数控 数显
硬件脉冲环形分配器的设计
河北省农业工程学校 孙继山
在对一台数控机床维修中,发现其步进电动机
的环形分配器损坏,在原配件买不到的情况下,我用
D触发器和与非门电路进行代换,取得了成功。下
面将电路设计过程作一介绍。
1.根据电机的相数,选择D触发器的数量。一
个触发器控制步进电动机的一相。我们所用的步进
电动机是三相电动机,需用三个D触发器,分别用
F A、F B、F C表示。其状态分别用Q A、Q B、Q C表示。
2.根据步进电动机的通电方式,列出带方向控
制的真值表。三相步进电动机的通电方式有三相单
三拍、三相双三拍和三相单双六拍。由原电路集成
块YB013的3、4接高电平说明其工作在单双六拍。
用D作为方向控制,D=1电机正转、D=0电机反
转。列出的真值表如表1。
表1 真值表
D Q A N Q B N Q C N Q A N+1Q B N+1Q C N+1
1100110
1110010
1010011
1011011
1001101
1101100
0100101
0101001
0001011
0011010
0010110
0110100
3.根据真值表,利用卡诺图得每个触发器的次
态方程。以F A为例,画出卡诺图,由真值表添入数
值后结果如图1。
D Q
A n
Q B n
Q C n000111
10
00x0
01
0110x1 1111x0 10x100
图1 卡诺图
经化简得:
Q A n+1=D Q C n+DQ B n=D Q C n D Q B n
Q B n+1和Q C n+1可用同样方法得出。也可根据三相电路的对称性,由Q A n+1的表达式推出:
Q B n+1=D Q C n D Q B n Q C n+1=D Q B n DQ A n
4.对照D触发器的特性方程:Q n+1=D,得到每个触发器的驱动方程:
D A=D Q C n D Q B n D B=D Q A n D Q C n
D C=D Q B n D Q A n
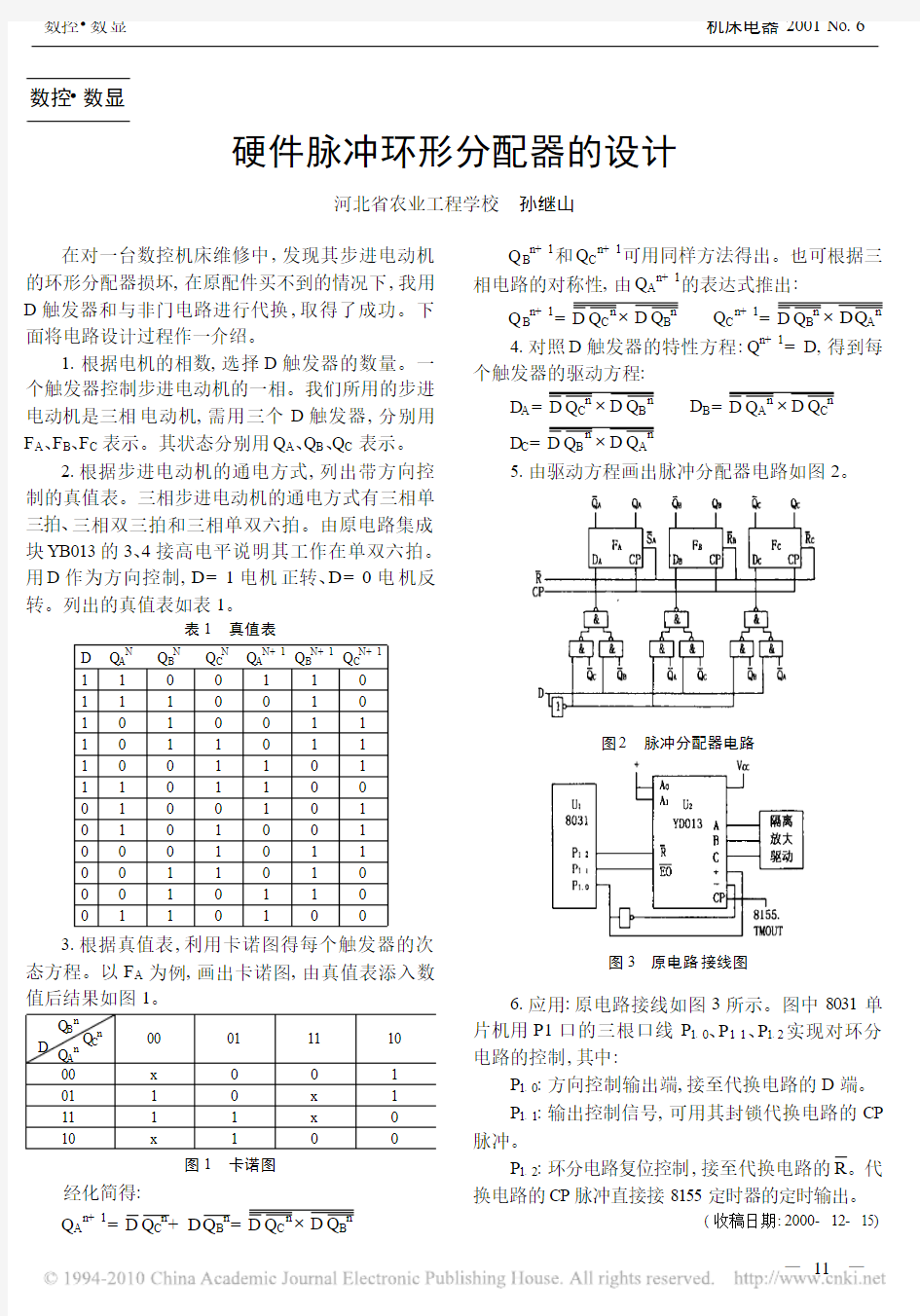
5.由驱动方程画出脉冲分配器电路如图2。
图2 脉冲分配器电路
图3 原电路接线图
6.应用:原电路接线如图3所示。图中8031单片机用P1口的三根口线P1 0、P1 1、P1 2实现对环分电路的控制,其中:
P1 0:方向控制输出端,接至代换电路的D端。
P1 1:输出控制信号,可用其封锁代换电路的CP 脉冲。
P1 2:环分电路复位控制,接至代换电路的R。代换电路的CP脉冲直接接8155定时器的定时输出。
(收稿日期:2000-12-15)
!
