自适应控制文献综述 卢宏伟 (华中科技大学控制科学与工程系信息与技术研究所 M200971940) 摘要:文中对自适应控制系统的发展、系统类型、控制器类型以及国内外自适应控制在工业和非工业领域的应用研究现状进行了较系统的总结。自适应控制成为一个专门的研究课题已超过50年了,至今,自适应控制已在很多领域获得成功应用,证明了其有效性。但也有其局限性和缺点,导致其推广应用至今仍受到限制,结合神经网络、模糊控制是自适应控制今后发展的方向。 关键字:自适应控制鲁棒性自适应控制器 1.自适应控制的发展概况 自适应控制系统首先由Draper和Li 在1951年提出,他们介绍了一种能使性能特性不确定的内燃机达到最优性能的控制系统。而自适应这一专门名词是1954年由Tsien在《工程控制论》一书中提出的,其后,1955年Benner 和Drenick也提出一个控制系统具有“自适应”的概念。 自适应控制发展的重要标志是在1958午Whitaker“及共同事设计了一种自适应飞机飞行控制系统。该系统利用参考模型期望特性和实际飞行特性之间的偏差去修改控制器的参数,使飞行达到最理想的特性,这种系统称为模型参考自适应控制系统(MRAC系统)。此后,此类系统因英国皇家军事科学院的Parks利用李稚普诺夫(Lyapunov)稳定性理论和法国Landau利用Popov 的超稳定性理论等设计方法而得到很大的发展,使之成为—种最基本的自适应控制系统。1974年,为了避免出现输出量的微分信号,美国的Monopli 提出了一种增广误差信号法,因而使输入输出信号设汁的自适应控制系统更加可靠地应用与实际工程中。 1960年Li和Wan Der Velde提出的自适应控制系统,他的控制回路中用一个极限环使参数不确定性得到自动补偿,这样的系统成为自振荡的自适应控制系统。 Petrov等人在1963年介绍了一种自适应控制系统,它的控制数如有一个开关函数或继电器产生,并以与参数值有关的系统轨线不变性原理为基础来设计系统,这种系统称为变结构系统。 1960到1961年Bellman和Fel`dbaum分别在美国和苏联应用动态规划原理设计具有随机不确定性的控制系统时,发现作为辨识信号和实际信号的控制输入之间存在对偶特性,因而提出对偶控制。 Astrom和Wittenmark对发展另一类重要的自适应控制系统,即自校正调节器(STR)作出了重要的贡献。这种调节器用微处理机很容易实现。这一有创见的工作得到各国学者普遍的重视,并且把发展各种新型的STR和探索新的应用工作推向新的高潮,使得以STR方法设计的自适应控制系统在数量上迢迢领先。在这些发展中以英国的Clarker和Gawthrop在1976年提出的广义最小方差自校正控制器最受重视。它克服了自校正调节器不能用于非最小相位系统等缺点。为了既保持自校正调节器实现简单的优点,又有拜较好的
空调自动化控制原理说明 自动化系统是智能建筑的一个重要组成部分。楼宇自动化系统的功能就是对大厦内的各种机电设施,包括中央空调、给排水、变配电、照明、电梯、消防、安全防范等进行全面的计算机监控管理。其中,中央空调的能耗占整个建筑能耗的50%以上,是楼宇自动化系统节能的重点[1]。由于中央空调系统十分庞大,反应速度较慢、滞后现象较为严重,现阶段中央空调监控系统几乎都采用传统的控制技术,对于工况及环境变化的适应性差,控制惯性较大,节能效果不理想。传统控制技术存在的问题主要是难以解决各种不确定性因素对空调系统温湿度影响及控制品质不够理想。而智能控制特别适用于对那些具有复杂性、不完全性、模糊性、不确定性、不存在已知算法和变动性大的系统的控制。“绿色建筑”主要强调的是:环保、节能、资源和材料的有效利用,特别是对空气的温度、湿度、通风以及洁净度的要求,因此,空调系统的应用越来越广泛。空调控制系统涉及面广,而要实现的任务比较复杂,需要有冷、热源的支持。空调机组内有大功率的风机,但它的能耗很大。在满足用户对空气环境要求的前提下,只有采用先进的控制策略对空调系统进行控制,才能达到节约能源和降低运行费用的目的。以下将从控制策略角度对与监控系统相关的问题作简要讨论。 2 空调系统的基本结构及工作原理 空调系统结构组成一般包括以下几部分[2] [3]:
(1) 新风部分 空调系统在运行过程中必须采集部分室外的新鲜空气(即新风),这部分新风必须满足室内工作人员所需要的最小新鲜空气量,因此空调系统的新风取入量决定于空调系统的服务用途和卫生要求。新风的导入口一般设在周围不受污染影响的地方。这些新风的导入口和空调系统的新风管道以及新风的滤尘装置(新风空气过滤器)、新风预热器(又称为空调系统的一次加热器)共同组成了空调系统的新风系统。 (2) 空气的净化部分 空调系统根据其用途不同,对空气的净化处理方式也不同。因此,在空调净化系统中有设置一级初效空气过滤器的简单净化系统,也有设置一级初效空气过滤器和一级中效空气过滤器的一般净化系统,另外还有设置一级初效空气过滤器,一级中效空气过滤器和一级高效空气过滤器的三级过滤装置的高净化系统。 (3) 空气的热、湿处理部分 对空气进行加热、加湿和降温、去湿,将有关的处理过程组合在一起,称为空调系统的热、湿处理部分。在对空气进行热、湿处理过程中,采用表面式空气换热器(在表面式换热器内通过热水或水蒸气的称为表面式空气加热器,简称为空气的汽水加热器)。设置在系统的新风入口,一次回风之前的空气加热器称为空气的一次加热器;设置在降温去湿之后的空气加热器,称为空气的二次加热器;设置
