实验一数据传送
一、实验目的
熟悉星研集成环境软件的使用方法。熟悉Borland公司的TASM编译器
熟悉8086汇编指令,能自己编写简单的程序,掌握数据传输的方法。
二、实验内容
1、熟悉星研集成环境软件。
2、编写程序,实现数据段的传送、校验。
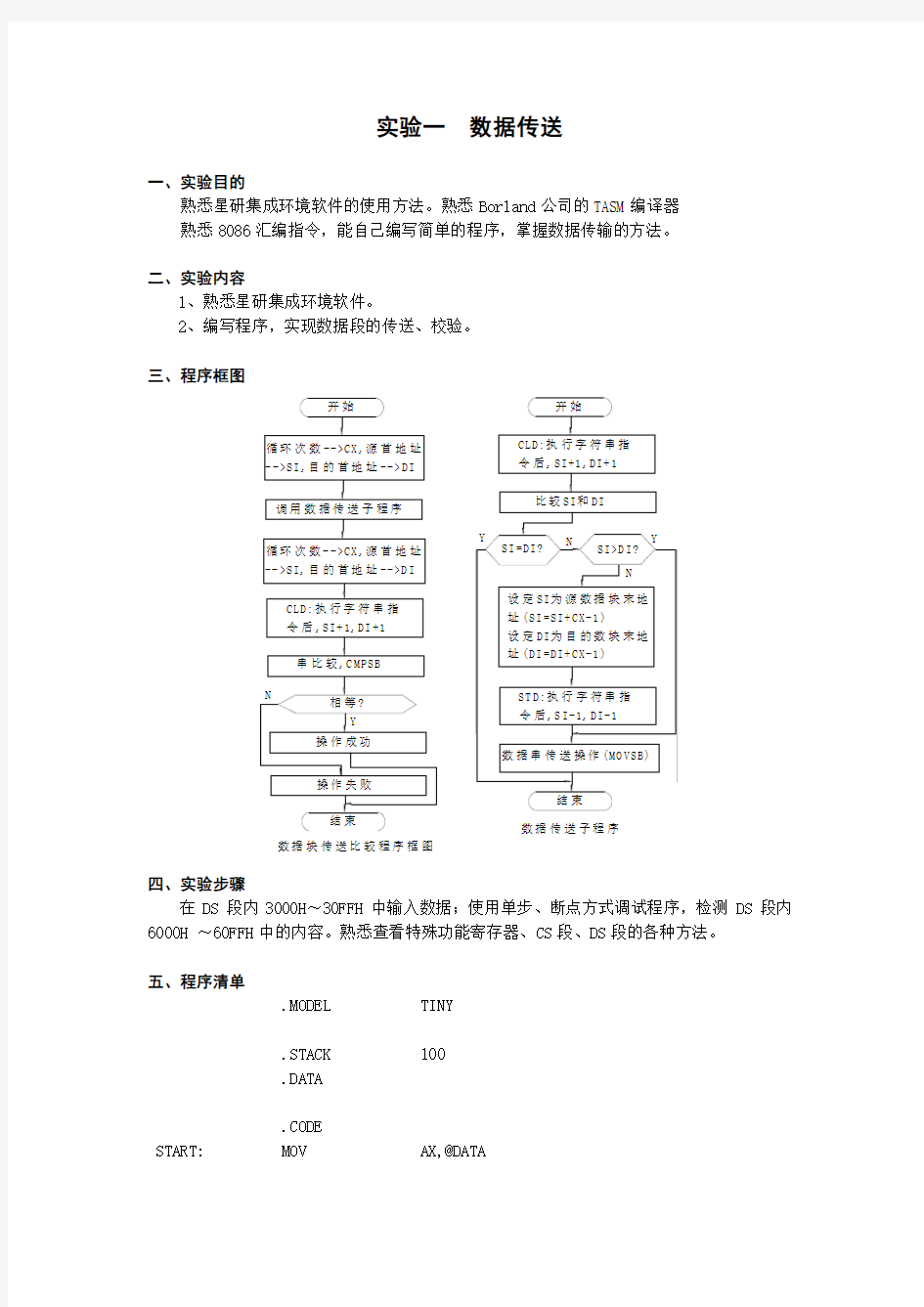
三、程序框图
数据传送子程序
数据块传送比较程序框图
四、实验步骤
在DS段内3000H~30FFH中输入数据;使用单步、断点方式调试程序,检测DS段内6000H ~60FFH中的内容。熟悉查看特殊功能寄存器、CS段、DS段的各种方法。
五、程序清单
.MODEL TINY
.STACK 100
.DATA
.CODE
START: MOV AX,@DATA
MOV DS,AX
MOV ES,AX
NOP
MOV CX,100H
MOV SI,3000H
MOV DI,6000H
CALL Move
MOV CX,100H
MOV SI,3000H
MOV DI,6000H
CLD
REPE CMPSB
JNE ERROR
TRUE: JMP $
ERROR: JMP $
Move PROC NEAR
CLD
CMP SI,DI
JZ Return
JNB Move1
ADD SI,CX
DEC SI
ADD DI,CX
DEC DI
STD
Move1: REP MOVSB
Return: RET
Move ENDP
END START
六、思考题
1、子程序Move中为什么比较SI、DI?
源数据块与目标范围有可能部分重叠,需要考虑从第一个字节开始复制(顺序复制),还是从最后一个字节开始复制(倒序复制)。
2、编写一个程序,将DS段中的数据传送到实验仪B4区的61C256中。
说明:B4区的61C256在I/O设备区,使用IOR、IOW读写。
实验六冒泡排序
一、实验目的
熟悉使用8086指令,掌握汇编语言的设计和调试方法,了解如何使用高效方法对数据排序。
二、实验内容
编写并调试一个排序程序,要求使用冒泡法将一组数据从小到大重新排列。
三、程序框图
冒泡排序程序框图
四、实验步骤
使用断点方式调试程序,检查数据段中数据是否按从小到大的顺序排列。
五、程序清单
.MODEL TINY
.STACK 100
.DATA
TAB_1: DB 0H,5H,6H,3H,8H,92H,04H,57H,46H,01H,0FFH,0A0H,45H,99H,55H,66H .CODE
START: MOV AX,@DATA
MOV DS,AX
NOP
MOV CX,16 - 1 ;存放比较次数 = 数据个数 - 1 STAR2: PUSH CX
LEA SI,TAB_1
MOV DL,0 ;0->交换过数据标志
STAR3: LODSB
MOV AH,[SI]
CMP AH,AL
JNB STAR5
MOV [SI],AL
MOV [SI - 1],AH
MOV DL,1 ;1->交换过数据标志
STAR5: LOOP STAR3
POP CX
CMP DL,0
JZ Exit
LOOP STAR2
Exit: JMP $
END START
六、思考题
你还知道哪些排序方法?另外编写一个排序子程序。(数据结构方面的教材上有十几种排序方法)。
实验七二分查找法
一、实验目的
熟悉使用8086指令,掌握汇编语言的设计和调试方法。
二、实验内容
编写并调试一个二分查找法程序,要求在一组从小到大排列的数据中查找一个数。
三、程序框图
二分查找法流程框图
四、实验步骤
在Search_Data中定义一个需要查找的数据,运行程序,是否能找到指定的数据,结果是否正确。
五、程序清单
.MODEL TINY
Search_Data EQU 60 ;需要查找的数据
.STACK 100
.DATA
TAB_1: DB 32 ;共有32个数
DB 01,03,05,06,07,10,11,12,13,14,15,16,20,25,26,29
DB 37,38,39,42,43,44,45,50,52,53,56,59,60,62,66,68
.CODE
START: MOV AX,@DATA
MOV DS,AX
NOP
LEA SI,TAB_1
LODSB
MOV DH,AL ;最大位置
MOV DL,0 ;最小位置
MOV AH,0 ;当前位置
XOR BH,BH
STAR1: MOV BL,DH
ADD BL,DL
CLC
SHR BL,1
CMP BL,AH
JNE STAR2
MOV AL,0FFH ;没有找到
JMP NoFind
STAR2: MOV AH,BL
MOV AL,[SI + BX]
CMP AL,Search_Data
JNZ STAR3
MOV AL,AH
JMP Find
STAR3: JB STAR4
MOV DH,AH
JMP STAR1
STAR4: MOV DL,AH
JMP STAR1
Find: JMP $
NoFind: JMP $
END START
六、思考题
1、程序只能实现256字节范围内的查找,请读者考虑,若查找范围大于256字节,程序该怎么编写?
