包装工程 P A CK A GIN G EN G IN EERI NG Vo l. 32N o. 92011. 05
66
收稿日期:2011 03 01
基金项目:湖北省自然科学基金项目(2009CDB313 ; 湖北省教育厅项目(Q 20091404
作者简介:钟飞(1970- , 男, 武汉人, 硕士, 湖北工业大学副教授, 主要研究方向为包装过程检测与控制。
基于结构光和机器视觉的尺寸测量及其误差分析
钟飞, 吴雪茹
(湖北工业大学, 武汉430068
摘要:为了解决流水线上产品的尺寸自动测量难的问题, 基于目前机器视觉在尺寸测量方面的应用, 介绍了用机器视觉来检测线圈绕线质量的方案。采用简化了的针孔模型对相机进行标定, 并针对CCD 成像元的不均匀性, 提出改进方案并对测量结果进行误差修正, 通过实验完善并验证了该方案的可行性, 为机器视觉测量尺寸提供理论基础。
关键词:误差分析; 机器视觉; CCD; 结构光
中图分类号:T B486; T B487 文献标识码:A 文章编号:1001 3563(2011 09 0066 04
Size M e asure me nt and Error Analysis of Machine Visio n Base d on Structured Light
ZH ON G F ei, W U X ue ru
(H ubei U niver sity o f T echnolog y, Wuhan 430068, China
Ab stract:A project o f using machine vision to detect the quality of coil w inding was intro duced based o n cur rent applicatio n o f machine vision in size measurement to solve the difficulty of measur ing pro duct size on product ion line. A simplified pinho le mo del was applied t o calibr ate camer a. Impr ovement method to co rr ect measurement er ror was put forw ar d to so lv e the no nunifor mity pro blem of CCD imag ing unit. T he feasibilit y o f the method w as v erif ied. T he pur po se w as to pro vide reference for size measurement by machine vision. Key word s:erro r analysis; machine visio n; CCD ; structured lig ht
在自动化进展迅速的流水线生产领域, 需要不断开发出各种自动测量装置, 然后向中心处理装置输入单件产品的各种数据。从测量技术方面看, 自动测量物件的外形尺寸和体积是该领域的难点, 在计算批量产品的仓储容量从而进行有效地包装运输以及存放时, 该技术就成为了一门关键技术。文中研究的视觉测量系统适用于非接触式以及各种图像传感的在线监测, 不但解决了流水线领域的产品尺寸在线测量, 近年来在包装印刷领域对比较精细印刷品进行监测控制方面得到了广泛的应用[1]。在诸多的视觉方法中, 结构光三维视觉还扩展了大量程、大视场、较高精度、光条图像信息的易于提取、实时性强及主动受控等特点。
CCD 电荷耦合器件于1969年在贝尔实验室研制成功以后, 由日商开始量产, 其发展过程历经30多
年。由于其具有高灵敏度、低噪声、长寿命、低功耗和高可靠性等优点, 得到了广泛应用。CCD 的几何精度高, 像素间距小, 如果配置适当的光学系统, 就可以获得很高的分辨率。结构光视觉方法的研究最早出现于20世纪70年代。为了得到产品某一方面的特征信息, 在CCD 的图像传感技术上结合结构光来得到可以更加明确的图像信息, 一定意义上改进了成像质量。
文中设计了一套基于CCD 以及结构光的机器视觉测量系统, 通过提取经CCD 成像后图像的清晰边缘, 对测量结果进行拟合, 以获得被测物边缘的准确信息; 同时
通过概率论知识使用数据处理的手段来进行误差修正, 从而提高了测量精度。其中相机的标定技术是整个系统研究的理论基础和核心内容。
钟飞等基于结构光和机器视觉的尺寸测量及其误差分析
67
1 CCD 工作原理
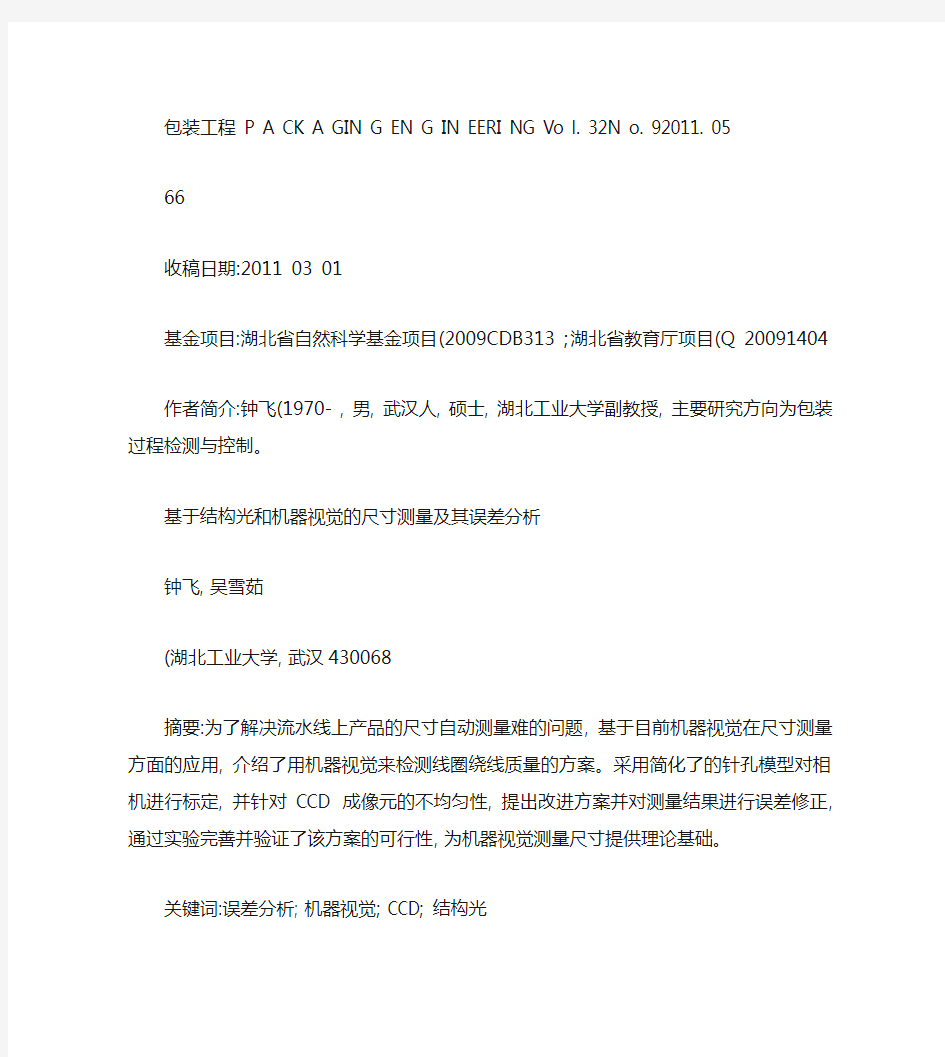
机器视觉中, 相机标定常用的相机模型有:针孔模型、正交投影模型及拟透视投影模型[2]。其中针孔模型是最常用的相机模型, 在大多数场合下可以满足要求。针孔成像模型见图1, 其中:X c Y c Z c 为相机坐标系; X Y
为物理坐标系。
图1 CCD 相机的针孔模型F ig. 1Pin hole model of CCD camera
图中:像点坐标为X Y
-f
; 投影中心坐标为0 00
;
P 点坐标为X c
Y c Z c
。
由于像点投影中心和P 点在同一条直线上, 根据几何关系有:
X Y -
f
-0
=
0-X c
Y c Z c
, 展开得:k =f =
c
f X =-c k =f
c
z Y =-c k =f c z c
由公式可以看出像点与物体点之间是一个非线性的关系, 将以上公式用齐次坐标表示:
w X Y 1
=f 000f 000
1
x c y c z c 1
于是, 可得相机的线性针孔模型(其中(u 0, v 0 为
像面中心 :
w
v =
dX 0u 0
0d Y v 0
1
f 000f 000
1
t X w Y w Z w 1=f x 0u 00f y v 000
1
t X w
Y w Z w 1
2 方案设计及实验结果分析
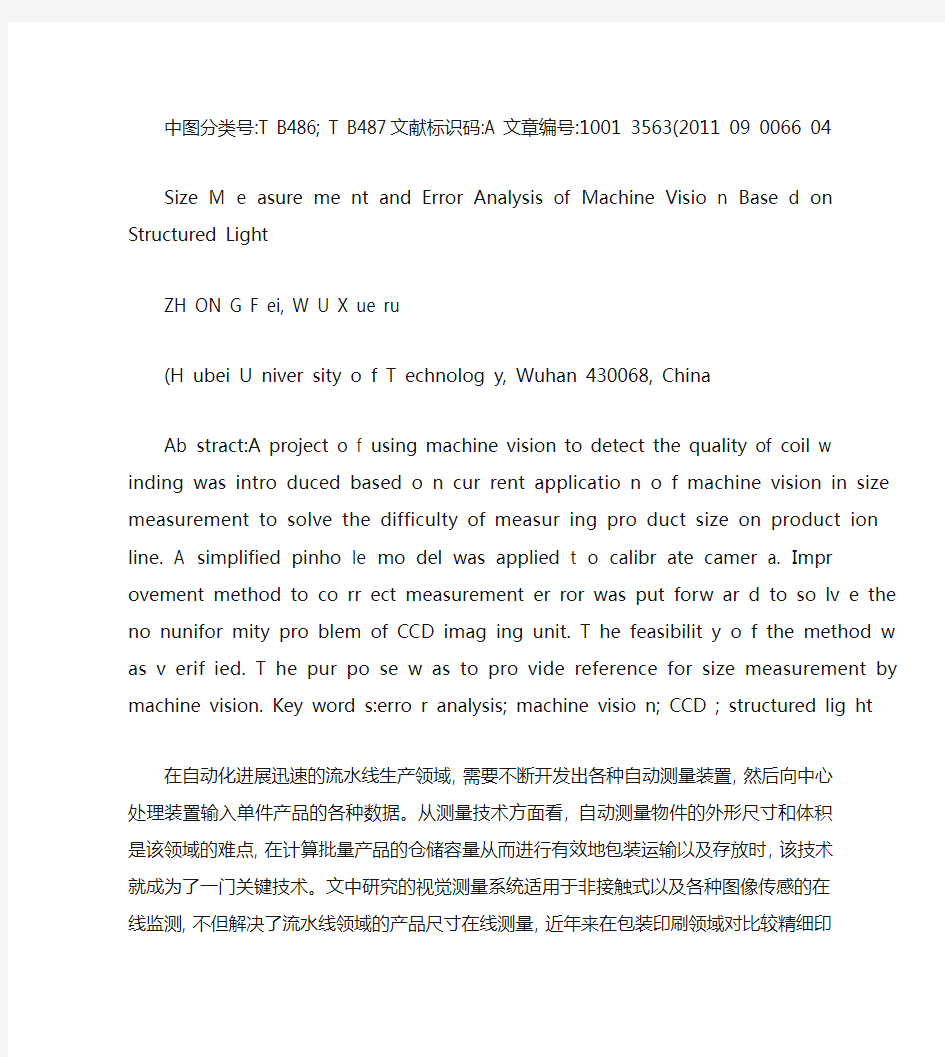
根据现有的机器视觉理论, 详细分析了CCD 对图像的采集理论, 优化设计了整个测量系统的关键参
数, 测量系统见图2。激光器与CCD 相机成一定角度
图2 CCD 相机测量系统
F ig. 2M easuring system based on CCD camer a
放置, 角度根据现场测量条件而定, 相机接收到带有被测目标特征信息的图像, 经由图像采集卡送给计算机[3]
。为了研究其误差精度, 使用了相机标定的简化模型, 使得运算过程较之针孔模型更加简便, 并且更加切合实际测量过程。2. 1 实验数据
