步进电机的驱动控制(环行分配器)
步进电机的转动是靠不停地改变各相绕组的通电顺序实现的,若想让某相绕组通电,就要给某相绕组提供一组序列脉冲,因此步进电机有几相,就要为其提供几个脉冲序列。
步进电机需要的脉冲序列来自插补器,但对于某个单轴坐标,插补器只能按照一定线型,提供一个单序列脉冲。因此,在插补器到步进电机之间必须有一个能将插补器的单序列脉冲转换为步进电机需要的多序列脉冲的装置,这就是环行分配器。
尽管有了环行分配器就可以将插补器的单序列脉冲转换为步进电机需要的多序列脉冲,但这些序列脉冲的信号都还不足以驱动电机运转,所以驱动控制系统中还应包括功率放大装置。
步进电机的最基本的控制系统就由环行分配器和功率放大器组成。
下面只介绍环行分配器,功率放大器涉及许多电气控制问题,留待机电一体化课程介绍。
环行分配器可以由硬件构成也可以由软件构成,下面分别介绍两方面的内容。
硬件环行分配器构成
?环行分配器的工作原理
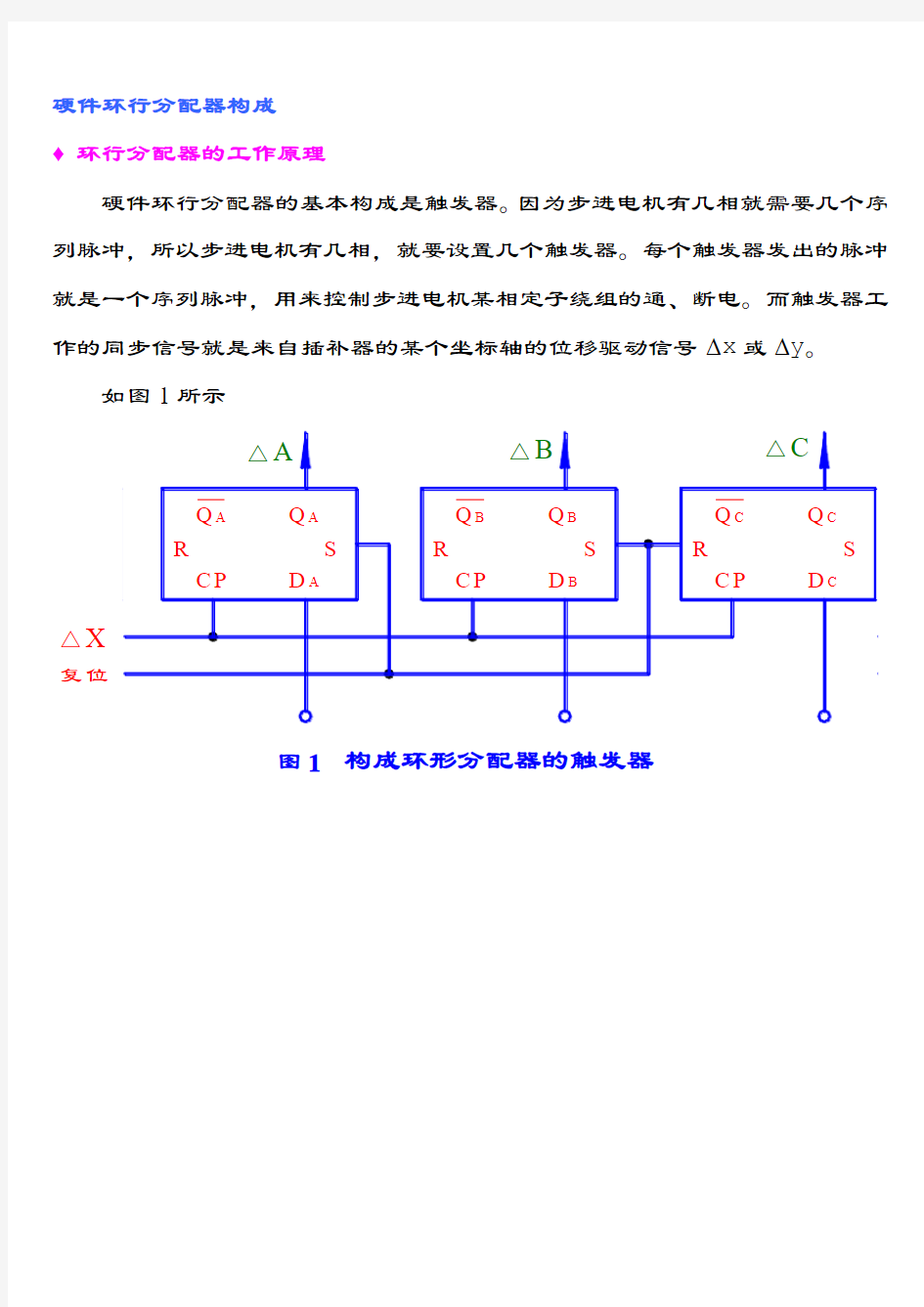
硬件环行分配器的基本构成是触发器。因为步进电机有几相就需要几个序列脉冲,所以步进电机有几相,就要设置几个触发器。每个触发器发出的脉冲就是一个序列脉冲,用来控制步进电机某相定子绕组的通、断电。而触发器工作的同步信号就是来自插补器的某个坐标轴的位移驱动信号Δx或Δy。
如图1所示
△X
复位
图1构成环形分配器的触发器
例如,现在要控制X方向的步进电机,而这个电机采用三相单三拍方式工作,即步进电机是按照A→B→C→A这种方式通电的。这就需要A、B、C 三个触发器,每个触发器的输出端QA、QB、QC都被连接到步进电机的一相定子绕组。当QA有输出ΔA,步进电机的A相就通电,同理,若QB有输出ΔB,就使步进电机的B相通电,或者QC有输出ΔC,就使步进电机的C相通电。你看,这时由触发器构成的环行分配器,其实就是一个三分频电路,而被分频的信号就是插补器的输出信号Δx。于是插补器的一路信号,就被扩展成三路信号。
每来三个Δx信号脉冲,QA、QB、QC就会各有一个输出脉冲ΔA、ΔB、ΔC,步进电机的三个定子绕组各得到一次通电,转子走了三步。如果继续得到脉冲,那么,QA、QB、QC也会继续轮流输出脉冲ΔA、ΔB、ΔC,这就实现了步进电机各相绕组A、B、C的轮流通电。
图2是按照三相单三拍方式的Δx和ΔA、ΔB、ΔC的波形图。
图3是按照三相双三拍方式的Δx和ΔA、ΔB、ΔC的波形图。
图4是按照三相六拍方式的Δx和ΔA、ΔB、ΔC的波形图。
2681
4537
9
△C
△B
△A
△
图2 三相单三拍环形分配器输出波形图
△C
1
2345678
9
△△B △
A
图3 三相双三拍环形分配器输出波形图
△△C
△B △A
图4 三相六拍环形分配器输出波形图
上面,其实只讲了触发器的输出,触发器是有输入端的,而且输入端要控制输出端。输入端的信号由谁来提供呢?是Δx吗?,不是,Δx只能做同步信号CP。因为它是要被分频的信号。
如果用D触发器,则触发器的输入端就是D端,它的信号也取自触发器本身,不过这中间还要加一定的外接无源电路。触发器的输出和输入通过一定的外电路连接在一起,构成一个封闭的整体环形电路,只要有Δx这个单序列脉冲它就能连续不断地输出ΔA、ΔB、ΔC,这就是我们把它称为环行分配器的道理。即环行就是触发器的输入由其输出连接,分配就是根据步进电机定子绕组的通电顺序要求对Δx的序列脉冲进行再分配。所以也常直接称其为脉冲分配器。
?环行分配器外电路设计
外电路设计就是设计触发器的输入端前的逻辑结构。其实质相当于:已知触发器的输出状态,求解在什么输入条件下才能得到这样的输出呢?我们就来解决这个问题。
外电路设计要满足两个要求
?所选触发器逻辑特性的要求(即触发器输入输出之间的逻辑关系)
?步进电机通电状态的要求(即触发器的输出)
●所选触发器逻辑特性的要求
若选择D触发器,则触发器的逻辑特性为:
Q n + 1 = D n
据此有
Q A n + 1 = D A n Q B n + 1 = D B n Q C n + 1 = D C n
●步进电机通电状态的要求
?满足三相双三拍通电状态时的环形分配器逻辑正转通电顺序:AB → BC → CA → AB
真值表:
反转通电顺序:AB → AC → CB → AB
真值表:
分析:(以正转真值表为例)
? 每个节拍内的Q 端输出状态,就是步进电机的通电状态,只不过在真值表中,要求通电的相就用1表示,不要求通电的相就用0表示, ? D 端的真值就是根据D 触发器的逻辑特性写出来的。 按照下面所说的做法可以快速写出D 端的真值: ? 只看Q A 和D A 这两列
? 将Q A 和D A 的逻辑关系Q A n + 1 = D A n 调个,写成 D A n = Q A n + 1 ? 将上述关系具体化为D A 1 = Q A 2 D A 2 = Q A 3 D A 3 = Q A 4
? 表达式中的上标就是节拍,所以就是将第2节拍中Q A 的内容0,填写到D A 那一列中的第1节拍那一栏里;以下类推,结果如表中箭头所示。 ? 仿此D A 的做法写出D B 、D C 的真值,它们分别根据Q B 、Q C 来写。 ? 现在来看看D A 这一列的真值,它和Q C 这一列的真值在每个节拍都一致,因此可以获得D A = Q C ,同理有D B = Q A ,D C = Q B
注:某一个触发器的输入端的信息是由三个触发器输出端的状态共同决定的,所以这一步就是要找出D A 与Q A 、Q B 、Q C 的关系;D B 与Q A 、Q B 、Q C 的关系以及D C 与Q A 、Q B 、Q C 的关系。
以D A 为例,按照正逻辑来描述D A 与Q A 、Q B 、Q C 的关系,应为: D A = )()(C B A C B Q Q Q Q Q QA ∧∧∨∧∧
这是一个三变量的逻辑表达式,化简这个表达式的通常做法是利用卡诺图,这里因为关系简单、明确,所以直接用看的方法给出了结论。
结论:
?只要三个触发器的D输入端在每个节拍都能满足:
D A = Q C、D B = Q A、D C = Q B
那么就能保证三个触发器的输出端Q的输出状态是AB → BC → CA → AB ?只要三个触发器的D输入端在每个节拍都能满足:
D A = Q B、D B = Q C、D C = Q A
那么就能保证三个触发器的输出端Q的输出状态是AB → BC → CA → AB
通常一个实际使用的环形分配器,能同时满足两类步进电机通电方式的需要,以便用户根据步距角的要求进行选择。因此,下面给出适应三相六拍通电方式的环形分配器逻辑。
? 满足三相六拍通电状态时的环形分配器逻辑 正转通电顺序:A →AB →B → BC →C → CA → A 真值表:
根据D 触发器的逻辑关系和通电方式要求,按照上面介绍的快速写D A 与Q A 、Q B 、Q C 的关系;D B 与Q A 、Q B 、Q C 的关系以及D C 与Q A 、Q B 、Q C 的关系的方法,有:
B A Q D =
C B Q
D = A C Q D = 结论:
? 只要三个触发器的D 输入端在每个节拍都能满足:
B A Q D =
C B Q
D = A C Q D =
那么就能保证三个触发器的输出端Q 的输出状态是 A →AB →B → BC →C → CA → A