实验一 8255控制交通灯实验
一、实验目的与要求
1、了解8255芯片的工作原理,熟悉其初始化编程方法以及输入、输出程序设计技巧。学会使用8255并行接口芯片实现各种控制功能,如本实验(控制交通灯)等。
2、熟悉8255内部结构和与8088的接口逻辑,熟悉8255芯片的3种工作方式以及控制字格式。
3、认真预习本节实验内容,尝试自行编写程序,填写实验报告。
二、实验设备
STAR系列实验仪一套、PC机一台
三、实验内容
1、编写程序:使用8255的PA0..
2、PA4..6控制LED指示灯,实现交通灯功能。
2、连接线路验证8255的功能,熟悉它的使用方法。
四、实验原理图
D034D133D232D331D430D529D628D727PA04PA13PA22PA31PA440PA539PA638PA737PB018PB119PB220PB321PB422PB523PB624PB725PC014PC115PC216PC317PC413PC512PC611PC7
10
RD 5WR 36A09A1
8RESET 35CS
6
8255
U36
D0D1D2D3D4D5D6D7WR
RD
RST A0
A1
PC5PC6PC7
PC2PC3PC4PC0PC1DS35DS36DS37DS38DS39DS40DS4112345678
VCC
DS42
A0A1
CS
CS1(0F000H)
510R111510
R112
510R113510R114510R115510R116510R117510R118
MOV AL,80H ;PA、PB、PC为基本输出模式
OUT DX,AL
MOV DX,PA_ADD ;灯全熄灭
MOV AL,0FFH
OUT DX,AL
LEA BX,LED_Data
START1: MOV AL,0
XLAT
OUT DX,AL ;东西绿灯,南北红灯
CALL DL5S
MOV CX,6
START2: MOV AL,1
XLAT
OUT DX,AL ;东西绿灯闪烁,南北红灯
CALL DL500ms
MOV AL,0
XLAT
OUT DX,AL
CALL DL500ms
LOOP START2
MOV AL,2 ;东西黄灯亮,南北红灯
XLAT
OUT DX,AL
CALL DL3S
MOV AL,3 ;东西红灯,南北绿灯
XLAT
OUT DX,AL
CALL DL5S
MOV CX,6
START3: MOV AL,4 ;东西红灯,南北绿灯闪烁XLAT
OUT DX,AL
CALL DL500ms
MOV AL,3
XLAT
OUT DX,AL
CALL DL500ms
LOOP START3
MOV AL,5 ;东西红灯,南北黄灯亮
XLAT
OUT DX,AL
CALL DL3S
JMP START1
DL500ms PROC NEAR
PUSH CX
MOV CX,60000
DL500ms1: LOOP DL500ms1
POP CX
RET
DL500ms ENDP
DL3S PROC NEAR
PUSH CX
MOV CX,6
DL3S1: CALL DL500ms
LOOP DL3S1
POP CX
RET
ENDP
DL5S PROC NEAR
PUSH CX
MOV CX,10
DL5S1: CALL DL500ms
LOOP DL5S1
POP CX
RET
ENDP
END START
七、实验扩展及思考
1、如何对8255的PC口进行位操作?
实验二 74HC138译码器实验
一、实验目的与要求
1、掌握74HC138译码器的工作原理,熟悉74HC138译码器的具体运用连接方法,了解74HC138是如何译码的。
2、认真预习本节实验内容,尝试自行编写程序,填写实验报告
二、实验设备
STAR系列实验仪一套、PC机一台
三、实验内容
1、编写程序:使用82C55的PC0、PC1、PC2控制74HC138的数据输入端,通过译码产生8选1个选通信号,轮流点亮8个LED指示灯。
2、运行程序,验证译码的正确性。
四、实验原理图
COM_ADDR EQU 0B003H
T0_ADDR EQU 0B000H
T1_ADDR EQU 0B001H
.STACK 100
.CODE
START: MOV DX,COM_ADDR
MOV AL,35H
OUT DX,AL ;计数器T0设置在模式2状态,BCD码计数
MOV DX,T0_ADDR
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL ;CLK0/1000
MOV DX,COM_ADDR
MOV AL,77H
OUT DX,AL ;计数器T1为模式3状态,输出方波,BCD码计数
MOV DX,T1_ADDR
MOV AL,00H
OUT DX,AL
MOV AL,10H
OUT DX,AL ;CLK1/1000
JMP $ ;OUT1输出1S的方波
END START
七、实验扩展及思考
1、8253还有其它五种工作方式,其它工作模式下,硬件如何设计?程序如何编写?
