选择晶振时要考虑哪些参数? 2011-7-19 14:26 提问者:rinkeigun|浏览次数:2555次 谢谢好心人。我想知道的是: 1. 晶振之身的参数(频率等) 2. 与周围的器件(51单片机)有什么关联,影响 3. 构成晶振的元件是什么(如C,Y) 4.哪里有最简单的电路图 我来帮他解答 2011-7-25 14:05 满意回答 1、 晶体谐振器的等效电路 图1是一个在谐振频率附近有与晶体谐振器具有相同阻抗特性的简化电路。 其中:C1为动态电容也称等效串联电容;L1为动态电感也称等效串联电感; R1为动态电阻也称等效串联电阻;C0为静态电容也称等效并联电容。 这个等效电路中有两个最有用的零相位频率,其中一个是谐振频率(Fr),另一个是反谐振频率(Fa)。当晶体元件实际应用于振荡电路中时,它一般还会与一负载电容相联接,共同作用使晶体工作于Fr和Fa之间的某个频率,这个频率由振荡电路的相位和有效电抗确定,通过改变电路的电抗条件,就可以在有限的范围内调节晶体频率。 2、晶体的频率 晶体在应用的电路中,其电气特性表现较复杂,与其相关的频率指标也有多个,主要的是: a)标称频率(F0) 指晶体元件规范中所指定的频率,也即用户在电路设计和元件选购时所希望的理想工作频率。 b)谐振频率(Fr) 指在规定条件下,晶体元件电气阻抗为电阻性的两个频率中较低的一个频率。根据图1的等效电路,当不考虑C0的作用,Fr由C1和L1决定,近似等于所谓串联(支路)谐振频率(Fs)。 这一频率是晶体的自然谐振频率,它在高稳晶振的设计中,是作为使晶振稳定工作于标称频率、确定频率调整范围、设置频率微调装置等要求时的设计参数。c)负载谐振频率(FL) 指在规定条件下,晶体元件与一负载电容串联或并联,其组合阻抗呈现为电阻性时两个频率中的一个频率。在串联负载电容时,FL是两个频率中较低的那个频
嵌入式系统软件 杨剑锋 1. 嵌入式操作系统 嵌入式操作系统是个集合,而且是个无限集合 –监控程序?常规操作系统 (红外线?紫外线) –一维和多维 嵌入式操作系统常常有实时要求–早期:嵌入式操作系统= 实时操作系统 –近期: ?1)手持计算机和掌上计算机的出现; ?2)CPU速度的提高; ?3)常规操作系统增加实时进程调度的支持,如 POSIX.4 ?嵌入式操作系统<>实时操作系统 许多嵌入式操作系统的内核是微内核结构 许多嵌入式操作系统都不带磁盘 –根本不支持文件系统 –结构上为了设备驱动而支持文件系统,但不 支持文件系统的文件存储功能 许多嵌入式操作系统不采用存储管理技术,即不支持虚拟存储技术 许多嵌入式操作系统不划分“系统空间”和“用户空间” –操作系统的“内核”与外围应用程序之间不再 有物理的边界; –系统中所谓“进程”实际上全都是内核线程?静态连接、系统调用、进程调度/切换–对任何一个应用程序做细微的修改,都得重新生成整个系统,并且“下载”之; –系统调用的界面太庞大; –共享变量的访问,需要谨慎对待; –把通用操作系统上的应用移植过来需考虑“可重入”的问题;
不分系统空间和用户空间<>必须静态连接–如DOS、CP/M的INT21 不分系统空间和用户空间<>不能用页面映射技术 –但只用于不同进程之间,而非不同空间之间 即使采用了存储管理,基本上都不采用页面交换技术 重启动技术(watch dog) 2. RTOS 是否实时 –一方面是多大程度上充分发挥硬件潜力,即综合速度快慢的问题; –另一方面同时也是反映的速度在多大的程度上得到保证的问题 中断延迟(Interrupt Latency)–中断不可嵌套 –LINUX的Bottom Half –中断可嵌套:优先级中断 ?大多微处理器不支持; ?LINUX不支持; ?UNIX支持 –与指令集有关 –DMA操作有关 –保证系统调用的原子性有关 调度延迟(Scheduling Latency)–中断处理程序进程处理 –一般调度算法(Round Robin)不能及时选 中 –基于优先级调度算法,一般能及时选中?如果目标进程优先级低呢? –可剥夺调度和不可剥夺调度 ?LINUX是属于什么调度? ????????????→ 事件或软中断 Linux 既不是完全的可剥夺,也不是完全的不可剥夺 上下文切换延迟(Context Switch Latency)–大小取决于CPU和操作系统 –采用MMU > 不采用MMU 只要发生调度,就能选中目标进程吗? –根据时间片的耗用调整优先级 –拉开距离,分等级 对实时进程而言,“应该没有问题”不够。 是否可以不用中断、也不用调度,回到 最简单的“监控程序”?