测量步骤如下:将光刻尺与标定板间隔放置, 将相机与光源固定在平台相对位置上, 开机调整相机参数以及各测量部件间的几何参数, 在成像最清晰时开始测量; 分别在物距为390, 392, 394, 396, 398mm, 以此类推直到410mm 处各取一张测量图, 依次标号保存; 打开机器视觉软件hex sig ht, 分别测取各物距下
包装工程 P A CK A GIN G EN G IN EERI NG Vo l. 32N o. 92011. 05
68
各间隔所占像素差值[4]
; 对数据进行整理, 为后续数据处理做准备。实际测量过程中标定样件见图3 。
图3 标定样件Fig. 3Calibr ation sample
2. 2 测量误差分析
CCD 上感光组件的表面具有储存电荷的能力, 并以矩阵的方式排列。当其表面感受到光线时, 会将电荷反应在组件上, 整个CCD 上的所有感光组件所
产生的信号, 就构成了一个完整的画面[5]
。然而, 图像之间会存在不均匀性, 造成这种不均匀性的因素十分复杂, 常规算法一般无法将所有因素都考虑到, 影响了其校正效果。实验根据CCD 的不均匀性, 判断其产生根源, 提出比较有效的标定方案。像素差值经过hex sight 测量得到, 可得的原始数据见表1(其中物距及测量尺寸单位为mm 。
由公式l =kp 得到各间距之间的测量均值为:=n (l 1+l 2+l 3+ +l n =n
n
i =1
l
i
用测量值减去平均值可得残余误差 i (见表2 , 用 i 可以计算出标准偏差 , 而标准偏差为评定随机误差的尺度。由公式:
=
1
i
2
1
可得各测量结果的残余误差见表2。
表1 在不同物距下测得的各尺寸像素差值(像素
Tab. 1M easurements of p ixel value of diffe ren t size u nder differen t object distan ce
间距物距/mm
70~7570~8070~8570~9070~9570~10070~10570~110390
148. 132295. 046443. 151591. 594740. 01888. 2171036. 3081184. 307392147. 477294. 068441. 484589. 191737. 016884. 5541031. 8871179. 094394146. 607292. 851439. 392586. 564733. 389880. 5851027. 1571173. 938396146. 132291. 548437. 721583. 952730. 224876. 5571022. 711168. 778398145. 536290. 173435. 629581.
217726. 847872. 5231018. 2491163. 679400145. 116288. 739433. 627578. 557723. 532868. 6491013. 8691158. 196402144.
192
287. 725431. 888576.
363
721.
08
865. 2571009.
49
1153. 507
404143. 723286. 285430. 02573. 805717. 655861. 451004. 8031148. 36406143. 146284. 982428. 296571. 144714. 427857. 6161000. 5411143. 651408142. 594283. 923426. 49568. 888711. 312853. 841996. 4351138. 719410
141. 716
283. 007
425. 072
566. 466
708. 464
850. 354
992. 023
1133. 714
表2 各测量结果的残余误差(mm Tab. 2Residual e rror of measurement resu lts
间距物距
70~7570~8070~8570~9070~9570~10070~105
70~110390
-0. 00176-0. 01201-0. 01488-0. 0079-0. 00582-0. 00903-0. 01057-0. 01085392-0. 000990. 000614-0. 002650. 0023920. 0074540. 0045520. 000262-0. 00392394-0. 007630. 005058-0. 005020. 004857-0. 00110. 0073970. 000170. 004469396-0. 002490. 0031660. 0018780. 000993-0. 00248-0. 00206-0. 00224-0. 00095398-0. 000310. 001119-0. 00215-0. 00245-0. 0053-0. 004770. 0030530. 0050764000. 006454-0. 00603-0. 00766-0. 00943-0. 01363-0. 011120. 000523-0. 01433402-0. 002530. 0047530. 001020. 0065420. 0164850. 0094520. 0099460. 0073244040. 003315-0. 001190. 0023450. 0060380. 008010. 0098530. 0018480. 0053544060. 003452-0. 00630. 002837-0. 00594-0. 00346-0. 00249-0. 005190. 0029864080. 005705-0. 000410. 0041450. 001166-0. 00489-0. 005460. 0018440. 002622410
-0.
003
23
0. 011
226
0. 020136
0. 003
741
0.
004
708
0. 003
6460. 000353
0. 002
227
钟飞等基于结构光和机器视觉的尺寸测量及其误差分析
69
由残余误差观察法, 得到上表所得到的误差包含系统误差和随机误差, 由于:
i =l i -L =(l i -+(-L = i + L 可以由 L =L 来分析系统误差, 从而得到误差值并对结果进行补偿, 得到最终的测量结果见表3。
表3 最终测量结果(mmTab . 3Final measurements
间距测量真值测量均值系统误差标准偏差极限偏差70~754. 99755. 0130543240. 015550. 0012880. 00386370~809. 9959. 993404614-0. 0015950. 0019250.
