
温度控制与PID算法
温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。
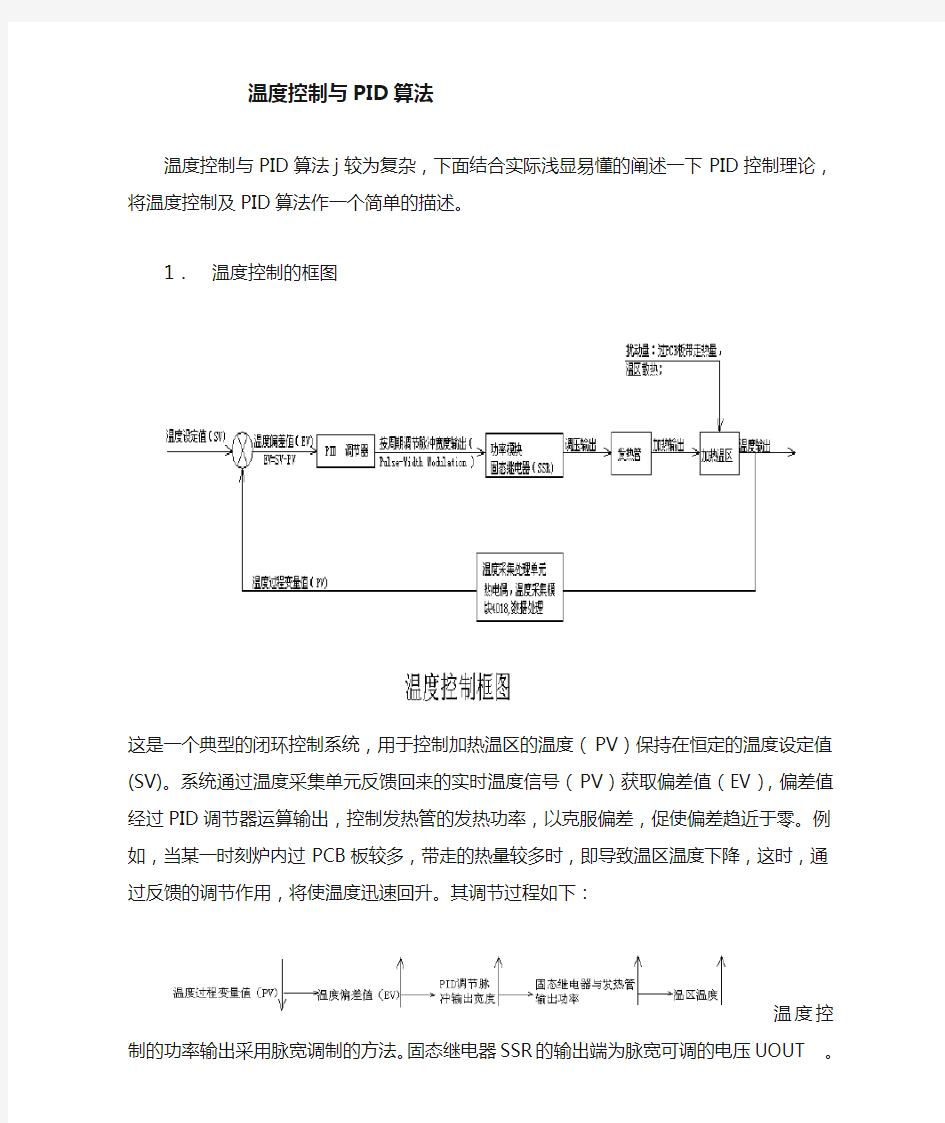
1.温度控制的框图
这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。其调节过程如下:
温度控制的功率输出采用脉宽调制的方法。固态继电器SSR的输出端为脉宽可调的电压U OUT 。当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN
其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。
2.温度控制的两个阶段
温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。这给温度的控制带来了困难。因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。为了合理地处理系统响应速度(即加热速度)与系统稳定性之间地矛盾,我们把温度控制分为两个阶段。
(1)PID调节前阶段
在这个阶段,因为温区的温度距离设定值还很远,为了加快加热速度,SSR与发热管处于满负荷输出状态,只有当温度上升速度超过控制参数“加速速率”,SSR 才关闭输出。“加速速率”描述的是温度在单位时间的跨度,反映的是温度升降的快慢,如上图所示。用“加速速率”限制温升过快,是为了降低温度进入PID调节区的惯性,避免首次到达温度设定值(SV)时超调过大。
在这个阶段,要么占空比K=0, SSR关闭;要么占空比K=100%, SSR全速输出。
PID调节器不起作用,仅由“加速速率”控制温升快慢。
(2)PID调节阶段
在这个阶段,PID调节器调节输出,根据偏差值计算占空比(0-100%),保证偏差(EV)趋近于零,即使系统受到外部干扰时,也能使系统回到平衡状态。
3.PID算法
PID控制的原理是基于下面的算式:输出M(t)是比例项,积分项和微分项的函数。
其中:
M(t) PID回路的输出,是时间的函数
Kc PID回路的比例增益
e PID回路的偏差(设定值(SV)与过程变量(PV)之差)
Minitial PID回路的静态输出值
为了能让数字计算机处理这个算式,连续算式必须离散化为周期采样偏差算式,才能用来计算输出值。数字计算机处理的算式如下:
从这个公式可以看出,积分项是从第一个采样周期到当前采样周期所有误差项的函数,微分项是当前采样和前一次采样的函数,比例项仅是当前采样的函数。
在数字计算机中,不保存所有的误差项,其实也不必要。由于计算机从第一次采样开始,每有一个过程采样值必须计算一次输出值,只需要保存前一次过程值(PVn-1)和积分项前值。利用计算机处理的重复性,可以将以上算式变换为:
其中:
Mn 在第n 采样时刻,PID回路的输出计算值
SV PID 回路设定值
PVn 在第n 采样时刻的过程变量值
PVn-1 在第n-1 采样时刻的过程变量值
MX 积分前项值
Mintial PID回路的静态输出值
Kc PID回路的比例增益
KI 积分项的比例常数KI=Kc * Ts / Ti
Ts是离散化时的采样时间间隔Ti是积分时间参数;
KD 微分项的比例常数KD=Kc * Td / Ts
Ts是离散化时的采样时间间隔Td是微分时间参数;
从上面PID的算式,可以分析三个基本参数Kc, KI, KD在实际控制中的作用:
(1)比例调节作用:比例项按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少偏差。
但是过大的比例调节,使系统的稳定性下降,甚至造成系统的不稳定。
(2)积分调节作用:积分项消除系统的稳态误差,提高无差度。只要有偏差,积分就进行,直到无偏差时,积分运算才停止,积分调节项输出一常数值。积分作
用的强弱取决于积分时间常数Ti,Ti越小,积分作用越强。积分控制可提高
系统的无差度,但积分项输出响应缓慢,使得系统调节时间增长。
(3)微分调节作用:微分项反映系统过程变量的变化率((PVn-1-PVn)/ Ts),具有预见性,能预见变化的趋势,因此,能产生超前的调节作用,在偏差还没有
形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分
时间参数Td选择合适的情况下,可以减少超调,减少调节时间。微分调节对
干扰有放大效果,过强的微分调节,对系统抗干扰不利。此外,微分项反映的
是过程变量的变化率,而当过程变量没有变化时,微分调节输出为零。微分调
节不能单独使用,需要与另外两种调节规律相结合,组成PD或PID调节器。以上面的推导,C程序如下
/*
pid算法C源程序,还有实现pid自动调整。51用于控制温度26-100摄氏度。
TIME:2011-07-29 20:15:07
*/
#include
#include "global_varible.h"
/****************************************************************************
* 模块名: PID
* 描述: PID调节子程序
* 采用PID-PD算法。在偏差绝对值大于△e时,用PD算法,以改善动态品质。* 当偏差绝对值小于△e时,用PID算法,提高稳定精度。
* PIDout=kp*e(t)+ki*[e(t)+e(t-1)+...+e(1)]+kd*[e(t)-e(t-1)]
*===================================================================== =======
* 入口: 无
* 出口: 无
* 改变: PID_T_Run=加热时间控制
*****************************************************************************/ void PID_Math(void)
{
signed long ee1; //偏差一阶
//signed long ee2; //偏差二阶
signed long d_out; //积分输出
if(!Flag_PID_T_OK)
return;
Flag_PID_T_OK = 0;
Temp_Set = 3700; //温度控制设定值37.00度
PID_e0 = Temp_Set - Temp_Now; //本次偏差