2、使用8253,编写一个实时钟程序。
实验九并行DA实验
一、实验目的
了解数模转换的原理;了解0832与8088的接口逻辑,掌握使用DAC0832进行数模转换。
二、实验设备
STAR系列实验仪一套、PC机一台、示波器一台。
三、实验内容
1、编写程序:用0832输出正弦波
2、按图连线,运行程序,使用示波器观察实验结果。
四、实验原理图
VREF 8RFB 9
DGND
10
IOUT111IOUT2
12
DI713DI614DI515DI416DI07CS 1WR12AGND 3DI34DI25DI16XFER 17WR218ILE 19VDD
20
D A C 0832L C N
U20
1K
W5510
R78
0.1uF
C332
3
6
4
7
18
5LM741CN
U23
10K
W6 4.7K R79-12V
VCC
D5
+12V
-12V
OUT
D0D1
D2D3D4D5D6D7
12
JP31
-INPUT413OUTPUT11+INPUT13GND 11V+4+INPUT310+INPUT25-INPUT3
9-INPUT2
6
OUTPUT3
8
OUTPUT414
OUTPUT27
-INPUT12+INPUT4
12LM324N
U26
DS23470R71-12V
WR
0.1uF
C32
CS
LOOP $
POP CX
RET
DELAY ENDP
END START
信息与通信工程学院通信原理软件实验报告
实验二时域仿真精度分析 一、实验目的 1. 了解时域取样对仿真精度的影响 2. 学会提高仿真精度的方法 二、实验原理 一般来说,任意信号s(t)是定义在时间区间(-无穷,+无穷)上的连续函数,但所有计算机的CPU 都只能按指令周期离散运行,同时计算机也不能处理这样一个时间段。为此将把s(t)按区间[-T/2 ,+T/2 ]截短为按时间间隔dert T均匀取样,得到的取样点数为N=T/dert T. 仿真时用这个样值集合来表示信号s(t)。Dert T反映了仿真系统对信号波形的分辨率,越小则仿真的精确度越高。据通信原理所学,信号被取样以后,对应的频谱是频率的周期函数,其重复周期是1/t; 。如果信号的最高频率为 那么必须有 才能保证不发生频域混叠失真,这是奈奎斯特抽样定理。设 则称为仿真系统的系统带宽。如果在仿真程序中设定的采样间隔是,那么不能用 此仿真程序来研究带宽大于这的信号或系统。换句话说,就是当系统带宽一定的情况下,信号的采样频率最小不得小于2*Bs,如此便可以保证信号的不失真,在此基础上时域采样频率越高,其时域波形对原信号的还原度也越高,信号波形越平滑。也就是说,要保证信号的通信成功,必须要满足奈奎斯特抽样定理,如果需要观察时域波形的某些特性,那么采样点数越多,可得到越真实的时域信号。 三、实验步骤 1.将正弦波发生器模块、示波器模块、时钟模块按下图连接:
时钟设置0.01,得到的结果如下: 时钟设置0.3,以后得到的结果如下:
五、思考题 (1)观察分析两图的区别,解释其原因。 答:因为信号周期是1,而第一个图的采样周期是0.01,所以一个周期内能采样100个点,仿真出来的波形能较精确地显示成完整波形,而第二个图采样周期是0.3,所以一个周期内只有三个采样点,故信号失真了。 (2)将示波器的控制时钟的period的参数改为0.5,观察仿真结果,分析其原因。 结果如下:
微电网仿真试验研究平台 微电网是由各类分布式发电系统、储能系统和负荷等组成的可控型微型电力网,为了满足负荷的不断增长和消除分布式能源接入的不利影响,而在传统配电网基础上发展而来的。目前微电网的研究工作也正处于迅速发展的时期,微电网仿真试验是微电网开展研究工作必备手段。 北京中电建投的微电网仿真试验研究平台,可以满足交直流混合微电网的关键设备检测、功能性验证试验、能量调度管理及控制策略研究,多个微电网之间的相互影响及调度控制技术研究。 北京中电建投的微电网研究试验移动平台,内置有试验设备、检测仪器、控制室,铁锂电池组,已经应用于中国电力科学研究院,移动式可以满足接入到各种现场实施研究试验,可以灵活接入已有分布式发电系统,有针对性开展微电网技术研究。 微电网仿真试验研究平台的主要作用与功能: 1.研究微电网相关技术与关键设备,满足微电网关键设备入网检测与功能性验证; 2.开展微电网规划研究、架构研究与配置研究,控制消除分布式发电系统对配电网的影响; 3.研究微电网相关控制技术与控制算法、交直流混合微电网多种控制策略研究; 4.研究交直流混合微网仿真运行,直流母线微电网与交流母线微电网并联/独立运行模式以及控制策略技术研究; 5.能量管理与调度控制的研究,微电网储能研究、风光储科学配比优化研究与高渗透率研究。 群菱生产并具备有以下产品的核心技术: 1.风力发电机模拟器:可以模拟双馈或直驱风力发电机组并网接入特性,满足控制策略研
究及功能验证 2.柴油发电机模拟器:工作时无需加柴油,无噪声,不排废气,是研究柴油发电机组接入 微电网的必备 3.电缆阻抗模拟装置:模拟各类电缆长度的阻抗特性,是研究新能源并网接入、继保控制 程序开发必配 4.短路故障模拟装置:可以模拟相相短路故障、相地短路故障,短路电流可选择 5.非线性负荷模拟装置:满足非线性负荷、谐波负荷、冲击负荷的模拟,加载时间与负荷 曲线可以预先设定 6.可编程交流负载:各种交流负荷模拟,共有21个标准产品RLC负载、RCD负载、RL 负载、RC负载可供选择, 负荷曲线及加载时间可以预先设置并自动运行 7.可编程直流负载:可以精确模拟直流负荷特性,负荷曲线及加载时间可以预先设置并自 动运行,直流负荷全工况模拟 8.谐波闪变测量阻抗模拟系统:提供符合IEC61000-3-3、IEC61000-3-11 、VDE4105 (30°、50°、70°、85°)标准要求的不同阻抗值 9.保护时间自动测量仪:应用于各种电气实验室,过欠压、过欠频、并离切换时间自动测 量,直接显示 10.微电网中央控制器:具备完善的微电网多目标优化控制、协议转换、数据采集、测量、 保护、控制与监视功能,是一款开放的控制器,可以通过软件手动配置实现任意添加于删除所要控制设备 11.微电网监控及能量调度管理系统:组态灵活,具有可维修性和可扩充性与稳定性,并网 /离网切换管理 12.其他具备技术优势产品服务:电池模拟器、光伏模拟器、电网模拟器、燃气机发电模拟
本科生实验报告 实验课程微机原理与接口技术 学院名称信息科学与技术学院 专业名称电子信息工程 学生姓名干娜 学生学号201413080229 指导教师李志鹏 实验地点6B610 实验成绩 二〇一六年十月二〇一六年十二月
实验一、动态调试程序DEBUG 一、实验目的 1.动态调试程序DEBUG环境的搭建; 2.掌握各种汇编指令的作用; 3.掌握磁盘文件操作命令的使用; 4.掌握查找、比较、填充和移动内存命令的使用。 二、实验内容 1.搭建汇编调试环境,安装DOS系统; 2.进行DEBUG动态调试程序的启动与退出; 3.进行汇编、执行、跟踪与反汇编命令的编写与运行; 4.进行显示、修改内存和寄存器命令的编写与运行; 5.进行查找、比较、填充和移动内存命令的编写与运行。 三、DEBUG的启动与退出 DEBUG的启动:首先选择一个磁盘,建立一个名为“TEST”的文件,文件名可以任意,然后挂载DOS系统在任意磁盘上,执行代码界面为: 出现“-”表示执行成功,进入DEBUG调试环境,此后可以进行代码的编译与执行。 DEBUG的退出命令:-Q 四、汇编、执行、跟踪与反汇编 1.A命令:逐行汇编命令,主要用于小段程序的汇编和修改目标程序。使用逐行汇编命令的格式为: A[地址] 实验内容:汇编一小段程序,DOS运行界面为:
该段程序完成了对AX,BX,CX,DX寄存器写入规定的数据。 2.G命令:启动运行一个程序或程序的一段,编写格式为: G[=<起始地址>][<断点地址>…] 执行A命令的代码后,运用G命令查看各个寄存器状态: 结果分析:从运行结果可以看出,BX、CX、DX已经写入了输入值,但AX 中的值并不是输入值,可能是AX寄存器的值写入后又被改变。 3.T命令 T命令用来逐条跟踪程序的运行,编写格式如下: T[=<地址>][<跟踪条数>] 每条指令执行后,都要暂停并显示各寄存器的内容,跟踪执行实际上是单步执行,执行结果如下: 从地址100开始,跟踪三条指令,从执行细节可以看出AX、BX、CX、DX都写入了程序给定的值,IP指针的值也是逐条递增。 4.U命令:用来对二进制代码程序进行反汇编,常用于分析和调试目标程序,引用格式如下: U[<地址>]
2013年通信原理硬件实验报告 学院:信息与通信工程学院 班级:2011211104 姓名: 学号: 班内序号: 组号: 同组人:
目录 实验一:双边带抑制载波调幅(DSB-SC AM) (3) 实验二:具有离散大载波的双边带调幅波(AM) (14) 实验三:调频(FM) (21) 实验六:眼图 (28) 实验七:采样,判决 (31) 实验八:二进制通断键控(OOK) (34) 实验十一:信号星座(选作) (41) 实验十二:低通信号的采样与重建 (45)
实验一双边带抑制载波调幅(DSB-SC AM) 一.实验目的 (1)了解DSB-SC AM信号的产生及相干解调的原理和实现方法。 (2)了解DSB-SC AM的信号波形及振幅频谱的特点,并掌握其测量方法。 (3)了解在发送DSB-SC AM信号加导频分量的条件下,收端用锁相环提取载波的原理及其实现方法。 (4)掌握锁相环的同步带和捕捉带的测量方法,掌握锁相环提取载波的测试方法。 二.实验器材 PC机一台、TIMS实验平台、示波器、导线等。 三.实验原理 1.双边带抑制载波调幅(DSB-SC AM)信号的产生和表达式 图1.1 2.双边带抑制载波调幅信号的解调 基本思路:利用恢复的载波与信号相乘,将频谱搬移到基带,还原出原基带信号。 图1.2 3.DSB-SC AM信号的产生及相干解调原理框图 ()()()()() cos c c c s t m t c t m t A t ω? ==+
图1.3 四.实验内容及结果 1.DSB-SC AM信号的产生 (1)实验步骤: 图1.4 1.按照上图,将音频振荡器输出的模拟音频信号及主振荡器输出的100KHz模
北京邮电大学实验报告 题目:基于SYSTEMVIEW通信原理实验报告
实验一:验证抽样定理 一、实验目的 1、掌握抽样定理 2. 通过时域频域波形分析系统性能 二、实验原理 低通滤波器频率与m(t)相同 三、实验步骤 1. 要求三个基带信号相加后抽样,然后通过低通滤波器恢复出原信号。 2. 连接各模块完成系统,同时在必要输出端设置观察窗。 3. 设置各模块参数。 三个基带信号的频率从上到下分别设置为10hz、12hz、14hz。 抽样信号频率设置为28hz,即2*14hz。(由抽样定理知,) 将低通滤波器频率设置为14hz,则将恢复第三个信号(其频率为14hz)进行系统定时设置,起始时间设为0,终止时间设为1s.抽样率设为1khz。 3.观察基带信号、抽样后的信号、最终恢复的信号波形
四、实验结果 最上面的图为原基带信号波形,中间图为最终恢复的信号波形,最下面的图为抽样后的信号波形。 五、实验讨论 从实验结果可以看出,正如前面实验原理所述,满足抽样定理的理想抽样应该使抽样后的波形图如同冲激信号,且其包络图形为原基带信号波形图。抽样后的信号通过低通滤波器后,恢复出的信号波形与原基带信号相同。 由此可知,如果每秒对基带模拟信号均匀抽样不少于2次,则所得样值序列含有原基带信号的全部信息,从该样值序列可以无失真地恢复成原来的基带信号。 讨论:若抽样速率少于每秒2次,会出现什么情况? 答:会产生失真,这种失真被称为混叠失真。 六、实验建议、意见 增加改变抽样率的步骤,观察是否产生失真。
实验二:奈奎斯特第一准则 一、实验目的 (1)理解无码间干扰数字基带信号的传输; (2)掌握升余弦滚降滤波器的特性; (3)通过时域、频域波形分析系统性能。 二、实验原理 在现代通信系统中,码元是按照一定的间隔发送的,接收端只要能够正确地恢复出幅度序列,就能够无误地恢复传送的信号。因此,只需要研究如何使波形在特定的时刻无失真,而不必追求整个波形不变。 奈奎斯特准则提出:只要信号经过整形后能够在抽样点保持不变,即使其波形已经发生了变化,也能够在抽样判决后恢复原始的信号,因为信息完全恢复携带在抽样点幅度上。 奈奎斯特准则要求在波形成形输入到接收端的滤波器输出的整个传送过程传递函数满足:,其充分必要条件是x(t)的傅氏变换X ( f )必须满足 奈奎斯特准则还指出了信道带宽与码速率的基本关系。即R B =1/T B =2? N =2B N。 式中R b 为传码率,单位为比特/每秒(bps)。f N 和B N 分别为理想信道的低通截止 频率和奈奎斯特带宽。上式说明了理想信道的频带利用率为R B /B N =2。 在实际应用中,理想低通滤波器是不可能实现的,升余弦滤波器是在实际中满足无码间干扰传输的充要条件,已获得广泛应用的滤波器。 升余弦滤波器的带宽为:。其中,α为滚降系数,0 ≤α≤1, 三、实验步骤 1.根据奈奎斯特准则,设计实现验证奈奎斯特第一准则的仿真系统,同时在必 要输出端设置观察窗。设计图如下
实 验 项 目 微程序控制器实验实验时间2015年10月31日 实验目的(1) 掌握微程序控制器的组成原理。 (2) 掌握微程序的编制、写入,观察微程序的运行过程。 实 验 设 备 PC机一台,TD-CMA实验系统一套 实验原理 微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制的硬件逻辑部件工作的微命令序列,完成数据传送和各种处理操作。它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,称为控制存储器,微程序控制器原理框图如图3-2-1 所示。 控制器是严格按照系统时序来工作的,因而时序控制对于控制器的设计是非常重要的,从前面的实验可以很清楚地了解时序电路的工作原理,本实验所用的时序由时序单元来提供,分为四拍TS1、TS2、TS3、TS4,时序单元的介绍见附录2。 微程序控制器的组成见图3-2-2,其中控制存储器采用3 片2816 的E2PROM,具有掉电保 护功能,微命令寄存器18 位,用两片8D 触发器(273)和一片4D(175)触发器组成。微地址寄存器6 位,用三片正沿触发的双D 触发器(74)组成,它们带有清“0”端和预置端。在不判别测试的情况下,T2 时刻打入微地址寄存器的内容即为下一条微指令地址。当T4 时刻进行测试判别时,转移逻辑满足条件后输出的负脉冲通过强置端将某一触发器置为“1”状态,完成地址修改。
