第14卷 第4期
2006年8月
光学精密工程
O ptics and Precisio n Enginee ring
V ol.14 N o.4 Aug.2006
收稿日期:2005-10-14;修订日期:2006-05-16. 基金项目:国家863项目(No.863-2-2-4-9B )
文章编号 1004-924X (2006)04-0662-05
磁悬浮控制力矩陀螺高速转子的优化设计
韩邦成1
,虎 刚2
,房建成1
,
(1.北京航空航天大学仪器科学与光电工程学院,北京100083;
2.北京控制工程研究所,北京100080)
摘要:介绍了一种磁悬浮控制力矩陀螺(CMG )的结构,其中陀螺转子的额定角动量为200N ms 。利用多学科设计优化软件iSIG H T 及有限元分析软件A N SYS ,以质量为优化目标,以静力学、动力学和其他要求同时作为约束条件,对永磁偏置混合磁轴承支承的5自由度高速盘形转子(额定转速为20000rpm )进行了优化设计。通过优化设计,其静强度安全系数由原来的2.39提高到2.63,提高了10%;转子质量由15.032kg 减小为13.972kg ,减少了7.1%。为满足控制系统对共振频率的要求,转子的弹性一阶共振频率为1313Hz (动力学)。关 键 词:控制力矩陀螺;陀螺转子;混合磁轴承;优化设计;有限元法中图分类号:V 241.5 文献标识码:A
Optimization design of magnetic suspended gyroscope rotor
HAN Bang -cheng 1,H U Gang 2,FA NG Jian -cheng 1
(1.B eijing University o f Aeronautics &Astronautics ,Beijing 100083,China ;
2.B eijing Institute o f Control E ngineering ,Beijing 100080,China )
A bstract :The structure of a Co ntro l M omentum Gy roscope (CM G )w as introducecl ,in w hich g y ro -sco pe ro to r w ith the rating rotatio n speed of 20,000r /min and rating ang ular m omentum of 200N ms is suppor ted by pe rmanent bias active mag netic bearing.The softw are of m ultidisciplinary design optimiza tion (iSIG H T )and the so ftw are of Finite Element Analy sis Softw are (ANSYS )w ere applied to optimize the ro to r to reduce the m ass of rotor.The re sults of optimization indicate that the mass of the rotor is decreased from 15.032kg to 13.973kg (is reduced by 7.1%),the safety factor is in -creased from 2.39to 2.63(is increased by 10%),the first resonance frequency is 1313H z com pare to original design results.
Key words :Control M oment Gy roscope (CMG );gy roscope rotor ;permanent bias magne tic bearing ;
optimizatio n desig n ;Finite Element M ethod (FEM )
1 引 言
随着空间技术的发展,空间站、大型观测卫星等航天器成为世界各国空间战略的重要组成部
分,同时也带动了控制力矩陀螺(Contro l Mo -m ent Gy ro scope ,简称CMG )的研究高潮。CM G 是空间站等长期运行的大型航天器(也包括机动灵活等小型航天器)实现姿态控制的关键执行机构[1],它由陀螺转子系统(高速旋转的陀螺转子、支承系统、陀螺房、高速驱动电机)和框架系统(框架体、力知电机、滑环、角位置传感、支承系统)等组成。航天器姿态控制系统对CMG 的基本要求是寿命长、体积小、质量轻、功耗低。根据陀螺转子的支承方式,CMG 可以分为机械轴承和磁轴承支承两类,如天空实验室[2]
(Skylab )和国际空
间站(ISS )[3]
上的CMG 采用机械轴承,但机械轴承的摩擦和润滑是其需要解决的关键问题,也是其出现故障的主要原因。与机械轴承相比,磁轴承具有无接触、无需润滑、高转速、低功耗、长寿
命、高精度及对振动可实现主动控制等优点[4-7]
,使其在CMG 中得到应用。如和平号空间站(1987年~2002年)首次将磁轴承技术应用于CM G [8],在寿命方面体现了磁轴承技术的优势(在轨寿命为15年),但也存在一定的问题(刚度低、整体功耗大、可靠性较低),其主要原因是当时的磁轴承技术还不成熟。但时至今日,磁轴承技
术已广泛应用于各个领域[9-11]
。
本文介绍了一种基于混合磁轴承技术的CM G ,说明了陀螺转子系统的结构及其工作原理。由于磁悬浮陀螺转子是CMG 的核心部件,它的质量、静力学和动力学性能直接影响系统的整体性能(如系统的功耗、振动情况及可靠性等),因此需要对陀螺转子进行优化设计。本文利用多学科设计优化软件iSIG H T 和有限元分析软件ANSYS ,以高速陀螺转子为分析对象,以质量为优化目标,在满足静力学和动力学约束条件下进行了优化。
2 磁悬浮CM G 系统的结构
CMG 的主要功能是在陀螺转子高速旋转状
态下,通过框架伺服电机控制陀螺房进动以提供
陀螺力矩来控制航天器的姿态。
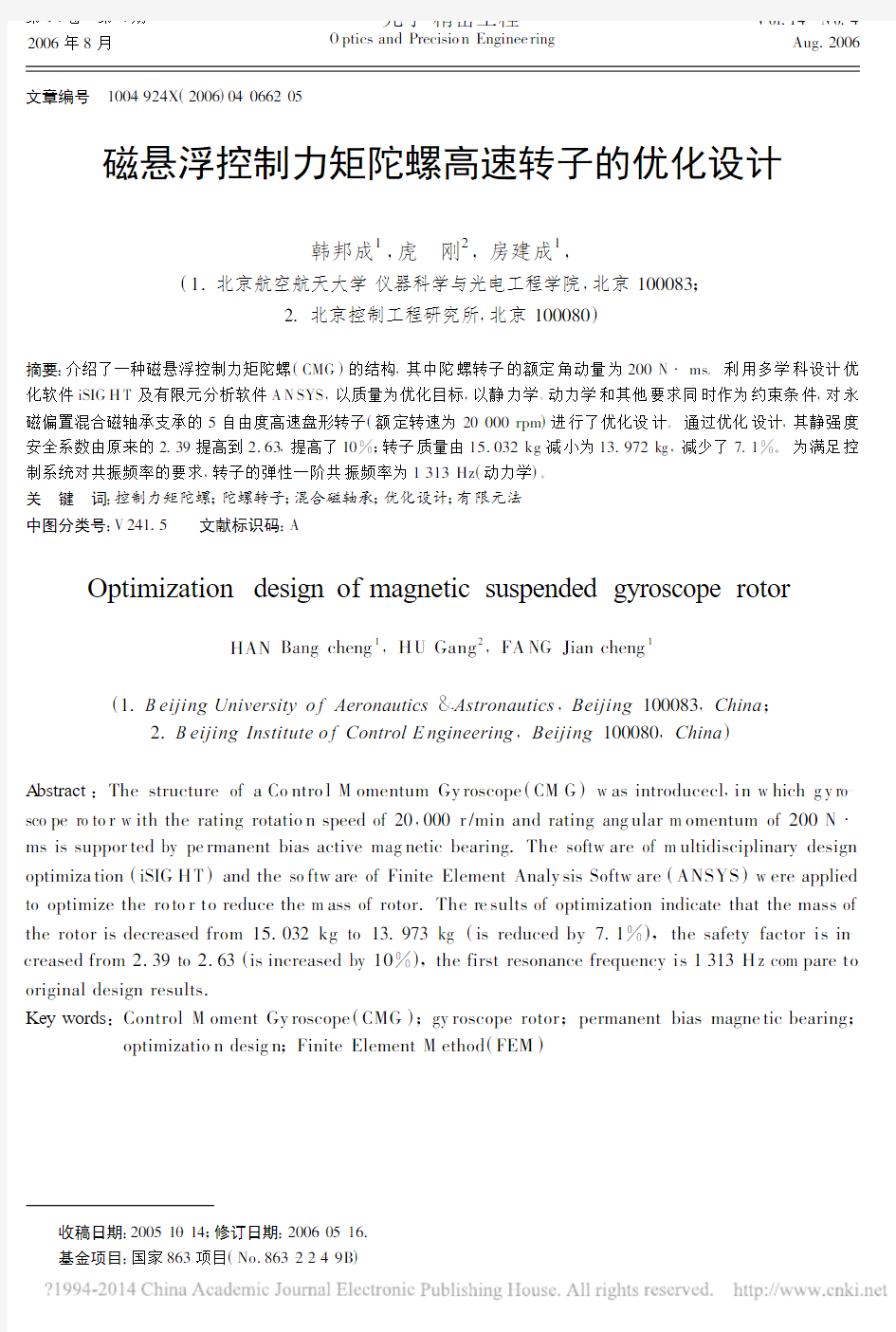
本文所研究的磁悬浮CMG 的主要结构如图1所示,主要由提供角动量的高速陀螺转子(额定转速20000r /min )、飞轮电机、径向混合磁轴承(控制转子径向位移和陀螺效应)、轴向磁轴承(控制转子轴向位移)、径向位移传感器(探测转子径向位移及其振动信号)、轴向位移传感器(探测转子轴向位移及其振动信号)和陀螺房(主要作用是作为支承结构;维持内部真空,减小空气阻力;与框架系统接口)等组成。
图1 磁悬浮CM G 转子系统结构示意图Fig.1 Constructio n of mag netic suspension co nt rol
mo me ntum gy ro sco pe
3 磁悬浮CM G 转子的优化设计
3.1 优化设计方案
由于航天器对CM G 质量、体积和功耗等都有严格要求,而陀螺转子是其关键元件,所以需要对其结构进行优化。设计要求是:在额定转速下达到设计角动量(即转子达到指定的转动惯量),同时满足强度、刚度、可靠性等方面的要求,并且希望以尽可能小的质量、尺寸达到尽可能大的转动惯量。因而,其结构总体设计的出发点与一般承力、传力是完全不同的。
从结构优化设计的角度来说,磁悬浮CM G 转子的优化设计是一个有约束、非线性优化问题。考虑到约束条件中存在弹性一阶共振频率等与结构设计参数呈比较复杂关系的因素,这里采用直接搜索法中的序列二次规划法(N LPQ L )进行优化设计。直接搜索法的特点是直接比较和利用各设计点的目标函数和约束函数本身的数值来进行搜索,不需要考虑那些函数的导数,这类方法逻辑结构简单,直观性强,易于程序化。
