
永磁同步电机与异步电机性能比较 永磁同步电机与异步电机相比,具有明显的优势,它效率高,功率因素高,能力指标好,体积小,重量轻,温升低,技能效果显著,较好地提高了电网的品质因素,充分发挥了现有电网的容量,节省了电网的投资,它较好地解决了用电设备中“大马拉小车”现象。 1. 效率及功率因素 异步电机在工作时,转子绕组要从电网吸收部分电能励磁,消耗了电网电能,这部分电能最终以电流在转子绕组中发热消耗掉,该损耗约占电机总损耗的20~30%,它使电机的效率降低。该转子励磁电流折算到定子绕组后呈感性电流,使进人定子绕组中的电流落后于电网电压一个角度,造成电机的功率因数降低。另外,从永磁同步电机与异步电机的效率及功率因数曲线(图1)可以看出,异步电动机在负载率(=P2/P n)<50%时,其运行效率和运行功率因数大幅度下降,所以一般都要求其在经济区内运行,即负载率在75%-100%之间。 (a) η--( P2/P n) (b) ? cos--( P2/P n) 图1 永磁同步电动机与异步电动机的效率和功率因数 1. 异步起动永磁同步电动机 2.异步电动机 永磁同步电机在转子上嵌了永磁体后,由永磁体来建立转子磁场,在正常工作时转子与定子磁场同步运行,转子中无感应电流,不存在转子电阻损耗,只此一项可提高电机效率
4%~50%。由于在水磁电机转子中无感应电流励磁,定子绕组有可能呈纯阻性负载,使电机功率因数几乎为1.从永徽同步电机与异步电机的效率及功率因数曲线(图1)可以看出,永磁同步电机在负载率>20%时,其运行效率和运行功率因数随之变化不大,且运行效率>80%. 2. 起动转矩 异步电机起动时,要求电机具有足够大的起动转矩,但又希望起动电流不要太大,以免电网产生过大的电压降落而影响接在电网上的其他电机和电气设备的正常运行。此外,起动电流过大时,将使电机本身受到过大电做力的冲击,如果经常起动,还有使绕组过热的危险。因此,异步电机的起动设计往往面临着两难选择。 永磁同步电机一般也采用异步起动方式,由于永磁同步电机正常工作时转子绕组不起作用,在设计永磁电机时,可使转子绕组完全满足高起动转矩的要求,例如使起动转矩倍数由异步电机的1.8倍上升到2.5倍,甚至更大,较好地解决了动力设备中“大马拉小车”的现象。 3. 工作温升 由于异步电机工作时,转子绕组有电流流动,而这个电流完全以热能的形式消耗掉,所以在转子绕组中将产生大量的热量,使电机的沮度升高,影响了电机的使用寿命。 由于永磁电机效率高,转子绕组中不存在电阻损耗,定子绕组中较少有或几乎不存在无功电流,使电机温升低,延长了电机的使用寿命。 4.对电网运行的影响 因异步电机的功率因数低,电机要从电网中吸收大量的无功电流,造成电网、翰变电设备及发电设备中有大量无功电流,进而使电网的品质因数下降,加重了电网及枪变电设备及发电设备的负荷,同时无功电流在电网、翰变电设备及发电设备中均要消耗部分电能,造成电力电网效率变低,影晌了电能的有效利用。同样由于异步电机的效率低,要满足翰出功率的耍求,势必要从电网多吸收电能,进一步增加了电两能量的损失,加重了电网负荷。 在永磁电机转子中无感应电流励班,电机的功率因数高,提高了电网的品质因数,使电网中不再需安装补偿器。同时,因永磁电机的高效率,也节约了电能。
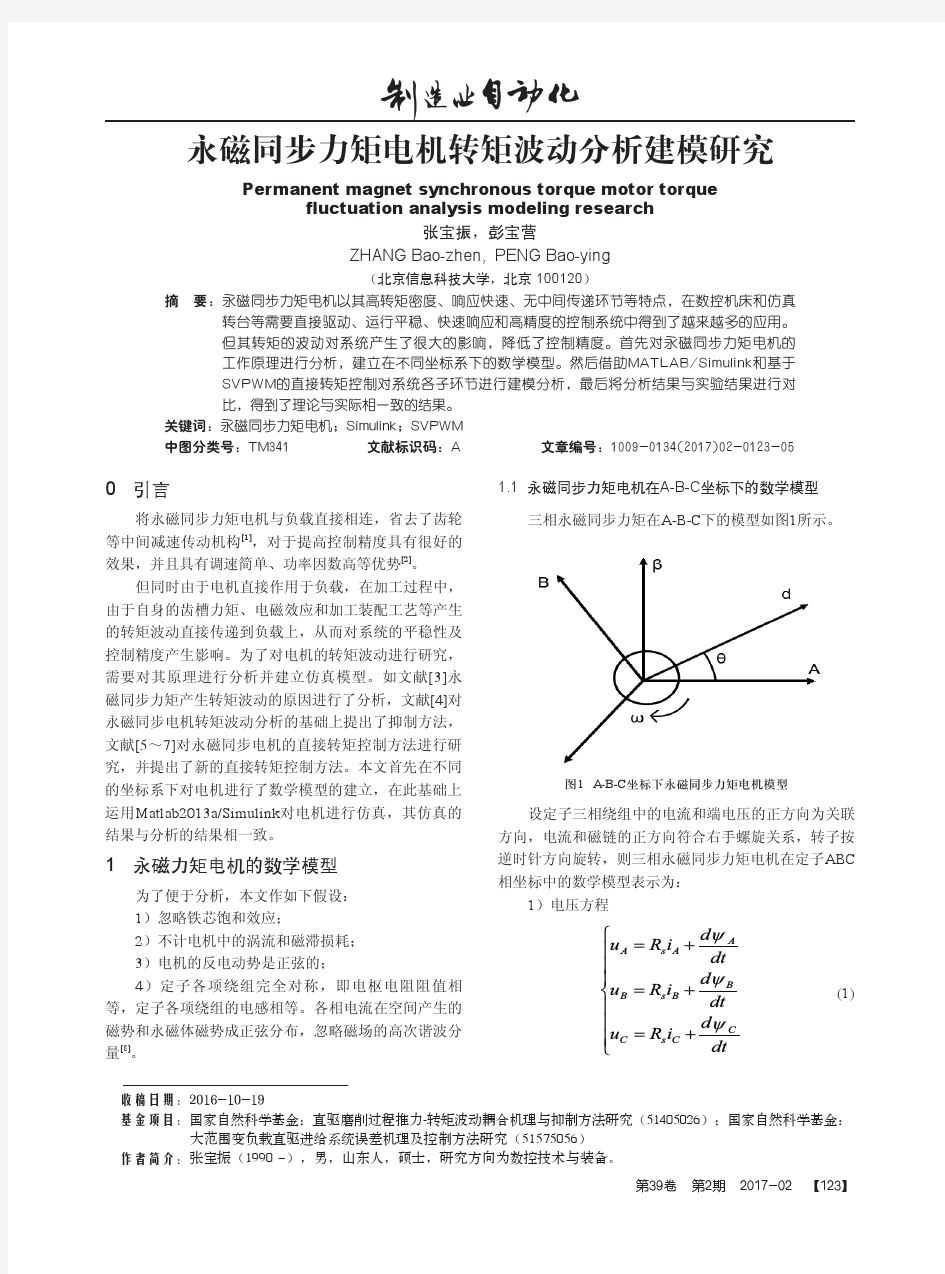
(一) P M S M 的数学模型 交流电机是一个非线性、强耦合的多变量系统。永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。为了简化永磁同步电机的数学模型,我们通常做如下假设: 1) 忽略电机的磁路饱和,认为磁路是线性的; 2) 不考虑涡流和磁滞损耗; 3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波; 4) 驱动开关管和续流二极管为理想元件; 5) 忽略齿槽、换向过程和电枢反应等影响。 永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下: (l)电机在两相旋转坐标系中的电压方程如下式所示: 其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。 若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。 (2)d/q 轴磁链方程: 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项 倍。 (3)转矩方程: 把它带入上式可得: 对于上式,前一项是定子电流和永磁体产生的转矩,称为永磁转矩;后一项是转 子突极效应引起的转矩,称为磁阻转矩,若Ld=Lq ,则不存在磁阻转矩,此时,转矩方程为: 这里,t k 为转矩常数,32 t f k p ψ=。 (4)机械运动方程: 其中,m ω是电机转速,L T 是负载转矩,J 是总转动惯量(包括电机惯量和负载惯量),B 是摩擦系数。 (二) 直线电机原理 永磁直线同步电机是旋转电机在结构上的一种演变,相当于把旋转电机的定子和动子沿轴向剖开,然后将电机展开成直线,由定子演变而来的一侧称为初级,转子演变而来的一侧称为次级。由此得到了直线电机的定子和动子,图1为其转变过程。