11
!
数控 数显 机床电器2001No.6
1绪论 1.1论文的研究背景 电源设备用以实现电能变换和功率传递,是一种技术含量高、知识面宽、更新换代快的产品。现今已广泛应用到工业、能源、交通、运输、信息、航空、航天、航运、国防、教育、文化等领域。在信息时代,上述各行各业都在迅猛地发展,发展的同时又对电源产业提出了更多更高的要求。显然,电源技术的发展将 带动相关技术的发展,而相关技术的发展反过来又推动了电源产业的发展。当前在电源产业,占主导地位的产品有各种线性稳压电源、通讯用的AC y DC开关电源、DC y DC开关电源、交流变频调速电源、电解电镀电源、高频逆变式整流焊接电源、中频感应加热电源、电力操作电源、正弦波逆变电源、大功率高频高压直流稳压电源、绿色照明电源、化学电源、UPS可靠高效低污染的光伏逆变电 源、风光互补型电源等。而与电源相关的技术有高频变换技术、功率转换技术、数字化控制技术、全谐振高频软开关变换技术、同步整流技术、高度智能化技术、电磁兼容技术、功率因数校正技术、保护技术、并联均流控制技术、脉宽调制技术、变频调速技术、智能监测技术、智能化充电技术、微机控制技术、集成化技术、网络技术、各种形式的驱动技术和先进的工艺技术。 1.2脉冲电源的特点及发展动态 脉冲电源是各种电源设备中比较特殊的一种,顾名思义,它的电压或电流波 形为脉冲状。按脉冲电源的输出特性分类,有高频、低频、单向、双向、高压、低压等不同的分类,具体选择怎样的输出电压、输出电流和开关频率,根据具体的应用场合而定。按脉冲波形分,有矩形波、三角波、梯形波、锯齿波等多种形式,如图1. 1所示。 图1 . 1各种脉冲波形 由于矩形波具有较好的可控性和易操作性,所以这种波形的应用居多。究其本质,
步进电机环形分配器 (1)工作原理 步进电机控制主要有三个重要参数即转速、转过的角度和转向。由于步进电机的转动是由输入脉冲信号控制,所以转速是由输入脉冲信号的频率决定,而转过的角度由输入脉冲信号的脉冲个数决定。转向由环形分配器的输出通过步进电机A、B、C相绕组来控制,环形分配器通过控制各相绕组通电的相序来控制步电机转向。 如图1给出了一个双向三相六拍环形分配器的逻辑电路。电路的输出除决定于复位信号RESET外,还决定于输出端Q A、Q B、Q C的历史状态及控制信号-EN使能信号、CON正反转控制信号和输入脉冲信号。其真值表如表1所示。 图1 步进电机环形分配器 表1 真值表
(2)程序设计 程序设计采用组合逻辑设计法,由真值表可知: 当CON=0时,输出Q A、Q B、Q C的逻辑关系为: 当CON=1时,输出Q A、Q B、Q C的逻辑关系为: 当CON=0,正转时步进机A、B、C相线圈的通电相序为: 当CON=1,反转时各相线圈通电相序为: Q A、Q B、Q C的状态转换条件为输入脉冲信号上升沿到来,状态由前一状态转为后一状态,所以在梯形图中引入了上升沿微分指令。 PLC输入/输出元件地址分配见表2。 表2 PLC输入/输出元件地址分配表 根据逻辑关系画出步进电机机环形分配器的PLC梯形图,如图2所示。 CON10 Z EN CLK A B C A B C 1ΦΦ100100 01↑101110 01↑001010 01↑011011 01↑010001 01↑110101 01↑100100 PLC IN代号PLC OUT代号 X0CLK Y0Q A X1EN Y1Q B X2RESET Y2Qc X3CON
硬件电子电路基础
第一章半导体器件 §1-1 半导体基础知识 一、什么是半导体 半导体就是导电能力介于导体和绝缘体之间的物质。(导电能力即电导率)(如:硅Si 锗Ge等+4价元素以及化合物)
二、半导体的导电特性 本征半导体――纯净、晶体结构完整的半导体称为本征半导体。 硅和锗的共价键结构。(略) 1、半导体的导电率会在外界因素作用下发生变化 ?掺杂──管子 ?温度──热敏元件 ?光照──光敏元件等 2、半导体中的两种载流子──自由电子和空穴 ?自由电子──受束缚的电子(-) ?空穴──电子跳走以后留下的坑(+) 三、杂质半导体──N型、P型 (前讲)掺杂可以显著地改变半导体的导电特性,从而制造出杂质半导体。 ?N型半导体(自由电子多) 掺杂为+5价元素。如:磷;砷P──+5价使自由电子大大增加原理:Si──+4价P与Si形成共价键后多余了一个电子。 载流子组成: o本征激发的空穴和自由电子──数量少。 o掺杂后由P提供的自由电子──数量多。 o空穴──少子 o自由电子──多子 ?P型半导体(空穴多) 掺杂为+3价元素。如:硼;铝使空穴大大增加 原理:Si──+4价B与Si形成共价键后多余了一个空穴。 B──+3价 载流子组成:
o本征激发的空穴和自由电子──数量少。 o掺杂后由B提供的空穴──数量多。 o空穴──多子 o自由电子──少子 结论:N型半导体中的多数载流子为自由电子; P型半导体中的多数载流子为空穴。 §1-2 PN结 一、PN结的基本原理 1、什么是PN结 将一块P型半导体和一块N型半导体紧密第结合在一起时,交界面两侧的那部分区域。 2、PN结的结构 分界面上的情况: P区:空穴多 N区:自由电子多 扩散运动: 多的往少的那去,并被复合掉。留下了正、负离子。 (正、负离子不能移动) 留下了一个正、负离子区──耗尽区。 由正、负离子区形成了一个内建电场(即势垒高度)。 方向:N--> P 大小:与材料和温度有关。(很小,约零点几伏)
