物理实验报告实验时间2020年 4 月 5 日第7 周水环学院班级学号2019101***
姓名****同组者(或组号)指导老师**** 得分
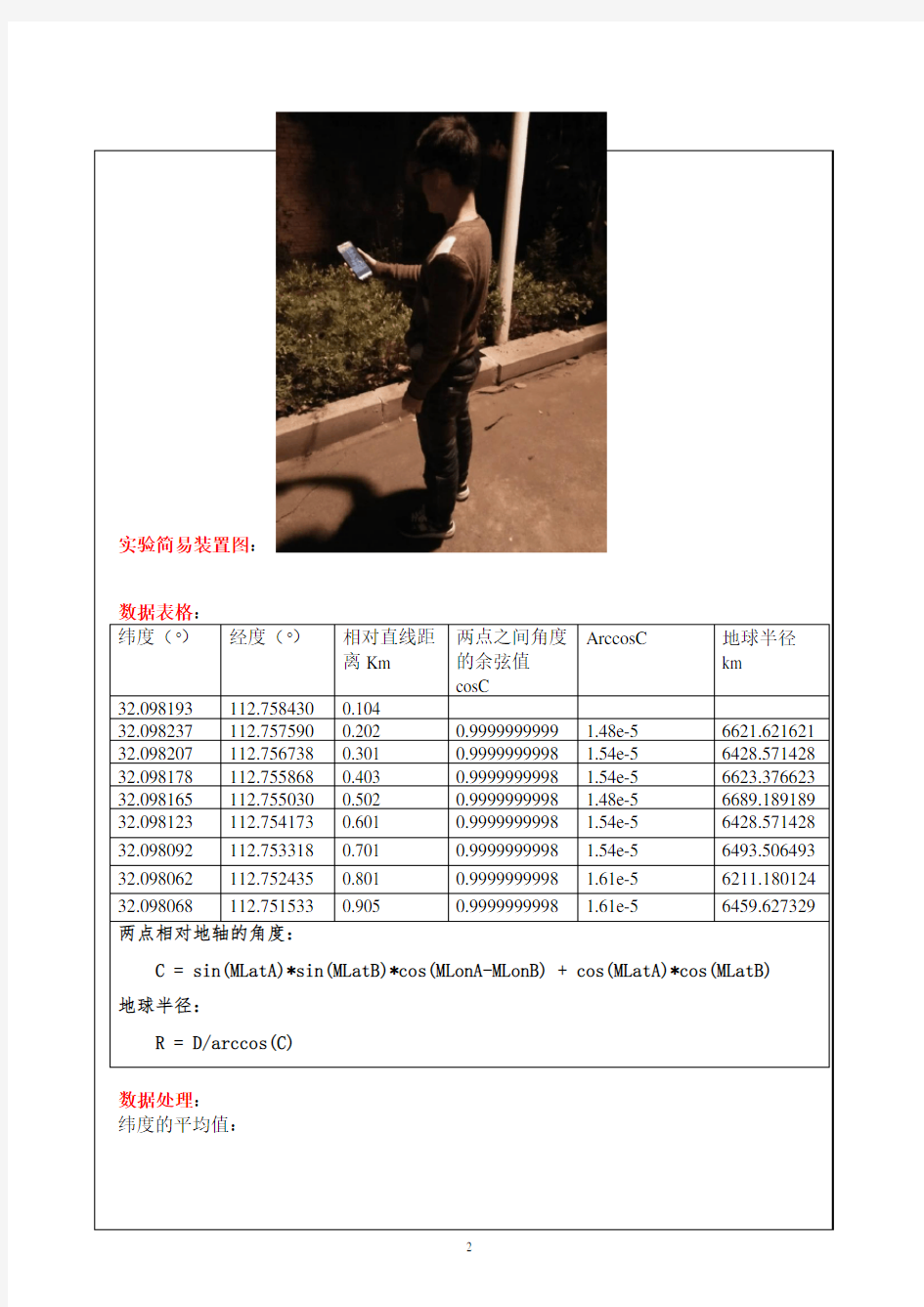
实验简易装置图:数据表格:
纬度(°)经度(°)相对直线距
离Km 两点之间角度
的余弦值
cosC
ArccosC 地球半径
km
32.098193 112.758430 0.104
32.098237 112.757590 0.202 0.9999999999 1.48e-5 6621.621621 32.098207 112.756738 0.301 0.9999999998 1.54e-5 6428.571428 32.098178 112.755868 0.403 0.9999999998 1.54e-5 6623.376623 32.098165 112.755030 0.502 0.9999999998 1.48e-5 6689.189189 32.098123 112.754173 0.601 0.9999999998 1.54e-5 6428.571428 32.098092 112.753318 0.701 0.9999999998 1.54e-5 6493.506493 32.098062 112.752435 0.801 0.9999999998 1.61e-5 6211.180124 32.098068 112.751533 0.905 0.9999999998 1.61e-5 6459.627329 两点相对地轴的角度:
C = sin(MLatA)*sin(MLatB)*cos(MLonA-MLonB) + cos(MLatA)*cos(MLatB)
地球半径:
R = D/arccos(C)
数据处理:
纬度的平均值:
?ɑ=32.