反转通电顺序:A →AC →C → CB →B → BA → A 真值表:
从表中能直接得到:
C A Q
D = A B Q D = B C Q D = 结论:
? 只要三个触发器的D 输入端在每个节拍都能满足:
C A Q
D = A B Q D = B C Q D =
那么就能保证三个触发器的输出端Q 的输出状态是 A →AC →C → CB →B → BA → A
小结
? 为满足三相双三拍正转通电顺序:AB → BC → CA → AB 应有: D A = Q C 、D B = Q A 、D C = Q B
? 为满足三相双三拍反转通电顺序:AB → AC → CB → AB 应有: D A = Q B 、D B = Q C 、D C = Q A
? 为满足三相六拍正转通电顺序:A →AB →B → BC →C → CA → A 应有: B A Q D = C B Q D = A C Q D =
? 为满足三相六拍反转通电顺序:A →AC →C → CB →B → BA → A 应有: C A Q D = A B Q D = B C Q D =
因为环形分配器既有可能工作在三相双三拍方式,也有可能工作在三相六拍方式,且无论在哪种通电方式下,都得既满足正转又满足反转。那么对这三个触发器得输入端来说,上述关系都是并列的即是相或的关系。所以有: C B B C A Q Q Q Q D +++= A C C A B Q Q Q Q D +++= C A A B C Q Q Q Q D +++=
这组逻辑关系表达式仅仅是将三个触发器的输入端与输出端联系在一起,但究竟哪个反馈信号(指Q 信号)和哪种状态(指通电方式或方向)对应没有表示出来,这就容易造成混乱。所以必须外加指示信号。
令:1X 表示三相双三拍正转指示信号 1X 表示三相双三拍反转指示信号 2X 表示三相六拍正转指示信号 2X 表示三相六拍反转指示信号
于是有:
C B B C A Q X Q X Q X Q X
D ∧+∧+∧+∧=2211 A C C A B Q X Q X Q X Q X D ∧+∧+∧+∧=2211 C A A B C Q X Q X Q X Q X D ∧+∧+∧+∧=2211
利用这组逻辑关系式构成器件的缺点是与门和或门都存在电平漂移问题,所以实际结构常用与非门和或非门,这需要做些变换: C B B C A Q X Q X Q X Q X D ∧+∧+∧+∧=2211 C B B C Q X Q X Q X Q X ∧+∧+∧+∧=2211 C B B C Q X Q X Q X Q X ∧+∧∧∧+∧=2211
C B B C Q X Q X Q X Q X ∧∧∧∧∧∧∧=2211
同理: A C C A B Q X Q X Q X Q X D ∧∧∧∧∧∧∧=2211
C A A B C Q X Q X Q X Q X
D ∧∧∧∧∧∧∧=2211 ● 环行分配器电路原理图
最后的环形分配器外电路,即Q 端与D 端的连接电路是按照上面推导得到的各触发器D 端的输入逻辑构建的,它需要两层与非结构,底层为四组与非门,上层是将底层各输出再次进行相与。 实际环形分配器器件原理如图5所示 图中复位信号用于初始化,本例初始设为: Q A = Q B =1 Q C = 0
即按照三相双三拍设置为A 、B 两相通电。
Q C
Q B
Q B
Q C
Q A
Q C
Q C
Q A
Q B
Q A
Q A
Q B
X 1X 1X 2X 2
△X 复位
图5 硬件环形分配器电路原理图
软件环行分配器构成
?软件环形分配器的定义及其硬件支持
所谓软件软件环形分配器,是指实现步进电机通电方式和通电顺序改变的功能不是用专门的硬件电路来完成,而是用编程的方式,即以指令驱动的方式来完成的。
就和计算机软硬件相互依赖一样,软环配也离不开硬件的支持。
图6 就是软件环行分配器的硬件接口电路。
图6 软件环形分配器的硬件接口电路
这是一个用51单片机构成的微机数控系统的一部分结构。其中采用通用接口芯片8255的PA口作为步进电机的控制口。一台三相步进电机需要三个口位。每个口位连接步进电机的一相定子绕组,这些口位代替了硬件环形分配器的触发器。按照图示结构,PA0、PA1、PA2三个口位通过隔离放大电路后分别接到X向步进电机的A、B、C三相绕组,这样,只要能够通过软件设置使PA0、PA1、PA2 三个口位按步进电机的通电方式和方向的要求分别置1和清0,就相当于给A、B、C三相绕组通电或断电。
在这个微机控制系统中,不需要用专门电路把单序列脉冲转换为多序列脉冲,也不需要把相当于硬环配的触发器输出端Q A Q B Q C的PA0、PA1、PA2再送到什么输入端(这里的输入端是数据总线D),因此这个系统中没有硬件环形分配器。但如果步进电机也需要按照单三拍方式轮流通电,那么PA0、P A1、PA2也需要轮流置1并在需要断电时及时清0,这个使步进电机改变通电方式和方向的工作是用软件实现的,所以称之为软件环形分配器。
?软件环形分配器的控制表
实现软件环形分配器的关键是要设计一个控制表。在这个控制表里要存放步进电机定子绕组通电状态字和状态字的存放单元。状态字的存放单元被称做地址指针。状态字是一个用二进制表示的数据,这个数据是按照接口电路中各个口位所对应的每个节拍中的各相绕组的通电状态,1代表通电,0代表断电得来的。如下表
?这是按照X向电机取三相六拍方式正向通电顺序节拍情况下接口各口位与绕组各相通电状态对照表。
?按照下述方法来理解这张表
横向看第1节拍:A相通电,X A =1 PA0 = 1
此时在整个PA口得到一个数据:PA = 00000001B = 01H
横向看第2节拍:A相通电,X A =1 PA0 = 1
B相通电,X B =1 PA1 = 1
此时在整个PA口得到的数据:PA = 00000011B = 03H
?按照上述方法对应每个节拍在PA口上,都能得到一个数据,这个数据就是步进电机通电状态控制字。
本表中对应各节拍的控制字是:
1节拍:PA = 01H 2节拍:PA = 03H 3节拍:PA = 02H
4节拍:PA = 06H 5节拍:PA = 04H 6节拍:PA = 05H
?表中虽然列出了Y向电机的各相绕组名称,但并没有写出它在各节拍的通电情况,为什么?清你思考。可以给你一个提示,这是针对逐点比较法插补思路考虑制定的控制字表结构,若按照数字积分法,这样设计表就不合适了。
得到控制字后就要把它送到存储单元中保存。这些控制字在微机数控系统中是重要的数据,必须考虑即使掉电数据也不能丢失,所以,这个控制字要存放在EPROM中。而对于用8031主芯片构成的51单片机的数控系统中,必须先扩展出EPROM才行。
下面假设系统已经扩展了EPROM,我们选择从4000H单元开始存放这些控制字,这就是控制表。
注意:事实上仅仅是将红色数据表示的控制字送入兰色数据表示的地址中,其它文字内容只是为了便于你理解什么是控制表,它能做什么。
将控制字与控制口对应后,只要按照节拍步骤,轮流向控制口输送各个控制字,就能使对应的步进电机各相绕组按照节拍顺序通断电了。
将控制字与内存单元地址对应之后,就能按照节拍步骤,轮流向内存单元取控制字,然后输送到控制口,实现对应的步进电机各相绕组的通断电。