《机电传动与控制》第07章在线测试 《机电传动与控制》第07章在线测试剩余时间:57:58 答题须知:1、本卷满分20分。 2、答完题后,请一定要单击下面的“交卷”按钮交卷,否则无法记录本试卷的成绩。 3、在交卷之前,不要刷新本网页,否则你的答题结果将会被清空。 第一题、单项选择题(每题1分,5道题共5分) 1、下列叙述正确的是 A、步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移的机电执行元件 B、步进电动机结构与一般的旋转电动机不同,没有定子和转子的分别 C、步进电动机不能把电脉冲信号转换为直线位移 D、步进电动机的机构形式繁多,工作原理也各不相同 2、关于步进电动机通电方式中,“拍”的描述正确的是 A、步进电动机的拍数就是其电源相数 B、步进电动机从一种通电状态转换到另 一种通电状态就叫做一“拍” C、若为三相步进电动机,从一相通电,切换到另一项通电,即为一拍 D、步进电动机每一拍只能有一相电源通电 3、异步电动机的步距角的说明,正确的是 A、步进电动机的转子齿数Z和定子相数(或运行拍数)越少,则步距角越大,控制越精确 B、步进电动机的转子齿数Z和定子相数(或运行拍数)越少,则步距角越小,控制越精确 C、步进电动机的转子齿数Z和定子相数(或运行拍数)越多,则步距角越大,控制越精确 D、步进电动机的转子齿数Z和定子相数(或运行拍数)越多,则步距角越小,控制越精确 4、在步进电动机采用单、双六拍通电方式时,其状态系数K的值为, A、0 B、1 C、2 D、3 5、下列关于步进电动机通电方式分配的说明,正确的是 A、步进电动机为实现轮流通电,需将控制脉冲按规定通电方式分配到每相绕组。其分配方式只能通过硬件电路实现 B、步进电动机为实现轮流通电,需将控制脉冲按规定通电方式分配到每相绕组。其分配方式只能通过软件实现 C、步进电动机为实现轮流通电,需将控制脉冲按规定通电方式分配到每相绕组。其分配方式既能通过硬件电路实现,又能通过软件 D、步进电动机为实现轮流通电,需将控制脉冲按规定通电方式分配到每相绕组。其分配方式只能通过硬件环形分配器实现
平台的选择很多时候和系统选择的算法是相关的,所以如果要提高架构,平台的设计能力,得不断提高自身的算法设计,复杂度评估能力,带宽分析能力。 常用的主处理器芯片有:单片机,ASIC,RISC(DEC Alpha、ARC、ARM、MIPS、PowerPC、SPARC和SuperH ),DSP和FPGA等,这些处理器的比较在网上有很多的文章,在这里不老生常谈了,这里只提1个典型的主处理器选型案例。 比如市场上现在有很多高清网络摄像机(HD-IPNC)的设计需求,而IPNC的解决方案也层出不穷,TI的解决方案有DM355、DM365、DM368等,海思提供的方案则有Hi3512、Hi3515、Hi3520等,NXP提供的方案有PNX1700、PNX1005等。 对于HD-IPNC的主处理芯片,有几个主要的技术指标:视频分辨率,视频编码器算法,最高支持的图像抓拍分辨率,CMOS的图像预处理能力,以及网络协议栈的开发平台。 Hi3512单芯片实现720P30 编解码能力,满足高清IP Camera应用, Hi3515可实现1080P30的编解码能力,持续提升高清IP Camera的性能。 DM355单芯片实现720P30 MPEG4编解码能力,DM365单芯片实现720P30 编解码能力, DM368单芯片实现1080P30 编解码能力。 DM355是2007 Q3推出的,DM365是2009 Q1推出的,DM368是2010 Q2推出的。海思的同档次解决方案也基本上与之同时出现。 海思和TI的解决方案都是基于linux,对于网络协议栈的开发而言,开源社区的资源是没有区别的,区别的只在于芯片供应商提供的SDK开发包,两家公司的SDK离产品都有一定的距离,但是linux的网络开发并不是一个技术难点,所以并不影响产品的推广。 作为IPNC的解决方案,在720P时代,海思的解决方案相对于TI的解决方案,其优势是支持了编解码算法,而TI只支持了MPEG4的编解码算法。虽然在2008年初,MPEG4的劣势在市场上已经开始体现出来,但在当时这似乎并不影响DM355的推广。 对于最高支持的图像抓拍分辨率,海思的解决方案可以支持支持JPEG抓拍3M Pixels@5fps,DM355最高可以支持5M Pixels,虽然当时没有成功的开发成5M Pixel的抓拍(内存分配得有点儿问题,后来就不折腾了),但是至少4M Pixel 的抓拍是实现了的,而且有几个朋友已经实现了2560x1920这个接近5M Pixel 的抓拍,所以在这一点上DM355稍微胜出。 因为在高清分辨率下,CCD传感器非常昂贵,而CMOS传感器像原尺寸又做不大,导致本身在低照度下就性能欠佳的CMOS传感器的成像质量在高分辨率时变差,
数控 数显 硬件脉冲环形分配器的设计 河北省农业工程学校 孙继山 在对一台数控机床维修中,发现其步进电动机 的环形分配器损坏,在原配件买不到的情况下,我用 D触发器和与非门电路进行代换,取得了成功。下 面将电路设计过程作一介绍。 1.根据电机的相数,选择D触发器的数量。一 个触发器控制步进电动机的一相。我们所用的步进 电动机是三相电动机,需用三个D触发器,分别用 F A、F B、F C表示。其状态分别用Q A、Q B、Q C表示。 2.根据步进电动机的通电方式,列出带方向控 制的真值表。三相步进电动机的通电方式有三相单 三拍、三相双三拍和三相单双六拍。由原电路集成 块YB013的3、4接高电平说明其工作在单双六拍。 用D作为方向控制,D=1电机正转、D=0电机反 转。列出的真值表如表1。 表1 真值表 D Q A N Q B N Q C N Q A N+1Q B N+1Q C N+1 1100110 1110010 1010011 1011011 1001101 1101100 0100101 0101001 0001011 0011010 0010110 0110100 3.根据真值表,利用卡诺图得每个触发器的次 态方程。以F A为例,画出卡诺图,由真值表添入数 值后结果如图1。 D Q A n Q B n Q C n000111 10 00x0 01 0110x1 1111x0 10x100 图1 卡诺图 经化简得: Q A n+1=D Q C n+DQ B n=D Q C n D Q B n Q B n+1和Q C n+1可用同样方法得出。也可根据三相电路的对称性,由Q A n+1的表达式推出: Q B n+1=D Q C n D Q B n Q C n+1=D Q B n DQ A n 4.对照D触发器的特性方程:Q n+1=D,得到每个触发器的驱动方程: D A=D Q C n D Q B n D B=D Q A n D Q C n D C=D Q B n D Q A n 5.由驱动方程画出脉冲分配器电路如图2。 图2 脉冲分配器电路 图3 原电路接线图 6.应用:原电路接线如图3所示。图中8031单片机用P1口的三根口线P1 0、P1 1、P1 2实现对环分电路的控制,其中: P1 0:方向控制输出端,接至代换电路的D端。 P1 1:输出控制信号,可用其封锁代换电路的CP 脉冲。 P1 2:环分电路复位控制,接至代换电路的R。代换电路的CP脉冲直接接8155定时器的定时输出。 (收稿日期:2000-12-15) ! 11 ! 数控 数显 机床电器2001No.6
