FP0高速脉冲输出功能
脉冲输出功能
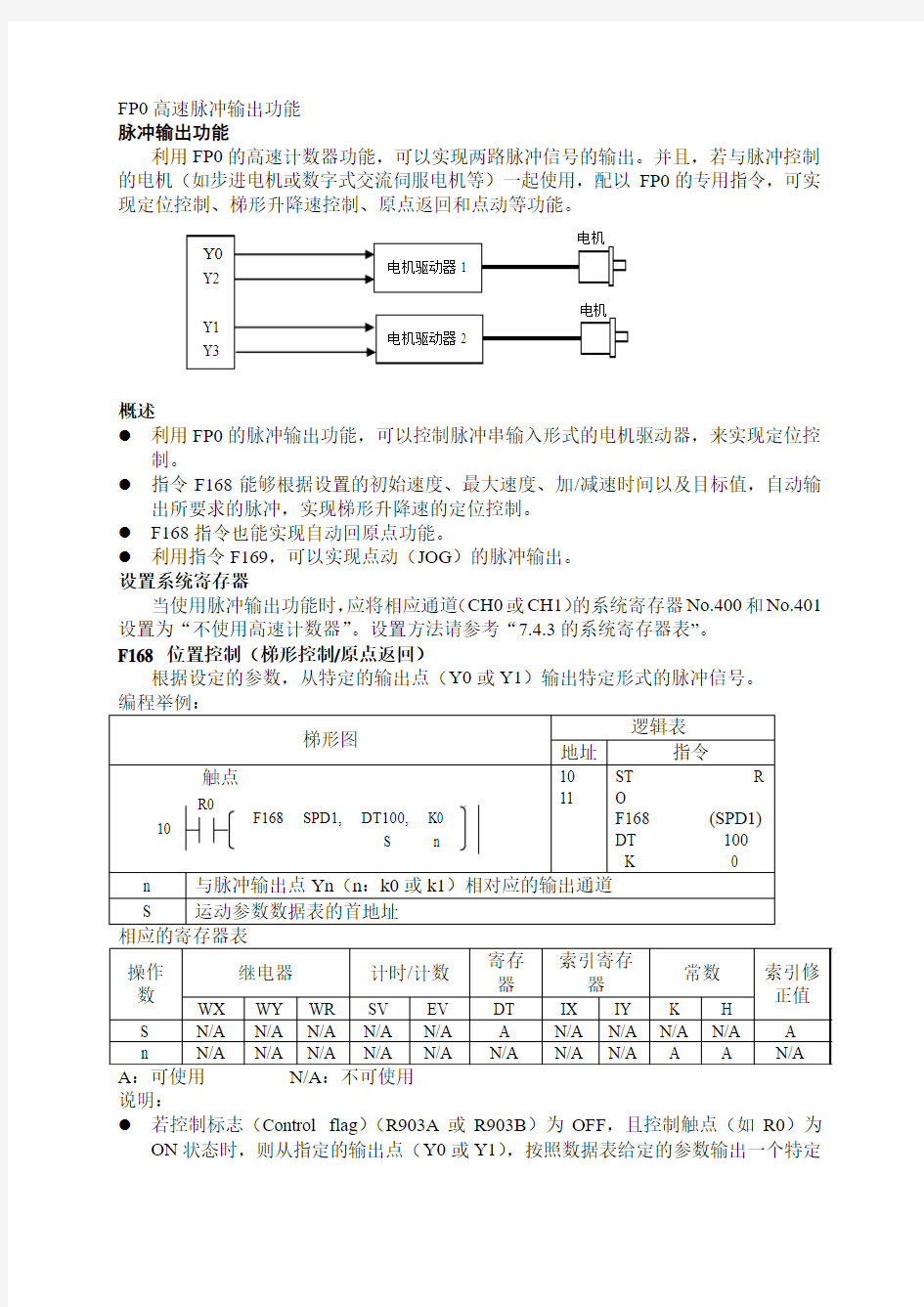
利用FP0的高速计数器功能,可以实现两路脉冲信号的输出。并且,若与脉冲控制的电机(如步进电机或数字式交流伺服电机等)一起使用,配以FP0的专用指令,可实现定位控制、梯形升降速控制、原点返回和点动等功能。
概述
●利用FP0的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控
制。
●指令F168能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动输
出所要求的脉冲,实现梯形升降速的定位控制。
●F168指令也能实现自动回原点功能。
●利用指令F169,可以实现点动(JOG)的脉冲输出。
设置系统寄存器
当使用脉冲输出功能时,应将相应通道(CH0或CH1)的系统寄存器No.400和No.401设置为“不使用高速计数器”。设置方法请参考“7.4.3的系统寄存器表”。
F168 位置控制(梯形控制/原点返回)
根据设定的参数,从特定的输出点(Y0或Y1)输出特定形式的脉冲信号。
说明:
●若控制标志(Control flag)(R903A或R903B)为OFF,且控制触点(如R0)为
ON状态时,则从指定的输出点(Y0或Y1),按照数据表给定的参数输出一个特定
形式的脉冲串。
● 数据表用于指定位控运动的控制码、起始速度、最大速度、加速/减速时间或目标值
等。
● 根据加/减速时间,输出频率从起始速度升到最大速度。
?运行模式说明:
● 增量模式<相对值控制>
根据目标的设置设定值,来输出相应脉冲数的脉冲。
将控制码(Control code )设置为H02(即:增量模式;正向:OFF ;反向:ON ),当目标值为正时,方向信号输出为OFF ,同时高速计数器的当前值增加。当目标值为负时,方向信号输出为ON ,同时高速计数器的当前值减少。当控制码(Control code )设置为H03时,方向信号输出则和前述情况的相反。
● 绝对模式〈绝对值控制〉 根据当前值和目标值的设置不同,输出脉冲(当前值与目标值之差为输出的脉冲数)。 将控制码(Control code )设置为H12(即:绝对值;正向:OFF ;反向:ON ),当当前值比目标值小时,方向信号输出为OFF ,同时高速计数器的当前值增加;当当前值比目标值大时,方向信号输出为ON ,同时高速计数器的当前值减少。若将控制码(Control code )设置为H13,则方向信号输出与前述情况相反。 ● 原点返回模式 在原点信号(X0或X1)输入之前,脉冲将连续输出。为了在接近原点时进行减速(以减少过冲或冲击),当接收到原点接近信号时,应将DT9052的相应位设置为OFF →ON →OFF ,以实现减速。在返回原点模式中,仅仅用到数据表中的控制码、起始速度、最大速度和加速/减速时间。
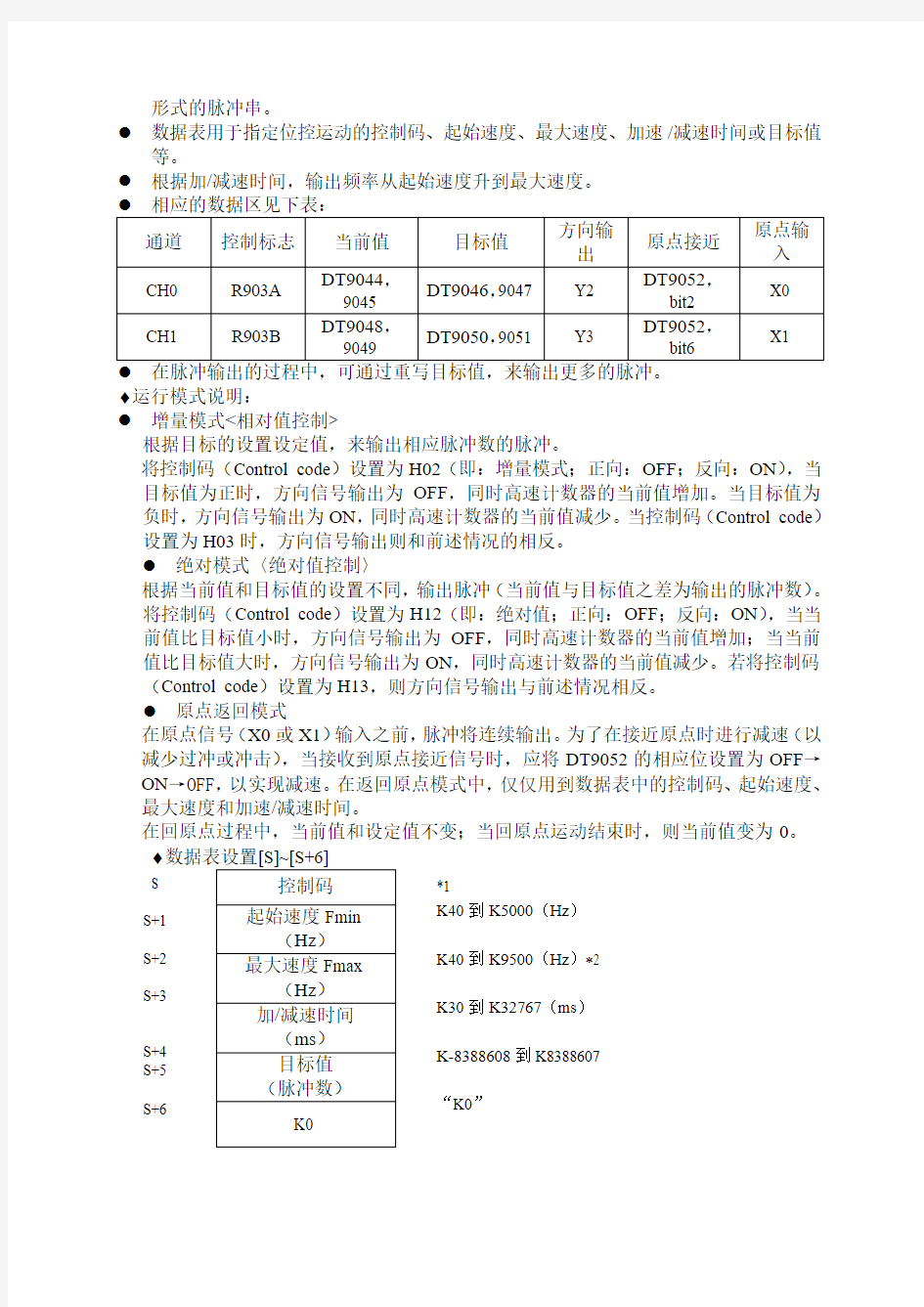
在回原点过程中,当前值和设定值不变;当回原点运动结束时,则当前值变为0。 ? S S+1 S+2 S+3 S+4 S+5 S+6
*1
K40到K5000(Hz )
K40到K9500(Hz )*2
K30到K32767(ms )
K-8388608到K8388607
“K0”
*1:控制码(Control code )是由常数H 来确定的。
*2:当脉冲宽度被设置为占空比为50%时,最大输出频率是6KHz 。当脉冲宽度被设置为固定脉宽时(大约80us ),最大频率为9.5KHz 。
在执行指令F168时,若设有脉冲输出,故障查找的方法请参考6-32页。 应用举例:
H
间
R 1
[ F0 MV ,H2,DT0 ]
[ F0 MV ,K1000,DT1 ]
[ F0 MV ,K7000,DT2 ]
[ F0 MV ,K3000,DT3 ] [ F1 DMV ,K100000,DT4 ] [ F0 MV ,K0,DT6 ]
[ F168 SPD1,DT0,K0
]
R0
