光纤陀螺寻北仪的发展现状 1光纤陀螺的研究及应用现状 (1) 2 陀螺寻北仪的发展情况 (1) 1光纤陀螺的研究及应用现状 在惯性导航和惯性制导系统中,陀螺仪是极其重要的敏感元件。所谓惯性导航,就是通过测量运载体的加速度,经过计算机运算,从而确定出运载体的瞬时速度和瞬时位置。所谓惯性制导,则是在得到这些参数的基础上,控制运载体的位置以及速度的大小和方向,从而引导运载体飞向预定的目标。 以陀螺仪和加速度计为敏感元件的惯性导航和惯性制导系统,是一种完全自主式的系统。它不依赖外部任何信息,也不向外发射任何能量,具有隐蔽性、全天候和全球导航能力。因此,惯性导航成为现代飞机、大型舰只和核潜艇的一种重要导航手段,而惯性制导则成为地地战术导弹、战略导弹、巡航导弹和运载火箭的一种重要制导方法。此外,惯性导航还可陆军炮兵测位、地面战车导航以及大地测绘等领域。由此可见,陀螺仪在航空、航天、航海、兵器以致国民经济的某些部门中都有着广泛的应用。 2 陀螺寻北仪的发展情况 第一阶段,20世纪50年代在船舶陀螺罗经的基础上,研制出矿用液浮式陀螺罗盘,这是陀螺寻北仪发展的初级阶段。在这个阶段,德国的克劳斯塔尔矿业学院于1949年研制出液浮式单转子陀螺球,电磁定中心,陀螺电源频率333HZ,电压为100伏三相交流电,陀螺转速19000转/分。一次观测中误差06'' ±,定向时间4小时,仪器重量640千克。其型号为MWI,1955年和1959年相继研制出MW3和MW4a型。精度进一步提高,定向时间进一步缩短,仪器重量进一步减轻。 第二阶段,从20世纪60年代开始,利用金属悬挂带将陀螺灵敏部陀螺马达转子和陀螺房在空气中通过悬挂柱悬挂起来,悬挂带的另一端与支承外壳相固定并采用三根导流管直接向马达供电。这样构成了摆式陀螺罗盘。与第一阶段相比,仪器结构大大简化,全套仪器进一步小型化,重量大大减轻,由于电源频率稳定性大大提高,使陀螺转速稳定,减小了角动量脉动,提高了仪器观测精度。1963
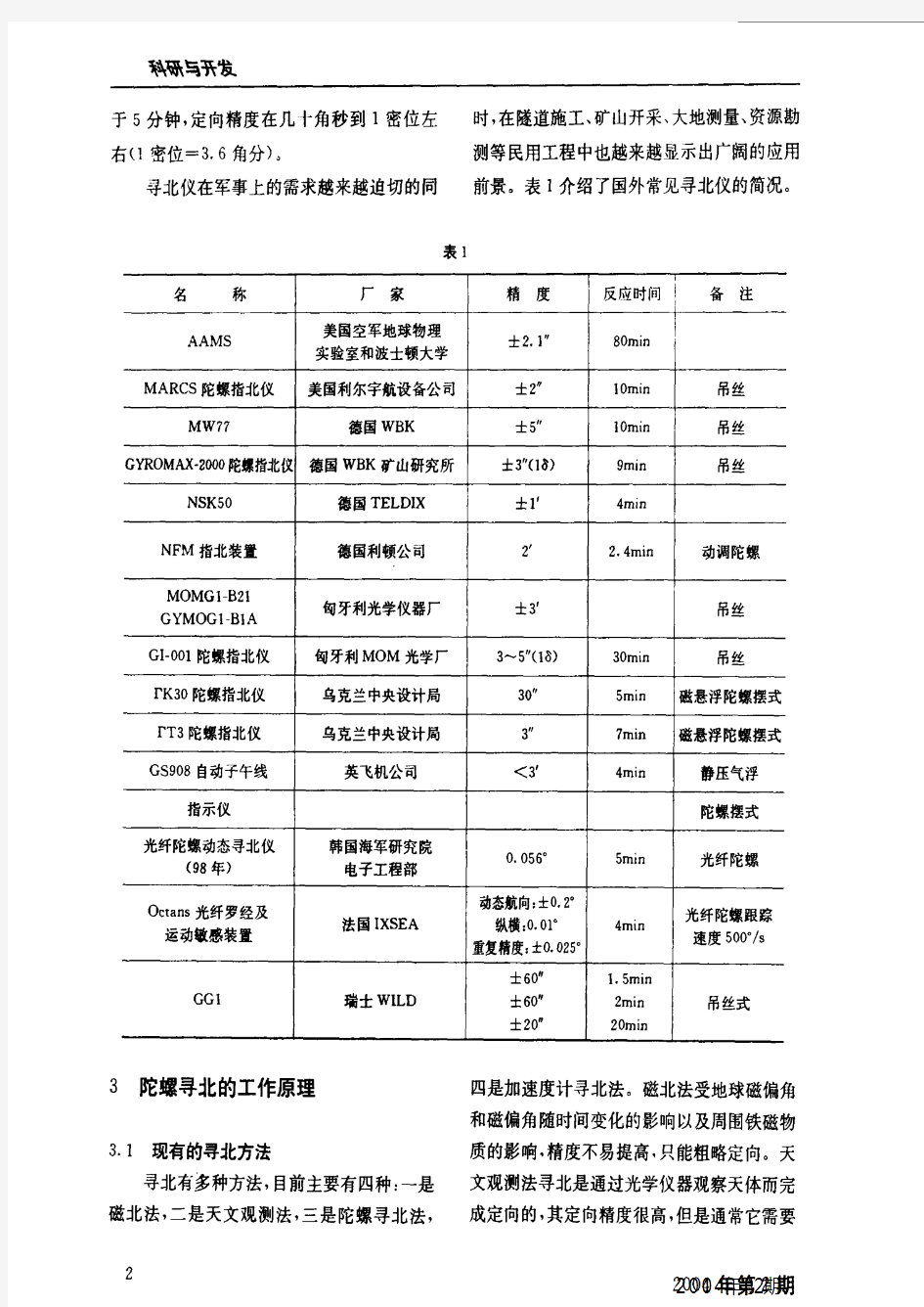
寻北仪原理 简介和分类 寻北仪是罗盘的一种,是用来寻找某一位置的真北方向值。陀螺寻北仪又称陀螺罗盘,是利用陀螺原理测定地球自转角速率在当地水平面投影方向(即真北方位)的一种惯性测量系统。它的寻北过程无需外部参考。除受高纬度限制之外,它的寻北测量不受天气、昼夜时间、地磁场和场地通视条件的影响。陀螺寻北仪是一种精密惯性测量仪器,通常用于为火炮、地对地导弹和地面雷达等机动武器系统提供方位参考。根据所用陀螺类型,陀螺寻北仪可分为以下三种: ◆以二自由度陀螺作为地球自转敏感器的寻北仪(如悬挂摆式陀螺寻北仪) ◆以单轴速率陀螺作为敏感器的寻北仪(如捷联式陀螺寻北仪,高精度,例SDI-151) ◆平台寻北系统 陀螺寻北仪对环境的振动干扰(特别是对低频振动干扰)极为敏感。根据使用环境,陀螺寻北仪可分为地面架设的高精度寻北仪、车载陀螺寻北仪和船用动基座陀螺寻北仪三种。 工作原理 陀螺寻北仪原理 陀螺仪是一种机械转动部件的惯性测量元件,具有耐冲击、灵敏度高、寿命长、功耗低、集成可靠等优点,是新一代捷联式惯性导航系统中理想的惯性器件。 在基于陀螺的寻北应用中,采用的大多数方法是FOG转动固定角度,通过确定偏移量计算相对北方向的夹角。为了精确指北,还必须消除FOG的漂移。一般使用一个旋转平台如图1所示,将陀螺置于动基座上,动基座平面平行于水平面,陀螺的敏感轴平行于动基座平面。开始寻北时,陀螺处于位置1,陀螺敏感轴与载体平行。假设陀螺敏感轴的初始方向与真北方 向的夹角为。陀螺在位置1 的输出值为;然后转动基座90°,在2位置测