663
第4期
韩邦成,等:磁悬浮控制力矩陀螺高速转子的优化设计
在初步设计阶段,综合考虑了陀螺转子的设计转速、转动惯量、几何尺寸对系统等效质量、电机设计方案、磁轴承设计方案、传感器安装位置及尺寸、陀螺房设计等各种影响因素,最终确定了陀螺转子的基本结构和轴向长度。如图1所示,考虑到磁悬浮陀螺转子上需要安装飞轮电机转子、径向磁轴承和轴向磁轴承转子,而根据电机和磁轴承设计方案,这三个部件已经初步确定了设计方案,因此转子芯轴和飞轮中间辐板已没有进一步优化设计的余地,所以只能针对转子的轮缘进行优化设计。
综合考虑各方面因素,应用NLPQL对于陀螺转子优化设计问题的数学描述如下:
搜寻设计变量:
x=(R0,R1,D),(1)目标函数:
M=F(X)=F(R0,R1,D),(2)满足以下约束条件:
g j(x)=0;j=1,…,m e,(3)
g j(x)≥0;j=m e+1,…,m,(4)
x l≤x≤x u.(5)其中,式(1)为设计变量,R0表示轮缘内半径,R1表示轮缘外半径,D表示轮缘厚度;式(2)为目标函数,即当陀螺转子质量M取最小值时设计结果最优;式(3)为等式约束;式(4)为不等式约束;式(5)为边界约束。陀螺转子的优化设计需要满足以下约束条件:
(1)效能约束:陀螺转子组件在额定转速(20000r/min)下需要提供200N m s的角动量,此时,其极转动惯量J=0.09549kg m2;
(2)几何约束:为限制陀螺房和框架系统的体和质量,要求轮缘内、外半径R0,1≤130mm,同时轴向尺寸能满足电机和磁轴承安装尺寸的要求;
(3)强度约束:为使系统具有较高的可靠性,要求转子在额定转速下的最大等效应力σmax,eq< [σ]/2,即安全系数在2以上;
(4)刚度约束:要求陀螺转子在工作转速范围内为刚性转子,则需要其弹性一阶共振频率大于转子最高工作转速的1.4倍。对于最高转速为24000r/min的陀螺转子,并考虑控制系统的需要,则要求转子组件的弹性一阶共振频率f> 1
000H z;
(5)形状:扁平转子,且要有利于磁悬浮陀螺转子的控制(即抑制陀螺效应),要求转子极惯性矩/赤道惯性矩之比q在1.4~2之间。
(6)强制约束:与轴向、径向磁轴承和电机相关的几何尺寸,如飞轮辐盘的厚度、轮缘的最小内径,飞轮轴向尺寸等。
根据以上设计目标及约束条件,并结合优化设计软件和有限元分析软件,在初步设计的基础上,采用NLPQ L对磁悬浮控制力矩陀螺的转子进行优化设计。
图2 陀螺转子组件优化设计流程
Fig.2 O ptimizatio n f low cha rt of ro to r design
3.2 磁悬浮陀螺转子的优化结果
根据电磁设计的要求,陀螺转子体选用低碳钢材料—合金钢S06。陀螺转子组件的优化流程如图2所示,首先建立转子组件的静力学和动力学模型,通过iSIGH T软件集成两种分析模型,并利用N LPQ L算法在满足约束条件下获得一组最优的设计,使质量最小。
陀螺转子组件优化设计结果如表1所示。与原设计方案相比,通过优化设计使转子质量减小了1.051kg(约减小了7.1%);而按合金钢S06的曲服强度(σ0.2=980M Pa)计算,其安全系数由原来的2.39提高到2.63,提高了10%;极转动惯量基本为0.0955kg m2;其他优化结果也满足条件约束要求。
设计变量的优化过程曲线如图3所示,最优计算结果出现在第13步。
664 光学 精密工程 第14卷
图3 设计变量优化过程曲线
Fig.3 O ptimizatio n curv e of de sig n variable
表1 陀螺转子优化设计结果
T ab.1 O ptimal desig n r esults o f gy ro sco pe r oto r
参数
原设计方案优化设计方案
轮缘厚度D (mm )5040轮缘内半径R 0(mm )93100轮缘外半径R 1(mm )120125极转动惯量J (kg m 2)
0.10190.955极惯性矩与赤道惯性矩之比q 1.63 1.61最大等应力SEQ V (M Pa )410373一阶共振频率f (Hz )13471313转子质量M (kg )
15.023
13.972
最优计算结果下的陀螺转子在20000r /min 下的最大等应力云图如图4所示,最大等应力为373M Pa ,发生在转子中间辐板与中间芯轴相连接的位置
。
图4 陀螺转子在20000r /min 下的等应力云图Fig.4 F ly wheel r oto r stress contours at 20000r /min
在最优计算结果下,陀螺转子在磁轴承支承
下的一阶弹性固有振型如图5所示,模型中忽略了轴向磁轴承对一阶弹性振型的影响(经过有限元计算,轴向磁轴承对转子的一阶弹性固有振型
及固有频率影响很小),转子两端的径向磁轴承分
别等效为四个弹簧单元,取等效刚度系数为500N /mm ,其振型为转子芯轴与轮盘的相对弯曲,对
应的固有频率为1313H z 。
图5 陀螺转子的弹性一阶固有振型
Fig.5 T he first o rder vibration mode of gy roscope ro to r
4 设计变量对陀螺转子性能的影响
分析
为对陀螺转子进行初步方案的设计和优化计算结果有一个定性的认识和指导,本文还研究了设计变量R 0、R 1和D 对转子质量M 、一阶频率f 、最大等应力SEQV 等参数的影响。经有限元分析和计算,其中,只改变D ,保持R 0、R 1恒定的设计结果如图6所示,从图中可以看出,随着轮缘厚度D 的增加,除陀螺转子的弹性一阶固有频率f 单调降低外,转子的质量M 、极转动惯量J 、极转动惯量与赤道转动惯量之比q 、最大等应力S E -QV 都单调增加。
图6 转子相关参数与轮缘厚度的关系曲线
Fig.6 Rela tionship curve of between rim thickness
and parameter s o f ro tor
同样也可以分析在几何尺寸约束范围内,只改变轮缘内半径R 0或外半径R 1对其他参数的影响。
665
第4期
韩邦成,等:磁悬浮控制力矩陀螺高速转子的优化设计
轮缘内半径R0↑,M↓,最大等应力SEQV ↓,极转动惯量J↓,极转动惯量与赤道转动惯量之比q↓,弹性一阶固有频率f↑。
轮缘外半径R1↑,M↑,最大等应力SEQV ↑,极转动惯量J↑,极转动惯量与赤道转动惯量之比q↑,弹性一阶固有频率f↓。
5 结 论
(1)本文给出了一种额定角动量为200N m s的磁悬浮CMG,在初步设计方案的基础上,以陀螺转子为分析对象,综合考虑了磁悬浮转子的强度(可靠性)、一阶共振频率、形状、转动惯量等多因素的要求,以最小质量为优化目标进行了综合优化设计;
(2)建立了陀螺转子的静力学和动力有限元模型,给出了优化设计后的静力学和模态分析结果;
(3)通过综合优化设计,在满足系统要求的约束条件下,使陀螺转子质量减小了7.1%,安全系数提高了10%;
(4)分析了设计变量R0、R1和D对转子质量M、弹性一阶共振频率f、最大等应力SEQV、转动惯量J、以及极转动惯量与赤道转动惯量之比q 等参数的影响情况,对设计方案有一定指导意义。
参考文献:
[1] F AN Y H,F A NG J CH.Experime ntal resea rch on the nuta tional stability of magnetically suspended momentum
w heel in co ntrol moment g y ro scope(CM G)[J].N inth International S ym posium Magnetic Bearings,August, 2004,USA.116-121.