硬件电路板设计规范(总36 页) -CAL-FENGHAI.-(YICAI)-Company One1 -CAL-本页仅作为文档封面,使用请直接删除
0目录 0目录............................................... 错误!未定义书签。
1概述............................................... 错误!未定义书签。 适用范围............................................ 错误!未定义书签。 参考标准或资料 ...................................... 错误!未定义书签。 目的................................................ 错误!未定义书签。2PCB设计任务的受理和计划............................ 错误!未定义书签。 PCB设计任务的受理................................... 错误!未定义书签。 理解设计要求并制定设计计划 .......................... 错误!未定义书签。3规范内容........................................... 错误!未定义书签。 基本术语定义........................................ 错误!未定义书签。 PCB板材要求: ....................................... 错误!未定义书签。 元件库制作要求 ...................................... 错误!未定义书签。 原理图元件库管理规范:......................... 错误!未定义书签。 PCB封装库管理规范............................. 错误!未定义书签。 原理图绘制规范 ...................................... 错误!未定义书签。 PCB设计前的准备..................................... 错误!未定义书签。 创建网络表..................................... 错误!未定义书签。 创建PCB板..................................... 错误!未定义书签。 布局规范............................................ 错误!未定义书签。 布局操作的基本原则............................. 错误!未定义书签。 热设计要求..................................... 错误!未定义书签。 基本布局具体要求............................... 错误!未定义书签。 布线要求............................................ 错误!未定义书签。 布线基本要求................................... 错误!未定义书签。 安规要求....................................... 错误!未定义书签。 丝印要求............................................ 错误!未定义书签。 可测试性要求........................................ 错误!未定义书签。 PCB成板要求......................................... 错误!未定义书签。
纳秒级脉冲电源的研究与设计 随着脉冲功率技术在军事、医疗、环保等领域的快速发展,对于大功率脉冲电源的上升沿宽度要求日益提高,高功率快脉冲也逐渐成为脉冲功率技术的研究热点和发展趋势。而如何以较低的成本在提高脉冲电源电压等级的同时陡化脉冲宽度也是研究的难点之一。 以高压快脉冲为技术核心,以小型化、高重频和高效率为发展方向,本论文提出了一种低成本对称式的脉冲发生拓扑,同时以磁压缩技术陡化脉冲宽度,并深入研究了磁开关的控制技术,以实现高稳定性的纳秒级脉冲电源的研制,论文主要内容分为以下三个部分:1、提出了一种具有对称串联结构的高压脉冲电源拓扑,大幅降低成本;基于这种新型的高压脉冲电源拓扑,分析并初步验证了各种工作环境下的可行性。搭建了该高压脉冲电源的仿真模型,仿真验证了在正常运行和发生闪络等不同状态下电路的工作原理。 在实验室完成了该高压脉冲电源的研制,实验验证了在正常运行和发生闪络等不同状态下对于电路的分析,并在实际应用中证明了该拓扑相对于现有研究的优越性。2、介绍了脉冲磁压缩技术的工作原理,分析了各个磁芯参数对磁开关性能的影响,基于此,确定了磁芯材料的选择,并搭建了磁芯检测平台测量磁芯的磁滞曲线,对比了不同磁芯材料的区别。 基于脉冲电源体积小型化原则,分析了影响磁开关体积的因素,并利用数学模型确定了磁开关参数的最优解。系统地分析了磁复位原理以及磁复位电路与脉冲电源的匹配问题。 最后搭建了30kV/3kW的纳秒级脉冲电源样机,验证了磁复位原理的可行性,以及在高压大功率应用场合可能遇到的问题及其解决方案。3、针对电流型磁复