齿槽转矩测试的必要性和方法 近年来随着永磁材料的发展,永磁电机成了电机行业的新宠。然而在永磁电机中,齿槽转矩的存在给电机的控制性能造成了很大的影响,那齿槽转矩到底是怎么产生的?我们又该怎么去测呢? 玩过永磁电机的朋友都有过类似的经历:我们在电机掉电的情况下去转电机的转子,发现会有一种卡顿的感觉,而不像传统直流电机那么顺畅的就能把转子徒手转起来。这种卡顿其实就是因为永磁电机存在齿槽转矩。永磁电机内部结构图如图1所示,齿槽转矩是永磁电机的固有的特征之一,它是在电枢绕组不通电的状态下,由永磁体产生的磁场同电枢铁心的齿槽作用在圆周方向上产生的转矩。它其实是永磁体与电枢齿之间的切向力,使永磁电动机的转子有一种沿着某一特定方向与定子对齐的趋势,试图将转子定位在某些位置,由此趋势产生的一种振荡转矩就是齿槽转矩。 图1 永磁同步电机结构图 齿槽转矩会使电机产生振动和噪声,出现转速波动,使电机不能平稳运行,影响电机的性能。在变速驱动中,当转矩脉动频率与定子或转子的机械共振频率一致时,齿槽转矩产生的振动和噪声将被放大。齿槽转矩的存在同样影响了电机在速度控制系统中的低速性能和位置控制系统中的高精度定位。所以做永磁电机研发的工程师希望把自己做的电机的齿槽转矩降到最小,使用永磁电机的工程师则希望了解手上这台电机的齿槽转矩,从而去优化他的控制算法。 在国标GBT/ 30549-2014里对齿槽转矩的测试有了明确的定义:电机绕组开路时,电机回转一周内,由电枢铁心开槽,有趋于最小磁阻位置的倾向而产生的周期性力矩。齿槽转矩的测试方法常用的有:杠杆测量法、转矩仪法。杠杆测量法比较简单,测量精度比较差,所以主要用于对精度要求不高的场合。转矩仪法架构图如图2所示,由于伺服电机的齿槽转矩非常小,所以测试时需要以一个非常低的转速来带动未上电的被测电机来完成测试,
永磁同步电机研究 一、绪论 目前,在电动汽车电驱动系统中,永磁同步电动机(PMSM)系统以其高技、高控制精度、高转矩密度、良好的转矩平稳性及低振动噪声的特点受到国外电动汽车界的高度重视,是更具竞争力的电动汽车驱动电机系统。而且,中国拥有占世界80%储量的稀土资源,发展永磁电机作为电动汽车牵引电机具有得天独厚的优势。 PMSM:permanent magnet synchronous motor 是指根据电机的反电动势进行区分定义的电机:正弦反电势的永磁同步电机。以前采用的交流传动需要一个变速齿轮机构来将电机的转距传递到轮轴上,而采用永磁同步电机可以将电机整体地安装在轮轴上,形成整体直驱系统,即一个轮轴就是一个驱动单元,省去了一个齿轮箱 优点: (1)PMSM起动牵引力大 (2)PMSM本身的功率效率高以及功率因素高; (3)PMSM直驱系统控制性能好; (4)PMSM发热小,因此电机冷却系统结构简单、体积小、噪声小; (5)PMSM允许的过载电流大,可靠性显著提高; (6)在高速范围中电机噪声明显降低; (7)系统传动损耗明显降低,系统发热量小; (8)系统采用全封闭结构,无传动齿轮磨损、无传动齿轮噪声,免润滑油、免维护; (9)整个传动系统重量轻,簧下重量也比传统的轮轴传动的轻,单位重量的功率大; (10)由于电机采用了永磁体,省去了线圈励磁,理论可节能10%以上; (11)由于没有齿轮箱,可对装向架系统随意设计:如柔式装向架、单轴转向架,使列车动力性能大大提高。
二、电动汽车电机的性能要求: 汽车行驶的特点是频繁地启动、加速、减速、停车等。在低速或爬坡时需要高转矩,在高速行驶时需要低转矩。电动机的转速范围应能满足汽车从零到最大行驶速度的要求,即要求电动机具有高的比功率和功率密度。电动汽车电动机应满足的主要要求可归纳为如下10个方面: (1) 高电压。在允许的范围内,尽可能采用高电压,可以减小电动机的尺寸和导线等装备的尺寸,特别是可以降低逆变器的成本。工作电压由THS的274 V提高到THS B的500 V;在尺寸不变的条件下,最高功率由33 kW提高到50 kW,最大转矩由350 N"m提高到400ON"m。可见,应用高电压系统对汽车动力性能的提高极为有利。 (2)转速高。电动汽车所采用的感应电动机的转速可以达到8 000一12 000 r/min,高转速电动机的体积较小,质量较轻,有利于降低装车的装备质量。(3)质量轻,体积小。电动机可通过采用铝合金外壳等途径降低电动机的质量,各种控制装置和冷却系统的材料等也应尽可能选用轻质材料。电动汽车驱动电动机要求有高的比功率(电动机单位质量的输出功率)和在较宽的转速和转矩范围内都有较高的效率,以实现降低车重,延长续驶里程;而工业驱动电动机通常对比功率、效率及成本进行综合考虑,在额定工作点附近对效率进行优化。(4)电动机应具有较大的启动转矩和较大范围的调速性能,以满足启动、加速、行驶、减速、制动等所需的功率与转矩。电动机应具有自动调速功能,以减轻驾驶员的操纵强度,提高驾驶的舒适性,并且能够达到与内燃机汽车加速踏板同样的控制响应。 (5)电动汽车驱动电动机需要有4一5倍的过载,以满足短时加速行驶与最大爬坡度的要求,而工业驱动电动机只要求有2倍的过载就可以了。 (6)电动汽车驱动电动机应具有高的可控性、稳态精度、动态性能,以满足多部电动机协调运行,而工业驱动电动机只要求满足某一种特定的性能。 (7)电动机应具有高效率、低损耗,并在车辆减速时,可进行制动能量回收。 (8)电气系统安全性和控制系统的安全性应达到有关的标准和规定。电动汽车的各种动力电池组和电动机的工作电压可以达到300 V以上,因此必须装备高压保护设备以保证安全。