从内存单元取控制字,并将控制字送到控制口的任务是用控制软件来实现的。即由控制软件实现:
指针指向第1个存储单元4000H取控制字01H送PA口,实现A通电指针指向第2个存储单元4001H取控制字03H送PA口,实现AB通电
………
指针指向第6个存储单元4005H取控制字05H送PA口,实现CA通电一个轮回以后,步进电机只走了6步,只要总步数超过6步,步进电机就还要继续运行,就要重新从从第1个存储单元4000H取控制字01H送P A口,再次实现A通电,这就是体现软件环形分配器思想的重要步骤:要将顺序执行到表底4005H的指针重新指向表头4000H。
除此之外还有一个软件设计的重要问题需要强调:那就是指针的保存问题。保存指针,实际就是保存刚刚实现的通电状态,因为指针所指的存储单元里存放着步进电机的通电状态。
为什么要保存这个通电状态呢?
当一个零件程序段执行完毕,下一个零件程序段到来时,步进电机应该按照上一零件程序段结束的状态接着起步。即如果程序段结束时是BC通电,指针指在4003H单元,那么下一零件程序段到来时,应该是C通电,指针应该指在4004H单元。所谓保存指针,指的就是把4004H单元这个地址保护起来。
如果不保护那将会是什么结果呢?
这要从整个控制程序的设计结构来说。
整个控制程序结构(包括插补、刀补等)是按照一个零件程序段的执行过程从取零件程序段、译码、输出控制字到最后实现走步来进行设计的。所以,对每个零件程序段来说都是从头执行控制程序。这样一来,如果这个软环配控制程序不设置保存指针,待到下一零件程序段到来时,软环配控制程序又要从头开始执行,那就要返回4000H单元去取01H控制字送PA口了,这就使步进电机从BC通电一下跳到A通电,这可能是多走三步,也可能是退回三步,(具体情况与运行频率、系统惯性等诸因素有关),反正将出现异常。所以在这个软环配程序中必须考虑控制字指针的保存问题。
设计思路是每执行一遍软环配程序给PA口送一个控制字,就要对指针保护一次,因为你并不知道每个零件程序段会令步进电机停在哪个状态。
硬件环形分配器中采用的触发器是有记忆功能的,也就是Q A、Q B、Q C 是0还是1,它是保存不变的,因此只要不断电,通电状态就是保存不变的。所以不必再考虑保存什么的问题。
环形计数器是由移位寄存器加上一定的反馈电路构成的,用移位寄存器构成环形计数器的一般框图见图23-5-1,它是由一个移位寄存器和一个组合反馈逻辑电路闭环构成,反馈电路的输出接向移位寄存器的串行输入端,反馈电路的输入端根据移位寄存器计数器类型的不同,可接向移位寄存器的串行输出端或某些触发器的输出端。 图23-5-1 移位寄存器型计数器方框图 23.5.1 环形计数器 23.5.1.1 电路工作原理 图23-5-2为一个四位环形计数器,它是把移位寄存器最低一位的串行输出端Q1反馈到最高位的串行输入端(即D触发器的数据端)而构成的,环形计数器常用来实现脉冲顺序分配的功能(分配器)。 假设寄存器初始状态为[Q4Q3Q2Q1]=1000,那么在移位脉冲的作用下,其状态将按表23-11 中的顺序转换。 当第三个移位脉冲到来后,Q1=1,它反馈到D4输入端,在第四个移位脉冲作用下Q4=1,回复到初始状态。表23-11中的各状态将在移位脉冲作用下,反复在四位移位寄存器中不断循环。
由上述讲讨论可知,该环形计数的计数长度为N=n。和二进制计数器相比,它有2n-n个状态没有利用,它利用的有效状态是少的。 23.5.1.2 状态转换图和工作时序 表23-11中是以1000为初始状态的,它所对应的状态转换图见图23-5-3。如果移位寄存器中的初始状态不同,就会有不同的状态转换图。图23-5-4给出了四位环形计数器可能有的其它几种状态转换图。 图23-5-3 状态转换图 (a) (b) (c) (d) 图23-5-4 四位环行计数器其它的状态转换图 图23-5-4(a)、(b)、(c)三个状态转换图中各状态是闭合的,相应的时序为循环时序。当计数器处于图23-5-4(d)所示的状态0000或1111时,计数器的状态将不发生变化。这两个状态称为悬态或死态。 四位环形计数器可能有这么多不同的循环时序,是我们不希望的,只能从这些循环时序中选出一个来工作,这就是工作时序,或称为正常时序,或有效时序。其它末被选中的循环时序称为异常时序或无效时序。一般选图23-5-3的时序为工作时序,因为它只循环一个“1”,不用经过译码就可从各触发器的Q端得到顺序脉冲输出,参看图23-5-5。
1.基本信息 实践题目:Peterson算法解决临界问题 完成人: 班级:07062301 姓名:陈杨 学号:0706230101 报告日期:2011年1月5日 2.实践内容简要描述 实践目标 1.理解临界区问题 2.掌握Peterson算法以解决临界区问题 实践内容 协作线程——兄弟问题 设置竞争条件: 定义两个全局变量:accnt1和accnt2,初值都为零; 创建两个线程acc1和acc2; (1)获得一个随机数 (2)从accnt1减去这个随机数; (3)将这个随机数加到accnt2中; (4)正确的话,accnt1+accnt2=0; (5)但在未实现线程互斥的情况下,accnt1+accnt2可能不为0。 用软件方法实现协作线程,以解决以上临界区问题——兄弟问题。 可采用Peterson算法或Dekker算法。 设计思路 利用Peterson算法,实现线程间的互斥。 boolean flag[2];//初值false int turn; do{ flag[i]:=true; turn=j; while(flag[j] and turn=j); 临界区; flag[i]=false; 剩余区; }while(1); i为线程自身的序号减去1,j为2减去该线程的序号。 当某一进程试图访问临界区时,若另一进程已在访问临界区,则该线程通过循 环等待直至另一线程退出临界区方可执行。 主要数据结构 typedef struct BrotherInfo { int miSerial; DWORD mdwDelay; } BROTHERINFO,*PBROTHERINFO;
步进电机环形分配器 (1)工作原理 步进电机控制主要有三个重要参数即转速、转过的角度和转向。由于步进电机的转动是由输入脉冲信号控制,所以转速是由输入脉冲信号的频率决定,而转过的角度由输入脉冲信号的脉冲个数决定。转向由环形分配器的输出通过步进电机A、B、C相绕组来控制,环形分配器通过控制各相绕组通电的相序来控制步电机转向。 如图1给出了一个双向三相六拍环形分配器的逻辑电路。电路的输出除决定于复位信号RESET外,还决定于输出端Q A、Q B、Q C的历史状态及控制信号-EN使能信号、CON正反转控制信号和输入脉冲信号。其真值表如表1所示。 图1 步进电机环形分配器 表1 真值表
(2)程序设计 程序设计采用组合逻辑设计法,由真值表可知: 当CON=0时,输出Q A、Q B、Q C的逻辑关系为: 当CON=1时,输出Q A、Q B、Q C的逻辑关系为: 当CON=0,正转时步进机A、B、C相线圈的通电相序为: 当CON=1,反转时各相线圈通电相序为: Q A、Q B、Q C的状态转换条件为输入脉冲信号上升沿到来,状态由前一状态转为后一状态,所以在梯形图中引入了上升沿微分指令。 PLC输入/输出元件地址分配见表2。 表2 PLC输入/输出元件地址分配表 根据逻辑关系画出步进电机机环形分配器的PLC梯形图,如图2所示。 CON10 Z EN CLK A B C A B C 1ΦΦ100100 01↑101110 01↑001010 01↑011011 01↑010001 01↑110101 01↑100100 PLC IN代号PLC OUT代号 X0CLK Y0Q A X1EN Y1Q B X2RESET Y2Qc X3CON