晶振基础知识(第一版) 摘要:本文简单介绍了晶体谐振器和晶体振荡器的结构,工作原理,振荡器电路的分类,晶体振荡器的分类,晶振类器件的主要参数指标和石英晶体基本生产工艺流程。 一、振荡电路的定义,构成和工作原理 (2) 二. 晶体振荡器分类: (16) 三、石英晶体谐振器主要参数指标 (19) 四、石英晶体振荡器主要参数指标 (20) 五.石英晶体基本生产工艺流程 (26)
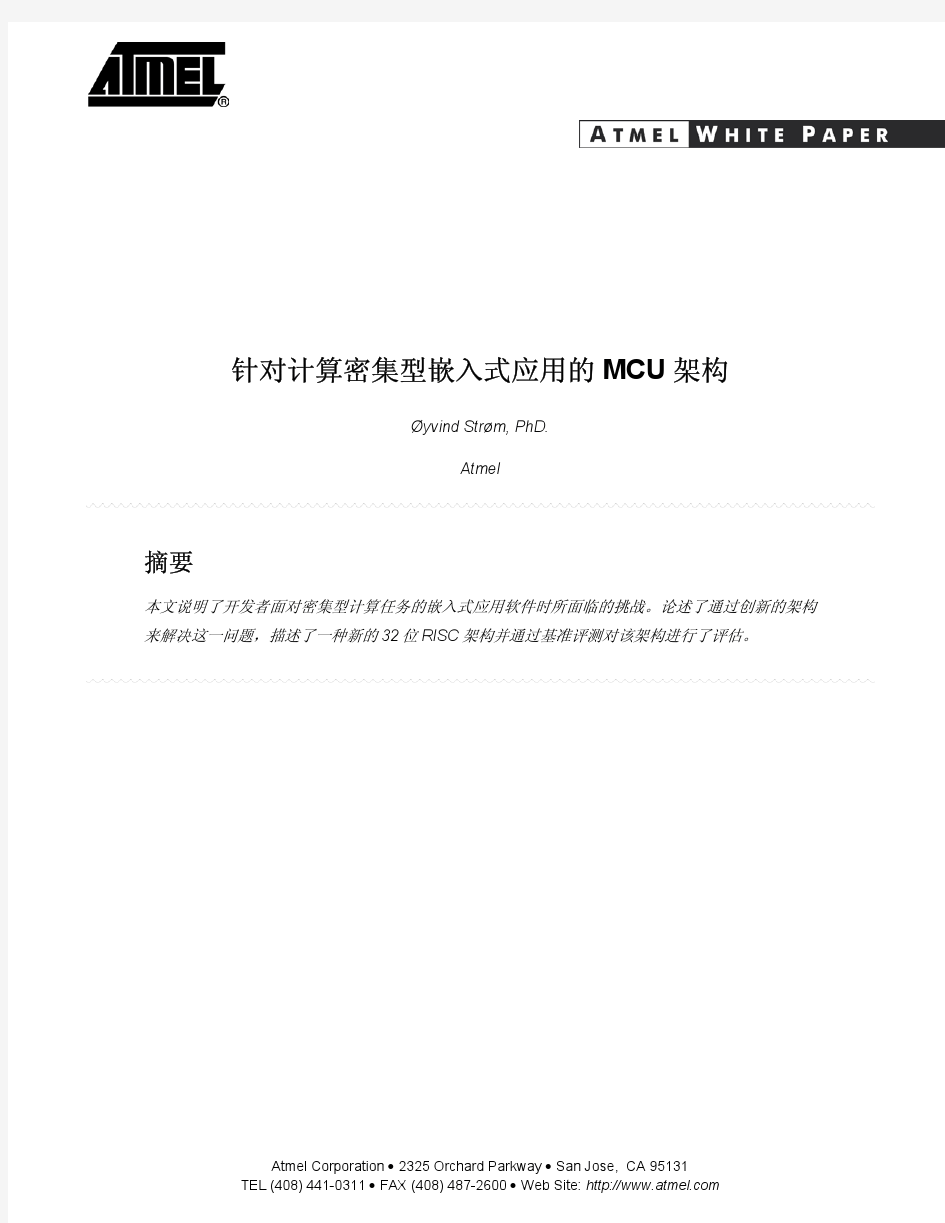
一、振荡电路的定义,构成和工作原理 1. 振荡器:不需外加输入信号,便能自行产生输出信号的电路,通常也被成为。 2. 振荡器构成:谐振器(选频或滤波)+驱动(谐振)电路构成振荡器电路。 3. 谐振器的种类有:RC 谐振器,LC 并联谐振器,陶瓷谐振器,石英(晶体)谐振器,原子谐振器,MEMS (硅)振荡器。本文只讨论石英晶体谐振器。 石英谐振器的结构 石英谐振器,它由石英晶片、电极、支架和外壳等部分组成。它的性能与晶片的切割方式、尺寸、电极的设置装架形式,以及加工工艺等有关。其中,晶片的切割问题是设计时首先要考虑的关键问题。由于石英晶体不是在任何方向都具有单一的振动模式(即单频性)和零温度系数,因此只有沿某些方向切下来的晶片才能满足设计要求。 Mounting clips Top view of cover Resonator
普通晶振内部结构 石英晶体振荡器主要由基座、晶片、IC 及外围电路、陶瓷基板(DIP OSC )、上盖组成。 普通晶体振荡器原理图 胶点 基座 晶片 Bonding 线 IC
4. 振荡电路的振荡条件: (1)振幅平衡条件是反馈电压幅值等于输入电压幅值。根据振幅平衡条件,可以确定振荡幅度的大小并研究振幅的稳定。 (2)相位平衡条件是反馈电压与输入电压同相,即正反馈。根据相位平衡条件可以确定振荡器的工作频率和频率的稳定。 (3)振荡幅度的稳定是由器件非线性保证的,所以振荡器是非线性电路。 (4)振荡频率的稳定是由相频特性斜率为负的网络来保证的。 (5)振荡器的组成必须包含有放大器和反馈网络,它们必须能够完成选频、稳频、稳幅的功能。(6)利用自偏置保证振荡器能自行起振,并使放大器由甲类工作状态转换成丙类工作状态。
1章绪论 1.国内嵌入式系统行业对“嵌入式系统”的定义是什么?如何理解?答:见教材1.1节。 2.嵌入式系统是从何时产生的,简述其发展历程。答:见教材1.1节。 3.当前最常见的源码开放的嵌入式操作系统有哪些,请举出两例,并分析其特点。 答:见教材1.2.1节的嵌入式Linux和嵌入式实时操作内核UC /OS-I 。 4.举例说明嵌入式设备在工控设备中的应用。答:见教材1.3节的“工业控制领域”。 5.未来嵌入式技术的发展趋势有哪些?答:见教材1.4节的嵌入式技术的发展趋势。 2章ARM技术与ARM体系结构 1.简述ARM处理器内核调试结构原理。答:对教材1.2节的图2-1进行描述。 2.分析ARM7TDMI-S各字母所代表的含义。答:参考教材 2.1.2 ARM核版本命名规则说明。3.ARM处理器的工作模式有哪几种,其中哪些为特权模式,哪些为异常模式,并指出处理器在什么情况下进入相应的模式。 ARM处理器共有7种工作模式: 用户模式:非特权模式,也就是正常程序执行的模式,大部分任务在这种模式下执行。