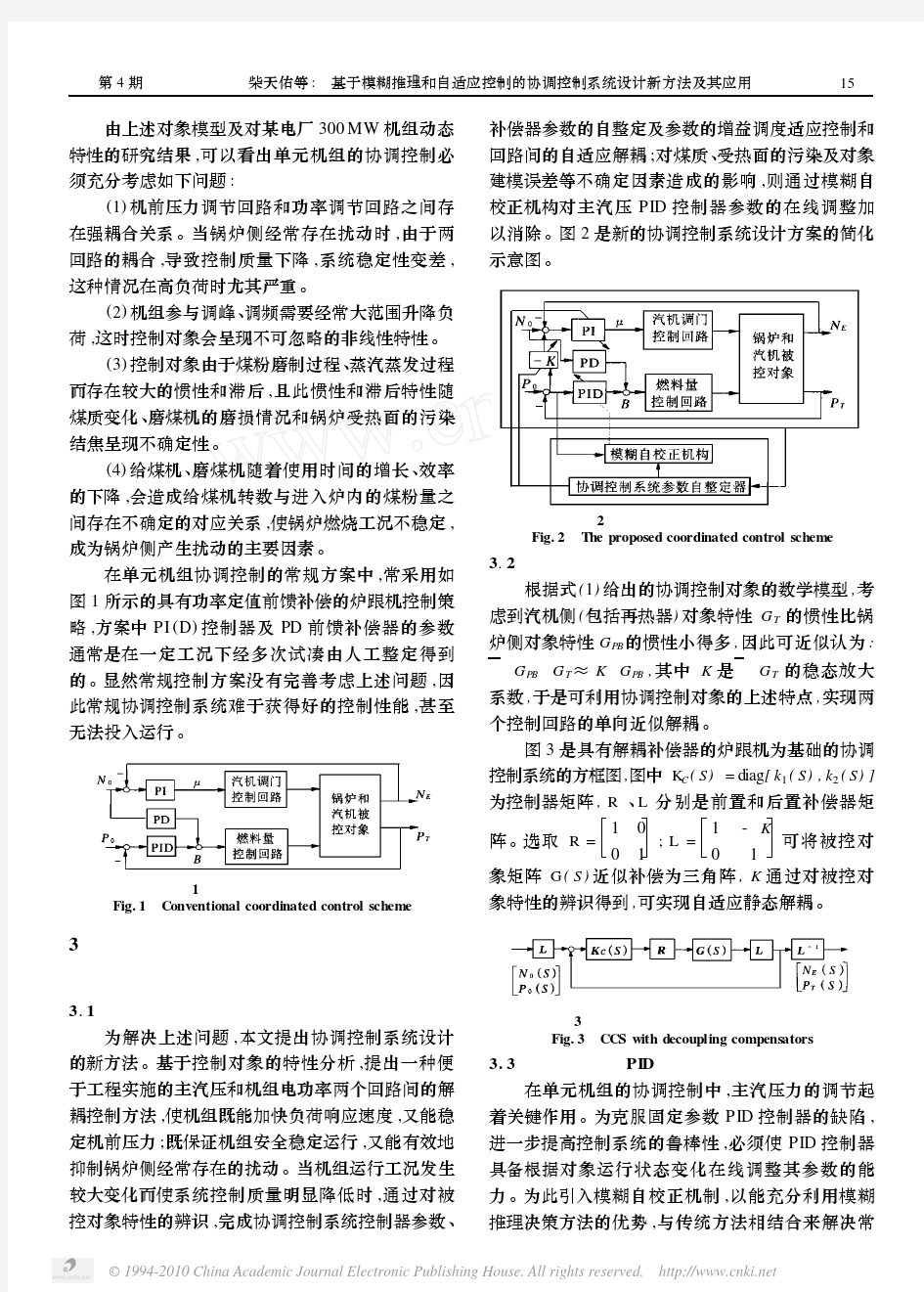
第6章 模糊系统辨识与模糊自适应控制 6.1 模糊系统辨识的建模方法 建立被控对象模型的方法一般有三种: 1. 基于机理的建模; 2. 基于试验的建模; 3. 基于系统辨识的建模。 Zadeh 于1962年曾给出系统辨识的定义:系统辨识是在对输入和输出观测的基础上,在指定的一类系统中,确定一个与被识别的系统等价的系统。 6.2 基于模糊系统模型的模糊系统辨识 1. 模糊关系模型的概念 一个模糊关系模型可以表示为:()F U Y A M ,,, 其中A 表示模糊算法;Y 表示过程的有限离散输出空间;U 表示过程的有限离散 输入空间; F 表示过程的有限离散输入输出空间中所定义的所有基本模糊子集的集合。 所谓模糊模型是描述系统特性的一组模糊条件语句,其形式如: E t y C l)y(t B A k t u ==-=-)( then D or and or )( if 2. 模糊关系模型的品质指标 (1) 规则数:不宜太多,否则太复杂;也不宜太少,否则精度低。 (2) []∑=-=L i t y t y L p 1 22)(?)(1,L 为测量次数,?()y t 为对t 时刻输出的估计值。 3. 建模方法 (1) 确定输入输出空间,选择模糊变量; (2) 确定模型结构 []y(t)l)y(t k t u ,),(--; (3) 建立模糊关系模型,即获得一组模糊条件语句。 6.3 自适应模糊系统预测 自适应模糊预测模型对预报值)(?t y 与实际值)(t y 比较得到误差 )(?)()(t y t y t e -=,根据此误差对预测表进行修正,从而提高预测精度。 举例,见教材301~306页。 *基于T-S 模型的模糊系统辨识
什么是过程控制系统?其基本分类方法有哪几种? 过程控制系统通常是指连续生产过程的自动控制,是自动化技术中最重要的组成部分之一。基本分类方法有:按照设定值的形式不同【定值,随动,程序】;按照系统的结构特点【反馈,前馈,前馈-反馈复合】。 热电偶测量的基本定律是什么?常用的冷端补偿方式有哪些 均质材料定律:由一种均匀介质或半导体介质组成的闭合回路中,不论截面和长度如何以及沿长度方向上的温度分布如何,都不能产生热电动势,因此热电偶必须采用两种不同的导体或半导体组成,其截面和长度大小不影响电动势大小,但须材质均匀; 中间导体定律:在热电偶回路接入中间导体后,只要中间导体两端温度相同,则对热电偶的热电动势没有影响; 中间温度定律:一支热电偶在两接点温度为t 、t0 时的热电势,等于两支同温度特性热电偶在接点温度为t 、ta和ta、t0时的热电势之代数和。只要给出冷端为0℃时的热电势关系,便可求出冷端任意温度时的热电势,即 由于冷端温度受周围环境温度的影响,难以自行保持为某一定值,因此,为减小测量误差,需对热电偶冷端采取补偿措施,使其温度恒定。冷端温度补偿方法有冷端恒温法、冷端补偿器法、冷端温度校正法和补偿导线法。 为什么热电阻常用三线制接法?试画出其接线原理图并加以说明。 电阻测温信号通过电桥转换成电压时,热电阻的接线如用两线接法,接线电阻随温度变化会给电 桥输出带来较大误差,必须用三线接法,以抵消接线电阻随温度变化对电桥的影响。 对于DDZ-Ⅲ型热电偶温度变送器,试回答: 变送器具有哪些主要功能? 变送器的任务就是将各种不同的检测信号转换成标准信号输出。 什么是变送器零点、零点迁移调整和量程调整? 热电偶温度变送器的输入电路主要是在热电偶回路中串接一个电桥电路。电桥的功能是实现热电偶的冷端补偿和测量零点的调整。
中国矿业大学2015 级硕士研究生课程考试 题目自适应控制原理及应用 学生姓名陈明 学号TS15060128A3 所在院系信息与电气工程学院 任课教师郭西进 中国矿业大学研究生院培养管理处印制
目录 1 自适应控制概述 (1) 1.1 自适应控制系统的功能及特点 (1) 1.2自适应控制系统的分类 (1) 1.2.1前馈自适应控制 (1) 1.2.2反馈自适应控制 (1) 1.2.3 模型参考自适应控制(MRAC) (2) 1.2.4自校正控制 (2) 1.3 自适应控制系统的原理 (3) 1.4 自适应控制系统的主要理论问题 (3) 2 模型参考自适应控制 (4) 2.1 模型参考自适应控制的数学描述 (4) 2.2 采用Lyapunov稳定性理论的设计方法 (4) 3 自校正控制 (7) 4 自适应控制在电梯门机系统中的应用 (7) 4.1电梯门机控制系统的关键技术 (7) 4.1.1 加减速过程的S曲线 (8) 4.1.2 系统的自适应控制 (8) 4.3 系统的控制策略 (8) 4.3.1 加减速过程的S曲线 (8) 4.3.2 控制系统模型 (9) 4.4 门机开关的运行曲线 (10) 4.5 系统的实现 (11) 5 结论与展望 (12)
