和触觉的力反馈装置加入到这个系统中。1970年,出现了第一个功能较齐全的HMD系统。基于从60年代以来所取得的一系列成就,美国的JaronLanier在80年代初正式提出了“VirtualReality”一词。 80年代,美国宇航局(NASA)及美国国防部组织了一系列有关虚拟现实技术的研究,并取得了令人瞩目的研究成果,从而引起了人们对虚拟现实技术的广泛关注。1984年,NASAAmes研究中心虚拟行星探测实验室的M.McGreevy和J.Humphries博士组织开发了用于火星探测的虚拟环境视觉显示器,将火星探测器发回的数据输入计算机,为地面研究人员构造了火星表面的三维虚拟环境。在随后的虚拟交互环境工作站(VIEW)项目中,他们又开发了通用多传感个人仿真器和遥现设备。 进入90年代,迅速发展的计算机硬件技术与不断改进的计算机软件系统相匹配,使得基于大型数据集合的声音和图象的实时动画制作成为可能;人机交互系统的设计不断创新,新颖、实用的输入输出设备不断地进入市常而这些都为虚拟现实系统的发展打下了良好的基矗例如1993年的11月,宇航员利用虚拟现实系统成功地完成了从航天飞机的运输舱内取出新的望远镜面板的工作,而用虚拟现实技术设计波音777获得成功,是近年来引起科技界瞩目的又一件工作。可以看出,正是因为虚拟现实系统极其广泛的应用领域,如娱乐、军事、航天、设计、生产制造、信息管理、商贸、建筑、医疗保险、危险及恶劣环境下的遥操作、教育与培训、信息可视化以及远程通讯等,人们对迅速发展中的虚拟现实系统的广阔应用前景充满了憧憬与兴趣。 2、虚拟现实在规划领域的应用范围 虚拟现实在规划信息存储和查询系统中的应用 例如土质数据库系统,地域信息系统,地理信息系统,城市政策信息系统等。这一类系
数虎图像提供虚拟仿真实验室硬件设备搭建和内容制作整体解决 方案 虚拟现实实验室是虚拟现实技术应用研究就的重要载体。 随着虚拟实验技术的成熟,人们开始认识到虚拟实验室在教育领域的应用价值,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点.近年来,国内的许多高校都根据自身科研和教学的需求建立了一些虚拟实验室。数虎图像拥有多名虚拟现实软硬件工程师,在虚拟现实实验室建设方面有着无与伦比的优越性! 下面请跟随数虎图像一起,让我们从头开始认识虚拟现实实验室。【虚拟现实实验室系统组成】: 建立一个完整的虚拟现实系统是成功进行虚拟现实应用的关键,而要建立一个完整的虚拟现实系统,首先要做的工作是选择确实可行的虚拟现实系统解决方案。 数虎图像根据虚拟现实技术的内在含义和技术特征,并结合多年的虚拟现实实验室建设经验,最新推出的虚拟现实实验室系统提供以下组成:
虚拟现实开发平台: 一个完整的虚拟现实系统都需要有一套功能完备的虚拟现实应用开发平台,一般包括两个部分,一是硬件开发平台,即高性能图像生成及处理系统,通常为高性能的图形计算机或虚拟现实工作站;另一部分为软件开发平台,即面向应用对象的虚拟现实应用软件开发平台。开发平台部分是整个虚拟现实系统的核心部分,负责整个VR场景的开发、运算、生成,是整个虚拟现实系统最基本的物理平台,同时连接和协调整个系统的其它各个子系统的工作和运转,与他们共同组成一个完整的虚拟现实系统。因此,虚拟现实系统开发平台部分在任何一个虚拟现实系统中都不可缺少,而且至关重要。 虚拟现实显示系统: ·高性能图像生成及处理系统 ·具有沉浸感的虚拟三维显示系统 在虚拟现实应用系统中,通常有多种显示系统或设备,比如:大屏幕监视器、头盔显示器、立体显示器和虚拟三维投影显示系统,
外文翻译 设计题目:基于虚拟现实的虚拟实验室的 研究 原文1:VRML 译文1:虚拟现实 原文2:VR-LAB 译文2:虚拟现实实验室