在用户模式下,如果没异常发生,不允许应用程序自行改变处理器的工作模式,如果有异常发生,处理器会自动切换工作模式FIQ模式:也称为快速中断模式,支持高速数据传输和通道处理,当一个高优(fast)中断产生时将会进入这种模式。 IRQ模式:也称为普通中断模式,:当一个低优先级中断产生时将会进入这种模式。在这模式下按中断的处理器方式又分为向量中断和非向量中断两种。通常的中断处理都在IRQ 模式下进行。 SVC模式:称之为管理模式,它是一种操作系统保护模式。当复位或软中断指令执行时处理器将进入这种模式。 中止模式:当存取异常时将会进入这种模式,用来处理存储器故障、实现虚拟存储或存储保护。 未定义指令异常模式:当执行未定义指令时会进入这种模式,主要是用来处理未定义的指令陷阱,支持硬件协处理器的软件仿真,因为未定义指令多发生在对协处理器的操作上。 系统模式:使用和User模式相同寄存器组的特权模式,用来运行特权级的操作系统任务。 在这7种工作模式中,除了用户模式以外,其他6种处理器模式可以称为特权模式,在这些模式下,程序可以访问所有的系统资源,也可以任意地进行处理器模式的切换。在这6种特权模式中,除了系统模式外的其他5种特权模式又称为异常模式 4.分析程序状态寄存器(PSR)各位的功能描述,并说明C、Z、N、V在什么情况下进行置位和清零。PSR的具体格式为 V—溢出标志位 对于加/减法运算指令,当操作数和运算结果为二进制补码表示的带符号数时,V=1表示符号位溢出,其他的指令通常不影响V位。 例如:两个正数(最高位为0)相加,运算结果为一个负数(最高位为1),则符号位溢出,相应V=1。
1、晶体元件参数 1.1等效电路 作为一个电气元件,晶体是由一选定的晶片,连同在石英上形成电场能够导电的电极及防护壳罩和内部支架装置所组成。 晶体谐振器的等效电路图见图1。 等效电路由动态参数L 1、C 1、R 1和并电容C 0组成。这些参数之间都是有联系的,一个参数变化时可能会引起其他参数变化。而这些等效电路的参数值跟晶体的切型、振动模式、工作频率及制造商实施的具体设计方案关系极大。 下面的两个等式是工程上常用的近似式: 角频率ω=1/11C L 品质因数Q=ωL 1/R 1 其中 L1为等效动电感,单位mH C1为等效电容,也叫动态电容,单位fF R1为等效电阻,一般叫谐振电阻,单位Ω 图2、图3、图4给出了各种频率范围和各种切型实现参数L 1、C 1、R 1的范围。 图2常用切型晶体的电感范围 图3 常用切型的电容范围 对谐振电阻来说,供应商对同一型号的任何一批中可以有3:1的差别,批和批之间的差别可能会更大。对于一给定的频率,采用的晶体盒越小,则R 1和L 1的平均值可能越高。
1.2 晶体元件的频率, 晶体元件的频率通常与晶体盒 尺寸和振动模式有关。一般晶体尺 寸越小可获得的最低频率越高。晶 体盒的尺寸确定了所容纳的振子的 最大尺寸,在选择产品时应充分考 虑可实现的可能性,超出这个可能 范围,成本会急剧增加或成为不可 能,当频率接近晶体盒下限时,应与 供应商沟通。下表是不同晶体盒可 实现的频率范围。 图4 充有一个大气压力气体 (90%氮、10%氦) 的气密晶体元件的频率、切型和电阻范围 1.3 频差 规定工作温度范围及频率允许偏差。 电路设计人员可能只规定室温频差,但对于在整个工作温度范围内要求给定频差的应 用,除了给定室温下的频差还应给出整个工作温度范围内的频差。给定这个频差时,应充分 考虑设备引起温升的容限。 通常有两种方法规定整个工作温度范围的频差。 1)规定总频差 如从-10℃—+85℃,总频差为±50×10-6,通常这种方法一般用于具有较宽频差而不采
