
工程测量计算之-----(一)坐标正反算详解
一、方位角、坐标方位角
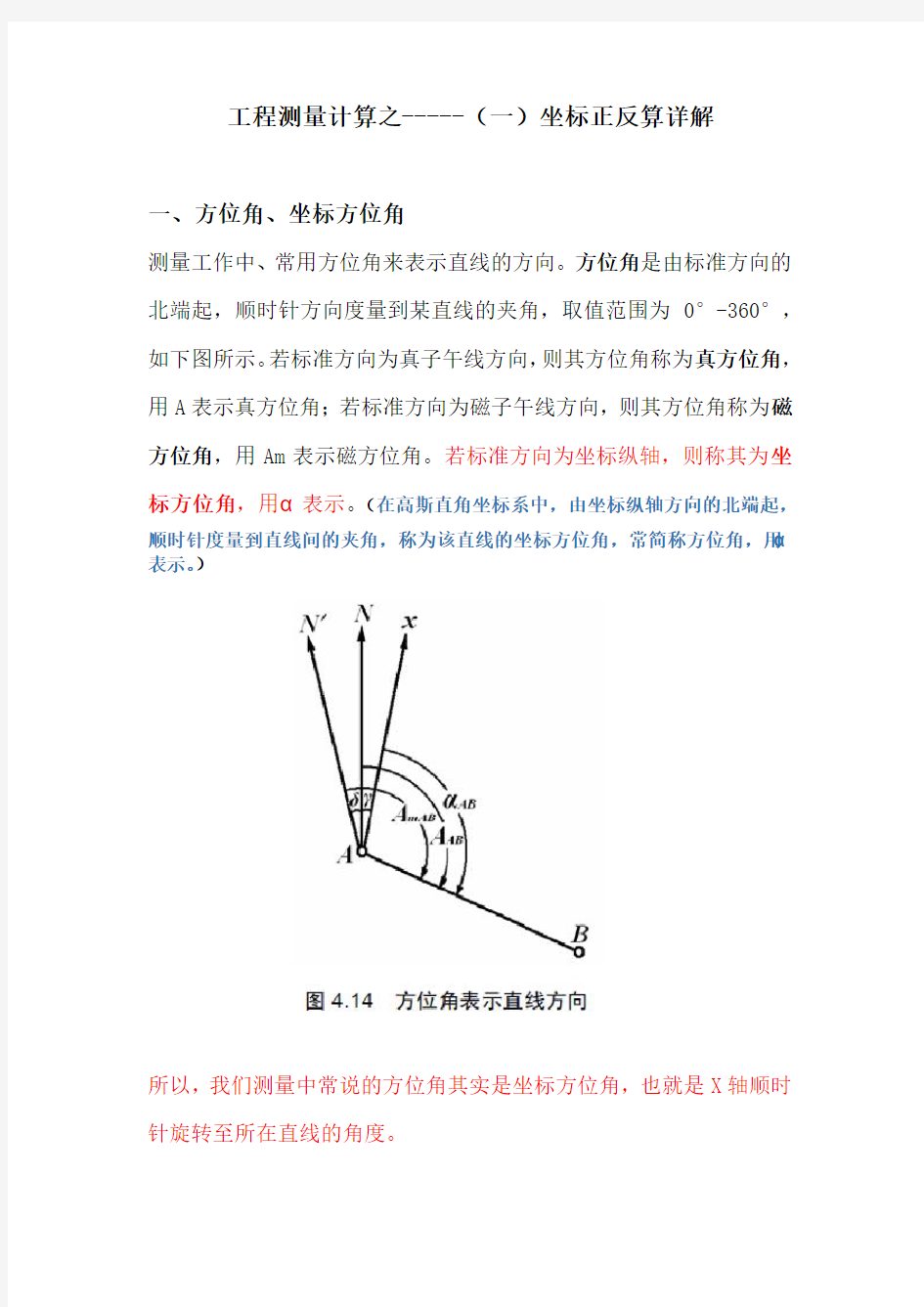
测量工作中、常用方位角来表示直线的方向。方位角是由标准方向的北端起,顺时针方向度量到某直线的夹角,取值范围为0°-360°,如下图所示。若标准方向为真子午线方向,则其方位角称为真方位角,用A表示真方位角;若标准方向为磁子午线方向,则其方位角称为磁方位角,用Am表示磁方位角。若标准方向为坐标纵轴,则称其为坐标方位角,用α表示。(在高斯直角坐标系中,由坐标纵轴方向的北端起,
顺时针度量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。)
所以,我们测量中常说的方位角其实是坐标方位角,也就是X轴顺时
针旋转至所在直线的角度。
二、象限角
以基本方向北端或南端起算,顺时针或逆时针方向量至直线的水平角,称为象限角,用R表示。象限角不但要表示角度大小,而且还要注明该直线所在的象限。
从坐标纵轴的北端或南端顺时针或逆时针起算至直线的锐角称为坐标象限角。其角值变化从0°~90°,为了表示直线的方向,应分别注明北偏东、北偏西或南偏东、南偏西。如北东85°,南西47°等。显然,如果知道了直线的方位角,就可以换算出它的象限角,反之,知道了象限也就可以推算出方位角。
三、坐标正反算公式详解
坐标正算
根据直线的坐标方位角、边长和一个已知端点的坐标计算直线上另一端点坐标的过程。
或若两点间的平面位置关系由极坐标化为直角坐标,称为坐标正算。
1、坐标计算条件
①起算点(定位点)的平面坐标(X0,Y0),
②起算点至待求点的坐标方位角α,
③起算点至待求点的平面距离D。
2、坐标计算过程
坐标反算
根据两已知点的平面坐标,计算该直线的方位角及两点间平面距离的过程。
或若两点间的平面位置关系由直角坐标化为极坐标,称为坐标反算。
α=arctan(△y / △x)
D=√(△x*△x + △y*△y)
其中,用计算器计算出的α称为象限角,之后还要根据△x、△y的正负号转换为坐标方位角。
四、数学坐标系与测量坐标系之间的关系
测量二维坐标系统有球面坐标或平面坐标:(1)大地坐标系;(2)高
斯平面直角坐标系;(3)独立平面直角坐标系。
1、无论是高斯平面直角坐标系还是独立平面直角坐标系均以纵轴为X轴,横轴为Y轴,这与数学上笛卡尔平面直角坐标系的X轴和Y轴正好相反。
2、测量坐标系与数学坐标系关于坐标象限的规定也有所不同,二者均以北东为第一象限,但数学上的四个象限是以逆时针递增,而测量上则为顺时针递增。
3、测量上的坐标方位角是以纵轴(X轴)顺时针至直线,而数学上的角度是以横轴(X轴)逆时针至直线。
由此可见,测量坐标系与数学坐标系其本质是相同的,所以只需把X 轴和Y轴纵横互换后,数学上的全部三角函数公式可直接应用,无需做任何改变。
程序示例:
直线方位角推算:
(以下程序是专业人士编写,本店铺不对程序负责,仅供您参考使用。) 卡西欧fx5800p计算器坐标正反算程序
一、程序功能 本程序由 6 个主程序、 5 个次子程序及 5 个参数子程序组成。主要用于公路测量中坐标正反算,设计任意点高程及横坡计算 , 桥涵放样,路基开挖口及填方坡脚线放样。程序坐标计算适应于任何线型 . 二、源程序 1. 主程序 1 :一般放样反算程序(① 正算坐标、放样点至置仪点方位角及距离;② 反算桩号及距中距离 ) 程序名 :1ZD-XY Lb1 0:Norm 2 F=1 : ( 正反算判别, F=1 正算, F=2 反算 , 也可以改 F 前加?,改 F 为变量 ) Z[1]=90 (与路线右边夹角) Prog " THB ": F=1=>Goto 1:F=2=>Goto 2 Lb1 1: F ix 3: "X = ": Locate 6,4, X◢ "Y=": Locate 6,4, Y◢ P rog "3JS”:Goto 0: Lb1 2:Fix 3: "KM=": Locate 6,4, Z◢ "D=": Locate 6,4, D◢ G oto 0 2.主程序2:高程序横坡程序 ( 设计任意点高程及横坡 ) 程序名: 2GC LbI 0:Norm 2 “KM”?Z:?D: Prog”H”:Fix 3:” H=”:Locate 6,4,H◢ “ I=”: Locate 6,4,I◢ Goto 0 3. 主程序 3 :极坐放样计算程序 ( 计算放样点至置仪点方位角及距离 ) 程序名: 3JS X : Y : 1268 .123→K( 置仪点 X 坐标 ) 2243 .545→L (置仪点 Y 坐标,都是手工输入 , 也可以建导线点数据库子程序 , 个人认为太麻烦) Y-L→E : X-K→F : Pol(F,E):IF J<0:Then J+360→J:Int(J)+0.01Int(60Frac(J))+0.006Frac(60Frac(J)) →J:( 不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢ 来直接显示) Fix 4:” FWJ=”: Locate 6,4,J◢( 不习惯小数点后四位为角度显示的,也可以用命令 J◢DMS◢ 来直接显示 ) Fix 3:” S=”:Locate 6,4,I◢ 4 .主程序 4 :涵洞放样程序(由涵中心桩号计算出各涵角坐标、在主程序 3 中输入置仪点坐标后计算放样点至置仪点方位角及距离 ) 程序名: 4JH-XY LbI 0:Norm 2 90→Z[1]( 涵洞中心桩与右边夹角,手工输入,也可以修改成前面加?后变为变量 )