ee1 = PID_e0 - PID_e1; //计算一阶偏差
//ee2 = PID_e0-2*PID_e1+PID_e2; //计算二阶偏差
//一阶偏差的限制范围
if(ee1 > 500) ee1 = 500;
if(ee1 < -500) ee1 = -500;
PID_e_SUM += PID_e0; //偏差之和
//积分最多累计的温差
if(PID_e_SUM > 200) PID_e_SUM = 200;
if(PID_e_SUM < -200) PID_e_SUM = -200;
PID_Out = PID_kp * PID_e0 + PID_kd * ee1; //计算PID比例和微分输出
if(abs(PID_e0) < 200) //如果温度相差小于1.5度则计入PID积分输出
{
if(abs(PID_e0) > 100){ //如果温度相差大于1度时积分累计限制if(PID_e_SUM > 100) PID_e_SUM = 100;
if(PID_e_SUM < -100) PID_e_SUM = -100;
}
d_out = PID_ki * PID_e_SUM; //积分输出
if(PID_e0 < -5){ //当前温度高于设定温度0.5度时积分累计限制
if(PID_e_SUM > 150) PID_e_SUM = 150;
if(PID_e_SUM > 0) d_out >>= 1; //当前温度高于设定温度0.5度时削弱积分正输出
}
PID_Out += d_out; //PID比例,积分和微分输出}
else
PID_e_SUM=0;
PID_Out /= 100; //恢复被PID_Out系数放大的倍数
if(PID_Out > 200) PID_Out=200;
if(PID_Out<0) PID_Out=0;
if(PID_e0 > 300) PID_Out=200; //当前温度比设定温度低3度则全速加热
if(PID_e0 < -20) PID_Out=0; //当前温度高于设定温度0.2度则关闭加热
Hot_T_Run = PID_Out; //加热时间控制输出
// PID_e2 = PID_e1; //保存上次偏差
PID_e1 = PID_e0; //保存当前偏差
}
锅炉温度控制系统上位机设计 1.设计背景 锅炉是化工、炼油、发电等工业生产过程中必不可少的重要的动力设备。它所产生的高压蒸汽,既可以作为风机、压缩机、大型泵类的驱动透平的动力源,又可作为蒸馏、化学反应、干燥和蒸发等过程的热源。随着工业生产规模的不断扩大,生产设备的不断创新,作为全厂动力和热源的锅炉,办向着大容量、高参数、高效率发展。为了确保安全,稳定生产,锅炉设备的控制系统就显得愈加重要。随着经济的迅猛发展,自动化控制水平越来越高,用户对锅炉控制系统的工作效率要求也越来越高,为了提高锅炉的工作效率,较少对环境的污染问题,所以利用计算机与组态软件技术对锅炉生产过程进行自动控制有着重要的意义。 2.任务要求 (1) 按照题目设计监控画面及动态模拟; (2) 在数据字典中定义需要的内存变量和I/O变量; (3) 实现监控系统的实时、历史曲线及报警界面显示; (4) 实现保存数据和参数报表打印功能; (5) 实现登陆界面和帮助界面。 3. 界面功能 3.1 系统说明 本系统的目的是实现锅炉的温度控制,所以在监控界面设置了加热部分和降温部分,同时通过观察相应仪表,操作者手动的实现对锅炉温度的控制,而且在加热过程和降温过程中有信号灯可以清楚地显示系统工作在什么阶段。此外,在监控界面加入了液位控制部分,通过对进水量和出水量的控制实现液位平衡。实时曲线和历史曲线可以让操作者清楚地观察到锅炉内液体的液位高度和温度,从而更加准确的操作系统,达到控制要求。实时报警界面可以随时进行提醒,防止发生意外情况。帮助界面可以让初次登陆该系统的用户快速学会如何操作系统。登陆界面中加入用户登陆部分,只有有相应权限的操作者也可以控制系统。该系统还加入历史曲线打印功能和对系统相关变量的保存功能,用户可以随时查看历史记录。 3.2主监控界面 主控界面实现的是操作者观察仪表,得到锅炉内液体温度和液位的实时信息,通过调节电磁阀1、2,使得锅炉内液体液位保持在要求范围内,通过加热按钮和降温按钮对
郑州科技学院 《模拟电子技术》课程设计 题目温度控制器 学生姓名 专业班级 学号 院(系)信息工程学院 指导教师 完成时间 2015年12月31日
郑州科技学院 模拟电子技术课程设计任务书 专业 14级通信工程班级 2班学号姓名 一、设计题目温度控制器 二、设计任务与要求 1、当温度低于设定温度时,两个加热丝同时通电加热,指示灯发光; 2、当水温高于设定温度时,两根加热丝都不通电,指示灯熄灭; 3、根据上述要求选定设计方案,画出系统框图,并写出详细的设计过程; 4、利用Multisim软件画出一套完整的设计电路图,并列出所有的元件清单; 5、安装调试并按规定格式写出课程设计报告书. 三、参考文献 [1]吴友宇.模拟电子技术基础[M]. 清华大学出版社,2009.52~55. [2]孙梅生.电子技术基础课程设计[M]. 高等教育出版社,2005.25~28. [3]徐国华.电子技能实训教程[M]. 北京航空航天大学出版社,2006.13 ~15. [4]陈杰,黄鸿.传感器与检测技术[M].北京:高等教育出版社,2008.22~25. [5]翟玉文等.电子设计与实践[M].北京:北京中国电力出版社,2005.11~13. [6]万嘉若,林康运.电子线路基础[M]. 高等教育出版社,2006.27 ~29. 四、设计时间 2015 年12月21 日至2015 年12 月31 日 指导教师签名: 年月日
本设计是一种结构简单、性能稳定、使用方便、价格低廉、使用寿命长、具有一定的实用性等优点的温度控制电路。本文设计了一种温度控制器电路,该系统采用模拟技术进行温度的采集与控制。主要由电源模块,温度采集模块,继电器模块组成。 现代社会科学技术的发展可以说是突飞猛进,很多传统的东西都被成本更低、功能更多、使用更方便的电子产品所替代,本课程设计是一个以温度传感器采用LM35的环境温度简易测控系统,用于替代传统的低精度、不易读数的温度计。但系统预留了足够的扩展空间,并提供了简单的扩展方式供参考,实际使用中可根据需要改成多路转换,既可以增加湿度等测控对象,也能减少外界因素对系统的干扰。 首先温度传感器把温度信号转换为电流信号,通过放大器变成电压信号,然后送入两个反向输入的运算放大器组成的比较器电路,让电位器来改变温度范围的取值,最后信号送入比较器电路,通过比较来判断控制电路是否需要工作。此方案是采用传统的模拟控制方法,选用模拟电路,用电位器设定给定值,反馈的温度值与给定的温度值比较后,决定是否加热。 关键词:温度传感器比较器继电器