00577670~8515. 000515. 006660. 006160. 0026250. 00787570~9020. 00620. 02150. 01550. 0016990. 00509770~9525. 005525. 040330. 034830. 0025310. 00759370~10030. 005030. 057370. 052370. 0022230. 00666970~10535. 001535. 068830. 067330. 0015350. 00460570~110
39. 9980
40. 0759
0. 0779
0. 002106
0. 006318
由表3可知, 测量系统可达到的精度为0. 01mm 。
实验的误差一方面来自于实验点的抽取, 用标定板测量其横纵坐标时将产生了一定的测量误差; 当从计算机图像提取对应实验点像素坐标值时, 由于噪声干扰或者光照条件不好等因素造成投影点不清楚, 手动挪动鼠标提取投影点像素值也存在误差, 误差一般在2~3个像素左右[6]。另一方面来自于测量系统和计算方法。测量系统误差包括由于CCD 摄像机模型简化和其像片存在的各种几何畸变所引起的误差[7], 此外还包括摄像机安装角度引起的误差:当摄像机安装角度发生变化, 其主光轴随之旋转, 引起投影点偏移, 造成误差, 且角度越大, 误差越大。此外, 还有计算方法上的误差
[8]
。
3 结论
通过绕线实验检测该CCD 视觉测量架的测量精度, 经理论分析与实验证明:在一定物距下, 如70mm 时, 相机的分辨率为0. 06173。一般通过误差修正, 用机器视觉来对线圈绕线质量进行监控的方案, 在一般的生产环境下可以达到0. 01mm 的测量精度, 系统的可靠性、稳定性更高, 可以实现对生产线产品的
自动、快速以及非接触测量, 因此具有广泛的使用价值。
参考文献:
[1] 姜玉秋. 基于双曲线的计算机视觉的管口尺寸测量[J].
吉林大学学报, 2009, 27(2 :150-155.
[2] 田原嫄. CCD 摄像机标定的研究[J].微计算机信息,
2008(27 :206-207.
[3] 赵清杰, 钱芳, 蔡利栋. 计算机视觉[M ].北京:机械工业
出版社, 2005.
[4] 张志勇, 王琼, 蒲亮, 等. 一种是实用CCD 相机标定方法
[J].红外与激光工程, 2006(s4 :408-415.
[5] 王和昌, 陈次昌, 王淮公. CCD 测量误差的研究[J].光学
技术, 2009, 35(3 :402-405.
[6] 郭涛, 陈伟, 严新平, 等. 单片式CCD 彩色摄像机颜色处
理原理与实现[J]. 武汉理工大学学报, 2007, 31(3 :488-490.
[7] 宋华丽, 余旭初, 陈菊雷, 等. 变焦相机标定在无人飞行
器中的应用[J]. 测绘工程, 2010, 19(1 :71-74. [8] 王栋, 潘卫军, 李涛. 帧转移面阵CCD 电子像移补偿设
计[J].航天返回和遥感, 2009, 30(3 :42-49.
水准测量的误差来源及控制方法 水准测量是确定公路工程地面点高程的方法之一,是高程测量中精度较高且常用的方法。实施过程中,需要几个人合作才能完成,误差允许范围内的精度由于仪器和人为的影响而不容易控制,而且易出现隐蔽性错误,如果不能及早发现,基础资料是错误的,从而水准点高程不正确,直接影响路线纵断面设计和施工。关键词:水准测量水准仪高程误差 1. 0勘察设计过程中水准测量的问题 水准测量是采用几何原理,利用水平视线测定两点间高差。仪器使用水准仪,工具是水准尺和尺垫。公路工程测量一般使用DS3型微倾式自动安平水准仪,每公里能达到的精度是3mm,水准仪在一个测站使用的基本程序是安置仪器、粗略整平、瞄准水准尺、精确整平和读数。我们在实际勘测过程中按这个顺序施行,在每一水准点段测完后复核结果。 同一条公路采用同一个高程系统,测量方法是基平与中平同时测量,两台水准仪同时观测一个水准尺,间视和转点由两个人立水准尺,但两台水准仪总是同时观测一个水准尺进行读数,一个水准点段测完后检核,在每一测站,没有检查、复核,为误差的积累创造了条件,容易返工,耽误时间、浪费人力。通过工程实践证明,这一方法经常出现错误,节选五个水准点连续错误中的一个测段结果如表1.1和1.2所示:
表1.1经过成果整理,读数差Δh=Σ后视-Σ前视,Δh小于2mm满足规范要求。但是施工过程中,施工单位提出问题,经过表1.2复核补充测量成果证实,外业测量的结果不正确,因此,有必要分析水准测量的误差,找出控制纠正的方法,避免错误的出现,保证项目的顺利施工。 2. 0水准测量的现状 现在应用水准点与中桩分开观测的方法,水准点观测采取往返测量,成果整理要求高差闭合差fh容(fh容=Σh往+Σh返)达到平原微丘区三等水准测量的精度不大于±20·L(1/2)。平原微丘地区影响水准测量精度的主要因素是水准路线的长度,长度越长,精度越低。山区,则是测站,测站越多,精度越低。 3. 0水准测量的误差分析及控制方法 水准测量误差有仪器误差、观测误差和外界条件的影响。 3.1仪器误差之一是水准仪的望远镜视准轴不平行于水准管轴所产生的误差 仪器虽在测量前经过校正,仍会存在残余误差。因此造成水准管气泡居中,水准
并联机床研究现状与展望 杨建新,郁鼎文,王立平,汪劲松 (清华大学精密仪器与机械学系,北京 100084) 摘要:并联机床作为机床技术和机器人技术相结合的产物,与传统结构机床相比具有很多的优点。简要介绍了目前国内外并联机床的发展现状和未来趋势,以及关键技术的研究进展,提出了发展并联机床需要解决的若干理论与技术问题,以及解决这些问题的可行途径。 关键词:并联机床;机构设计;运动学;数控技术;动力学 中图分类号:TH112 文献标识码:A 文章编号:1007-9483(2002)03-00010-03 Progress in the R esearch of Parallel Machine Tool YAN G Jian-xin,YU Ding-wen,Wang Li-ping,Wang Jin-song (Tsinghua University,Beijing,100084,China) Abstract:As the result of synthesizing machine tools with robot technology,parallel machine tools have many advantages compared as the classical ones.This paper briefly introduces the future prospective of parallel machine tools,points out some key issues that should be tackled for design and manufacture. K ey w ords:Parallel Machine Tools;Mechanism Design;K inematics;NC Technology;Dynamics 并联机床自20世纪90年代中期问世以来,不过数年时间,便以迅猛的速度向前发展[1]。并联机床实质上是机器人和机床技术相结合的产物,从1994年美国Ingersoll和G&L公司首次在IM TS上首次展出称为VARIX和Hexapods的并联机床后,到2001年汉诺威国际机床展览会(EMO′2001)上展出的各种构型的商品化并联机床已达到30余台。目前,国际学术界和工程界十分重视研究与开发并联机床,对这种新型数控装备的应用前景和市场潜力抱乐观的态度,纷纷投入大量的人力和物力竞相开发[2]。并联机床如此迅速发展,并受到众多科研单位与商家的高度重视,原因是这种机床具有高刚性、高速度、高加速度、高精度、高柔性、高灵活性、大推力以及重量轻等优点,从而使得并联机床具有广阔的发展和应用前景。 