[2] T he P roceeding s o f the co mmittee to inv estiga te the SK Y LA B CM G No.2o rbital anomalies[C].Guidance and Con-
trol Division Astrionics L aboratory.NA SA,N79-76857,Jan.18,1974:1-9.
[3] BU RT R R,L OF FI R W.F ailur e analysis of inte rnational space station contro l mo ment g y ro[C].The Proceeding
10th European S pace Mechanisms and Tribology S y mposium,San Sebastian,S pain,24-26.September,2003:13-
25.
[4] DA-CHEN P.Magnetic bearing system design f or enhanced stability[M].U niver sity o f M ary land College Park.
1994:128-130.
[5] 俞文伯,栾胜,房建成.CM G磁悬浮转子系统的模型与控制律[J].航空学报.2003,24(6):541-545.
Y U W B,LU A N SH,F AN G J CH.M odel and co ntrol law of CM G active mag netic bearing ro tor[J].Chinese J ournal o f Aeronautics,2003,24(6):541-545.(in Chinese)
[6] 魏彤,房建成.磁悬浮控制力矩陀螺的动框架效应及其角速率前馈控制方法的研究[J].宇航学报,2005,26(1):
19-23.
W EI T,F AN G J CH.M o ving-gimbal effects and angular r ate feedfo rwa rd co ntrol in magnetically suspended ro to r system of CM G[J].J ournal of Astronautics,2005,26(1):19-23.(in Chine se)
[7] 陈立志.磁悬浮轴承在高速旋转机械上的应用及一种混合径向磁悬浮轴承的设计[J].光学精密工程,1994,2(4):
101-108.
CH L ZH.A pplicatio n of magnetic f loa ting bearing in hig h speed ro tary machinery and desig n o f a mix ing radial mag netic floating bea ring[J].Optic and P recision Engineering,1994,2(4):101-108.(in Chinese)
[8] SEM YO N OV Y P.T he beginning of the M IR station active o per atio n[C].T he38th congress o f the international
astronautical.October10-17,1987/Brighon,United K ingdom:21-24.
[9] A N A N D D K,KI RK J A,F ROM M ER D A.Desig n co nsider ation for a magnetically suspended f lyw heel ener gy
stor age sy stem[C].P roceedings of20th intersociety energy conversion engineering con f erence.Miami Beach,F L, Aug ust18-23,1985.
[10] HA GIW A RA S.Ro tational tests o f magnetically suspended fly wheel fo r spacecr aft(2nd repo r t)[R].JSM E N o.
810-4(1981).P P.97-69.
[11] 韩邦成,李也凡,贾宏光,等.主动磁轴承力及其线性化参数的计算[J].光学精密工程,2003,11(4):65-69.
HA N B CH,L I Y F,JI A H G,et al.Calculatio n of for ce s and linear pa rameters o f activ e mag ne tic bearing[J].
Optic and P recision Engineering,2003,11(4):65-69.(in Chinese)
作者简介:韩邦成(1974-),男,博士后,主要研究方向为磁悬浮飞轮、磁悬浮控制力矩陀螺与多学科设计优化。E-mail: habang cheng@y https://www.doczj.com/doc/ed12063791.html,
666 光学 精密工程 第14卷
magnetic suspension technique 本文介绍磁悬浮主轴系统的组成及工作原理,提出了一种在常规PID基础上的智能PID控制器的新型数字控制器设计。其核心部件是TI公司的TMS320LF2407A,设计了五自由度磁悬浮主轴系统的硬件总体框图。用C2000作为开发平台,设计在常规PID基础上的智能PID控制器。理论分析结果表明:这种智能PID控制器能实现更好控制效果,达到更高的控制精度要求。1 引言 主动磁悬浮轴承(AMB,以下简称磁轴承)是集众多门学科于一体的,最能体现机电一体化的产品。磁悬浮轴承与传统的轴承相比具有以下优点:无接触、无摩擦、高速度、高精度。传统轴承使用时间长后,磨损严重,必须更换,对油润滑的轴承使用寿命会延长、但时间久了不可避免会出现漏油情况,对环境造成影响,这一点对磁悬浮轴承就可以避免,它可以说是一种环保型的产品。而且磁轴承不仅具有研究意义,还具有很广阔的应用空间:航空航天、交通、医疗、机械加工等领域。国外已有不少应用实例。 磁悬浮轴承系统是由以下五部分组成:控制器、转子、电磁铁、传感器和功率放大器。其中最为关键的部件就是控制器。控制器的性能基本上决定了整个磁悬浮轴承系统的性能。控制器的控制规律决定了磁轴承系统的动态性能以及刚度、阻尼和稳定性。控制器又分为两种:模拟控制器和数字控制器。虽然国内目前广泛采用的模拟控制器虽然在一定程度上满足了系统的稳定性,但模拟控制器与数字控制器相比有以下不足:(一)调节不方便、(二)难以实现复杂的控制、(三)不能同时实现两个及两个以上自由度的控制、(四)互换性差,即不同的磁悬浮轴承必须有相对应的控制器、(五)功耗大、体积大等。磁轴承要得到广泛的应用,模拟控制器的在线调节性能差不能不说是其原因之一,因此,数字化方向是磁轴承的发展趋势。同时,要实现磁轴承系统的智能化,显然模拟控制器是难以满足这方面的要求。因此从提高磁轴承性能、可靠性、增强控制器的柔性和减小体积、功耗和今后往网络化、智能化方向发展等角度,必须实现控制器数字化。近三十年来控制理论得到飞速发展并取得了广泛应用。磁悬浮轴承控制器的控制规律研究在近些年也取得了显著的进展,目前国外涉及到的控制规律有:常规PID和PD控制、自适应控制、H∞控制等,国内涉及到的控制规律主要是常规PID及PD控制和H∞控制,但H∞控制成功应用于磁悬浮轴承系统中的相关信息还未见报道。 从当前国内外发展情况来看,国外的研究状况和产品化方面都领先国内很多年。国外已有专门的磁悬浮轴承公司和磁悬浮研究中心从事这方面的研发和应用方面工作,如SKF公司、NASA等。其中SKF公司的磁轴承的控制器所用控制规律为自适应控制,其产品适用的范围:承载力50~2500N、转速1,800~100,000r/min,工作温度低于220℃。NASA是美国航天局,他们开展磁悬浮研究已有几十年,主要用于航天上,研究领域包括火箭发动机和磁悬浮轨道推进系统(2002年9月已完成在磁悬浮轨道上加2g加速度下可使火箭的初始发射速度达到643~965km/h 。目前国内还没有一家磁悬浮轴承公司,要赶上国外磁悬浮轴承发展水平,必须加大人力、物力等方面的投入。国内对磁悬浮轴承控制器的控制规律研究起步较晚,当前使用较多的都是常规PID和PD控制,实际电路中也有使用PIDD的。控制精度相对来说不是很高,而且每个系统都必须对应相应的KP,KI,KD,调节起来很麻烦,使用者同样会觉得很不方便。为了使磁悬浮轴承产品化,必须解决上述问题,任何人都能很方便的使用,必须把它做成象“傻瓜型设备一样的产品”,这就得首先解决控制器的问题。解决此问题就是使控制器智能化。智能化的内容包括硬件的智能化和软件的智能化。本文仅讨论控制器在控制算法方面的智能化问题以及实现手段,可为最终解决磁悬浮轴承智能化奠定