位方式存在的不足,指出了对于磁开关控制的必要性,并系统地分析了磁开关控制原理,提出了相应的控制方案。 最后基于PLECS软件搭建了35kV的纳秒级脉冲电源的仿真模型,通过仿真验证了控制方案的可行性和稳定性,并从实际应用角度分析了磁开关的最佳工作区间。
硬件电路板设计规范 制定此《规范》的目的和出发点是为了培养硬件开发人员严谨、务实的工作作风和严肃、认真的工作态度,增强硬件开发人员的责任感和使命感,提高工作效率和开发成功率,保证产品质量。 1、深入理解设计需求,从需求中整理出电路功能模块和性能指标要求; 2、根据功能和性能需求制定总体设计方案,对CPU等主芯片进行选型,CPU 选型有以下几点要求: 1)容易采购,性价比高; 2)容易开发:体现在硬件调试工具种类多,参考设计多,软件资源丰富,成功案例多; 3)可扩展性好; 3、针对已经选定的CPU芯片,选择一个与我们需求比较接近的成功参考设计。 一般CPU生产商或他们的合作方都会对每款CPU芯片做若干开发板进行验证,厂家最后公开给用户的参考设计图虽说不是产品级的东西,也应该是经过严格验证的,否则也会影响到他们的芯片推广应用,纵然参考设计的外围电路有可推敲的地方,CPU本身的管脚连接使用方法也绝对是值得我们信赖的,当然如果万一出现多个参考设计某些管脚连接方式不同,可以细读CPU芯片手册和勘误表,或者找厂商确认;另外在设计之前,最好我们能外借或者购买一块选定的参考板进
行软件验证,如果没问题那么硬件参考设计也是可以信赖的;但要注意一点,现在很多CPU都有若干种启动模式,我们要选一种最适合的启动模式,或者做成兼容设计; 4、根据需求对外设功能模块进行元器件选型,元器件选型应该遵守以下原则: 1)普遍性原则:所选的元器件要被广泛使用验证过的尽量少使用冷、偏芯片,减少风险; 2)高性价比原则:在功能、性能、使用率都相近的情况下,尽量选择价格比较好的元器件,减少成本; 3)采购方便原则:尽量选择容易买到,供货周期短的元器件; 4)持续发展原则:尽量选择在可预见的时间内不会停产的元器件; 5)可替代原则:尽量选择pin to pin兼容种类比较多的元器件; 6)向上兼容原则:尽量选择以前老产品用过的元器件; 7)资源节约原则:尽量用上元器件的全部功能和管脚; 5、对选定的CPU参考设计原理图外围电路进行修改,修改时对于每个功能模块都要找至少3个相同外围芯片的成功参考设计,如果找到的参考设计连接方法都是完全一样的,那么基本可以放心参照设计,但即使只有一个参考设计与其他的不一样,也不能简单地少数服从多数,而是要细读芯片数据手册,深入理解那些管脚含义,多方讨论,联系芯片厂技术支持,最终确定科学、正确的连接方式,如果仍有疑义,可以做兼容设计;当然,如果所采用的成功参考设计已经是
步进电机论文:五相混合式步进电动机环形分配器的设计 2012年1月21日 五相混合式步进电机环形分配器的设计 徐殿国王宗培(哈尔滨工业大学) l引言 五相混合式步进电机具有许多优良的性能,因此在国内外都得到了较大发展,其驱动技术也取得了很大进步[1]。由于五相混合式步进电动机系统的研制和开发历史不长,电机驱动电源中的环形脉冲分配器专用芯片目前尚未见到,国内外厂家生产的五相混合式步进电动机驱动电源中的环形脉冲分配器大都是由数字逻辑集成电路或EPROM存贮器构成的[2.3]。由于电机的运行节拍和运行方式较多,采用这些方式设计的环形脉冲分配器结构复杂、功能较少、可靠性不高。近年来随着逻辑可编程器件的出现,为逻辑电路的设计提供了极大的灵活性,因此完全可以用逻辑可编程器件(例如PAL、GAL等)设计步进电动机的环形脉冲分配器。本文给出由两片GAL16V8构成的五相混合式步进电动机环形脉冲分配器的设计方法。 2五相混合式步进电机的励磁方式及环形脉冲分配逻辑 根据五相混合式步进电机韵工作原理,可以得到如表1所示的励磁方式。可见五相混合式步进电机的励磁方式很多,但是运行节拍只有两种即整步10拍和半步20拍。尽管该电机的励磁方式很多,但从电机运行的平稳陛和获得最大合成转矩的角庋出发,表1五相混合式步进电动
机的励磁方式常采用4-4相通电方式作为整步运行方式,4-5相通电方式作为半步运行方式。整步运行方式中的5-5相通电方式虽较4-4相通电方式的合成转矩大,但由于驱动电源中采用桥式电路时存在上下桥臂换向容易引起短路而较少采用。本文给出的是4-4相通电方式和5-5相通电方式的环形脉冲分配器设计方法。 根据五相混合式步进电机的合成转矩矢量图[4],可以得到4-5相励磁方式和4-4相励磁方式下的逻辑通电状态变化顺序,如表2所示。与之对应的功放电路形式如图1所示。表2中的“1”代表功率管导通,“0”代表功率管关断。其中正转的逻辑通电状态变化顺序 为。 表2中序号为奇数的逻辑通电状态即为4-4相励磁方式。
步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器)L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可