098193+32.098237+32.098207+32.098178+32.098165+32.098123+32.098092+32.09806 2+32.098068)/9=32.098147
经度的平均值为:
??=
(112.758430+112.757590+112.756738+112.755868+112.75503+112.754173+112.7533 18+112.752435+112.751533)/9=112.755012
则地球半径对平均值为:
?R=(6621.621621+6428.57428+6623.376623+6689.189189+6628.571428+6493.506493+ 6211.180124+6459.627329)/8=6494.455529
误差原因分析:
系统误差:GPS精度不够,周围的磁场(非地磁场)对定位产生干扰
偶然误差:数据看错,数据输入错误,小数点后读几位对结果的影响等
结果表达:
R=6494.455529Km
自动控制理论实验报告 实验一 典型环节的时域响应 院系: 班级: 学号: 姓名:
实验一 典型环节的时域响应 一、 实验目的 1.掌握典型环节模拟电路的构成方法,传递函数及输出时域函数的表达式。 2.熟悉各种典型环节的阶跃响应曲线。 3.了解各项参数变化对典型环节动态特性的影响。 二、 实验设备 PC 机一台,TD-ACC+教学实验系统一套。 三、 实验步骤 1、按图1-2比例环节的模拟电路图将线接好。检查无误后开启设备电源。 注:图中运算放大器的正相输入端已经对地接了100k 电阻。不需再接。 2、将信号源单元的“ST ”端插针与“S ”端插针用“短路块”接好。将信号形式开关设为“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值为1V ,周期为10s 左右。 3、将方波信号加至比例环节的输入端R(t), 用示波器的“CH1”和“CH2”表笔分别监测模拟电路的输入R(t)端和输出C(t)端。记录实验波形及结果。 4、用同样的方法分别得出积分环节、比例积分环节、惯性环节对阶跃信号的实际响应曲线。 5、再将各环节实验数据改为如下: 比例环节:;,k R k R 20020010== 积分环节:;,u C k R 22000== 比例环节:;,,u C k R k R 220010010=== 惯性环节:。,u C k R R 220010=== 用同样的步骤方法重复一遍。 四、 实验原理、内容、记录曲线及分析 下面列出了各典型环节的结构框图、传递函数、阶跃响应、模拟电路、记录曲线及理论分析。 1.比例环节 (1) 结构框图: 图1-1 比例环节的结构框图 (2) 传递函数: K S R S C =) () ( K R(S) C(S)
重力勘探实验报告 学号: 班号: 061123 :梦谨 指导教师:永涛
目录 前言 (2) 实验目的 (3) 实验原理 (3) 磁力仪工作原理 (4) 工作容及步骤 (3) 实验容及步骤 (6) 实验数据分析与解释 (7) 评述与结论 (13) 总结 (8) 建议 (9)
一.实验目的: 1.学习磁法勘探的基本原理,会用磁力仪进行简单的勘探; 2.根据勘探的结果,能够反演出地下物体的基本形态和特征。 二.实验原理 磁法勘探是利用地壳各种岩(矿)石间的磁性差异所引起的磁场变化(磁异常)来寻找有用矿产资源合查明隐伏地质构造的一种物探方法。 自然界的岩石和矿石具有 不同磁性,可以产生各不相同 的磁场,它使地球磁场在局部 地区发生变化,出现地磁异 常。利用仪器发现和研究这些 磁异常,进而寻找磁性矿体和 研究地质构造的方法称为磁 法勘探。磁法勘探是常用的地球物理勘探方法之 图1 磁异常示意图 一,它包括地面、航空、海洋磁法勘探及井中磁测等。磁法勘探主要用来寻找和勘探有关矿产(如铁矿、铅锌矿、铜锦矿等)、进行地质填图、研究与油气有关的地质构造及构造等问题。
三.磁力仪的工作原理 磁力仪按其测量的地磁场参数及其量值,可分为:相对测量仪器和绝对测量仪器。从使用磁力仪的领域来看,可分为:地面磁力仪,航空磁力仪,海洋磁力仪及井中磁力仪。下面重点介绍电子式磁力仪中的质子磁力仪。 (1)性能指标 图3-6 GSM-19T型质子磁力仪 主要技术指标如下: 灵敏度:0.05nT 分辨率:0.01nT
绝对精度:±0.2nT 动态围:20000到120000nT 梯度容差:>7000nT/m 采样率: 3秒至60 秒可选 温飘:0.0025nT/°C(环境温度为0到-40°C); 0.0018nT/°C(环境温度为0到+55°C) 工作温度:-40℃—+55℃ 存储4M字节:对流动站可存209715个读数 对基点站可存699050个读数 对梯度测量可存174762个读数 对步行磁测可存299593个读数 尺寸及重量:主机223×69×240mm,重2.1Kg 传感器170mm(长)×75mm(直径),重2.2Kg (2)测量原理 应用质子自旋磁矩在地磁场的作用下围绕地磁场方向做旋进运动的现象进行磁场测量。在水、酒精、甘油等样品中,质子受强磁场激发而具有一定方向性,去掉外磁场,质子在地磁场作用下绕地磁场T旋进,其旋进频率f与地磁场T强度成正比,关系式为: T=23.4872f 单位:伽马或纳特。测定出频率f即可计算出总磁场强度T的数
《地球物理测井》课程实验报告 院系:地球科学与工程学院 班级:地质1401 姓名:周天宇 学号: 0130 指导老师:赵军龙 2016年11月9日
1、课程实验的目的 《地球物理测井》课程安排8个学时的上机实验,使学生了解测井数据基本格式、测井曲线基本类型、学会用有关专业软件绘制测井综合曲线图;就实际资料开展岩性、物性及含油气性定性分析,从而为测井资料定量处理奠定基础。 2、课程实验主要内容 常规测井曲线类型 常规测井曲线类型包括:岩性测井系列(包括自然电位、自然伽马、井径测井),孔隙度测井系列(包括声波时差测井、密度测井、中子测井)和电阻率测井系列(包括深中浅探测的普通视电阻率测井、侧向测井以及感应测井等)。 测井资料定性分析方法 1.对于岩性分析,可以根据“表格1”来进行 表格 1 主要岩石的岩性分析测井特征 2.对于砂岩段的物性分析 ⑴声波时差测井值越大,密度测井值越小,中子测井值越大,则物性越好即砂岩的空隙度越发育;(2)如果AC、CNL、DEN变化幅度比较大,则该砂岩段物性不均匀;(3)如果下层物性比上层物性好,则该砂岩段为正韵律地层;(4)如果GR值与AC值增大,则此处为泥质夹层;如果AC值减小且AT值增大,则此处为物性夹层;如果GR值减小,AC值增大,AT 值增大,则此处含钙质夹层;(5)泥岩的声波时差约为280μs/m,泥质砂岩的声波时差约为177μs/m,渗透砂岩的声波时差为400-220μs/m。 3.含油气性分析 在已找到物性较好的砂岩段进行分析,并结合深中浅感应测井和电阻率测井曲线的变化:一般来说,含油砂岩段的电阻率值会明显增大。 测井综合曲线图模板的生成及测井数据的加载
