H a r b i n I n s t i t u t e o f T e c h n o l o g y
课程设计报告
课程名称:雷达系统导论
设计题目:自适应波束形成技术
在HF雷达中的应用院系:电子与信息工程学院班级:电子工程一班
设计者:宋孝果
学号:09S005051
哈尔滨工业大学
自适应波束形成技术在HF雷达中的应用
电子工程,宋孝果,09S005051
摘要本文首先简单介绍了天波超视距雷达的一些基本情况,主要分析了前向散射双基地高频雷达(FBB-HF)的工作模式以及存在的主要问题;接着分析了自适应波束形成对干扰的抑制,主要研究了最小方差无畸变响应(MVDR)和最小均方(LMS)算法,并进行了比较。同样条件下,LMS算法性能优越,又可以实时处理,且易于实现。
关键词FBB-HF雷达;自适应波束形成;MVDR算法;LMS算法
1 引言
天波超视距雷达(OTHR)工作在高频波段,它利用地面发射的高频电磁波遇到高空电离层向地面折射的原理,把能量打在视距以外的运动目标上,使其产生反射,凭借庞大的天线和高灵敏度接收机以运动目标的多普勒信号探测超视距目标,其工作频率为3MHz—30MHz,以便可以适应不同高度电离层把电磁波折射到预定的探测空域。天波超视距雷达发射功率长达几百千瓦,探测范围可以远到1000—4000公里。
与一般雷达相比,天波超视距雷达在军事上有以下优点:(1)远程探测和预警能力;(2)对隐身目标的探测能力;(3)对低空目标探测能力;(4)对反辐射导弹有天然的抵抗能力。
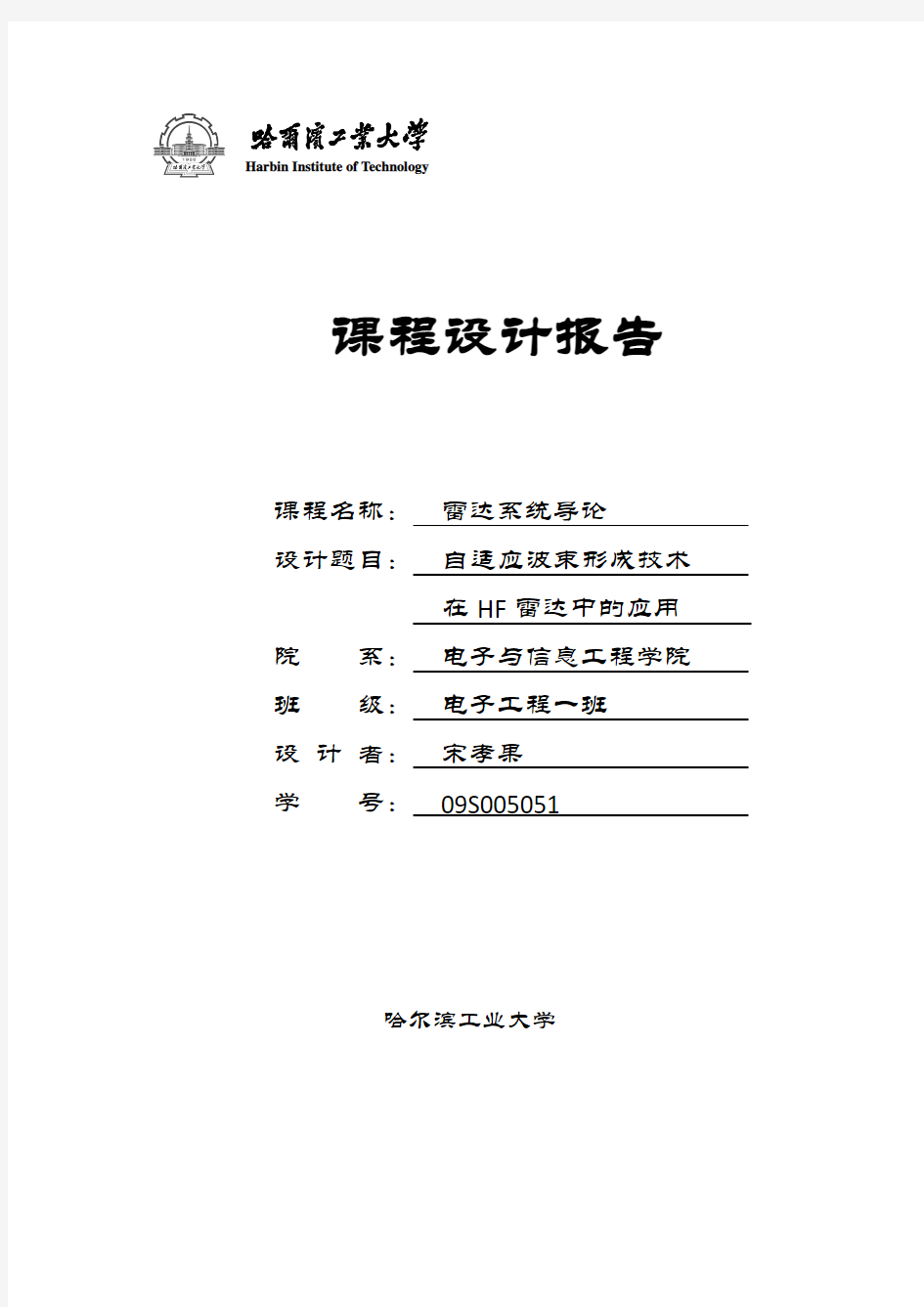
根据天波超视距雷达的工作特点,一般采用双基地模式,其工作方式有两种:后向散射和前向散射。后向散射是目标回波通过电离层反射回到距离发射机不远的接收机;前向散射是目标回波直接被距离目标很近的接收机接收。两种工作方式示意如图1.1[1]。
图1.1 天波超视距雷达工作方式示意图
前向散射双基地高频雷达(FBB-HF)可以利用较少的天线阵元获得较高的增益,可以灵活运用在海岸、舰船等。FBB-HF雷达最主要的问题是存在直达波干
扰,如图1.1中所示,强的直达波干扰将会淹没信号,因此需要对干扰进行抑制。
2 自适应波束形成技术
自适应数字波束形成(ADBF )是自适应天线阵列用于复杂信号环境的一种波控技术。其基本思想是将任一多元阵列的各阵元输出加权求和,依据不同的最优化准则,通过自适应算法,使阵列的输出对不同空间方向的信号产生不同的响应,实现阵列波束指向控制、零陷控制和干扰、旁瓣对消,从而获得对目标的高分辨率。
常用的自适应算法有最小方差无畸变响应(MVDR )、最小均方(LMS )、递推最小二乘(RLS )等,本文主要研究MVDR 和LMS 算法,并进行比较。
2.1 最小方差无畸变响应(MVDR )算法
接收天线为均匀线性阵,阵元数目为N ,()x k 为k 时刻天线接收的数据。
()()()()k k k θx =a s +n (1)
其中()k s 为k 时刻信号采样,()θa 为1N ?信号导向矢量。 波束形成后的输出为
()()H k k =y w x (2)
则MVDR 算法加权值为
-1x 0
H -10x 0
R a w =a R a (3)
其中{()()}H E k k =x R x x 为数据协方差矩阵,其估计值为
1
1()()L
H k k k L ∧
==∑x R x x (4)
2.2 最小均方(LMS )算法
信号模型和波束形成输出如式(1)、(2)所示,最小均方准则就是在m 个线性约束条件下,选择权值w 使得输出功率最小。线性约束形式为H =C w f ,其中C 为N m ?的约束矩阵,f 为1m ?的约束值。最优问题可以表示为如下
argmin =H x w w R w s.t. H =C w f (5)
其中{()()}H E k k =x R x x 为数据协方差矩阵。式(5)的最优解为
1()H -=-1-1x x w R C C R C f (6)
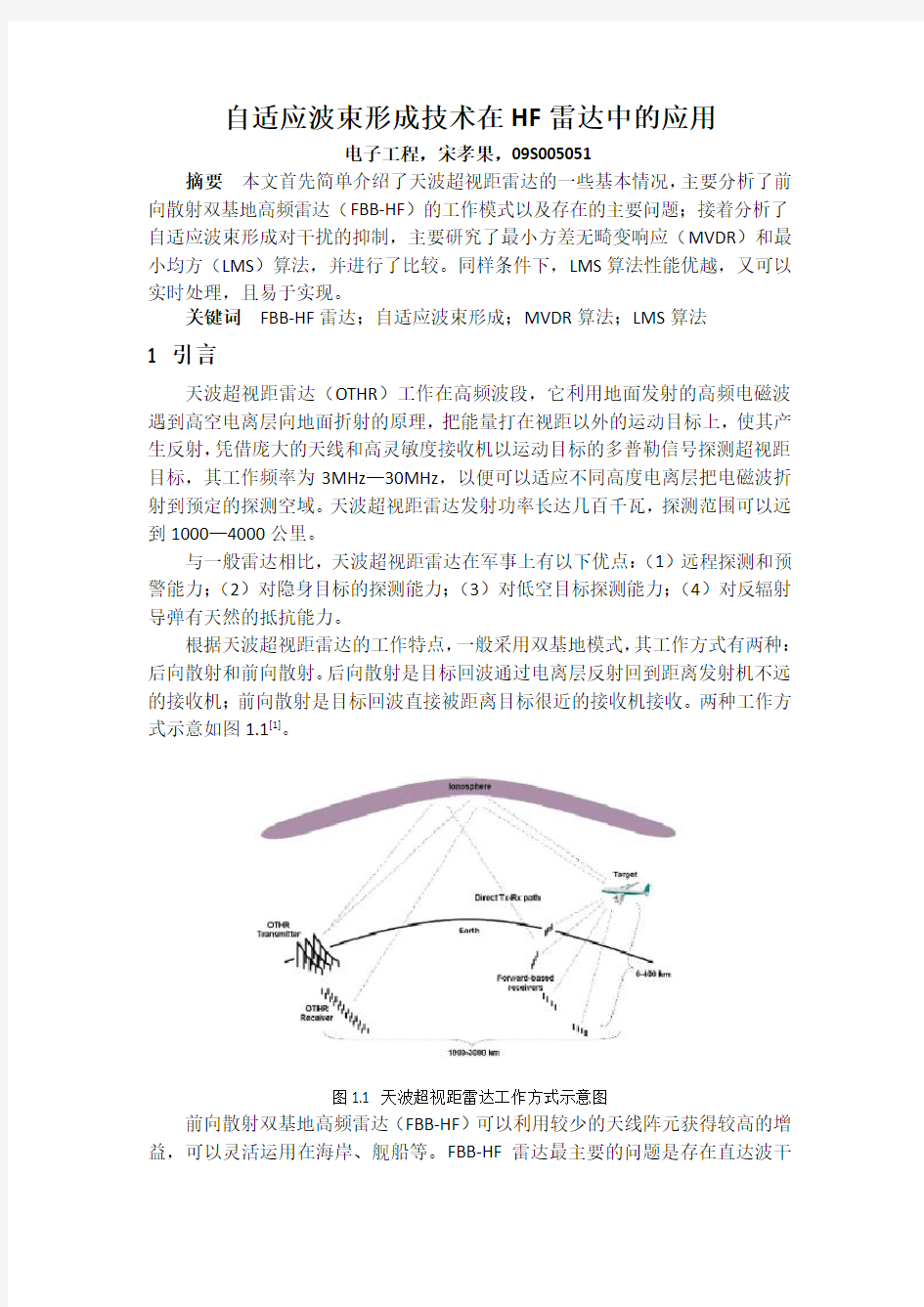
在一般旁瓣对消器中,w 分解为两部分:一部分属于约束子空间,q w ;另一部分与它正交,a w [2]。如图2.1所示。
图2.1 旁瓣对消波束形成器
q a =-w w Bw (7)
q w 为N 1?静态权值
1()H q -=w C C C f (8)
B 为()N N m ?-与
C 正交的矩阵,即H B C =0。a w 为()1N m -?自适应向量,它能自适应地改善抑制干扰的能力。以上问题可以写成无约束条件的最优解问题
argmin()()H a q a q a =--x w w Bw R w Bw (9)
式(9)的最优解为
1()H H a q -=x x w B R B B R w (10)
总结LMS 算法步骤如下[2]: (1) (0)a =w 0 (2) ()()H c q y k k =w x (3) ()()H k k =z B x
(4) ()()(1)()H p c a y k y k k k =--w z
(5) *()(1)()()a a p k k k y k α=-+w w z ,其中α为步长,2
1/()N α=x (6) ()()q a k k =-w w Bw
3 仿真分析
对MVDR 和LMS 算法进行仿真,接收天线为均匀直线阵。
仿真中噪声为加性高斯白噪声,信噪比SNR=10dB 。信号干扰比SIR=-20dB 。 当快拍数L=1000时,结果如图3.2、3.3所示。用MUSIC 算法对接收数据进行扫描,得到信号和干扰方向图,如图3.1所示。
图3.1 用MUSIC 算法扫描信号和干扰方向图
(a) MVDR 算法 (b) LMS 算法
图3.2 快拍次数为1000时波束形成方向图
Angles/degree
幅度/d B
信号和干扰方向
Angles/degree
幅度归一化/d B
Angles/degree
幅度归一化/d B
图3.3 波束形成前后信号频谱
当快拍次数L=100时,结果如图3.4、3.5所示。
(a) MVDR 算法 (b) LMS 算法
图3.4 快拍次数为100时波束形成方向图
图3.5 波束形成前后信号频谱
由图3.2、3.4可知,在同样的快拍次数下,LMS 算法形成的零点比MVDR
ADBF 输出信号
Frequency/Hz
幅度/d B
波束形成方向图
Angles/degree
幅度归一化/d B
波束形成方向图
Angles/degree
幅度归一化/d B
ADBF 输出信号
Frequency/Hz
幅度/d B
深。当快拍次数很少时,数据的协方差矩阵估计不准确,MVDR方向图形成不正确,LMS算法在迭代时不需要计算数据的协方差矩阵,方向图无错误。
由图3.5可知,信号和干扰频率在一个单元上,通过时域谱分析无法分辨开,波束形成后,干扰被抑制,通过谱分析可以观察到信号的频率。
4 结论
MVDR算法和LMS算法波束形成均能形成零点,可以对干扰进行抑制。在同样条件下,LMS算法波束形成的零点比MVDR深,性能稳健。当快拍次数较少时,由于数据协方差矩阵估计不准确,造成MVDR性能下降,波束形成结果有误差。LMS算法不需要估计数据协方差矩阵,算法性能优越。由图2.1可知,LMS算法可以进行实时处理,在实际中有很重要的应用价值。