1 并联机床基础理论及关键技术 111 构型设计 构型设计是并联机床设计的首要环节,其目的是在给定所需自由度条件下,寻求含一个动平台的并联机构杆副配置、驱动方式和总体布局的各种可能组合。关于并联机构构型的研究一直是人们关注的热点。近几年众多学者提出了多种新机构构型,并对机构的类型和构建方法进行了系统的讨论,其中基于少自由度并联机构的并联机床逐渐受到人们的青睐[3]。 按末端执行器运动自由度的数目并联机构可以分为6自由度、5自由度、4自由度和3自由度并联机床。20世纪90年代中期出现的并联机床基本都是以Stewart平台为基础的,经过几年的研究人们发现以Stewart平台为基础的6自由度并联机床存在工作空间小和加工精度不易保证的缺点,机构的运动学、动力学设计较为复杂。因此,人们逐渐开始选择并设计一些新结构形式的少自由度机构来用于加工。基于少自由度并联机构的并联机床具有结构形式简单、作业空间大、运动学动力学设计简单、运动容易解耦、对机械元件的制造及控制精度较低等优点。在少自由度机构上附加转头并且结合工作台的运动,有可能实现刀具相对工件的5个或6个自由度的运动。最有代表性的基于少自由度并联机构的并联机床是瑞典Neos Robotics公司开发研制的Tricept系列。在基于少自由度的并联机床中,5自由度和4自由度机床一般都属于变结构或串并混联结构机床,在串并混联结构中一个支链内可以有多个驱动器。例如东北大学的5轴联动3杆虚轴数控机床。 按驱动副类型的不同,并联机床可以分为内副驱动、外副驱动和内外副混合驱动,其中定长杆作为支链的外副驱动或内外副混合驱动的结构形式越来越普遍。以Stewart 平台为原型的并联机床主要为内副驱动形式,内副驱动形式灵活,速度快,常用于机器人操作机中实现一般空间运动,然而在金属加工中,内副驱动表现出很差的静特性和动特性,容易产生热效应且不便于补偿。相反,外副驱动采用定长杆,在刚度和动态性能上要比内副驱动好得多,而且在很大程度上避免了热效应,降低了热补偿的难度,此外还具有作业空间大、机械结构简单、标准化强、工艺性较好、具有优势运动方向等优点。具有代表性的外副驱动机床是瑞士苏黎世联邦技术学院的的6滑块机床Hexaglide、韩国SEN2 A TE公司的串并联机床ECL IPSE等。 按支链中伺服驱动器的数目不同,并联机床可分为并 收稿日期:2002-03-03 基金项目:国家高技术研究发展计划(863计划)资助项目(2001AA421110);国家973资助项目(G1998030607) 作者简介:杨建新(1977-),男,山西阳泉人,清华大学博士研究生,主要研究领域为并联机床机构学与动力学。 012002年5月 机械设计与制造工程 第31卷 第3期
物理教案:长度的测量误差 教学目标 知识目标 1。知道长度的国际单位是米,其他单位有千米、分米、厘米、好米、微米、纳米。各个单位间的换算关系。 2。知道测量长度的工具是刻度尺,能正确使用刻度尺测量长度。 3。能正确读出测量结果,知道测量数值由准确值和估计值组成。 4。知道什么是误差,什么是错误并区别误差和错误。能力目标 1。培养观察能力:对图形和图像观察,了解通过视觉判断的长度与实际测量不同;通过观察刻度尺,认识刻度尺的量程、最小刻度、零刻线。 2。培养思维能力:通过单位换算,学会换算的一般方法。德育目标养成认真、细致的好习惯,例如用多次测量取平均值的方法减小误差。 教材分析 教材首先是通过让学生观察图和估测1分钟的时间,认识到人的感觉并非可
靠的,从而引出了用测量工具进行实际测量的重要性。列举了学生熟悉的测量工具,并指出长度测量是最基本的测量,刻度尺是最常用的测量工具,教材利用图片帮助学生分析如何正确使用刻度尺测量长度,教材要求教学中注重观察的环节。对于“长度的单位”提供了两个日常生活中的情景,使学生联系生活形成一般长度的概念。在关于“误差”的内容中,教材用通俗易懂的语言分析了误差为什么产生,和错误的区别以及减小的方法。教法建议 关于测量部分,由于学生缺乏定量研究自然现象的经验,对测量的重要性认识不足,所以应当引导学生观察教材中的两个例子,有条件的学校,还可以用其他的例子使学生认识到利用感觉器官做判断的局限性,同时还可以提高学生的学习兴趣,可以让学生总结出“感觉并不总是可靠的,需要进行测量”的结论。教师可以在此基础上,进一步联系实际,说明在生产和生活实践中应用大量的测量、精确的测量等。 关于长度的单位,应当着眼形成长度的具体观念,所以在教学中展示图片、图像和一些关于长度的视频资料,教学方法应当注意让学生动起来,自己实践。关于正确使用刻度尺,先观察刻度尺的零点、量程、最小刻度,并告知其他的测
二等水准测量设计和技术要求 1. 水准网的布设 1. 1水准网的技术设计 水准网布设前,必须进行技术设计,获得水准网和水准路线的最佳布设方案。技术设计的要求、内容和审批程序按照ZD A75 001《测绘技术设计规定》执行。 1. 2高程系统和高程基准 水准点的高程采用正常高系统,按照1985国家高程基准起算。 海上岛屿不能与国家高程网直接连测时,可建立局部水准原点,根据岛上验潮站平均海水面的观测确定其高程,作为该岛屿及其附近岛屿的高程基准。凡采用局部水准原点测定的 水准点高程,应在水准点成果表中注明,并说明局部高程基准的有关情况。 1. 3水准测量的精度 每公里水准测量的偶然中误差M和每公里水准测量的全中误差M W—般不得超过表1 规定的数值。 和W的计算方法见后面式(1)和式(2)规定。 2. 选点与埋石 2. 1选点 2.1.1选定水准路线时,应尽量沿坡度较小的公路、大路进行,应避开土质松软的地段和磁 场甚强的地段,应避开行人、车辆来往繁多的街道和大的火车站等,应尽量避免通过大的河 流、湖泊、沼泽与峡谷等障碍物;选定水准点时,必须能保证点位地基坚实稳定、安全僻静,并利于标石长期保存与观测。 2.1.2每一个水准点点位选定后,应设立一个注有点号、标石类型的点位标志,并按规定填 绘点之记;在选定水准路线的过程中,须按规定绘制水准路线图;对于水准网的结点,还须 按规定格式填绘结点接测图。 3. 2埋石 水准标石,含基岩水准标石、基本水准标石和普通水准标石三大类型。根据其制作材料 和埋石规格的不同,可分别为表2所列十一种标石。
混凝土普通水准标石钢管普通水准标石岩层普通水准标石混凝土柱普通水准标石爆破型混凝土柱普通水准标石墙 角水准标志 3 普通水准标石 标石的埋石类型可根据实地情况及相应的规定要求选定、埋设和整饰。 4.仪器的技术要求 4. 1仪器的选用 二等水准测量中使用的仪器按表3规定执行。 二等水准测量中所用仪器其技术指标按表4规定执行。
水准测量误差分析及注意事项分析 在測量工作中,高程测量是一项不可缺少基本工作,一般使用的测量方法有三角高程测量与水准测量等,在高程测量中,水准测量具有较高的测量精准度。分析了水准测量误差分析及注意事项,以减弱水准测量误差影响。 标签:水准测量;误差;影响 因为多重因素的影响,如,外界环境及仪器等,不利把控水准测量。产生的错误不容易发现,使得基础资料不准确,进而导致水准点间高差出现错误,对工程施工造成直接影响,带来时间及经济损失。所以,分析水准测量误差的影响影响很重要。 1、水准测量误差分析 测量中难免存有误差,按照水准测量误差产生原因不同,可将误差划分为三个方面:外界条件引起的误差、仪器误差、观测误差。 1.1外界条件引起的误差 1.1.1地球曲率与大气折光误差 地球曲率影响高程测量,这点不能忽略,如果视距为100m,高程方面误差接近1mm,影响较大。该误差类1以于水准管轴不平行视准轴,以前后视距离相等的方法可消除该误差对高差带来的影响。地面上空气密度以梯度呈现,光线进入各密度媒介时,产生折射,通常从疏媒介向密媒介折射,因为水准仪视线不理想。通常大气层上层空气密度疏,下层空气密,视线经过大气层,变成了向下弯曲的曲线,导致尺上读数变小,与水平线出现差值,也就是遮光差。 山地连续下坡或上坡时,前后视线和地面的高度增大,遮光差产生的影响越来越大,体现相应的系统性,需要减少视线长度,提升视线高度,以此,将大气遮光影响减至较低。 如果天气晴朗,接近地面的温度比较高,使得下层空气密度相对较稀,这时视线变成了向上弯曲的曲线,导致尺上读数变大。视线线越接近地面,产生的折射越大,所以,通常视线要高出地面一定高度,比地面高出0.5m,就是为了减弱这种影响。如果地面平坦,地面覆盖的物体大致相同,前视距与后视距是相等的,前视距与后视距具有相同的遮光差方向,大小大致相同,能够很大程度上消除遮光差影响。 1.1.2尺子与仪器下沉误差 在转站过程中,尺垫会下沉,导致下一站后视读数变大,导致测量出现高差