1 自适应控制概述 1.1 自适应控制系统的功能及特点 在日常生活中,所谓自适应是指生物能改变自己的习性以适应新的环境的一种特征。因此,直观地说,自适应控制器应当是这样一种控制器,它能修正自己的特性以适应对象和扰动的动态特性的变化。 自适应控制的特点:研究具有不确定性的对象或难以确知的对象;能消除系统结构扰动引起的系统误差;对数学模型的依赖很小,仅需要较少的验前知识;自适应控制是较为复杂的反馈控制。 1.2自适应控制系统的分类 1.2.1前馈自适应控制 借助于过程扰动信号的测量,通过自适应机构来改变控制器的状态,从而达到改变系统特性的目的。前馈自适应结构图如图1.1所示。 图1.1前馈自适应结构图 由图1.1可知,当扰动不可测时,前馈自适应控制系统的应用就会受到严重的限制。 1.2.2反馈自适应控制 除原有的反馈回路之外,反馈自适应控制系统中新增加的自适应机构形成了另一个
基于51单片机的水温自动控制系统 0 引言 在现代的各种工业生产中 ,很多地方都需要用到温度控制系统。而智能化的控制系统成为一种发展的趋势。本文所阐述的就是一种基于89C51单片机的温度控制系统。本温控系统可应用于温度范围30℃到96℃。 1 设计任务、要求和技术指标 1.1任务 设计并制作一水温自动控制系统,可以在一定范围(30℃到96℃)内自动调节温度,使水温保持在一定的范围(30℃到96℃)内。 1.2要求 (1)利用模拟温度传感器检测温度,要求检测电路尽可能简单。 (2)当液位低于某一值时,停止加热。 (3)用AD转换器把采集到的模拟温度值送入单片机。 (4)无竞争-冒险,无抖动。 1.3技术指标 (1)温度显示误差不超过1℃。 (2)温度显示范围为0℃—99℃。 (3)程序部分用PID算法实现温度自动控制。 (4)检测信号为电压信号。 2 方案分析与论证 2.1主控系统分析与论证 根据设计要求和所学的专业知识,采用AT89C51为本系统的核心控制器件。AT89C51是一种带4K字节闪存可编程可擦除只读存储器的低电压,高性能CMOS 8位微处理器。其引脚图如图1所示。 2.2显示系统分析与论证 显示模块主要用于显示时间,由于显示范围为0~99℃,因此可采用两个共阴的数码管作为显示元件。在显示驱动电路中拟订了两种设计方案: 方案一:采用静态显示的方案 采用三片移位寄存器74LS164作为显示电路,其优点在于占用主控系统的I/O口少,编程简单且静态显示的内容无闪烁,但电路消耗的电流较大。 方案二:采用动态显示的方案 由单片机的I/O口直接带数码管实现动态显示,占用资源少,动态控制节省了驱动芯片的成本,节省了电 ,但编程比较复杂,亮度不如静态的好。 由于对电路的功耗要求不大,因此就在尽量节省I/O口线的前提下选用方案一的静态显示。
先进控制技术大作业
自适应控制技术综述及仿真 1自适应控制系统综述 1.1自适应控制的发展背景 自适应控制器应当是这样一种控制器,它能够修正自己的特性以适应对象和扰动的动特性的变化。这种自适应控制方法应该做到:在系统运行中,依靠不断采集控制过程信息,确定被控对象的当前实际工作状态,优化性能准则,产生自适应控制规律,从而实时地调整控制器结构或参数,使系统始终自动地工作在最优或次最优的运行状态。自从50年代末期由美国麻省理工学院提出第一个自适应控制系统以来,先后出现过许多不同形式的自适应控制系统。模型参考自适应控制和自校正调节器是目前比较成熟的两类自适应控制系统 模型参考自适应控制系统发展的第一阶段(1958年~1966年)是基于局部参数最优化的设计方法。最初是使用性能指标极小化的方法设计MRAC,这个方法是由Whitaker等人于1958年在麻省理工学院首先提出来的,命名为MIT规则。接着Dressber,Price,Pearson等人也提出了不同的设计方法。这个方法的主要确点是不能确保所设计的自适应控制系统的全局渐进稳定;第二阶段(1966~1974年)是基于稳定性理论的设计方法。Butchart和Shachcloth、Parks、Phillipson等人首先提出用李亚普诺夫稳定性理论设计MRAC系统的方法。在选择最佳的李亚普诺夫函数时,Laudau采用了波波夫超稳定理论设计MRAC系统;第三阶段(1974-1980年)是理想情况(即满足假定条件)下MRAC系统趋于完善的过程。美国马萨诸塞大学的Monopoli提出一种增广误差信号法,当按雅可比稳定性理论设计自适应律时,利用这种方法就可以避免出现输出量的微分信号,而仅由系统的输入输出便可调整控制器参数;针对一个控制系统控制子系统S进行研究,通常现代控制理论把大型随机控制系统非线性微分方程组式简化成一个拥有已知的和具有规律变化性
沈阳利源轨道交通设备有限公司暖通空调自控系统项目 HVAC暖通空调自控系统 技术方案设计书