得陀螺的输出值为。依次再转动两次90°,分别转到3和4的位置,得到角速度和。 图 1. 陀螺寻北示意图 图 2. 地球自转在陀螺敏感轴上的投影 假设测量点的纬度为,地球自转为,则1位置测得的角速度为: 其中,为陀螺输出的零点漂移。同理可得:
收稿日期:2005211202 基金项目:国家"八六三"基金资助项目 作者简介:王立冬(19662),男,河北正定人,讲师,博士后,从事导航技术研究。 文章编号:100422474(2006)0720042203 光纤陀螺寻北仪多位置寻北误差分析 王立冬1,王夏霄2,张春熹2 (1.军械工程学院光学与电子工程系,河北石家庄050003;2.北京航空航天大学仪器科学与光电工程学院,北京100083) 摘 要:在建立光纤陀螺(FO G )寻北仪误差模型和FO G 误差模型的基础上,从理论上分析了FO G 和加速度计的零偏、FO G 零漂、地速和地磁场随方位的变化等对FO G 、FO G 寻北仪的影响以及FO G 寻北仪产生多位置寻北误差的原因,并提出了减小多位置寻北误差的方法。最后,在FO G 寻北仪中进行了实验,实验证明了理论分析的正确性和所采用的方法的有效性。 关键词:光纤陀螺;光纤陀螺寻北仪;多位置寻北误差中图分类号:U666.1 文献标识码:A The Multi 2position North 2seeking Error Analysis of FOG North 2seeker WANG Li 2dong 1,WANG Xia 2xiao 2,ZHANG Chun 2xi 2 (1.Dept.of Optic &Electronic Engineering ,Ordnance Engineering College ,Shijiazhuang 050003,China ; 2.School of Instrument Science &Optoelectronic Engineering ,Beijing University of Aeronautics and Astronautics ,Beijing 100083,China ) Abstract :The error models of FO G north 2seeker and FO G are founded.The influences of FO G bias ,FO G drift ,accelerometer bias ,the change of the earth velocity and earth magnetic filed with azimuth on the FO G and FO G north 2seeker are analyzed.The reasons that produce multi 2position north 2seeking error and the methods that reduce the multi 2position north 2seeking error are given.The correctness of theoretical analysis and the validity of methods are proved in the FO G north 2seeker. K ey w ords :FO G;FO G north 2seeker ;the multi 2position north 2seeking error 在陀螺寻北仪中,存在着惯性器件误差、安装误差、物理参数误差以及环境温度变化、载体振动等影响。