在实验平台中设有一组编程控制开关KK3、KK4、KK5(位于时序与操作台单元),可实现对存储器(包括存储器和控制存储器)的三种操作:编程、校验、运行。考虑到对于存储器(包括存储器和控制存储器)的操作大多集中在一个地址连续的存储空间中,实验平台提供了便利 的手动操作方式。以向00H 单元中写入332211 为例,对于控制存储器进行编辑的具体操作步骤如下:首先将KK1 拨至‘停止’档、KK3 拨至‘编程’档、KK4 拨至‘控存’档、KK5 拨至 ‘置数’档,由CON 单元的SD05——SD00 开关给出需要编辑的控存单元首地址(000000),IN 单元开关给出该控存单元数据的低8 位(00010001),连续两次按动时序与操作台单元的开关ST(第一次按动后MC 单元低8 位显示该单元以前存储的数据,第二次按动后显示当前改动的数据),此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M7——M0 显示当前数据(00010001)。然后将KK5 拨至‘加1’档,IN 单元开关给出该控存单元数据的中8 位(00100010),连续两次按动开关ST,完成对该控存单元中8 位数据的修改,此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M15——M8 显示当前数据(00100010);再由IN 单元开关给出该控存单元数据的高8 位(00110011),连续两次按动开关ST,完成对该控存单元高8 位数据的修改此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M23——M16 显示当前数据(00110011)。此时被编辑的控存单元地址会自动加1(01H),由IN 单元开关依次给出该控存单元数据的低8 位、中8 位和高8 位配合每次开关ST 的两次按动,即可完成对后续单元的编辑。
2013年微机原理硬件实验报告 学院:信息与通信工程学院班级:2011211104 姓名:
实验一 I/O地址译码 一.实验目的 掌握I/O地址译码电路的工作原理。 二.实验原理和内容 1.实验电路如图1-1所示,其中74LS74为D触发器,可直接使用实验台上数字电路实验区的D触发器,74LS138为地址译码器。 译码输出端Y0~Y7在实验台上“I/O地址“输出端引出,每个输出端包含8个地址,Y0:280H~287H,Y1:288H~28FH,……当CPU执行I/O指令且地址在280H~2BFH范围内,译码器选中,必有一根译码线输出负脉冲。 例如:执行下面两条指令 MOV DX,2A0H OUT DX,AL(或IN AL,DX) Y4输出一个负脉冲,执行下面两条指令 MOV DX,2A8H OUT DX,AL(或IN AL,DX) Y5输出一个负脉冲。 原理:地址2A0H的A5,A4,A5为100,在输入或输出时,IOW或I OR为0,使得74LS138被选中,经过译码,在Y4口输出负脉冲。其他同理。 图1-1 利用这个负脉冲控制L7闪烁发光(亮、灭、亮、灭、……),时间间隔通过软件延时实现。 2.接线:Y4/IO地址接CLK/D触发器
Y5/IO 地址 接 CD/D 触发器 D/D触发器 接 SD/D 角发器 接 +5V Q /D 触发器 接 L7(L ED 灯)或 逻辑笔 三.程序流程图 四.源程序 DA TA ?SE GMENT D ATA ??ENDS ST ACK SE GME NT ST ACK 'STA CK' DB 100H DU P(?) STA CK ENDS 否
振幅调制(Amplitude Modulation)与解调实验目的: 了解TIMS 实验的软硬件环境和基本的软件调试方式; 掌握AM 信号的调制方法; 掌握AM 信号的解调方法; 掌握调制系数的含义; 实验原理: 具有离散大载波(AM)调制的基本原理,原理框图如下: AM 信号调制原理框图 包络检波器的基本构成和原理,原理框图如下: AM 信号解调原理框图 AM信号输出 AM信号产生实验连接图
AM信号的非相干解调实验连接图 实验器件: 音频振荡器(Audio Oscillator),可变直流电压(Variable DC), 主振荡器(Master Signals),加法器(Adder),乘法器(Multiplier),移相器(Phase Shifer),共享模块(Utilities Module)和音频放大器(Headphone Amplifier) 实验步骤: 按照设计图设计AM 调制与解调系统,模拟基带信号频率为1KHz,电压振幅为1V;载波为一高频信号,电压振幅为1V; 实现AM 调制与解调系统,分别观察基带信号、调制信号和解调信号的波形; 调制系统参数,观察调制系数为a>1,a=1,a<1 时调制信号和解调信号的波形变化。实验波形: a>1
a=1 a<1 思考题: 1、若用同步检波,如何完成实验?比较同步检波和包络检波的有缺点。 用同步检波则在接受AM调制信号端乘一个恢复载波信号,再经过低通滤波器就完成同步解调了。同步检波要求恢复载波于接受信号载波同频同相,一般要在发端加一离散的载频分量即导频,则在发端要分配一部分功率给导频,或者在收端提取载波分量,复杂且不经济。线形良好,增益高,对调制系数没要求。包络检波不需要提取载波分量,比较简单经济,但要求调制系数小于等于1,抗干扰差。 2、若调制系数大于1,是否可以用包络检波来还原信号。 不可以,这时已经出现失真现象。 3、调制系数分别”<1”,”>1”,”=1”时,如何计算已调信号的调制系数? A B分别表示波形垂直方向上的最大和最小长度,代入下述公式即可求出 调幅系数ma = [(A-B)/(A+B)] ? 100 %
微程序控制器实验报告文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
一、实验目的 1、通过实验,进一步理解微程序控制器的组成结构。理解微程序控制器的控 制原理 2、加深理解微程序控制器的工作原理。掌握指令流程与功能 3、理解掌握微程序控制器的设计思路与方法 二、实验内容与步骤 1、微程序控制器的组成原理 控制存储器:实现整个指令系统的所有微程序,一般指令系统是规定的由高速半导体存储器构成,容量视机器指令系统而定,取决于微程序的个数,其长度就是微指令字的长度。 微指令寄存器:存放从控存读出的当前微指令。微操作控制字段将操作控制信号送到控制信号线上,微地址字段指出下一条微地址的形成。 微地址寄存器:存放将要访问的下一条微指令地址 地址转移逻辑:形成将要执行的微指令地址,形成方式: 取指令公操作所对应的微程序一般从控存的0地址开始,所以微程序的人口地址0是由硬件控制的。当出现分支时,通过判别测试字段、微地址字段、和执行部件的反馈信息形成后即微地址。 Cpu设计步骤: 1.拟定指令系统 2.确定总体结构(数据通路) 3.安排时序