综合分析,LMS性能比MVDR优越。
5 参考文献
1 G.J.Frazer.Forward-basesd Receiver Argumentation for OTHR.Proc.IEEE Radar Conference.Boston.MA.April 17-20, 2007
2 Z.Tian,K.L.Bell.H.L.Van Tree.A Recursive Least Squares Implementation for LCMP Beamforming Under Quadratic Constraint.IEEE Trans on Signal Processing. 2001,vol.49:1138-1145
6 附录
% =========================================================================
% Adaptive DBF
% MVDR
% LMS
% January 2010
% ========================================================================= clear
close all;
clc
%% set parameters
c=3e8;
fc=10e6; % carrier frequency
lambda=c/fc; % wavelength
M=8; % number of elements
d=lambda/2; % inter-element spacing
%% echos
theta0=10; % signal direction
beta0=2*pi*d*sin(theta0*pi/180)/lambda;
a0=exp(-1i*beta0*(0:M-1)'); % signal steering vector
L=100;
fd=100; % signal frequency
fs=1e3; % sampling frequency
t=0:L-1;
s0=exp(1i*2*pi*fd*t/fs); % signal
theta1=-30; % interference direction beta1=2*pi*d*sin(theta1*pi/180)/lambda;
a1=exp(-1i*beta1*(0:M-1)'); % interference steering vector fd1=110; % interference frequency s1=10*exp(1i*2*pi*fd1*t/fs); % interference SIR=-20dB
A=[a0 a1];
S=[s0;s1];
x=A*S;
SNR=10; % SNR dB
for m=1:M
x(m,:)=x(m,:)+sqrt(0.5*10^(-SNR/10))*(randn(1,L)+1i*randn(1,L));
end
%% beam forming
theta=-90:0.1:90;
N=length(theta);
y=zeros(1,N);
y1=zeros(1,N);
y3=zeros(1,N); % music
y4=zeros(1,N);
%beta3=2*pi*d*sin(-5*pi/180)/lambda;
ConM=[a0,a1]; % constraint matrix
Conf=[1;0]; % constraint values
w2=LMS1(x,beta0,beta1); % LMS
w1=MVDR(x,beta0); % MVDR
w=a0/M;
for n=1:N
beta=2*pi*d*sin(theta(n)*pi/180)/lambda;
a=exp(-1i*beta*(0:M-1)');
y(n)=w'*a;
y1(n)=w1'*a;
y4(n)=w2'*a;
y3(n)=music1(x,beta,2);
end
%% results
y2=w1'*x;
Y2=fftshift(fft(y2));
Y3=fftshift(fft(x(1,:)));
f=-fs/2:fs/L:fs/2-fs/N;
figure,plot(theta,db(y))
hold on
plot(theta,db(y1),'r:')
% hold on
% plot(theta,db(y4),'-.') hold off
title('波束形成方向图') xlabel('Angles/degree') ylabel('幅度归一化/dB') legend('CBF','MVDR') figure,plot(f,db(Y3)) hold on
plot(f,db(Y2),'r')
hold off
title('DBF后信号') xlabel('Frequency/Hz') ylabel('幅度/dB') legend('DBF前','DBF后') figure,plot(theta,db(y3)) xlabel('Angles/degree') ylabel('幅度/dB')
第六部分多普勒天气雷达原理与应用(周长青) 我国新一代天气雷达原理;天气雷达图像识别;对流风暴的雷达回波特征;新一代天气雷达产品 第一章我国新一代天气雷达原理 一、了解新一代天气雷达的三个组成部分和功能 新一代天气雷达系统由三个主要部分构成:雷达数据采集子系统(RDA)、雷达产品生成子系统(RPG)、主用户处理器(PUP)。 二、了解电磁波的散射、衰减、折射 散射:当电磁波束在大气中传播,遇到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。 衰减:电磁波能量沿传播路径减弱的现象称为衰减,造成衰减的物理原因是当电磁波投射到气体分子或云雨粒子时,一部分能量被散射,另一部分能量被吸收而转变为热能或其他形式的能量。 折射:电磁波在真空中是沿直线传播的,而在大气中由于折射率分布的不均匀性(密度不同、介质不同),使电磁波传播路径发生弯曲的现象,称为折射。 三、了解雷达气象方程 在瑞利散射条件下,雷达气象方程为: 其中Pr表示雷达接收功率,Z为雷达反射率,r为目标物距雷达的距离。Pt表示雷达发射功率,h为雷达照射深度,G为天线增益,θ、φ表示水平和垂直波宽,λ表示雷达波长,K表示与复折射指数有关的系数,C为常数,之决定于雷达参数和降水相态。 四、了解距离折叠 最大不模糊距离:最大不模糊距离是指一个发射脉冲在下一个发射脉冲发出前能向前走并返回雷达的最长距离,Rmax=0.5c/PRF, c为光速,PRF为脉冲重复频率。 距离折叠是指雷达对雷达回波位置的一种辨认错误。当距离折叠发生时,雷达所显示的回波位置的方位角是正确的,但距离是错误的(但是可预计它的正确位置)。当目标位于最大不模糊距离(Rmax)以外时,会发生距离折叠。换句话说,当目标物位于Rmax之外时,雷达却把目标物显示在Rmax以内的某个位置,我们称之为‘距离折叠’。 五、理解雷达探测原理。 反射率因子Z值的大小,反映了气象目标内部降水粒子的尺度和数密度,反射率越大,说明单位体积中,降水粒子的尺度大或数量多,亦即反映了气象目标强度大。 反射率因子(回波强度): 即反射率因子为单位体积内中降水粒子直径6次方的总和。 意义:一般Z值与雨强I有以下关系: 层状云降水 Z=200I1.6 地形雨 Z=31I1.71 雷阵雨 Z=486I1.37 新一代天气雷达取值 Z=300I1.4 六、了解雷达资料准确的局限性、资料误差和资料的代表性 由于雷达在探测降水粒子时,以大气符合标准大气情况为假定,与实际大气存在一定的差别,使雷达资料的准确度具有一定的局限性,且由于雷达本身性能差异及探测方法的固有局限,对探测目标存在距离折叠及速度模糊现象,对距离模糊和速度模