这些误差的来源和作用机理各不相同,对寻北结果的影响也不同,但有一共同点,即他们所产生的寻北误差多是方位角的函数[1],产生多位置寻北误差。其中,惯性器件误差是产生多位置寻北误差的主要原因。挠性陀螺已有成熟的误差模型[2], 而光纤陀螺(FO G )是一种新型角速度传感器,与传统机电陀螺在原理上有本质的不同,其误差产生的机理和误差模型也不同。本文从FO G 寻北仪的误差模型和FO G 的误差模型出发,重点分析和研究了FO G 寻北仪产生多位置寻北误差的原因,并提出了减小该误差的方法。 1 FO G 寻北仪的误差模型 FO G 寻北仪的组成与挠性陀螺寻北仪相似,仅 用两个FO G 代替了挠性陀螺仪。设地理坐标系为东、北、天坐标系X 0Y 0Z 0,坐标系转换过程为 X 0Y 0Z 0 Z 0 ψ X 1Y 1Z 1 X 1 θ X 2Y 2Z 2 Y 2 γ X 3Y 3Z 3 根据误差理论和偏导理论,求得捷联式陀螺寻北仪北向角的偏导为[2] d ψ=W 1y W 2 1x +W 21y d W 1x +W 1x W 21x +W 21y d W 1y (1) 式中 ψ为方位角;W 1x 、W 1y 为FO G 测量值在坐标系X 1Y 1Z 1中的投影,其大小为 W 1x =W 3x ×co s γ+W 3z ×sin γ(2) W 1y =W 3x ×sin θsin γ+W 3y ×cos θ- W 3z ×sin θcos γ (3) 式中 W 3x 、W 3y 为FO G 测量值;W 3z = W 2 i e -W 2 3x -W 2 3y 。θ和γ为姿态角,其大小为θ=arcsin ( A y g )(4)γ=arcsin (- A x g cos θ)(5) 式中 A x 、A y 分别为x 和y 轴加速度计的测量值; g 为地球重力加速度值。 2 寻北仪中FO G 的误差模型 目前,国内还没有一个成熟的FO G 误差模型。 第29卷第1期 压 电 与 声 光 Vol.29No.12007年2月 PIEZO EL ECTECTRICS &ACOUSTOOPTICS Feb.2007
目录 第一篇船用陀螺罗经 第一章陀螺罗经指北原理 (1) 第一节陀螺仪及其特性 (1) 第二节自由陀螺仪在地球上的视运动 (7) 第三节变自由陀螺仪为陀螺罗经的方法 (9) 第四节摆式罗经等幅摆动和减幅摆动 (14) 第五节电磁控制式陀螺罗经 (20) 第六节光纤陀螺罗经 (21) 第二章陀螺罗经误差及其消除 (24) 第一节纬度误差(latitude error) (24) 第二节速度误差(speed error) (25) 第三节冲击误差(ballistic error) (28) 第四节其他误差 (30) 第五章磁罗经 第一节磁的基本概念 (61) 第二节船用磁罗经 (64) 第三节磁罗经的检查、保管与安装 (66) 第四节船正平时的自差理论 (68) 第五节倾斜自差理论 (75) 第六节罗经自差校正 (77) 第七节自差的测定和自差表计算 (83) 第二篇水声导航仪器 第六章回声测深仪 (86) 第一节水声学基础 (86) 第二节回声测深仪原理 (87) 第三节回声测深仪误差 (89) 第四节IES-10型回声测深仪 (91) 第七章船用计程仪 (94) 第一节电磁计程仪 (94) 第二节多普勒计程仪 (96) 第三节声相关计程仪 (99)