永磁式直流力矩电动机是属于直流伺服电机的一类,被广泛应用于高速定位系统、低速大扭矩转速控制系统、最佳扭矩在高速度的定位,速度,或张紧系统。 1、直流力矩电机的特点: ?外形为扁平的盘型,直径达而长短; ?可以为理想的定位和速度控制系统提供超低转速和高扭矩,或高的响应速度和最佳转矩; ?无框安装模式和可选的大的转矩范围; ?高转矩惯量比,快速启动/停止和高加速度; ?高转矩功率比,低功率输入要求; ?低电气时间常数为优良的命令响应所有运行速度; ?线性转矩响应输入电流和速度,没有死角; ?长期运行可靠性; ?精度高,即使在极低转速也无需齿轮系统; ?运行安静、平稳 ?设计紧凑、适应性强; ?可按要求设计包括永磁材料,叠片槽数,铁芯厚度,供电电压等。 2、直流力矩电机的主要名词解释、及与一般直流电机的区别: 1. 主要名词解释: 1、峰值堵转转矩:直流力矩电动机受永磁材料去磁限制的最大电流时,所获得的有效转矩, 一般表示为Mf,单位为N.m; 2、峰值堵转电压:直流力矩电机产生峰值堵转转矩时施加在电机两端的电压,一般表示为Uf, 单位为V; 3、峰值堵转电流:直流力矩电机产生峰值堵转转矩时的电枢电流,一般表示为If,单位为A; 4、峰值堵转控制功率:直流力矩电动机产生峰值堵转转矩时的控制功率,一般表示为Pf,单 位为W; 5、连续堵转转矩:直流力矩电机在某一堵转状态下其稳定温升不超过允许值,并可以长期工 作,此状态下产生的转矩被称为连续堵转转矩,一般表示为Mn,单位为N.m; 6、连续堵转电压:直流力矩电机产生连续堵转转矩时施加在电机两端的电压,一般表示为Un, 单位为V; 7、连续堵转电流:直流力矩电机产生连续堵转转矩时的电枢电流,一般表示为In,单位为A; 8、连续堵转控制功率:直流力矩电动机产生连续堵转转矩时的控制功率,一般表示为Pn,单
极槽配合对永磁同步电机性能的影响 摘要:永磁同步电机由于具有结构简单、体积小、效率高、功率因数高、转动惯量小、过载能力强,运行可靠等特点,在家用电器、医疗器械和汽车中得到广泛使用。永磁同步电机的齿槽转矩会引起输出转矩的脉动和噪声,不平衡径向电磁力则是电机的主要噪声源。本文着重研究极槽配合对永磁同步电机性能的影响,主要包括齿槽转矩和径向电磁力两个方面。详细介绍了齿槽转矩和径向电磁力的相关原理,并通过仿真对8极9槽和8极12槽两种极槽配合的电机进行分析比较,验证了相关的理论的正确性,最后得出电机设计中应综合考虑齿槽转矩、径向电磁力等相关因素合理选择极槽配合。 关键词:极槽配合;齿槽转矩;永磁同步电机;径向力 Influence of Pole-Slot Combination on The Performance of Permanent Magnet Synchronous Motor Abstract: Permanent magnet synchronous motor has simple structure, small volume, high efficiency, high power factor, small moment of inertia, strong overload capacity, reliable operation, widely used in household appliances, medical equipment and vehicles. Cogging torque will cause output torque ripple and noise of PMSM ,And unbalanced radial electromagnetic force is the main reason of noise of motor. In this paper,we focuses on the research of pole-slot combination effects on the performance of PMSM, including two aspects:the cogging torque and radial electromagnetic force. The relevant principles of the cogging torque and radial electromagnetic force were introduced in detail, and through the simulation