一、 Lbl 3:"1→ZS,2→FS"?Q Q=1=>Goto 1:Q=2=>Goto 2 Lbl 1:"CE:X"?M:"CE:Y"?F:"JL"?L:"FWJ"?A:Rec(L,A):M+I→C:F+J→D Cls "X=":Locate 3,1,C:"Y=":Locate 3,2,D◢ Goto 3 Lbl 2::"CE:X"?G:"CE:Y"?H:"(HOU)FY:X"?N:"(HOU)FY:Y"?E Pol(N-G,E-H) If J<0:Then J+360→Y:Else J→Y:IfEnd Cls "FY JL=":Locate 10,1,I:"FY FWJ=":Y◆DMS◢ Goto 3 进入程序运行如下: 1→ZS,2→FS? 输入1为正算,2为反算. 以输入1为例: CE:X? 测站点X(5796.717) CE:Y? 测站点Y(5212.569) JL? 仪器测得的距离(321.889) FWJ? 仪器测得的方位角(193-41-07) 得到:X=5483.966 Y=5136.414 再按EXE,输2为例: CE:X? 测站点X(5796.717) CE:Y? 测站点Y(5212.569) (HOU)FY:X? 后视或放样的X(5483.966) (HOU)FY:Y? 后视或放样的Y(5136.414) 得到:FY JL=321.889 FY FWJ=193-41-6.79 二、 Deg : Fix 3 : “XZ→0:YZ→1”?A : If A = 1: Then Goto 1 : IfEnd ↙ If A = 0 : Then “BS→0:XY→1:AND→2:DK→3:L(I)→4 ”?O : IfEnd ↙ If O = 4: Then Goto 1 : IfEnd ↙ If O = 3: Then Prog “F.2 ”: If X= 0 : Then Goto 1 : IfEnd : IfEnd ↙ If O≠1: Then “X1 ”?X : “Y1”?Y : X→Z[11]: Y→Z[12]: “X2 ”?P : “Y2”?Q : Pol( P-X , Q-Y) : If J﹤0 : Then J + 360→J : IfEnd : Cls : “S12= ”: Locate 6 ,1, I : “B12= ”: J ?DMS◣
1.已知H A=358.236m, H B=63 2.410m,求h AB和h BA 2.设A点高程为101.352m,当后视读数为1.154m,前视读数为1.328m时,问高差是多少,待测点B的高程是多少?试绘图示意。 3.试计算水准测量记录成果,用高差法完成以下表格: 5.闭合水准路线计算。 6.水准测量成果整理
f h=50mm<f h容=±40=±89mm 7.完成表格并写出计算过程。 测 点距离(km)实测高差(m)改正数(m m)改正后高差(m)高程(m) BM0 1.50 3.326 -0.005 3.321 23.150 A 26.471 1.30 -1.763 -0.004 -1.767 B 24.704 0.85 -2.830 -0.003 -2.833 C 21.871 0.75 -0.132 -0.002 -0.134 D 21.737 1.80 1.419 -0.006 1.413 BM0 23.150 Σ 6.200.020-0.020 0 f h=20mm<f h容=±40=±99mm 8.一支水准路线AB。已知水准点A的高程为75.523m,往、返测站平均值为15站。往测高差为-1.234m,返测高差为+1.238m,试求B点的高程。 解:高差闭合差: 高差容许闭合:; 改正后高差: B点高程:9.完成表格并写出计算过程。 测 点距离(km)实测高差(m)改正数(m m)改正后高差(m)高程(m) BM7 130 0.533 -30.530 47.040 A 47.570 200 -0.166 -4-0.170 B 47.400 490 0.193 -100.183 C 47.583 370 0.234 -70.227 D 47.810 410 1.028 -8 1.020
工程测量计算题