探地雷达在桩基检测中的应用 于涛 (中铁十九局集团第三工程有限公司) 摘要介绍了探地雷达工作原理与在桩基中的检测方法,探讨了探地雷达在桩基检测中的应用现状。关键词探地雷达桩基 桩基础属隐蔽工程,为了保证桩基础的安全可靠,桩基的质量检查至关重要。常规桩基工程的检测方法如静载荷试验、高应变、低应变等已经日趋完善,但是随着工程目的的多样化和质量要求的提高,许多建筑工程中的桩基设计和施工工艺较为特殊,使得建立在杆状模型的一维波动方程理论基础之上的常规检测手段无能为力[&]。基于以上情况,常使用地质雷达探测作为桩基常规检测方法的有力补充,这正好发挥了其高分辨率、高准确性的特点,同时可以数据处理和图像解释,有其独特的效果。 地质雷达是目前精度最高的物探仪器之一,广泛应用于工程地质、岩土工程、地基处理、道路桥梁、文物考古、混凝土结构探伤等领域[!]。探地雷达能探测#"’(")深度,一般能满足工程勘测的需要[#]。但对于以钢筋混凝土为主要材料的桩基,其电性性质与周围土体有明显差异,而且介质性质较均匀,探测深度可能会增加,另外雷达剖面会有较好的效果。 &探地雷达的基本原理 探地雷达是利用高频电磁波(&*+,’&-+,)以宽频带短脉冲的形式,在地面通过发射天线(!)将信号送入地下,经地层界面或目的体反射后回到地面,再由接收天线(")接收电磁波反射信号,通过对电磁波反射信号的时域特征和振幅特征进行分析来了解地层或目的体特征信息的方法。 当发射天线向地下发射高频宽频带短脉冲电磁波时,遇到不同介电特性的介质就会有部分电磁波能量返回,接收天线接收反射回波并记录反射时间。电磁波在岩土介质中的传播速度为: !#$%" !. 式中:$为电磁波在真空中的传播速度,约为"/#)?01$&;".为相对介电常数。 电磁波在介质中传播时,其路径$波形将随所通过的介质的电性质及几何形态而变化,根据接收到波的旅行时间(亦即双程走时)、幅度、频率与波形变化资料,可以推断介质的内部结构以及目标的深度、形状等,利用电磁波在介质中的波速和旅行时间可以计算介面深度(&2’3(4!)。当发射天线沿欲探测物表面移动时就能得到其内部介质剖面图像,其工作原理见图& 。反射脉冲的信号强度,与界面的波反射系数和穿透介质的波吸收程度有关。 〔收稿日期〕!""#$"#$!%
国内探地雷达与国外的差别 随着世界经济建设和材料科学的发展,对地下非金属类目标探测技术的需求变得愈来愈迫切,六十年代末期得到发展的时域电磁场理论和相关的电子技术,进一步推动了毫微秒脉冲地下目标探测设备—探地雷达(GPR)的研制和应用。现在,国内外兴起了利用探地雷达进行地下目标无损探测的研究和应用热潮,探地雷达在城建、交通、地质、考古、国防等部门中扮演着越来越重要的角色。 在军方及地质与勘探部门的持续支持下,中国电波传播研究所在地下目标高分辨率探测领域,已开展十余年的研究工作,目前已经研制成功LTD系列多种型号的探地雷达产品,其中全数字化LTD-10一体化探地雷达具备携带方便、功能强、性能稳定等特点,既可以用于公路、隧道面层厚度检测,又可以用于地下较深层目标的探测,已广泛应用于军事和民用各领域。 但随着应用范围的不断拓宽,现场对尚处于成长期的探地雷达提出越来越高的技术要求,其中探测深度和分辨率的矛盾显得越来越明显,作者在此抛砖引玉,希望更多的科研院所、学校和现场应用部门加入到无损探测技术研究中来,通力合作,尽快使电磁波传播理论和探地雷达应用技术有大的突破。 工作原理 LTD探地雷达工作时,在雷达主机控制下,脉冲源产生周期性的毫微秒信号,并直接馈给发射天线,经由发射天线耦合到地下的信号在传播路径上遇到非均匀体时,产生反射信号。位于地面上的接收天线在接收到地下回波后,直接传输到接收机,信号在接收机经过整形和放大等处理后,经电缆传输到雷达主机,经处理后传输到微机。在微机中对信号依照幅度大小进行编码,并以伪彩色电平图/灰色电平图或波形堆积图的方式显示出来,经事后处理,可用来判断地下目标的深度、大小和方位等特性参数。 系统组成 探地雷达系统主要由LTD-10一体化雷达主机、天线、综合控制电缆、测距轮及其它相关配件和随机附送软件组成。 与国外部分品牌主机设计不同,探地雷达采用工控机和雷达主机一体化设计,与随机附送软件(包括实时采集软件和事后处理软件,两者都是全中文界面)配合,利用键盘或鼠标就可完成数据采集和后处理工作。其中,实时采集软件为用户提供分别在DOS和Windows2000
科研报告 课程名称:信号检测与估值 题目:匹配滤波器在雷达信号中的应用院(系):信息与控制工程学院 专业方向:信号与信息处理 姓名:许娟 学号:1508210675 任课教师:毛力 2015 年1月14日
匹配滤波器在雷达信号中的应用 摘要 本文介绍了雷达系统及有关匹配滤波器的主要内容,着重介绍与分析了雷达系统信号处理的脉冲压缩(匹配滤波)现代雷达技术,雷达系统通过脉冲压缩解决解决雷达作用距离和距离分辨力之间的矛盾,最后实现对雷达目标的检测。关键词:雷达系统脉冲压缩
Abstract This paper introduces the radar system and the main content of the matched filter, this paper introduces and analyses emphatically the signal processing of the pulse compression radar system (matched filtering) of modern radar technology, by pulse compression radar system to solve the contradiction between the radar range and distance resolution,finally the realization of the radar target detection. Keywords:pulse compression radar system