F169(PLS)脉冲输出指令(点动)
从指定输出点(Y0或Y1)输出指定参数的脉冲。
?举例说明
●若相应通道的控制标志为OFF,且控制触点为ON时,则从特定的输出点(Y0或
Y1)输出一个脉冲串。脉冲串是在控制触点为ON的同时输出的。
●若在控制码中设置为增量计数或减量计数方式时,则该指令可用作一个点动操作指
令。对于情况,可以将控制码设置为H12(增量,方向输出OFF)或H22(减量,方向输出ON);
●在每次扫描中,频率和占空比都可以进行改变。(这条指令执行以后,设置的参数对
下一个脉冲仍有效)。
●
●时,则脉冲停止。 ● 在使用减数计数方式时,若当前值超出HFF800000时,则脉冲停止。 ● 在运行期间,可以进行一个重写操作,在重写过程中输出脉冲停止。 ?数据表设置
*1:控制码是由常数H 来设置的 功能和约束条件
通道 同一通道不能用于一种以上的功能. <应用限制举例>
你不能将CH0通道既用于高速计数又用于脉冲输出功能.输入/输出口序号<输入/输出出触点>
● 每一功能的相应通道 不能用于一般的输入输出出. <
应用限制举例
>.
?当用CH0作为两相输入的高速计数功能时,不能让X0和X1作为一般的输入口. ?当用Y0作为脉冲输出时,不能将输入端X0作为一般的输入口 ?当Y0作为脉冲输出出<作为定向输出功能>功能时,不能将Y2<方向输出>作为一般的输入输出口.
● 当将高速计数器作为不能复位输入的模式使用时,不能将参数表括号中所到的输入
口作为一般的输入口<允许使用举例>
当高速计数器用不能复位和两相输入时,不能将X
2作为一般的输入口. 相关指令<F166到F170>执行的约束.
S S+1
*1
K40到K10,000(HZ )
H
●当任一与高速计数相关的指令<F166到F170>执行时,使用通道的对应
控制标志位<内部特殊寄存器R903A到R903D>ON:
●当一个通道的标志ON,用于同一通道的其它指令不能执行.<应用限制举例>――当执行F166<目标指相应于ON指令>和R903A处于ON状态时F167<目标指相应于OFF指令>不能在CH0通道执行.
最高计数速度/最高输出入脉冲频率限制.
●当作为高速计数器时计数速度将随表中列出的计数模式不同而变化.
<例1>
当处于增幅输入模式和使用CH
0和CH
1
两通道时,如果CH
1
是用的8KHZ,
那CH
1
能用到达2KHZ.<例2>
当处于两相输入模式和使用CH
0和CH
1
两通道时,如果CH
1
用的1KHZ.那么
CH
2
能用到2KHZ.
●当用作脉冲输出功能时,最高输出频率将随表中列出的输出触点数不同而变化.<例1>
当仅使用Y
0或Y
1
时,最高输出频率是非曲直10KHZ
<例2>
当使用Y
0和Y
0
两触点时,最高输出频率是5KHZ.
●当用作高速计数功能和脉冲输出出功能时参数将随使用条件不同而异.
<例>
当将一脉冲输出触点的最高输出出频率定5KHZ时,同步使用的高速计数器最高计数速度是增幅模式为5KHZ;两相模式是非曲直1KHZ.
I/0口分配及其线路
对于单脉冲输入的驱动器(脉冲输入和方向输入):
●一个输出点用作单脉冲输出,而另一个用作方向输出;
●脉冲输出点、方向输出点、以及原点输入点的I/O分配,由所选定的通道来确定。
●原点接近开关信号,输入到所分配的输入点(如X2)时,置位(ON)和清除(OFF)
DT9052的特定位来启动减速。
<选CH0通道时>
*原点接近开关输入点可自由选择,例如X2。
<选CH1通道时> 对于双脉冲输入的驱动器(CW 脉冲输入和CCW 脉冲输入):
* 当使用双脉冲输入的驱动器时,方向的切换开关必须由外部继电器完成。 * 一个输出点被用作脉冲输出的方向切换。
* 脉冲输出点和原点输入点的I/O 分配取决于所使用的通道。 * 将指令F168的控制码设置为“无方向输出”(参考“F168指令”)。 <选CH0通道时>
使用双脉冲输入驱动器时应注意: * 不能直接把FP0的Y0和Y1直接与驱动器的CW 和CCW 输入口相连。
6.4.4脉冲输出功能使用的指令。
FP0
驱动器
错误!