1 引言 近些年来,磁浮列车以其高速、节能、安全、舒适、环保等优点日益受到人们越来越多的关注。目前德国和日本是世界上磁浮列车研究最多的国家:德国已经研制了tr系列吸力型磁浮列车,并在埃姆斯兰建造了大型试验用的tve试验线;日本也研制了mlu系列斥力型磁浮列车和hsst系列吸力型磁浮列车,并修建了山梨试验线。我国也在积极开展这方面的研究工作,上海已从德国引进了tr08型磁浮列车,并已投入了商业运行,同时也拉开了消化吸收其先进技术的序幕。在磁浮列车运行系统中,合理有效的牵引供电系统是实现磁浮列车高速可靠运行的关键之一,故而成为本文的主要研究对象。 2 磁浮列车牵引供电系统概况 磁浮列车按照动力源(直线电动机)定子的长短相应可分为短定子直线电动机驱动的磁浮列车和长定子直线电动机驱动的磁浮列车。短定子直线电动机是将定子绕组安装在车体的底部,通过向磁浮列车提供变压变频的电源,由车上的短定子产生行波磁场; 轨道上安置结构较为简单的长转子,这种结构多用于直线异步牵引电动机的驱动系统。由于列车通过受流器供电,而高速受流困难使列车运行速度、异步电机的功率因数及效率均受到限制,因此该系统仅用于低速小功率短距离的电力牵引。长定子直线同步电动机驱动的磁浮列车的底部安置有直线电机的转子,整条轨道上安装同步电机的长定子绕组。磁浮列车内部对转子的供电简单,没有高速受流的困难。采用这种直线同步电动机驱动,适合于高速、大功率、长距离的电力牵引。德国和日本均采用这种系统。德国研制了常导吸浮式磁浮列车:由车上常导电流产生的电磁吸引力吸引轨道下方的导磁体,使列车浮起。常导电流比较容易获得,通常由蓄电池或感应式发电线圈等设备产生电流,供给同步直线电动机的转子。但常导系统电磁吸引力相对较小,列车悬浮高度约10mm,故对控制精度的要求很高。日本研制的超导斥浮型磁浮列车是由车上强大的超导电流产生极强的电磁场,该电磁场相对线路侧墙上的8字形导电环高速移动,使导电环感应出强大的环流,在8字形下半环中形成推斥磁场,而上半环中则形成吸力磁场,使列车悬浮。该悬浮系统是一个无需反馈控制的稳定系统,而且悬浮高度可在10cm左右,从而使控制相对简单。 3 上海高速磁浮列车的牵引供电系统[1] 上海运营的高速磁浮列车是从德国引进的tr08型磁浮列车,采用长定子直线同步电动机和常导吸浮式系统。其牵引供电系统如图1所示,由高压变压器(110kv/20kv)、输入变压器、输入变流器、逆变器和输出变压器等主要部件构成。 磁悬浮列车牵引供电系统从110kv网压经高压变压器变为20kv,再由输入变压器和输入变流器变为±2500v的直流电压。从直流环节来的直流电压,由三相三点式逆变器产生可变频率(0~300hz)、可变幅值(0~×4.3kv)、可调相角(0~360°)的三相交流电。磁悬浮列车的牵引变流器有两种工作模式:
手把手教你DIY磁悬浮 吊悬电路图 R3为距离调节,这个距离是有一定的大小,小到磁铁会吸住上面的铁芯,大到上面电磁铁没有力吸住下机的磁铁。 R4 是放大调节器,在PID中可看作P。 R5R6组成电压中线中。 距离调节,也可这样做:R3去掉不用,直接调节A放大器的中线电压。 R8,C1这个值要通过调试才能达到完美。这个可增加稳定性 这个3503磁感应器在电动摩托车车把找到的,线性的,当没有磁力线通过时输出为电压的一半。
3503放在线圈(线圈可以加铁芯)的下面中心点,这个放置有正反面之分。吊悬用强磁铁。 线圈的圈数和线直径大慨个数,没有算出要多少才可以,多圈几圈正常下多可以用单组电路(整个完整电路应有两组这样的电路) 电路分析: 这个电路中可分成几个部份 R2,R3,D1,C1组成稳压供给3503和中线电压取样 A放大器与R8,R7组成输入放大 因霍尔是放在磁场中间,和霍尔自身的工艺因素,所出输不一定刚好是电压的一半,所以放大器的中性电压一定要用R6来调节 R9,R10,C3,组成PID Q1,Q3,B放大器可看成一个放大器,R1是RF,这样就好理解了,D2,D3是保护Q1,Q3的。 R11,R12,Q2,Q4,C放大器这是一组约为1:1放大,正好与B放大输出成反相 也可这样来说,后级的电路是推勉放大器 如果不用R11,R12,Q2,Q4,C放大器,这个电路其实就是吊悬电路改变而来的 在调试中先试一组电路 当磁铁在线圈上方左右移动时,手能感觉到磁铁被电磁铁在上方一个位置中吸卡住(有点轻微,要认真去感觉),调节R6可改变吸卡的位置,
霍尔放在相对一组线圈中间,上下也要居中(这个很关健) 如果线圈的磁力够推动磁铁的话可以放在下面大磁铁中(这个看起比较好看),但初做这个还是先放在大磁铁上面,当然这个前提是下面的环形磁铁的磁力足以托起上面的悬磁铁一定距离,够放住线圈。左右线圈输出的磁性是想反的。对悬磁铁来说正好一个线圈是拉,一个线圈是推。 当悬磁铁向左漂移时,电磁铁会把它拉到右过来(一个推,一个拉),当悬磁向右漂移时,电磁铁也会把它拉到左过来,这样的结果会使悬磁铁居在两个线圈拉力的中间。上下两个线圈也是这个道理。
磁力悬浮器:玩儿的就是“气场”! chxmright发表于 2010-12-07 18:59 DIYer:J_Hodgie 制作时间:3-4小时 制作难度:★★★★☆ GEEK指数:★★★★☆ 这件小小的DIY作品向我们展现了一个磁力悬浮器是如何“神奇”地让各种物体漂浮在空中,而且仅仅利用了一个小小的磁铁而已哦~~简单易行,效果却是相当不凡的,一定能让围观者“大吃一斤”……
话说该神器和悬浮地球仪很神似~~但是我DIY的神器是电磁铁和永久磁铁配合的结果——这比简单的将几个永久磁铁捆绑了事,声称自己可以悬浮任何物体要高级多了,不是夸夸其谈,看我后续介绍吧。 我找来了一个微控制器(PLC或是单片机随你便)和一个红外传感器来侦查悬浮物的悬停高度,然后通过微处理器来设定电磁铁的电流值,从而让它乖乖地悬停在空中~ 当然咯,悬浮物的悬浮位置还是和悬浮物的重量与磁性大小有关滴。把物体放在磁铁和传感器之间时,我可以通过一个开关来侦测高度从而确定电流强度。 当物体悬浮时,物体的重力和磁铁对物体产生的吸引力是相等的,所以我们选择悬浮物体的时候一定要找使用非工业电磁铁,用较小的电磁力就可以摆平的物体啦~~而且这个小装置还能够进行动态调整以便物体保持完美的悬浮高度。 从前我总是被商店橱窗里的悬浮地球仪深深吸引,奈何钱包不鼓啊。何况那种玩意儿还非得捆绑销售那个悬浮物,而不能悬浮自己喜欢的物品! 因此呢,我决定自己利用磁铁DIY一个。先看看我的“神器”,酷吧? 双向电梯 ? 5 制作悬浮物 ? 6 飘起来向大家去炫耀吧 ?7 DIYer签到处
1 工具和材料 ○ATMega168微控制器○1个16-20MHz 晶体管○28针插座 ○双路全H桥集成电路卡○1个NPN型功率三极管○2个电磁铁 ○1个双色发光二极管 ○2个红外发光二极管 ○2个红外光敏二极管 ○1个5V稳压器