一. 总体设计方案 根据用户对项目要求,并结合沈阳建筑智能化建筑现状,沈阳利源轨道交通装备有限公司暖通空调自控系统项目是屹今为止整个沈阳所有建筑物厂区当中智能化程度要求较高的。沈阳利源轨道交通装备有限公司暖通空调自控系统项目里面分布着大量的暖通空调机电设备。 ?如何将这些暖通空调机电设备有机的结合起来,达到集中监测和控制,提高设备的无故障时间,给投资者带来明显的经济效益; ?如何能够使这些暖通空调机电设备经济的运行,既能够节能,又能满足工作要求,并在运行中尽快的将效益体现出来; ?如何提高综合物业管理综合水平,将现代化的的计算机技术应用到管理上提高效率。 这是目前业主关心的也是我们设计所侧重的。 沈阳利源轨道交通装备有限公司暖通空调楼宇自动化控制系统的监测和控制主要包括下列子系统: 冷站系统 空调机组系统 本暖通空调楼宇自动化控制系统之设计是依据沈阳利源轨道交通设备有限公司暖通空调自控系统项目的设计要求配置的,主体的设计思想是结合招标文件及设计图纸为准。 1.1冷站系统 (1)控制设备内容 根据项目标书要求,暖通自控系统将会对以下冷站系统设备进行监控:监控设备监控内容 冷却水塔(2台)启停控制、运行状态、故障报警、手 自动状态。 冷却水泵(2台)启停控制、运行状态、故障报警、手
自动状态、水流开关状态; 冷却水供回水管路供水温度、回水温度, 冷水机组(2台)启停控制、运行状态、故障报警、手 自动状态; 冷冻水泵(2台)启停控制、运行状态、故障报警、手 自动状态、水流开关状态; 冷冻水供回水管路供水温度、回水温度、回水流量; 分集水器分水器压力、集水器压力、压差旁通 阀调节; 膨胀水箱高、低液位检测; 有关系统的详细点位情况可参照所附的系统监控点表。 (2)控制说明 本自控系统针对冷站主要监控功能如下: 监控内容控制方法 冷负荷需求计算根据冷冻水供、回水温度和回水流量测量值,自动计算建筑空 调实际所需冷负荷量。 机组台数控制根据建筑所需冷负荷自动调整冷水机组运行台数,达到最佳节 能目的。 独立空调区域负荷计算根据Q=C*M*(T1-T2) T1=分回水管温度,T2=分供水总管温度, M=分回水管回水流量 当负荷大于一台机组的15%,则第二台机组运行。 机组联锁控制启动:冷却塔蝶阀开启,冷却水蝶阀开启,开冷却水泵,冷冻 水蝶阀开启,开冷冻水泵,开冷水机组。停止:停冷水机组, 关冷冻泵,关冷冻水蝶阀,关冷却水泵,关冷却水蝶阀,关冷 却塔风机、蝶阀。 冷却水温度控制根据冷却水温度,自动控制冷却塔风机的启停台数,并且自
北方民族大学学士学位论文论文题目:温度自动控制系统的设计 北方民族大学教务处制
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
过程控制系统习题 答案
什么是过程控制系统?其基本分类方法有哪几种? 过程控制系统一般是指连续生产过程的自动控制,是自动化技术中最重要的组成部分之一。基本分类方法有:按照设定值的形式不同【定值,随动,程序】;按照系统的结构特点【反馈,前馈,前馈-反馈复合】。 热电偶测量的基本定律是什么?常见的冷端补偿方式有哪些 均质材料定律:由一种均匀介质或半导体介质组成的闭合回路中,不论截面和长度如何以及沿长度方向上的温度分布如何,都不能产生热电动势,因此热电偶必须采用两种不同的导体或半导体组成,其截面和长度大小不影响电动势大小,但须材质均匀; 中间导体定律:在热电偶回路接入中间导体后,只要中间导体两端温度相同,则对热电偶的热电动势没有影响; 中间温度定律:一支热电偶在两接点温度为t 、t0 时的热电势,等于两支同温度特性热电偶在接点温度为t 、ta和ta、t0时的热电势之代数和。只要给出冷端为0℃时的热电势关系,便可求出冷端任意温度时的热电势,即 由于冷端温度受周围环境温度的影响,难以自行保持为某一定值,因此,为减小测量误差,需对热电偶冷端采取补偿措施,使其温度恒定。冷端温度补偿方法有冷端恒温法、冷端补偿器法、冷端温度校正法和补偿导线法。 为什么热电阻常见三线制接法?试画出其接线原理图并加以说明。
电阻测温信号经过电桥转换成电压时,热电阻的接线如用两线接法,接线电阻随温度变化会给电桥输出带来较大误差,必须用三线接法,以抵消接线电阻随温度变化对电桥的影响。 对于DDZ-Ⅲ型热电偶温度变送器,试回答: 变送器具有哪些主要功能? 变送器的任务就是将各种不同的检测信号转换成标准信号输出。 什么是变送器零点、零点迁移调整和量程调整? 热电偶温度变送器的输入电路主要是在热电偶回路中串接一个电桥电路。电桥的功能是实现热电偶的冷端补偿和测量零点的调整。 大幅度的零点调整叫零点迁移。实用价值是:有些工艺的参数变化范围很小,例如,某设备的温度总在500~1000度之间变化。如果仪表测量范围在0 ~1000度之间,则500℃以下测量区域属于浪费。因为变送器的输出范围是一定的。可经过零点迁移,配合量程调整,使仪表的测量范围在500~1000℃之间,可提高测量精度。
接启动一个拨号服务器。然后,在计算机B 中的pc Anywhere 软件中启动一个通过拨号连接的Clinet (客户端),拨通计算机A ,建立起连 接以后,就可以进行通信了 。 图1被控端计算机的屏幕显示在主控端上 图2主控端搜索被控端计算机A 图3在计算机C 中渐入A 的IP 地址 当需要多台计算机终端进行协同交互时,(比如有三台计算机A ,B ,C )。首先启动A 为Host ,B 为Clinet ,建立A 和B 的连接,在重新启动一个计算机B 上的pc Anywhere 被设为Host ,C 为Clinet 。建立C 与B 的hos t 之间的联系。这样A ,B ,C 三台计算机上同时显示计算机A 屏幕上的内容,三台计算机之间即可进行交互工作。 