一、绪论 雷达:无线电探测与测距。利用电磁波对目标检测、定位、跟踪、成像和识别。 雷达利用目标对电磁波的反射或散射现象来发现目标并测定其位置的。 组成框图 雷达测量原理 雷达发射信号: 雷达接收信号: 雷达利用收发信号之间的相关性获取目标信息 雷达组成: 天线:向确定的方向发射和接收特定频段的电磁波 收发开关: 发射状态将发射机输出功率接到天线,保护接收机输入端 接收状态将天线接收信号接到接收机,防止发射机旁路信号 发射机:在特定的时间、以特定的频率和相位产生大功率电磁波 接收机:放大微弱的回波信号,解调目标信息 雷达的工作频率: 工作频率范围:22mhz--35ghz 扩展范围:2mhz--94ghz 绝大部分雷达工作在:200mhz--10000ghz 雷达的威力范围:最大作用距离、最小作用距离、最大仰角、最小仰角、方位角范围 分辨力:区分点目标在位置上靠近的能力 距离分辨力:同一方向上两个目标之间最小可区别的距离 角度分辨力:在同一距离上的两个不同方向的点目标之间最小能区别的角度 数据率:雷达对整个威力范围内完成一次搜索所需要的时间倒数,也就是单位时间内雷达所能提供对一个目标数据的次数。 跟踪速度:自动跟踪雷达连续跟踪运动目标的最大可能速度 发射功率的和调制波形: 发射功率的大小直接影响雷达的作用距离
发射信号的调制波形: 早期简单脉冲波形,近代采用复杂波形 脉冲宽度:脉冲雷达发射信号所占的时间。影响探测能力和距离分辨力 重复频率:发射机每秒发射的脉冲个数,其倒数是重复周期。决定单值测距的范围,影响不模糊速区域大小 天线波束形状天线:一般用水平面和垂直面内的波束宽度来表示 天线的扫描方式:搜索和跟踪目标时,天线的主瓣按照一定规律在空间所作的反复运动。机械性扫描和电扫描 接收机的灵敏度:通常规定在保证50%、90%的发现概率条件下,接收机输入端回波信号的功率作为接收机的最小可检测信号功率。这个功率越小接收机的灵敏度越高,雷达的作用距离越远。 显示器的形式和数量:雷达显示器是向操纵人员提供雷达信息的一种终端设备,是人际联系的一个环节。 电子战对抗中的雷达: 电子战(EW ):敌我双方利用无线电电子装备或器材所进行的电磁信息斗争,包括电子对抗和电子反对抗。 电子对抗(ECM ):为了探测敌方无线电电子装备的电磁信息(电磁侦察),削弱或破坏其使用效能所采取的一切战术、技术措施(电子干扰、伪装、隐身和摧毁) 电子反对抗(ECCM ):在敌方实施电子对抗的条件下,保证我方有效采用电磁信息所采取的一切战术、技术措施(反侦察、抗干扰、反伪装、反隐身、反摧毁) 雷达反干扰 天线抗干扰:低旁瓣、旁瓣对消、波束控制、随机扫描 发射机抗干扰:提高有效辐射功率、频率捷变、频率编码、频率分集、脉冲压缩、波形隐蔽、窄脉冲、重频时变 接收机、信号处理机抗干扰:接收机抗饱和、重频、脉宽鉴别、MTI 、MTD 、积累检测 二、发射机 发射机任务:产生大功率高频振荡发射信号。脉冲雷达要求发射机产生一定宽度、一定重复频率、一定波形的大功率射频脉冲列 基本类型:连续波发射机、脉冲调制发射机(单极振荡式发射机、主振荡式发射机) 输出功率:发射机送到天线输入端的功率 峰值功率:脉冲期间发射机输出功率的平均值(不要过分增大法设计的峰值功率) 平均功率:脉冲重复周期内输出功率的平均值: 工作比D: 常规脉冲雷达工作比0.001 脉冲多普勒雷达工作比10-2 ~10-1量级 连续波雷达工作比100% 总功率:发射机输出功率与输入功率之比 主振放大式发射机特别注意改善输出级效率 信号形式: 信号形式由雷达体制决定 常规脉冲雷达为简单脉冲波形,特殊体制雷达为复杂调制波形 t r av P T P τ=r r T F D ττ= =
解读我国探地雷达的应用现状及展望 发表时间:2019-04-26T16:27:00.530Z 来源:《基层建设》2019年第4期作者:李柯辉[导读] 摘要:本文从建筑工程质量检测、岩土工程勘察及地质勘探、城市基础设施探测、公路、铁路质量检测、水利工程探测、考古探测、军事及安全领域等方面,对我国探地雷达的应用现状进行了说明,并阐述了我国探地雷达的应用展望,以期为促进我国对探地雷达技术的更好应用,推动我国更多领域的发展提供参考。 广东省公路工程质量监测中心广东广州 510500摘要:本文从建筑工程质量检测、岩土工程勘察及地质勘探、城市基础设施探测、公路、铁路质量检测、水利工程探测、考古探测、军事及安全领域等方面,对我国探地雷达的应用现状进行了说明,并阐述了我国探地雷达的应用展望,以期为促进我国对探地雷达技术的更好应用,推动我国更多领域的发展提供参考。 关键词:探地雷达;应用现状;展望引言 就探地雷达而言,其在我国之中也被称为地质雷达,于应用方面主要是通过对频率在106到109Hz的超高频脉冲电磁波的利用,来实现对地下介质所具有的分布特征方面的有效探测的一种地球物理方法,且在近年来的不断发展之中,其在应用范围方面也愈加广阔,呈现出一片大好的应用前景。 一、我国探地雷达的应用现状 (一)在建筑工程质量检测之中的应用对于建筑工程领域而言,其一系列工作的开展,都需要相应的数据作为支撑,也就是说其对于数据本身的可靠性方面的要求较高,但就实际情况而言,其中包含了很多具有较高隐蔽性的工程,若仅仅通过常规手段展开数据的获取,则存在较大的困难。但就我国当前阶段的探测雷达技术应用而言,其在建筑工程质量检测领域之中的应用具有较为良好的成效,能够对以上的问题良好的解决,其能够针对建筑工程建设施工之中,缺陷部位与完好部位介质之间的介电常数差异性的对比,来对其中存在的较为隐蔽的质量缺陷良好的探测出来,以便于对缺陷部位问题进行及时的了解及补救。在探地雷达技术实际应用于建筑工程质量检测之中时,其往往是在建筑物的结构及探伤、混凝土浇筑的质量、保护层厚度及其中钢筋的分布情况等方面发挥相应的探测作用。 (二)在岩土工程勘察及地质勘探之中的应用在岩土工程勘察及地质勘探工作的开展之中,常规的地质勘查方法都是以钻孔勘查为主,其虽然发挥了一定的作用,但因勘查的过程之中其钻孔的数量毕竟有限,使之难以对工程建设开展区域地下地层的分布情况及相应的特征全面的掌握,这便会对工程实际的建设开展带来一定的质量及安全方面的隐患。此时,在建设所在区域地质勘查工作之中对探地雷达加以应用,能够对其快速且大面积普查的优势加以发挥,进而能够对传统钻孔勘查的缺陷加以弥补,实现对地下之中的障碍物分布情况、回填土所具有的厚度、地下断裂发育以及地层分层特征等方面的情况及内容拥有较为全面的了解,进而能够为岩土工程整体设计施工的开展提供有利依据。此外,在实际开展岩土工程勘察及地质勘探时,将探地雷达技术与其他技术相结合,能够实现对地基及矿产资源调查、地层划分、断层及断裂查找、水文地质勘察等方面情况的良好勘察,以便于拥有更高依据的开展施工操作。 (三)在城市基础设施探测之中的应用在城市整体的运行过程之中,其基础设施探测工作的开展必不可少,且所包含的内容较多,有地下空洞、金属及非金属管线探索、突发工程事故抢险、城市路面坍塌等等,但又因为城市之中本身的环境条件较为复杂,存在电磁干扰、机械振动等多方面的干扰源,致使大多数探测方法的开展都难以达到相应的探测效果。此时,应用探地雷达技术其本身的天线具有一定的屏蔽功能,使之能够无惧干扰正常开展探测工作,尤其是在桩基及复合地基等基础工程之中,能够实现对地基加固效果方面的准确检测。 (四)在公路、铁路质量检测之中的应用随着近年来我国公路及铁路领域的飞速发展,因探地雷达技术本身所具有的优势,使之在以上领域之中获得了较为广泛的应用,对其分别进行说明,则可分为以下几点。