小学科学二年级下册第五单元第16课《制作磁悬浮笔架》 皇华小学备课组坚永芹 教材分析: 通过对本册第二单元磁铁的学习,学生已基本了解了磁铁的基本性质,也初步尝试了利用磁铁的性质制作指南针为人类服务。但是在真实的生活情景下,磁铁的性质还有哪些真实应用,利用磁铁的性质还可以进行哪些发明和创新呢?本可利用磁悬浮笔架这个技术与工程活动,让学生了解科学、技术与工程活动紧密结合,能够为生活带来更多的便利,为什会带来更多的进步。 教学目标: 1.能利用磁铁美工刀等材料和工具,在教师的指导下完成磁悬浮笔架的制作。 2.能对自己和他人的作品提出改进建议。 3.能如实讲述事实,当发现事实与自己原有的想法不同时,能尊重事实,养成用事实说话的意识。 4.了解到人类可以利用科技产品让生活环境得到改善。 教学重难点: 重点:探究磁悬浮实验的工作原理。 难点:利用磁悬浮实验的工作原理,完成磁悬浮笔架的制作。 活动准备:环形磁铁、纸盒、美工刀,双面胶、铅笔 教学过程: 一、问题与猜测 教师先演示"小猫钓鱼"的游戏(用磁铁吸引曲别针) ,让学生回忆学过的有关磁铁的知识,再展示磁悬浮地球仪和磁悬浮飞机等,激发学生探究其中原理的欲望。 师:同学们,我们知道了每块磁铁上都有两个磁极。不同的磁极靠近时会相互吸引,相同的磁极靠近时会相互排斥。这节课,我们就来利用磁铁间的这种奇妙的性质,制作一个可以悬浮的笔架。 (教师板书:制作磁悬浮笔架。) (设计意图:带领学生回顾已学知识。从学生喜欢的玩具人手,激发学生的学习兴趣,引导学生对悬浮现象进行猜测和探究。) 二、探究过程
(一)设计磁悬浮笔架 1、师提问:我们手中的铅笔可以飘浮在空中吗?谁能想到好方法?(学生积极回答。) 师:同学们的想法真棒。 (学生交流讨论,积极回答环形磁铁同学们能根据它联想到什么呢? 2、老师演示。我们可以先把假笔套在环形磁铁中,再把磁铁放在纸盒中,这样它们就会相互推开使铅笔悬浮在空中了。 3、(救师展示材料:环形磁铁、纸盒美工刀,双面胶、铅笔)师:哪位同学能说说这些工具的名称?(学生积极交流回答。) 师:哪位同学知道这些材料的作用? (学生小组内积极交流讨论。) 4、教师总结:美工刀可以用来切制纸盒;铅笔可以用来绘制线条:直尺可以用来测量物体的直径和厚度:纸盒可以用来做磁悬浮笔架的底座:双面胶可以用来固定位置。 (二)制作磁悬浮笔架 师:同学们,在开始制作前,老师遇到了一个难题.需要同学们一起帮忙解决:怎样能把磁铁牢固地固定在纸盒上呢? (学生积极讨论、汇报。) 师:可以用双面胶把磁铁粘在纸盒上,但是这个方法还不是太牢固。哪位同学还有其他的想法? (学生回答。) 师:我们可以先用直尺测量出环形磁铁的厚度和长度,再用铅笔在纸盒上绘制出宽度与环形磁铁厚度相同的、长度与纸盒相同的长方形,然后用直尺测量出环形磁铁的直径,用蜡笔在绘制的长方形两侧画出长度略小于环形碰铁直径的长方形,最后用美工刀将纸盒上绘制的4个长方形挖出来。 师提出活动要求: (1)学生小组内分工合作,互相配合。 (2)不能用美工刀嬉戏打闹,制作过程中要注意安全。 (3)安装磁铁时,,要注意磁铁的南北极方向。 (4)调试笔筒上两块磁铁间的位置,直至笔筒能悬浮。提示学生注意操作规范和安全。)学生开展实验活动,教师巡视并适时指导。 (设计意图:教师通过设置问题,发散学生思维;通过设计磁悬浮笔架的活动指向,培养
实验报告课程名称:工程电子场与电磁波指导老师:________熊素铭 ________ 实验名称:_ 磁悬浮_实验类型:动手操作及仿真同组学生姓名: 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1、观察自稳定的磁悬浮物理现象; 2、了解磁悬浮的作用机理及其理论分析的基础知识; 3、在理论分析与实验研究相结合的基础上,力求深化对磁场能量、电感参数和电磁力等知识点的理解。 二、实验内容 1、观察自稳定的磁悬浮物理现象 2、实测对应于不同悬浮高度的盘状线圈的激磁电流 3、观察不同厚度的铝板对自稳定磁悬浮状态的影响 实验原理 1、自稳定的磁悬浮物理现象 由盘状载流线圈和铝板相组合构成磁悬浮系统的实验装置,如图2-6所示。该系统中可调节的扁平盘状线圈的激磁电流由自耦变压器提供,从而在50 Hz正弦交变磁场作用下,铝质导板中将产生感应涡流,涡流所产生的去磁效应,即表征为盘状载流线圈自稳定的磁悬浮现象。
2、基于虚位移法的磁悬浮机理的分析 在自稳定磁悬浮现象的理想化分析的前提下,根据电磁场理论可知,铝质导板应被看作为完纯导体,但事实上当激磁频率为50 Hz时,铝质导板仅近似地满足这一要求。为此,在本实验装置的构造中,铝质导板设计的厚度b还必须远大于电磁波正入射平表面导体的透入深度d(b )。换句话说,在理想化的理论分析中,就交变磁场的作用而言,此时,该铝质导板可被看作为“透不过的导体”。 对于给定悬浮高度的自稳定磁悬浮现象,显然,作用于盘状载流线圈的向上的电磁力必然等于该线圈的重量。本实验中,当通入盘状线圈的激磁电流增大到使其与铝板中感生涡流合成的磁场,对盘状载流线圈作用的电磁力足以克服线圈自重时,线圈即浮离铝板,呈现自稳定的磁悬浮物理现象。现应用虚位移法来求取作用于该磁悬浮系统的电动推斥力。 首先,将图2-1所示盘状载流线圈和铝板的组合看成一个磁系统,则其对应于力状态分析的磁场能量 式中,I为激磁电流的有效值。其次,取表征盘状载流线圈与铝板之间相对位移的广义坐标为h(即给定的悬浮高度),则按虚位移法可求得作用于该系统的电动推斥力,也就是作用于盘状载流线圈的向上的电磁悬浮力 (2-1) 在铝板被看作为完纯导体的理想化假设的前提下,应用镜像法,可以导得该磁系统的自感为 (2-2) 式中,a——盘状线圈被理想化为单匝圆形线圈时的平均半径;N——线匝数;R——导线被看作圆形导线时的等效圆半径。从而,由稳定磁悬浮状态下力的平衡关系,即 式中,M ——盘状线圈的质量(kg);g——重力加速度(9.8 m/s2);进一步代入关系式(2-2),稍加整理,便可解出对于给定悬浮高度h的磁悬浮状态,系统所需激磁电流为 三、主要仪器设备 磁悬浮装置 铝板:b=14mm,b=2mm,γ=3.82E7 S/m 盘状线圈:N=250,R1=31mm,R2=195mm,h=12.5mm,M=3.1kg 自耦变压器:0~100V,0~30A,50Hz
关于磁悬浮电机的应用现状与发展趋势
————————————————————————————————作者:————————————————————————————————日期:
关于磁悬浮电机的应用现状与发展趋势 李宇佳 (北京交通大学,北京,100000) 摘要:本文概述了磁悬浮电机的原理及优点,重点介绍了磁悬浮风力发电机的结构和工作原理。并简述了磁悬浮电机当前的应用领域。最后本文展望了磁悬浮电机未来的发展方向。 关键词:磁悬浮电机;风力发电机 Developing Trends of Magnetically Levitated Electric Machines and Their Applications Li Yujia (Beijingjiaotong University,Beijing,100000) Abstract:In this paper, the principle and advantages of the agnetically Levitated Electric Machines are summarized. The structure and working principle of the magnetic levitation wind generator are introduced. The current application field of agnetically Levitated Electric Machines is briefly introduced. Finally, the future development direction of tagnetically Levitated Electric Machines is prospected. Key word:lagnetically Levitated Electric;Machines wind power generator 1 引言 传统的a电机是由定子和动子组成,定子与动子之间通过机械轴承联接或存在机 械接触,因此动子运动过程中存在机械摩擦。