*原点接近开关输入点可自由选择,例如X3。
*X2或其他要求的输入口可定义为零点接近输入
**Y4或其它的输入口可用作继电器触发。同时,继电器必须在所有动作之前切换。
定位控制指令(F168)
*按照特定的数据表自动地完成梯形速度的定位控制。
X3
(DF)[ F0 MV,H102,DT100 ]
[ F0 MV,K500,DT101 ]
[ F0 MV,K5000,DT102 ]
[ F0 MV,K200,DT103 ]
[ F1 DMV,K10000,DT104 ]
[ F0 MV,K0,DT106 ]
[ F168 SPD1,DT100,H0 ]
从输出点Y0产生一个初始频率500Hz,最高频率5000Hz的脉冲,加/减速时间为200毫秒,移动距离为10000个脉冲的脉冲串。
此时高速计数器的经过值(DT9044和DT9045)增加。
注意:?对于梯形速度的位置控制,设置的初始频率不能超过5000Hz。
?在执行指令F168时,若没有脉冲输出,请参考6-32页排除故障。
脉冲输出指令(F169)
*当选定的输入点为ON时,该指令输出一个脉冲串,执行点动(JOG)操作。
X2
[ F0 MV,H112,DT200 ]
[ F0 MV,K300,DT201 ]
[ F169 PLS,DT200,H0 ]
当X2为ON时,Y0输出一个频率为300HZ、占空比为10%的脉冲串。此时,方向信号输出(Y2)为OFF,且高速计数器CH0的经过值(DT9044和DT9055)增加。
当X6为ON时,Y1输出一个频率为700HZ、占空比为10%的脉冲串。此时,方向信号输出(Y3)为OFF,且高速计数器CH1(DT9048和DT9049)的经过值减少。
X6
[ F0 MV,H112,DT200 ]
[ F0 MV,K700,DT201 ]
[ F169 PLS,DT200,H1 ]
高速计数器控制指令(F0)
*该指令被用作内部高速计数器的复位,停止脉冲输出,并设置或复位零点接近的输入。
*指定该指令与特殊数据寄存器DT9052同时使用。
*一旦该指令被执行,则其设置将保持,直到该指令再次被执行。
该指令可完成的操作:
●清除高速计数器指令F166到F170的控制。
●零点返回运行模式中,零点接近信号的处理。
《例1》在零点返回运行模式中,使能零点接近输入,并开始减速。
X3
(DF)[ F0 MV,H4,DT9052禁止硬件复位 ] …①
[ F0 MV,H0,DT9052 不進行軟件复位] …②
X7
(DF)[ F0 MV,H8,DT9052停止脈沖清除指令]
[ F0 MV,H0,DT9052 ]
在上面的程序中,零点接近输入在第①步中置位,随后在第②步中置0,从而完成零点接近信号的设置。
《例2》强制终止脉冲输出。
经过值修改和读取指令(F1)
*该指令用于读取内部高速计数器的脉冲数。
*定义该指令用于专门的数据寄存器DT9044。
*经过值以32位形式贮存在专用数据寄存器DT9044和DT9045中。
*可用F1(DMV)指令来设置经过值。
《例1》设置高速计数器的初始值为K3000(例如经过值的改变)。
X7
(DF)[ F1 DMV,K3000,DT9044 ]
《例2》读取高速计数器的经过值,并把它复制到DT100
X7
(DF)[ F1 DMV,DT9044,DT100 ]
《参考》每次次执行ED指令,经过值会自动地从经过值区域传送到专用数据寄存器DT9044和DT9045。
6.4.5位置控制例子
线路举例
FP0
注意:当步进电机输入为5V光耦类型时,串入一个2KΩ,1/4W的电阻。
当X1变为ON 状态时,Y0输出脉冲,同时,方向输出Y2为OFF 。
X1 R903A R12 R10 (DF
) [ ] 位置动作运行
R10
R10 R11 (DF ) [ ] 位置动作开始
R11 [ F0 MV ,H102,DT100 ] [ F0 MV ,K500,DT101 ]
[ F0 MV ,K5000,DT102 ] [ F0 MV ,K200,DT103 ] [ F1 DMV ,K10000,DT104 ]
[ F0 MV ,K0,DT106 ] [ F168 SPD1,DT100,H0 ]
R903A R10 T0 R12 (DF/) [ ]
R12 TMX 10
(负向) (正向)
当X2变为ON 时,Y0输出脉冲,同时方向输出Y2为ON 。
X2 R903A R22 R20 (
DF ) [ ] 位置动作运行 R20 R20 R21 (DF )
[ ] 位置动作开始 R21 [ F0 MV ,H102,DT100 ] [ F0 MV ,K1000,DT101 ] [ F0 MV ,K6000,DT102 ]
[ F0 MV ,K300,DT103 ] [ F1 DMV ,K-8000,DT104 ] [ F0 MV ,K0,DT106 ]
[ F168 SPD1,DT100,H0 ] R903A R20 T1 R22 (DF/) [ ] R22 TMX 10 1
(负向) (正向) 300msec 300msec
绝对模式定位动作
X1 R903A R32 R30 (DF ) [ ] 位置动作运行 R30 R30 R31 (DF ) [ ] 位置动作开始 R31 [ F0 MV ,H112,DT100 ] [ F0 MV ,K1000,DT101 ] [ F0 MV ,K4000,DT102 ]
[ F0 MV ,K250,DT103 ]
[ F1 DMV ,K22000,DT104 ]
[ F0 MV ,K0,DT106 ]
[ F168 SPD1,DT100,H0 ] R903A R30 T3 R32 (DF/) [ ] R32 TMX 10 2 (负向) (正向)
当X3为ON ,Y0输出脉冲,原点返回开始,同时,方向输出Y2为ON ;当X4为ON 时,减速开始;当X0为ON 时,原点返回结束(此时,当前值数据寄存器DT9044和DT9045清零)。
X3 R903A R42
R40 (DF )
[ ]
原点返回触发
R40
R40 R41 (DF ) [ ] 回原点运动开始
R41
[ F0 MV ,H123,DT200 ] [ F0 MV ,K100,DT201 ] [ F0 MV ,K2000,DT202 ]
[ F0 MV ,K150,DT203 ]
[ F168 SPD1,DT200,H0 ]
R903A R40 T3 R42
(DF/) [ ] 回原点结束 R42 TMX 10 3 X4 (DF ) [ F0 MV ,H4,DT9052 ] 原点接近,开始减速 [ F0 MV ,H0,DT9052 ]
(负向)
(正向)
X0 X4
原点 原点接近
原点接近开关 原点传感器
当X3为ON ,Y0输出脉冲,并且原点返回开始,同时,方向输出Y2为OFF ;当X4为ON 时,减速开始,当X0为ON ,原点返回结束(此时,当前值寄存器DT9044和
DT9045
清零)。
X3
R903A R52
R50 (DF ) [ ]
原点返回触发
R50
R50 R51
(DF ) [ ] 回原点动作开始
R51
[ F0 MV ,H122,DT200 ] [ F0 MV ,K120,DT201 ] [ F0 MV ,K2500,DT202 ]
[ F0 MV ,K100,DT203 ]
[ F168 SPD1,DT200,H0 ]
R903A R50 T4 R52
(DF/) [ ] 回原点结束 R52 TMX 10 4 X4 (DF ) [ F0 MV ,H4,DT9052 ] 原点接近,开始减速 [ F0 MV ,H0,DT9052 ]
(负向)
(正向)
X0 X4 原点 原点接近
原点接近开关 原点传感器
当X5为ON 时,Y0输出脉冲。同时,方向输出Y2为OFF 。
JOG 动作(负向)
当X6为ON 时,Y0输出脉冲,同时,方向输出Y2为ON 。
紧急制动(限位保护)
假如在Y0输出脉冲时X7由ON 变为OFF ,输出脉冲停止。
X5
电机 Y0脉冲
X6
(-)
(+)
X6 Y0脉冲
X7
(DF/
在执行指令F168(SPD1)而无脉冲输出时的查错流程