温度常用测量方法及原理 (1)压力式测温系统是最早应用于生产过程温度测量方法之一,是就地显示、控制温度应用十分广泛的测量方法。带电接点的压力式测温系统常作为电路接点开关用于温度就地位式控制。 压力式测温系统适用于对铜或铜合金不起腐蚀作用场合,优点是结构简单,机械强度高,不怕振动;不需外部电源;价格低。缺点是测温范围有限制(-80~400℃);热损失大,响应时间较慢;仪表密封系统(温包,毛细管,弹簧管)损坏难以修理,必须更换;测量精度受环境温度及温包安置位置影响较大;毛细管传送距离有限制。 (2)热电阻热电阻测量精度高,可用作标准仪器,广泛用于生产过程各种介质的温度测量。优点是测量精度高;再现性好;与热电偶测量相比它不需要冷点温度补偿及补偿导线。缺点是需外接电源;热惯性大;不能使用在有机械振动场合。 铠装热电阻将温度检测元件、绝缘材料、导线三者封焊在一根金属管内,它的外径可以做得很小,具有良好的力学性能,不怕振动。同时,它具有响应快,时间常数小的优点。铠装热电阻可制成缆状形式,具有可挠性,任意弯曲,适应各种复杂结构场合中的温度测量。 (3)双金属温度计双金属温度计也是用途十分广泛的就地温度计。优点是结构简单,价格低;维护方便;比玻璃温度计坚固、耐振、耐冲击;示值连续。缺点是测量精度较低。 (4)热电偶热电偶在工业测温中占了很大比重。生产过程远距离测温大多使用热电偶。优点是体积小,安装方便;信号远传可作显示、控制用;与压力式温度计相比,响应速度快;测温范围宽;测量精度较高;再现性好;校验容易;价
低。缺点是热电势与温度之间是非线性关系;精度比电阻低;在同样条件下,热电偶接点易老化。 (5)光学高温计光学高温计结构简单、轻巧、使用方便,常用于金属冶炼、玻璃熔融、热处理等工艺过程中,实施非接触式温度测量。缺点是测量靠人眼比较,容易引入主观误差;价格较高。 (6)辐射高温计辐射高温计主要用于热电偶无法测量的超高温场合。优点是高温测量;响应速度快;非接触式测量;价格适中。缺点是非线性刻度;被测对象的辐射率、辐射通道中间介质的吸收率会对测量造成影响;结构复杂。(7)红外测温仪(便携式)特点是非接触测温;测温范围宽(600~1800℃ /900~2500℃);精度高示值的1%+1℃;性能稳定;响应时间快(0.7s);工作距离大于0.5m。
《控制工程》 课程设计论文 论文题目: 基于组态王的智能家居温湿度控制 学院计算机与信息科学学院、软件学院 专业自动化 年级 2012 级 学生姓名苏雷 学号 222012321042083 指导教师张渝 日期 2015-08-03
目录 摘要 (4) 1. 项目概述 (3) 1.1课程设计题目 (3) 基于组态王的智能家居温湿度控制。 (3) 1.2 项目背景 (3) 1.3 设计目的 (4) 1.4 功能 (4) 2. 项目实施方案 (4) 2.1 设计方案及程序流程 (4) 2.1.1设计方案 (4) 2.1.2 人员分工及进度安排 (5) 3. 项目实施过程 (6) 3.1 设计图 (6) 3.2 元器件说明 (7) (2)RS485温湿度传感器说明书 (9) 通讯协议 (11) 3.3 编码过程 (11) 3.4 制作过程 (12) 4. 项目成果 (15) 4.1实物照片 (15) 4.2 测试结果 (17) 5. 总结 (18) 5.1收获 (18) 5.2 难点、创新点 (18) 5.3 不足、改进措施 (19)
基于组态王的智能家居温湿度控制 苏雷 西南大学计算机与信息科学学院,重庆 400715 摘要本系统设计通过温湿度传感器采集信号,经MODBUS扩展模块传输信号到485-232转串口把信号传递到计算机上,计算机在组态王软件的协助下对温湿度分析比较设置读取温湿度变化,获得温湿度动态曲线,设置参数报表等。输入额定温湿度之后,按语言命令编程的要求发出警报同时发送信号到MODBUS模块的继电器模块,使连接继电器的风扇接受指令转动或者停止,从而达到对室内温湿度的智能控制。这是智能家居的初步设定,如果有其他传感器也可以连接到计算机上控制的内容可以更多,市场开发前景也很好。 关键词:温湿度传感器;组态王软件;风扇控制;串口通信。 1. 项目概述 1.1课程设计题目 基于组态王的智能家居温湿度控制。 1.2 项目背景 温湿度传感器的特点是感应读取外界温湿度,当接收到信号时通过发送IO 离散信号到计算机,通过相应软件读取温湿度,如果想对温湿度进行控制就需要外加电风扇或者加湿器等其它的器材,我们这里只有风扇,所以只对风扇进行控制,实际操作中可以控制多个继电器对其他改变温室的的器具进行控制。如果额定值大于采集到的温室度则继电器工作风扇转动。这个系统可以用于室内智能温湿度控制,使温湿度保持在客户需要的值。也可用于工厂、仓库等对温湿度要求比较高的地方,运用前景很好。
三菱PLC和FX2N-4AD-TC实现温度PID闭环控制系统的学习参考。。。。。。
风机鼓入的新风经加热交换器、制冷交换器、进入房间。原理说明:进风不断被受热体加温,欲使进风维持一定的温度,这就需要同时有一加热器以不同加热量给进风加热,这样才能保证进风温度保持恒定。 plc接线图如下,按图接好线。配线时,应使用带屏蔽的补偿导线和模拟输入电缆配合,屏蔽一切可能产生的干扰。fx2n-4ad-tc的特殊功能模块编号为0。
输入和输出点分配表 这里介绍pid控制改变加热器(热盘管)的加热时间从而实现对温度的闭环控制。
在温度控制系统中,电加热器加热,温度用热电耦检测,与热电耦型温度传感器匹配的模拟量输入模块 fx2n-4ad-tc将温度转换为数字输出,cpu将检测的温度与温度设定值比较,通过plc的pid控制改变加热器的加热时间从而实现对温度的闭环控制。pid控制时和自动调谐时电加热器的动作情况如上图所示。其参数设定内容如下表所示。 三菱plc和fx2n-4ad-tc实现温度pid闭环控制系统程序设计:
用选择开关置x10作为自动调谐控制后的pid控制,用选择开关置x11作为无自动调谐的pid控制。 当选择开关置x10时,控制用参数的设定值在pid运算前必须预先通过指令写入,见图程序0步开始,m8002为初始化脉冲,用mov指令将目标值、输入滤波常数、微分增益、输出值上限、输出值下限的设定值分别传送给数据寄存器d500、d512、d515、d532、d533。 程序第26步,使m0得电,使用自动调谐功能是为了得到最佳pid控制,自动调谐不能自动设定的参数必须通过指令设定,在第29步~47步之间用mov指令将自动调谐用的参数(自动调谐采用时间、动作方向自动调谐开始、自动调谐用输出值)分别传送给数据寄存器d510、d511、d502。 程序第53步开始,对fx2n-4ad-tc进行确认、模式设定,且在plc运行中读取来自fx2n-4ad-tc的数据送到plc的d501中,103步开始对pid动作进行初始化。 第116步开始,x10闭合,在自动调谐后实行pid控制,当自动调谐开始时的测定值达到目标值的变化量变化1/3以上,则自动调谐结束,程序第128步~140步,自动调谐
基于P I D法温度控制Revised on November 25, 2020
制器会发出信号停止加热。但这时发热棒或发热圈的内部温度会高于400℃,发热棒、发热圈还将会对被加热的器件进行加热,即使温度控制器发出信号停止加热,被加热器件的温度还往往继续上升几度,然后才开始下降。当下降到设定温度的下限时,温度控制器又开始发出加热的信号,开始加热,但发热丝要把温度传递到被加热器件需要一定的时候,这就要视乎发热丝与被加热器件之间的介质情况而定。通常开始重新加热时,温度继续下降几度。所以,传统的定点开关控制温度会有正负误差几度的现象,但这不是温度控制器本身的问题,而是整个热系统的结构性问题,使温度控制器控温产生一种惯性温度误差。 2、PID控制解决 要解决温度控制器这个问题,采用PID控制技术,是明智的选择。PID控制,是针对以上的情况而制定的、新的温度控制方案,用先进的数码技术通过Pvar、Ivar、Dvar三方面的结合调整,形成一个模糊控制,来解决惯性温度误差问题。然而,在很多情况下,由于传统的温度控制器温控方式存在较大的惯性温度误差,往往在要求精确的温控时,很多人会放弃自动控制而采用调压器来代替温度控制器。但是用调压器来代替温度控制器时,必须在很大程度上靠人力调节,随着工作环境的变化而用人手调好所需温度的度数,然后靠相对稳定的电压来通电加热,勉强运作,但这决不是自动控温。当需要控温的关键很多时,就会手忙脚乱。这样,调压器就派不上用场,因为靠人手不能同时调节那么多需要温控的关键,只有
采用PID 模糊控制技术,才能解决这个问题,使操作得心应手,运行畅顺。 二、该温控系统的结构和原理: 1、系统的结构: 系统功能主要实现断水保护和高水位指示、自动保温、自动报警及高温保护功能。用双排数码管分别显示设计与测量温度,保温时间,加热周期及PID 的各参数,当测量温度达保温温度时,数码管显示设定温度。当达设定温度时,数码管应该切换到设定的保温时间,并倒计时。 控制结构图: 2、系统原理: 1)、温度采样及转化 温度传感器t P 100铂热电阻在0~850°C 间,其电阻t R 和温度T 的关系为: 0R :0o C 时的电阻值,为100Ω A=×1310--C o B=×2710--C o 由于电阻Rt 和温度T 之间的关系是非线性的,因此在设计变送器时必须进行线性校正,本系统采用三线制铂热电阻测温电桥电路。输出电压U 。与电阻Rt 之间成近似线性关系。在控制精度范围内有效解决非线性问题。
摘要:过热温度是各种工业锅炉设备的重要参数。如果过热蒸汽温度过高,则过热器容易损坏,也会使汽轮机内部引起过度的热膨胀严重影响生产运行的安全;过热蒸汽温度偏低,则设备的效率将会降低,同时使通过汽轮机最后几级的蒸汽湿度增加,引起叶片的磨损。因此,必须控制过热器出口蒸汽温度。锅炉过热蒸汽温度的控制任务,就是为了维持过热器出口蒸汽温度在允许的范围内,并保护过热器管壁温度不超过允许的工作温度。 本课题利用智能仪表控制系统,结合组态王监控软件设计人机对话界面,实现锅炉过热蒸汽控制系统设计。通过对现场系统数据的采集处理,在组态王中实现动画显示、报警处理、流程控制、实时曲线和报表输出等功能。同时利用智能仪表控制系统,在所设计的组态王监控界面中,进行相关仪表调校和控制器参数整定。最后向用户提供锅炉过热蒸汽控制系统的动态运行结果。 关键词:过热蒸汽温度;智能仪表;组态王 Abstract:Superheated steam temperature is a variety of important industrial boiler equipment parameters, in the production process, the entire path of soft drink is the highest temperature of superheated steam temperature, superheater temperature normal working hours, there are generally closer to the material to allow the maximum temperature, if overheating steam temperature too high, easy to damage superheater and steam turbine will cause excessive internal seriously affected the production of thermal expansion of the safety of operation; superheated steam temperature is low, it will reduce the efficiency of equipment, while the adoption of the final class of steam turbine steam humidity increased, the wear and tear caused by the leaves. Therefore, we must control the export steam superheater temperature. Overheated steam boiler control is tantamount to the task, that is, in order to maintain the export steam superheater temperature in the permit, and to protect the superheater tube wall