1. When a bell is struck with a hammer, it vibrates freely at a number of natural frequencies. The combination of natural oscillations that are excited gives each bell its particular sonority. In an analogous way, the sudden release of energy in a very large earthquake can set the entire Earth into vibration, with natural frequencies of oscillation that are determined by the elastic properties and structure of the Earth’s interior. The free oscillations involve three-dimensional defo rmation of the Earth’s spherical shape and can be quite complex. Before discussing the Earth’s free oscillations it is worth reviewing some concepts of vibrating systems that can be learned from the one-dimensional excitation of a vibrating string that is fixed at both ends. Any complicated vibration of the string can be represented by the superposition of a number of simpler vibrations, called the normal modes of vibration. These arise when travelling waves reflected from the boundaries at the ends of the string interfere with each other to give a standing wave. Each normal mode corresponds to a standing wave with frequency and wavelength determined by the condition that the length of the string must always equal an integral number of half-wavelengths (Fig. 3.16).As well as the fixed ends, there are other points on the string that have zero displacement; these are called the nodes of the vibration. The first normal (or fundamental)mode of vibration has no nodes. The second normal mode (sometimes called the first overtone) has one node; its wavelength and period are half those of the fundamental mode. The third normal mode (second overtone) has three times the frequency of the first mode, and so on.Modes with one or more node are called higher-order modes. 当用一把锤子敲击一个钟时,钟会以一系列的固有频率自由的颤动。被激 发的固有震动的联合给每个一钟独特的音响。与此相似,在一个大地震中能量 的突然释放可以使整个地球颤动,这种颤动的固有频率决定于弹性性质和地球 内部的结构。自由振荡涉及地球球面形状的三维变形,可能相当复杂。在讨论 地球的自由振荡之前,有必要回顾一下振动系统的一些概念,这些概念可以从 两端固定的一维振动的激发中学习。 弦的任何复杂的弦振动都可以用一些简单振动的叠加来表示,称为简正振动。当从两端的边界反射出的行波相互干涉以产生驻波时,就会产生这种现象。 每一个简正模态对应于一个驻波,它的频率和波长取决于长度必须等于半波长的 整数的弦(图3.16)。在弦上还存在一些除固定端外的具有零位移的其他点,这 些被称为振动的节点。第一个简正(或基本)模态振动没有节点。第二个简正 模态(有时称为第一谐波)有一个节点,它的波长和周期是基态的一半。第三 个简正模态(第二谐波)的频率是第一模态的三倍,一个或多个节点的模态称 为高阶模态。 2. Explanation of nouns (20points) surface wave(面波):沿界面及界面一定深度范围内传播的一类地震波,振幅随 深度增加而衰减,能量集中在介质分界面并沿分界面传播,包括瑞利波,勒夫 波和斯通利波。dispersion(频散):面波速度随着周期(或频率)而变化而 变化,成为面波频 散。在记录中面波是很多列波的叠加,随着到时的先后,各相位的周期逐渐改变。 第1页共7页
实验1模拟控制系统在阶跃响应下的特性实验 一、实验目的 根据等效仿真原理,利用线性集成运算放大器及分立元件构成电子模拟器, 以干电池作为输入信号,研究控制系统的阶跃时间响应。 二、实验内容 研究一阶与二阶系统结构参数的改变,对系统阶跃时间响应的影响。 三、实验结果及理论分析 1.一阶系统阶跃响应 a. 电容值1uF,阶跃响应波形: b. 电容值2.2uF,阶跃响应波形:
c. 电容值4.4uF,阶跃响应波形: 2?—阶系统阶跃响应数据表 U r= -2.87V R°=505k? R i=500k? R2=496k 其中
T = R2C U c C:)=「(R/R2)U r 误差原因分析: ①电阻值及电容值测量有误差; ②干电池电压测量有误差; ③在示波器上读数时产生误差; ④元器件引脚或者面包板老化,导致电阻变大; ⑤电池内阻的影响输入电阻大小。 ⑥在C=4.4uF的实验中,受硬件限制,读数误差较大3?二阶系统阶跃响应 a.阻尼比为0.1,阶跃响应波形: b.阻尼比为0.5,阶跃响应波形:
4.二阶系统阶跃响应数据表 E R w ( ?) 峰值时间 U o (t p ) 调整时间 稳态终值 超调(%) 震荡次数 C. d. 阻尼比为0.7,阶跃响应波形: 阻尼比为1.0,阶跃响应波形: CHI 反相 带宽限制 伏/格
四、回答问题 1.为什么要在二阶模拟系统中 设置开关K1和K2 ,而且必须 同时动作? 答:K1的作用是用来产生阶跃信号,撤除输入信后,K2则是构成了C2的 放电回路。当K1 一旦闭合(有阶跃信号输入),为使C2不被短路所以K2必须断开,否则系统传递函数不是理论计算的二阶系统。而K1断开后,此时要让 C2尽快放电防止烧坏电路,所以K2要立即闭合。 2.为什么要在二阶模拟系统中设置 F3运算放大器? 答:反相电压跟随器。保证在不影响输入和输出阻抗的情况下将输出电压传递到输入端,作为负反馈。 实验2模拟控制系统的校正实验 一、实验目的 了解校正在控制系统中的作用