使用说明书 环形防喷器(D型) 河北华北石油荣盛机械制造有限公司地址:河北省任丘市会战道
目录 1.用途 (2) 2.产品规格及技术参数 (2) 2.1. 环形防喷器型号说明 (2) 2.2. 技术参数 (5) 3.工作原理 (13) 4.结构特点 (14) 4.1. 结构简单可靠 (14) 4.2. 耐磨圈结构 (14) 4.3. 唇形密封圈结构 (14) 4.4. 抗硫化氢性能 (15) 4.5. 球形胶芯 (15) 5.操作与维护 (16) 5.1. 安装 (16) 5.2. 强行起下钻操作 (17) 5.3. 正确使用环形防喷器 (18) 6.零部件拆装 (19) 6.1. 拆卸 (19) 6.1.1. ...................................... 胶芯的更换 19 6.1.2. .............................. 支持圈与活塞拆卸: 19 6.2. 装配 (19) 7.FH54-35的零部件拆装 (20) 8.橡胶件的存放 (21) 9.故障判断及排除方法 (22) 9.1. 防喷器封闭渗漏 (22) 9.2. 防喷器关闭后打不开 (22) 9.3. 防喷器开关不灵活 (22) 10.修理包明细 (22) 11.定货说明 (25)
1.用途 环形防喷器必须配备液压控制系统才能使用。通常它与闸板防喷器配套使用,但也可单独使用。它能完成以下作业: ●以密封各种形状和尺寸的方钻杆、钻杆、钻杆接头、钻铤、套管、 电缆等工具; ●当井内无钻具时,能全封闭井口; ●在使用缓冲贮能器的情况下,能通过18°/35°无细扣对焊接头, 进行强行起下钻作业。 ●环形防喷器仅是在关井时的一个过渡设备,不能用它长时间的封 井,长时间的封井应采用闸板防喷器; 2.产品规格及技术参数 2.1. 环形防喷器型号说明 ×××××——×× 额定工作压力(MPa) 通径代号 产品代号 产品代号:FH—球形胶芯环形防喷器 FHZ—锥形胶芯环形防喷器 额定工作压力:主要有四个等级,见下表 表 1 额定工作压力等级
环形振荡器 设计要求: 设计一环形振荡器,频率在120KHz 左右,尽量降低振荡频率和电源电压的相关性。 设计: 环形振荡器是有奇数个反相器构成的环形回路。电路如下图所示: 本设计中,由于振荡频率要求在120KHz 的低频,根据提供的工艺,寄生电容和电阻都很小,要实现如此之低的振荡频率需要非常多的反相器串联,电路冗长庞大。所以采用需要外加阻容元件降低工作频率。电路如下图所示。 反相器内部电路: 本设计要求尽量降低振荡频率和电源电压的相关性。造成这个相关性的原因主要来自电路的寄生电阻电容: 1. 对管的输出电阻Rn 或Rp 。 2 ()2n n THN VDD R KP W VDD V L =-可见VDD 越大,此电阻越小,振荡频率越高。 2. 寄生电容Cgd ,Cgs 。这两个参数对电源的相关性较小,但是也受一定的影响。 可见, 要有效降低振荡频率和电源电压的相关性,可采用外部的远大于寄生参数的元件来吸收寄生参数以达到目的。经分析,电路受电源影响较大的是对管的输出电阻Rn 或Rp, 它们的阻值大约为几千欧,这里,把外部的电阻取在400K 可以有效地降低相关性。根据振荡频率120KHz ,计算出τ=0.00833ms ,每一级的平均时延为/3τ=0.00278ms ,需要的电容
大小为3C R τ ==6.94pF 。这里设计的反相器输出端本身就有800fF 的电容,再考虑到寄生 电阻,电容,这里将外接电容的值取为5.5pF 。 Spice 网表文件: * Waveform probing commands .probe .options probefilename="ring_my1.dat" + probesdbfile="E:\Program Files\Tanner EDA\S-Edit\tutorial\schematic\ring_my1.sdb" + probetopmodule="ring_my1" .lib "E:\Gspice\HSPICE2002\H06MIXDDCT10V02.LIB" tt .lib "E:\Gspice\HSPICE2002\H06MIXDDCT10V02.LIB" resistor .lib "E:\Gspice\HSPICE2002\H06MIXDDCT10V02.LIB" bjt .SUBCKT inv in out Gnd Vdd c2 out Gnd 800ff m1p out in Vdd Vdd pmos L=5u W=12u mn1 out in Gnd Gnd nmos L=5u W=8u .ENDS * Main circuit: ring_my1 C1 N3 Gnd 5.5pF C2 N2 Gnd 5.5pF C3 a7 Gnd 5.5pF Xinv7 a7 OUT Gnd Vdd inv Xinv_1 N3 N5 Gnd Vdd inv Xinv_2 N2 N1 Gnd Vdd inv .print tran OUT R4 N2 OUT 400K TC=0.0, 0.0 R5 N1 N3 400K TC=0.0, 0.0 R6 N5 a7 400K TC=0.0, 0.0 .tran 50n 14000000n start=800000n VCC Vdd GND PWL (0 5 8000000n 4.5 9000000n 4 10000000n 3.5 11000000n 3 12000000n 2.5 13000000n 2) * End of main circuit: ring_my1 这里用的仿真软件是Tanner 系列的T-Spice 。 仿真:
计数器工作原理及应用 除了计数功能外,计数器产品还有一些附加功能,如异步复位、预置数(注意,有同步预置数和异步预置数两种。前者受时钟脉冲控制,后者不受时钟脉冲控制)、保持(注意,有保持进位和不保持进位两种)。虽然计数器产品一般只有二进制和十进制两种,有了这些附加功能,我们就可以方便地用我们可以得到的计数器来构成任意进制的计数器。下面我们举两个例子。在这两个例子中,我们分别用同步十进制加法计数器74LS160构成一个六进制计数器和一个一百进制计数器。 因为六进制计数器的有效状态有六个,而十进制计数器的有效状态有十个,所以用十进制计数器构成六进制计数器时,我们只需保留十进制计数器的六个状态即可。74LS160的十个有效状态是BCD编码的,即0000、0001、0010、0011、0100、0101、0110、0111、1000、1001[图5-1]。 图5-1 我们保留哪六个状态呢?理论上,我们保留哪六个状态都行。然而,为了使电路最简单,保留哪六个状态还是有一点讲究的。一般情况下,我们总是保留0000和1001两个状态。因为74LS160从100 1变化到0000时,将在进位输出端产生一个进位脉冲,所以我们保留了0000和1001这两个状态后,我们就可以利用74LS160的进位输出端作为六进制计数器的进位输出端了。于是,六进制计数器的状态循环可以是0000、0001、0010、0011、0100和1001,也可以是0000、0101、0110、0111、1000和1001。我们不妨采用0000、0001、0010、0011、0100和1001这六个状态。 如何让74LS160从0100状态跳到1001状态呢?我们用一个混合逻辑与非门构成一个译码器[图5. 3.37b],当74LS160的状态为0100时,与非门输出低电平,这个低电平使74LS160工作在预置数状态,当下一个时钟脉冲到来时,由于等于1001,74LS160就会预置成1001,从而我们实现了状态跳跃。