temperature does not exceed allowable operating temperature. The subject control system using smart meters, combined with monitoring software Kingview dialogue man-machine interface design, the realization of superheated steam boiler control system design. Through on-site data acquisition and processing system, in achieving kingview animation, alarm processing, process control, real-time curves and the functions of the output statements. At the same time, the use of intelligent instrument control system, designed in Kingview monitoring interface, the associated instrumentation and controls to adjust the setting parameters. Finally, to provide users
温度控制与PID算法 温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。 1.温度控制的框图 这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。其调节过程如下:
温度控制的功率输出采用脉宽调制的方法。固态继电器SSR的输出端为脉宽可调的电压U OUT 。当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN 其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。 2.温度控制的两个阶段 温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。这给温度的控制带来了困难。因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。为了合理地处理系统响应速度(即加热速度)与系统稳定性之间地矛盾,我们把温度控制分为两个阶段。
鸡舍内对于温度和湿度协调控制方法 一、鸡舍内对于温度和通风的协调控制方法 鸡舍是一个封闭的空间,养殖户要保证养鸡的产值和收益,每个鸡舍的养殖密度都相对较大,在这样大密度的养殖空间中,养殖户必须得把控好温度和通风的状态,只有适宜的通风状态和温度才能确保鸡的安全成长。 随着鸡龄的增加,鸡舍的温度也应随之改变。0周龄~6周龄的雏鸡,应将鸡舍内的温度控制在18℃~25℃。其中在育雏的第一天应将鸡舍内的温度控制在33℃~35℃,接下来每周下降2℃~3℃,到18℃~25℃即可。鸡开始产蛋的时候,鸡舍内的温度适宜在15℃~24℃,产蛋期间鸡舍的温度不能低于5℃,不要超过30℃。 鸡舍养殖期间忌讳出现忽冷忽热情况,忽冷忽热极易造成冷热应激现象,进而导致免疫或用药失败。由此可见,鸡舍内温度的控制也是另一个养鸡的关键因素,常用的鸡舍温度控制方式有自然调控和鸡舍温湿度监控系统调控。自然调控鸡舍温度是利用白天的太阳光来使鸡舍内的温度升高,夜间利用墙体与垫料的储热功能来保持稳定的温度变化。建大仁科鸡舍温湿度监控系统调控鸡舍温度是利用温湿度传感器系统来监测和控制温度,通常通过控制湿帘、空调、加热器等来调节温度,使温度处于恒定变化。 夏季的天气较为炎热,尤其是当空气温度在30℃以上时,会使鸡群感到不适,这样可能导致其生长发育不良与产蛋能力下降等。因此,适量的通入凉风能够在降低环境温度的同时舒缓鸡群的心情,使其正常生长。 鸡舍内的空气质量取决于养殖户对于鸡舍通风的控制,空气质量直接影响鸡的健康。我们都知道,流感等疾病多数是通过空气进行传播,所以,在进行换气处理的时候对于进入鸡舍的空气要做一些相应的净化与灭菌消毒处理,对于进入的气体要除去尘埃。 特别说明的是,在鸡舍的设计中就应该做到通风口的设计,在建设中就将通风设备进行安装和调试,并且做好对风扇的频率控制,在计算鸡舍面积和鸡的总数之后确定安装的风扇个数和风
锅炉温度控制系统上位机设计 1. 设计背景 锅炉是化工、炼油、发电等工业生产过程中必不可少的重要的动力设备。它所产生的高压蒸汽,既可以作为风机、压缩机、大型泵类的驱动透平的动力源,又可作为蒸馏、化学反应、干燥和蒸发等过程的热源。随着工业生产规模的不断扩大,生产设备的不断创新,作为全厂动力和热源的锅炉,办向着大容量、高参数、高效率发展。为了确保安全,稳定生产,锅炉设备的控制系统就显得愈加重要。随着经济的迅猛发展,自动化控制水平越来越高,用户对锅炉控制系统的工作效率要求也越来越高,为了提高锅炉的工作效率,较少对环境的污染问题,所以利用计算机与组态软件技术对锅炉生产过程进行自动控制有着重要的意义。 2.任务要求 (1) 按照题目设计监控画面及动态模拟; (2) 在数据字典中定义需要的内存变量和I/O变量; (3) 实现监控系统的实时、历史曲线及报警界面显示; (4) 实现保存数据和参数报表打印功能; (5) 实现登陆界面和帮助界面。 3. 界面功能 3.1 系统说明 本系统的目的是实现锅炉的温度控制,所以在监控界面设置了加热部分和降温部分,同时通过观察相应仪表,操作者手动的实现对锅炉温度的控制,而且在加热过程和降温过程中有信号灯可以清楚地显示系统工作在什么阶段。此外,在监控界面加入了液位控制部分,通过对进水量和出水量的控制实现液位平衡。实时曲线和历史曲线可以让操作者清楚地观察到锅炉内液体的液位高度和温度,从而更加准确的操作系统,达到控制要求。实时报警界面可以随时进行提醒,防止发生意外情况。帮助界面可以让初次登陆该系统的用户快速学会如何操作系统。登陆界面中加入用户登陆部分,只有有相应权限的操作者也可以控制系统。该系统还加入历史曲线打印功能和对系统相关变量的保存功能,用户可以随时查看历史记录。 3.2主监控界面 主控界面实现的是操作者观察仪表,得到锅炉内液体温度和液位的实时信息,通过调节电磁阀1、2,使得锅炉内液体液位保持在要求范围内,通过加热按钮和降温按钮对温度进行控制,使得温度在要求范围内。这样,就实现了锅炉温度的控制。在该界面加入菜单项,可以查看历史系统报警。加入实时曲线、历史曲线和帮助界面按钮,可以使操作者更加快捷、准确的实现对系统的控制。如图1所示:
DS18B20智能温度控制器 DALLAS最新单线数字温度传感器DS18B20简介新的“一线器件”体积更小、适用电压更宽、更经济Dallas 半导体公司的数字化温度传感器DS1820是世界上第一片支持“一线总线”接口的温度传感器。一线总线独特而且经济的特点,使用户可轻松地组建传感器网络,为测量系统的构建引入全新概念。DS18B20、DS1822 “一线总线”数字化温度传感器同DS1820一样,DS18B20也支持“一线总线”接口,测量温度范围为-55°C~+125°C,在-10~+85°C范围内,精度为±0.5°C。DS1822的精度较差为±2°C 。现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性。适合于恶劣环境的现场温度测量,如:环境控制、设备或过程控制、测温类消费电子产品等。与前一代产品不同,新的产品支持3V~5.5V的电压范围,使系统设计更灵活、方便。而且新一代产品更便宜,体积更小。DS18B20、DS1822 的特性DS18B20可以程序设定9~12位的分辨率,精度为±0.5°C。可选更小的封装方式,更宽的电压适用范围。分辨率设定,及用户设定的报警温度存储在EEPROM中,掉电后依然保存。DS18B20的性能是新一代产品中最好的!性能价格比也非常出色!DS1822与DS18B20软件兼容,是DS18B20的简化版本。省略了存储用户定义报警温度、分辨率参数的EEPROM,精度降低为±2°C,适用于对性能要求不高,成本控制严格的应用,是经济型产品。继“一线总线”的早期产品后,DS1820开辟了温度传感器技术的新概念。DS18B20和DS1822使电压、特性及封装有更多的选择,让我们可以构建适合自己的经济的测温系统。 DS18B20的内部结构 DS18B20内部结构主要由四部分组成:64位光刻ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。DS18B20的管脚排列如下: DQ为数字信号输入/输出端;GND为电源地;VDD为外接供电电源输入端(在寄生电源接线方式时接地)。 光刻ROM中的64位序列号是出厂前被光刻好的,它可以看作是该DS18B20的地址序列码。64位光刻ROM的排列是:开始8位(28H)是产品类型标号,接着的48位是该DS18B20自身的序列号,最后8位是前面56位的循环冗余校验码(CRC=X8+X5+X4+1)。光刻ROM 的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20的目的。 DS18B20中的温度传感器可完成对温度的测量,以12位转化为例:用16位符号扩展的二进制补码读数形式提供,以0.0625℃/LSB形式表达,其中S为符号位。 这是12位转化后得到的12位数据,存储在18B20的两个8比特的RAM中,二进制中的前面5位是符号位,如果测得的温度大于0,这5位为0,只要将测到的数值乘于0.0625即可得到实际温度;如果温度小于0,这5位为1,测到的数值需要取反加1再乘于0.0625即可得到实际温度。
常用温度传感器的对比分析及选择 大致的要点: 1.温度传感器概述:应用领域,重要性; 2.四种主要的温度传感器类型的横向比较 3.热电偶传感器 4.热电阻传感器 5.热敏电阻传感器 6.集成电路温度传感器以及典型产品举例 7.温度传感器的正确选择及应用 在各种各样的测量技术中,温度的测量可能是最为常见的一种,因为任何的应用领域,掌握温度的确切数值,了解温度与实际状态之间的差异等,都具有极为重要的意义。就以测量为例,在力的测量,压力,流量,位置及电平高低等测量的过程中,为了提高测量精度,通常都会要求对温度进行监视,如压力或力的测量,往往是使用惠斯登电阻电桥,但组成电桥的电阻随温度变化引起的误差,往往会大大超过待测力引起的电阻值变化,如不对温度进行监控并据此校正测量结果,则测量完全不可能进行或者毫无效果。其他参数测量也有类似问题,可以说,各种的物理量都是温度的函数,要得到精确的测定结果,必须针对温度的变化,作出精确的校正。本文就是帮助读者针对特定的用途,选择最为合适的温度传感器,并进行精确的温度测量。 工业上常用的温度传感器有四类:即热电偶、热电阻RTD、热敏电阻及集成电路温度传感器;每一类温度传感器有自己独特的温度测量范围,有自己适用的温度环境;没有一种温度传感器可以通用于所有的用途:热电偶的可测温度范围最宽,而热电阻的测量线性度最优,热敏电阻的测量精度最高。表1是四类传感器的各自独特的性能特性及相互比较。表2是四类传感器的典型应用领域。
热电偶--通用而经济 热电偶由二根不同的金属线材,将它们一端焊接在一起构成,如图1所示;参考端温度(也称冷补偿端)用来消除铁-铜相联及康铜-铜联接端所贡献的误差;而两种不同金属的焊接端放置于需要测量温度的目标上。 两种材料这样联接后会在未焊接的一端产生一个电压,电压数值是所有联接端温度的函数,热电偶无需电压或电流激励。实际应用时,如果试图提供电压或电流激励反而会将误差引进系统。 鉴于热电偶的电压产生于两种不同线材的开路端,其与外界的接口似乎可通过直接测量两导线之间的电压实现;如果热电偶的的两端头不是联接至另外金属,通常是铜,那末事情真会简单至此。 但热电偶需与另外一种金属联接这一事实,实际上又建立了新的一对热电偶,在系统中引入了极大的误差,消除此误差的唯一办法是检测参考端的温度(参见图1),以硬件或硬件-软件相结合的方式将这一联接所贡献的误差减掉,纯硬件消除技术由于线性化校正的因素,比软件-硬件相结合技术受限制更大。一般情况下,参考端温度的精确检测用热电阻RTD,热敏电阻或是集成电路温度传感器进行。原则上说,热电偶可由任意的两种不同金属构建而成,但在实践中,构成热电偶的两种金属组合已经标准化,因为标准组合的线性度及所产生的电压与温度的关系更趋理想。 表3与图2是常用的热电偶E,J,T,K,N,S,B R的特性。