of 8 poles 9 slots and 8 poles 12 slots motors,the two kinds of pole-slot combination motor were analyzed and compared, verified the related theory.Finally, we conclude that the cogging torque and radial electric force and so on related factors should be considered into the motor design when selecting reasonable pole-slot combination. Key words: pole-slot combination; cogging torque;PMSM; radial force 1引言 永磁同步电机结构简单、体积小、效率高、功率因数高、转动惯量小、过载能力强,运行可靠,且其
第五章永磁同步电机直接转矩控制及控制性能研究 矢量控制和直接转矩控制是交流电机的两种高性能控制策略,在永磁同步电机驱动控制中的应用与研究己受到众多学者的广泛关注。为了能够更好研究永磁同步电机的控制性能,提高永磁同步电机调速系统的动静态性能,本章针对永磁同步电机直接转矩控制系统,从空间电压矢量出发,在第四章建立永磁同步电机不同的坐标系下的数学模型的基础上,研究永磁同步电机直接转矩控制和空间电压矢量调制直接转矩控制的理论和实现方法,并进行仿真实验研究,分析控制策略的正确性 [24][30] 。 本文研究的转鼓实验台的恒转矩控制方式和惯量模拟控制方式,均采用空间电压矢量调制直接转矩控制策略对交流测功机(即永磁同步电机进行模拟加载。 5.1 永磁同步电机直接转矩控制基本理论 5.1.1 永磁同步电机在x 、y 坐标系下的数学模型 将永磁同步电机在同步旋转坐标系中磁链、电流和电压矢量关系表示在图5-1(即图4-1中所示,图中定义δ为转矩角,即定子磁链和转子磁链之间的夹角。d 、q 为与转子磁场速度 r ω同步旋转的坐标系,d 轴指向转子永磁磁链f ψ方向;x 、y 为与定子磁场速度e ω同步旋 转的坐标系,x 轴指向定子磁链s ψ方向。假设x 轴超前d 轴时转矩角为正,在忽略定子电阻的情况下,转矩角即为功角。当电机稳态运行时,定、转子磁链都以同步转速旋转。因此,在恒定负载的情况下转矩角为恒定值。当电机瞬态运行时,转矩角则因定、转子旋转速度不同而不断变化[31][32]。
A 图5-1 永磁同步电机坐标系 由图5-1可推导出转矩角的表达式为( tan /(tan 1 1 f d d q q sd sq i L i L ψ ψ
调速永磁同步电动机的电磁设计与磁场分析 1 引言 与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率 密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航 天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。 随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电 动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速 永磁同步电动机也应运而生。变频调速永磁同步电动机可分为两类,一类是反电 动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另 一类是两种波形都是正弦波的一般意义上的永磁同步电动机。这类电机通常由变 频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。 本文使用Ansoft Maxwell 软件中的RMxprt 模块进行了一种调速永磁同步电 动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D 中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行 了瞬态特性分析。 2 调速永磁同步电动机的电磁设计 2.1 额定数据和技术要求 调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子 冲片设计、定子绕组的设计、永磁体的设计等。通过改变电机的各个参数来提高 永磁同步电动机的效率η、功率因数cos ?、起动转矩st T 和最大转矩max T 。本例所设计永磁同步电动机的额定数据及其性能指标如下: 额定数据 数值 额定功率 N 30kw P = 相数 =3m 额定线电压 N1=380V U 额定频率 =50Hz f 极对数 =3p 额定效率 N =0.94η 额定功率因数 N cos =0.95? 绝缘等级 B 级 计算额定数据:
摘要 直接转矩控制是近年来应用比较广泛的一种控制策略。它的优点包括控制原理直观明了,操作简单快捷,具有良好的转矩响应性。而另一方面,永磁同步电机因为其运行的可靠性高,结构简单,所以在交流伺服电机中所处的地位越来越高。基于这一发展趋势,本文重点研究了把直接转矩控制应用在永磁同步电机上的控制效果。为了更好地分析永磁同步电机直接转矩控制,本文介绍了直接转矩控制的原理和它的优缺点,还有永磁同步电机的分类、结构及其在不同坐标系下的数学模型。然后借助MATLAB 中的Simulink功能,搭建永磁同步电机直接转矩控制系统的模型,对仿真结果进行分析归纳,最后得出结论。结论表明,永磁同步电机直接转矩控制具有较好的转矩响应,基本能实现对永磁同步电机的快速可靠的控制,但是低速性能不佳,得不到快速的转矩响应。这就确定了改善永磁同步电机直接转矩控制在低速时候的转矩响应将成为今后的发展趋势。 关键词:直接转矩控制;永磁同步电机;仿真
目录 摘要Ⅰ 第一章选题背景 1.1 研究背景及研究意义 3 1.2 相关领域的发展情况 3 1.3 研究的主要内容 4 第二章直接转矩控制概述 2.1 直接转据控制原理 4 2.2 直接转矩控制的发展方向 5 2.3 本章小结 6 第三章永磁同步电机概述 3.1 永磁同步电机的分类 6 3.2 永磁同步电机的结构 7 3.4 本章小结 8 第四章永磁同步电机直接转矩控制 4.1 永磁同步电机直接转矩控制原理 8 4.2 逆变器与开关表 10 4.3 定子磁链与电磁转矩的测定 11 4.4 本章小结 13 第五章永磁同步电机直接转矩控制仿真 5.1 仿真软件 13 5.2 仿真模型 14 5.3 仿真结果分析 17 5.4 本章小结 18 第六章结论19参考文献20 第一章选题背景
永磁同步电机齿槽转矩分析与控制总结 齿槽转矩是永磁电机固有的特性,它会使电机产生转矩脉动,引起速度波动、振动和噪声,当转矩脉动的频率与电机定、转子或端盖的固有频率相等时,电机产生共振,振动和噪声会明显增大。齿槽转矩也会影响电机的低速性能和控制精度。 1.齿槽转矩定义:转子在旋转过程中,定子槽口引起磁路磁阻变化, 转子磁通与定子开槽引起的气隙磁导(磁阻的倒数)交互作用在圆周方向产生的转矩为齿槽转矩。 齿槽转矩也称定位转矩,它的产生来自永磁体与电枢齿间的切向力,使转子有一种沿着某一特定方向与定子对齐的趋势. 2.齿槽转矩影响因素:齿槽形状、磁极极弧系数、永磁体形状、极槽配合、气隙、磁场强度等. 3.齿槽转矩每机械周期齿槽转矩周期数:N co=LCM(Z,2p),Z为槽数,2p为极数,LCM表示最小公倍数. 4.齿槽转矩一个周期机械角度为:θsk=360°/N co 5.齿槽转矩基波频率为: f c=N co n s=N co f p n s=f p (r/s)为同步转速,p为极对数,f为电源频率. 6.齿槽转矩的通用表达式: T co=∑T n ∞ n=1 sin(nN coθ+?n) n=1时对应的齿槽转矩的基波幅值为T1, θ为转子机械角位置. 7.齿槽转矩的计算: 齿槽转矩可以通过计算响应区域的磁能积得到,T ec=dW c dθ ,式中,磁共能: W c=∫Bθ2 2μ0 d(υr)(J) 对气间隙区域应用麦克斯韦张力张量法计算齿槽转矩,有: T ec=L L gμ0∫rB n S g B t ds,
L为有效转子长度;L g为气隙长度;μ0为自由空间磁导率;r为虚拟半径;B n和B t为气间隙磁通的径向和切向分量;S g为气隙表面积. 8.降低齿槽转矩措施: 1)无槽绕组:采用无槽绕组可以完全消除齿槽转矩,但气隙磁通密度会降低, 需要增加永磁体的材料(高度). 2)定子斜槽:通常定子斜槽等于一个槽距,可将齿槽转矩降为零,但定子斜槽 减小电动势,电机性能会下降,转子偏心情况,斜槽有效性降低。 θco=θsk=2πN co 当定子叠片斜过这个角度时,齿槽转矩为: T sk= 1 θsk ∫T co θsk (θ)dθ= 1 θsk ∑∫T n 2π N co ∞ n=1 sin(nN coθ+?n)dθ= 1 θsk ∑[ ?T n cos(nN coθ+?n) nN co ] 2π N co ∞ n=1 =0 3)改变定子槽型:a.齿顶开辅助槽,辅助槽也产生齿槽转矩,辅助槽产生的齿槽 转矩与原定子槽产生的齿槽转矩会相互叠加,产生合成齿槽转矩,其相位差: φnc=2π s(N n+1) ,N n为每齿开的辅助槽数,谐波次数为(N n+1)及其倍数的齿槽转矩相互叠加后不为零且频率提高,而合成转矩的其他高次谐波则被消除。为使辅助槽能有效减小齿槽转矩,需要遵循一定的原则 (HCF[(N n+1),N p]=1, HCF表示最大公约数,N p为1个齿距内的周 期数,N p=2p HCF[Z,2p] ),否则齿槽转矩可能反而会增大。定子齿开槽对电机性能有一定影响,会降低反电动势. b.减少槽口的宽度,一般情况齿槽转矩随着槽口宽度增大而增大,优化槽宽与 槽距的比值可降低齿槽转矩,但转矩波动可能会增大. c.闭口槽,设计闭口槽时需要正确设计相邻齿的连接桥,连接桥太厚,定子槽 漏磁太大而不可接受. d.不等齿宽槽.