高频脉冲交流环节逆变器控制策略 摘要:为克服高频脉冲交流环节逆变器存在的电压过冲现象,本文提出和研究了单极性、双极性移相控制策略。两类控制策略可分别使得逆变器功率器件实现ZVS或ZVZCS软开关,仿真和实验结果表明了控制策略的可行性。 1 引言 高频脉冲交流环节逆变器,如图1所示。该电路结构由高频逆变器(推挽式、半桥式、全桥式)、高频变压器、周波变换器(全波式、桥式)构成,具有电路拓扑简洁、双向功率流、两级功率变换(DC/HFAC/LFAC)、变换效率高等优点。 图1 高频脉冲交流环节逆变器电路结构 但这类逆变器在采用传统的PWM技术时,周波变换器器件换流将打断高频变压器漏感中连续的电流而造成不可避免的电压过冲。由于这个原因,这类方案都需采用一些缓冲电路或有源电压箝位电路来吸收存储在漏感中的能量。有源电压箝位电路是以增加功率器件数和控制电路的复杂性为代价的,故不十分理想。 因此,在不增加电路拓扑复杂性的前提下,如何解决高频脉冲交流环节逆变器固有的电压过冲问题和实现周波变换器的软换流技术,是高频环节逆变技术的一个研究重点。为此,本文提出和研究了单极性、双极性移相控制策略,可分别使得逆变器功率器件实现ZVS或ZVZCS软开关。 2 单极性移相控制原理 根据高频逆变器(推挽式、半桥式、全桥式)、周波变换器(全波式、桥式)的组合不同,高频脉冲交流环节逆变器具有6种电路拓扑,其中全桥全波式、全桥桥式电路如图2所示。 图2 全桥全波式和全桥桥式逆变器电路
图3单极性移相控制原理 以全桥全波式高频脉冲交流环节逆变器为例,其单极性移相控制原理,如图3所示。高频逆变器将输入电压Ui调制成双极性三态电压波uEF,周波变换器将此电压波解调为单极性SPWM波uDC,经输出滤波后得到正弦电压uo,周波变换器功率开关在uEF为零期间进行ZVS换流。逆变器右桥臂相对左桥臂存在移相角θ,而且输出滤波器前端电压uDC为单极性SPWM波,故为单极性移相控制。S1与S4、S2与S3之间在一个开关周期Ts内的共同导通时间为 Tcom=Ts(180o-θ)/ (2×180o )(1) 当输入电压Ui降低或负载变大时,导致输出电压uo降低,闭环反馈控制使得移相角θ减小、共同导通时间Tcom增大,从而使得输出电压增大。因此,调节移相角θ可实现输出电压的稳定。 实现单极性移相控制的方案为:1、将输出电压反馈信号uof与正弦基准电压uref比较放大后得到电压误差放大信号ue1,ue1与载波uc比较后得到信号k1,k1下降沿二分频、反相互补后分别得到功率开关S1、S3的驱动信号;2、将ue1反极性信号ue2与载波uc比较后得到信号k2,k2下降沿二分频、反相互补后分别得到功率开关S2、S4的驱动信号;3、将载波uc下降沿二分频、反相互补后分别得到功率开关S5(S6)、S7(S8)的驱动信号。 在逆变器稳态工作且输出滤波电感电流iLf连续时,一个高频开关周期Ts内可分为六个开关状态(以uDC>0时为例),如图4(a)~(f)所示。图4(a)、(b) 、(d)、(e)和图4 (c)、(f)可分别用图4(g)、(h)所示等效电路表示,其中r为包括变压器漏阻抗、功率开关通态电阻、滤波电感寄生电阻等在内的等效阻抗。
高速电磁阀 高速电磁阀也叫高速开关阀、高速电磁开关阀。是很多控制系统的关键执行元件, 例如在汽车制动防抱死系统(ABS) ,电控柴油喷射系统,无凸轮电控液压驱动气门系统上都需要具有大流量,快速响应的开关电磁阀.它通过接受电子控制单元的控制信号实现快速的启闭,额定流量和动作时间是衡量电磁阀的重要指标,其直接影响系统的稳定性和可控性,电磁阀的额定流量越大,响应时间越快,系统的控制精度和稳定性越好. 目录 ?高速电磁阀的发展概况 ?高速电磁阀的分类 ?高速电磁阀的特点 ?高速电磁阀的设计考虑 高速电磁阀的发展概况 ?国外早在50年代末就开始了数字阀的研制工作,但在1975年以前只限于实验室研究。高速电磁开关阀自二十世纪七十年
代问世以来,国内外许多厂家、公司,竞相研制出不少的型式结构,对高速开关阀的研究和应用已经成为液压界的一个重要课题。 英国最先开展高速开关阀研究,开发出两种特殊结构的高速开关阀,分别采用筒状、锥状的结构设计从而提高了阀体结构刚度,克服了传统电磁开关阀电磁作用力越大衔铁加速度越小的矛盾,使得当阀芯行程小于1mm时,阀的响应时间不大于 1ms。 美国公司则于1984年推出了一种三通球形高速电磁开关阀,该阀的响应时间为:开启时间3ms,关闭时间2ms,工作压力10Mpa。 德国一公司成功地开发出一种适用于超高压下工作的高速电磁开关阀,该阀的开启时间为0.3ms,关闭时间为0.65ms。德国另一公司研制响应时间为0.2ms,工作压力为135MPa的超高压高速电磁开关阀。 日本一公司研制的高速电磁开关阀,为三位四通滑阀结构,最高工作压力为50MPa,响应时间为1ms,。此类型高速开关阀的工作流量都甚小,需要的额定电磁力就较小。各有特点,各有不同的实用范围,需要根据系统对电磁阀的性能、安装尺寸的具体要求选择合适的电磁阀结构设计。
6.4 脉冲输出功能 本章节是对有关FP∑输出功能作了介绍 6.4.1 脉冲输出功能的概述 用到的指令和控制器 ●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。 ●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动 输出所要求的脉冲,实现梯形升降速的定位控制。 ●专用指令F171(SPDH)还能实现自动回原点功能。 ●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。目标值也可以被设置,以便脉冲 输出能在目标值匹配时停下来。 ●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。 ●专用指令F175(SPSH),能实现线性插补控制。通过指定合成速度,加/减速时间以及目标值, 这条指令使用线性插补控制实现脉冲输出。 ●专用指令F176(SPCH),能实现圆弧插补控制。用户可以从两种形成圆弧的方法中选择其一。 一种是指定经过的位置,另一种是指定一个圆心位置。通过指定不同的参数,脉冲使用圆弧插补实现输出。 注意: 直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。 设置系统寄存器 当使用脉冲输出功能时,应将相应通道的系统寄存器No.400和No.401设置为“不使用高速计数器”。
6.4.2 几种脉冲输出方式 正/反向脉冲 输出方式 在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲, 另一个为反向旋转脉冲 图84:FP ∑脉冲输出功能—CW/CCW 输出方式 脉冲+方向 输出方式(正向:关/反向:开) 在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转 方向。在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。 图85:FP ∑脉冲输出—脉冲+方向输出方式1 脉冲+方向 在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。 图86:FP ∑脉冲输出—脉冲+方向输出方式2
有限公司 质量管理制度 为了对公司承接的监理业务按照法律法规、规范和设计文件要求进行有效的监督管理,力求实现项目建设的质量目标,制订本制度。 第一条监理工程师控制工程质量的一般内容 1、审查承包单位的资质,确认分包。 2、明确质量标准和质量要求。 3、督促承包商建立和完善质量保证体系。 4、组织与建立监理项目的质量监控体系。 5、实施过程中,进行跟踪、监督、检查和控制。 6、组织或参加工程质量事故的处理。 第二条质量管理依据 1、国家及有关部门及监理项目(工程项目)所在地主管部门关于工程质量的法规及质量监督文件和规定。 2、承包合同中有关业主对工程质量要求的条款。 3、设计文件。 4、现行工程施工及验收规范。 5、现行工程质量检验评定标准。 6、经过批准的项目施工组织设计、施工方案。 第三条质量管理责任 1、实行公司和项目监理站两级质量责任制。
2、公司负责人对监理质量全面负责,项目监理站具体负责项目质量管理。 3、公司一级对质量管理的主要责任是:选派适当的项目总监理工程师和监理人员,监督检查项目监理工作,组织有关人员协助解决项目监理中的具体质量问题,制定和完善质量管理程序和规章办法。 4、项目监理站的质量责任是:根据有关质量控制的依据具体负责质量监理。 第四条质量管理组织保证 1、根据公司业务发展需要招聘监理人员,视项目需要,聘请质量监理人员。 2、组织公司监理业务人员学习有关质量管理的法律法规和文件,熟悉现行质量管理和验收的规范和标准。 3、加强质量管理,明确各岗位和有关人员质量责任制。 4、明确质量管理的信息流程。 第五条监理站质量监控准备 1、建立和完善组织,形成有效的质量监控组织保障。 2、编制项目监理规划和相应的监理实施细则,为有计划进行质量监理提供依据。 第六条施工准备阶段质量监控 1、检查承包商技术负责人和质量安全检查人员的到位情况;审查施工单位选择的分包单位的技术资质,对不符合分包工程施工技术资质要求、难以保证分包工程资质的分包施工单位,不得签字,并应