长度测量 长度是一个基本物理量,许多其他的物理量也常常化为长度量进行测量;如用温度计测量温度就是确定水银柱面在温度标尺上的位置;测量电流或电压就是确定指针在电流表或电压表标尺上的位置等。因此,长度测量是一切测量的基础。物理实验中常用的测量长度的仪器有:米尺、游标卡尺、螺旋测微器(千分尺)、读数显微镜等。通常用量程和分度值表征这些仪器的规格。量程表示仪器的测量范围;分度值表示仪器所能准确读到的最小数值。分度值的大小反映了仪器的精密程度。一般来说,分度值越小,仪器越精密。 【实验目的】 1. 掌握游标卡尺、螺旋测微器、读数显微镜的测量原理和使用方法; 2. 学习正确读取和记录测量数据; 3. 掌握数据处理中有效数字的运算法则及表示测量结果的方法; 4.熟悉直接和间接测量中的不确定度的计算. 【实验仪器】 不锈钢直尺,游标卡尺,螺旋测微器,铁环、细金属丝、钢珠 【实验原理】 一、游标卡尺 用普通的米尺或直尺测量长度,只能准确地读到毫米位。毫米以下的1位要凭视力估计,实验中要使读数准确到0.1mm或更小时,一般采用游标卡尺和螺
游标上分度格数 主尺上最小分度值 == -=y m x y x 1δ旋测微计。 1.游标卡尺的结构 游标卡尺又叫游标尺或卡尺,它是为了使米尺测量的更准确一些,在米尺上附加了一段能够滑动的有刻度的小尺,叫做游标。利用它可将米尺估读的那位数值准确地读出来。因此,它是一种常用的比米尺精密的测长仪器。利用游标卡尺可以用来测量物体的长度、孔深及内外直径等。 游标卡尺的外形如图4-1-1所示。它主要由两部分构成:与量爪AA’相连的主尺D ;与量爪BB’及深度尺C 相连的游标E 。游标E 可紧贴着主尺D 滑动。量爪A 、B 用来测量厚度和外径,量爪A’、B’用来测量内径,深度尺C 用来测量槽的深度,他们的读数值都是由游标的0线于主尺的0线之间的距离表示出来。 2.游标卡尺的测量原理 游标卡尺在构造上的主要特点是:游标刻度尺上m 个分格的总长度和主刻度尺上的(m -1)个分格的总长度相等。设主刻度尺上每个等分格的长度为y ,游标刻度尺上每个等分格的长度为x ,则有 mx =(m -1)y (4-1-1) 主刻度尺与游标刻度尺每个分格的差值是 式中,x δ为游标卡尺所能准确读到的最小数值,即分度值(或称游标精度)。若把游标等分为10个分格(即m=10),这种游标卡尺叫做“十分游标”。“十分游标”的x δ=1/10mm 。这是由主刻度尺的刻度值于游标刻度值之差给出的,因此x δ不是估读的,它是游标卡尺所能准确读到的最小数值,即游标卡尺的分度值。若m=20,则游标卡尺的最小分度为1/20mm=0.05mm ,称为20分度游标卡尺;还有常用的50分度的游标卡尺,其分度值为1/50mm=0.02mm 。 (4-1-2)
水准测量误差分析 3.5.1水准测量的误差分析 水准测量误差包括仪器误差,观测误差和外界条件的影响三个方面。 (一) 仪器误差 ① 仪器校正后的残余误差 例如水准管轴与视准轴不平行,虽经校正仍然残存少量误差等。这种误差的影响与距离成正比,只要观测时注意使前、后视距离相等,便可消除或减弱此项误差的影响。 ② 水准尺误差 由于水准尺刻划不正确,尺长变化、弯曲等影响,会影响水准测量的精度,因此,水准尺须经过检验才能使用。至于尺的零点差,可在一水准测段中使测站为偶数的方法予以消除。 (二) 观测误差 ①水准管气泡居中误差 设水准管分划道为τ″,居中误差一般为±0.15τ″,采用符合式水准器时,气泡居中精度可提高一倍,故居中误差为 m =ρτ' '?'''±215.0·D 3-35 式中 D —水准仪到水准尺的距离。 ② 读数误差 在水准尺上估读数毫米数的误差,与人眼的分辨力、望远镜的放大倍率以及视线长度有关,通常按下式计算 m v =ρ' '?''D V 06 3-36 式中 V —望远镜的放大倍率; 60″—人眼的极限分辨能力。 ③ 视差影响 当存在视差时,十字丝平面与水准尺影像不重合,若眼睛观察的位置不同,便读出不同的读数,因而也会产生读数误差。 ④ 水准尺倾斜影响 水准尺倾斜将尺上读数增大,如水准尺倾斜033'?,在水准尺上1m 处读数时,将会产生2mm 的误差;若读数大于1m ,误差将超过2mm 。 (三)外界条件的影响 ① 仪器下沉 由于仪器下沉,使视线降低,从而引起高差误差。若采用“后、前、前、后”观测程序,可减弱其影响。 ② 尺垫下沉 如果在转点发生尺垫下沉,使下一站后视读数增大,这将引起高差误差。采用往返观测的方法,取成果的中数,可以减弱其影响。 ③ 地球曲率及大气折光影响 如式3-25所示 地球曲率与大气折光影响之和为 R D f 2 43.0?= 3-37
[长度得测量误差] 教学目得 (一)、知识目标: 1.学会用刻度尺测量物体得长度,能正确地记录测量结果,长度得测量误差。 2.知道读数时要估读最小刻度得下一位数字。 3.知道测量有误差,通过多次测量取平均值可以减小误差。知道误差与错误有区别。 (二)、思想目标: 初步了解观察演示实验得规律,通过简单得测量知识,对学生进行严谨性教育,体会测量在物理学中得重要性。 教学重点: 知道长度测量得初步知识,会正确使用刻度尺。 难点: 能根据刻度尺得最小刻度正确记录测量结果 教具 示教刻度尺、长方体木块、学生自备透明三角尺。 一、教学过程 1.测量(着重讲测量得意义) 让学生观察课本图1-1与图1-2,比较两条线段与两个圆面积得大小,再让学生用尺子量量,回答视觉总就是可靠吗?继而举例说明,对于时间长短、温度高低等,靠我们得感觉直接判断,并不总就是可靠。不仅很难精确,有时甚至会出现错误。 在观察与实验中,经常需要对各种物理量做出准确得判断,得到精确得数据,就必须用测量仪器来测量。例如:用刻度尺测量物体得长度,用秤来测物体得质量,用钟表来测时间得长短,用温度计来测量温度得高低。 长度就是最基本得物理量,在生产、生活中,在物理实验中经常要测量长度。(举例)测量长度得方法与仪器有许多种,其中刻度尺就是常用得测量长度得工具。同时学会使用刻度尺,有助于我们学会其她测量仪器与了解测量得初步知识。 2.长度得单位 测量任何物理量都必须规定它得单位。学生已经知道“米”就是长度单位。应告诉学生,米就是国际统一得长度基本单位,其她得长度单位就是由米派生得。米得代表符号就是m。其她常用得长度单位有千米、分米、厘米、毫米、微米。它们得代表符号分别就是 km,dm,cm,mm,μm。(通常刻度尺得单位标注就是用符号表示,为使学生能顺利观察刻度尺,应介绍单位得代表符号) 单位换算:1m=1000 km 1m=10 dm 1dm=10 cm 1cm=10 mm 1mm=1000um 1um=-1000 nm 学生观察课本上得单位换算通过列举事例使学生对米、分米、厘米、毫米等单位长度能心中有数,有个粗略得概念。例如:常用铅笔笔心直径大约1毫米,小姆指宽约有1厘米,手掌得宽大约有1分米,成年人得腿长大约1米左右。 3.正确使用刻度尺 ①刻度尺得刻度:让学生观察刻度尺,并依次回答课本上得问题。关于量程与最小刻度值,应给学生以简单得解释。零刻度有磨损得刻度尺,可用没磨损得其她刻度做为测量得起点,这时末端读数与起点刻度数之差,才就是被测物体得长度。 ②刻度尺得使用:学生对刻度尺比较熟悉,自认为都会使用,实际上在使用中经常出错。因此要引导学生发现自己使用刻度尺出现得错误,自觉地纠正,养成按规则要求操作得习惯。让学生用透明三角板测量一纸条得宽度。首先分清三角板得正、反面,然后要求学生把三角板反着用(即有刻度得一面向上)。学生在测量时,故意让学生将身体向左偏、向右偏,让学生回答两次读数就是否一样?(不一样,且尺子越厚,两次读数差别越大)这两个读数哪一个对?(都不对)怎样读才能得到正确得数值?引导学生总结出读数得视线规则:读数时,视线