原文1: VRML Durch die immer bessere Hardware ist es heute nicht mehr n?tig,für anspruchsvolle 3D-Grafiken spezielle Grafik-Workstations zu verwenden.Auf modernen PCs kann jeder durch dreidimensionale Welten fliegen.Um solche Welten zu definieren und sie über das Internet zu verbinden,wurde die Sprache VRML entwickelt. In diesem Beitrag geben wir einen überblick über die grundlegenden Konzepte der Version 2.0 von VRML. ●Geschichte von VRML Im Frühling 1994 diskutierte auf der ersten -Konferenz in Genf eine Arbeitsgruppe über Virtual Reality-Schnittstellen für das .Es stellte sich heraus, da?man eine standardisierte Sprache zur Beschreibung von 3D-Szenen mit Hyperlinks brauchte. Diese Sprache erhielt in Anlehnung an HTML zuerst den Namen Virtual Reality Markup Language.Sp?ter wurde sie in Virtual Reality Modeling Language umbenannt. Die VRML-Gemeinde spricht die Abkürzung gerne …W?rml“ aus. Basierend auf der Sprache Open Inventor von Silicon Graphics (SGI) wurde unter der Federführung von Mark Pesce die Version 1.0 von VRML entworfen. Im Laufe des Jahres 1995 entstanden eine Vielzahl von VRML Browsern (u. a.WebSpace von SGI) und Netscape bot schon sehr früh eine hervorragende Erweiterung, ein sogenanntes PlugIn, für seinen Navigator an.Die virtuellen Welten, die man mit VRML 1.0 spezifizieren kann,sind zu statisch.Zwar kann man sich mit einem guten VRML-Browser flott und komfortabel durch diese Welten bewegen,aber die Interaktion ist auf das Anklicken von Hyperlinks beschr?nkt. Im August ’96,anderthalb Jahre nach der Einführung von VRML 1.0,wurde auf der SIGGraph ’96 die Version VRML 2.0 vorgestellt.Sie basiert auf der Sprache Moving Worlds von Silicon Graphics. Sie erm?glicht Animationen und sich selbst?ndig bewegende Objekte.Dazu mu?te die Sprache um Konzepte wie Zeit und Events erweitert werden.Au?erdem ist es m?glich, Programme sowohl in einer neuen Sprache namens VRMLScript oder in den Sprachen JavaScript oder Java einzubinden. ●Was ist VRML? Die Entwickler der Sprache VRML sprechen gerne von virtueller Realit?t und virtuellen Welten.Diese Begriffe scheinen mir aber zu hoch gegriffen für das, was heute technisch machbar ist: eine grafische Simulation dreidimensionaler R?ume und Objekte mit eingeschr?nkten