第一点,在公路建设方面,充分发挥了探地雷达的探测精度及速度方面的优势,使之能够在公路路基、路基病害检测、桥梁结构及沥青厚度的检测方面良好的发挥作用,经由相应的雷达图像,能够实现对缺陷部位的清晰观看。第二点,在铁路建设方面,探地雷达技术已经在包括翻浆、裂缝、孔洞等在内的路基病害检测、路基岩溶、采空区等方面的探测工作之中发挥了作用,并达到了较为良好的应用效果。就近年来的发展情况来看,探地雷达于铁路路基领域之中的应用,已经由原本的未经运营状态之下得到铁路线路探测,逐渐向处于通车运行状态之下的铁路线路方向发展,且正在着力开展轨道车载式铁路路基质量检测系统的大力研发工作[1]。 (五)在水利工程探测之中的应用就探地雷达技术而言,其在我国水利工程领域之中的应用,主要是在工程开展前期的滑坡体与基岩埋深方面的勘察工作,中期的水利工程施工质量、堤坝隐患探测等方面的应用,不仅仅能够对整体的施工开展及施工质量提供保障,还能够对施工整体的进度及质量控制工作的开展达到一定的促进作用。其中,探地雷达应用效果最佳的便是在水利工程的质量检测及地把隐患问题的探测方面,仅仅在这两个方面的应用,便已经帮助水利工程建设解决了诸多的施工问题[2]。 (六)在考古探测之中的应用在考古这一领域之中,探地雷达技术的应用本身便拥有较高的优势,其能够通过其优越的低下探测能力,实现对低些埋藏物、地下墓穴、古遗址及古文化层埋深等方面的良好探测及调查,进而能够提升考古的整体水平,但就当前阶段的发展而言,虽然我国于此方面的起步较晚,但到目前为止已经取得了一定的成就,如我国的中国地质大学便利用这一技术,开展了针对位于甘肃省的敦煌莫高窟这一古遗迹的探索及研究工作。 (七)在军事及安全领域之中的应用就我国而言,与国外的许多国家相比,将探地雷达技术应用于军事及安全领域的开展年限较短,于我国而言仍旧属于拓展及探索领域,到目前为止其主要是在建筑物内的隐蔽物、地下隐蔽物及战争遗留未爆炸物等方面的探测之中加以应用,可以达到较好的开展效果,具有较好的应用前景。
现代雷达信号处理技术及发展趋势 摘要:自二战以来,雷达就广泛应用于地对空、空中搜索、空中拦截、敌我识别等领域,后又发展了脉冲多普勒信号处理、结合计算机的自动火控系统、多目标探测与跟踪等新的雷达体制。随着科技的不断进步,雷达技术也在不断发展,现代雷达已经具备了多种功能,如反隐身、反干扰、反辐射、反低空突防等能力,尤其是在复杂的工作环境中提取目标信息的能力不断得到加强。例如,利用雷达系统中的信号处理技术对接收数据进行处理不仅可以实现高精度的目标定位与跟踪, 还能够在目标识别和目标成像、电子对抗、制导等功能方面进行拓展, 实现综合业务的一体化。 一、雷达的起源及应用 雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。雷达最为一种重要的电磁传感器,在国防和国民经济中应用广泛,最大特点是全天时、全天候工作。雷达由天线、发射机、接收机、信号处理机、终端显示等部分组成。 雷达的出现,是由于二战期间当时英国和德国交战时,英国急需一种能探测空中金属物体的雷达(技术)能在反空袭战中帮助搜寻德国飞机。二战期间,雷达就已经出现了地对空、空对地(搜索)轰炸、空对空(截击)火控、敌我识别功能的雷达技术。二战以后,雷达发展了单脉冲角度跟踪、脉冲多普勒信号处理、合成孔径和脉冲压缩的高分辨率、结合敌我识别的组合系统、结合计算机的自动火控系统、地形回避和地形跟随、无源或有源的相位阵列、频率捷变、多目标探测与跟踪等新的雷达体制。后来随着微电子等各个领域科学进步,雷达技术的不断发展,其内涵和研究内容都在不断地拓展。雷达的探测手段已经由从前的只有雷达一种探测器发展到了红外光、紫外光、激光以及其他光学探测手段融合协作。
脉冲压缩雷达的仿真脉冲压缩雷达与匹配滤波的MATLAB仿真 姓名:-------- 学号:---------- 2014-10-28 西安电子科技大学
一、 雷达工作原理 雷达,是英文Radar 的音译,源于radio detection and ranging 的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。利用电磁波探测目标的电子设备。发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。 雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform ),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。 但是因为普通脉冲在雷达作用距离与距离分辨率上存在自我矛盾,为了解决这个矛盾,我们采用脉冲压缩技术,即使用线性调频信号。 二、 线性调频(LFM )信号 脉冲压缩雷达能同时提高雷达的作用距离和距离分辨率。这种体制采用宽脉冲发射以提高发射的平均功率,保证足够大的作用距离;而接受时采用相应的脉冲压缩算法获得窄脉冲,以提高距离分辨率,较好的解决雷达作用距离与距离分辨率之间的矛盾。 脉冲压缩雷达最常见的调制信号是线性调频(Linear Frequency Modulation )信号,接收时采用匹配滤波器(Matched Filter )压缩脉冲。 LFM 信号的数学表达式: (2.1) 其中c f 为载波频率,()t rect T 为矩形信号: (2.2)
1 多普勒天气雷达主要由几个部分构成?每个部分的主要功能是什么? 答:主要由雷达数据采集子系统(RDA ),雷达产品生成子系统(RPG ),主用户终端子系统(PUP )三部分构成。RDA 的主要功能是:产生和发射射频脉冲,接收目标物对这些脉冲的散射能量,并通过数字化形成基本数据。RPG 的主要功能是:由宽带通讯线路从RDA 接收数字化的基本数据,对其进行处理和生成各种产品,并将产品通过窄带通讯线路传给用户,是控制整个雷达系统的指令中心。PUP 的主要功能是:获取、存储和显示产品,预报员主要通过这一界面获取所需要的雷达产品,并将它们以适当的形式显示在监视器上。 2 多普勒天气雷达的应用领域主要有哪些? 答:一、对龙卷、冰雹、雷雨大风、暴洪等多种强对流天气进行监测和预警;二、利用单部或多部雷达实现对某个区域或者全国的降水监测;三、进行较大范围的降水定量估测; 四、获取降水和降水云体的风场信息,得到垂直风廓线;五、改善高分辨率数值预报模式的初值场。 3 我国新一代天气雷达主要采用的体扫模式有哪些? 答:主要有以下三个体扫模式:VCP11——规定5分钟内对14个具体仰角的扫描,主要对强对流天气进行监测;VCP21——规定6分钟内对9个具体仰角的扫描,主要对降水天气进行监测;VCP31——规定10分钟内对5个具体仰角的扫描(使用长脉冲),主要对无降水的天气进行监测。 4 天气雷达有哪些固有的局限性? 答:一、波束中心的高度随距离的增加而增加;二、波束宽度随距离的增加而展宽;三、静锥区的存在。 5 给出雷达气象方程的表达式,并解释其中各项的意义。 答: P t 为雷达发射功率(峰值功率); G 为天线增益;h 为脉冲长度; 、 :天线在水平方向和垂直方向的波束宽度; r 为降水目标到雷达的距离; :波长; m :复折射指数; Z 雷达反射率因子。 6 给出反射率因子在瑞利散射条件下的理论表达式,并说明其意义。 答:∑= 单位体积6i D z ,反射率因子指在单位体积内所有粒子的直径的六次方的总和,与波长无 关。 7 给出后向散射截面的定义式及其物理意义。 答: 定义:设有一个理想的散射体,其截面面积为?,它能全部接收射到其 上的电磁波能量,并全部均匀的向四周散射,若该理想散射体返回雷达天线处的电磁波能流密度,恰好等于同距离上实际散射体返回雷达天线的电磁波能流密度,Z R C Z m m r h G p p t r ?=?+-=2 2222223212ln 1024λθ?πθ?λi S s R S 24πσ=