2系统方案设计 2.1 数字示波器的工作原理 图2.1 数字示波器显示原理 数字示波器的工作原理可以用图2.1 来描述,当输入被测信号从无源探头进入到数字示波器,首先通过的是示波器的信号调理模块,由于后续的A/D模数转换器对其测量电压有一个规定的量程范围,所以,示波器的信号调理模块就是负责对输入信号的预先处理,通过放大器放大或者通过衰减网络衰减到一定合适的幅度,然后才进入A/D转换器。在这一阶段,微控制器可设置放大和衰减的倍数来让用户选择调整信号的幅度和位置范围。 在A/D采样模块阶段,信号实时在离散点采样,采样位置的信号电压转换为数字值,而这些数字值成为采样点。该处理过程称为信号数字化。A/D采样的采样时钟决定了ADC采样的频度。该速率被称为采样速率,表示为样值每秒(S/s)。A/D模数转换器最终将输入信号转换为二进制数据,传送给捕获存储区。 因为处理器的速度跟不上高速A/D模数转换器的转换速度,所以在两者之间需要添加一个高速缓存,明显,这里捕获存储区就是充当高速缓存的角色。来自ADC的采样点存储在捕获存储区,叫做波形点。几个采样点可以组成一个波形点,波形点共同组成一条波形记录,创建一条波形记录的波形点的数量称为记录长度。捕获存储区内部还应包括一个触发系统,触发系统决定记录的起始和终止点。 被测的模拟信号在显示之前要通过微处理器的处理,微处理器处理信号,包括获取信号的电压峰峰值、有效值、周期、频率、上升时间、相位、延迟、占空比、均方值等信息,然后调整显示运行。最后,信号通过显示器的显存显示在屏幕上。 2.2 数字示波器的重要技术指标 (1)频带宽度 当示波器输入不同频率的等幅正弦信号时,屏幕上显示的信号幅度下降3dB 所对应的输入信号上、下限频率之差,称为示波器的频带宽度,单位为MHz或GHz。
基于SiC MOSFET的纳秒级脉冲电源研制 脉冲功率技术广泛应用于军事、环境保护、生物技术等领域,比如脱硫脱硝、脉冲杀菌、激光管驱动、阴极射线管扫描电路等。传统脉冲电源的主放电开关主要以真空弧光放电管、氢闸流管、火花隙为主,存在成本高、寿命短、外围电路复杂等缺点。 随着电力电子技术的发展,功率MOSFET和IGBT的性能越来越高,众多研究学者利用MOSFET或IGBT串并联组成高压固态开关替代传统放电开关,进而设计出纳秒级上升沿的高重复频率脉冲发生器。本文以SiC MOSFET为核心功率器件,设计了一台纳秒级脉冲电源,电源主要技术指标为:输出脉冲峰值可调范围为 0~30kV,脉冲重复频率为10Hz~1kHz可调,最大输出电流为80A,脉冲上升时间小于100ns。 本论文的主要工作如下:设计了纳秒脉冲电源的拓扑结构,主电路采用三级Marx发生器结构,研究了SiC MOSFET串联开关的静态和动态电压不均衡机制,给出了影响SiC MOSFET串联均压的关键因素。针对静态均压电路的特性,明确了均压电阻的设计方法,对于动态均压电路,采用负载侧RCD电路作为均压措施,并确定了相应参数的选取依据。 对比分析了正激式驱动、半桥驱动、反激驱动三种驱动方式的优缺点,确定采用半桥驱动的方式作为SiC MOSFET的串联驱动电路,该电路的隔离强度高、驱动电路设计方便,其驱动变压器的原边和副边绕组匝数均为1匝,可减少其分布参数的影响。通过实验测试了驱动电路的同步性,其驱动的延迟时间差异小于 10ns,同步性良好。 采用Microchip公司的dsPIC33FJl28MC706作为主控制芯片,整个控制系统
课程数控实验 题目基于LPC2114的直流电机控制系统学院信息工程学院 专业13计算机测控 学号3113002316、3113002317、 3113002318、3113002319 姓名谢志鹏、杨光、叶国康、曾晖
基于LPC2114的步进电机控制器 一.实验要求 1.用一片LPC2000处理器或单片机设计步进电机驱动器,实现脉冲环形分配器和放大驱动电路功能,驱动步进电机运行。 2.用另外一片LPC2000处理器设计数控系统,设置步进电机步进运动方向选择开关、电位器输入步进运动速度、键盘输入步进运动步数,设置运动脉冲和方向信号输出给步进电机驱动器,实现对步进电机的运动控制信号给定。 二.实验原理 1.LPC2103部分(步进电机驱动部分): (1)脉冲输入:利用LPC2103芯片的脉宽调制器(PWM)产生占空比为50%的方波信号。 (2)正反转:把L297的CW/CCW接到LPC2103的一个引脚,通过控制该引脚电平的高低即可实现控制电机正反转。 (3)步进步数控制:把步进电机控制器的定时器0设置成捕获计数模式,当捕获到一个脉冲时,TC 加1,直到TC等于给定步数时,停止方波输出。 2.LPC2114(信号输入部分) (1)步进运动速度输入:通过调节电位器,再经过LPC2114的AD转换,得到电位器触点的电压值。将电压值按照一定的比例换算成速度值,通过串口发送到LPC2103(步进电机控制器),以改变方波的频率。 (2)步进步数输入:通过键盘输入步进步数,将结果通过串口发送到LPC2103(步进电机控制器)。
三.硬件电路 图3.1 电路图 L297是步进电机控制器,适用于双极性两相步进电机或单极性四相步进电机的控制,可有半步、整步和波状三种驱动模式。片内斩波电路允许开关式控制绕组电流。该器件的一个显著特点是仅需时钟、方向和模式输入信号。步进电机所需相位由电路内部产生,大大减轻了的负担。 L297的引脚端功能如下: ◆引脚端10(使能端EN)为芯片的片选信号,高电平有效; ◆引脚端20(复位RST),低电平有效; ◆引脚端19(HALF/FULL)和引脚端17(CW/CCW)都通过上拉电阻链接到高电平; ◆引脚端18(时钟输入CLK)的最大输入时钟频率不能超过5KHz,控制时钟的频率,即可控制电机转 动速率; ◆引脚端19(HALF/FULL)决定电机的转动方式,HALF/FULL=0,电机按整步方式运转,HALF/FULL=1,
编制基于MCS51系列单片机汇编语言的能够实现3相6拍软件环形分配器正反转运行功能的程序。 正反转的识别由开关K7识别,设K7连接8031的P1.7,而三相电机的A、B、C通电状态由P1.0、P1.1、P1.2三条口线控制。 开关K7闭合,P1.7=1, 接正转,实现:A→AB→B→BC→C→CA→A 开关K7断开,P1.7=0, 接反转,实现:A→AC→C→CB→B→BA→A 硬件电路如图: ORG 0000H SJMP START ORG 0030H TABLE: DB 01H DB 03H DB 02H DB 06H DB 04H DB 05H ORG 0040H START:MOV SP, #60H SETB P1.7 JB P1.7, ZZH SJMP FZH ZZH: MOV DPTR, #TABLE