龙源期刊网 https://www.doczj.com/doc/e72517876.html, 高速开关阀的设计及数字仿真 作者:胡学青曹吉花王洪艳 来源:《数字技术与应用》2011年第07期 摘要:高速开关阀是20世纪80年代发展起来的一种具有响应速度快、结构简单、抗污染能力强、与电子电路配合好等特点的电液控制转换元件。只要控制脉冲频率或脉冲宽度,就能对流量进行连续的控制,高速开关阀是一种非常有前途的数字阀,发展这种数字元件将是工业现代化的必然选择。为了进一步提高高速开关阀的响应频率,降低其响应时间,改善其性能。 首先从高速开关阀的理论出发,研究和分析其结构、工作原理和磁场分布等,根据其电磁特性和机械特性,建立数学模型,然后将数学模型线性化,转化为传递函数方框图;结合MATLAB /Simulink仿真工具,先把数学模型转化为仿真模型,代入参数后,进行数字仿真,生成动、静态仿真曲线图。 关键词:高速开关阀脉宽调制信号数学模型数字仿真 中图分类号:TK428 文献标识码:A 文章编号:1007-9416(2011)07-0055-01 1、数学仿真 数学仿真就是用数学语言去表达一个物体,并编制程序在计算机上对实际物体进行研究的过程。这种数学表达就是数学模型。数学仿真把研究对象的结构特征或者输入输出关系抽象为一种数学描述〔微分方程、状态方程等)来研究,具有很大的灵活性,它可以方便地改变物体结构、参数;而且速度快,可以在很短的时间内完成实际物体很长时间的动态演变过程;精确度高,可以根据需要改变仿真的精度;重复性好,可以很容易地再现仿真过程。 2、模型的建立 我们利用simulink子系统技术来建立计算机仿真模型: 首先构建高速开关阀整体模型,由单位阶跃信号作为输入信号,经过高速开关阀仿真模型模块,输出的信号由示波器显示。 然后根据高速开关阀的简化方框图编辑高速开关阀仿真模型模块。 2.1 仿真模块参数设置 高速开关阀仿真模型建立之后,首先需要按照系统的要求设置仿真摸块的参数。
一、 S7-200 PLC 高速脉冲输出功能 1、概述 S7-200 有两个置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。 当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电 机的速度和位置的开环控制。置PTO 功能提供了脉冲串输出,脉冲周期和数量可由用户控制。但应用程序必须通过PLC内置I/O 提供方向和限位控制。 为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO 或位控模块的组态。向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。 2、开环位控用于步进电机或伺服电机的基本信息 借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下: ⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED) 图1是这2 个概念的示意图。 MAX_SPEED 是允许的操作速度的最大值,它应在电机力矩能力的范围。驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。 图1 最大速度和启动/停止速度示意 SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED 的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。如果SS_SPEED 的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和减速时间 加速时间ACCEL_TIME:电机从 SS_SPEED速度加速到MAX_SPEED速度所需的时间。减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。 图2 加速和减速时间 加速时间和减速时间的缺省设置都是1000 毫秒。通常,电机可在小于1000 毫秒的时间工作。参见图2。这2 个值设定时要以毫秒为单位。 注意:电机的加速和失速时间要过测试来确定。开始时,您应输入一个较大的值。逐渐减少这个时间值直至电机开始失速,从而优化您应用中的这些设置。 ⑶移动包络 一个包络是一个预先定义的移动描述,它包括一个或多个速度,影响着从起点到终点的移动。一个包络由多段组成,每段包含一个达到目标速度的加速/减速过程和以目标速度匀速运行的一串固定数量的脉冲。位控向导提供移动包络定义界面,在这里,您可以为您的应用程序定义每一个移动包络。PTO 支持最大100 个包络。 定义一个包络,包括如下几点:①选择操作模式;②为包络的各步定义指标。③为包络定义一个符号名。 ⑴选择包络的操作模式:PTO 支持相对位置和单一速度的续转动,如图3所示,相对位置模式指的是运动的终点位置是从起点侧开始计算的脉冲数量。单速续转动则不需要提供终点位置,PTO 一直持续输出脉冲,直至有其他命令发出,例如到达原点要求停发脉冲。
质量通病精细化控制要点 路基工程 一、填方路基滑坡、塌陷 表观现象 在半填半挖路段或跨越深沟、峡谷的高填方路段,土质材料填筑的路基容易出现滑坡、塌陷现象。 原因分析 a.路基基底存在软土层,且厚度不均匀。 b.填土速度过快,施工沉降观测、侧向位移观测不到位。 c.路基填筑层压实宽度不够或边坡二次贴补。 d.填筑材料含水量高或采用了透水性较差的材料填筑且处理不当。 e.路基顶面长期积水。 f.边坡较大路段未分层填筑。 控制要点 施工措施: 1.填筑前认真查阅地质报告,对地面以下埋深较浅的软土层要处理到位。 2.加强高填方填筑的沉降观测,发现问题及时处理。 3.高填路基应分层填筑,至少每填筑三层要测量一次中线偏位和填筑宽度。保证填筑宽度。 4.合理选择路基填料,严格控制填筑材料的含水量。 5.路基填筑顶面满足排水要求,加强雨水和地下水的排除,提高路基水稳定性。 6.严格控制填筑厚度,纵坡较大路段应开挖台阶分层填筑。 管理措施:
1.在填筑前做好承载力试验,并报监理工程师认可。 2.严格执行分项工程开工审批制度,路基填筑前应确定填筑材料、填筑厚度和碾压设备,逐级上报,经总监办批准。 3.制定高填路基填筑作业指导书。 4.压实度每层必检,三层必报,监理验收。 5.明确填筑路段施工负责人、监理责任人,路基填筑完工之前不得随意换人。 二、桥涵构造物端部路基沉陷 表观现象 小桥涵、通道台背回填碾压不密实,造成沉降不均匀,桥头跳车,桥面混凝土与桥头路面出现陡坡或错台。 原因分析 a.软土路基不均匀沉降,路基与构造物沉降量不一致。 b.桥头填筑材料选择不当,填料水稳定性差。 c.未分层填筑,压实度未有效控制。 d.桥头被雨水冲刷、淘空。 e.结构物附近压实机械无法靠近,局部压实度不足。控制要点 施工措施: 1.认真选择填筑材料,做好填筑材料的各项试验,严格控制填料粒径,禁止土石混填。 2.填筑厚度力求最佳,压实设备满足要求,保证压实效果 3.要求每层必检,监理抽检,并做好检测记录。 4.桥头台背回填尽可能与路基填筑同步进行,压路机碾压不到的位置,采取水泥或石灰稳定,机械夯实。 5.做好桥头回填的防水和排水工作,防止雨水浸泡和冲刷。
车用电控技术有限公司 红林车用电控技术有限公司 贵州红林 HSV系列开关式高速电磁阀 HSV系列开关式高速电磁阀系列产品是我公司与美国BKM公司联合研制、生产的快速响应开关式数字阀,是一种用于机电液一体化中电子与液压机构间理想的接口元件。该系列产品结构紧凑、体积小、重量轻、响应快速、动作准确、重复性好、抗污染能力强、内泄漏小、可靠性高。最显著的特点是该产品能够直接接受数字信号对流体系统的压力或流量进行PWM控制,该特点为数字控制进入液压气动领域提供了有效手段。1992年该产品被评为国家级重点新产品并获得贵州省科学技术进步二等奖。 HSV高速电磁阀系列产品具有两通常开、两通常闭、三通常开、三通常闭四个系列近200个品种;材料有碳钢、不锈钢两种类别;工作方式可采用连续加载、脉冲宽幅调制、频率调制或脉宽——频率混合调制。 HSV高速电磁阀系列产品的上述特点使该电磁阀具有广泛的应用范围,如汽车变速器、燃油喷射、天然气喷射、压力调节、流量控制、宇航控制系统、先导阀、医疗器械、机床、机器人等领域。