虚拟现实虚拟导游实训实验室建设方案 导游专业仿真实验室又被称之为:旅游教学-导游培训系统。应用虚拟现实系统平台,可以将客户提供的旅游景点虚拟数据全部集成到播放平台,利用虚拟现实培训平台,导游人员、旅游管理人员不用花费大量时间、精力,就可以通过旅游实训系统平台随意浏览旅游景点,通过文字、图片、影片介绍,学习景区、景点、景观的历史、文化知识,为日后社会实践做好准备。 一、软件部分 (一)模拟导游实训平台软件,3套 系统以满足旅游教学为目的,采用是计算机虚拟现实技术、仿真技术、项目管理技术和智能控制技术,以实现指定区间内的原貌再现,人机实时交互操作。系统人机界面友好,采用多级中文菜单,能对三维场景和三维数字模型进行科学有效、方便快捷的管理、维护和更新。主要特点如下: (1)采用虚拟现实技术(vr)实现对景点的指定区间进行整体仿真,系统(不依赖于硬件实现)可实现三通道环幕投影系统的边缘融合和几何校正(包含曲面矫正)功能(画面上几乎看不出融合区),可以让操作者在虚拟现实环境内自行漫游。软件运行速度应大于每秒30帧。 (2)互动方式:可通过简洁操作对场景的进程进行实时有效的控制。 (3)自主漫游功能:通过鼠标,键盘,手柄的简单结合,或触摸屏可以方便灵活的实现前进、后退、左转、右转、左平移、右平移、上升、下降、仰视、俯视、跳跃等一系列视点操作,并可自定义运动速度。可以在固定路线和自由游离中实时切换相机焦距,并具备焦距切换快捷键。 (4)录制、重播、自动漫游浏览功能:能够对“从任意点开始至任意点结束的自主漫游(如第4条)方式”进行录像、重播(含在此处随即插入的解说录音)。能够从任意点开始,沿预先设定好的路径进行自动浏览,并可随时选择突出自动漫游模式,视点停留在该处进行自主漫游,并可预先设置多条自动浏览路线。 (5)配音、解说:①允许在特定景点处配解说。使用方可以在系统完成并交付使用后按教学需要另行录制解说词,并由使用人自行选择是否播放解说词。②在进行自主漫游时,解说词的播放速度不受漫游速度的影响。③允许在任意点进行自主漫游时配音并重复播放录音。 ④配乐方面,使用方可以在系统完成并交付使用后按教学需要另行配乐,并由使用人自行选择是否播放配乐。⑤在自动漫游浏览时,可以控制是否播放解说和配乐。⑥系统完成并交付使用后,使用方可以按教学需要自行转换成录制其它语种的解说词,并由使用人自行选择是否播放解说词及所播放的解说词的语种。 (6)二维导航图和视点切换:可以随时进入整个景区的二维全景图,在二维全景图上,除了实时表示当前观察点所在位置外,可以方便的通过鼠标点击景点标志或在对话框内输入特定景点名称的方式,使系统自动切换至该指定处,实现快速位置定位。 (7)支持高性能物理引擎系统,以增加教学过程的互动性和师生的创造性:可实时计算场景中,物体与场景之间,物体与角色之间、物体与物体之间的运动交互和动力学特性。 (8)支持景点骨骼动画:为了让虚拟的教学环境更加逼真,更生动,在场景中可以表现骨骼动画(人物动画、汽车、动物触发动画如天空飞行的飞鸟)。 (9)支持各种特效:包括hdr、泛光、运动模糊、景深,非聂耳水面,模拟霓虹灯,雾效、太阳炫光、太阳光晕、体积光、实时环境反射、花草树木随风摆动、群鸟飞行动画、雨雪模拟等。
虚拟现实实习报告 篇一:VR虚拟现实实验报告 《虚拟现实技术》课堂实验报告 (XX-XX学年第2学期) 班级:地信一班 姓名:冯正英 学号: 3 实验一:Sketch Up软件认识与使用 一、实验目的与要求: 1. 目的 通过本次实验,使学生掌握Sketch Up软件的基本架构,理解利用Sketch Up进行场景制作的基本步骤,能够熟练运用Sketch Up软件的主要功能及相关工具。 2. 要求 每位学生进行Sketch Up软件的安装和配置,操作练习Sketch Up的主要功能及相关工具,理解体会各种操作的执行结果,并独立总结撰写完成实验报告。 二、Sketch up的主要功能: 1、独特而便捷的推拉工具:功能强大且操作简便的推拉工具,所有的造型几乎都可从推拉方式中完成。 2、可汇入导出AutoCAD的各式图面:可读取与写出各版本的AutoCAD DWG格式,并可自模型中汇出平、立、剖面