5.4 实例与练习 5.4.1 市区择房分析 1. 背景: 如何找到环境好、购物方便、小孩上学方便的居住区地段是购房者最关心的问题,因此购房者就需要从总体上对商品房的信息进行研究分析,选择最适宜的购房地段。 2.目的: 学会利用缓冲区分析和叠置分析解决实际问题。 1.数据: 试验数据位于\Chp7\Ex_1,请将练习拷贝至E:\Chp7\Ex1\ a)城市市区交通网络图(network.shp) b)商业中心分布图(Marketplace.shp) c)名牌高中分布图(school.shp) d)名胜古迹分布图(famous place.shp) 这些文件综合在一起是city.mxd 2.要求: 所寻求的市区是噪声要小,距离商业中心和各大名牌高中要近,是为了环境优雅离名胜古迹较近环境优雅。综合上述条件,给定一个定量的限定如下: a)离主要市区交通要道200米之外,交通要道的车流量大,噪音产生的主要源于此;(ST为 道路类型中的主要市区交通要道) b)距大型商业中心的影响,以商业中心的大小来确定影响区域,具体是以其属性字段YUZHI; c)距名牌高中在750米之内,以便小孩上学便捷; d)距名胜古迹500米之内。 最后分别将满足上述条件的其中一个条件的取值为1,不满足的取值为0,即如果满足距主要市区交通要道200米之内,取值为1,反之为0;其他亦是如此,最后将其累加得到分级。即满足三个条件的累加得到3,满足2个条件的得到2,最后将全部分成4级。 3.操作步骤: 首先打开ArcMap,打开E:\Chp7\Ex1\city.mxd文件将文件加入到窗口中来,这时五个文件全被加入ArcMap; (1)主干道噪音缓冲区的建立 1)选择交通网络图层(network.shp),打开图层的属性表,在右下角的打开option选项中,在菜单中选择select by attributes,在弹出的select by attributes对话框中,左边选择“TYPE”双击将其添加到对话框下面SQL算式表中,中间点“=”,再单击Get unique values将TYPE的全部属性值加入上面的列表框中,然后选择“ST”属性值,双击添加到SQL算式表中,单击APPLY按钮,就将市区的主要道路选择出来了;(图7.64)
(工作分析)计数器工作原理的模式化分析
计数器工作原理的模式化分析 时序逻辑电路是《脉冲和数字电路》这门课程的重要组成部分,计数器是时序逻辑电路基础知识的实际应用,其应用领域非常广泛。计数器原理是技工学校电工电子专业学生必须重点掌握的内容,也是本课程的考核重点,更是设计计数器或其他电子器件的基础。 但近年来技校学生的文化理论基础和理解能力普遍较差,按照课件体系讲授计数器这个章节的知识,超过70%的学生听不懂。 我先后为四届学生讲授过这门课,于教学实践中摸索出壹套分析计数器的方法——模式化分析,即把分析步骤模式化,引导学生按部就班地分析计数器。用这种方法分析,我只要以其中壹种计数器(如异步二进制计数器)为例讲解,学生便能够自行分析其他计数器。 教学实践证明,用这种方法讲授计数器知识,学生比较感兴趣,觉得条理清晰,易于理解,掌握起来比较轻松。这种方法仍有壹个好处,不管是同步计数器仍是异步计数器,不管是二进制计数器仍是十进制计数器,不管是简单的计数器仍是复杂的计数器,只要套用这种方法,计数器工作原理迎刃而解。即使是平时基础很差的学生,只要记住几个步骤,依葫芦画瓢,也能把计数器原理分析出个大概来。 一、明确计数器概念 分析计数器当然要先清楚什么是计数器啦。书上的概念是:
计数器是数字系统中能累计输入脉冲个数的数字电路。我告诉学生,计数器就是这样壹种电子设备:把它放于教室门口,每个进入教室的同学均于壹个按钮上按壹下,它就能告诉你壹共有多少位同学进入教室。其中,每个同学按壹下按钮就是给这个设备壹个输入信号,N个同学就给了N个信号,这N个信号就构成计数器的输入CP脉冲,计数器要统计的就是这个CP脉冲系列的个数。当然,如果没有接译码器,计数器的输出端显示的是二进制数而非十进制数,比如有9位同学进入教室,它不显示“9”,而是显示“1001”。 随后,我简要介绍了计数器的构成和分类,且强调,计数器工作前必须先复位,即每个触发器的输出端均置零。 二、回顾基础知识 分析计数器要用到触发器的关联知识,其中JK触发器最常用,偶尔用到T触发器和D触发器。因此,介绍完计数器概念后,我不急于教学生分析其原理,而是先提问JK、T、D触发器的关联知识,包括触发器的逻辑符号、特性方程、特性表等。 由于计数器的控制单元由逻辑门电路构成,分析前仍要简要回顾壹下和、或、非等常用逻辑门电路的关联知识。另外,用模式化方法分析计数器仍要用到逻辑代数的运算方法、逻辑函数的化简方法等关联知识。 三、画出解题模板 准备工作做完了,下面进入核心部分——列出分析计数器的
数控 数显 硬件脉冲环形分配器的设计 河北省农业工程学校 孙继山 在对一台数控机床维修中,发现其步进电动机 的环形分配器损坏,在原配件买不到的情况下,我用 D触发器和与非门电路进行代换,取得了成功。下 面将电路设计过程作一介绍。 1.根据电机的相数,选择D触发器的数量。一 个触发器控制步进电动机的一相。我们所用的步进 电动机是三相电动机,需用三个D触发器,分别用 F A、F B、F C表示。其状态分别用Q A、Q B、Q C表示。 2.根据步进电动机的通电方式,列出带方向控 制的真值表。三相步进电动机的通电方式有三相单 三拍、三相双三拍和三相单双六拍。由原电路集成 块YB013的3、4接高电平说明其工作在单双六拍。 用D作为方向控制,D=1电机正转、D=0电机反 转。列出的真值表如表1。 表1 真值表 D Q A N Q B N Q C N Q A N+1Q B N+1Q C N+1 1100110 1110010 1010011 1011011 1001101 1101100 0100101 0101001 0001011 0011010 0010110 0110100 3.根据真值表,利用卡诺图得每个触发器的次 态方程。以F A为例,画出卡诺图,由真值表添入数 值后结果如图1。 D Q A n Q B n Q C n000111 10 00x0 01 0110x1 1111x0 10x100 图1 卡诺图 经化简得: Q A n+1=D Q C n+DQ B n=D Q C n D Q B n Q B n+1和Q C n+1可用同样方法得出。也可根据三相电路的对称性,由Q A n+1的表达式推出: Q B n+1=D Q C n D Q B n Q C n+1=D Q B n DQ A n 4.对照D触发器的特性方程:Q n+1=D,得到每个触发器的驱动方程: D A=D Q C n D Q B n D B=D Q A n D Q C n D C=D Q B n D Q A n 5.由驱动方程画出脉冲分配器电路如图2。 图2 脉冲分配器电路 图3 原电路接线图 6.应用:原电路接线如图3所示。图中8031单片机用P1口的三根口线P1 0、P1 1、P1 2实现对环分电路的控制,其中: P1 0:方向控制输出端,接至代换电路的D端。 P1 1:输出控制信号,可用其封锁代换电路的CP 脉冲。 P1 2:环分电路复位控制,接至代换电路的R。代换电路的CP脉冲直接接8155定时器的定时输出。 (收稿日期:2000-12-15) ! 11 ! 数控 数显 机床电器2001No.6