永磁式直流力矩电动机 1.概述 永磁式直流力矩电动机是一种特殊的控制电机,是作为高精度伺服系统的执行元件,适应大扭矩、直接驱动系统,安装空间又很紧凑的场合而特殊设计的控制电机。 实际上,许多自动控制系统控制对象的运动速度相对是比较低的,比如:地面搜索雷达天线的控制系统;陀螺平台的稳定系统;单晶炉的旋转系统;精密拉丝系统等等,在这些控制系统中如果采用齿轮减速驱动,将会大大降低系统的精度,增加系统的惯量和反应时间,加大传动噪声。如果采用力矩电机组成的直接驱动系统,就能够在很宽的范围内达到低速平稳运行,大大提高系统的精度,降低系统的噪声。还有一些负载运行在很低的速度,接近堵转状态,或是负载轴端要加一定的制动反力矩,这些场合,都适合采用力矩电机。 2.性能特点 永磁式直流力矩电动机的性能有以下特点: 2.1高的转矩惯量比 一方面力矩电机设计成在一定体积下输出尽可能大的转矩,另一方面,实现无齿轮传动,从负载轴端看,折算到负载轴上转矩与惯量之比比齿轮传动大一个齿轮传动比的倍数,使系统加速能力大大增加。 2.2高的藕合刚度 力矩电机直接装置于负载轴或轮毂上,没有齿隙,没有弹性变形,传动链短,使系统伺服刚度得以提高。 2.3快的响应速度 力矩电机具有高转矩惯量比,使电机机械时间常数比较小,同时,电气时间常数也很小,保证了在宽广运行速度下都能快速响应,大大提高系统的硬度和品质。 2.4高的速度和位置分辩率 与齿轮或液压传动系统相比,没有齿隙引起的零点死区,减少了传动链 中传动部件的非线性因素,使系统的分辩率仅取决于误差检测元件的精度。 2.5高线性度
转矩的增长正比于输入电流,不随速度和角位置而变化,转矩~电流 特性基本通过零点,非线性死区很小。 2.6结构紧凑 典型的力矩电机设计成分装式的薄环形状(由定子、转子、电刷架三大 件组成),安装时占用较小的空间,尤其在对轴向尺寸、体积、重量要求严格的场合,具有较大的结构适应性和灵活性。 3. 性能指标说明 3.1峰值堵转转矩 电机受磁钢祛磁条件限制及设计中考虑最佳性能时,施加峰值电流电机处于瞬间堵转状态,此时输出的转矩为峰值堵转转矩。 3.2峰值堵转电流 对应峰值堵转转矩时输入的最大电流。 3.3峰值堵转电压 对应于产生峰值堵转电流时的电枢电压。 3.4连续堵转转矩 电机受发热、散热条件及电机绝缘等级条件限制,允许的长期堵转输出的转矩。 3.5连续堵转电流 对应连续堵转转矩时施加的电流。 3.6连续堵转电压 对应于产生连续堵转电流时的电枢电压。 3.7最大空载转速 力矩电机在空载时加以峰值堵转电压所达到的稳定速度。 4.电动机的工作特性 永磁式直流力矩电动机的工作特性见下图:
永磁同步电动机的分类和特点 一,永磁同步电动机的特点 永磁同步电动机结构简单、体积小、重量轻、损耗小、效率高,和直流电机相比,它没有直流电机的换向器和电刷等缺点。和异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;但它与异步电机相比,也有成本高、起动困难等缺点。和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机矢量控制系统引起了国内外学者的广泛关注。 我国是盛产永磁材料的国家,特别是稀土永磁材料钕铁硼资源在我国非常丰富,稀土矿的储藏量为世界其他各国总和的4倍左右,号称“稀土王国”。稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。因此,对我国来说,永磁同步电动机有很好的应用前景。 二,永磁同步电动机的分类 永磁同步电动机的转子磁钢的几何形状不同,使得转子磁场在空间的分布可分为正弦波和梯形波两种。因此,当转子旋转时,在定子上产生的反电动势波形也有两种:一种为正弦波;另一种为梯形波。这样就造成两种同步电动机在原理、模型及控制方法上有所不同,为了区别由它们组成的永磁同步电动机交流调速系统,习惯上又把正弦波永磁同步电动机组成的调速系统称为正弦型永磁同步电动机(PMSM)调速系统;而由梯形波(方波)永磁同步电动机组成的调速系统,在原理和控制方法
上与直流电动机系统类似,故称这种系统为无刷直流电动机(BLDCM)调速系统。 永磁同步电动机转子磁路结构不同,则电动机的运行特性、控制系统等也不同。根据永磁体在转子上的位置的不同,永磁同步电动机主要可分为:表面式和内置式。在表面式永磁同步电动机中,永磁体通常呈瓦片形,并位于转子铁心的外表面上,这种电机的重要特点是直、交轴的主电感相等;而内置式永磁同步电机的永磁体位于转子内部,永磁体外表面与定子铁心内圆之间有铁磁物质制成的极靴,可以保护永磁体。这种永磁电机的重要特点是直、交轴的主电感不相等。因此,这两种电机的性能有所不同。 三无刷直流电动机(BLDCM) 1,BLDCM研究现状 永磁无刷直流电动机与传统有刷直流电动机相比, 是用电子换向取代 原直流电动机的机械换向, 并将原有刷直流电动机的定转子颠倒(转子采用永磁体)从而省去了机械换向器和电刷,其定子电流为方波, 而且控制较简单, 但在低速运行时性能较差, 主要是受转矩脉动的影响。 引起转矩脉动的因素很多, 主要有以下原因: (1)电枢反应引起的转矩脉动 减弱或克服这种原因造成转矩脉动采用的方法是适当增大气隙, 设计 磁路时使电机在空载时达到足够饱和, 以及电机选择瓦形或环形永磁 体径向励磁结构等。 (2)电流换相引起的转矩脉动