5总 结 综上所述,远程监控技术随着Internet 的不断发展而得到广泛应用,同时,随着控制、计算机、通信及网络技术的发展,信息交换沟通的领域正在迅速覆盖控制应用的现场设备、控制及管理的各个层次。信息技术的飞速发展,引发了自动化结构的深刻变革,逐步形成了以网络集成自动化系统为基础的信息系统。目前在过程自动化、制造自动化、楼宇、家庭及交通等领域得到了广泛的应用。 值得提出的是近年来,随着远程控制技术发展的日趋成熟,黑客技术也在不断发展,对网络安全造成了极大的威胁,黑客的主要攻击手段之一,就是使用远程控制技术,渗透到对方的主机系统里。从而实现远程操作目标主机。其破坏力之大,决不容忽视的。因此,我们必须加强安全意识,合理安全的应用远程控制技术。 参 考 文 献 [1]何牧泓.轻松玩转远程控制.重庆出版社,2002. [2]崔彦锋,许小荣.VB 网络与远程控制编程实例教程.北京希望出版社, 2002.[3]王 达.计算机网络远程控制.清华大学出版社,2003.作者简介:樊丽萍,女,硕士研究生,研究方向:计算机控制及应用,通信地址:大连铁道学院303#(116028)E -mail :xiao fanshi wo @https://www.doczj.com/doc/e42774180.html, ;袁爱进,男,研究生导师,研究方向:现场总线技术。作者注:辽宁省教育厅重大项目“工业现场智能化设备的嵌入式软件构件平台研究” 文章编号:1671-1041(2004)05-0029-02 太阳能热水器自动温度控制器设计 王 彤 (丹东电子研究设计院有限责任公司,辽宁丹东118000) 摘要:介绍了太阳能热水器的自动控制器的功能和组成,阐述了控制系统的 工作原理,硬件和软件设计及相关技术问题,实际应用表明该系统可靠性高、操作简单,具有良好的经济和社会效益。关键词:自动控制;单片机中图分类号:T P273 文献标识码:A The design of automatic temperature controller of solar heater W ANG Tong (Dandong Electronic research &Design institute Co .,Ltd .Dandong 118000China ) Ab stract :Fu nctio n an d co mpo sitio n o f au to matic temp era tu re co ntr olle r of so la r h e ate r a re in trod uce d in th is p a pe r .Also d escribe s t he wo rk p rinciple o f th e co nt rol syste m ,t he ha rd wa re d esign ,t he sof twa re d esig n a nd corre lative t ech niq ue pro b -le m .Th e pra ctical a p plica tion h a s sh ow n th at th is system is o f go od re lia blity a nd e as y op e ratio n ,a n d sig nifican t eco no mic an d so cia l be n efit .Ke y Wo rds :a u toma tic con tro l ;sin gle -chip micr ocomp u ter 收稿日期:2004-04-23 电子邮件来稿 目前,市场上销售的太阳能热水器大多没有自动控制功能,使用 起来不灵活方便,为此,为太阳能热水器加装自动控制功能,具有广泛的市场。 1自动控制系统技术要求 (1)设定温度的范围为25℃至65℃。 (2)输入信号为水温传感器产生的温度信号;水位传感器产生的水量信号。 (3)输出信号为控制水温电信号(控制加热电热管)和控制水流量调节阀信号(控制加水电磁阀)。 (4)配有输入功能键盘:完成自动/手动、手动加水键、手动加热键、温度设定键、水位档选择键。 (5)具有两位LED 数码显示电路,显示温度设定值、实际温度测量值,六个发光二极管指示六档水位(10%、30%、50%、70%、90%、100%)。 2系统硬件设计及原理 太阳能热水器加装自动控制功能,主要是加装一个数据采集系 统和一个电脑控制板。根据太阳能热水器的技术要求及经济方面的考虑,我们选用89C51单片机为核心控制器[1],组成热水器温度控制系统。系统由89C51单片机、数据采集系统、水位选择电路、温度显 29 仪器仪表用户 科研设计与成果 欢迎订阅欢迎撰稿欢迎发布广告产品信息