温度的PID 控制 一.温度检测部分首先要OK. 二、PID 调节作用 PID 控制时域的公式 ))()(1)(()(?++ =dt t de Td t e Ti t e Kp t y 分解开来: (1) 比例调节器 y(t) = Kp * e(t) e(k) 为当前的温差(设定值与检测值的插值) y(k) 为当前输出的控制信号(需要转化为PWM 形式) # 输出与输入偏差成正比。只要偏差出现,就能及时地产生与之成比例的调节 作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。但是, Kp 过大会导致动态品质变坏,甚至使系统不稳定。比例调节器的特性曲线. (2) 积分调节器 y(t) = Ki * ∫(e(t))dt Ki = Kp/Ti Ti 为积分时间 #TI 是积分时间常数,它表示积分速度的大小,Ti 越大,积分速度越慢,积分作用越弱。只要偏差不为零就会产生对应的控制量并依此影响被控量。增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。 (3) 微分调节器 y(t) = Kd*d(e(t))/dt Kd = Kp*Td Td 为微分时间 #微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。偏差变化越快,则产生的阻止作用越大。从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。 三.PID 算法: 由时域的公式离散化后可得如下公式:
y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2) y(k) 为当前输出的控制信号(需要转化为PWM形式) y(k-1)为前一次输出的控制信号 e(k) 为当前的温差(设定值与检测值的插值) e(k-1) 为一次前的温差 e(k-2) 为二次前的温差 Kp 为比例系数 Ki = Kp*T/Ti T为采样周期 Kd = Kp*Td/T 四.PID参数整定(确定Kp,Ts,Ti,Td): 温度控制适合衰减曲线法,需要根据多次采样的数据画出响应曲线。 所以需要通过串口将采样时间t, 输出y(t)记录下来,方便分析。 1)、不加入算法,系统全速加热,从常温加热到较高的温度的时间为Tk, 则采样时间一般设为 T = Tk/10。 2)、置调节器积分时间TI=∞,微分时间TD=0,即只加比例算法: y(k) = y(k-1)+Kp*e(k) 比例带δ置于较大的值。将系统投入运行。(δ = 1/Kp) 3)、待系统工作稳定后,对设定值作阶跃扰动,然后观察系统的响应。若响应振荡衰减太快,就减小比例带;反之,则增大比例带。如此反复,直到出现如图所示的衰减比为4:1的振荡过程时,记录此时的δ值(设为δS),以及TS 的值(如图中所示)。当采用衰减比为10:1振荡过程时,应用上升时间Tr替代 振荡周期TS计算。 系统衰减振荡曲线 图中,TS为衰减振荡周期,Tr为响应上升时间。 据表中所给的经验公式计算δ、TI及TD的参数。
本技术新型公开了一种温度控制结构,包括一个具有安装腔的导热壳体、固定设置在安装腔内的支架、温控元件以及热敏电阻元件,所述支架上设置有热敏电阻安装槽和温控器安装槽,所述温控元件包括温控器和温控器导线,所述热敏电阻元件包括热敏电阻和电阻导线,所述热敏电阻和温控器对应安装在热敏电阻安装槽和温控器安装槽中,所述支架上设置有一个的引脚,引脚通过插接端子与一根接地线连接。与现有技术相比,该温度控制结构在不影响产品性能的情况下,结构更简单、可靠,工作人员可以快速完成接地线与支架的连接,简 化装配工序,提高生产效率。
权利要求书 1.一种温度控制结构,其特征在于,包括一个具有安装腔的导热壳体、固定设置在安装腔内的支架、温控元件以及热敏电阻元件,所述支架上设置有热敏电阻安装槽和温控器安装槽,所述温控元件包括温控器和温控器导线,所述热敏电阻元件包括热敏电阻和电阻导线,所述热敏电阻和温控器对应安装在热敏电阻安装槽和温控器安装槽中,所述支架上设置有一个的引脚,引脚通过插接端子与一根接地线连接。 2.根据权利要求1所述的温度控制结构,其特征在于,所述支架包括具有缺口的圆盘部和设置在该缺口上的折弯部,所述圆盘部的边缘设有向上翻折的翻边,所述圆盘部的底面上开设有与温控器相适配的温控器安装槽,所述折弯部折弯形成所述热敏电阻安装槽。 3.根据权利要求2所述的温度控制结构,其特征在于,所述引脚为一块竖直朝下设置在圆盘部底部的导电插片;所述接地线与插接端子连接的一端设置有导电插条,所述插接端子的一端与导电插片连接,另一端与导电插条连接。 4.根据权利要求3所述的温度控制结构,其特征在于,所述插接端子包括相互连接的第一安装部和第二安装部,第一安装部包括底片和两片设置在底片的左右两侧且向内翻折的弧边,所述弧边用于将导电插片抵压在底片上,所述第二安装部为插座,所述插座上设有用于插接导电插条的插槽。 5.根据权利要求1所述的温度控制结构,其特征在于,所述热敏电阻两端的引脚设置折弯形成U字型,所述电阻导线的一端与热敏电阻的引脚连接,另一端通过第一连接端子与微电 脑控制面板连接。 6.根据权利要求5所述的温度控制结构,其特征在于,所述热敏电阻的外部套设有绝缘套管。 7.根据权利要求1所述的温度控制结构,其特征在于,所述温控器的底部设置有两个插脚,两个插脚分别通过第二接线端子与一根温控器导线连接。
前言 可编程控制器是一种应用很广泛的自动控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,具有控制能力强、操作灵活方便、可靠性高、适宜长期连续工作的特点,非常适合温度控制的要求。 在工业领域,随着自动化程度的迅速提高,用户对控制系统的过程监控要求越来越高,人机界面的出现正好满足了用户这一需求。人机界面可以对控制系统进行全面监控,包括过程监测、报警提示、数据记录等功能,从而使控制系统变得操作人性化、过程可视化,在自动控制领域的作用日益显著。 本文主要介绍了基于三菱公司FX2N系列的可编程控制器和亚控公司的组态软件组态王的某一对象温度控制系统的设计方案。编程时调用了编程软件STEP 7 -Micro WIN中自带的PID控制模块,使得程序更为简洁,运行速度更为理想。利用组态软件组态王设计人机界面,实现控制系统的实时监控、数据的实时采样与处理。 目录 第一章概述 (2) 第二章总方案 (3) 2.1 系统框图 (3) 2.2 下位机设计 (4) 2.2.1 元件选择 (6) 2.3 上位机设计 (8) 2.3.1 监控主界面 (9) 2.3.2 实时趋势曲线 (10) 2.3.3 历史趋势曲线 (11) 2.3.4 报警窗口 (11) 2.3.5 设定画面 (12) 2.3.6 变量设置 (13) 2.3.7 动画连接 (15) 第三章总结 (17) 第四章参考文献 (17) 1 第一章概述 温度控制在电子、冶金、机械等工业领域应用非常广泛。由于其具有工况复杂、参数多变、运行惯性大、控制滞后等特点,它对控制调节器要求极高。目前,仍有相当部分工业企业在用窑、炉等烘干生产线,存在着控制精度不高、炉内温度均