喏名L乃农别名阄2018,45 (2)研究与设计I EMCA 永磁同步力矩电机的多领域联合设计与分析 李天宇,代颖,赵剑飞,郑江 (上海大学机电工程与自动化学院,上海200072) 摘要:基于Ansys、MATLAB/Simulink等仿真软件,对永磁同步力矩电机的工作特性进行多领域分析。 以抑制转矩脉动和振动为目标对电机进行电磁仿真和模态分析;仿真电机转速的转子力和转 子结构形变;校核技术指标要求的最高转速工作点的运行可靠性;基于Ansys Simplorei■平台对电机控制系统 的转矩特性进行仿真;分析电机加工工艺对电机性能的。系发,寻求的电 机设计方案。 关键词:永磁同步力矩电机;电磁场"动力学特性"联合仿真 中图分类号:TM 351 文献标志码:A 文章编号:1673-6540(2018)02-0097-05 Multi-Physical Field United Designand Analysis of Permanent Magnet Synchronous Torque Motor* LI Tianyu,DAI Ying,ZH AO (School of M echatronics E n g in eerin g an d A u to m atio n,S hanghai U n iv ersity,S hanghai 200072, C h in a) Abstract: Based o n Ansys,MATLAB/Simulink simulation software,the working characteristics of a permanent magnet synchronous torque motor o n formulti-physical field were analyzed. The motor electromagnetic simulation and modal to suppress t he torque ripple and vibration; Simulate the centrifugal stress and rotor structure deformation of rotor in highest no load speed was analyzed. Check the technical index requirements of the r speed running point; United design the torcque characteristics of motor control system based on Ansys Simplorer platform. Analyze the i nfluences of the processing technology in motor performance,and sought the optimal design scheme of motor from the aspects of overall system. Key words :permanent magnet synchronous torque motor ;electromagnetic feld;dynamic characteristic ;united design 0引言 力矩电机电机和驱动电机发展成的电机,其直接拖动负载运行,同时制的制进行转。永磁同步 力矩电机转矩特性,同 、机特性与特性好、运行可靠、振动小等优点,机床、电等需要平运行的场多的[1_2]。永磁同步力矩电机通常工作转状态下,甚天一转。由于作用于,所以对其转矩的平稳性要求,转矩的波动对系统。的永磁同步力矩电机年研究的热点,对永磁力矩电机进行设计 及要电机的动力学特性。本文基于A n sy s、M A T L A B/S im u lin k等仿真软件,对 永磁同步力矩电机进行多领域分析,电机系 的可靠运行,从系发,寻求的电机 *基金项目:国家自然科学基金-青年科学基金项目(51007050);台达环境与教育基金会《电力电子科教发展计划》资助项目 (D R E G2016015) 作者简介:李天宇(1995—),男,硕士研究生,研究方向为电机设计和多物理场分析。 代颖(1980—),女,博士,副教授,研究方向为电机振动噪声及多物理场分析。(通讯作者) 97
永磁同步/异步电机的性能,你知道多少? 时间:2017-03-18 06:25:32 来源:空压机网性质:转载作者:空压机网【推荐给朋友】 永磁同步电机与异步电机相比,具有明显的优势,它效率高,功率因素高,能力指标好,体积小,重量轻,温升低,技能效果显著,较好地提高了电网的品质因素,充分发挥了现有电网的容量,节省了电网的投资,它较好地解决了用电设备中“大马拉小车”现象。 1. 效率及功率因素
异步电机在工作时,转子绕组要从电网吸收部分电能励磁,消耗了电网电能,这部分电能最终以电流在转子绕组中发热消耗掉,该损耗约占电机总损耗的20~30%,它使电机的效率降低。该转子励磁电流折算到定子绕组后呈感性电流,使进人定子绕组中的电流落后于电网电压一个角度,造成电机的功率因数降低。另外,从永磁同步电机与异步电机的效率及功率因数曲线(图1)可以看出,异步电动机在负载率(=P2/Pn)<50%时,其运行效率和运行功率因数大幅度下降,所以一般都要求其在经济区内运行,即负载率在75%-100%之间。
图为永磁同步电动机与异步电动机的效率和功率因数 a. 异步起动永磁同步电动机 b.异步电动机 永磁同步电机在转子上嵌了永磁体后,由永磁体来建立转子磁场,在正常工作时转子与定子磁场同步运行,转子中无感应电流,不存在转子电阻损耗,只此一项可提高电机效率4%~50%。由于在水磁电机转子中无感应电流励磁,定子绕组有可能呈纯阻性负载,使电机功率因数几乎为1.从永徽同步电机与异步电机的效率及功率因数曲线(图1)可以看出,永磁同步电机在负载 率>20%时,其运行效率和运行功率因数随之变化不大,且运行效率>80%。 2. 起动转矩 异步电机起动时,要求电机具有足够大的起动转矩,但又希望起动电流不要太大,以免电网产生过大的电压降落而影响接在电网上的其他电机和电气设备的正常运行。此外,起动电流过大时,将使电机本身受到过大电做力的冲击,如果经常起动,还有使绕组过热的危险。因此,异步电机的起动设计往往面临着两难选择。 永磁同步电机一般也采用异步起动方式,由于永磁同步电机正常工作时转子绕组不起作用,在设计永磁电机时,可使转子绕组完全满足高起动转矩的要求,例如使起动转矩倍数由异步电机的1.8倍上升到2.5倍,甚至更大,较好地解决了动力设备中“大马拉小车”的现象。 3. 工作温升