性能数据 结构:螺纹插装式,两通常开、两通常闭、三通常开、 三通常闭 额定压力:2、5、7、20、14、20 MPa 流量:2~9L/min(额定压力下) 内泄漏:0 电压:12V 、24V DC 工作方式:连续通电、脉冲宽幅调制、频率调制或脉宽——频率混合调制 脉宽范围(占空比):20%~80% 最大功率:10~50W 平均功率:3~15W 动态响应时间: 脉宽调制:常闭型:开放≤3.5ms,关闭≤2.5ms 常开型:开放≤2.5ms,关闭≤3.5ms 连续通电:常闭型:开放≤6.0ms,关闭≤4ms 常开型:开放≤4.5ms,关闭≤6.0ms 重复精度:±0.05ms 温度范围:-40℃~+135℃ 寿命:设计寿命不小于1×109次 耐久性试验已超过2×109次
脉冲输出功能 本章节是对有关FP∑输出功能作了介绍 6.4.1 脉冲输出功能的概述 用到的指令和控制器 ●利用FP∑的脉冲输出功能,可以控制脉冲串输入形式的电机驱动器,来实现定位控制。 ●专用指令F171(SPDH)能够根据设置的初始速度、最大速度、加/减速时间以及目标值,自动 输出所要求的脉冲,实现梯形升降速的定位控制。 ●专用指令F171(SPDH)还能实现自动回原点功能。 ●专用指令F172(PLSH),可以实现点动(JOG)的脉冲输出。目标值也可以被设置,以便脉冲 输出能在目标值匹配时停下来。 ●专用指令F174(PL0H),能实现脉冲输出和数据表一致,以便定位控制依照数据表来工作。●专用指令F175(SPSH),能实现线性插补控制。通过指定合成速度,加/减速时间以及目标值, 这条指令使用线性插补控制实现脉冲输出。 ●专用指令F176(SPCH),能实现圆弧插补控制。用户可以从两种形成圆弧的方法中选择其一。 一种是指定经过的位置,另一种是指定一个圆心位置。通过指定不同的参数,脉冲使用圆弧插补实现输出。 注意: 直线插补控制指令F175(SPSH)和圆弧插补控制指令F176(SPCH)只能和C32T2控制单元配合使用。 设置系统寄存器 当使用脉冲输出功能时,应将相应通道的系统寄存器和设置为“不使用高速计数器”。
6.4.2 几种脉冲输出方式 正/反向脉冲 输出方式 在这种方法中,控制器使用双向脉冲工作,一个为正向旋转脉冲, 另一个为反向旋转脉冲 图84:FP ∑脉冲输出功能—CW/CCW 输出方式 脉冲+方向 输出方式(正向:关/反向:开) 在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转 方向。在这种模式下,当旋转方向信号为“关”的时候正向脉冲工作。 图85:FP ∑脉冲输出—脉冲+方向输出方式1 脉冲+方向 在这种方法中,控制器使用一个脉冲输出指定速度,用开/关信号指定旋转方向。在这种模式下,当旋转方向信号为“开”的时候正向脉冲工作。 图86:FP ∑脉冲输出—脉冲+方向输出方式2
高速公路施工质量控制要点及注意事项 第一章路基工程 一、路基挖方 1、路基挖方前必须先做好截水沟和临时排水设施。路基开挖后,如发现有地下渗水,应加深边沟并及时设置盲沟,将地下水引出路基范围。 2、挖方路基有不同土石分层时,承包人应尽可能按土石分类进行开挖,并应将挖出的适用材料与非适用材料严格分开。 3、深挖地段的土质路基、工程地质不良路段应尽可能避开雨季施工。 4、雨季开挖路堑时,宜分开开挖,每层底面应设大于1%的纵坡,挖方过沟宜沿边坡预留30CM厚,等雨后再修整到设计坡线,开挖路堑宜于距路床顶30cm时暂停止开挖,并在两侧挖排水沟,待雨季后再挖到设计标高。 5、注意爆破安全,应以小型及松动爆破为主,严禁大爆破。 6、路堑边坡不允许留有松动危石,并应及时整修好上边坡。路堑开挖时,应尽量避免超挖,超挖部分应在防护工程施工时用浆砌片石填实。 7、承包人在路堑挖方施工过程中发现软弱夹层及断裂层应及时报告监理及设计代表,以便及时变更,加强防护,防止滑坡。
二、路基填方 (一)、填料要求 1、宕渣材料的最大粒径不得天于压实层厚度的2/3,且最大粒径不得超过15cm,路槽底面以下0—80cm范围内不得用粒径大于10cm的材料填筑,路槽底面以下80—150cm范围内不得用粒径大于15cm的材料填筑。 2、填料粒径要求严格控制,解小工作必须在料场用轧石机进行,不允许在摊铺现场采用大面积人工敲碎方法解小,现场超过50cm的石块必须清除出场。现场监理应严格控制粒径的大小及解小的方法。 3、宕渣填料应均匀,避免出现粗粒或细粒过于集中的现象,当石块含量较大时,石块间空隙应以石屑或监理工程师批准的其它材料铺嵌填密实,且层厚应相应减小。 (二)、施工准备 1、填筑路基前,承包人必须先挖好临时排水沟一般不得小于50cm×50cm,并保持畅通。路基填筑前一般应先疏干积水、降低地下水位,再进行清表、碾压、原地面压实度达到要求后方进行路基填筑(特殊情况允许先填筑第一层宕渣压实后再开挖检测原地面压实度)。 2、试验路段:路基施工前,承包单位应在监理工程师批准的路段自费修筑不小于1000m2(长度不小于50m)的试验路段,以确认不同材料在不同的压实机械下的松铺厚度、碾压遍数、碾
目录 目录 1绪论 (1) 1.1课题研究背景与意义 (1) 1.2国内外研究现状 (1) 1.3相关定义与引理 (2) 1.4本文主要研究内容 (3) 2肿瘤化疗的脉冲控制系统模型 (5) 2.1引言 (5) 2.2模型介绍 (5) 2.3主要结果 (7) 2.3.1周期解的稳定性 (7) 2.3.2有界性 (11) 2.3.3持久性 (12) 2.3.4数值仿真 (16) 2.4本章小结 (17) 3具有状态反馈的肿瘤化疗模型 (19) 3.1模型介绍 (19) 3.2主要结果 (19) 3.2.1正向不变集 (19) 3.2.2持久性 (20) 3.2.3肿瘤细胞得以消灭,而免疫细胞持久存在的条件 (22) 3.2.4数值仿真 (24) 3.3本章小节 (28) 4直接延迟反馈陈系统中混沌的脉冲控制与同步及其在通信中的应用 (29) 4.1引言 (29) 4.2直接延迟混沌系统的脉冲控制 (29) 4.2.1直接延迟脉冲控制的基本理论 (29) 4.2.2直接延迟混沌系统脉冲控制稳定性理论 (30) 4.2.3脉冲控制仿真研究 (32) 4.2.4脉冲控制电路仿真 (33) 4.3直接延迟反馈混沌陈系统的脉冲同步 (37) 4.3.1直接延迟脉冲同步稳定性理论 (37) 4.3.2脉冲同步仿真研究 (39) V
西安理工大学硕士学位论文 VI 4.3.3脉冲同步电路仿真 (40) 4.4基于直接延迟混沌系统的脉冲同步保密通信方法 (42) 4.4.1基于混沌脉冲同步的保密通信方法 (42) 4.4.2系统仿真 (44) 4.4本章小结 (46) 5总结与展望 (47) 5.1论文总结 (47) 5.2未来展望 (47) 致谢 (49) 参考文献 (51) 攻读硕士期间相关研究成果 (55)
高速开关阀控制的可变夹紧力夹具 袁光明1,2 孙厚芳1 陈光明3 摘要 针对恒定夹紧力夹具对零件加工精度的影响,提出一种变夹紧力夹具方案。该夹具根据切削力的大小,优化分析工件最佳的夹紧点位置及各点的夹紧力,能够自动调整夹紧力的大小,以适应切削力,减少加工系统的切削变形。采用同工步数字控制技术,实现自适应夹紧功能,采用高速开关阀作为液压系统的动态控制元件控制夹紧力的大小。 