. ... . .. 使用说明书 环形防喷器(D型) 河北华北石油荣盛机械制造有限公司地址:河北省任丘市会战道
目录 1.用途 (2) 2.产品规格及技术参数 (2) 2.1.环形防喷器型号说明 (2) 2.2.技术参数 (4) 3.工作原理 (9) 4.结构特点 (10) 4.1.结构简单可靠 (10) 4.2.耐磨圈结构 (10) 4.3.唇形密封圈结构 (10) 4.4.抗硫化氢性能 (11) 4.5.球形胶芯 (11) 5.操作与维护 (12) 5.1.安装 (12) 5.2.强行起下钻操作 (13) 5.3.正确使用环形防喷器 (14) 6.零部件拆装 (14) 6.1.拆卸 (14) 6.1.1.胶芯的更换 (14) 6.1.2.支持圈与活塞拆卸: (15) 6.2.装配 (15) 7.FH54-35的零部件拆装 (15) 8.橡胶件的存放 (17) 9.故障判断及排除方法 (17) 9.1.防喷器封闭渗漏 (17) 9.2.防喷器关闭后打不开 (17) 9.3.防喷器开关不灵活 (18) 10.修理包明细 (18) 11.定货说明 (20)
1.用途 环形防喷器必须配备液压控制系统才能使用。通常它与闸板防喷器配套使用,但也可单独使用。它能完成以下作业: ●以密封各种形状和尺寸的方钻杆、钻杆、钻杆接头、钻铤、套管、电缆等工 具; ●当井内无钻具时,能全封闭井口; ●在使用缓冲贮能器的情况下,能通过18°/35°无细扣对焊接头,进行强行 起下钻作业。 ●环形防喷器仅是在关井时的一个过渡设备,不能用它长时间的封井,长时间 的封井应采用闸板防喷器; 2.产品规格及技术参数 2.1.环形防喷器型号说明 ×××××——×× 额定工作压力(MPa) 通径代号 产品代号 产品代号:FH—球形胶芯环形防喷器 FHZ—锥形胶芯环形防喷器 额定工作压力:主要有四个等级,见下表 表 1 额定工作压力等级
实验三:环形振荡器版图设计 一、实验目的 1、使用现有的布局实例创建新的布局; 2、仿真提取版图; 二、实验要求 1、打印出DRC报告; 2、输出CMOS环形振荡器的后置仿真结果,包括瞬态响应、振荡频率和平均功率。 三、实验工具 Virtuoso 四、实验内容 1、创建CMOS环形振荡器电路原理图; 2、创建CMOS环形振荡器的版图; 3、后仿真(Post-layout simulation,PLS)。
1、创建CMOS环形振荡器的电路原理图 在library manager界面选中lab1(自己创建的库),并点击菜单栏上的file->new->cell view,创建CMOS环形振荡器的电路原理图。 图1 CMOS环形振荡器电路原理图的创建 因为CMOS环形振荡器是由几个CMOS反相器组成的,在前面两个实验中已经创建好了CMOS反相器的电路原理图,所以可以直接调用CMOS反相器,在schematic editing窗口利用快捷键’i’打开添加实例窗口,选择之前所创建的CMOS反相器,如图2所示,连续放置5个。 图2 添加CMOS反相器 将5个CMOS反相器一次首尾相连,接着创建一个输出引脚,放置在最后一个CMOS反相器后,并通过wire将它们连接起来,具体如图3所示:
图3 CMOS环形振荡器电路原理图 2、创建CMOS环形振荡器的版图 与创建CMOS反相器的版图类似,也是在library manager窗口先选中lab1,在选择file->new->cell view,在弹出的窗口中输入环形振荡器的信息如图4所示: 图4 CMOS环形振荡器版图的创建 在layout editing中添加5个CMOS反相器,并将它们摆放在一起,中间的金属正好相接,如图5所示: 图5 CMOS环形振荡器版图
计数器原理分析及应用实例 除了计数功能外,计数器产品还有一些附加功能,如异步复位、预置数(注意,有同步预置数和异步预置数两种。前者受时钟脉冲控制,后者不受时钟脉冲控制)、保持(注意,有保持进位和不保持进位两种)。虽然计数器产品一般只有二进制和十进制两种,有了这些附加功能,我们就可以方便地用我们可以得到的计数器来构成任意进制的计数器。下面我们举两个例子。在这两个例子中,我们分别用同步十进制加法计数器74LS160构成一个六进制计数器和一个一百进制计数器。 因为六进制计数器的有效状态有六个,而十进制计数器的有效状态有十个,所以用十进制计数器构成六进制计数器时,我们只需保留十进制计数器的六个状态即可。74LS160的十个有效状态是BCD编码的,即0000、0001、0010、0011、0100、0101、0110、0111、1000、1001[图5-1]。 图5-1 我们保留哪六个状态呢?理论上,我们保留哪六个状态都行。然而,为了使电路最简单,保留哪六个状态还是有一点讲究的。一般情况下,我们总是保留0000和1001两个状态。因为74LS160从1001变化到0000时,将在进位输出端产生一个进位脉冲,所以我们保留了0000和1001这两个状态后,我们就可以利用74LS160的进位输出端作为六进制计数器的进位输出端了。于是,六进制计数器的状态循环可以是0000、0001、0010、0011、0100和1001,也可以是0000、0101、0110、0111、1000和1001。我们不妨采用0000、0001、0010、0011、0100
和1001这六个状态。 如何让74LS160从0100状态跳到1001状态呢?我们用一个混合逻辑与非门构成一个译码器[图5.3.37b],当74LS160的状态为0100时,与非门输出低电平,这个低电平使74LS160工作在预置数状态,当下一个时钟脉冲到来时,由于等于1001,74LS160就会预置成1001,从而我们实现了状态跳跃。 图5.3.37b用置数法将74160接成六进制计数器(置入1001) 比这个方案稍微繁琐一点的是利用74LS160的异步复位端。下面这个电路中[图5.3.34],也有一个由混合逻辑与非门构成的译码器。 图5.3.34用置零法将74LS160接成六进制计数器