四.计算题 (一)测量学基础知识(1-18题) 1.用钢尺丈量一条直线,往测丈量的长度为217.30m,返测为217.38m,今规定其相对误差不应大于1/2000,试问: (1)此测量成果是否满足精度要求?(2)按此规定,若丈量100m,往返丈量最大可允许相差多少毫米? 2.对某段距离往返丈量结果已记录在距离丈量记录表中,试完成该记录表的计算工作,并求出其丈量精度,见表1。 表1 测线整尺 段零尺段总 计 差 数 精 度 平均 值 AB 往50 5?18.964 返50 4?46.456 22.300
3.在对S 3 型微倾水准议进行i 角检校时,先将水准 仪安置在A 和B 两立尺点中间,使气泡严格居中,分别读得两尺 读数为1 a =1.573m , b 1 =1.415m ,然后将仪器搬 到A 尺附近,使气泡居中,读得2 a =1.834m ,b 2 =1.696m ,问 (1)正确高差是多少?(2)水准管轴是否平行视准轴?(3)若不平行,应如何校正? 4.如图1所示,在水准点BM 1 至BM 2 间进行水 准测量,试在水准测量记录表中(见表2)。 进行记录与计算,并做计算校核(已知 m BM m BM 110.142,952.13821==)。 图1 表2:水准测量记录表
测点后视读 数(m) 前视读数 (m) 高差(m)高程 (m) +- 5.在水准点B a M和b BM之间进行水准测量,所测 得的各测段的高差和水准路线长如图2所示。已 知B a M的高程为5.612m,b BM的高程为5.400m。试将有关数据填在水准测量高差调整表中(见 表3),最后计算水准点1和2的高程。 图2 表3:水准测量高程调整
高斯投影坐标正反算 V B程序 文件编码(GHTU-UITID-GGBKT-POIU-WUUI-8968)
高斯投影坐标正反算 学院: 班级: 学号: 姓名: 课程名称: 指导老师:
实验目的: 1.了解高斯投影坐标正反算的基本思想; 2.学会编写高斯正反算程序,加深了解。 实验原理: 高斯投影正算公式中应满足的三个条件: 1. 中央子午线投影后为直线; 2. 中央子午线投影后长度不变; 3. 投影具有正形性质,即正形投影条件。 高斯投影反算公式中应满足的三个条件: 1. x坐标轴投影成中央子午线,是投影的对称轴; 2. x轴上的长度投影保持不变; 3. 正形投影条件,即高斯面上的角度投影到椭球面上后角度没有 变形,仍然相等。 操作工具: 计算机中的 代码: Dim a As Double, b As Double, x As Double, y As Double, y_#
Dim l_ As Double, b_ As Double, a0#, a2#, a4#, a6#, a8#, m2#, m4#, m6#, m8#, m0#, l0#, e#, e1# Dim deg1 As Double, min1 As Double, sec1 As Double, deg2 As Double, min2 As Double, sec2 As Double Private Sub Command1_Click() Dim x_ As Double, t#, eta#, N#, W#, k1#, k2#, ik1%, ik2%, dh% deg1 = Val min1 = Val sec1 = Val deg2 = Val min2 = Val sec2 = Val l_ = (deg1 * 3600 + min1 * 60 + sec1) / 206265 b_ = (deg2 * 3600 + min2 * 60 + sec2) / 206265 dh = Val k1 = ((l_ * 180 / + 3) / 6) k2 = (l_ * 180 / / 3) ik1 = Round(k1, 0) ik2 = Round(k2, 0) If dh = 6 Then l0 = 6 * ik1 - 3 Else
工程测量计算题汇总
————————————————————————————————作者:————————————————————————————————日期:
1.已知H A=358.236m, H B=63 2.410m,求h AB和h BA 分析:h AB指B点相对于A点高差,即B点比A点高多少(用减法),h BA亦然。 解:h AB=H B-H A=632.410-358.236=274.174m h BA=H A-H B=358.236-632.410=-274.174m 2.设A点高程为101.352m,当后视读数为1.154m,前视读数为1.328m时,问高差是多少,待测点B的高程是多少?试绘图示意。 分析:高差为后视读数减去前视读数,B点高程可用仪高法或高差法,高差已求,故用后者。 解:h AB=1.154-1.328=-0.174m H B=H A+h AB=101.352-0.174=101.178m 3.已知H A=417.502m,a=1.384m,前视B1,B2,B3各点的读数分别为:b1=1.468m,b2= 0.974m,b3=1.384m,试用仪高法计算出B1,B2,B3点高程。 