机械摩擦不仅增加动子的摩擦阻力,使运动部件磨损,产生机械振动和噪声,而且会造成部件发热,使润滑剂性能变差,严重的会使电机气隙不均匀,绕组发热,温升增大,从而降低电机效能,最终缩短电机使用寿命。磁悬浮电机是利用定子和动子励磁磁场之间“同性相斥,异性相吸”的原理使动子悬浮起来,同时产生推进力驱使动子在悬浮状态下运动。因此,定子与动子之间不存在任何机械接触,可以产生较高的加速度和减速度,机械磨损小,机械与电气保护容易,维护、检修和更换方便,适用于恶劣环境、极其洁净无污染环境和特殊需要的领域。磁悬浮电机的研究越来越受到科技工作者的 重视,其发展前景令人鼓舞。 2 磁悬浮轴承电机 为了克服传统旋转电机存在机械轴承和机械摩擦的不足,目前已研制出各种无接触式磁轴承,用来取代机械轴承。典型的磁悬浮轴承如径向磁轴承、径向推力磁轴承和轴向磁悬浮轴承,以及径向自由度可控的电磁悬浮轴承。 2.1 径向磁悬浮轴承 径向磁悬浮轴承是由两个径向磁化同轴空心圆柱组成,磁化方向相反。当两个磁化圆柱轴向重合、径向同心时,圆柱所受径向磁场推力为零。而当两个磁化圆柱发生轴线偏移时,由于圆柱之间气隙磁场极性相同产生不平衡排斥力使圆柱轴线趋于一致。这种径向磁轴承虽然能做到径向自动稳定,但磁轴承轴向不稳定,而且当轴线偏转时,角向稳定性也不好,因此用途有限。 2.2 径向推力磁悬浮轴承 径向推力磁悬浮轴承通常采用两个轴向磁化,而磁化方向相反(也可采用一个轴向磁化,而另一个径向磁化的同轴空心圆柱,但轴向错开一定位置,不仅能保持径向稳定性,而且提高了轴向和角向稳定性。 2.3 电磁悬浮轴承 这种多自由度电磁力控制的磁悬浮轴
一、混合控制背景 控制力矩陀螺(CMGs)与动量轮(MWs)都属动量交换装置,是航天器姿控系统采用的主要执行机构。动量轮能产生精确连续但幅值较小的力矩,通常应用于中小型高精度三轴稳定卫星。单框架控制力矩陀螺(SGCMGs)输出力矩大且控制效率高,适用于长寿命大型航天器,但其固有的构型奇异给操纵律设计带来了很大困难。另一类单框架变速控制力矩陀螺(VSCMGs)在仅姿控时没有奇异问题,但由于其结构和控制的复杂性,至今尚未应用于工程实际。鉴于SGCMGs和MWs在技术上都比较成熟,采用两者组成混合执行机构,可以取长补短,发挥各自的优势,共同实现航天器的高性能姿态控制。 二、混合控制研究进展 混合执行机构的概念提出较早。早在1973年就提出采用金字塔构型SGCMGs 和三个MWs共同进行大型太空望远镜姿态稳定控制的方案,在不考虑外干扰力矩时,仿真结果很好[1]。其后,文献[2]提出在航天器姿态机动控制中可用SGCMGs 进行姿态粗控,MWs进行姿态精确调整的方案,并设计了相应的控制器,取得了很好的效果。对于带有大型运动部件的卫星,文献[错误!未定义书签。]提出利用金字塔构型MWs进行本体姿态控制,而利用1个SGCMG补偿运动部件产生的干扰力矩,也得到了很好的仿真结果。在航天器能量姿态一体化控制中,也提出利用SGCMGs与MWs共同完成这一任务的方案[3,4]。由此可见,针对不同的航天任务,可对SGCMGs和MWs进行合理配置,以实现高性能的姿态控制。 实际上,仅利用SGCMGs进行航天器姿态跟踪时,现存的操纵律都会遇到一些问题:零运动操纵律无法避免显奇异点,且在SGCMGs构型接近奇异时,框架角速度解过大甚至无解;而鲁棒伪逆和广义鲁棒伪逆操纵律旧[5]都会导致力矩误差,使跟踪精度下降。因此可考虑利用SGCMGs和MWs组成的混合执行机构来解决这些问题。文献[6]基于姿态跟踪任务对混合执行机构奇异性进行分析的基础上,利用奇异值分解的方法对指令力矩进行了显示分配,将SGCMGs奇异时沿奇异方向的指令力矩分配给MWs。在对SGCMGs和MWs的指令力矩分配完成后再分别设计各自的操纵律。 虽然VSCMGs结构和控制的复杂性,至今尚未应用于工程实际,但文献[7]在理论上论证了其优越性(研究了使用飞轮和VSCMG的基于动量管理的IPACS问题,设计了使用飞轮和VSCMG角动量执行机构的基于动量管理的IPACS框架,得出基于动最管理的IPACS优于单独的IPACS,在同时完成姿态摔制和能量存储
关于磁悬浮电机的应用现状与发展趋势 李宇佳 (北京交通大学,北京,100000) 摘要:本文概述了磁悬浮电机的原理及优点,重点介绍了磁悬浮风力发电机的结构和工作原理。并简述了磁悬浮电机当前的应用领域。最后本文展望了磁悬浮电机未来的发展方向。 关键词:磁悬浮电机;风力发电机 Developing Trends of Magnetically Levitated Electric Machines and Their Applications Li Yujia (Beijingjiaotong University,Beijing,100000) Abstract:In this paper, the principle and advantages of the agnetically Levitated Electric Machines are summarized. The structure and working principle of the magnetic levitation wind generator are introduced. The current application field of agnetically Levitated Electric Machines is briefly introduced. Finally, the future development direction of tagnetically Levitated Electric Machines is prospected. Key word:lagnetically Levitated Electric;Machines wind power generator 1 引言 传统的a电机是由定子和动子组成,定 子与动子之间通过机械轴承联接或存在机 械接触,因此动子运动过程中存在机械摩擦。机械摩擦不仅增加动子的摩擦阻力,使运动部件磨损,产生机械振动和噪声,而且会造成部件发热,使润滑剂性能变差,严重的会使电机气隙不均匀,绕组发热,温升增大,从而降低电机效能,最终缩短电机使用寿命。磁悬浮电机是利用定子和动子励磁磁场之 间“同性相斥,异性相吸”的原理使动子悬浮起来,同时产生推进力驱使动子在悬浮状态下运动。因此,定子与动子之间不存在任何机械接触,可以产生较高的加速度和减速度,机械磨损小,机械与电气保护容易,维护、检修和更换方便,适用于恶劣环境、极其洁净无污染环境和特殊需要的领域。磁悬浮电机的研究越来越受到科技工作者的重视,其发展前景令人鼓舞。 2 磁悬浮轴承电机 为了克服传统旋转电机存在机械轴承和机械摩擦的不足,目前已研制出各种无接触式磁轴承,用来取代机械轴承。典型的磁悬浮轴承如径向磁轴承、径向推力磁轴承和轴向磁悬浮轴承,以及径向自由度可控的电磁悬浮轴承。 2.1 径向磁悬浮轴承 径向磁悬浮轴承是由两个径向磁化同 轴空心圆柱组成,磁化方向相反。当两个磁化圆柱轴向重合、径向同心时,圆柱所受径向磁场推力为零。而当两个磁化圆柱发生轴线偏移时,由于圆柱之间气隙磁场极性相同产生不平衡排斥力使圆柱轴线趋于一致。这种径向磁轴承虽然能做到径向自动稳定,但磁轴承轴向不稳定,而且当轴线偏转时,角向稳定性也不好,因此用途有限。 2.2 径向推力磁悬浮轴承 径向推力磁悬浮轴承通常采用两个轴 向磁化,而磁化方向相反(也可采用一个轴 向磁化,而另一个径向磁化的同轴空心圆柱,但轴向错开一定位置,不仅能保持径向稳定性,而且提高了轴向和角向稳定性。 2.3 电磁悬浮轴承 这种多自由度电磁力控制的磁悬浮轴