基于ANSOFT的永磁同步伺服电机齿槽转矩分析 第32 卷第4 期2014 年07 月佳木斯大学学报( 自然科学版) Journal of Jiamusi University ( Natural Science Edition) Vol.32 No.4 July 2014 文章编号: 1008 -1402( 2014) 04 -0559 -04 基于ANSOFT 的永磁同步伺服电机齿槽转矩分 析 1 2 1 黄金霖,易靓,曹光华 ( 1.安徽机电职业技术学院电气工程系,安徽芜湖241000; 2.江西理工大学电气工程与自动化学院,江西赣州341000) ① 摘要: 齿槽转矩是永磁电机的固有属性,引起电机的转矩波动,产生振动和噪声.为减小齿槽转矩,提高永磁伺服电机的控制精度,在研究永磁电机齿槽转矩产生机理的基础上,根据永磁电机齿槽转矩的解析式,研究定子齿部开辅助槽和转子磁极偏移对永磁电机齿槽转矩的影响; 利用有限元软件ANSOFT,建立36 槽8 极永磁伺服电机的有限元分析模型,计算不同尺寸辅助槽和磁极偏心距离时的齿槽转矩,分析辅助槽尺寸和磁极偏心距离对齿槽转矩的影响.研究结果表明,合理的辅助槽尺寸和磁极偏心距离可有效削弱永磁伺服电机的齿槽转矩.关键词: 齿槽
转矩; 磁极偏心; 辅助槽; 永磁电机 中图分类号: TM303 文献标识码: A 随着矢量控制算法、电力电子器件和计算机控制技术的不断发展,永磁伺服电机的应用越来越广.在数控机床、小型机器人、机械传动设备以及混合电动汽车等领域,永磁伺服电机已经代替传统的异步电机和直流电机成为许多领域必不可少的传[1], 动设备. 永磁伺服电机结构与普通异步电机相比,转子永磁体取代了传统的转子绕组,转子永磁体的存在,使得电机的效率和功率密度高; 与此同时,转子永磁体与定子槽相互作用,产生齿槽转矩,使得电机转矩波动增加,产生振动与噪声,影响伺服电机的控制精度.齿槽转矩是永磁电机特有的属性,因此,怎样减小永磁电机的齿槽转矩成为相关专家学者研究[2] 的重点之一. 其中,μ0 是空气磁导率. ( 2) 以及气隙磁密随着电机定转根据式( 1) 、 子相对位置角和沿气隙切向不同位置分布的解析表达式,得到齿槽转矩的表达式为: T cog = - 1 α
(一) PMSM 的数学模型 交流电机是一个非线性、强耦合的多变量系统。永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。为了简化永磁同步电机的数学模型,我们通常做如下假设: 1) 忽略电机的磁路饱和,认为磁路是线性的; 2) 不考虑涡流和磁滞损耗; 3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波; 4) 驱动开关管和续流二极管为理想元件; 5) 忽略齿槽、换向过程和电枢反应等影响。 永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下: (l)电机在两相旋转坐标系中的电压方程如下式所示: d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ?=+-????=++?? 其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。 若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。 cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ?? ?-????? ??=--- ? ???? ???? ?+-+? ? (2)d/q 轴磁链方程: d d d f q q q L i L i ψψψ=+???=?? 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项
在各类驱动电机中, 永磁同步电机能量密度高, 效率高、体积小、惯性低、响应快, 有很好的应用前景。永磁电动机既具有交流电动机的无电刷结构、运行可靠等优点, 又具有直流电动机的调速性能好的优点, 且无需励磁绕组, 可以做到体积小、控制效率高, 是当前电动汽车电动机研发与应用的热点。 永磁同步电动机( PMSM)系统具有高控制精度、高转矩密度、良好的转矩平稳性以及低噪声的特点, 通过合理设计永磁磁路结构能获得较高的弱磁性能, 提高电动机的调速范围, 因此在电动汽车驱动方面具有较高的应用价值。 作为车辆电驱动系统的中心环节, 驱动电机的总体性能是设计研制技术的关键之一。根据车辆运行的特殊环境以及电驱动车辆自身的特点, 对驱动电机的技术要求主要是: ( 1)体积小、重量轻; 有较高的功率和转矩密度; ( 2)要求在宽速域范围内, 电动机和驱动控制器都有较高的效率; ( 3)有良好的控制性能以及过载能力, 以提高车辆的起动和加速性能。 永磁同步电机的功率因数大, 效率高, 功率密度大, 是一种比较理想的驱动电机。但正由于电磁结构中转子励磁不能随意改变, 导致电机弱磁困难, 调速特性不如直流电机。目前, 永磁同步电机理论还不如直流电机和感应电机完善, 还有许多问题需要进一步研究, 主要有以下方面。 1) 电机效率: 永磁同步电机低速效率较低, 如何通过设计降低低速损耗, 减小低速额定电流是目前研究的热点之一。 2)提高电机转矩特性 电动车驱动电机要求低速大转矩且有一定的高速恒功率运行范围, 所以相应控制策略的研究也主要集中在提高低速转矩特性和高速恒功率特性上。 1.低速控制策略: 为了提高驱动电机的低速转矩,一般采用最大转矩控制。早期永磁同步电机转子采用表面式磁钢, 由于直轴和交轴磁路的磁阻相同, 所以采用 id= 0 控制。控制命令中直轴电流设为 0, 从而实现最大转矩控制。随着同步电机结构的发展, 永磁同步电机转子多采用内置式磁钢, 利用磁阻转矩增加电机的输出转矩。id= 0 控制电机电枢电流的直轴分量为 0, 不能利用电机的磁阻转矩, 控制效果不好。目前, 永磁同步电机低速时常采用矢量控制, 包括气隙磁场定向、转子磁链定向、定子磁链定向等。 2.高速控制策略: 为了获得更宽广的恒功率运行范围, 永磁同步电机高速运行通常采用弱磁控制。另外, 在电机采用低速转矩控制和高速弱磁控制的同时, 还要考虑如何