第一篇 船用陀螺罗经 第一章 陀螺罗经指北原理 陀螺罗经是船舶上指示方向的航海仪器。其基本原理是把陀螺仪的特性和地球自转运动联系起来,自动地找北和指北。描述陀螺罗经指北原理所涉及的内容用式(1-1)表示: 陀螺罗经=陀螺仪+地球自转+控制设备+阻尼设备 (1-1) 第一节 陀螺仪及其特性 一. 陀螺仪的定义与结构 凡是能绕回转体的对称轴高速 旋转的刚体都可称为陀螺。所谓回 转体是物体相对于对称轴的质量分 布有一定的规律,是对称的。常见的 陀螺是一个高速旋转的转子。回转 体的对称轴叫做陀螺转子主轴,或 称极轴。转子绕这个轴的旋转称为 陀螺转子的自转。陀螺转子主轴相 当于一个指示方向的指针,如果这 个指针能够稳定地指示真北,陀螺 仪就成为了陀螺罗经。 如图1-1所示,一个陀螺用一 个内环(视其水平放置,也可称水平环)支承起来,在自转轴(主轴)水平面内,与主轴相垂直的方向上,用水平轴将内环支承在外环(垂直环)上,而外环则用与水平轴相垂直的垂直轴支承在固定环及基座上。把高速旋转的陀螺安装在这样一个悬挂装置上,使陀螺主轴在空间具有一个或两个转动自由度,就构成了陀螺仪。可以看出高速旋转的转子及其支承系统是构成陀螺仪的两个要素。 实用罗经中,陀螺仪转子的转速都是每分钟几千转到每分钟几万转。陀螺仪的支承系统应具有这样的特点,即它应保证主轴在方位上指任何方向,在高度上指示任何高度,总之,能指空间任何方向。由此,我们可以将陀螺仪概述为:陀螺转子借助于悬挂装置可使其主轴指空间任意方向,这种仪器就叫陀螺仪。 实用陀螺仪,其转子、内环及外环等相对主轴、水平轴以及垂直轴都是对称的,无论几何形体或质量都是对称的。重心与几何中心相重合的陀螺仪称为平衡陀螺仪。不受任何外力矩作用的陀螺仪称为自由陀螺仪。工程上应用的都是自由陀螺仪。陀螺仪的转子能绕1-转子;2-内环;3-外环;4-固定环;5-基座 图1-1
第二节陀螺罗经 概述 1.发展 法国物理学家列昂.福科(Leon Foucault) 1852年提出的陀螺指向理论; 现代船舶上普遍使用的陀螺罗经于本世纪初研制成功的船舶指向仪器。 1908年德国生产出了安许茨型陀螺罗经(ANSCHüTZ gyrocompass); 1911年美国生产出了斯伯利型陀螺罗经(SPERRY gyrocompass); 1916年英国生产出了勃朗型陀螺罗经(BROWN gyrocompass)。 2.分类 近百年,生产出了近百种型号的陀螺罗经,主要分为三大系列或两大类型。 按照结构特点和工作原理分为三大系列:即安许茨系列;斯伯利系列;阿玛-勃朗系列。 按照灵敏部分转子个数分为两大类型:即单转子陀螺罗经和双转子陀螺罗经。 按照控制力矩的性质分为两大类型:机械摆式陀螺罗经和电磁控制式陀螺罗经。 按照阻尼方式分两大类型:水平轴阻尼陀螺罗经和垂直轴阻尼陀螺罗经。 3.与磁罗经相比较,陀螺罗经的主要优缺点 主要优点:指向精度高;多个复示器,有利于船舶自动化;不受磁干扰影响,指向误差小;安装位置不受限制等。 主要缺点:必须有电源才能工作(可靠性较差);工作原理、结构复杂。 4.发展趋势 体积小型化;广泛采用先进技术;提高指向可靠性和使用寿命;简化维护保养。 一、陀螺罗经指北原理 1.自由陀螺仪及其特性 1)自由陀螺仪(free gyroscope)定义 陀螺仪从广义讲就是一种能绕定点高速旋转的对称刚体。 实用陀螺仪是高速旋转的对称刚体及其悬挂装置的总称。 