二等水准测量设计和技术要求 1. 水准网的布设 1.1水准网的技术设计 水准网布设前,必须进行技术设计,获得水准网和水准路线的最佳布设方案。技术设计的要求、内容和审批程序按照ZD A75 001《测绘技术设计规定》执行。 1. 2高程系统和高程基准 水准点的高程采用正常高系统,按照1985国家高程基准起算。 海上岛屿不能与国家高程网直接连测时,可建立局部水准原点,根据岛上验潮站平均海 水面的观测确定其高程,作为该岛屿及其附近岛屿的高程基准。凡采用局部水准原点测定的水准点高程,应在水准点成果表中注明,并说明局部高程基准的有关情况。 1. 3水准测量的精度 每公里水准测量的偶然中误差?M 和每公里水准测量的全中误差W M 一般不得超过表1 规定的数值。 ?M 和W M 的计算方法见后面式(1)和式(2)规定。 2. 选点与埋石 2.1选点 2.1.1选定水准路线时,应尽量沿坡度较小的公路、大路进行,应避开土质松软的地段和磁场甚强的地段,应避开行人、车辆来往繁多的街道和大的火车站等,应尽量避免通过大的河流、湖泊、沼泽与峡谷等障碍物;选定水准点时,必须能保证点位地基坚实稳定、安全僻静,并利于标石长期保存与观测。 2.1.2每一个水准点点位选定后,应设立一个注有点号、标石类型的点位标志,并按规定填绘点之记;在选定水准路线的过程中,须按规定绘制水准路线图;对于水准网的结点,还须按规定格式填绘结点接测图。 3. 2埋石 水准标石,含基岩水准标石、基本水准标石和普通水准标石三大类型。根据其制作材料和埋石规格的不同,可分别为表2所列十一种标石。
标石的埋石类型可根据实地情况及相应的规定要求选定、埋设和整饰。4.仪器的技术要求 4.1仪器的选用 二等水准测量中使用的仪器按表3规定执行。 4.3仪器技术指标 二等水准测量中所用仪器其技术指标按表4规定执行。
3-UPU并联机构误差影响敏感度 少自由度并联机器人基于自身特点,有着广泛的用途。本文针对少自由度并联家族中特殊的3自由度和4自由度3-UPU少自由度并联机构,对各类误差源进行了种类综合,运用空间坐标转换法,对3-UPU少自由度并联机构进行误差 分析,给出了具体的误差分析的模拟流程,对各类静态误差源引起的动平台位姿 误差进行了分析。运用空间坐标转换法以及闭环矢量法建立了理想以及各类误 差存在情况下的位姿转换矩阵。使用数值的方法对3-UPU并联机构位姿正解进 行计算和分析。从两个方面对由于静态误差引起的机器人操作误差作了分析。 第一,在误差不变的情况下,分析了随着时间的变化,机器人末端操作器的位姿误差;第二,运用概率分布相关理论,分析了各类误差源大小对机器人位姿误差大小的影响,得出了部分误差分布规律。由此,分析了各个位姿误差对误差源大小的 敏感性。比较分析了各类误差源对机构本身操作位姿的影响大小,对比3自由度和4自由度进行全面比较,分析二者之间的过渡关系。结果表明:4自由度3-UPU 并联机构,在误差作用下,z轴方向即定平台法线方向的转动误差敏感度都极高, 极易约束掉绕着z轴方向的转动,蜕变为3自由度平动并联机构。而3自由度平动机构,在各种误差源作用下,z轴方向的转动误差很小且敏感度很低,也就是说 3自由度平动3-UPU并联机构对z轴方向的转动自由度的约束稳定,受误差影响 不大。 同主题文章 [1]. 阎华,刘桂雄,郑时雄. 机器人位姿误差建模方法综述' [J]. 机床与液压. 2000.(01) [2]. 周学才. 机器人位姿误差的显著性分析法' [J]. 广东工业大学学报. 1995.(01) [3]. 蒲毅彬,吴紫旺,常小晓,廖全荣. CT在岩土实验中的数值分析' [J]. CT理论与应用研究. 1994.(03) [4]. 周学才,张启先. 机器人位姿误差的显著性分析法' [J]. 机械工程学报. 1994.(S1) [5]. 熊西文. 评《数值分析与计算》一书' [J]. 大连大学学报. 1994.(01) [6]. 高剑峰. 生化数值分析系统' [J]. 石河子大学学报(自然科学版). 1992.(01) [7].
第一章长度的测量误差 山东省威海市国际中学庞绍君 教学目的 (一)、知识目标: 1.学会用刻度尺测量物体的长度,能正确地记录测量结果。 2.知道读数时要估读最小刻度的下一位数字。 3.知道测量有误差,通过多次测量取平均值可以减小误差。知道误差和错误有区别。 (二)、思想目标: 初步了解观察演示实验的规律,通过简单的测量知识,对学生进行严谨性教育,体会测量在物理学中的重要性。 教学重点: 知道长度测量的初步知识,会正确使用刻度尺。 难点: 能根据刻度尺的最小刻度正确记录测量结果 教具 示教刻度尺、长方体木块、学生自备透明三角尺。 一、教学过程 1.测量(着重讲测量的意义) 让学生观察课本图1-1和图1-2,比较两条线段和两个圆面积的大小,再让学生用尺子量量,回答视觉总是可靠吗?继而举例说明,对于时间长短、温度高低等,靠我们的感觉直接判断,并不总是可靠。不仅很难精确,有时甚至会出现错误。 在观察和实验中,经常需要对各种物理量做出准确的判断,得到精确的数据,就必须用测量仪器来测量。例如:用刻度尺测量物体的长度,用秤来测物体的质量,用钟表来测时间的长短,用温度计来测量温度的高低。 长度是最基本的物理量,在生产、生活中,在物理实验中经常要测量长度。(举例)测量长度的方法和仪器有许多种,其中刻度尺是常用的测量长度的工具。同时学会使用刻度尺,有助于我们学会其他测量仪器和了解测量的初步知识。 2.长度的单位 测量任何物理量都必须规定它的单位。学生已经知道“米”是长度单位。应告诉学生,米是国际统一的长度基本单位,其他的长度单位是由米派生的。米的代表符号是m。其他常用的长度单位有千米、分米、厘米、毫米、微米。它们的代表符号分别是km,dm,cm,mm,μm。(通常刻度尺的单位标注是用符号表示,为使学生能顺利观察刻度尺,应介绍单位的代表符号) 单位换算:1m=1000 km 1m=10 dm 1dm=10 cm 1cm=10 mm 1mm=1000um 1um=-1000 nm 学生观察课本上的单位换算通过列举事例使学生对米、分米、厘米、毫米等单位长度能心中有数,有个粗略的概念。例如:常用铅笔笔心直径大约1毫米,小姆指宽约有1厘米,手掌的宽大约有1分米,成年人的腿长大约1米左右。 3.正确使用刻度尺 ①刻度尺的刻度:让学生观察刻度尺,并依次回答课本上的问题。关于量程和最小刻度值,应给学生以简单的解释。零刻度有磨损的刻度尺,可用没磨损的其他刻度做为测量的起点,这时末端读数与起点刻度数之差,才是被测物体的长度。 ②刻度尺的使用:学生对刻度尺比较熟悉,自认为都会使用,实际上在使用中经常
二等水准测量实习报告
作者: 日期:
二等水准测量实习报 告 口
目录 一、实习目的 (2) 二、实习任务............................................... .2 三、实习的组织与准备 (2) 四、实习要求......................................... .2 五、仪器及工具..................................... ?? (2) 六、实习步骤 (4) 七、主要技术要求................................ .. (6) 八、注意事项............................................. .6 九、实习心得体会 (7)