自适应控制习题 (徐湘元,自适应控制理论与应用,电子工业出版社,2007) 【2-1】 设某物理量Y 与X1、X2、X3的关系如下:Y=θ1X 1+θ2X 2+θ3X 3 由试验获得的数据如下表。试用最小二乘法确定模型参数θ1、θ2和θ3 X1: 0.62 0.4 0.42 0.82 0.66 0.72 0.38 0.52 0.45 0.69 0.55 0.36 X2: 12.0 14.2 14.6 12.1 10.8 8.20 13.0 10.5 8.80 17.0 14.2 12.8 X3: 5.20 6.10 0.32 8.30 5.10 7.90 4.20 8.00 3.90 5.50 3.80 6.20 Y: 51.6 49.9 48.5 50.6 49.7 48.8 42.6 45.9 37.8 64.8 53.4 45.3 【2-3】 考虑如下模型 )()(3.03.115.0)(212 1t w t u z z z z t y ++?+=???? 其中w(t)为零均值、方差为1的白噪声。根据模型生成的输入/输出数据u(k)和y(k),分别采用批处理最小二乘法、具有遗忘因子的最小二乘法(λ=0.95)和递推最小二乘法估计模型参数(限定数据长度N 为某一数值,如N=150或其它数值),并将结果加以比较。 【2-4】 对于如下模型 )()1.065.01()()5.0()()15.08.01(213221k w z z k u z z k y z z ??????+?++=+? 其中w(k)为零均值、方差为1的白噪声。根据模型生成的输入/输出数据u(k)和y(k),分别采用增广最小二乘法和随机逼近法进行模型参数估计,并比较结果。 (提示:w(t)可以用MATLAB 中的函数“randn ”产生)。 【3-1】 设有不稳定系统: )()9.01()()1(111k u z z k y z ???+=? 期望传递函数的分母多项式为)5.01()(11???=z z Am ,期望输出m y 跟踪参考输入r y ,且无稳态误差。试按照极点配置方法设计控制系统,并写出控制表达式。 【3-2】 设有被控过程: )()2.11()()6.07.11(1221k u z z k y z z ????+=+? 给定期望传递函数的分母多项式为)08.06.01()(211???+?=z z z A m ,试按照极点配置方法设计控制系统,使期望输出无稳态误差,并写出控制表达式u(k)。
2008年9月第15卷第5期 控制工程 ControlEngineeringofChina Sep.2008 V01.15.No.5 文章编号:1671.7848(2008)05.0572.04 利用模糊系统的自适应模糊控制器 金宗华’,张龙茁2,李远昌2,姜根泽2 (1.华东理工大学信息学院,上海200237;2+釜庆大学电子系,釜山608—7”) 摘要:针对非缌}生系统控制,设计了利用TSK(Takagi.Sllgerpl(ang)模糊系统的自适应模糊控 制器。所设计的自适应控制方法是参考模型自适应控制方法,而且利用Ly删,v函数保证了闭环系 统的稳定性,同时推导了最优的自适应控制规律。首先.根据控制对象的输入输出数据建立rISK模 糊模型,然后,由TSK模糊模型设计初期的TSK模糊控制器,并根据自适应规律随时调整模糊控制 器参数。倒立摆系统的仿真实验验证了所设计的自适应模糊控制器的有效性。 关键词:自适应控制器;TSK模糊系统;非线性系统 中图分类号:TP273文献标识码:A AdaptiveFuzzyControllerbyUsingFuzzySystems fiNZong-hual,JANGYong-jool2,LEEWon-chan92,KANGC,eun-taek2 (1.InformationScienceandEIlgineeringInstitute,EastChinaUniversityofScienceandTechnology,Shanghai200237,China; 2.Detm/tmmt0fElectronic,PukyongNationalUniversity,Pusan608—737,Korea) Abstract:AdaptivemzzycontrollerfornonlinearsystemsisdesignedbyusingTSK(晰-Sugeno-K,a119)fuzzymodel.Theadaptivecontrolismodelrefeienceadaptivecontr01.By璐ingLyapunovfunction,thestabilityofclosed-loopsystemisassuredandthebestadaptivelawiscaleu- lated.TheTSK fuzzymodelisconstructedbasedOiltheinput-outputdataobtainedfromatargetplant.Then,theTSKfhzzycontrollerisdeter—minedbasedontheTSKfurymodel.Parametersofthefhzzycontroller咖beadjustedaccordingtotheadaptiverule.Theadaptivefuzzycon—trollerisappljedtocontrolallinvertedpendulumsystem,andtheresultsshowtheeffectivenessoftheproposedmethod. Keywords:adaptivecontroller;TSKfuzzysystem;nonlinearsystem 1引言2自适应模糊控制器设计 一般模糊控制方法适用于系统的数学模型比较复杂或很难求得的情况。