4.拟定指令流程。根据指令系统,写出对应所有机器指令的全部微操作机器 节拍安排,然后列出操作时间表 5.确定微指令的控制方式、下地址形成方式、微指令格式及微指令字长,编 写全部的微指令的代码,最后将编写的微指令放入控制存储器中。 微程序控制器的设计步骤 (1)设计微程序 确定微程序流程图,也就是控制算法流程图。 (2)确定微指令格式 微指令格式中的操作控制字段取决于执行部件的子系统需要多少微指令。假定采用直接控制方式,执行部件需要10个微命令,则操作控制字段需要10位。 测试判别字段取决于微程序流程图中有多少处分支转移。假定有3处分支,则测试判别字段需要3位。 下址字段取决于微程序流程图的规模。假定微程序共用50条微指令,则下址字段至少需要6位。这是因为ROM地址译码时,26=64,6位地址可容纳64条微指令。 (3)将微程序编译成二进制代码 (4)微程序写入控制存储器 (5)设计硬件电路 三、实验现象 --CPU 头文件 cpu_defs LIBRARY IEEE; USE cpu_defs IS --定义程序包,包头,包体
计算机科学与技术系 实验报告 专业名称计算机科学与技术 课程名称计算机组成原理 项目名称微程序控制器实验 班级
学号 姓名 同组人员 实验日期 一、实验目的与要求 实验目的 (1)掌握微程序控制器的组成原理 (2)掌握微程序控制器的编制、写入,观察微程序的运行过程 实验要求 (1)实验之前,应认真准备,写出实验步骤和具体设计内容,否则实验效率会很低,一次实验时间根本无法完成实验任务,即使基本做对了,也很难说懂得了些什么重要教学内容; (2)应在实验前掌握所有控制信号的作用,写出实验预习报告并带入实验室; (3)实验过程中,应认真进行实验操作,既不要因为粗心造成短路等事故而损坏设备,又要仔细思考实验有关内容,把自己想不明白的问题通过实验理解清楚; (4)实验之后,应认真思考总结,写出实验报告,包括实验步骤和具体实验结果,遇到的问题和分析与解决思路。还应写出自己的心得体会,也可以对教学实验提出新的建议等。实验报告要交给教师评阅后并给出实验成绩; 二、实验逻辑原理图与分析 画实验逻辑原理图
逻辑原理图分析 微程序控制器的基本任务是完成当前指令的翻译个执行,即将当前指令的功能转换成可以控制的硬件逻辑部件工作的微命令序列,完成数据传送和各种处理操作。 它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示成为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,称为控制存储器。 三、数据通路图及分析(画出数据通路图并作出分析) (1)连接实验线路,检查无误后接通电源。如果有警报声响起,说明有总线竞争现象,应关闭电源,检查连线,直至错误排除。 (2)对微控制器进行读写操作,分两种情况:手动读写和联机读写。 1、手动读写
微机原理实验报告 学院:算机科学与软件教育学院 1. 掌握存储器读写方法 2. 了解存储器的块操作方法 二、实验原理 存储器读写和块操作 三、实验设备仪器及材料 计算机,WA VE 6000软件 四、实验过程 S1.asm 代码流程图 data segment Block db 256 dup(55h) data ends code segment assume cs:code, ds:data start proc near mov ax, data mov ds, ax mov bx, offset Block ; 起始地址 mov cx, 256 ; 清256 字节Again: mov [bx], byte ptr 0 inc bx ; 地址+1 Loop Again ; 记数减一jmp $ ;死循环code ends end start
五、实验步骤 (1) 进入Wave6000,输入程序并检查,保存程序。 (2) “编译”程序。 (3) “全速执行”程序。 (4) “暂停”程序运行,在“数据窗口(MEMOREY)”查看0400H起始的单元内容,并记录。 (5) 在指令“jmp $”处设断点。“全速执行”程序。 (6) 在“数据窗口(MEMOREY)”查看0400H起始的单元内容,记录并分析实验结果。 六、实验结果及总结 运行前:运行后: 2、调试:如何将存储器块的内容置成某固定值(例全填充为0FFH)? 总结:通过本实验,我了解到单片机读写存储器的读写方法,同时也了解到单片机编程,调试方法。学会内存的移动方法,也加深对存储器读写的认识。
微机原理实验报告 学院:算机科学与软件教育学院 实验 课程 名 微机原理实验成绩实验 项目名称实验二、二进制到BCD码转换 指导老 师 1. 了解BCD值和ASCII值的区别。 2. 了解如何将BCD值转换成ASCII值。 3. 了解如何查表进行数值转换及快速计算。 二、实验原理 ASCII码表 三、实验设备仪器及材料 计算机,WA VE 6000软件 data segment Result db 3 dup(?) data ends code segment assume cs:code, ds:data start proc near mov ax, data mov ds, ax mov ax, 123 mov cl, 100 div cl mov Result, al ; 除以 100, 得百位数 mov al, ah mov ah, 0 mov cl, 10 div cl mov Result+1, al ; 余数除以 10, 得十位数 mov Result+2, ah ; 余数为个位 数 jmp $ code ends end start 代码流程图
信息与通信工程学院 微原硬件实验报告 姓名: 班级: 学号: 班内序号: 【一.基本的I/O实验】 实验一 I/O地址译码 一、实验目的 掌握I/O地址译码电路的工作原理。 二、实验原理和内容 1、实验电路如图1-1所示,其中74LS74为D触发器,可直接使用实验台 上数字电路实验区的D触发器,74LS138为地址译码器。译码输出端Y0~Y7在实验台上“I/O地址“输出端引出,每个输出端包含8个地址,Y0:
280H~287H,Y1:288H~28FH,……当CPU执行I/O指令且地址在280H~2BFH范围内,译码器选中,必有一根译码线输出负脉冲。 例如:执行下面两条指令 MOV DX,2A0H OUT DX,AL(或IN AL,DX) Y4输出一个负脉冲,执行下面两条指令 MOV DX,2A8H OUT DX,AL(或IN AL,DX) Y5输出一个负脉冲。 图1-1 利用这个负脉冲控制L7闪烁发光(亮、灭、亮、灭、……),时间间隔通过软件延时实现。 2、接线: Y4/IO地址接 CLK/D触发器 Y5/IO地址接 CD/D触发器 D/D触发器接 SD/D角发器接 +5V Q/D触发器接 L7(LED灯)或逻辑笔 三、硬件接线图及软件程序流程图 1.硬件接线图 2.软件程序流程图