同济大学四平路校区文远楼前防空洞多道瞬态面波探测实验报告 海洋与地球科学学院地球物理系 指导老师:吴健生赵永辉 小组成员:刘佳叶何文俊马驰 2011年6月
目录 1. 目的 2. 原理 3. 仪器介绍 4. 野外实施 5. 数据处理 6. 保证质量措施 7. 问题对策 8. 结论分析 9. 体会展望 10. 参考文献
摘要:利用多道瞬态面波探测方法,测定不同频率的面波速度VR,达到了解同济大学四平路校区黑松林斜坡地下的情况。 关键词:面波探测黑松林斜坡 1.实验目的 通过人工地震资料的采集、处理的方法对同济大学四平路校区黑松林斜坡进行勘察。要求勘探出黑松林斜坡地下的情况。 2. 实验原理 面波分为拉夫波和瑞利波。本实验主要应用的是瑞利波。同一频率的面波的相速度在水平方向上的变化反映出地质条件的横向不均匀性;不同频率的面波的相速度的变化则反映了地下介质在深度方向上的不均匀性。 通过测定不同频率的面波速度VR ,即可达到了解地下地质构造的目的。 3. 仪器介绍 4. 野外实施 4.1 实验区概况 试验区域位于同济大学四平路校区文远楼前,入口朝北,由于无法进入内部,初步估测
该防空洞在平面上呈长方形。实验区上部覆盖种有草皮的土壤层,堪探时土壤较湿润。 4.2 野外布线 此次实验本小组总布线条数为 2条,布线方向为南北向。我们根据实验场地具体情况,在防空洞入口边缘布下了第一条线,在第一条线西侧距离为3米处布下第二条线。在实验过程中,炮点距为1米,检波器间距为1米,检波器每次向北移动距离也为1米。进行人工激发时,我们在每点处各激发两次并采集数据,总共得到数据14组。 4.3 野外操作 1. 排线,布检波器 第一道测线 第二道测线
姓名: 班级:地球物理1701班学号:0110170 实验一经纬仪认识与使用 一、实验名称:经纬仪认识与使用 二、实验目的与要求: 1、了解光学经纬仪的基本构造,各部件的名称和作用。 2、掌握经纬仪对中、整平、瞄准和读数的基本方法。 三、实验仪器: 经纬仪1台,三脚架1个。 四、实验内容: 1、熟悉经纬仪的构造,熟悉各部件功能及使用; 2、掌握经纬仪对中整平方法; 3、熟悉经纬仪测角的流程; 4、掌握经纬仪测水平角、垂直角的瞄准方法; 5、按物理实验报告格式,独立编写并提交一份实验报告。 五、实验原理与方法: 1、经纬仪的构造及各部件功能及使用方法 DJ6 经纬仪由三部分组成:照准部、水平度盘、基座组成。各部件名称如图1 所示。 图 1 经纬仪各部件名称 1)各部件功能及使用各种旋钮的作用与经纬仪基本一致,在实验过程中进一步加深认识。
水平制动螺旋:粗瞄后制动,照准部则不能转动;水平微动螺旋:水平 制动螺旋制动后,水平微动螺旋可以小范围微动, 用于精确照准目标;竖直制动螺旋: 粗瞄后制动,望远镜则不能转动; 竖直微动螺旋:竖直制动螺旋制动后,竖直微动螺旋可以小范围微动, 用于精确照准目标; 脚螺旋:用于对中和整平仪器; 物镜调焦螺旋:旋转该螺旋,进行物镜调焦,看清目标成像。目 镜调焦螺旋:旋转该螺旋,进行目镜调焦,看清十字丝成像。指 标水准管调节螺旋:调节该螺旋,使指标水准管气泡居中。反光 镜:360 度转动反光镜,是读数窗的亮度最大。 光学对点器:用于仪器对中。 2、经纬仪使用方法 使用经纬仪进行角度测量,按以下流程进行:安置仪器—仪器对中整平—瞄准——读数。如果是垂直角测量,在读数前应使指标水准管气泡居中。 1)对中整平 (1)安置仪器 将三脚架成正三角形打开,测站点在三角形中心,架头大致水平,拧紧固定螺旋将仪器安置在架头上。 (2)精确对中如果测站点位未出现在光学对点器视野中,可两手各握住一个脚架架腿移动脚架,使测站点位大致位于对点器标识圆圈附近,最后用脚螺旋精确对中。 (3)粗略整平 33
地球物理学基础复习资料 绪论 一.地球物理学的概念,研究特点和研究内容 它是以地球为研究对象的一门应用物理学,是天文学,物理学与地质学之间的 边缘学科。 地球物理学应用物理学的原理和方法研究地球形状,内部构造,物质组成及其 运动规律,探讨地球起源,形成以及演化过程,为维护生态环境,预测和减轻地球 自然灾害,勘探与开发能源和资源做出贡献。包扩地震学,地磁学,地电学,重力 学,地热学,大地测量学,大地构造物理学,地球动力学等。 研究特点:1.交叉学科地球物理学由地质学和物理学发展而来,随着学科 本身的发展,它不断产生新的分支学科,同时促进了各分支学科的相互交叉,加 强了它与地球科学各学科之间的联系。2.间接性都是通过观测和研究物理场的 信息内容实现地质勘查目标,研究的不是地质体本身,而是其物理性质。3 多解 性正演是唯一的,而反演存在多解。不同的地质体具有不同的物理性质,但产 生的物理场可能相同。不同的地质体具有相近的物理性质,由于观测误差,物理 场的观测不完整以及物理场特点研究不够,产生多解。不同的地质体具有相同的 物理性质,即使知道了地质体的物性分布,也无法确定其地质属性。 地球物理学的总趋势:多学科综合和科学的国际合作。 二.地球物理学各分支所依据的物理学原理和研究的物性参数。 地震学:波在弹性介质中的传播。地震体波走时,面波频散,自由振荡的本征 谱特征 重力学:牛顿万有引力定律。地球的重力场和重力位 地磁学:麦克斯韦电磁理论。地磁场和地磁势。 古地磁学:铁磁学。岩石的剩余磁性。 地电学:电磁场理论。天然电场和大地电场 地热学:热学规律,热传导方程。地球热场,热源。 第一章太阳系和地球 一.地球的转动方式。 1.自转地球绕地轴的一种旋转运动,方向自西向东,转速并非完全均匀,有微小变化。 2.公转地球绕太阳以接近正圆的椭圆轨道旋转的运动。 3.平动地球随整个太阳系在宇宙太空中不停地向前运动。 4.进动地球由于旋转,赤道附近向外凸出,日月对此凸出部分的吸引力使地 轴绕黄轴转动,方向自东向西。这种在地球运动过程中,地轴方向发生的运动即 为地球的进动。 5.章动。地轴在空间的运动不仅仅是沿一平滑圆锥面上的转动,地轴还以很小 的振幅在锥面内,外摆动,地球的这种运动叫章动。 二.地球的形状及影响因素。 地球为一梨形不规则回转椭球体。 影响因素:1.地球的自引力---正球体;2.地球的自转----标准扁球体;3.地球内 部物质分布不均匀--不规则回转椭球体
实验内容 (一)直流电机双环调速系统实验,此时必须松开连轴节!不带动工作台! 1. 测试电流环特性 ,由于外接霍尔传感器只有一套,有五套PWM 放大器有电流输出(接成跟随器方式,其电流采样输出为25芯D 型插座的17(模拟地),19脚,但模拟地是电流环的模拟地,不是实验箱运算放大器OP07的地!所以,只能用万用表量测。多数同学可用手堵转,给定微小的输入电压(小于±50mV )加入到电流环输入端,再加大就必须松开手,观察电机转速能否控制?为什么?如果要测试电流环静态特性,必须用台钳夹住电机轴,保证电机堵转。所以此项实验由教师按图22进行,这里只给出以下数据: 图 22 电流环静态特性实验接线图 (1)霍尔传感器的校准 利用直流稳压电源和电流表校准霍尔传感器,该 传感器为LEM-25,当原边为1匝时,量程为25A ,而原边采用5匝时, 量程为5A ;现在按后者的接法实验,M R 约500Ω。 (2)然后利用它来测试PWM 功率放大器的静态传递系数。电流环的静态特性如表2所示。注意电机是堵转的!