的DWG图面,让您延用原有的设计而无须重新处理。 3、精确的尺寸输入与文字注释:所有的外型不再只是大约的视觉比例,透过数值输入框可赋予精密而正确的尺寸,也能直接在立体图面上进行尺寸标注和注释,大大地增强图面解说力。 4、随贴即用的材质彩绘功能:任何的图像档均能搭配彩绘工具贴附于模型表面,无须经过彩现计算,便能直接呈现出材质的原貌,既快速又有效率。所有材质均可立即编修大小比例、角度与扭转变形,并直接调整透明度。 5、随贴即用的材质彩绘功能:任何的图像档均能搭配彩绘工具贴附于模型表面,无须经过彩现计算,便能直接呈现出材质的原貌,既快速又有效率。所有材质均可立即编修大小比例、角度与扭转变形,并直接调整透明度。 6、动态剖面:提供即时互动的剖面功能,清楚的呈现出剖切后的空间状态。透过场景功能,还可以动态模拟剖面的生成效果。 7、卓越的路径跟随建构能力:只需设计出所要的断面,便能沿着路径组合出各种复杂的造型。 8、全新的Layout布图能力:以类似于AutoCAD图纸空间的方式,将多种不同的图面角度和内容,依您的需要置放在Layout图纸上,并可直接标注尺寸、注释和加注图框,完全不需要再使用传统的2D软件即可完成图说。
虚拟现实技术实验报告----创建VRML基本 造型 华北水利水电学院虚拟现实技术实验报告 20XX~20XX学年第二学期 20XX 级计算机科学与技术专业班级: 20XX153 学号: 20XX15320 姓名:李晓娜 实验二创建VRML基本形体 一、实验目的: 掌握创建虚拟现实复杂形体的方法与步骤,掌握虚拟现实背景环境、光照、纹理贴图、视点的创建与使用。 二、试验内容: 1)虚拟现实复杂组合形体的构建 2)虚拟现实背景建模与特殊场景效果的实现 3)虚拟现实光照与纹理贴图 4)虚拟现实视点的创建与使用 三、试验步骤: 1)虚拟现实复杂组合形体的构建 1、设置背景颜色,skyColor 1 1 1,即白色。 2、构造Shape造型节点。设置外观,材质漫反射颜色为:,即红色;几何造型为Box,其size为:10 5。 3、创建坐标变换节点。位置变换translation为- 0 ,旋转rotation为:1 0 0 ,子结点为挤压造型,外观颜色
设置为红色,其中crossSection [0 0 0 2 0 2 ] spine [ 0 0 0 9 0 0] solid 为:FALSE。 4、构造坐标变换节点,translation 为:2 - - rotation为: 0 1 0 其子结点children为文本造型,字符串为:“20XX15320”。 5、构造坐标变换节点,translation为:-4 -5 ,其子结点children中定义shape节点造型,命名为:leg,材质漫反射颜色为红色,几何造型节点为:Box,其size为: 6 6、连续创建3个坐标变换节点,分别设置其translation 值,子结点children引用leg。 7、创建桌子下面的横木。构造坐标变换节点,translation为:-4 -6 0 子结点children中为shape节点命名为:hengmu,外观漫反射颜色为:红色;几何造型为:Box,大小size为: 3。然后再构造一个坐标变换节点,子结点引用hengmu。 2)虚拟现实背景建模与特殊场景效果的实现 1、背景建模。构建空间全景:skyAngle [ ] skyColor [ 0 0 1 0 1 1 ] groundAngle [ ] groundColor [ ] 2、创建树坐标变换节点,命名为Tree,子节点项目children中的值为老师所给的素材shu, 第 1 页共 4 页 以备以后调用。
虚拟现实技术的概念和类型 虚拟现实技术的概念和类型 1. 虚拟现实的概念 虚拟现实技术是利用三维图形生成技术、多传感交互技术以及高分辨显示技术,生成三维逼真的虚拟环境,使用者戴上特殊的头盔、数据手套等传感设备,或利用键盘、鼠标等输入设备,便可以进入虚拟空间,成为虚拟环境的一员,进行实时交互,感知和操作虚拟世界中的各种对象,从而获得身临其境的感受和体会。 2. 虚拟现实的特征 (1) 沉浸性 虚拟现实技术是根据人类的视觉、听觉的生理心理特点,由计算机产生逼真的三维立体图像.使用者戴上头盔显示器和数据手套等交互设备,便可将自己置身于虚拟环境中,成为虚拟环境中的一员。使用者和虚拟环境中的各种对象的相互作用,就如同在现实世界中的一样。当使用者移动头部时,虚拟环境中的图像也实时地跟随变化,拿起物体可使物体随着手的移动而运动,而且还可以听到三维仿真声音。使用者在虚拟环境中,一切感觉都是那么逼真,有一种身临其境的感觉。。 (2) 交互性 虚拟现实系统中的人机交互是一种近乎自然的交互,