陀螺力矩到底是怎样一个力矩,它是怎样产生的 前几年开始学习陀螺问题。遇到最大的一个问题是:“陀螺力矩”。 网上查得:“对称轴高速旋转的转子当旋转轴在空间中改变方位时所表现出的抗阻力矩,通常称为陀螺力矩,国内外不少陀螺力学著作,都将陀螺力矩解释为刚体各组成质点的哥氏惯性力的主矩。” 清华大学《理论力学步进教程》的§13.6中是如下介绍的: 为了正确理解这段话的意思,应该先回顾一下质系的动量矩定理和赖柴尔定理。质系的动量矩定理说的是:“质系对固定点O 之动量矩O L 对时间的导数O dL dt ,等于作用于质系的外力F 对同一点的主矩 O M ”。赖柴尔定理说的是:“质系对某固定点的动量矩矢量端点的速度等于外力对该点的主矩;他是对质系的动量矩定理的一种几何解释。 其实赖柴尔定理只是对动量矩定理的某一方面(并不全面)的解释;例如:重力矩作用于高速旋转的陀螺,他将使陀螺加速倒下,然后时陀螺加速进动;或者使陀螺以速度O O M L Ω=(如果陀螺已有这一速度)进动。而赖柴尔定理则不顾陀螺是否具有这一速度,就硬说陀螺将以这一速度O O M L Ω=进动。(相当 于说,用重物拉伸弹簧时,不顾重物的重量和弹簧的弹性,立即使弹簧拉到一定长度,而不是不停地振动最后停在一定长度处。) 文章说转子以角速度Ω绕y 轴转动,说明转子受到的外力矩是右端向上抬,左端向下压的逆时针的力矩。即受到的外力矩是沿y 方向的。但是为了得出“转子同时作用于轴承上两个力F1’和F2’(即沿x 的反方向的)”的结论,却硬要抬出赖柴尔定理,说“作用于转子上的外力系对于O 点的主矩为uA (即沿x 的正方向)”。并且是逆着用赖柴尔定理,也就是说是用赖柴尔定理的逆定理(应称为逆命题)。以说明其阻碍了实际上并不存在的所谓“外力系的主矩”并说:“这一力矩是陀螺表现出的一种惯性阻抗力矩,称为陀螺力矩。” 实际上,将陀螺力矩解释为“刚体各组成质点的哥氏惯性力的主矩。”则很简单。仍以上图为例,如下图1所示:转子绕z 轴以角速度ω高速旋转,如图中红色箭头所示。这时,转子上所有质点都是绕转轴做圆周运动。当有外力迫使转轴以角速度Ω绕y 轴旋转时,如
2014年电子科技大学(第九届)电子设计竞赛试题 参赛注意事项 (1) 参赛队员认真填写参赛报名表,报名信息必须准确无误。 (2) 每队严格限制三人,开赛后不得中途更换队员和制作题目。 (3) 参赛队员可以借助互联网等工具进行辅助设计,但不得与其他参赛队进行 方案讨论和交流。 (4) 器件领取时间及地点:2014年清水河校区科研楼A431(5月17日、5月 18日9:00-12:00,15:00-18:00, 19:00-22:00) (5) 作品提交时间及地点:2014年6月8日在清水河校区科研楼A431(6月 8日9:00-12:00,15:00-17:00,19:00-22:00)提交作品,逾期提交即视为自动放弃比赛资格。提交时应包括:设计报告、制作实物。 简易磁悬浮控制装置(E 题) 一、任务 设计制作一个简易下推式磁悬浮及其控制装置。磁悬浮装置结构如下图所示(左图为正视图,右图为俯视图,俯视图中纸杯未画出)。环形磁铁A 位于最下方,用于提供主要磁力,四个线圈B 放在环形磁铁A 之上,当四个线圈通电后,产生磁力用于控制强磁铁C ,,使强磁铁C 悬浮于空中,纸杯D 粘贴在强磁铁C 上,用于盛放物体,霍尔传感器E 用于检测强磁铁C 位置,返回信号用于控制线 A 环形磁铁 B 线圈 D E 霍尔传感器
二、要求 1. 基本要求: (1)将强磁铁C放于该装置中,可用肉眼观测出强磁铁C处于明显悬浮状态; (2)强磁铁C处于悬浮状态时间不少于60s; (3)增设四个按键,控制强磁铁C向x轴、y轴某一指定方向摆动。 2. 发挥部分 (1)在纸杯D一侧粘贴一枚一元硬币,使纸杯D与强磁铁C所组成的系统中心发生偏移,此时纸杯D与强磁铁C所组成的系统仍能稳定悬浮, 悬浮时间不少于60s; (2)在此系统一侧放置电风扇,要求纸杯D能在有风条件下保持悬浮状态超过60s。改变电风扇与系统之间距离,测量纸杯D保持悬浮状态时 电风扇可摆放的最近距离;; (3)控制纸杯D以图示z轴为轴发生陀螺进动; (4)增加强磁铁C悬浮位置控制,使强磁铁C可向x轴或y轴某一指定方向移动,并能显示强磁铁C当前位置坐标; (5)外观精美、别致,节能; (6)其他。 三、说明 (1)题目为应用性、开放性试题,希望参赛者发挥想象力和创造力; (2)环形磁铁A可使用现成环形永磁体,也可使用亚克力板等板材,粘贴强磁铁产生所需磁场; (3)强磁铁C直径应小于30mm,可采用钕磁铁作为强磁材料。环形磁铁A (或亚克力板材)直径应小于150mm; (4)发挥部分(1)中硬币粘贴,可使用透明胶进行粘贴; (5)发挥部分(2)中,测试时使用同一电风扇,档位设为一确定档位,测试过程中只改变电风扇与系统距离; (6)基础部分(3)中摆动,指强磁铁可向某一方向移动,之后处于稳定状态。此稳定状态所处位置可为移动之前位置,亦可为移动之后位置。 若移动之后强磁铁没有自动弹回原位置,则视为发挥部分(4)中所述 移动。若能完成发挥部分(4),则基础部分(3)直接得满分。 (7)陀螺进动指下图所示运动。发挥部分(3)中,若偏转角θ越大,则此
《Matlab仿真技术》 设计报告 题目磁悬浮系统建模及其PID控制器设计 专业班级电气工程及其自动化 11**班 学号 201110710247 学生姓名 ** 指导教师 ** 学院名称电气信息工程学院 完成日期: 2014 年 5 月 7 日
磁悬浮系统建模及其PID控制器设计 Magnetic levitation system based on PID controller simulation 摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。 PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 关键字:磁悬浮系统;PID控制器;MATLAB仿真
一、磁悬浮技术简介 1.概述: 磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。 1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营的若干猜想--也就是磁悬浮的早期模型。并列出了无摩擦阻力的磁悬浮列车使用的可能性。然而,当时由于科学技术以及材料局限性磁悬浮列车只处于猜想阶段,未提出一个切实可行的办法来实现这一目标。 1842年,英国物理学家Earnshow就提出了磁悬浮的概念,同时指出:单靠永久磁铁是不能将一个铁磁体在所有六个自由度上都保持在自由稳定的悬浮状态。 1934年,德国的赫尔曼·肯佩尔申请了磁悬浮列车这一的专利。 在20世纪70、80年代,磁悬浮列车系统继续在德国蒂森亨舍尔测试和实施运行。德国开始命名这套磁悬浮系统为“磁悬浮”。 1966年,美国科学家詹姆斯·鲍威尔和戈登·丹比提出了第一个具有实用性质的磁悬浮运输系统。 1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。 2009年时,国内外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国内外学者和企业界人士都对其倾注了极大的兴趣和研究热情。 2. 磁悬浮技术的应用及展望 20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km 轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。在制造磁悬浮列车的