1V;得到通频带400Hz. 2.根据给定参数,利用MATLAB设计速度环的校正装置参数,画出校正前后的Bode图调,到实验室自己接线,教师检查无误后,可以通电调试;首先,正确接线保证系统处于负反馈,如果正反馈会产生什么现象?如何通过开环特性判断测速反馈是负反馈?对此有正确定答案后方能够开始实验。 (1)在1 β和β=0.4~0.5时分别调试校正装置的参数,使其单位阶跃输入的 = 响应曲线超调量最小,峰值时间最短,并记录阶跃响应曲线的特征值; 能够用A/D卡把数据采集到计算机中更好! (2)断开电源,记录最佳的校正装置参数; (3)测试速度环静态特性,为加快测试速度,可直接测试输入电压和测速机电压的关系;在转速低的情况下用手动阻止电机的转动,是否会影响转速? 为什么?分析速度环的机械特性(转速与负载力矩的关系曲线称为机械特 性),从而说明系统的刚度。 (4)有条件的小组可测试速度环频率特性(只测量幅频特性)。 (二)电压-位置伺服系统实验 开始,也必须脱开电机与工作台的连轴节!直到位置环调试好后,再把连轴节连接好! 1.断开使能,手动电机转动,检查电子电位计工作的正确性! 2.让位置环开环,利用调速系统,观察电子电位计在大范围工作的正确性,可利用示波器或万用表测试电位计的输出。 3.位置环要使用实验箱的头2个运算放大器,所以必须注意注意位置反馈的极性;为保证位置反馈是负反馈,必须通过位置系统开环来判断,这时位置调节器只利用比例放大器,如果发现目前的接线是正反馈后,怎么接线? 4.将位置环的位置反馈正确接到反馈输入端,利用给定指令电位计,移动它,使电机位置按要求转动。正确后,即可把连轴节连接好,连接连轴节时用专用内六角扳手。这时应该断电! 5.按设计的校正装置连接好,再上电。测试具有比例放大器和近似比例积分调节器时的阶跃响应曲线,并记录之; 6.测试输入电压-位置的传递特性曲线; 7.用手轮加小力矩估计系统的(电弹簧)刚度。 三、实验报告要求 (一)速度环实验 1.对速度环建模,画出速度环方块图,传递函数图 2.画出校正前后的Bode图,设计校正装置及其参数; 3.写出实验原始数据,整理出静态曲线和动态数据; 4.从理论和实际的结合上,分析速度环的特点,并写出实验的收获和改进意见; (二)位置环实验 1.对位置环建模,画出位置环方块图,传递函数图;
地球物理勘探课程报告 学号:20111002833 班级:012111 姓名:李海亮 指导老师:曲赞
序言 叙述学习本课程的目的、任务和重要性 地球物理勘探方法是以岩矿石等介质的物理性质差异为基础,利用物理学原理,通过观测和研究地球物理场的空间与时间分布规律,以实现基础地质研究,环境工程勘察和地质找矿等目的的一门应用科学。 通过本课程的学习,我们应当了解和掌握各种地球物理勘探方法的基本原理,了解这些勘探方法在基础地质研究,矿产勘查等领域的应用,学会在自己专业中运用地球物理勘探方法;学会利用地球物理资料去分析和解决各种地质问题。 第一节重力勘探 重力方法的物理原理和重力方法的特点 原理重力勘探是利用地质体与围岩之间的密度差在地表产生的重力异常来确定地质体形状、大小、埋深等因素,从而对工作地区的地质构造和矿产分布情况作出判断的一种地球物理勘探方法。重力异常是重力勘探的主要研究对象,其实质就是地壳内部物质密度分布不均匀,地质体与围岩间有质量差,即剩余质量,剩余质量产生了一个指向地质体质量中心的附加引力,该引力在正常重力方向上的投影即为重力异常。得出重力异常后,再对其进行地形、高度、中间层和正常校正后,便可得出由地质体引起的异常。 为了了解不同形状、大小、产状的地质体所引起的异常,需进行异常的正演计算,即计算一些简单规则几何体引起的重力异常特征,利用它们来近似代替不同特征的实际地质体;而反演则正好相反,是已知地质体的异常特性,来推算其几何特征。反演是最终解决实际问题的关键,目标是寻找、研究或推断金属或非金属矿体和研究地质构造等。 特点相比其他勘探方法,重力勘探的特点在于:①可利用重力勘探透过覆 盖层寻找隐伏的地质构造或盲矿体;②仪器轻便、观测简单、工作效率高、施工 进度快、成本低;③应用范围广,目前可用于找矿、划分大地构造单元、石油天 然气勘探、工程勘探等。 如何利用重力方法来解决地质问题(举例说明) 基本方法为:重力勘探——发现异常——综合分析、反演推测——实际探测——正演计算、推测异常是否合理 重力法在天然地震预报,油气、煤炭、金属非金属矿及地下水勘查,海洋环 境调查,了解上地幔的密度变化、研究地壳深部构造及地壳地活动性、划分大地 构造单元等领域有着重要的应用。 例如20世纪70年代在吉林省某地区进行勘探金矿石时,采用的是重力法勘探,成功发现了含铜硫铁矿。该区已发现小型矽卡岩磁铁矿。为了扩大矿区范围,
《控制工程基础》实验报告 姓名欧宇涵 914000720206 周竹青 914000720215 学院教育实验学院 指导老师蔡晨晓 南京理工大学自动化学院 2017年1月
实验1:典型环节的模拟研究 一、实验目的与要求: 1、学习构建典型环节的模拟电路; 2、研究阻、容参数对典型环节阶跃响应的影响; 3、学习典型环节阶跃响应的测量方法,并计算其典型环节的传递函数。 二、实验内容: 完成比例环节、积分环节、比例积分环节、惯性环节的电路模拟实验,并研究参数变化对其阶跃响应特性的影响。 三、实验步骤与方法 (1)比例环节 图1-1 比例环节模拟电路图 比例环节的传递函数为:K s U s U i O =)()(,其中1 2R R K =,参数取R 2=200K ,R 1=100K 。 步骤: 1、连接好实验台,按上图接好线。 2、调节阶跃信号幅值(用万用表测),此处以1V 为例。调节完成后恢复初始。 3、Ui 接阶跃信号、Uo 接IN 采集信号。 4、打开上端软件,设置采集速率为“1800uS”,取消“自动采集”选项。 5、点击上端软件“开始”按键,随后向上拨动阶跃信号开关,采集数据如下图。 图1-2 比例环节阶跃响应