按其悬挂装置不同分为单自由度陀螺仪(single-degree of freedom gyro.)、二自由度陀螺仪(two-degree of freedom gyro.)和三自由度陀螺仪(three-degree of freedom gyro.)。 平衡陀螺仪(balanced gyroscope):若陀螺仪的重心(G)与中心(O)重合。 自由陀螺仪:重心(G)与中心(O)重合,不受任何外力矩作用的三自由度平衡陀螺仪。 2)自由陀螺仪的结构 由转子(gyro wheel)、转子轴(spin axis)(主轴)、内环(horizontal ring)、内环轴(horizontal axis)(水平轴)、外环(vertical ring)、外环轴(vertical axis)(垂直轴)、基座组成的。 转子的转动角速度 的方向称为陀螺仪主轴的正端。 自由陀螺仪结构特点:有三个自由度,即主轴、水平轴和垂直轴; 整个陀螺仪的重心与中心重合。
第一章 陀螺罗经误差及其消除 陀螺罗经的主轴在方位上偏离地理真北方向的角度称为陀螺罗经误差。陀螺罗经误差也是船舶真航向与陀螺罗经航向之间的差值或真北与陀螺罗经北之间的差角。陀螺罗经误差有纬度误差、速度误差、冲击误差、摇摆误差和基线误差。 第一节 纬度误差 (latitude error) 一. 纬度误差产生的原因 在第一章讨论具有阻尼重物的液体连通器单转子式陀螺罗经时指出,在北纬φ处的静止基座上稳定位置为 ?? ???-=-=M H tg M M r D r 2ωθ?α (2-1) 由(2-1)式可见,位于北纬φ处的具有阻尼重物的水银器式罗经,稳定后罗经主轴并不恰好位于子午面内,而是偏离子午面一个角度αr ,当罗经的结构参数M 、M D 确定后, αr 角仅与地理纬度φ有关,故称为纬度误差。 以具有阻尼重物的液体连通器式罗经为例,分析纬度误差产生的原因消除方法。当罗经稳定后,罗经主轴指北端自水平面升高θr 角,产生沿水平轴OY 负向的控制力矩M Y =-Mθr ,使主轴产生绕垂直轴OZ 正向的主进动角速度ωPZ ,主轴指北端向西主进动的线速度u 2= Mθr ,与位于北纬φ处因地球自转角速度垂直分量ω2的影响,使主轴指北端东偏的线速度V 2=Hω2等值反向,亦即u 2=V 2。于是,罗经主轴相对于子午面获得稳定。由于罗经主轴指北端自水平面升高θr 角,阻尼重物则产生与θr 角成正比的阻尼力矩M D θr 沿垂直轴OZ 作用,指OZ 轴的正向。因此,阻尼力矩M Z 将引起罗经主轴绕水平轴OY 的阻尼进动角速度ωPY =M D θr /H ,亦即主轴指北端以阻尼进动线速度u 3= M D θr 向下运动,罗经主轴不能在子午面内r 点稳定。欲使罗经主轴获得相对于水平面的稳定。只有借助于主轴相对于水平面的升降视运动的线速度V 1=Hω2α与阻尼进动线速度u 3的平衡。 为此,主轴指北端只有自子午面向东偏 离适当的方位角αr ,并满足条件: ???==r D r M H u V θαω131 (2-2) 即阻尼力矩M D θr 使主轴指北端向 下进动的线速度u 3与视运动线速度V 1 等值反向。在高度上获得稳定,如(图 2-1)所示。 不难看出,产生纬度误差的原因是 由于了采用垂直轴阻尼法。因此,纬度误 差是采用垂直轴阻尼法罗经特有的误差;它属于垂直轴阻尼法陀螺罗经固有的特性。 二. 纬度误差的消除方法 为了提高陀螺罗经的使用精度,应想方设法对纬度误差进行补偿,最好完全予以消除。实践中,对纬度误差的补偿方法有两种——外补偿法和内补偿法。 水平面