另外,确定了模糊规则,它的参数一般不变,所以适用于系统没有参数变化或参数变化较小的情况。如果系统存在不确定参数或控制过程中系统存在大的参数变化时很难得到好的控制结果。为了弥补这些缺点,本文提出了自适应模糊控制方法。目前,Proeyk和Mamdani提出的自适应方法是没有具体的模糊模型,直接利用系统的输入输出数据直接产生模糊控制器参数。利用神经网络或遗传算法,通过学习的方法产生控制规律和固定模糊控制规律,调整隶属度函数等自适应控制方法u叫J。这些自适应控制方法利用的模糊规则一般是常数或模糊集合,大部分依靠专家的经验获得的控制规律直接利用于模糊控制规律,利用模糊规则相对少。模糊模型和模糊控制器都是线性方程形式的TSK模糊规则的自适应控制还没有进行研究。因此,本文提出了利用TSK模糊系统的自适应模糊控制方法b。¨。 本文提出的自适应模糊控制器是参考模型自适应模糊控制器。首先,求出控制对象的模糊模型,根据模糊模型求出初期模糊控制器;然后,为了系统的输出跟踪参考模型的输出随时调整模糊控制器参数。 设计的参考模型自适应模糊控制系统结构,如图1所示。 参考模型 厂型q丽面群皇望隔≤盖y爪(t))一“0 图1参考模型自适应模糊控制系统结构图 №.1Thestructureofnmdelreferenceadaptive fuzzycontrolsystem I)TSK模糊控制器假设控制对象是r/,维非线性系统: 收稿日期:2007-05.23;收修定稿日期:2007-06—22 作者简介:金宗华(1974一),男,(朝鲜族),吉林延吉人,讲师,博士,主要从事模糊控制、智能控制、自适应控制及最优控制等方面 的教学与科研工作。 万方数据
清华大学 毕业设计(论文) 题目基于PLC的大棚温度自动控制 系统设计 系(院)自动化系 专业电气工程与自动化班级2009级3班 学生姓名雷大锋 学号2009022321 指导教师王晓峰 职称副教授 二〇一三年六月二十日
独创声明 本人郑重声明:所呈交的毕业设计(论文),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议。据我所知,除文中已经注明引用的内容外,本设计(论文)不含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。 本声明的法律后果由本人承担。 作者签名: 年月日 毕业设计(论文)使用授权声明 本人完全了解滨州学院关于收集、保存、使用毕业设计(论文)的规定。 本人愿意按照学校要求提交学位论文的印刷本和电子版,同意学校保存学位论文的印刷本和电子版,或采用影印、数字化或其它复制手段保存设计(论文);同意学校在不以营利为目的的前提下,建立目录检索与阅览服务系统,公布设计(论文)的部分或全部内容,允许他人依法合理使用。 (保密论文在解密后遵守此规定) 作者签名: 年月日
基于PLC的大棚温度自动控制系统设计 摘要 大棚温度自动控制系统是一种为作物提供最好环境、避免各种棚内外环境变化对其影响的控制系统。该系统采用FX2N系列PLC作为下位机,PC机作为上位机,采用三菱D-720通用变频器,采用温度、湿度、光照传感器采集现场信号,这些模拟量经PLC转化为数字信号,把转化来的数据与设定值比较,PLC经处理后给出相应的控制信号使环流风机、遮阴帘、微雾加湿机等设备动作,大棚温度就能实现自动控制。这种技术不但实现了生产自动化,而且非常适合规模化生产,劳动生产率也得到了相应的提高,通过种植者对设定值的改变,可以实现对大棚内温度的自动调节。 关键词:大棚,温度控制,PLC
自适应控制习题 (徐湘元,自适应控制理论与应用,电子工业出版社, 2007) 【2-1】 设某物理量丫与XI 、X2、X3的关系如下:丫=0 1X1 + 0 2X2+0 3X3 由试验获得的数据如下表。试用最小二乘法确定模型参数 0 1、0 2和0 3 X1:0.620.4 0.420.820.660.720.380.520.450.690.550.36 X2:12.014.214.612.110.88.2013.010.58.8017.014.212.8 X3:5.206.100.328.305.107.904.208.003.905.503.806.20 Y: 51.649.948.550.649.748.842.645.937.864.853.445.3 【2-3】 考虑如下模型 其中w(t)为零均值、方差为1的白噪声。根据模型生成的输入/输出数据u(k)和y(k), 分别采用批处理最小二乘法、具有遗忘因子的最小二乘法(入 =0.95)和递推最小二乘法 估计模型参数(限定数据长度 N 为某一数值,如N=150或其它数值),并将结果加以比 较。 【2-4】 对于如下模型 (1 _0.8z 1 0.15z 2 )y(k) 一(z 2 0.5z 3 )u(k) - (1 - 0.65z 1 - 0.1z 2 )w(k) 其中w(k)为零均值、方差为1的白噪声。根据模型生成的输入/输出数据u(k)和y(k), 分别采用增广最小二乘法和随机逼近法进行模型参数估计,并比较结果。 (提示:w(t)可以用MATLAB^的函数“ randn ”产生)。 【3-1】 设有不稳定系统: (1z 1)y(k) - z ^(10.9z 1)u(k) 期望传递函数的分母多项式为 Amz z m r 且无稳态误差。试按照极点配置方法设计控制系统,并写出控制表达式。 【3-2} 设有被控过程:一 - _ (1 1.7z 1 0.6z 2)y(k)z 2(11.2z 1 )u(k) 一 ~ - 一 - -1.3z 0.5z u(t)w(t) I 0.3z 2 1 - - T ()(10.5 ),期望输出y 跟踪参考输入y , y(t)