探地雷达在地下管线探测中的应用 张进华,马广玲,姚成虎,缪建文 (南京市测绘勘察研究院,江苏南京 210005) 摘 要:探地雷达技术是如今适应快速、准确、无损地探测地下障碍物而迅速发展的电磁技术。本文通过结合工程实例来探讨探地雷达在地下管线探测中的广泛应用。 关键词:探地雷达;地下管线探测;异常反射 1 前 言 探地雷达(Ground Penetrating Radar,简称GPR)是一种对地下或物体内不可见的目标体或界面进行定位的电磁技术。探地雷达以其探测的高分辨率和高工作效率而成为地球物理勘探的一种有力工具。随着信号处理技术和电子技术的不断发展以及工程实践的增多和经验的丰富积累,探地雷达技术进一步发展,仪器不断更新,应用范围逐步扩大,现已被广泛应用于工程地质勘察、建筑结构调查、无损检测、生态环境等众多领域。本文将以探地雷达在地下管线探测中的应用,说明探地雷达可以有效解决工程上的许多疑难问题,并总结了相关经验和应用效果。 2 探地雷达的原理及工作方法 探地雷达由地面上的发射天线将高频带短脉冲形式的高频电磁波定向送入地下,高频电磁波遇到存在电性差异的地下地层或目标体反射后返回地面,由接收天线接收。高频电磁波在传播时,其路径、电磁场强度与波形将随所通过介质的电性及几何形态而变化,故通过对时域波形的采集、处理与分析,可确定地下界面或地质体的空间位置及结构。 探地雷达通常以脉冲反射波的波形形式记录。波形的正负峰分别以黑白表示,或者以灰阶或彩色表示,这样同相轴或等灰线、等色线即可形象地表征出地下反射面或目标体。在波形图上各测点均以测线的铅垂反向记录波形,构成雷达剖面。根据雷达剖面图便可 收稿日期:2003-07-09判断地下不明障碍物。探地雷达在地下介质中的传播遵循波动方程理论。探地雷达的探测效果主要取决于地下目标体与周围介质的电磁性质差异、目标体的深度与介质对电磁波的吸收作用、目标体的几何形态及规模、干扰波的类型、强度及特点等因素。 探地雷达具有不同的野外工作方法,根据工作区的具体情况可选择剖面法、多次覆盖法以及宽角法等测量方式。实际工作中,测量参数(发射接收天线距、时窗、测点点距、天线中心频率、采样率等)可根据不同要求进行选择,从而得到不同分辨率及不同探测精度的雷达剖面。通常在进入工作区前,应有目的地进行类似场地条件的参数选择试验,以达到最佳探测效果。在进入工作区后应根据实际需要布置测线和测点,并让测线和测点尽量通过被测目的物。在不明显的目的物上进行探测时应尽量加密线距和点距,以利于后面的资料处理与解释。 3 探地雷达的数据资料解释处理及在地下管线探测中的应用效果 近几年来,我们采用加拿大生产的pulse EKKO-100A型探地雷达从事了数百次的地下管线探测工作,取得了丰富的探地雷达探测资料及很好的应用效果。 3.1 资料的处理及解释 探地雷达探测资料的解释包括数据处理和图像解释两部分内容。由于地下介质相当于一个复杂的滤波器,介质对电磁波的不同程度吸收及介质的不均匀性, 63城 市 勘 测2004年
基本雷达信号处理流程 一、脉冲压缩 窄带(或某些中等带宽)的匹配滤波: 相关处理,用FFT 数字化执行,即快速卷积处理,可以在基带实现(脉冲压缩) 快速卷积,频域的匹配滤波 脉宽越小,带宽越宽,距离分辨率越高 ; 脉宽越大,带宽越窄,雷达能量越小,探测距离越近; D=BT (时宽带宽积); 脉压流程: 频域:回波谱和参考函数共轭相乘 时域:相关 即输入信号的FFT 乘上参考信号FFT 的共轭再逆FFT ; Sc=ifft(fft(Sb).*conj(fft(S))); FFT 输入信号 共轭相乘逆FFT 参考信号的FFT 匹配滤波器 输出 Task1 f0=10e9;%载频tp=10e-6;%脉冲宽度B=10e6;%信号带宽fs=100e6;%采样率 R0=3000;%目标初始距离N=4096;c=3e8;tau=2*R0/c;beita=B/tp;t=(0:N-1)/fs; Sb=rectpuls(t-tp/2-tau,tp).*exp(j*pi*beita*(t-tp/2-tau).^2).*exp(-2j*pi*f0*tau);%回波信号 1000 2000 3000 4000 5000 6000 7000 -1-0.8-0.6-0.4-0.200.20.40.60.81 1000 2000 3000 4000 5000 6000 7000 -1-0.8-0.6-0.4-0.200.20.40.60.81 012345678910 x 10 7 20 40 60 80 100 120
S=rectpuls(t-tp/2,tp).*exp(i*pi*beita*(t-tp/2).^2);%发射信号(参考信号) 0.5 1 1.5 2 2.5 3 3.5 4 4.5x 10 -5 -1-0.8-0.6-0.4-0.200.20.40.60.81 0.5 1 1.5 2 2.5 3 3.5 4 4.5x 10 -5 -1-0.8-0.6-0.4-0.200.20.40.60.81 012345678910x 10 7 20 40 60 80 100 120 So=ifft(fft(Sb).*conj(fft(S)));%脉压 figure(7); plot(t*c/2,db(abs(So)/max(So)))%归一化dB grid on 01000200030004000500060007000 -400 -350-300-250-200-150-100-500
雷达有关性能与电子战的概述 学院;心理学院应用心理一班赵耀龙 学号; 200900430145 序:雷达具有发现目标距离远,测定目标坐标速度快,能全天候使用等特点。因此在警戒、引导、武器控制、侦察、航行保障、气象观测、敌我识别等方面获得广泛应用,成为现代战争中一种重要的电子技术装备。而诞生的电子战将不可避免的与雷达技术有密切的联系,而雷达性能的好坏将不可避免的影响信息战的胜负,进而决定战争的胜败。本文就雷达与电子战有关的部分性能进行探讨。 The radar has the discovery object distance to be far, the positioning of the target coordinates speed is quick, can characteristics and so on all-weather use.Therefore in aspects and so on security, guidance, weapon control, reconnaissance, navigation safeguard, meteorological observation, foe identification obtains