第二章进程管理 2. 试画出下面4条语句的前趋图: S2: b:=z+1; S3: c:=a-b; S4: w:=c+1; 3. 程序在并发执行时,由于它们共享系统资源,以及为完成同一项任务而相互合作, 致使在这些并发执行的进程之间,形成了相互制约的关系,从而也就使得进程在执行期间出现间断性。 4. 程序并发执行时为什么会失去封闭性和可再现性? 因为程序并发执行时,是多个程序共享系统中的各种资源,因而这些资源的状态是 由多个程序来改变,致使程序的运行失去了封闭性。而程序一旦失去了封闭性也会导致其再失去可再现性。 5. 在操作系统中为什么要引入进程概念?它会产生什么样的影响? 为了使程序在多道程序环境下能并发执行,并能对并发执行的程序加以控制和描述,从而在操作系统中引入了进程概念。 影响: 使程序的并发执行得以实行。 6. 试从动态性,并发性和独立性上比较进程和程序? a. 动态性是进程最基本的特性,可表现为由创建而产生,由调度而执行,因得不到资源 而暂停执行,以及由撤销而消亡,因而进程由一定的生命期;而程序只是一组有序指令的集合,是静态实体。 b. 并发性是进程的重要特征,同时也是OS的重要特征。引入进程的目的正是为了使其 程序能和其它建立了进程的程序并发执行,而程序本身是不能并发执行的。 c. 独立性是指进程实体是一个能独立运行的基本单位,同时也是系统中独立获得资源和 独立调度的基本单位。而对于未建立任何进程的程序,都不能作为一个独立的单位来运行。 7. 试说明PCB的作用?为什么说PCB是进程存在的唯一标志? a. PCB是进程实体的一部分,是操作系统中最重要的记录型数据结构。PCB中记录了操 作系统所需的用于描述进程情况及控制进程运行所需的全部信息。因而它的作用是使一个在多道程序环境下不能独立运行的程序(含数据),成为一个能独立运行的基本单位,一个能和其它进程并发执行的进程。 b. 在进程的整个生命周期中,系统总是通过其PCB对进程进行控制,系统是根据进程 的PCB而不是任何别的什么而感知到该进程的存在的,所以说,PCB是进程存在的唯一标志。 8. 试说明进程在三个基本状态之间转换的典型原因. a. 处于就绪状态的进程,当进程调度程序为之分配了处理机后,该进程便由就绪状态变 为执行状态。 b. 当前进程因发生某事件而无法执行,如访问已被占用的临界资源,就会使进程由执行 状态转变为阻塞状态。 c. 当前进程因时间片用完而被暂停执行,该进程便由执行状态转变为就绪状态。 9. 为什么要引入挂起状态?该状态有哪些性质? a. 引入挂起状态主要是出于4种需要(即引起挂起的原因): 终端用户的请求,父进程 请求,负荷调节的需要,操作系统的需要。
步进电机论文:五相混合式步进电动机环形分配器的设计 2012年1月21日 五相混合式步进电机环形分配器的设计 徐殿国王宗培(哈尔滨工业大学) l引言 五相混合式步进电机具有许多优良的性能,因此在国内外都得到了较大发展,其驱动技术也取得了很大进步[1]。由于五相混合式步进电动机系统的研制和开发历史不长,电机驱动电源中的环形脉冲分配器专用芯片目前尚未见到,国内外厂家生产的五相混合式步进电动机驱动电源中的环形脉冲分配器大都是由数字逻辑集成电路或EPROM存贮器构成的[2.3]。由于电机的运行节拍和运行方式较多,采用这些方式设计的环形脉冲分配器结构复杂、功能较少、可靠性不高。近年来随着逻辑可编程器件的出现,为逻辑电路的设计提供了极大的灵活性,因此完全可以用逻辑可编程器件(例如PAL、GAL等)设计步进电动机的环形脉冲分配器。本文给出由两片GAL16V8构成的五相混合式步进电动机环形脉冲分配器的设计方法。 2五相混合式步进电机的励磁方式及环形脉冲分配逻辑 根据五相混合式步进电机韵工作原理,可以得到如表1所示的励磁方式。可见五相混合式步进电机的励磁方式很多,但是运行节拍只有两种即整步10拍和半步20拍。尽管该电机的励磁方式很多,但从电机运行的平稳陛和获得最大合成转矩的角庋出发,表1五相混合式步进电动
机的励磁方式常采用4-4相通电方式作为整步运行方式,4-5相通电方式作为半步运行方式。整步运行方式中的5-5相通电方式虽较4-4相通电方式的合成转矩大,但由于驱动电源中采用桥式电路时存在上下桥臂换向容易引起短路而较少采用。本文给出的是4-4相通电方式和5-5相通电方式的环形脉冲分配器设计方法。 根据五相混合式步进电机的合成转矩矢量图[4],可以得到4-5相励磁方式和4-4相励磁方式下的逻辑通电状态变化顺序,如表2所示。与之对应的功放电路形式如图1所示。表2中的“1”代表功率管导通,“0”代表功率管关断。其中正转的逻辑通电状态变化顺序 为。 表2中序号为奇数的逻辑通电状态即为4-4相励磁方式。
环形防喷器维护与操作指南 油田管具生产合作公司 1995年10月1日
保证书 油田管具生产合作公司生产的所有产品,在开始使用的一年内,并且是在压力范围内使用,我们保证不会存在工艺和材料方面的缺陷。油田管具生产合作公司仅限于免费替换发现的在材料或者工艺上有缺陷的部件。点检包括由疏忽引起的缺陷,但不包括:劳务支出的赔偿以及由这种不足导致的买方的损失,在一般民事法律或严格的执法胜诉所花费用,由于延期产生的损失、价值的消耗,其他直接或间接的损失或任何破坏性的结果。此保证书专用于其他说明书明确提到的情况、销售说明书暗含的情况和超过说明书使用范围但合适的特殊情况下。在产品不完全是我公司生产的情况下,管道工的义务限于他对油田管具生产合作公司的义务之中,仅仅有权从该产品和部件的厂商复原。
环形防喷器操作指南 1995年10月1日 简介 在井控技术中,环形防喷器是一项独特的设计。与其他的环形防喷器不同,该产品在它的封闭元件中没有使用金属头。这样就允许该防喷器能关闭井中的多个对象,就像开井时一样不会损坏那些精密的设备,例如电潜泵电缆或者纤维玻璃管道。另外该产品没有可移动的机械部件,例如活塞和动力封等容易被封闭液体中的杂质损害的部件。外部封隔器作为一个挡板来传输水压到内部封隔器并关闭环形防喷器。 特点和装配指南 与市场上其他的环形防喷器不同,该产品是一个进行压力开合环行防喷器,并能在包括氮气、水及水力流体等任何介质中操作使用,在水力流体中更好。必须将压力源与位于防喷器上的两个NPT汽缸口中的其中一个,用一条高压柔韧管线最好是1英寸管线连接起来。两个汽缸口都可以使用,且在防喷器两面隔180度,这样设计仅仅是为了方便。在一个储蓄器关闭系统上使用一个三位四通阀(典型硬件),水力管线应该连接到在关闭系统后边的“关闭”汽缸口上。“开”汽缸口一定要封死。在防喷器和水力管线之间,建议安装一个1英寸300MPa的球阀。(详情见下) 该产品的另一个特点是它的防喷器工作压力和关闭心子操作液压比是1:1。也就是说,例如,如果井口压力是100Mpa时,那么关闭
步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器)L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可
课 程 设 计 2014——2015学年 第2学期 课 程 操作系统 学 院 计算机科学与技术学院 专 业 软件卓越工程师 班 级 软工zy1302 姓 名 指导教师 刘 军