关键词:自适应夹具 高速开关阀 变夹紧力 中图分类号:T H16 文献标识码:A 文章编号:1671—3133(2005)06—0070—03 A a lterable cl am p i n g force f i xture con troll able by h i gh speed on2off va lve Y uan Guangm i n g,Sun Houfang,Chen Guangm i n g Abstract Presents a concep tual fra me work of alterable clamp ing f orce fixture considering the effects of an invariable cla mp ing f orce t o the defor mati on accuracy of workp ieces in multi p le2stati on nu merical contr olled manufacturing.A alterable cla mp ing force fixture can aut omatically adjust its cla mp ing force t o adap t t o the cutting f orce t o reduce the cutting def or mati on of machining sys2 te m.Self adap ting cla mp ing was achieved by nu merical contr olled technol ogy according t o different p r ocess step.I n order t o obtain the cla mp ing f orce,high s peed on2off valves are adap ted t o contr ol the hydraulic p ressure syste m.The p r ogress and policy of con2 tr ol of the fixture system are briefly intr oduced. Key words:Self adapti n g f i xture H i gh speed on2off va lve A lterable cl am p i n g force 在夹具的常规设计中,对静态的定位误差和夹紧误差进行较多研究。然而,对加工过程中因切削力等因素变化而引起的动态误差及其消除方法研究较少。 随着数控技术的普及,经数控加工的零件数量越来越多。在加工中心上加工零件,其加工特点是一次安装完成多个粗、精工序切削加工。为了保证零件在不同切削力状态下稳定加工,夹具的夹紧力必须按照最大切削用量确定,这往往造成低刚度、精密零件的夹紧变形。 本文研制的变夹紧力夹具,可以在加工过程中根据切削力的大小相应调整夹紧力的大小,夹紧力与切削力相适应,使夹紧力产生的工件变形达到最小,并采用数字控制技术,实现自适应夹紧的功能。 1 变夹紧力夹具 如图1所示为采用高速开关阀控制的夹具变夹紧力控制部分框图,其主要组成有机械装置、液压系统、电气控制系统及控制软件等。按功能划分,主要由夹紧力优化系统、夹紧力自适应控制系统和夹紧力执行系统等组成。 工件加工前,首先进行计算机三维建模,利用有限元软件对工件三维实体模型进行刚度分析,确定工件刚度的薄弱环节,优化分析其最佳的夹紧点位置及各点的夹紧力。刚度分析计算的力参数来自工件的NC 加工程序。切削参数提取模块从NC程序中提取加工用量,由式(1)计算切削力的数值 : 图1 夹具系统组成 F z= a p h m C s sinγ0 (1) ………………………………… 式中,a p 为切削深度;h m 为切屑厚度;γ 为刀具前角; C s为单位横截面上的切削力(N/mm2),由试验求得。 夹紧力自适应控制系统接收夹紧力优化系统输入的夹紧力数据,由夹紧力控制计算机进行数据处理,并输出控制用脉宽调制(Pulse W idth Modulati on,P WM)信号。压力检测反馈系统检测油缸的实际压力,由计算机对P WM信号进行修正。 夹紧力执行系统完成对工件的夹紧功能。设计时,采用了液压系统的控制方案,根据控制系统提供的夹紧力大小信息,配用高速开关阀完成压力的实施与控制。 如图2所示为夹具的液压系统原理图。本夹具系 工艺与工艺装备
---------------------------------------------------------------最新资料推荐------------------------------------------------------ PLC高速脉冲输出PTO 高速脉冲输出指令(PTO) 1/ 34
PTO是什么?高速脉冲串输出PTO(Pulse Train Output)内置于西门子s7-200可编程控制器或s7-1200可编程控制器中,是其三种开环控制方式之一,用于速度和位置控制。 注:西门子s7-200的三种开环控制方式为: 1.脉宽调制(PWM):用于速度,位置或占空比控制。 2.脉冲串输出(PTO):用于速度和位置控制。 3.EM253位控模块:用于速度和位置控制的附加模块。
---------------------------------------------------------------最新资料推荐------------------------------------------------------ PTO的功能是什么?高速脉冲串输出PTO的功能为:输出指定数目,占空比为50%的方波脉冲串。 3/ 34
PTO的特点特点:高速脉冲串输出(PTO)方式下:只能改变脉冲的周期值和脉冲数。 1.周期值输出脉冲的周期以?s或ms为增量单位,变化范围分别是10~65 535?s或 2~65 535ms。 2.脉冲数输出脉冲的个数在1-4 294 967 295范围内可调。 3.注意事项周期设置时,设置值应为偶数,若设为奇数会引起输出波形占空比的轻微失真。 周期设置值应大于2,若设置值小于2,系统将默认为2。
4 Y7 Y5 COM4FX2NPLC 高速脉冲输出的应用例程 本文适用机型: 具有同时输出4路高速脉冲的能力,支持的发脉冲指令有PLSY 、PLSR 、DRVI 三种。最高输出频率为20K (100K 订货可选),允许同时输出互不影响。相同编号的Y 输出点在梯形图中也允许多重驱动,方便用户编程。以下就以DRVI 指令为例,介绍驱动4个步进马达驱动器的方法。 允许高速脉冲输出的点分别是Y0、Y1、Y6、Y7,与步进马达驱动器的接线如下: 脉冲输入端 方向输入端 步进马达驱动器电源负极端 步进马达驱动器1 Y0 Y2 COM0、COM2 步进马达驱动器2 Y1 Y3 COM1、COM2 步进马达驱动器3 Y6 Y4 COM3、COM2 步进马达驱动器、COM2 测试过程: 1, 写入梯形图到PLC 中,文件名为2N-DRVI 。使PLC 进入RUN 状态。 2, 使X0 ON ;Y0输出500个脉冲,Y2 ON 正转。使X1 ON ;Y0输出500个脉冲, Y2 OFF 反转。 3, 使X2 ON ;Y1输出500个脉冲,Y3 ON 正转。使X3 ON ;Y1输出500个脉冲, Y3 OFF 反转。 4, 使X4 ON ;Y6输出500个脉冲,Y4 ON 正转。使X5 ON ;Y6输出500个脉冲, Y4 OFF 反转。 5, 使X6 ON ;Y7输出500个脉冲,Y5 ON 正转。使X7 ON ;Y7输出500个脉冲, Y5 OFF 反转。 PLSY 、PLSR 脉冲指令使用到的特殊元件如下: Y0 Y1 Y6 Y7 发送结束标志 M8029 M8029 M8029 M8029 累计脉冲个数(32位) D8140、D8141 D8142、D8143 D8150、D8151 D8152、D8153 DRVI 脉冲指令使用到的特殊元件如下: Y0 Y1 Y6 Y7 发送结束标志 M8029 M8029 M8029 M8029 当前位置值(32位) D8140、D8141D8142、D8143 D8150、D8151 D8152、D8153 执行时的加减速 时间(ms ) D8148 D8148 D8148 D8148 脉冲输出停止位 M8145 M8146 M8155 M8156 脉冲输出忙标志 M8147 M8148 M8157 M8158 注意事项: 1, Y6用于脉冲输出时,不能同时使用X0作为高速计数的输入。 2, Y7用于脉冲输出时,不能同时使用X3作为高速计数的输入。
S31线大饭铺至龙口段(蒙晋界)高速公路工程建设项目 质量控制要点 (试行) S31线大饭铺至龙口段(蒙晋界)高速公路工程建设项目 2016年12月
第一部分总则 一:总体质量目标:竣工验收工程质量评定优良 二:质量评定:质量评分≥95分,路面平整度σ≤0.7mm(单点极值σ≤1.2 mm) 三:保证措施:健全的质量管理体系;有效的质量运行机制;科学的施工组织;严格的检查验收制度。 四:编制依据:现行的各类施工规范;评定标准;设计文件;本项目的特点。 第二部分路基工程 一:主要质量指标 1:路基填料液限不大于50%,塑性指数不大于26, 2:CBR值: 上路床(0-0.3m)≥8; 下路床(0.3-1.2m)≥5; 上路堤(1.2-1.9m)≥4: 下路堤(>1.9m)≥3; 零填及挖方路基(0-0.3m)≥8;(0.3-1.2m)≥5 3:压实度 上路床(0-0.3m)≥96%; 下路床(0.3-1.2m)≥96%; 上路堤(1.2-1.9m)≥94%,(填土高度大于8m时≥95%); 下路堤(>1.9m)≥93%;(填土高度大于8m时≥94%);