浅析C语言嵌入式系统编程软件设计架构 发表时间:2018-09-04T11:58:13.513Z 来源:《建筑学研究前沿》2018年第10期作者:田壮[导读] 一个方向是自顶向下,从抽象到具体,从最顶层的程序或者逻辑整体描述规范出发向下到具体的操作模块。 美的洗涤电器制造有限公司 528311 摘要:C语言是嵌入式软件开发使用最多的语言,主要是由于C语言兼具高低级语言的特性,简洁高效、灵活方便,支持对硬件的直接操作,但其灵活性也往往会带来复杂的代码管理和维护问题。基于此,本文就从C语言嵌入式系统编程软件设计展开分析。 关键词:C语言;嵌入式系统;编程软件设计 1、系统设计思路 1.1自顶向下与自底向上 一个方向是自顶向下,从抽象到具体,从最顶层的程序或者逻辑整体描述规范出发向下到具体的操作模块,这是目前嵌入式系统应用层开发常用的方法。在嵌入式系统设计过程中,可以将两种方法结合使用,针对硬件的操作采用自底向上,尽可能抽象出所有的元操作,应对不同上层应用的重用要求;在逻辑应用上,则采用自顶向下,对应用逻辑表达进行抽象规范,尽量使得模块划分便于开发实现、重用和维护。 1.2最优模块化 ①紧凑性,封装良好的模块决不互相暴露内部信息,也不去调用其他模块的操作实现,而是通过函数接口来相互通信; ②正交性,任何模块的功能点应当是唯一的、无歧义的,在系统中以确定无疑的方式存在。在纯正交的模块设计中,每一个操作行动只限于该项功能,系统的每一属性只有一条途径改变,不影响其他功能,这有助于将复杂的设计紧凑化。 2、嵌入式系统开发的分层架构 2.1分层原则 ①层次划分兼顾功能颗粒度和重用可能性,每层解决不同的问题,下层要能够为上层应用提供支撑,比如环境温度监测功能,可以从概念上划分为数据采集层、处理层、显示层等,层层递进实现; ②层与层之间的相关性尽量小,确保某一层的软件设计出现问题,只会影响到该层次的上下结构,不会影响到软件系统的整体; ③每层内部按照任务分解、功能优化、重用程度进行模块划分,尽量实现软件功能的高内聚、低耦合。理论上,功能分解得越简单,实现起来越容易,重复使用频次就会越高,但目标过度细化会使设计管理、功能调度的复杂度迅速上升,所以一般划分到概念上能够独立完成一项功能、与其他功能相关性合适的程度。 2.2分层设计方法 首先,采取自顶向下的方法对嵌入式系统应用需求进行梳理,抽象出不同的逻辑功能要求,明确概念层次,再转化成软件层次。 其次,采取自底向上的方法对涉及到的硬件功能进行抽象,应尽可能细化出应用开发需要的硬件操作原语。对于嵌入式系统而言,大量的开发工作是通过软件驱动底层硬件实现相应的专用功能,对硬件功能的封装既有利于降低当前系统开发的复杂度,又便于实现硬件的无关性,提高程序代码的复用性。 再次,采用自顶向下和自底向上相结合的方法,逐层检验相邻层次间的信息交互和调用关系,确保每一个上层的调用都能得到满足。 