使用者不仅可以利用电脑键盘、鼠标进行交互,而且能够通过特殊头盔、数据手套等传感设备进行交互。计算机能根据使用者的头、手、眼、语言及身体的运动,来调整系统呈现的图像及声音。使用者通过自身的语言、身体运动或动作等自然技能,就能对虚拟环境中的对象进行考察或操作。 (3) 想象 由于虚拟现实系统中装有视、听、触、动觉的传感及反应装置,因此,使用者在虚拟环境中可获得视觉、听觉、触觉、动觉等多种感知,从而达到身临其境的感受。 3.虚拟现实技术的类型 (1) 桌面虚拟现实 (2) 沉浸的虚拟现实 (3) 增强现实性的虚拟现实 (4) 分布式虚拟现实 4.虚拟现实技术在网络教育中的作用 (1) 弥补远程教学条件的不足 在远程教学中,往往会因为实验设备、实验场地、教学经费等方面的原因,而使一些应该开设的教学实验无法进行。利用虚拟现实系统,可以弥补这些方面的不足,学生足不出户便可以做各种各样的实验,获得和真实实验一样的体会,从而丰富感性认识,加深对教学内容的理解。 (2) 避免真实实验或操作所带来的各种危险
虚拟现实技术小组实习报告 学院遥感信息工程学院 班级XXX班 组员 汤XX 王XX 郑XX 指导教师XXX 日期20XX.11.XX
(一)小组实习报告 一、实习目的 1、了解和熟悉了3ds max、unity 3D等虚拟现实设计建模及开发软件各自的功能和操作。 2、了解并掌握利用c++进行虚拟现实漫游系统开发的基本算法和理念。 3、加深对课本所学的理论知识的理解和掌握,掌握虚拟现实技术的基本概念、原理、分类、特性等,学会利用一些常用的虚拟现实设计软件进行虚拟现实系统的开发设计。 二、实习内容 设计并实现了古代小镇五侠镇虚拟现实的漫游系统。本次实习我们小组在3DS MAX里进行三维场景创建、修改导出为FBX模型之后,导入unity3D再通过使用unity3D 进行三维漫游系统设计与开发,最后导出exe文件。 三、实习实现方案 对于此次虚拟现实漫游系统设计,我们组考虑以古代小镇为背景场景设计建模漫游系统对象,所建立的漫游系统将包括小镇房屋、地形、河流、喷泉、天气变化等基本对象,使用unity3D添加河流、光照、喷泉等特效;使用脚本编辑完成天气的变化;每个房屋和树木进行碰撞体添加之后完成碰撞检测功能;通过添加粒子系统完成了落叶等效果。 3.1 3dsmax简介 3dsmax是美国Autodesk公司旗下优秀的电脑三维动画、模型和渲染软件,全称:3D Studio MAX。该软件早期名为3DS,是应用在dos下的三维软件,之后随着PC机的高速发展,Autodesk公司于1993年开始研发基于PC 下的三维软件,终于在1996年3D Studio MAX V1.0问世,图形化的操作界面,使应用更为方便。3D Studio MAX从V4.0开始简写成3dsmax,随后历经V1.2,2.5,3.0,4.0,5.0(未细分).....Autodesk坚持不懈的努力不断更新更高级的版本,逐步完善了灯光、材质渲染,模型和动画制作。广泛应用于三维动画、影视制作、建筑设计等各种静态、动态场景的模拟制作。 3.2 Unity 3D简介 Unity3D是由Unity Technologies开发的一个让玩家轻松创建诸如三维视频游戏、建筑可视化、实时三维动画等类型互动内容的多平台的综合型游
2013年中考说明文阅读题精选:熠熠发光的虚拟现实技术 阅读下面选文,完成12-16题。 熠熠发光的虚拟现实技术 刘露 2010年上海世博会已在全球瞩目之中落下了帷幕,但是,“永不落幕”的网上世博会却依然吸引无数游客的眼球。世博史上首个“在线世博”成为中国举办世博会的一大创举,“在线世博”充分利用和借助3D、虚拟现实和互联网技术将上海世博会的精彩内容以虚拟和现实相结合的方式呈现出来,打造出一个能够进行三维体验和互动交流的综合性网络平台,为世博会插上数字化的翅膀,使世博会得到更广泛的传播。上海世博会惟妙惟肖的网上展馆以及2.8亿次的点击访问量,已经让虚拟现实技术展现出了巨大的吸引力。 虚拟现实是一种可以创建和体验虚拟世界的计算机系统。