四、源程序 DATA SEGMENT DATA ENDS STACK SEGMENT STACK 'STACK' DB 100H DUP(?) STACK ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,SS:STACK ;基本框架;延时子程序 DELAY1 PROC NEAR MOV BX,500H PUSH CX LOOP2: MOV CX,0FFFH WAIT1: LOOP WAIT1 DEC BX JNZ LOOP2 POP CX RET DELAY1 ENDP START: MOV CX,0FFFFH ;L7闪烁控制 LOOP1: MOV DX,2A0H ;灯亮 OUT DX,AL CALL DELAY1 MOV DX,2A8H ;灯灭 OUT DX,AL CALL DELAY1 LOOP LOOP1 ;循环闪烁 CODE ENDS END START 五、实验结果 灯L7闪烁 实验二简单并行接口 一、实验目的 掌握简单并行接口的工作原理及使用方法。(选择273进行实验)二、实验原理和内容
实验一 实验目的:假设基带信号为m(t)=sin(2000πt)+2cos(1000πt),载波频率为20kHz,请仿真出AM,DSB-SC,SSB信号,观察已调信号的波形和频谱。 1.AM信号: (1)信号的表达式 (3)流程图 AM信号 s= (1+0.3*m).*cos(2*pi*fc*t); 绘制时域波形及频谱 傅氏变换S= t2f(s,fs) (2)源代码 %AM信号的产生 fs= 800; %采样频率KHz T= 200; %截短时间ms N= T*fs; %采样点数 dt= 1/fs; t= [-T/2:dt:T/2-dt]; df= 1/T; f=[-fs/2:df:fs/2-df]; fm= 1; % kHz fc= 20; % kHz m= sin(2*pi*fm*t)+2*cos(1*fm*pi*t); s= (1+0.3*m).*cos(2*pi*fc*t); %AM 信号 S= t2f(s,fs); figure(1) plot(f,abs(S1)) title('AM信号频谱') xlabel('f') ylabel('S(f)') axis([-25,25,0,max(abs(S1))]); %xset('window',2)figure(2) plot(t,s1) title('AM信号波形') xlabel('t') ylabel('s(t)') axis([-3,3,-3,3]); (4)实验结果
精选文库 -3 -2-1 0123 -3-2 -1 1 2 3 AM 信号波形 t(ms) s (t ) -25 -20 -15 -10 -5 05 10 15 20 25 0102030405060708090 100AM 信号频谱 f(kHz) S (f )
微网系统接入系统验收试验标准 (大纲) 1 范围 与微网系列标准同。 对于其它容量或通过其它电压等级与电网连接的微网,也可参照本规定。 2 规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 3 术语和定义 本标准采用下列定义和术语。 3.1 微(电)网micro grid(MG) 微(电)网是由微电源、负荷、网架、监控和保护自动装置等构成,通过公共连接点与电网连接,可实现并网运行和孤岛运行的小型可控发配电系统。 3.2 微(电)源micro-power 微网中的电源,包括发电单元和储能单元,主要向微网内的负荷提供电能。微电源可包括内燃机、柴油机、微型燃气轮机、小水电机组、风力发电机组、太阳能光伏发电系统、燃料电池、生物质发电机组、及储能装置等。 3.3电网power grid 1
电网指公共电网,是输、配电的各种装置和设备、变电站、电力线路或电缆的组合。它把分布在广阔地域内的发电厂和用户联接成一个整体,把集中生产的电能配送到众多分散的电力用户。 在本标准中特指供电区电力变压器次级输出到微网或用户端的输电网络。 3.4公共连接点point of common coupling(PCC) 在本标准中专指微网与电网的公共连接处。 3.5并网设备interconnection devices 将微网和电网相连接的所有设备的集合。 图1给出了上述术语的关系。 图1 术语关系 3.6 并列过程 3.7 并列时间closing time 所有参数处于并网允许范围内到微网与电网可靠连接的时间。 3.8 并网运行interconnection operation 微网接入电网后的并列运行状态。 3.9 解列过程 微电网解列过程包括主动解列过程和被动解列过程。 主动解列过程是指外部电网正常运行,微电网并网运行时,微电网并网设备接收外部解列指令后,断开与外部公共电网的连接,微电网转入独立运行状态的过程。 被动解列过程是指微电网并网运行时,外部电网发生故障,微电网并网设备检测到外部电网故障,并主动断开与外部公共电网的连接,微电网转入独立运行状态的过程。 3.10 解列时间splitting time 解列命令发出到微网与电网可靠断开连接的时间。 对于主动解列过程,是指解列指令发出到微电网并网设备断开与外部公共电网的链接,微电网转入独立运行状态的时间。对于被动解列,解列时间是指,外部电网发生故障,微电网并网设备检测到外部电网故障,并主动断开与外部公共电网连接的时间。 2
微程序控制器实验报告记录
————————————————————————————————作者:————————————————————————————————日期:
计算机科学与技术系 实验报告 专业名称计算机科学与技术 课程名称计算机组成与结构 项目名称微程序控制器实验 班级 学号 姓名 同组人员无 实验日期 2015-11-11
一、实验目的 1.掌握微程序控制器的组成原理; 2.掌握微程序的编制、写入、观察微程序的运行情况。 二、实验逻辑原理图与分析 2.1 实验逻辑原理图及分析 微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制硬件逻辑部件工作的微命令序列,以完成数据传输和各种处理操作。它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,该存储器称为控制存储器,如图所示: 微程序控制器组成原理框图 控制器是严格按照系统时序来工作的,因而时序控制对于控制器的设计是非常重要的,从前面的实验可以很清楚地了解时序电路的工作原理。本实验所用的时序单元来提供,分为四拍TS1、TS2、TS3、TS4。 在微程序控制器的组成中,控制器采用3片2816的E^2PROM,具有掉电保护功能,微命令寄存器18位,用两片8D触发器(273)和一片4D(175)触发器组成。为地址寄存器6位,用三篇正沿触发的双D触发器(74)组成,他们带有清“0”端和预置端。在不判别测试的情况下,T2时刻打入微地址寄存器的内容即为吓一条微指令地址。当T4时刻惊醒测试判别式,转移逻辑满足条件后输出的负脉冲通过强置端将某一触发器置为“1”状态,完成地址修改。
姓名 学号 班级 ******************年级 指导教师 《计算机组成原理》实验报告 实验名称微程序控制单元实验、指令部件模块实验、时序与启停实验 实验室实验日期 实验七微程序控制单元实验 一、实验目的 ⒈ 掌握时序产生器的组成方式。 ⒉ 熟悉微程序控制器的原理。 ⒊ 掌握微程序编制及微指令格式。 二、实验原理 图 7- 7- 1