MOV R0, #0H LOOP1: MOV A, R0 MOVC A, @A+DPTR ORL P1, A ACALL DELAY CJNE R0, #05H, NEXT1 MOV R0, #0H SJMP LOOP1 NEXT1: INC R0 SJMP LOOP1 FZH: MOV DPTR, #TABLE MOV R0, #0H LOOP2: MOV A, R0 MOVC A, @A+DPTR ORL P1, A ACALL DELAY CJNE R0, #0H, NEXT2 MOV R0, #05H SJMP LOOP2 NEXT2: DEC R0 SJMP LOOP2 DELAY: MOV R7, #10H
DELAY1: MOV R6, #0FFH DELAY2: MOV R5, #0FFH DELAY3: DJNZ R5, DELAY3 DJNZ R6, DELAY2 DJNZ R7, DELAY1 RET END
单片机应用设计
概述 单片机是一种大规模的具有计算机基本功能的单片 单片机是一种大规模的具有计算机基本功能的单片集成电路。可以与少量外围电路构成一个小而完善的计算机系统。芯片内置和外围的电路能在软件的控制下准确、迅速、高效地完成程序设计者事先规定的任务。 单片机具有体积小、功耗低、控制功能强、扩 单片机具有体积小、功耗低、控制功能强、扩展灵活、使用方便等优点,广泛应用于仪器仪表、家用电器、医用设备、航空航天、通信产品、智能玩具、汽车电子、专用设备的智能化管理及过程控制等领域。 制等领域。
单片机类型 集中指令集(CISC)和精简指令集(RISC)–采用CISC结构的单片机数据线和指令线分时复 用,即所谓冯.诺伊曼结构。它的指令丰富,功 能较强,但取指令和取数据不能同时进行,速度 受限,价格亦高。 –采用RISC结构的单片机,数据线和指令线分离 ,即所谓哈佛结构。这使得取指令和取数据可同 时进行,且由于一般指令线宽于数据线,使其指 令较同类CISC单片机指令包含更多的处理信息 ,执行效率更高,速度亦更快。同时,这种单片 机指令多为单字节,程序存储器的空间利用率大 大提高,有利于实现超小型化。
常用的几个系列单片机 MCS-51及其兼容系列: –英特尔公司的MCS-51系列单片机是目前应 用最广泛的8位单片机之一,并且ATMEL、 PHILIPS、ADI、MAXIM、LG、 SIEMENS等公司都有其兼容型号的芯片。 这个系列的单片机具有运算与寻址能力强, 存储空间大,片内集成外设丰富,功耗低等 优点,其中大部分兼容芯片都含有片内 FLASH程序存储器,价格便宜。适合应用于 仪器仪表、测控系统、嵌入系统等开发。
环形脉冲分配器教案精 选文档 TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-
A、导入新课 实物演示:演示环形脉冲分配器的电路功能,提出本次学习的任务,激发学生的兴趣。 B、新授课 7、1 环形脉冲分配器 基础知识 一、概述 按照逻辑功能和电路组成的不同,数字电子电路分成组合逻辑电路和时序逻辑电路两大类。本任务将介绍时序逻辑电路。 时序逻辑电路是由组合逻辑电路和存储电路两部分组成,其方框图如图7-1所示。 图7-1 时序逻辑电路组成 时序逻辑电路的特点是:电路在任一时刻的输出状态不仅与该时刻输入信号状态有关,而且还与电路原有的状态有关。(如:指纹开门) 时序逻辑电路按状态转换情况可分为同步时序逻辑电路和异步时序逻辑电路两大类。 同步时序逻辑电路是指在同一时钟脉冲CP的控制下,电路中所有触发器Q的状态都在同一时刻发生改变。而异步时序逻辑电路是在时钟脉冲CP 的控制下,各触发器Q的状态改变不在同一时刻发生。 最常用的时序逻辑电路是各种类型的寄存器和计数器。 寄存器 (一)概述 寄存器是常用于接收、暂存、传递数码及指令等信息的数字逻辑部件。 寄存器存放数码及指令等信息的方式有并行输入和串行输入两种: ⑴并行输入——数码及指令等信息从各对应位置的输入端同时输入到寄存器中。 ⑵串行输入——数码及指令等信息从一个输入端逐位输入到寄存器中。 寄存器传递数码及指令等信息的方式也有并行输出和串行输出两种: ⑴并行输出——数码及指令等信息同时出现在各对应位置的寄存器的输出端。 ⑵串行输出——数码及指令等信息在一个寄存器的输出端逐位出现。 寄存器分为数码寄存器和移位寄存器: ⑴数码寄存器——用于暂时存放数码的逻辑记忆电路。 ⑵移位寄存器——除具有存放数码的记忆功能外,还具有移位功能。(二)、数码寄存器演示法(结合演示讲解)举例法图片解释(结合演示讲解)连接线路 功能测试(结合演示讲解)连接与调试
10.2 步进电动机位置控制系统 10.2.2 步进电动机的脉冲分配电路 1. 硬件脉冲分配器电路 步进电动机的脉冲分配可以由硬件和软件两种方法来实现。硬件环形分配器需要根据步进电动机的相数和要求的通电方式而设计专门的电路,图10.6所示为一个三相六拍的环形分配器。 分配器的主体是三个J-K触发器。三个J-K触发器的Q输出端分别经各自的功放线路与步进电动机A、B、C三相绕组连接。当QA=1时,A相绕组通电;QB=1时,B 相绕组通电;QC=1时,C相绕组通电。DR+和DR-是步进电动机的正反转控制信号。 正转时,各相通电顺序:A-AB-B-BC-C-CA 反转时,各相通电顺序:A-AC-C-CB-B-BA 图10.6 三相六拍环形分配器 图10.6所示为的三相六拍环形分配器逻辑真值表如表10.1所示。
表10.1 三相六拍环形分配器逻辑真值表 2. 软件脉冲分配 对于不同的计算机和接口器件,软件环分有不同的形式,现以AT89C51单片机配置的系统为例加以说明。 (1)由P1口作为驱动电路的接口 控制脉冲经AT89C51的并行I/O接口P1口输出到步进电动机各相的功率放大器输入,设P1口的P1.0输出至A相,P1.1输出至B相,P1.2输出至C相。 (2)建立环形分配表 为了使电动机按照如前所述顺序通电,首先必须在存储器中建立一个环形分配表,存储器各单元中存放对应绕组通电的顺序数值,如表10.2所示。当运行时,依次将环形分配表中的数据,也就是对应存储器单元的内容送到P1口,使P1.0、P1.1、P1.2依次送出有关信号,从而使电动机轮流通电。 表10.2 三相六拍软件环形分配数据表