(2)积分环节 图1-3 积分环节模拟电路图 积分环节的传递函数为: S T V V I I O 1 -=,其中T I =RC ,参数取R=100K ,C=0.1μf 。 步骤:同比例环节,采集数据如下图。 图1-4 积分环节阶跃响应 (3)微分环节 图1-5 微分环节模拟电路图 200K R V I Vo C 2C R 1 V I Vo 200K
地球物理探矿法 一、地球物理探矿法的基本原理 物探的基本特点是研究地球物理场或某些物理现象。如地磁场、地电场、放射性场等,而不是直接研究岩石或矿石,它与地质学方法有着本质上的不同。通过场的研究可以了解掩盖区的地质构造和产状。它的理论基础是物理学或地球物理学,系把物理学上的理论(地电学、地磁学等)应用于地质找矿。因此具有下列特点和工作前提: (一)物探的特点 1.必须实行两个转化才能完成找矿任务。先将地质问题转化成地球物理探矿的问题,才能使用物探方法去观测。在观测取得数据之后(所得异常),只能推断具有某种或某些物理性质的地质体,然后通过综合研究,并根据地质体与物理现象间存在的特定关系,把物探的结果转化为地质的语言和图示,从而去推断矿产的埋藏情况与成矿有关的地质问题,最后通过探矿工程验证,肯定其地质效果。 2.物探异常具有多解性。产生物探异常的原因,往往是多种多样的。这是由于不同的地质体可以有相同的物理场,故造成物探异常推断的多解性。如磁铁矿、磁黄铁矿、超基性岩,都可以引起磁异常。所以工作中采用单一的物探方法,往往不易得到较肯定的地质结论。一般情况应合理地综合运用几种物探方法,并与地质研究紧密结合,才能得到较为肯定的结论。 3.每种物探方法都有要求严格的应用条件和使用范围。因为矿床地质、地球物理特征及自然地理条件因地而异,从而影响物探方法的有效性。 (二)物探工作的前提 在确定物探任务时,除地质研究的需要外,还必须具备物探工作前提,才能达
到预期的目的。物探工作的前提主要有下列几方面: 1.物性差异,即被调查研究的地质体与周围地质体之间,要有某种物理性质上的差异。 2.被调查的地质体要具有一定的规模和合适的深度,用现有的技术方法能发现它所 引起的异常。若规模很小、埋藏又深的矿体,则不能发现其异常;有时虽然地质体埋藏较深,但规模很大,也可能发现异常。故找矿效果应根据具体情况而定。 3.能区分异常,即从各种干扰因素的异常中,区分所调查的地质体的异常。如铬铁矿和纯橄榄岩都可引起重力异常,蛇纹石化等岩性变化也可引起异常,能否从干扰异常中找出矿异常,是方法应用的重要条件之一。 二、地球物理探矿法的应用及其地质效果 (一)应用物探找矿的有利条件与不利条件 1.物探找矿有利条件:地形平坦,因物理场是以水平面做基面,越平坦越好;矿体形态规则;具有相当的规模,矿物成分较稳定;干扰因素少;有较详细的地质资料。最好附近有勘探矿区或开采矿山,有已知的地质资料便于对比。 2.物探找矿的不利条件:物性差异不明显或物理性质不稳定的地质体;寻找的地质体或矿体过小过深,地质条件复杂;干扰因素多,不易区分矿与非矿异常等。 (二)物探方法的种类、应用条件及地质效果简要列于表4—5。 物探方法的选择,一般是依据工作区的下列三方面情况,结合各种物探方法的特点进行选择:一是地质特点,即矿体产出部位、矿石类型(是决定物探方法的依据)、矿体的形态和产状(是确定测网大小、测线方向、电极距离大小与排列方式等决定因素);二是地球物理特性,即岩矿物性参数,利用物性统计参数分析地质构
大学物理实验报告范文 科技实验报告是描述、记录某个科研课题过程和结果的一种科技应用文体。撰写实验报告是科技实验工作不可缺少的重要环节。下面是小编为大家整理的最新小学生零花钱调查报告,欢迎阅读参考! 精确测定银川地区的重力加速度 测量结果的相对不确定度不超过5% 初步确定有以下六种模型方案: 方法一、用打点计时器测量 所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 利用自由落体原理使重物做自由落体运动.选择理想纸带,找出起始点0,数出时间为t的P点,用米尺测出OP的距离为h,其中t=0.02秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、取半径为R的玻璃杯,内装适当的液体,固定在旋转台上.旋转台绕其对称轴以角速度ω匀速旋转,这时
液体相对于玻璃杯的形状为旋转抛物面 重力加速度的计算公式推导如下: 取液面上任一液元A,它距转轴为x,质量为m,受重力mg、弹力N.由动力学知: Ncosα-mg=0 (1) Nsinα=mω2x (2) 两式相比得tgα=ω2x/g,又tgα=dy/dx,∴dy=ω2xdx/g, ∴y/x=ω2x/2g. ∴ g=ω2x2/2y. .将某点对于对称轴和垂直于对称轴最低点的直角坐标系的坐标x、y测出,将转台转速ω代入即可求得g. 方法四、光电控制计时法 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法五、用圆锥摆测量 所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆锥n转所用的时间t,则摆锥角速度ω=2πn/t 摆锥作匀速圆周运动的向心力F=mgtgθ,而tgθ=r/h