上海高速磁悬浮地面牵引供电系统 1 引言近些年来,磁浮列车以其高速、节能、安全、舒适、环保等优点日益受到人们越来越多的关注。目前德国和日本是世界上磁浮列车研究最多 的国家:德国已经研制了tr 系列吸力型磁浮列车,并在埃姆斯兰建造了大型试 验用的tve 试验线;日本也研制了mlu 系列斥力型磁浮列车和hsst 系列吸力型磁浮列车,并修建了山梨试验线。我国也在积极开展这方面的研究工作,上海已 从德国引进了tr08 型磁浮列车,并已投入了商业运行,同时也拉开了消化吸收其先进技术的序幕。在磁浮列车运行系统中,合理有效的牵引供电系统是实现 磁浮列车高速可靠运行的关键之一,故而成为本文的主要研究对象。2 磁浮列车牵引供电系统概况磁浮列车按照动力源(直线电动机)定子的长短相应 可分为短定子直线电动机驱动的磁浮列车和长定子直线电动机驱动的磁浮列车。短定子直线电动机是将定子绕组安装在车体的底部,通过向磁浮列车提供变压 变频的电源,由车上的短定子产生行波磁场;轨道上安置结构较为简单的长转子,这种结构多用于直线异步牵引电动机的驱动系统。由于列车通过受流器供电, 而高速受流困难使列车运行速度、异步电机的功率因数及效率均受到限制,因 此该系统仅用于低速小功率短距离的电力牵引。长定子直线同步电动机驱动的 磁浮列车的底部安置有直线电机的转子,整条轨道上安装同步电机的长定子绕组。磁浮列车内部对转子的供电简单,没有高速受流的困难。采用这种直线同 步电动机驱动,适合于高速、大功率、长距离的电力牵引。德国和日本均采用 这种系统。德国研制了常导吸浮式磁浮列车:由车上常导电流产生的电磁吸引 力吸引轨道下方的导磁体,使列车浮起。常导电流比较容易获得,通常由蓄电 池或感应式发电线圈等设备产生电流,供给同步直线电动机的转子。但常导系 统电磁吸引力相对较小,列车悬浮高度约10mm,故对控制精度的要求很高。
《制作磁悬浮笔架》 一、教学目标: 1、知识目标: 通过对磁悬浮工作原理的探究,帮助儿童掌握磁的相关知识 2、能力目标: 锻炼学生利用简单器材完成实验能力 3、思维目标: 通过以上两点提升学生的观察、分析的思维能力 二、教学重点与难点: 1、教学重点: 探究磁悬浮实验的工作原理。 2、教学难点: 探究磁悬浮列车的工作原理 三、教学设计: 从一个小魔术开始回顾磁铁的性质及其作用——利用磁铁的性质探究磁悬浮原理——了解磁悬浮列车的运行原理——激发学生的兴趣,制作完成磁悬浮笔成品知识拓展,让学生了解各国对磁悬浮技术的应用。 四、教学方法: 演示、验证式、讨论式教学 五、教学准备: 教师演示器材学生器材 工具材料工具材料 无磁悬浮笔套件无磁悬浮笔套件 六、教学过程: 1、复习前课: 2、课程兴趣点:磁铁为什么可以漂浮? 3、引导质疑: 第一步通过演示一个小魔术,回顾磁铁的性质及其作用。 第二步利用磁铁的性质学习磁悬浮原理,并了解磁悬浮列车的运行原理。 第三步通过制作完成磁悬浮成品,激发学生的兴趣,并让学生了解各国对磁悬浮技术的应
用。 4、探究验证过程: ⑴实验器材:磁悬浮笔套件 ⑵实验目的:了解磁极同极相斥,异极相吸的性质 ⑶实验记录:当两磁铁靠近时,会出现两种情况,一种是两磁铁吸在一起,一种是上面的磁 铁悬浮起来。 学生实验:通过以上演示实验,让学生掌握实验规律,独立完成本节课实验(教师可以适当的点拨) 5、总结回顾: 磁悬浮也称作“磁浮”,是一种利用磁体间的吸引力和排斥力来使物件浮在空中的技术,还有利用电磁力的吸引或排斥,使物件不受引力束缚,从而自由浮动的。 6、拓展表达: (1)拓展视野: 磁悬浮列车是怎样运动的呢?当然靠磁力了,首先利用磁铁同性相斥的原理把列车悬浮 起来,再利用磁铁异性相吸、同性相斥的原理使列车前进,消耗了电能。根据我们现有的知 识可以这样理解,但是磁悬浮实际工作原理要复杂得多。 (2)表达知识: 磁悬浮就是运用磁体“同性相斥,异性相吸”的性质,使磁体具有抗拒地心引力的能力 悬浮起来。 七、板书设计: 磁悬浮 一、磁铁为什么可以漂浮? 二、实验部分 1、了解磁极同极相斥,异极相吸的性质 三、总结 磁极:南极(S)、北极(N) 同极相斥,异极相吸 八、课后延伸: 课下总结整理磁铁在生活中的应用,通过本节课的学习,学生掌握磁悬浮的原理,回家 后可以利用相关材料制作磁悬浮玩具,并写出实验步骤。
第14卷 第4期 2006年8月 光学精密工程 O ptics and Precisio n Enginee ring V ol.14 N o.4 Aug.2006 收稿日期:2005-10-14;修订日期:2006-05-16. 基金项目:国家863项目(No.863-2-2-4-9B ) 文章编号 1004-924X (2006)04-0662-05 磁悬浮控制力矩陀螺高速转子的优化设计 韩邦成1 ,虎 刚2 ,房建成1 , (1.北京航空航天大学仪器科学与光电工程学院,北京100083; 2.北京控制工程研究所,北京100080) 摘要:介绍了一种磁悬浮控制力矩陀螺(CMG )的结构,其中陀螺转子的额定角动量为200N ms 。利用多学科设计优化软件iSIG H T 及有限元分析软件A N SYS ,以质量为优化目标,以静力学、动力学和其他要求同时作为约束条件,对永磁偏置混合磁轴承支承的5自由度高速盘形转子(额定转速为20000rpm )进行了优化设计。通过优化设计,其静强度安全系数由原来的2.39提高到2.63,提高了10%;转子质量由15.032kg 减小为13.972kg ,减少了7.1%。为满足控制系统对共振频率的要求,转子的弹性一阶共振频率为1313Hz (动力学)。关 键 词:控制力矩陀螺;陀螺转子;混合磁轴承;优化设计;有限元法中图分类号:V 241.5 文献标识码:A Optimization design of magnetic suspended gyroscope rotor HAN Bang -cheng 1,H U Gang 2,FA NG Jian -cheng 1 (1.B eijing University o f Aeronautics &Astronautics ,Beijing 100083,China ; 2.B eijing Institute o f Control E ngineering ,Beijing 100080,China ) A bstract :The structure of a Co ntro l M omentum Gy roscope (CM G )w as introducecl ,in w hich g y ro -sco pe ro to r w ith the rating rotatio n speed of 20,000r /min and rating ang ular m omentum of 200N ms is suppor ted by pe rmanent bias active mag netic bearing.The softw are of m ultidisciplinary design optimiza tion (iSIG H T )and the so ftw are of Finite Element Analy sis Softw are (ANSYS )w ere applied to optimize the ro to r to reduce the m ass of rotor.The re sults of optimization indicate that the mass of the rotor is decreased from 15.032kg to 13.973kg (is reduced by 7.1%),the safety factor is in -creased from 2.39to 2.63(is increased by 10%),the first resonance frequency is 1313H z com pare to original design results. Key words :Control M oment Gy roscope (CMG );gy roscope rotor ;permanent bias magne tic bearing ; optimizatio n desig n ;Finite Element M ethod (FEM )