一、实习的目的 控制测量学是研究精确测定和描绘地面控制点空间位置及其变化的学科。它的服务对象主要是各种工程建设、城镇建设和土地规划与管理等工作。它是各种测量学的基础。所以控制测量的实习非常重要。控制测量学集中学习是在课堂结 束之后在实习地集中的实践性教学,是各项课间的综合应用,是巩固和深化课堂所学知识的必要环节。通过实习,不仅了解到了控制测量的全过程,系统地掌握测量仪器的操作和检校、待定点计算的基本技能,而且为今后解决实际工程中的有关问题打下基础,还能在业务组织能力和实际工作能力方面的锻炼。通过一条水准环线的施测,掌握二等精密水准测量的观测和记录,使所学知识得到一次实际的应用在实习中培养了我们严格认真的科学态度、塌实求实的工作作风、吃苦耐劳的献身精神和团结协作的集体观念。 二、实习任务 利用精密水准仪围绕本学校的篮球场测一圈。每个组员都要轮换进行观测,拉尺,举尺还有就是记录数据并行结算。尽量做到人人都能熟练掌握精密水准的操作和使用方法和技巧,并能快速准确无误的记录和处理结算处正确的结果。 三、实习的组织与准备 了解精密水准测量的规范,掌握规范要求和注意点,了解精密水准测量记录纸的观察记录顺序。 对班级人员分组,精密水准测量分组情况(共6人): 本组组员:许勤肖燕赵建新钟万红邓灯余朱立成 (三)、实习的仪器和工具 精密水准测量:自动安平水准仪J2 一台,数码水准尺一对,测绳,二等水准测量记录纸 四、实习要求 1、每组选定一条0.6—I.OKm的闭合水准环线,每人完成不少于一个测站上的观测、记录、扶尺、拉绳的作业。 2、计算环线测量成果表。
水准测量的误差来源及控制
浅析水准测量的误差来源及控制方法 0勘察设计过程中水准测量的问题 水准测量是采用几何原理,利用水平视线测定两点间高差。仪器使用水准仪,工具是水准尺和尺垫。公路工程测量一般使用DS 3型微倾式自动安平水准仪,每公里能达到的精度是3mm,水准仪在一个测站使用的基本程序是安置仪器、粗略整平、瞄准水准尺、精确整平和读数。我们在实际勘测过程中按这个顺序施行,在每一水准点段测完后复核结果。 同一条公路采用同一个高程系统,测量方法是基平与中平同时测量,两台水准仪同时观测一个水准尺,间视和转点由两个人立水准尺,但两台水准仪总是同时观测一个水准尺进行读数,一个水准点段测完后检核,在每一测站,没有检查、复核,为误差的积累创造了条件,容易返工,耽误时间、浪费人力。通过工程实践证明,这一方法经常出现错误,节选五个水准点连续错误中的一个测段结果如表1.1和1.2所示: 表1.1 廊泊一级公路BM4至BM5水准点外业测量结果 点号 后视 视线高 间视 前视 高程 点号 后视 视线高 间视 前视 高程 BM4 3.300
3.286 15.529 557.8 1.483 15.765 1.450 14.282 254.6 1.442 14.308 600 1.386 14.379
1.424 14.326 650 1.357 14.408 314.6 1.425 15.715 1.460 14.290 700 1.672 16.005
14.333 344.6 1.420 14.295 750 1.482 14.523 374.6 1.387 14.328 800
详解并联机床的设计理论与关键技术 摘要:概述提高生产环境适应性满足快速多变市场需求近年来全球机床制造业积极探索研制新型功能制造装备系统机床结构技术上突破性进展90年中期问世并联机床。 ParallelMachineTool机床VirtualAxisMachineTool并联运动学机器ParallelKinematicsMachine并联机床实质上机器人技术机床 2002:机床,入世是挑战更是机遇专家指出要加大我国数控机床研发力度加快普及型数控机床的发展漫话中国机床制造业的服务竞争中国铣床和加工中心市场的现状和展望国内外车床的技术水平和发展方向世界加工中心的生产、需求和发展动向国内外机床发展趋势世界数控系统发展趋势切削加工技术和数控机床的发展。 1 概述 为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(P arallel Machine Tool),又称虚(拟)轴机床(Virtual Axis Machine Tool)或并联运动学机器(Paralle l Kinematics Machine)。并联机床实质上是机器人技术与机床结构技术结合的产物,其原型是并联机器人操作机。与实现等同功能的传统五坐标数控机床相比,并联机床具有如下优点: 刚度重量比大:因采用并联闭环静定或非静定杆系结构,且在准静态情况下,传动构件理论上为仅受拉压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。 响应速度快:运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动平台获得很高的进给速度和加速度,因而特别适于各种高速数控作业。 环境适应性强:便于可重组和模块化设计,且可构成形式多样的布局和自由度组合。在动平台上安装刀具可进行多坐标铣、钻、磨、抛光,以及异型刀具刃磨等加工。装备机械手腕、高能束源或CCD摄像机等末端执行器,还可完成精密装配、特种加工与测量等作业。 技术附加值高:并联机床具有“硬件”简单,“软件”复杂的特点,是一种技术附加值很高的机电一体化产品,因此可望获得高额的经济回报。 目前,国际学术界和工程界对研究与开发并联机床非常重视,并于90年代中期相继推出结构形式各异的产品化样机。1994年在芝加哥国际机床博览会上,美国Ingersoll铣床公司、Giddings %26 Lewis 公司和Hexal公司首次展出了称为“六足虫”(Hexapod)和“变异型”(VARIAX)的数控机床与加工中心,引起轰动。此后,英国Geodetic公司,俄罗斯Lapik公司,挪威Multicraft公司,日本丰田、日立、三菱等公司, 瑞士ETZH和IFW研究所,瑞典Neos Robotics公司,丹麦Braunschweig公司,德国亚琛工业大学、汉诺威大学和斯图加特大学等单位也研制出不同结构形式的数控铣床、激光加工和水射流机床、坐标测量机和加工中心。与之相呼应,由美国Sandia国家实验室和国家标准局倡议,已于1996年专门成立了Hexapod用户协会,并在国际互联网上设立站点。近年来,与并联机床和并联机器人操作机有关的学术
长度的测量教案 Prepared on 24 November 2020
第1节 长度的测量 教学目标 一、知识目标 1.认识长度的基本单位和其它常用单位,并能进行单位换算 1.会使用适当的刻度尺测量长度 2.知道测量有误差,误差和错误有区别,怎么样来减小误差 二、能力目标 1.体验通过日常经验或自然现象粗略估计长度的方法,具有初步解决简单生活问 题的能力. 2.通过进行简单的测量,具有使用简单测量工具的能力. 三、德育目标 1.通过对刘翔人物的简单介绍,增养民族自豪感 教学重点 正确使用刻度尺测量长度. 教学难点 正确记录测量结果. 教学方法 讨论法:引入学生感兴趣的问题,通过学生的积极讨论,引起学生对问题的关注,提高学生的兴趣,实现教学目标. 实践法:通过学生的亲自实践,学会刻度尺的正确使用. 教具准备 测长度工具:直尺、皮卷尺、游标卡尺、千分尺等. 投影仪. 板书设计 1km=103m 1dm=10-1 m 长度的单位及换算 1cm=-10-2m 1mm=10-3m 1μm=10-6m 1nm=10-9m 测量的工具:直尺、皮尺、卷尺、游标卡尺、千分尺 选:根据测量要求,选择适当量程及分度值的尺子 放:刻度尺要与被测对象平行;刻度线紧贴被测物;零 刻线与被测对象一端对齐 看:视线正对刻度尺刻线,不要斜视 读:读数时要估读到分度值的下一位 记:记录测量结果要有准确值、估计值和单位 误差 测量的数值和真实值之间必然存在的差异就叫误差。 注意:1.误差是不可避免的,误差不可能消 除,只能尽量的减小。 2.减小误差的办法:多次测量取平均值 使用精密的测量工具 ,改进测量方法 3.误差不是错误: 教学过程 一、引入新课 正确使用刻度1.长度的测