一、名词解释 1地震勘探:是以不同岩石、矿石间的弹性差异为基础,通过观测和研究地震波 在地下岩石中的传播特性,以实现地质勘查目标的一种研究方法。 2震动图:用μ~t 坐标系统表示的质点振动位移随时间变化的图形称为地震波 的震动图。 3波剖面图:某一时刻 t 质点振动位移μ随距离 x 变化的图形称之为波剖面图。 4时间场:时空函数所确定的时间 t 的空间分布称为时间场。 5等时面:在时间场中,如果将时间值相同的各点连接起来,在空间构成一个面,在面中任意点地震波到达的时间相等,称之为等时面。 6横波:弹性介质在发生切变时所产生的波称之为横波,即剪切形变在介质中传 播又称之为剪切波或 S 波。 7纵波:弹性介质发生体积形变(即拉伸或压缩形变)所产生的波称为纵波,又 称压缩波或 P 波。 8频谱分析:对任一非周期地震阻波进行傅氏变换求域的过程。 9波前面:惠更斯原理也称波前原理,假设在弹性介质中,已知某时刻 t1波前面上的各点,则可把这些点看做是新的震动源,从 t 1时刻开始产生子波向外传播, 经过t 时间后,这些子波波前所构成的包拢面就是t1+ t 时刻的新的波前面。 10视速度:沿观测方向,观测点之间的距离和实际传播时间的比值,称之为视 速度。 V* 11观测系统 :在地震勘探现场采集中,为了压制干扰波和确保对有效波进行√× 追踪,激发点和接收点之间的排列和各排列的位置都应保持一定的相对关系,这种激发点和接收点之间以及排列和排列之间的位置关系,称之为观测系统。
12水平叠加:又称共反射点叠加或共中心点叠加,就是把不同激发点不同接收 点上接收到的来自同一反射点的地震记录进行叠加。 13时距曲线:一种表示接收点距离和地震波走时的关系曲线,通常以接收点到 激发点的距离为横坐标,地震波到达该接收点的走时为纵坐标。 14同向轴:在地震记录上相同相位的连线。 15波前扩散:已知在均匀介质中,点震源的波前为求面,随着传播距离的增大, 球面逐渐扩展,但是总能量保持不变,而使单位面积上的能量减少,震动的振幅将随之减小,这称之为球面扩散或波前扩散。 二、判断题 1.视速度小于等于真速度。× 2.平均速度大于等于均方根速度。× 3.仅在均匀介质时,射线与波前面正交。× 4.纵波和横波都是线性极化波。× 5.地震子波的延续时间长度同它的频带宽度成正比。× 6.倾斜界面情况下,折射波上倾方向接收时的视速度等于下倾方向的视速度。× 7.折射波时距曲线是通过原点的直线,视速度等于界面速度。× 12.瑞雷面波是线性极化波。× 8.折射波的形成条件是地下存在波阻抗界面。× 9.对水平多层介质,叠加速度是均方根速度。√ 10.从各个方向的测线观测到的时距曲线极小点位置,一般可以确定反射界面的 大致倾向。√ 11.相遇观测系统属于折射波法的观测系统√
页眉 实验1 模拟控制系统在阶跃响应下的特性实验一、实验目的 根据等效仿真原理,利用线性集成运算放大器及分立元件构成电子模拟器,以干电池作为输入信号,研究控制系统的阶跃时间响应。 二、实验内容 研究一阶与二阶系统结构参数的改变,对系统阶跃时间响应的影响。 三、实验结果及理论分析 1.一阶系统阶跃响应 a.电容值1uF,阶跃响应波形: b.电容值2.2uF,阶跃响应波形: 页脚 页眉
,阶跃响应波形:电容值c.4.4uF 阶系统阶跃响应数据表2.一稳态终值U(∞)(V)时间常数T(s) 电容值c(uF)理论值实际值实际值理论值0.50 2.87 1.0 0.51 2.90 1.07 2.90 2.2 2.87 1.02 2.06 2.90 2.87 4.4 2.24 元器件实测参数=505kU= -2.87V R? R=496k? =500kR?2o1r其中 T?RC2U(?)??(R/R)U rc21页脚 页眉 误差原因分析: ①电阻值及电容值测量有误差;
②干电池电压测量有误差; ③在示波器上读数时产生误差; ④元器件引脚或者面包板老化,导致电阻变大; ⑤电池内阻的影响输入电阻大小。 ⑥在C=4.4uF的实验中,受硬件限制,读数误差较大。 3.二阶系统阶跃响应 a.阻尼比为0.1,阶跃响应波形: b.阻尼比为0.5,阶跃响应波形: 页脚 页眉 ,阶跃响应波形:0.7c.阻尼比为
,阶跃响应波形:阻尼比为1.0d. 阶系统阶跃响应数据表4.二ξR(?)峰值时间U(t) 调整时间稳态终值超调(%)震荡次数pow M()t)t(s V()(s UV)N psps6 62.7 2.8 0.3 0.1 2.95 454k 4.8 1 0.5 0.5 3.3 52.9k 2.95 11.9 0.4 1 0.7 0.3 0.4 24.6k 3.0 2.7 2.92 1.0 1.0 2.98 1.0 2.97k 2.98 页脚 页眉 四、回答问题
地球物理反演理论 一、解释下列概念 1.分辨矩阵 数据分辨矩阵描述了使用估计的模型参数得到的数据预测值与数据观测值的拟合程度,可以表示为[][]pre est g obs g obs obs d Gm G G d GG d Nd --====,其中,方阵g N GG -=称为数据分辨矩阵。它不是数据的函数, 而仅仅是数据核G (它体现了模型及实验的几何特征)以及对问题所施加的任何先验信息的函数。 模型分辨矩阵是数据核和对问题所附加的先验信息的函数,与数据的真实值无关,可以表示为()()est g obs g true g ture ture m G d G Gm G G m Rm ---====,其中R 称为模型分辨矩阵。 2.协方差 模型参数的协方差取决于数据的协方差以及由数据误差映射成模型参数误差的方式。其映射只是数据核和其广义逆的函数, 而与数据本身无关。 在地球物理反演问题中,许多问题属于混定形式。在这种情况下,既要保证模型参数的高分辨率, 又要得到很小的模型协方差是不可能的,两者不可兼得,只 有采取折衷的办法。可以通过选择一个使分辨率展布与方差大小加权之和取极小的广义逆来研究这一问题: ()(1)(cov )u aspread R size m α+- 如果令加权参数α接近1,那么广义逆的模型分辨矩阵将具有很小的展布,但是模型参数将具有很大的方差。