《电子技术综合设计》 设计报告 设计题目:水温自动控制系统 组长姓名:学号: 专业与班级:工业自动化14-16班 姓名:学号: 专业与班级:工业自动化14-16班 姓名:学号: 专业与班级:工业自动化14-16班 时间: 2016 ~ 2017 学年第(1)学期指导教师:陈烨成绩:评阅日期:
一、课题任务 设计并制作一个水温自动控制系统,对1.5L净水进行加。水温保持在一定范围内且由人工设定。 细节要求如下: 1.温度设定范围为40℃~90℃,最小分辨率为0.1℃,误差≤1℃。 2.可通过LCD显示屏显示温度目标值与实时温度。 3.可以通过键盘调整目标温度的数值。 二、方案比较 1.系统模块设计 为完成任务目标,可以将系统分为如下几个部分:5V直流电供电模块、测温模块、80C52单片机控制系统、键盘控制电路、温度显示模块、继电器控制模块、强电加热电路。通过各模块之间的相互配合,可以完成水温检测、液晶显示、目标值设置、水温控制等功能。 系统方框图如下:
2.5V直流电供电模块 方案一:直接用GP品牌的9v电池,然后接通过三端稳压芯片7805稳压成5伏直流电源提供给单片机系统使用,接两个5伏电源的滤波电容后输出。 方案二:通过变压器,将220v的市电转换成9v左右的交流电,变压器输出端的9V电压经桥式整流并电容滤波。要得到一个比较稳定的5v电压,在这里接一个三端稳压器的元件7805。 由于需要给继电器提供稳定的5V电压,而方案一中导致电池的过度损耗,无法稳定带动继电器持续工作,所以我们选用能够提供更加稳定5v电源的方案二。 3.测温模块 经查阅资料,IC式感温器在市场上应用比较广泛的有以下几种: AD590:电流输出型的测温组件,温度每升高1 摄氏度,电流增加1μA,温度测量范围在-55℃~150℃之间。其所采集到的数据需经A/D 转换,才能得到实际的温度值。 DS18B20:内含AD转换器,所以除了测量温度外,它还可以把温度值以数字的方式(9 B i t ) 送出,因此线路连接十分简单,它无需其他外加电路,直接输出数字量,可直接与单片机通信,读取测温数据。它能够达到0.5℃的固有分辨率,使用读取温度暂存寄存器的方法还能达到0.0625℃以上精度,温度测量范围在-55℃~125℃之间,应用方便。 SMARTEC感温组件:这是一只3个管脚感温IC,温度测量范围在 -45℃~13℃,误差可以保持在0.7℃以内。 max6225/6626:最大测温范围也是-55~+125℃,带有串行总线接口,测量温度在可测范围内的的误差在4℃以内,较大,故舍弃该方案。 本设计选用DS18B20感温IC,这是因其性能参数符合设计要求,接口简单,内部集成了A/D 转换,测温更简便,精度较高,反应速度快,且经过市场考察,该芯片易购买,使用方便。 下面是DS18B20感温IC的实物和接口图片
模糊自适应PID控制器 的设计
模糊自适应PID 控制器的设计 一、 模糊自适应原理 模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机控制方法,作为智能控制的一个重要分支,在控制领域获得了广泛应用,模糊控制与传统控制方式相比具有以下突出优点: ·不需要精确的被控对象的数学模型; ·使用自然语言方法,控制方法易于掌握; ·鲁棒性好,能够较大范围的适应参数变化; ·与常规PID 控制相比,动态响应品质优良。 常规模糊控制器的原理如图1所示: 图1 模糊控制系统框图 PID 控制规律: 1 01()[()()()] p D I d u t k e t e t dt T e t T dt =++? 式中:p k ---比例系数; I T ---积分时间常数; D T ---微分时间常数。 在工业生产中过程中,许多被控对象随着负荷变化或干扰因素影响,其对象特性参数或结构发生改变。自适应控制运用现代控制理论在线辨识对象特征参 数,实时改变其控制策略,使控制系统品质指标保持在最佳范围内,但其控制效果的好坏取决于辨识模型的精确度,这对于复杂系统是非常困难的。因此,在工业生产中过程中,大量采用的仍然是PID 算法,PID 参数的整定方法很多,但大多数都以对象特性为基础。 随着计算机技术的以展,人们利用人工智能的方法将操作人员的调整经验作为知识存入计算机中,根据现场实际情况,计算机能自动调整PID 参数,这样就出现了智能PID.这种控制器把古典的PID 控制与先进的专家系统相结合,实现系统的最佳控制。这种控制必须精确地确定模型,首先将操作人员长期实践积累