分析:仪高法先求视线高程,再按分别减去各前视读数,求得高程。 解:i=H A+a=417.502+1.384=418.886m H B1=i-b1=418.886-1.468=417.418m H B2=i-b2=418.886-0.974=417.912m H B3=i-b3=418.886-1.384=417.502m 4.试计算水准测量记录成果,用高差法完成以下表格: 测后视读数(m)前视读数(m)高差(m)高程(m)备注 BMA 2.142 0.884 123.446 已知水准 点 TP1 0.928 1.258 124.330 -0.307 TP2 1.664 1.235 124.023 0.233 TP3 1.672 1.431 124.256 -0.402 B 2.074 12 3.854 总Σa=6.406Σb=5.998Σh=0.408H B -H A=0.408计Σa-Σb=0.408 5.闭合水准路线计算。 点名测站数实测高差(m)改正数(m) 改正后高差(m) 高程(m) BM A 12 -3.411 -0.012-3.423 23.126 1 19.703
1、绘图说明水准测量的基本原理,写出高差法与视线高法计 算未知点的高程,其中A为已知点、B为待测点。 2、经纬仪观测角度,在地面O点安置经纬仪,利用测回法观 测角度β,画图说明一个测回之观测步骤。 3、计算:已知地面两点A、B,其坐标为X A=386.28m, Y A=278.36m,X B=527.31m,Y B=431.68m,H A=138.25m,H B=139.75m,请完成如下几项内容。 1)求A、B两点连线的坐标方位角αAB(解析法) 2)根据AB两点高程及其坐标,求AB段平均坡度 4、根据所测数据完成四等水准测量表格(双面尺法)
5、按表计算:水平角观测记录计算(测回法) 6、根据闭合导线123451所得数据完成闭合导线坐标计算表
7、用钢尺丈量一条直线,往测丈量的长度为217.30m,返测为217.38m,今规定其相对误差不应大于1/2000,试问: (1)此测量成果是否满足精度要求?(2)按此规定,若丈量100m,往返丈量最大可允许相差多少毫米? 8、对某段距离往返丈量结果已记录在距离丈量记录表中,试完成该记录表的计算工作,并求出其丈量精度,见表1。 表1 9、在对S3型微倾水准议进行角检校时,先将水准仪安置在A和B两立尺点中间,使气泡严格居中,分别读得两尺 读数为=1.573m,b1=1.415m,然后将仪器搬到A尺附近,使气泡居中,读得=1.834m,b2=1.696m,问 (1)正确高差是多少?(2)水准管轴是否平行视准轴?(3)若不平行,应如何校正? 10、如图1所示,在水准点BM1至BM2间进行水准测量,试在水准测量记录表中(见表2)。 进行记录与计算,并做计算校核(已知)。
坐标反算 ST(主程序名) “A”?→ A:“B”?→ B:LbI 0:“C”?→ C:“D”?→ D:√((C-A)2+(D-B)2))→S:D-B→M:Mcos-1((C-A)÷S)÷Abs M→T:If T<0:Then T+360 →T:Goto 1:IfEnd :T →T:Goto 1:LbI 1: “T=”:T▲DMS ◢“S=”:S◢Goto 0 程序运行示例及说明 运行主程序“ST” 第一步:A? 742589.425(输入起点或测站点的“X”坐标). 第二步:B? 463404.387(输入起点或测站点的“Y”坐标). 第三步:C? 742669.0657 (输入放样点的“X”坐标) 第四步: D? 463435.9536 (输入放样点的“Y”坐标). 第五步:T= 21°37′17.49″(显示放样点的计算方位角). 第六步:S= 85.6685(显示放样点的计算边长). 第171页
坐标正算 XY(主程序名) “A”?→ A:“B”?→ B: “C”?→ C:“F”?→ F:ABCF:LbI 0:“H”?→ H:“S”?→ S: HS:“X=”:A+(H-F)cosC-SsinC→ X◢“Y=”: B+(H-F) sin C+ScosC→ Y◢Goto 0 程序运行示例及说明 运行主程序“XY” 第一步:A? 742589.425(输入起点或测站点的“X”坐标). 第二步:B? 463404.387(输入起点或测站点的“Y”坐标). 第三步:C? 21°37′17.49″(输入直线段的方位角或测站点至测点的边长方位角) 第四步: F? 0(输入直线段起点桩号或测站点的桩号F=0) 第五步:H? 85.6685 (输入直线段上待求点桩号或测站点至测点的边长长度). 第六步:S? 0 (输入直线段上待求点的边距【左“-”,右“+”】或为测站时S=0). 第七步:X=742669.0657 (显示计算坐标). 第八步:Y=463435.9536 (显示计算坐标).