the widespread application, becomes in the modern warfare one kind of important electronic technology equipment.But is born the electronic combat general inevitable has the close relation with the radar technology, but radar performance quality inevitable influence weapon of information victory and defeat, then decision war victory or defeat.This article carries on the discussion on the radar and the electronic warfare related partial performance. 关键词:干扰反干扰侦察反侦察 雷达(radar)概念形成于二十世纪初。雷达是英文radar的音译,为Radio Detection And Ranging的缩写,意为无线电检测和测距的电子设备。其基本功能是利用目标对电磁波的散射而发现目标,并测定目标的空间位置。随着电子技术的进步,电子装备的发展及其在战争中的作用和地位不断提高而衍生出了电子战并且电子战也在不断地演变和深化。电子战最早发生于1904年,开始,电子战仅限于无线电报中的电子对抗。后来发明了雷达,有了军事上的"千里眼"。作战的敌对一方就千方百计地想蒙住另一方的"千里眼",于是就有了雷达对抗。第二次世界大战中,无线电电子设备在军事上大量使用。敌对双方千方百计使敌方电子设备失效或降低效能,同时又想方设法保证己方的电子设备
雷达与声纳的共性及差别是什么? 雷达是利用无线电技术进行侦察和测距的设备。它可以发现目标,并可决定其存在的距离及方向。雷达将无线电波送出,然后经远距离目标物的反射,而将此能量送回雷达的记发机。记发机与目标物间的距离,可由无线电波传雷达的目标物,再由目标物回到雷达所需的时间计算出。雷达的基本原理与无线电通讯系统的原理同时被人所发现。赫兹与马可尼两人都曾用超短波试验其反射情形,这也就是所谓雷达回波。赫兹用金属平面及曲面证明,电波的反射完全合乎光的反射定律。同时赫兹度量脉冲的波长及频率,并且计算其速度也发现与光相同,这也就是所谓的电磁辐射。雷达送出短暂的电波讯号的程序,称为脉冲程序。雷达的基本作用原理有些相似于声波的回声。唯一与声波测量距离的不同点,在于雷达系统具有一指示器,指示器中包含有一个与电视收像管相同的观察管。此管可将雷达所发出的脉冲及回波,同时显示于其标有距离的基线上。还有其他指示器,使雷达借天线所搜索的资料,制成一个图,从图上立即可以定出目标物的区域距离及方向。因为雷达的作用完全是借电波的反射原理而成,所以必须用频率在1000兆赫到10 000兆赫的类光微波方行。雷达所发射的电波可借抛物面形的反射器,使其成为极度聚焦的波束,这就像探照灯所射出的光束一样。此波束借旋转天线及抛物体形反射器的精密控制,有系统地对空间进行搜索。当波束从目标物反回来时,天线所指的方向,就表示目标物对天线的水平方位角。以角度为单位所表示的水平方位角,通常都显示于指示器上。为了决定目标物与雷达间的距离,雷达的发射脉冲距接收到回波的时间,必须精确测定。因为雷达电波在空中以每秒约30万公里的光速进行,因此在每微秒的时间内,电波行进约为300米。由于雷达脉冲必须从雷达行至目标物,再由目标物回到雷达,但目标物距雷达的距离,为雷达脉冲总行程的一半。约为每微秒l50米。此时间可利用电子束在阴极射线管的屏幕上,以直线扫描指示出。借电子束,以已知变动率(如以每微秒0.01米)作水平偏向,因此电子束打在萤光屏上所留的痕迹,就形成一个时间标度,或直接用尺,来表示。如雷达天线送出一个1微秒长的脉冲,同时指示器的阴极射线管电子束在屏幕上,以每100微秒0.0254米的变动率开始扫描。再假设雷达脉冲在30000米的距离从一飞机反射回天线。当1微秒长的脉冲离开天线的同时,在雷达指示器的左侧也显示出一个0.025厘米长的主脉冲(发射脉冲)。由天线发射的脉冲,到飞机进行了30000米的距离,需时100微秒,然后反回天线也需100微秒。结果微弱的脉冲回波也显示于指示器上,其与主脉冲之间有5厘米的距离,或指示为200微秒。由于脉冲本身有1微秒的长度,所以量度距离时,必须量度两脉冲的前缘间距离。由于回波信号太弱,所以一个单一回波信号显示于指示器,很难被发现。因此回波信号,必须于每秒内,在指示器上重复显示数次,显示的方法是借电子束随天线扫描的速率(通常天线以每分钟15到20转转动)在指示器上扫描而得。雷达无论在平时及战时,都已被广泛的应用。在二次世界大战时使用雷达的目的,只是为了预知敌机的接近。用于预警网的预警雷达,预警雷达天线都是极大的转动抛物面形反射天线,或静止双极矩阵天线。战时雷达的应用很快就被扩展到地面拦截控制,以及高射炮和探照灯的方向控制等。这些所谓的射击控制雷达不仅能察知敌机的所在,并能自动决定高射炮的发射方向及使其发射。由于雷达可度量其与目标物间的距离,当然也可以从飞机上测量距地面的垂直高度。常用的各种脉冲式雷达就可度量一架飞机的高度,供飞行员飞行的参考。然而对很低的高度(低于1000米),因距离太近,脉冲式雷达的回波有与其发射出的主脉冲合并的趋势。因此大多数雷达测高仪都不用脉冲输出,而用等幅调频电波。雷达测高仪的发射天线,送出一垂直无线电波束,此电波的频率连续不断的变化。当信号离开发射天线的瞬间,其信号的频率为某一频率。然后当信号由地反射回到测高仪的接收天线后,因接收机内有一相位鉴别器(或简称为鉴相器),鉴相器可将接收到的回波,与正在发射出的
摘要 雷达通过对回波信号进行接收检测处理来识别复杂回波中的有用信息.其中,雷达信号波形的选择与设计有着相当重要的作用,它直接影响到雷达发射机形式的选择、信号处理方式、雷达的作用距离及抗于扰、抗截获等很多重要问题。所以,为了选择或者设计出适合特定用途的雷达信号形式,在对雷达系统设计之前有必要研究各种雷达信号的性能。雷达信号模糊函数全面地反映了雷达所发射的信号在距离和速度二维上的测量精度和分辨率,因此,雷达信号模糊函数理论对于雷达最优波形设计具有非常重要的意义。 现代信息技术的发展对现代雷达系统在有效作用距离、分辨率、测量精度以及电子对抗诸多方面提出了越来越高的要求。针对现代雷达的特殊用途,模糊函数理论为系统研究最优波形提供了基本的研究平台。模糊函数把雷达接收机输出信号的复包络描述为雷达目标距离和径向速度的函数,它可以提供分辨力、测量精度和杂波抑制等重要信息。模糊函数可以作为单一目标距离和速度的精度与分辨率评估尺度参数,根据这些参数还可以可靠区分多个目标.采用仿真的方法对雷达信号及其性能进行研究具有许多优越性。首先,通过仿真可以在不更改主要的硬件和软件的情况下,灵活地选择和改变参数值。第二,仿真可使雷达信号的设计人员通过改变参数,评价不同作战环境下各种参数对雷达系统性能的影响。