《操作系统原理》课程设计任务书 学生姓名:专业班级:软件zy1302 指导教师:刘军工作单位:计算机科学与技术学院 课程题目:实现生产者消费者(Bounded – Buffer Problem)问题 课程名称:操作系统/Operating System 周数/学分:1周/1学分 先修课程:高级语言程序设计、汇编语言、数据结构、计算机组成原理 适用专业:计算机科学与技术、软件工程 开课学院、系或教研室:计算机科学与技术学院 一、课程设计的目的 通过研究Linux的线程机制和信号量实现生产者消费者(Bounded Buffer)问题的并发控制。 二、课程设计的内容和要求 实现生产者消费者(Bounded – Buffer Problem)问题 通过研究Linux的线程机制和信号量实现生产者消费者(Bounded Buffer)问题的并发控制。 实验条件要求:每人一台与Linux主机联网的Windows主机,普通用户权限。 指导教师签名:2015年6月 系主任(或责任教师)签名:2015年6月
目录 摘要及关键字 (1) 设计题目与要求 (2) 1.总的设计思想及系统平台,语言,工具 (2) 1.1设计思想 (2) 1.2系统平台、语言和工具 (3) 2.数据结构与模块说明 (3) 2.1数据结构 (3) 2.1.1生产者进程结构 (3) 2.1.2消费者进程结构 (3) 2.1.3 POSIX无名信号量 (4) 2.2模块说明 (4) 2.2.1生产者进程 (4) 2.2.2消费者进程 (5) 3.源程序 (6) 4.调试记录 (9) 5.自我评价与总结 (10) 6.参考文献 (10) 评分表 (11)
课程数控实验 题目基于LPC2114的直流电机控制系统学院信息工程学院 专业13计算机测控 学号3113002316、3113002317、 3113002318、3113002319 姓名谢志鹏、杨光、叶国康、曾晖
基于LPC2114的步进电机控制器 一.实验要求 1.用一片LPC2000处理器或单片机设计步进电机驱动器,实现脉冲环形分配器和放大驱动电路功能,驱动步进电机运行。 2.用另外一片LPC2000处理器设计数控系统,设置步进电机步进运动方向选择开关、电位器输入步进运动速度、键盘输入步进运动步数,设置运动脉冲和方向信号输出给步进电机驱动器,实现对步进电机的运动控制信号给定。 二.实验原理 1.LPC2103部分(步进电机驱动部分): (1)脉冲输入:利用LPC2103芯片的脉宽调制器(PWM)产生占空比为50%的方波信号。 (2)正反转:把L297的CW/CCW接到LPC2103的一个引脚,通过控制该引脚电平的高低即可实现控制电机正反转。 (3)步进步数控制:把步进电机控制器的定时器0设置成捕获计数模式,当捕获到一个脉冲时,TC 加1,直到TC等于给定步数时,停止方波输出。 2.LPC2114(信号输入部分) (1)步进运动速度输入:通过调节电位器,再经过LPC2114的AD转换,得到电位器触点的电压值。将电压值按照一定的比例换算成速度值,通过串口发送到LPC2103(步进电机控制器),以改变方波的频率。 (2)步进步数输入:通过键盘输入步进步数,将结果通过串口发送到LPC2103(步进电机控制器)。
三.硬件电路 图3.1 电路图 L297是步进电机控制器,适用于双极性两相步进电机或单极性四相步进电机的控制,可有半步、整步和波状三种驱动模式。片内斩波电路允许开关式控制绕组电流。该器件的一个显著特点是仅需时钟、方向和模式输入信号。步进电机所需相位由电路内部产生,大大减轻了的负担。 L297的引脚端功能如下: ◆引脚端10(使能端EN)为芯片的片选信号,高电平有效; ◆引脚端20(复位RST),低电平有效; ◆引脚端19(HALF/FULL)和引脚端17(CW/CCW)都通过上拉电阻链接到高电平; ◆引脚端18(时钟输入CLK)的最大输入时钟频率不能超过5KHz,控制时钟的频率,即可控制电机转 动速率; ◆引脚端19(HALF/FULL)决定电机的转动方式,HALF/FULL=0,电机按整步方式运转,HALF/FULL=1,
《嵌入式操作系统》实验指导书 实验1 Linux编程基础 实验序号:1 实验名称:Linux编程基础 适用专业:计算机科学与技术学时数:4学时 一、实验目的 1、熟悉Vim的工作模式,熟练使用vim中的常见操作。 2、熟练掌握gcc编译命令及gdb的调试命令,通过对有问题程序的跟踪调试,进一步提高发现问题和解决问题的能力。 3、熟悉多文件的makefile的编写,熟悉各种形式的makefile,并且进一步加深对makefile中用户自定义变量、自动变量的理解。 4、使用autotools生成多文件的makefile,进一步掌握autotools的使用方法。 二、实验内容 1、vim使用练习 (1)在“/root”目录下建一个名为“vim”的目录。 (2)进入“vim”目录。 (3)将文件“/etc/inittab”复制到“vim”目录下。 (4)使用vim打开“vim”目录下的inittab. (5)设定行号,指出设定initdefault(类似于“id:5:initdefault”)的所在行号。 (6)将光标移到该行。 (7)复制该行内容。 (8)将光标移到最后一行行首。 (9)粘贴复制行的内容。 (10)撤销第9步的动作。 (11)将光标移动到最后一行的行尾。 (12)粘贴复制行的内容。 (13)光标移到“si::sysinit:/etc/rc.d/rc.sysinit”。 (14)删除该行。 (15)存盘但不退出。 (16)将光标移到首行。 (17)插入模式下输入“Hello,this is vi world!”. (18)返回命令行模式。 (19)向下查找字符串“0:wait”。 (20)再向上查找字符串“halt”。
编制基于MCS51系列单片机汇编语言的能够实现3相6拍软件环形分配器正反转运行功能的程序。 正反转的识别由开关K7识别,设K7连接8031的P1.7,而三相电机的A、B、C通电状态由P1.0、P1.1、P1.2三条口线控制。 开关K7闭合,P1.7=1, 接正转,实现:A→AB→B→BC→C→CA→A 开关K7断开,P1.7=0, 接反转,实现:A→AC→C→CB→B→BA→A 硬件电路如图: ORG 0000H SJMP START ORG 0030H TABLE: DB 01H DB 03H DB 02H DB 06H DB 04H DB 05H ORG 0040H START:MOV SP, #60H SETB P1.7 JB P1.7, ZZH SJMP FZH ZZH: MOV DPTR, #TABLE
MOV R0, #0H LOOP1: MOV A, R0 MOVC A, @A+DPTR ORL P1, A ACALL DELAY CJNE R0, #05H, NEXT1 MOV R0, #0H SJMP LOOP1 NEXT1: INC R0 SJMP LOOP1 FZH: MOV DPTR, #TABLE MOV R0, #0H LOOP2: MOV A, R0 MOVC A, @A+DPTR ORL P1, A ACALL DELAY CJNE R0, #0H, NEXT2 MOV R0, #05H SJMP LOOP2 NEXT2: DEC R0 SJMP LOOP2 DELAY: MOV R7, #10H
DELAY1: MOV R6, #0FFH DELAY2: MOV R5, #0FFH DELAY3: DJNZ R5, DELAY3 DJNZ R6, DELAY2 DJNZ R7, DELAY1 RET END