坐标正反算公式
一、GPS数据处理相关术语 1、三维无约束平差 三维无约束平差是以基线解算所得到的三维静态基线向量为观测值,待定参数主要为GPS 网中点的坐标;同时,利用基线解算时随基线向量一同输出的基线向量的方差阵,形成平差的随机模型,最终形成平差完整的数学模型。随后对所形成的数学模型进行求解,根据平差结果来确定观测值中是否存在粗差,数学模型是否有需要改进的部分,若存在问题,则采用相应的方法进行处理并重新进行求解;若未发现问题,则输出最终结果,并进行后续的数据处理。 2、三维约束平差 三维约束平差是以基线解算所得到的三维静态基线向量为观测值,在平差过程中引入会使GPS 网的尺度、方向和位置发生变化的外部起算数据,从而实现GPS 网成果由基线解算时GPS 卫星星历所采用的参照系(WGS84 )到特定参照系的转换,得到在特定参照系下的经过用户约束条件约束的点三维空间坐标。 二、南方GPS数据处理软件的平差方式
三维约束平差是指在基线解算后,WGS84坐标系下的三维平差,在三维平差中是不需要当地平面直角坐标系下的已知点坐标,当需要用到WGS84经纬度或空间直角坐标的用户可加载已知点的WGS84空间坐标(如果只有经纬度时,可采用COORD4.1软件进行转换,本站免费提供)进行三维约束平差,即可得到与已知点相匹配的WGS84坐标。 一般情况下,在“已知点坐标录入”窗口中,我们都没有输入WGS8坐标,而只输入当地坐标系下的已知坐标,此时GPS处理软件会自动识取一个坐标点的WGS84坐标进行约束平差。如下图:
如果在某些控制测量中,需要得到精确的WGS84经纬度或空间坐标时,让系统自动识取显然是不行的,此时我们只要为参与平差的已知点的WGS84空间坐标输入后再进行三维平差即可 在这里,我们加入了两个已知点的WGS84空间坐标,三维平差后,列表中会显示两个"固定"字样的点,说明,在进行三维平差中,我们把这两个点做为起算点,进行平差别的未知点。
1. 已知 H A =358.236m , H B =632.410m ,求 h AB 和 h BA 分析:h A B 指 B 点相对于 A 点高差,即 B 点比 A 点高多少(用减法), h BA 亦然。 解:h A B =H B -H A =632.410-358.236=274.174m h B A =H A -H B =358.236-632.410=-274.174m 2. 设 A 点高程为 101.352m ,当后视读数为 1.154m ,前视读数为 1.328m 时,问高差 是多少,待测点 B 的高程是多少?试绘图示意。 分析:高差为后视读数减去前视读数,B 点高程可用仪高法或高差法,高差已求,故用后 者。 解:h A B =1.154-1.328=-0.174m H B =H A +h AB =101.352-0.174=101.178m 3. 已知 H A =417.502m ,a=1.384m ,前视 B 1 ,B 2 ,B 3 各点的读数分别为:b 1 =1.468m ,b 2 =0.974m ,b 3 =1.384m ,试用仪高法计算出 B 1 ,B 2 ,B 3 点高程。 分析:仪高法先求视线高程,再按分别减去各前视读数,求得高程。 解:i=H A +a=417.502+1.384=418.886m H B 1 =i-b 1 =418.886-1.468=417.418m H B 2 =i-b 2 =418.886-0.974=417.912m H B 3 =i-b 3 =418.886-1.384=417.502m 算 校 5.核 闭合水准路线计算。
公路边线桩点的坐标计算及放样方法 中建四局一公司 (贵阳市云岩区松柏巷1号550003) 【摘要】本文主要讨论了在高等级公路施工放样过程中,公路边桩的坐标计算和放样方法。一、引言 公路施工放样测量是按照设计和施工要求将图纸上的路线设计方案放样到实地上去的一项工作,对新建的高等级公路而言,各方面的质量要求都很高,为确保路基在施工过程中路基宽度、坡比符合设计要求,笔者在此主要探讨了利用全站仪对公路边桩放样时的坐标计算方法 二、曲线上任一点的中桩坐标的计算 以直缓(TS)或缓直(ST)点为原点,以直缓点(或缓直点)的缓和曲线的切线为X轴,过直缓点(或缓直点)且垂直于X轴为Y轴,建立切线直角坐标系如图1,用切线支距法计算出曲线上每一点切线坐标。 1、曲线上任一点的中桩坐标的计算: 1.1、缓和曲线上任一点i的切线坐标计算: xi=l i - l5i/(40R2l02) 参考文献(1) yi=l3i/(6Rl0) 式中:x i、y i:缓和曲线上任一点的切线坐标。 l i :缓和曲线上任一点到直缓点(或缓直点)的距离。 l0:缓和曲线长度。 R:圆曲线半径。
1.2、带有缓和曲线的圆曲线上任一点的坐标计算 x i=Rsin αi +m y i =R(1-cos αi )+P 式中:xi、y i : 带有缓和曲的圆曲线上任一点的坐标。 m :增加缓和曲线后,切线增值长度。 m= l 0/2 - l 02/(240R2) p :增加缓和曲线后,圆曲线相对切线的内移量 p=l02/(24R) αi: i 点至缓和曲线起点弧长所对应的圆心角 αi =l i/R?180°/π+β0 式中:li :圆曲线上任一点到圆曲线起点的长度。 β0:缓和曲线角度。 β0= l 0/(2R)? 180°/π l o : 缓和曲线长度 1.3、利用坐标系变换,将切线直角坐标系变换为测量坐标系: 图1 1)、第一段缓和曲线上的点,即从TS 点SC 点之间: 参考文献(1)