它充分利用计算机硬件与软件资源的集成技术,提供了一种实时的、三维的虚拟环境,使用者完全可以进入虚拟环境中,观看计算机产生的虚拟世界,听到逼真的声音,在虚拟环境中交互操作,有真实感,可以讲话,甚至能够嗅到气味。 虚拟与现实两词具有相互矛盾的含义,把这两个词放在一起,似乎没有意义,但是科学技术的发展却赋予了它新的含义。 虚拟现实的关键技术可以包括以下几个方面:1、动态环境建模技术;2、实时三维图形生成技术;3、应用系统开发工具;4、系统集成技术。使用者不仅能够通过虚拟现实系统感受到在客观物理世界中所经历的“身临其境”的逼真性,而且能够突破空间、时间以及其他客观限制,感受到真实世界中无法亲身经历的体验。 现在虚拟现实技术已经和理论分析、科学实验一起,成为人类探索客观世界规律的三大手段。当人们需要构造当前不存在的环境(合理虚拟现实)、人类不可能达到的环境(夸张虚拟现实)或构造纯粹虚构的环境(虚幻虚拟现实)以取代需要耗资巨大的真实环境时,就可以利用虚拟现实技术。 虚拟现实技术的应用前景十分广阔。它始于军事和航空航天领域的需求——早在20世纪70年代,美国便开始将虚拟现实技术用于培训宇航员。随后,这种省钱、安全、有效的虚拟方法被推广到各行各业中。例如,克莱斯勒公司1998年初便利用虚拟现实技术,在设计某两种新型车上取得突破,首次使设计的新车直接从计算机屏幕投入生产线,也就是说完全省略了中间的试生产过程。 近年来,虚拟现实技术更是大步走进工业、建筑设计、教育培训、文化娱乐等各个方面,逐渐改变着我们的生活。而在虚拟现实技术的应用领域,基于互联网的应用开始显现出前所未有的爆发力。 国内为数不少的数字科技馆、数字规划馆、数字博物馆都已经开始采用虚拟现实技术。馆内展品都经过虚拟现实技术得到了1:1的数码还原,供人们在网上“端详”、“赏玩”。 此外,根据国外媒体的报道,澳大利亚新南威尔士大学采矿工程学系,还利用虚拟现实技术开发出面向煤炭开采行业的培训系统,并为国外一些先进的采矿公司所使用。该系统通过虚拟现实技术,模拟出矿坑内常见问题,让矿工们针对自主逃生、倒班前矿车检查、危险预警、隔离程序、瓦斯管理、煤层自燃等各种环节进行训练,以此降低矿难造成的伤亡。该大学采矿工程学系教授罗伯特·路易斯说:“这个项目可以让人更深刻理解虚拟现实技术对人类的影响,它的作用远不只展示和娱乐。” 虚拟现实技术的应用领域日趋网络化、多元化,虚拟现实技术将与人类更加贴近,未来互联网的主角很有可能就是虚拟现实技术。
5G+VR创新实验室建设方案 (2020年)
目录 一、背景分析 (2) 二、指导思想 (3) 三、课程设置 (4) 四、环境建设 (8) 五、设备配置 (12)
一、背景分析 随着时代的进步、科技的发展,国家对教育越来越重视,教育信息化也已成为中国教育行业的发展趋势,教育部在2018年2月份出台的《2018年教育信息化和网络安全工作要点》中,明确将虚拟现实技术列入教育信息化的年度重点工作任务,并明确要求全国高校、中小学、职教等深入推进信息技术与高等教育教学深度融合,推动大数据、虚拟现实、人工智能等新技术在教育教学中的深入应用。其中,列入高教司责任的工作任务为,深入推进信息技术与高等教育教学深度融合,加快网络优质教育资源建设与应用。加快推进示范性虚拟仿真实验教学项目建设,项目运营平台上线运行。 目前国内中小学的VR+STEAM教育主要体现在编程类、媒体制作类软件的应用,多以综合实践课程、信息技术课程、通用技术课程为主。在应试教育为主流的环境下,创新性教育还受到众多家长和教师的重视,我国学生的创新能力还有待提高。创新实验室旨在提高中小学生的创新能力,提出将创新实验室作为培养学生创新能力的载体,期望通过创新性实验室方法的采用和创新型实验环境的构建达到培养创新型人才的目的。 结合国内外已建成的创新型实验室,中小学创新实验室可分为以下几种形态:数字化实验室、校本创新实验室、科学工坊、科技馆、气象站环保检测站等科普设施。今后实验室将日渐向以数字化、网络化、健康化及人性化为基准,同时兼具简单适用、经济大方、互联互通等可操作性要素方向发展。 为了有效实现学生的培养目标,激发学生的创新意识,加强学生的创新思维,提高学生的创新技能,提高教师的创新素养;为了提高学校自身的现代化管理水平,丰富教学方法和手段,提高工作效率;为了响应《2018年教育信息化和网