图 7-7-4 微地址控制原理图 微程序控制单元实验原理就是人为的给出一条微指令的地址,人为的去打开测试开关,观察机器怎么运行,打个比方就是我要你执行我下的某条命令,我先告诉你命令写在哪页纸上, 你找到纸后,分析命令是什么之后再去执行。 观察机器微程序控制器的组成见图7-1-1 ,微地址的打入操作就是由操作者给出一条微指令 的地址(同上面的例子就是仅仅告诉你我让你跑的这条命令写在哪页纸上,而没有告诉你 命令的具体内容),不需要做测试去判断这是什么指令,所以由图7-7-1 ,其中微命令寄存器 32 位,用三片 8D 触发器 (273) 和一片 4D(175) 触发器组成。它们的清零端由CLR来控制微控制器的清零。它们的触发端CK接 T2,不做测试时 T2 发出时钟信号,将微程序的内容 打入微控制寄存器(含下一条微指令地址)。打入了微指令的地址(即告诉你命令在哪页纸上,此时你需要先找到这页纸并判断命令是叫你做什么,然后执行),进行测试,T4 发出时钟信号,转移逻辑满足条件后输出的负脉冲通过置位端将某一触发器输出端置为“1”状态,按图 7-7-4 所示,微地址锁存器的置位端R 受 SE5~SE0控制,当测试信号 SE5~SE0输出负脉冲时,通过锁存器置位端R将某一锁存器的输出端强行置“1”,实现微地址的修改与转移,此时的地址指的是指令的操作码的地址(即你已经知道命令是跑,此时做的是跑的行为)。再由数据开关置入微地址的值,再做测试,再跳到指令的操作码的地址准备开始执行 指令,这就是微程序控制单元实验的原理。
实验一: 16QAM调制与解调 一、实验目的 1、熟悉16QAM信号的调制与解调,掌握SYSTEMVIEW软件中,观察眼图与星座图的方 法。 2、强化SYSTEMVIEW软件的使用,增强对通信系统的理解。 二、实验原理 1、16QAM 16QAM是指包含16种符号的QAM调制方式。 16QAM 调制原理方框图: 图一16QAM调制框图 16QAM解调原理方框图: 图二16QAM解调框图 16QAM 是用两路独立的正交 4ASK 信号叠加而成,4ASK 是用多电平信号去键控载波而得到的信号。它是 2ASK 体制的推广,和 2ASK 相比,这种体制的优点在于信息传
输速率高。 正交幅度调制是利用多进制振幅键控(MASK)和正交载波调制相结合产生的。 16 进制的正交振幅调制是一种振幅相位联合键控信号。16QAM 的产生有 2 种方法: (1)正交调幅法,它是有 2 路正交的四电平振幅键控信号叠加而成; (2)复合相移法:它是用 2 路独立的四相位移相键控信号叠加而成。 在这里我们使用第一种方法。 16QAM信号的星座图: 图三16QAM星座图 上图是16QAM的星座图,图中f1(t)和f2(t)是归一化的正交基函数。各星座点等概出现。 星座图中最近的距离与解调误码率有很密切的关系。上图中的最小距离是dmin=2。 16QAM的每个星座点对应4个比特。哪个星座点代表哪4比特,叫做星座的比特映射。通常采用格雷映射,其规则是:相邻的星座点只差一个比特。 实验所需模块连接图如下所示: 图四模块连接图 各个模块参数设置:
三、实验步骤 (1)按照实验所需模块连接图,连接各个模块 (2)设置各个模块的参数: ①信号源部分:PN序列发生器产生双极性NRZ序列,频率10HZ 图五信号源设置示意图 ②载频:频率设置为100Hz。
微程序控制器实验报告 一、实验目的 (1)掌握微程序控制器的功能、组成知识。 (2)掌握为程序的编制、写入、观察微程序的运行 二、实验设备: PC机一台,TD-CM3+实验系统一套 三、实验原理: 微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制的硬件逻辑部件的为命令序列,完成数据传送和个汇总处理操作,他的执行方法是将控制各部件的微命令的集合进行编码,即将微命令的集合仿照及其指令一眼,用数字代码的形式表示,这种表示陈伟微指令。这样就可以用一个微指令序列表示一条机器指令,这种为指令序列称作为程序。微程序存储在一种专用的存储器中,成为控制储存器 四、实验步骤 1.对为控制器进行读写操作: (1)手动读写: ①按图连线:
②将MC单元编程开关置为“编程”档,时序单元状态开关置为“单步”档,ADDR 单元状态开关置为“置数”档 ③使用ADDR单元的低六位SA5…SA0给出微地址MA5…MA0,微地址可以通过MC 单元的MA5…MA0微地址灯显示 ④CON单元SD27…SD20,SD17…SD10,SD07…SD00开关上置24位微代码,待写入值由MC单元的M23…M024位LED灯显示 ⑤启动时序电路(按动一次TS按钮),即将微代码写入到E2PROM2816的相应地址对应单元中 ⑥重复③④⑤三步,将下图微代码写入2816芯片中 二进制代码表 (2)联机读写: ①将微程序写入文件,联机软件提供了微程序下载功能,以代替手动读写微控制器,但微程序得以指定的格式写入 本次试验的微程序如下: ://************************************************************// :// // :// 微控器实验指令文件 // :// // ://************************************************************// ://***************Start Of MicroController Data****************//
经济管理学院信息管理与信息系统专业班 __组学号 姓名协作者教师评定_____________ 实验题目_ 微程序控制器实验_________________ 1.实验目的与要求: 实验目的:1.理解时序产生器的原理,了解时钟和时序信号的波形; 2.掌握微程序控制器的功能、组成知识; 3掌握微指令格式和各字段功能; 4.掌握微程序的编制、写入、观察微程序的运行,学习基 本指令的执行流程。 实验要求:按练习一要求完成测量波形的操作,画出TS1、TS2、TS3、TS4的波形,并测出所有的脉冲Φ的周期。按练习二的要 求输入微指令的二进制代码表,并单步运行五条机器指 令。 2.实验方案: 1.用联机软件的逻辑示波器观测时序信号: 测量Φ、TS1、TS2、TS3、TS4信号的方法: (1)按图接线,接一根即可; (2)把探笔的探头端按颜色分别插到试验仪左上角的CH1、CH2,黑探头插CH1,红探头插CH2,将黑探笔的探头插在Φ接线的上孔,将红探笔的探针夹在TS1两针之间; (3)将实验仪的STOP开关置为RUN、STEP开关置为EXEC,“SWITCH UNIT”中CLR开关置为1状态,按动START按键; (4)启动“组成原理联机软件”,点击“调试”菜单下的“显示逻辑示波器窗口”,点击示波器开关,即可在屏幕上看到波形。使用“步数”或“速度”调整波形,波形调整好后,不要用同步通道来稳定波形,应该单击示波器开关,这样整个波形都停下来;(5)鼠标停留在波形线上,会有时间提示,两者相减可以算出波形周期; (6)测完Φ和TS1后,接着测量TS1和TS2,把黑红探针分别夹在TS1两根针之间和TS2两根针之间,相互比较,可以测量TS1 和TS2之间相位关系。同理通过测量TS2、TS3可以测量出TS2