温度PID 控制实验 一、实验目的 1.加深对PID 控制理论的理解; 2.认识Labview 虚拟仪器在测控电路的应用; 3.掌握时间比例P、积分I、微分D 对测控过程连续测控的影响以及提高测控系统的精度; 4.通过实验,改变P、I、D 参数,观察对整个温度测控系统的影响; 5.认识固态继电器和温度变送器,了解其工作原理。 二、预习要点 1.PID 控制理论与传递函数。请学生在0-100 的范围里,自己选择较好的KP,KI,KD 值,用该控制参数进行后续实验; 2.了解A/D、D/A 转换原理; 3.Labview 虚拟仪器图形软件(本实验指导书附录中对使用环境详细介绍)。 三、实验原理 温度是通过固态继电器的导通关断来实现加热的,控制周期即是一个加热和 冷却周期,PID 调节的实现也是通过这个周期实现的,在远离温度预设值的时固 态继电器在温度控制周期中持续加热(假设导通时间是T),在接近温度预设值 时通过PID 得到的值来控制这一周期内固态继电器的开关时间(假设导通时间是 1/2T)维持温度(假设导通时间是1/4T)。如图1 所示: 图1 加热周期控制示意图 8 四、实验项目 1.用PID 控制水箱温度; 2.用控制效果对比完成数据对比操作,选出最佳值。 五、实验仪器 ZCK-II 型智能化测控系统。 六、实验步骤及操作说明 1.打开仪器面板上的总电源开关,绿色指示灯亮起表示系统正常;
2.打开仪器面板上的液位电源开关,绿色指示灯亮起表示系统正常; 3,确保贮水箱内有足够的水,参照图2 中阀门位置设置阀门开关,将阀门1、3、5、6 打开,阀门2、4 关闭; 图2 水箱及管道系统图 4.参看变频器操作说明书将其设置在手动操作挡; 5.单击控制器RUN 按钮,向加热水箱注水,直到水位接近加热水箱顶部,完 全 淹没加热器后单击STOP 按钮结束注水; 6.关闭仪器面板上的液位电源开关,红色指示灯亮起表示系统关闭; 7.打开仪器面板上的加热电源开关,绿色指示灯亮起表示系统正常; 8.打开计算机,启动ZCK-II 型智能化测控系统主程序; 9.用鼠标单击温度控制动画图形进入温度控制系统主界面,小组实验无须在个 人信息输入框填写身份,直接确定即可; 10.在温度系统控制主界面中,单击采集卡测试图标,进入数据采集卡测试程序。 请在该选项中确定选择设备号为端口1,因为我们接入数据采集卡的端口是1 号 9 端口,其他数据端口留做其他方面使用的,所以切记不能选错,否则程序会报 错 并强制关闭。选择采集通道时请选择0 号通道即温度传感器占用的通道。控制上、 下限选项是为设置报警电路所预设的,在本实验中暂未起用该功能,感兴趣的 同 学可以试着完善它,本实验报警数值是+1V 以下和+5V 以上,这里只做了解即可。 采样点数(单位:个)、采样速率(单位:个/秒)和控制周期(单位:毫秒) 请 参照帮助显示区进行操作,一切设置确认无误后即可单击启动程序图标,观察 温 度和电压的变化,也可以单击冷却中左边的开关按钮进入加热程序,观察温度 上 升曲线及电流表和电压表变化,确认传感器正常工作后点击程序结束,等待返 回 主界面图标出现即可返回温度控制主界面进入下一步实验。 11.在温度系统控制主界面中,单击传感器标定图标,进入传感器标定程序。 本 程序界面和数据采集卡测试程序界面基本相同,操作请参照步骤10 进行,一切 设置确认无误后即可单击启动程序图标,观察温度和电压的变化,同时用温度
1 引言 科学技术离不开测量。测量的目的就是要获得被测对象的有关物理或化学性质的信息,以便根据这些信息对被测对象进行评价或控制,完成这一功能的器件就我们称之为传感器。传感器是信息技术的前沿尖端产品,被广泛用于工农业生产、科学研究和生等领域,尤其是温度传感器,使用范围广,数量多,居各种传感器之首。温度传感器的发展大致经历了以下3个阶段; (1) 传统的分立式温度传感器(含敏感元件);主要是能够进行非电量和电量之间转换。 (2) 模拟集成温度传感器/控制器; (3) 智能温度传感器。目前,国际上新型温度传感器正从模拟式向数字式、由集成化向智能化、网络化的方向发展。 2 传感器的分类 传感器分类方法很多,常用的有2种:一种是按被测的参数分,另一种是按变换原理来分。通常按被测的参数来分类,可分为热工参数:温度、比热、压力、流量、液位等;机械量参数:位移、力、加速度、重量等;物性参数:比重、浓度、算监度等;状态量参数:颜色、裂纹、磨损等。温度传感器属于热工参数。 温度传感器按传感器于被测介质的接触方式可分为2大类:一类是接触式温度传感器,一类是非接触式温度传感器,接触式温度传感器的测温元件与被测对象要有良好的热接触,通过热传导及对流原理达到热平衡,这时的示值即为被测对象的温度。这种测温方法精度比较高,并在一定程度上还可测量物体内部的温度分布,但对于运动的、热容量比较小的、或对感温元件有腐蚀作用的对象,这种方法将会产生很大的误差。非接触测温的测温元件与被测对象互不接触。目前最常用的是辐射热交换原理。此种测温方法的主要特点是可测量运动状态的小目标及热容量小或变化迅速的对象,也可测温度场的温度分布,但受环境的影响比较大。 3 传感器的原理及发展 3.1 传统的分立式温度传感器—热电偶传感器 热电偶传感器是工业测量中应用最广泛的一种温度传感器,它与被测对象直接接触,不受中间介质的影响,具有较高的精确度;测量范围广,可从-50℃-1600℃进行连续测量,特殊的热电偶如金铁-镍铬,最低可测到-269℃,钨-铼最高可达2800℃。 热电偶传感器主要按照热电效应来工作。将两种不同的导体A和B 连接起来,组成一个闭合回路,即构成感温元件,如图1所示。当导体A和B的两个接点1和2之间存在温差时,两者之间便产生电动势,因而在回路中形成一定大小的电流,这种现象即称为热电效应,也叫温差电效应。热电偶就是利用这一效应进行工作的。热电偶的一端是将A、B两种导体焊接在一起,称为工作端,置于温度为t的被测介质中。另一端称为参比端或自由端,放于温度为t0的恒定温度下。当工作端的被测介质温度发生变化时,热电势随之发生变化,将热电势送入计算机进行处理,即可得到温度值。 热电偶两端的热电势差可以用下式表示: Et=E(t)-E(t0) 式中:Et—热电偶的热电势 E(t)—温度为t时的热电势