第五篇坐标正反算通用程序(终极篇) 1. 坐标正算主程序(命名为ZBZS) 第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B 第2行:Prog “A” 第3行:”X=”:N+Zcos(F+B)◢ 第4行:”Y=”:E+Zsin(F+B)◢ 第5行:”F=”:F?DMS◢ 第6行:Goto 0 K——计算点的里程 BIAN——计算点到中桩的距离(左负右正) α——取前右夹角为正 2. 坐标反算桩号和偏距主程序(命名为ZBFS) 第1行:”X1=”? C:”Y1=”?D: ”K1=”?K 第2行:Lbl 0:Prog “A” 第3行:Pol(C-N,D-E):Icos(F-J)→S:K+S→K 第4行:Abs(S)>0.0001=>Goto 0 第5行:”K1=”:K◢ 第6行:”BIAN=”:Isin(J-F)→Z◢ X1——取样点的X坐标 Y1——取样点的Y坐标 K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号 Z——偏距(左负右正) 注:在9860或9960中需将第3行替换为Pol(C-N,D-E): List Ans[1]→I :List Ans[2]→J:Icos(J-F)→S:K+S→K,正反算主程序所有输入赋值多加一赋值符号(→),其他所有除数据库外的程序均保持不变 3. 计算坐标子程序(命名为XYF) 为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序 第1行:K-A→S:(Q-P)÷L→I 第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N 第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E 第4行:F+S(2P+S I)×90÷π→F 第5行:F<0=>F+360→F: F>360=>F-360→F 4. 数据库(命名为A) 第1行:K≤175.191=>Stop(超出后显示Done) 第2行:175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/240→Q:70.417→L: K≤A+L =>GoTo 1(第一缓和曲线) 第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q: 72.915→L: K≤A+L =>Goto 1(圆曲线)
坐标正反算定义及公式 Corporation standardization office #QS8QHH-HHGX8Q8-GNHHJ8
第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标?
35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角 、水平距离。
=62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、 =1771.03、=1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51", =200.40,试计算纵坐标增量横坐标增量。
5800-9860计算器坐标正反算通用程序 1. 坐标正算主程序(命名为ZBZS) 第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B 第2行:Prog “A” 第3行:”X=”:N+Zcos(F+B)◢ 第4行:”Y=”:E+Zsin(F+B)◢ 第5行:”F=”:F◢ 第6行:Goto 0 K——计算点的里程 BIAN——计算点到中桩的距离(左负右正) α——取前右夹角为正 2. 坐标反算桩号和偏距主程序(命名为ZBFS) 第1行:”X1=”? C:”Y1=”?D: ”K1=”?K 第2行:Lbl 0:Prog “A” 第3行:Pol(C-N,D-E) 第4行:List Ans[1]→I 第5行:List Ans[2]→J 第6行:Icos(F-J)→S:K+S→K 第7行:Abs(S)>0.0001=>Goto 0 第8行:”K1=”:K◢ 第9行:”BIAN=”:Isin(J-F)→Z◢ X1——取样点的X坐标 Y1——取样点的Y坐标 K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号 Z——偏距(左负右正) 3. 计算坐标子程序(命名为XYF) 为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I 第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N 第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E 第4行:F+S(2P+SI)×90÷π→F 4. 数据库(命名为A)
第1行:K≤175.191=>Stop 第2行: 175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/240→Q:70.417→L: K≤A+L =>GoTo 1(第一缓和曲线,圆半径为240) 第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q: 72.915→L: K≤A+L =>Goto 1(第圆曲线,半径为240) 第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104 →L: K≤A+L =>Goto 1(第二缓和曲线,圆半径为240) 第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:- 1/180→Q:67.222→L: K≤A+L=>Goto 1:Stop(第一缓和曲线,圆半径为180) 第6行:Lbl 1:Prog “XYF” A——曲线段起点的里程 N——曲线段起点的x坐标 E——曲线段起点的y坐标 F——曲线段起点的坐标方位角 P——曲线段起点的曲率(左负右正) Q——曲线段终点的曲率(左负右正) L——曲线段长度(尽量使用长度,为计算断链方便) 说明: (1)在9860中,程序中所有公式和部分函数结果均存储在List Ans列表数组中,要想多次调用最好随公式取出结果,并赋给变量。 (2)正算主程序可以计算一般边桩的坐标,如要计算类似涵洞端墙的坐标需增加第二偏距和转角两个变量。 (3)程序规定,左偏曲线曲率(半径倒数)输入负值,右偏曲线曲率输入正值,直线上点曲率输入0,例如直线段,线元起点和终点均输入0,第一缓和曲线分别输入0和圆半径的倒数,圆曲线均输入半径倒数,第二缓和曲线分别输入圆半径倒数和0,卵形曲线分别输 入对应圆半径的倒数 (4)若是从大里程向小里程的反方向计算,则曲率取正方向时的负值,方位角减去(或加上)180度。 (5)有多个匝道的项目,可随时更改正反算主程序中的红色字体部分来调用其它线路的数据 (6)反算桩号偏差为1mm (7)可以计算任意线型的任意点坐标