零填及挖方路基(0-0.3m)≥96%;(0.3-1.2m)≥96%; 填方路基清表压实度≥90%,高路堤h≥20m的清表压实度≥92% 4:检查频率:填方路基2点/1000m2 5:路基弯沉:179.1/100mm; 6:填土路基填料最大粒径:mm 上路床(0-0.3m)≤100; 下路床(0.3-1.2m)≤100 上路堤(1.2-1.9m)≤100: 下路堤(>1.9m)≤150; 零填及挖方路基(0-1.2m)≥100; 7:填石路基填料最大粒径:mm 填料最大粒径不大于500mm,并小于层厚的2/3,不均匀系数15-20,路床底面以下400mm范围内,小于150mm. 8:桥涵台背回填压实度≥96%。 二:路基施工一般要求 (一)测量 1 :公路路基施工前,对导线点、水准点进行复测。相邻标段必须搭接。 2:大桥、高填深挖等特殊部位应加密导线点、水准点。丢失的补齐。3:根据不同的施工部位,对水准点进行布设,但必须与原设计联网闭合。
高速开关阀 1 高速开关阀的发展 国外早在50年代末就开始了数字阀的研制工作,但在1975年以前只限于实验室研究。高速电磁开关阀自二十世纪七十年代问世以来,国内外许多厂家、公司,竞相研制出不少的型式结构,对高速开关阀的研究和应用已经成为液压界的一个重要课题。 1.1 国外研究状况 英国最先开展高速开关阀研究,开发出两种特殊结构的高速开关阀,分别采用筒状、锥状的结构设计从而提高了阀体结构刚度,克服了传统电磁开关阀电磁作用力越大衔铁加速度越小的矛盾,使得当阀芯行程小于1mm时,阀的响应时间不大于1ms。 美国公司则于1984年推出了一种三通球形高速电磁开关阀,该阀的响应时间为:开启时间3ms,关闭时间2ms,工作压力10Mpa。 德国一公司成功地开发出一种适用于超高压下工作的高速电磁开关阀,该阀的开启时间为0.3ms,关闭时间为0.65ms。德国另一公司研制响应时间为0.2ms,工作压力为135MPa的超高压高速电磁开关阀。日本一公司研制的高速电磁开关阀,为三位四通滑阀结构,最高工作压力为50MPa,响应时间为1ms,。 此类型高速开关阀的工作流量都甚小,需要的额定电磁力就较小。各有特点,各有不同的实用范围,需要根据系统对电磁阀的性能、安装尺寸的具体要求选择合适的电磁阀结构设计。
1.2 国内研究状况 与国外相比,我国的高速电磁开关阀的开发研究工作起步相对较晚,有关高速电磁开关阀的研究始于二十世纪八十年代后期,所开展的工作大致可以分为两个方面,即一方面是跟踪国外的研究,探索电磁开关阀实现快速响应的基础理论;另一方面则是自主或合作开发高速电磁开关阀样机及与之配套的驱动控制装置。 国内某厂研制成功了HSV系列高速电磁开关阀,该阀为螺纹插装式结构,阀的开启时间为3ms,关闭时间为2ms,最高额定工作压力为20MPa,额定流量为2-9L/min。 2 高速开关阀的分类 2.1 按照阀芯的运动形式分类 按照阀芯的运动形式,可分为:滑阀、球阀、锥阀、平板阀等。 球阀式结构简单密封可靠,工艺性好,行程短,动作灵敏,具有较大的面积梯度和较小的运动摩擦力,因而动态特性也较好,是一种普遍使用的阀芯结构。但是,球阀式结构作用在钢球上的液压力不平衡。参考文献中,对二位三通球阀的液动力进行了仿真研究。受液动力影响,只能做成小通径阀。在流量要求较大的场合,常用它做先导阀构成二级开关阀结构,这就降低了开关阀的动态响应速度。 锥阀式结构通过高低压平衡设计,可以消除液动力的影响,克服球阀式结构液压力不平衡问题,是高速开关阀的一种较理想的阀芯结构
最专业的PLC知识讲解:PLC高速脉冲输出指令 基本指令和顺序控制指令是PLC最常用的指令,为了适应现代工业自动控制需要,PLC制造商开始逐步为PLC增加很多功能指令,功能指令使PLC具有强大的数据运算和特殊处理功能,从而大大扩展了PLC的使用范围。S7-200 PLC 内部有两个高速脉冲发生器,通过设置可让它们产生占空比为50%、周期可调的方波脉冲(即PTO脉冲),或者产生占空比及周期均可调节的脉宽调制脉冲(即PWM脉冲)。占空比是指高电平时间与周期时间的比值。PTO脉冲和PWM脉冲如图1所示。图1 PTO脉冲和PWM脉冲说明在使用脉冲发生器功能时,其产生的脉冲从Q0.0和Q0.1端子输出,当指定一个发生器输出端为Q0.0时,另一个发生器的输出端自动为Q0.1,若不使用脉冲发生器,这两个端子恢复普通端子功能。要使用高速脉冲发生器功能,PLC应选择晶体管输出型,以满足高速输出要求。一、指令说明高速脉冲输出指令说明如下:二、高速脉冲输出的控制字节、参数设置和状态位要让高速脉冲发生器产生合符要求的脉冲,须对其进行有关控制及参数设置,另外,通过读取其工作状态可触发需要的操作。1.控制字节高速脉冲发生器的控制采用一个SM 控制字节(8位),用来设置脉冲输出类型(PTO或PWM)、脉冲时间单位等内容。高速脉冲发生器的控制字节说明见表
5-14,例如当SM67.6=0时,让Q0.0端子输出PTO脉冲;当SM77.3=1时,让Q0.1端子输出时间单位为ms的脉冲。表1 速脉冲发生器的控制字节2.参数设置高速脉冲发生器采用SM存储器来设置脉冲的有关参数。脉冲参数设置存储器说明见表2,例如SM67.3=1,SMW68=25,则将脉冲周期设为25ms。表2 脉冲参数设置存储器3. 状态位高速脉冲发生器的状态采用SM位来显示,通过读取状态位信息可触发需要的操作。高速脉冲发生器的状态位说明见表3,例如SM66.7=1表示Q0.0端子脉冲输出完成。 表3 高速脉冲发生器的状态位三、PTO脉冲的产生与使用PTO脉冲是一种占空比为50%、周期可调节的方波脉冲。PTO脉冲的周期范围为10μs~65535μs或2 ms~65535 ms,为16位无符号数;PTO脉冲数范围为1~4294967295,为32位无符号数。在设置脉冲个数时,若将脉冲个数设为0,系统会默认为个数为1;在设置脉冲周期时,如果周期小于两个时间单位,系统会默认周期值为两个时间单位,如时间单位为ms,周期设为1.3ms,系统会默认周期为2ms,另外,如果将周期值设为奇数值(如75ms),产生的脉冲波形会失真。PTO脉冲可分为单段脉冲串和多段脉冲串,多段脉冲串由多个单段脉冲串组成。1.单段脉冲串的产生要让Q0.0或Q0.1端子输出单段脉冲串,须先对相关的控制字节和参数进行设置,再执行高速脉冲输出PLS指令。图2是一段用
论我国高速公路的质量控制 摘要:高速公路建设的工程质量优劣关系着业主投资效益和运营维护成本的高低。如何做好高速公路的质量管理作用,建造质量优良的高速公路工程,是高速公路管理者急需解决的问题。本文针对影响高速公路的因素,提出做好工程质量控制的措施,并对我国未来高速公路的发展进行探讨。 关键词:高速公路; 质量控制;管理 一、影响我国高速公路质量的因素 高速公路工程项目是一种涉及面广、建设周期长、影响因素多的产品。由于其自身具备的群体性、固定性、单一性、协作性、预约性、复合性和露天性等特点决定了影响高速公路工程项目质量的影响因素较多、复杂。 1.凡参与工程项目建议书、项目可行性研究、工程设计、建设准备、建设施工和竣工验收各环节有关因素都将影响工程质量。 2.由于高速公路工程建设主要以露天为主,受气候、地质等自然因素影响,加上人员和设备的流动性,因而易造成质量的波动。 3.由于设计计算错误、施工方法不当、机械故障、材料质量伪劣、仪器仪表失灵等都会留下质量隐患。 4.高速公路建设中有大量隐蔽工程部位,其后道工序将覆盖前道工序,若不及时进行工序交接间的质量检查,有可能将前道工序的不合格误判为合格。 二、我国高速公路质量控制的措施 对高速公路施工的质量控制需贯穿于整个项目的过程,即要在开工前、建设期和结束后都要对项目做好质量管理。 1.项目开工前的控制措施 在工程项目开工前,监管工程师应对承包商就高速公路工程建设项目质量控制的程序加以明确,以供所有监理人员、承包商的自检人员和施工人员共同遵循,使质量控制工作程序化。监理机构应要求承包商及时提供本工程的施工组织设计,审查承包商的质量管理体系及质量保证体系;审查承包商的人员、机械是否满足工程及合同需要。要求对施工过程中使用的机械、计量器具等报监测部门鉴定。 监理机构应组织监理及施工技术人员对图纸进行认真会审,发现问题及时向设计部门提出,组织由业主、设计、监理、承包商等参加的技术交流会。在各单