献给那些刚开始或即将开始设计硬件电路的人。时光飞逝,离俺最初画第一块电路已有3年。刚刚开始接触电路板的时候,与你一样,俺充满了疑惑同时又带着些兴奋。在网上许多关于硬件电路的经验、知识让人目不暇接。像信号完整性,EMI,PS设计准会把你搞晕。别急,一切要慢慢来。 1)总体思路。 设计硬件电路,大的框架和架构要搞清楚,但要做到这一点还真不容易。有些大框架也许自己的老板、老师已经想好,自己只是把思路具体实现;但也有些要自己设计框架的,那就要搞清楚要实现什么功能,然后找找有否能实现同样或相似功能的参考电路板(要懂得尽量利用他人的成果,越是有经验的工程师越会懂得借鉴他人的成果)。 2)理解电路。 如果你找到了的参考设计,那么恭喜你,你可以节约很多时间了(包括前期设计和后期调试)。马上就copy?NO,还是先看懂理解了再说,一方面能提高我们的电路理解能力,而且能避免设计中的错误。 3)没有找到参考设计? 没关系。先确定大IC芯片,找datasheet,看其关键参数是否符合自己的要求,哪些才是自己需要的关键参数,以及能否看懂这些关键参数,都是硬件工程师的能力的体现,这也需要长期地慢慢地积累。这期间,要善于提问,因为自己不懂的东西,别人往往一句话就能点醒你,尤其是硬件设计。 4)硬件电路设计主要是三个部分,原理图,pcb,物料清单(BOM)表。 原理图设计就是将前面的思路转化为电路原理图。它很像我们教科书上的电路图。pcb涉及到实际的电路板,它根据原理图转化而来的网表(网表是沟通原理图和pcb之间的桥梁),而将具体的元器件的封装放置(布局)在电路板上,然后根据飞线(也叫预拉线)连接其电信号(布线)。完成了pcb布局布线后,要用到哪些元器件应该有所归纳,所以我们将用到BOM表。 5)用什么工具? Protel,也就是altimuml容易上手,在国内也比较流行,应付一般的工作已经足够,适合初入门的设计者使用。 6)to be continued......
自动化学院 本科毕业设计(论文)题目:纳秒脉冲电源硬件设计
摘要 脉冲电源有单正脉冲和双正、负脉冲电源,采用独特的调制技术,数字化控制,是高频开关电源技术的进一步发展与创新,在很多行业领域得到了广泛的应用。提高脉冲频率和电源效率是其主要的发展方向。而本设计文主要用单片机STC89C51作为微控制器和可编程逻辑器件CPLD EPM7160STC100-10,通过对CPLD 的编程实现对脉冲的调节。其中电源的控制主要有CPLD来完成,CPLD负责对脉冲宽度、脉冲间隔进行控制,把控制信息传递给下一级。其中CPLD的输入端可以由键盘输入也可以由计算机进行控制。这样就可以利用模块化设计的方法对电源硬件模块进行设计,开发出了全新的数字化的纳秒双脉冲电源,电压在0-15V,脉冲频率10M以上最小脉宽10ns。并运用Quartus对脉冲波形进行仿真,结果表明该电源完全符合设计的要求。 关键词:纳秒脉冲;脉冲电源; CPLD
ABSTRACT Pulse power with a single positive pulse and double positive, negative pulse power,Unique modulation technique,digital control, Further development and innovation of high-frequency switching power supply technology, In many industries has been widely applied. Improve the pulse frequency and power efficiency is the main direction of development. The text of this design is mainly used as a single-chip microcontroller STC89C51 and Programmable logic device CPLD EPM7160STC100, By programming the CPLD realize the pulse of the regulation. Which controls the power supply to complete the main CPLD, CPLD is responsible for the pulse width, the pulse interval are controlled. The control information is passed to the next level. CPLD inputs which can be entered from the keyboard can also be controlled by the computer. This method can be used for modular design of the power supply design of hardware modules, Developed a new digital dual-nanosecond pulse power, a voltage of 0 to 15V, pulse frequency than 10M,and the minimum pulse width 10ns. And the use of a pulse waveform simulation Quartus, The results show that the power supply is fully consistent with the design requirements. Keywords nanosecond pulse ; pulse power supply; CPLD