华北水利水电学院虚拟现实技术实验报告 2009~2010学年第二学期07 级计算机专业 班级:学号:姓名: 实验三虚拟现实复杂场景建模与漫游仿真 一、实验目的: 掌握虚拟现实技术复杂三维场景建模技术。在场景中引入环境背景、动画与交互等,构建逼真的三维场景。 二、试验要求: 本次试验为综合性质试验,要求自行设计一个较为复杂的场景或者单体模型,其中包含各种造型与渲染技术,比如纹理材质、光照、环境背景、声音视频、动画与交互等。场景内容不限。 三、试验步骤: 我感觉主要是这些物品的平移比较主要。 Transform { translation -2 0.35 0.15 children [ # import the file "int_comp2.wrl" to draw the computer on the left side of the desktop Inline {url "zhuji.wrl"} ] }, # move to draw the next object and reduce the size to 40% Transform{ translation 0.0 1.1 0.25 scale 0.4 0.4 0.4 children [ # import the file "monb11.wrl" to draw the monitor on top of the desk Inline {url "computer.wrl"} ] }, # move to draw the next object and reduce the size to 40% Transform{ translation 2 0.1 -0.05 scale 0.4 0.4 0.4 children [ # import the file "lx4'.wrl" to draw the desklamp on top of the desk Inline {url "diandeng.wrl"} ]
我对虚拟现实技术的理解和虚拟现实技术的研究热点 1 引言 虚拟现实技术是一种人- 机交互工具, 这种工具的创造或设计是基于人与周围真实世界的交互方式。交互是通过多种传感器信息来进行的, 除了视觉、听觉, 还包括触觉、力觉、嗅觉等。也就是利用计算机生成一种模拟环境, 通过多种传感器使用户“投入”到该环境中去, 实现用户与该环境进行直接自然的交互技术。这里所谓的模拟环境就是用计算机生成的具有表面色彩的立体图形, 它可以是某一特定现实世界的真实体现, 也可以是纯粹的构想世界。 2 虚拟现实技术重要的特征 ( 1) 多感知性 是指除了一般计算机技术所具有的视觉感知之外, 还有听觉感知、力觉感知、触觉感知、运动感知、甚至还包括味觉感知、嗅觉感知等。理想的虚拟现实技术应该具有一切人所具有的感知功能。由于相关技术的限制, 特别是传感技术的限制, 目前虚拟现实技术所具有的感知功能仅限于视觉、听觉、力觉、触觉、运动等几种, 无论从感知范围还是从感知的精确程度都尚无法与人相比拟。 ( 2) 存在感 又称临场感, 它是指用户感到作为主角存在于模拟环境中的真实程度。理想的模拟环境应该达到使用户难以分辨真假的程度。例如,可视场景随视点的位置而变化。 ( 3) 交互性 是指用户对模拟环境内物体的可操作程度和从环境得到反馈的自然程度(包括实时性)。例如, 用户可以用手去直接抓取模拟环境中的物体, 这时手有握着东西的感觉, 并可以感觉物体的重量, 视场中被抓住的物体也立刻随着手的移动而移动。 ( 4) 自主性 是指虚拟环境中物体依据物理定律动作的程度。例如, 当受到力的推动时, 物体会向力的方向移动, 或翻倒, 或从桌面落到地面等。虚拟现实技术的四大特征使得我们不难将V R与相关技术区分开来, 如仿真技术、计算机图形技术及多
基于虚拟现实技术的教育解决方案的研制与开发 科技项目可行性报告
目录 一、项目提出的目的及意义………………………………………… 二、与项目相关的国内外发展概况及市场需求分析……………… 三、主要攻关内容及技术路线(技术可行性分析)……………… 四、该项目的技术创新点…………………………………………… 五、现有工作基础和条件…………………………………………… 六、申请的基础条件(包括主要研究成果)……………………… 七、进度安排和实施方案(包括运行机制)……………………… 八、预期成果和考核目标…………………………………………… 九、推广及应用前景………………………………………………… 十、经费概算及来源…………………………………………………十一、结论……………………………………………………………附件---虚拟现实沉浸技术实验室条件建设需求……………………