第三,对关键技术及参数在仿真中加以研究,可节省大量的人力、物力和财力,并且具有很高的灵活性和可重复性,从而达到节省研制费用、缩短研制周期的目的。 本文基于雷达信号波形设计,从几类雷达发射信号出发,推导出不同雷达信号的模糊函数的数学模型,并绘制出模糊函数图,根据模糊函数图分析各类信号特点。在此基础上,根据雷达系统的要求(如分辨力、精度、抗干扰等),对线性调频信号雷达进行了仿真实验,评估所设计雷达信号的实用的价值。本文在波形设计过程中主要采用Matlab对各模块进行功能建模和仿真,取得了较好的仿真效果。仿真研究表明,模糊函数全面反映了雷达所发射的信号在距离和速度上的测量精度和分辨能力。在给定目标环境的条件下,模糊函数可以作为设计和选择合适的雷达信号的重要方法。 关键词:雷达信号,波形设计,模糊函数。模糊函数图 第1章引言 随着我国科学事业的迅速发展,雷达研制已进入一个崭新的阶段。人造地球卫星、飞船、火箭、导弹的发射成功,都离不开高精度的雷达设备,目标分辨已成为雷达设计中突出的实际问题。模糊函数是对雷达信号进行分析研究和波形设计的有效工具,是雷达信号理论中极为重要的一个概念。模糊函数最初是在研究雷达目标分辨力问题时提出的,并从衡量两个不同距离和不同径向速度目标的分辨度出发提出了模糊函数的定义。但模糊函数不仅可以说明分辨力,还可以说明测量精度,测量模糊度以及抗干扰状况等问题。 1.1雷达信号模糊函数研究的重要意义
探地雷达原理及应用读书报告 班级:061094班姓名:洪旭程学号:20091001724 探地雷达探测是一种先进的测试技术,是近十余年发展起来的地球物理高新技术方法,以其分辨率高、定位准确、快速经济、灵活方便、剖面直观、实时图像显示等优点,备受广大工程技术人员的青睐。现已成功地应用于岩土工程勘察、工程质量无损检测、水文地质调查、矿产资源研究、生态环境检测、城市地下管网普查、文物及考古探测等众多领域,取得了显著的探测效果和社会经济效益,并在工程实践中不断完善和提高,必将在今后的工程探测领域发挥着愈来愈重要的作用。因此,对广大工程技术人员来说,了解和学习探地雷达的原理及应用是非常必要的。 探地雷达探测技术在方法、仪器等方面仍在发展,其分辨率和探测范围也在不断的提高和扩大,比如美国地球物理调查系统公司( Geophysical Survey System Inc. ) 的SIRO10H 仪器,其标称的最小探测深度为4 cm ,最大探测深度为50 m ,最小可探测对象尺度为毫米级。但探地雷达探测技术与其它的地球物理勘查技术一样,其探测效果与其应用条件密切相关。 一、探地雷达的工作原理 探地雷达探测的工作原理,简单地说是通过特定仪器向地下发送脉冲形式的高频、甚高频电磁波。电磁波在介质中传播,当遇到存在电性差异的地下目标体,如空洞、分界面等时,电磁波便发生反射,返回到地面时由接收天线所接收。在对接收天线接收到的雷达波进行处理和分析的基础上,根据接收到的雷达波形、强度、双程时间等参数便可推断地下目标体的空间位置、结构、电性及几何形态,从而达到对地下隐蔽目标物的探测(如图1 所示) 。这是一种非破坏性的探测技术,可以安全地用于城市建设中的工程场地,并具有较高的探测精度和分辨率。 图1 中T 为发射天线, R 为接收天线,电磁波在地下介质中遇到目标体和基岩时发生反射, 信号返回地面由天线R 接收并记录,通过主机的回放处理,就可以得到雷达记录的回波曲线(如图2 所示) 。
第六部分 多普勒天气雷达原理与应用(周长青) 我国新一代天气雷达原理;天气雷达图像识别;对流风暴的雷达回波特征;新一代天气雷达产品 第一章 我国新一代天气雷达原理 一、了解新一代天气雷达的三个组成部分和功能 新一代天气雷达系统由三个主要部分构成:雷达数据采集子系统(RDA )、雷达产品生成子系统(RPG )、主用户处理器(PUP )。 二、了解电磁波的散射、衰减、折射 散射:当电磁波束在大气中传播,遇到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。 衰减:电磁波能量沿传播路径减弱的现象称为衰减,造成衰减的物理原因是当电磁波投射到气体分子或云雨粒子时,一部分能量被散射,另一部分能量被吸收而转变为热能或其他形式的能量。 折射:电磁波在真空中是沿直线传播的,而在大气中由于折射率分布的不均匀性 (密度不同、介质不同),使电磁波传播路径发生弯曲的现象,称为折射。 2 /3730/776.0T e T P N +=波束直线传播 波束向上弯曲波束向下弯曲000=> 最大不模糊距离:最大不模糊距离是指一个发射脉冲在下一个发射脉冲发出前能向前走并返回雷达的最长距离,Rmax=0.5c/PRF, c 为光速,PRF 为脉冲重复频率。 距离折叠是指雷达对雷达回波位置的一种辨认错误。当距离折叠发生时,雷达所显示的回波位置的方位角是正确的,但距离是错误的(但是可预计它的正确位置)。当目标位于最大不模糊距离(Rmax )以外时,会发生距离折叠。换句话说,当目标物位于Rmax 之外时,雷达却把目标物显示在Rmax 以内的某个位置,我们称之为‘距离折叠’。 五、理解雷达探测原理。 反射率因子Z 值的大小,反映了气象目标内部降水粒子的尺度和数密度,反射率越大,说明单位体积中,降水粒子的尺度大或数量多,亦即反映了气象目标强度大。 反射率因子(回波强度): ?=dD D D N Z 6)( 0lg 10Z Z dBZ ?= 360/1m mm Z = 即反射率因子为单位体积内中降水粒子直径6次方的总和。 意义:一般Z 值与雨强I 有以下关系: 层状云降水 Z=200I1.6 地形雨 Z=31I1.71 雷阵雨 Z=486I1.37 新一代天气雷达取值 Z=300I1.4 六、了解雷达资料准确的局限性、资料误差和资料的代表性 由于雷达在探测降水粒子时,以大气符合标准大气情况为假定,与实际大气存在一定的差别,使雷达资料的准确度具有一定的局限性,且由于雷达本身性能差异及探测方法的固有局限,对探测目标存在距离折叠及速度模糊现象,对距离模糊和速度模糊的处理等,均增大了雷达资料的误差。虽然如此,由于径向速度是从多个脉冲对得到的径向速度的平均值,为平均径向速度,雷达反射率因子通过对沿径向上的四个取样体积平均得到的,其径向分辨率相当于四个取样体积的长度,这也使雷达探测的资料具有一定的代表性。 第二章 天气雷达图像识别 一、掌握多普勒效应 多普勒效应为,当接收者或接受器与能量源处于相对运动状态时,能量到达接受者或接收器时频率的变化。多普勒频率,是由于降水粒子等目标的径向运动引起的雷达回波信号的频率变化,也称为多普勒频移,其与目标的径向运动速度成正比,与多普勒天气雷达波长成反比。 二、了解多普勒天气雷达测量反射率因子、平均径向速度和速度谱宽的主要技术方法 多普勒雷达利用降水粒子的后向散射与多普勒效应来达到对其探测的目的。通过发射信号与接收信号的延迟来测量距离,通过降水粒子的多普勒频移来测量其速度。 反射率因子:雷达的反射率因子是降水粒子后向散射被雷达天线接收到的回波,为单位体积内中降水粒子直径6次方的总和,反射率因子Z 值的大小,反映了气象目标内部降水粒子的尺度和数密度,反射率越大,说明单位体积中,降水粒子的尺度大或数量多。
相关主题
文本预览