工程测量计算公式总 结
工程量计算 土建工程工程量计算规则公式汇总 平整场地: 建筑物场地厚度在±30cm以内的挖、填、运、找平. 1、平整场地计算规则 (1)清单规则:按设计图示尺寸以建筑物首层面积计算。 (2)定额规则:按设计图示尺寸以建筑物首层面积计算。 2、平整场地计算方法 (1)清单规则的平整场地面积:清单规则的平整场地面积=首层建筑面积 (2)定额规则的平整场地面积:定额规则的平整场地面积=首层建筑面积 3、注意事项 (1)、有的地区定额规则的平整场地面积:按外墙外皮线外放2米计算。计算时按外墙外边线外放2米的图形分块计算,然后与底层建筑面积合并计算;或者按“外放2米的中心线×2=外放2米面积” 与底层建筑面积合并计算。这样的话计算时会出现如下难点: ①、划分块比较麻烦,弧线部分不好处理,容易出现误差。 ②、2米的中心线计算起来较麻烦,不好计算。 ③、外放2米后可能出现重叠部分,到底应该扣除多少不好计算。 (2)、清单环境下投标人报价时候可能需要根据现场的实际情况计算平整场地的工程量,每边外放的长度不一样。 大开挖土方 1、开挖土方计算规则
(1)、清单规则:挖基础土方按设计图示尺寸以基础垫层底面积乘挖土深度计算。 (2)、定额规则:人工或机械挖土方的体积应按槽底面积乘以挖土深度计算。槽底面积应以槽底的长乘以槽底的宽,槽底长和宽是指混凝土垫层外边线加工作面,如有排水沟者应算至排水沟外边线。排水沟的体积应纳入总土方量内。当需要放坡时,应将放坡的土方量合并于总土方量中。 2、开挖土方计算方法 (1)、清单规则: ①、计算挖土方底面积: 方法一、利用底层的建筑面积+外墙外皮到垫层外皮的面积。外墙外边线到垫层外边线的面积计算(按外墙外边线外放图形分块计算或者按“外放图形的中心线×外放长度”计算。) 方法二、分块计算垫层外边线的面积(同分块计算建筑面积)。 ②、计算挖土方的体积:土方体积=挖土方的底面积*挖土深度。 (2)、定额规则: ①、利用棱台体积公式计算挖土方的上下底面积。 V=1/6×H×(S上+ 4×S中+ S下)计算土方体积(其中,S上为上底面积,S中为中截面面积,S下为下底面面积)。如下图 S下=底层的建筑面积+外墙外皮到挖土底边线的面积(包括工作面、排水沟、放坡等)。 用同样的方法计算S中和S下 3、挖土方计算的难点 ⑴、计算挖土方上中下底面积时候需要计算“各自边线到外墙外边线图”部分的
1. 已知H A=358.236m , H B=63 2.410m,求h AB和h BA 2. 设A点高程为101.352m,当后视读数为1.154m,前视读数为1.328m时,问高差是多少, 待测点B的高程是多少?试绘图示意。 3. 试计算水准测量记录成果,用高差法完成以下表格:
8. 一支水准路线 AB 已知水准点 A 的高程为75.523m ,往、返测站平均值为 15站 差为-1.234m ,返测 高差为+1.238m ,试求B 点的高程。 久=饥+如=-1 234 +1.238 = 0.004m 高差容许闭合:乜― B 点高程::;; 9. 完成表格并写岀计算过程。 测 占 八、、 距离(km 实测高差(m 改正数(mm ) 改正后高差(m 高程(m BM 130 0.533 -3 0.530 47.040 A 47.570 200 -0.166 -4 -0.170 B 47.400 490 0.193 -10 0.183 f h =50mmc f h 容=± 40 =± 89mm 测 占 八、、 距离(km ) 实测高差(m 改正数(mm ) 改正后高差(m 高程(m BM 1.50 3.326 -0.005 3.321 23.150 A 26.471 1.30 -1.763 -0.004 -1.767 B 24.704 0.85 -2.830 -0.003 -2.833 C 21.871 0.75 -0.132 -0.002 -0.134 D 21.737 1.80 1.419 -0.006 1.413 BM 23.150 6.20 0.020 -0.020 7. 完成表格并写出计算过程。 f h =20mr x f h 容=± 40 =± 99mm 解:高差闭合差: 往测高 改正后高差: =-1,236m 1 234 4-1.238
习题与思考题 1.名词解释:大地水准面、大地体、参考椭球面、横坐标通用值、绝对高程、相对高程、高差、磁偏角、坐标方位角、直线定向、方位角、。 2.测量学研究的对象和任务是什么工程测量的任务是什么 3.大地水准面有何特点大地水准面与高程基准面、大地体与参考椭球体有什么不同4.测量中的平面直角坐标系与数学平面直角坐标系有何不同 5.确定地面点位的三项基本测量工作是什么确定地面点位的三要素是什么 6.试简述地面点位确定的程序和原则。 7.在什么情况下,可将水准面看作平面为什么 8.地面点的经度为东经114°10′,试计算该点所在6°带和3°带的带号与中央子午线的经度为多少 9.已知某点所在的经度为118°14′,试问该点分别位于6°带和3°带中的第几带并且判断位于中央子午线的东侧还是西侧 10.知某地面点A 位于6°带内,其横坐标通用值为y A=20280000.00m,该点的自然值是多少A 点位于6°带的第几带A点位于中央子午线以东还是以西距中央子午线有多远 11.