一、项目提出的目的及意义 互联网、虚拟现实和人工智能被喻为改变人类认知世界的三大信息技术。 互联网从少被社会广泛认知,到今天对社会生活的全面颠覆与渗透不过二十余年。如今互联网+已为国家战略。当互联网在我们生活中掀起一个又一个骇浪时,虚拟现实正悄然从幕后走向前台。今天虚拟现实正演绎着当年互联网对人类生活,从无足轻重到全面颠覆的革命性过程。科技以虚拟现实给人类生活再创造出一次惊喜己为期不远。虚拟现实技术与教育: “虚拟现实”(Virtual Reality,英文缩写VR)技术,利用计算机硬件+软件资源+传感器的一种集成技术,构成实时三维图形生成的技术、仿真技术、多传感交互技术以及显示技术等,生成实时的、具有三维信息的人工虚拟环境,演练者(操作人员)根据需要通过多种交互设备(如头盔、数据手套和刚性外骨架衣服等)来驾驭该环境,以及用于操纵环境中的对象,如在真实世界中一样地与该环境中的人和事物进行行为和思想等的实时交流,并产生逼真的身临其境感。虚拟现实技术不是相关技术的简单组合,而是一种创新性的综合,并且在思想方式上有质的飞跃。 虚拟现实技术对教育产生不可估量的作用,主要理由如下: 1.虚拟现实技术创建全新的教育环境 人们普遍认为,虚拟现实技术将使21世纪的教育发生质的变化。虚假现实技术支持下的教育之所以会发生质的变化,是因为虚拟教育环境拥有现实教育培训环境无可比拟的优势。所谓虚拟教育环境,是指由虚拟现实技术生成的一类适于进行虚拟现实技术生成的一类适于进行虚拟教育的人工环境,它可以是某一现实世界的基础或设施的真实实现,也可以是虚拟构想成的世界。在21世纪,可能兴办起依托虚拟现实技术的各种新型的学校教育,如基础教育、军事教育、各类培训教育,许多学员在虚拟环境中接受各种教育体验与训练。由虚拟现实技术所支撑的教育系统将使得人员可以在虚拟环境中方便地取得感性知识和实际经验。与现实教育基地或设施相比,在虚拟现实技术支持下的虚拟教育环境大致有如下特征和优势: 1.1仿真性 学生通过虚拟设施训练,与在现实教学基地里同样方便。这是因为虚拟环境无论对于现实的环境或是对于想象的环境,都是虚拟的但又是逼真的。理想的虚拟环境应该达到使受训者难以分辩真假的程度(例如可视场景应随着视点的变化而变化),甚至比真
虚拟现实实验报告(DOC 30页)
实验一造型定位和旋转、缩放 一、实验内容: 1.熟悉VrmlPad编辑器的安装和使用 2.熟悉Cortonaplayer浏览器的安装和使用 3.掌握虚拟造型的基本操作。 二、实验环境: 1.硬件环境 计算机一台 2.软件环境 WindowsXP操作系统、VrmlPad编辑器和Cortonaplayer浏览器三、实验步骤: 完成第四章例4-1 代码: Shape { appearance Appearance { material Material { diffuseColor 0.9 0.1 0.05 } } geometry Sphere { radius 0.85 } } Shape { appearance Appearance { material Material {
实验二三维立体造型的设计与实现(需交实验报告) 一、实验内容 1.熟悉各种立体造型的设计 2.学会利用各种不同的立体造型组合实现复杂的造型 二、实验环境 1.硬件环境 计算机一台 2.软件环境 WindowsXP操作系统、VrmlPad编辑器和Cortonaplayer浏览器 三、实验步骤: 1.制作一个烟囱的立体造型,首先以原点为中心生成一个半径为 1、高度为2的圆柱体,然后以(0,0,1.5)为坐标变换节点的 新原点生成一个底面半径为2,高度为1的圆锥体。 2.建立一个带刻度的钟表造型:首先生成钟表面box造型,然后 在钟表面上利用球体sphere造型生成各个刻度,利用圆柱体 cylinder造型生成时针、分针等造型。其中利用Transform 坐标变换节点对各个造型进行平移、缩放以及旋转操作。 3.设计一个文本造型。 4、完成书中第四章的例4-2 、4-3和4-4。 1)4-2 代码: Transform { translation -2 0 0