长度的测量误差 教学目标 知识目标 1.知道长度的国际单位是米,其他单位有千米、分米、厘米、好米、微米、纳米. 各个单位间的换算关系. 2.知道测量长度的工具是刻度尺,能正确使用刻度尺测量长度. 3.能正确读出测量结果,知道测量数值由准确值和估计值组成. 4.知道什么是误差,什么是错误并区别误差和错误. 能力目标 1. 培养观察能力:对图形和图像观察,了解通过视觉判断的长度与实际测量不同; 通过观察刻度尺,认识刻度尺的量程、最小刻度、零刻线. 2. 培养思维能力:通过单位换算,学会换算的一般方法. 德育目标养成认真、细致的好习惯,例如用多次测量取平均值的方法减小误差. 教材分析 教材首先是通过让学生观察图和估测1 分钟的时间,认识到人的感觉并非可靠的,从而引出了用测量工具进行实际测量的重要性. 列举了学生熟悉的测量工具,并指出长度测量是最基本的测量,刻度尺是最常用的测量工具,教材利用图片帮助学生分析如何正确使用刻度尺测量长度,教材要求教学中注重观察的环节. 对于长度的单位提供了两个日常生活中的情景,使学生联系生活形成一般长度的概念. 在关于误差的内容中,教材用通俗易懂的语言分析了误差为什么产生,和错误的区别以及减小的方法. 教法建议关于测量部分,由于学生缺乏定量研究自然现象的经验,对测量的重要性认识不足,所以应当引导学生观察教材中的两个例子,有条件的
学校,还可以用其他的例子使学生认识到利用感觉器官做判断的局限性,同时还可以提高学生的学习兴趣,可以让学生总结出感觉并不总是可靠的,需要进行测量的结论. 教师可以在此基础上,进一步联系实际,说明在生产和生活实践中应用大量的测量、精确的测量等. 关于长度的单位,应当着眼形成长度的具体观念,所以在教学中展示图片、图像和一些关于长度的视频资料,教学方法应当注意让学生动起来,自己实践. 关于正确使用刻度尺,先观察刻度尺的零点、量程、最小刻度,并告知其他的测量工具也有类似的问题,从而形成学生不同事物的共同规律的观念. 在此基础上,用观察法自己得到正确的用刻度尺测量长度的方法. 教师可以在课堂教学中组织讨论小组,其后,引导学生勤于思考着重理解,分析正确的和错误的测量方法的不同,而能深入理解什么是正确的测量. 关于正确记录测量结果,结果要注明单位,应当在今后的学习中进一步巩固,提示学生要重视这个问题就可以了. 在正确读数这个问题上,讲清得到读数的步骤,学生在此基础上,用练习巩固,形成学习习惯为宜,不宜让学生弄清细节和原理. 关于误差的教学,讲清误差和错误的区别,并知道减小误差的方法,关于多次测量取平均值的具体应用,在初三物理测量电阻中才会较高要求的应用. 教学设计示例 第一节长度测量误差 【课题】长度的测量误差 【重点难点分析】知道长度的单位,对于长度的进率的指数表示是一个难
虚拟轴机床研究进展综述 Xx 学号:xx 摘要:虚拟轴机床作为一种新型的加工设备在广泛的领域内引起人们的重视。 现对虚拟轴机床的特点和应用,以及虚拟轴机床在国内外的研究状况进行综述和分析,结合虚拟轴机床的最新研究领域和现状,对虚拟轴机床将来的发展趋势做了详细的展望。 关键词:虚拟轴;机床;关键技术;发展趋势 0 引言 随着科学技术的快速发展,机械制造业也经历了空前的变化。新一代机床的发展趋势是进一步满足超精密、超高速、激光和细微加工等新工艺提出的高性能和高集成度的要求。虚拟轴并联机床的出现和发展就是典型的例子。虚拟轴并联运动机床是基于空间并联机构Stewart【1】平台原理开发的,它以空间并联机构为基础,充分利用计算机数字控制的优势,以软件取代部分硬件,以电器装置和电子元件取代部分机械传动,使以笛卡尔坐标直线位移为基础的机床结构和运动学原理发生了根本的变化。 1 虚拟轴机床的特点 1.1 虚拟轴机床的结构特点 传统机床的工作轴线和三维直角坐标轴相对应,而虚拟轴机床的工作主轴轴线突破了传统的概念。传统机床布局的基本特点是以机床、立柱、横梁等作为支撑部件,主轴部件和工作台的滑板沿支撑部件上的直线导轨运动,按照X、Y、Z 坐标运动叠加的串联运动学原理,形成刀头点的加工表面轨迹。 虚拟轴并联运动机床(图1)以桁架杆系结构[2]取代传统机床的悬臂梁和两支点梁结构来承载切削力和部件重力, 加上运动部件的质量明显减小以及主要由电主轴、滚珠丝杆、直线电动机等机电一体化部件组成,因而具有刚度高、动态特性好、机床的模块化程度高、易于重构以及结构简单等特点[3-4]。 1.1.1机床机构简单 虚拟轴机床主要由框架和变长度杆等简单构件组成,对于复杂的曲面加工,不需要普通机床的X、Y、Z三个方向的工作台或刀架的复合运动,只要控制六杆长度即可。机床用较为复杂的控制换取了结构的最大简化。 1.1.2机床结构强度高 传统机床因结构不对称,而使机床受热受力不均匀。虚拟机床呈对称的
§5.5 精密水准测量的实施 精密水准测量一般指国家一、二等水准测量,在各项工程的不同建设阶段的高程控制测量中,极少进行一等水准测量,故在工程测量技术规范中,将水准测量分为二、三、四等三个等级,其精度指标与国家水准测量的相应等级一致。 下面以二等水准测量为例来说明精密水准测量的实施。 5.5.1 精密水准测量作业的一般规定 在前一节中,分析了有关水准测量的各项主要误差的来源及其影响。根据各种误差的性质及其影响规律,水准规范中对精密水准测量的实施作出了各种相应的规定,目的在于尽可能消除或减弱各种误差对观测成果的影响。 (1)观测前30分钟,应将仪器置于露天阴影处,使仪器与外界气温趋于一致;观测时应用测伞遮蔽阳光;迁站时应罩以仪器罩。 (2)仪器距前、后视水准标尺的距离应尽量相等,其差应小于规定的限值:二等水准测量中规定,一测站前、后视距差应小于1.0m,前、后视距累积差应小于3m。这样,可以消除或削弱与距离有关的各种误差对观测高差的影响,如i角误差和垂直折光等影响。 (3)对气泡式水准仪,观测前应测出倾斜螺旋的置平零点,并作标记,随着气温变化,应随时调整置平零点的位置。对于自动安平水准仪的圆水准器,须严格置平。 (4)同一测站上观测时,不得两次调焦;转动仪器的倾斜螺旋和测微螺旋,其最后旋转方向均应为旋进,以避免倾斜螺旋和测微器隙动差对观测成果的影响。 (5)在两相邻测站上,应按奇、偶数测站的观测程序进行观测,对于往测奇数测站按“后前前后”、偶数测站按“前后后前”的观测程序在相邻测站上交替进行。返测时,奇数测站与偶数测站的观测程序与往测时相反,即奇数测站由前视开始,偶数测站由后视开始。这样的观测程序可以消除或减弱与时间成比例均匀变化的误差对观测高差的影响,如i角的变化和仪器的垂直位移等影响。 (6)在连续各测站上安置水准仪时,应使其中两脚螺旋与水准路线方向平行,而第三脚螺旋轮换置于路线方向的左侧与右侧。 (7)每一测段的往测与返测,其测站数均应为偶数,由往测转向返测时,两水准标尺应互换位置,并应重新整置仪器。在水准路线上每一测段仪器测站安排成偶数,可以削减两水准标尺零点不等差等误差对观测高差的影响。 (8)每一测段的水准测量路线应进行往测和返测,这样,可以消除或减弱性质相同、正负号也相同的误差影响,如水准标尺垂直位移的误差影响。 (9)一个测段的水准测量路线的往测和返测应在不同的气象条件下进行,如分别在上午和下午观测。 (10)使用补偿式自动安平水准仪观测的操作程序与水准器水准仪相同。观测前对圆水准器应严格检验与校正,观测时应严格使圆水准器气泡居中。