地面上有A、B两点,相距0.8km,问地球曲率对高程的影响为对距离影响的多少倍 12. 13.边长D MN=73.469m,方位角αMN=l15°18′12″,则ΔX MN与ΔY MN分别为( )。 A.十,十B.十, C.一,十D.- ,十 14.已αAB知X A=,Y A=;X B==;X C=,Y C=。试求αAB、αCD、αBC、αCB、D AB的大小。 习题&思考题 1.名词解释:水平角,竖直角,天顶距,竖盘指标差,对中,水平度盘配置,测回法。2.在同一竖直面内瞄准不同高度的点在水平度盘和竖直度盘上的读数是否相同为什么3.经纬仪的制动和微动螺旋各有什么作用怎样使用微动螺旋 4.观测水平角时,对中和整平的目的是什么简述经纬仪整平和光学对点器对中的方法。5.对于DJ6型光学经纬仪,如何利用分微尺进行读数 6.DJ2 型经纬仪如何进行读数观测水平角时,如何进行水平度盘归零设置和指定值配置7. 转动测微轮时,望远镜中目标影像是否随度盘影像的移动而移动为什么 8.竖盘指标水准管起什么作用自动归零仪器为什么没有指标水准管 9.观测水平角和竖直角有哪些相同点和不同点 10.怎样确定竖直角的计算公式 11.角度测量时通常用盘左和盘右两个位置进行观测,再取平均值作为结果,为什么12.经纬仪有哪些几何轴线其意义如何它们之间的正确关系是什么 13.对经纬仪进行CC⊥HH和HH⊥VV为什么有目标高度的要求经纬仪各项检验是 否有顺序要求为什么 14.由下表列出的水平角观测成果,计算其角度值。
高斯投影坐标正反算 学院: 班级: 学号: 姓名: 课程名称: 指导老师:
实验目的: 1.了解高斯投影坐标正反算的基本思想; 2.学会编写高斯正反算程序,加深了解。 实验原理: 高斯投影正算公式中应满足的三个条件: 1. 中央子午线投影后为直线; 2. 中央子午线投影后长度不变; 3. 投影具有正形性质,即正形投影条件。 高斯投影反算公式中应满足的三个条件: 1. x坐标轴投影成中央子午线,是投影的对称轴; 2. x轴上的长度投影保持不变; 3. 正形投影条件,即高斯面上的角度投影到椭球面上后角度没 有变形,仍然相等。 操作工具: 计算机中的VB6.0 代码: Dim a As Double, b As Double, x As Double, y As Double, y_# Dim l_ As Double, b_ As Double, a0#, a2#, a4#, a6#, a8#, m2#,
m4#, m6#, m8#, m0#, l0#, e#, e1# Dim deg1 As Double, min1 As Double, sec1 As Double, deg2 As Double, min2 As Double, sec2 As Double Private Sub Command1_Click() Dim x_ As Double, t#, eta#, N#, W#, k1#, k2#, ik1%, ik2%, dh% deg1 = Val(Text1.Text) min1 = Val(Text2.Text) sec1 = Val(Text3.Text) deg2 = Val(Text4.Text) min2 = Val(Text5.Text) sec2 = Val(Text6.Text) l_ = (deg1 * 3600 + min1 * 60 + sec1) / 206265 b_ = (deg2 * 3600 + min2 * 60 + sec2) / 206265 dh = Val(Text9.Text) k1 = ((l_ * 180 / 3.14159 + 3) / 6) k2 = (l_ * 180 / 3.14159 / 3) ik1 = Round(k1, 0) ik2 = Round(k2, 0) If dh = 6 Then l0 = 6 * ik1 - 3 Else If dh = 3 Then
坐标正反算公式 欧阳光明(2021.03.07) 一、GPS数据处理相关术语 1、三维无约束平差 三维无约束平差是以基线解算所得到的三维静态基线向量为观测值,待定参数主要为 GPS 网中点的坐标;同时,利用基线解算时随基线向量一同输出的基线向量的方差阵,形成平差的随机模型,最终形成平差完整的数学模型。随后对所形成的数学模型进行求解,根据平差结果来确定观测值中是否存在粗差,数学模型是否有需要改进的部分,若存在问题,则采用相应的方法进行处理并重新进行求解;若未发现问题,则输出最终结果,并进行后续的数据处理。 2、三维约束平差 三维约束平差是以基线解算所得到的三维静态基线向量为观测值,在平差过程中引入会使 GPS 网的尺度、方向和位置发生变化的外部起算数据,从而实现 GPS 网成果由基线解算时 GPS 卫星星历所采用的参照系( WGS84 )到特定参照系的转换,得到在特定参照系下的经过用户约束条件约束的点三维空间坐标。二、南方GPS数据处理软件的平差方式
三维约束平差是指在基线解算后,WGS84坐标系下的三维平差,在三维平差中是不需要当地平面直角坐标系下的已知点坐标,当需要用到WGS84经纬度或空间直角坐标的用户可加载已知点的WGS84空间坐标(如果只有经纬度时,可采用 COORD4.1软件进行转换,本站免费提供)进行三维约束平差,即可得到与已知点相匹配的WGS84坐标。 一般情况下,在“已知点坐标录入”窗口中,我们都没有输入WGS8坐标,而只输入当地坐标系下的已知坐标,此时GPS处理软件会自动识取一个坐标点的WGS84坐标进行约束平差。如下图: 如果在某些控制测量中,需要得到精确的WGS84经纬度或空间坐标时,让系统自动识取显然是不行的,此时我们只要为参与平差的已知点的WGS84空间坐标输入后再进行三维平差即可 在这里,我们加入了两个已知点的WGS84空间坐标,三维平差后,列表中会显示两个"固定"字样的点,说明,在进行三维平差中,我们把这两个点做为起算点,进行平差别的未知点。