而如果令α接近0,那么模型参数将具有相对较小的方差, 但是其分辨率将具有很大的展布。 3.适定与不适定问题 适定问题是指满足下列三个要求的问题:①解是存在的;②解是惟一的;③解连续依赖于定解条件。这三个要求中,只要有一个不满足,则称之为不适定问题 4.正则化 用一组与原不适定问题相“邻近”的适定问题的解去逼近原问题的解,这种方法称为正则化方法。对于方程c Gm d =,若其是不稳定的,则可以表述为()T T c G G I m G d α+=,其中α称为正则参数,其正则解为1()T T c m G G I G d α-=+。这种方法叫做正则化方法。 5.多解性 由于观测数据并非无限,以及观测数据具有误差,使解具有多解性。 6.稳定性 反演问题就是从数据空间到模型空间的映射问题,如果数据空间有一个小范围的变化,相应于模型空间存在一个大范围的变化,则成这种映射或反演是不稳定的。实践证明,地球物理学中的反演问题都是不稳定的,只是严重程度不同罢了。
南理工控制工程基础实验报告 成绩:《控制工程基础》课程实验报告班级:学号:姓名:南京理工大学2015年12月《控制工程基础》课程仿真实验一、已知某单位负反馈系统的开环传递函数如下G(s)?10 s2?5s?25借助MATLAB和Simulink完成以下要求:(1) 把G(s)转换成零极点形式的传递函数,判断开环系统稳定性。>> num1=[10]; >> den1=[1 5 25]; >> sys1=tf(num1,den1) 零极点形式的传递函数:于极点都在左半平面,所以开环系统稳定。(2) 计算闭环特征根并判别系统的稳定性,并求出闭环系统在0~10秒内的脉冲响应和单位阶跃响应,分别绘出响应曲线。>> num=[10];den=[1,5,35]; >>
sys=tf(num,den); >> t=[0::10]; >> [y,t]=step(sys,t); >> plot(t,y),grid >> xlabel(‘time(s)’) >> ylabel(‘output’) >> hold on; >> [y1,x1,t]=impulse(num,den,t); >> plot(t,y1,’:’),grid (3) 当系统输入r(t)?sin5t时,运用Simulink搭建系统并仿真,用示波器观察系统的输出,绘出响应曲线。曲线:二、某单位负反馈系统的开环传递函数为:6s3?26s2?6s?20G(s)?4频率范围??[,100] s?3s3?4s2?2s?2 绘制频率响应曲线,包括Bode图和幅相曲线。>> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> bode(sys,{,100}) >> grid on >> clear; >> num=[6 26 6 20]; >> den=[1 3 4 2 2]; >> sys=tf(num,den); >> [z , p , k] = tf2zp(num, den); >> nyquist(sys) 根据Nyquist判据判定系统的稳定性。
地震勘探实验报告 院系:_____________ 专业:_____________ 班级:_____________ 姓名:_____________ 2014年5月5日
地震勘探野外实验报告 一、基本任务 1.1 实验目的和要求 实验按指导书要求完成,以便通过此次实验,达到巩固和加深对校内课堂理论教学内容的理解和认识,提高分析和解决实际生产问题的能力;培养学生严肃认真的学习态度,理论联系实际,实事求是的科研作风;团结协作的精神。具体要求如下: 1、初步实践野外地震勘探各种技术工作; 2、基本掌握野外数据采集方法技术和地震仪器装备的使用和操作; 3、学习地震记录的分析与评价; 4、学习地震资料几种常规处理方法; 5、学习反射波地震勘探资料的构造解释。 1.2 实验内容 实验主要内容为:地震勘探野外数据采集方法作业,简单的数据处理和室内资料的解释成图,具体包括如下内容: 1、野外数据采集 ①工区地质、地球物理概况及地震地质条件的了解; ②测线布置依据和观测系统设计; ③排列的布设; ④仪器的学习及操作; ⑤仪器参数和观测系统参数的试验及正确设置; ⑥野外数据采集施工技术; 2、室内数据处理; 3、室内资料解释和成图 二、数据采集仪器 1、一台McSEIS-SX 48 XP地震仪(配件:一条电源线,一条大缆接受器,一个鼠标)(图一) 2、两根5m大缆 3、24个100Hz检波器 4、一块12V蓄电池 5、一条同步触发道 6、激发装置:一把18磅铁锤,一个铁块
7、测绳一根 9、罗盘一个 10、野外记录本 图一地震仪 图二部分实验仪器
三、野外地震勘探数据采集 3.1 测线的布置 测线布置的原则:主测线的方向,应尽可能地垂直地层或构造走向,并与设有地质钻井以及其他物探测线的方向重合,以利于各种勘探资料的对比分析和相互补充验证,主测线之间还应布置联络测线,以控制勘探精度。(图三) 图三测线布设 3.2 观测系统设计 反射波勘探一般采用多次覆盖系统。表示出共炮点线(含道号),共接收点线,共偏移距线,共CDP点线,并标出炮号、桩号、道号、道间距、覆盖次数和比例尺。(图四) 3.3 激发 实验采用锤击震源,采用18磅的铁锤以及15~25cm见方、重10~20kg的铁板作为锤击激发震源。激发点应平整、坚实、表层浮土应予清除,垫板要摆放平实。 3.4 接收 (1) 检波器的选择:根据勘探目的和勘探深度选择浅层反射波勘探100Hz的检波器。 (2) 检波器埋置:检波器要平稳、垂直(倾斜度应小于10o)、埋实在接收点位置上。检波器与电缆连接应正确,防止漏水造成的漏电和地面渍水造成的短路,也要防止极性接反和接触不良。(图五)