最后,对每一层的功能进行合并整合,优化功能模块设计,努力实现最优模块化。在实际系统开发中,最优模块化的过程也是对现有程序代码重用的优化选择过程。 2.3分层技术的应用 常见的功能模块划分是围绕中心处理器/控制器来设计系统逻辑架构,采用面向过程的设计思路,区分为输入/输出、应用调度、设备驱动、网络通信等功能模块。这样的划分方式能够充分利用系统的处理能力,进行精细化的存储空间管理,但也带来应用逻辑交叉重复、与硬件依赖关系强等缺点,很难进行功能拓展,代码重用性也较差。 ①应用管理层。主要实现界面交互、业务逻辑调度等功能。 ②算法协议层。主要实现模型算法、协议解析、文件管理、数据库管理等功能,如位置转换计算、罗盘指针方位计算等。 ③功能拓展层。主要实现器件的无关性,提供各种器件的通用性处理、接口访问等功能,如LCD的线、圆、矩形处理,传感器数据转换等功能。 ④硬件驱动层。主要实现硬件的无关性,提供硬件的操作原语功能,如LCD的定位、写点、写字节、传感器数据采集等功能。上述分层设计方案,将同类或相似技术实现的功能进行聚合,减少业务应用、模型算法和硬件操作之间的耦合性,避免功能在分析设计中的交叉混淆,整个应用程序的结构变得更加清晰和灵活,使得一个成熟的模型算法能够支持多个应用逻辑,一个成熟的软件功能模块能够适应不同的硬件环境,提高了软件功能模块的开发效率和可重用性。 3、基于C语言的系统软件设计 3.1代码管理 ①文件目录管理。按照分层原则组织文件目录,主程序文件、全局变量头文件放在根目录,其他文件按照应用管理层、算法协议层、功能拓展层、硬件驱动层分别存放在AppFunc、ModelFunc、HardExt、HardOpt文件夹,所有文件命名遵循统一的规范。如果有第三方的通用函数库,可以建立ComFunc文件夹来存放。这样在开发过程中,可以充分利用分层模型的优势,各层功能的开发人员可以在不同的文件夹内进行并行工作,实现工程化管理。 ②功能模块管理。为了实现模块化设计的高内聚性,应少用或不用全局变量,尽量通过函数参数来传递数据。同一类的业务应用功能、同一硬件的操作功能尽量放在同一文件内实现。上层功能模块的开发可以调用下层功能模块,下层功能模块尽量避免交叉调用或越级调用。
Crystal First Failure FL RR DLD2 RLD2 SPDB C0 C0/C1 C1 L ppm Ohms Ohms Ohms dB pF fF mH High Limit 20.0 80.0 8.0 80.0 -2.0 7.0 Low Limit -20.0 1.0 1 PASS 3.45 50.57 2.24 54.39 -4.66 3.8 3 3,744.8 4 1.0 2 10.75 2 PASS -5.84 32.05 4.18 36.30 -6.96 3.8 6 4,113.2 9 0.9 4 11.70 3 Fail DLD2 High 0.44 73.86 27.81 108.17 -3.59 3.7 4 3,613.2 7 1.0 3 10.63 4 Fail SPDB High -8.97 33.67 2.06 37.55 -0.44 3.9 2 5,538.0 1 0.7 1 15.54 5 PASS -1.27 40.11 1.65 42.75 -7.8 6 3.8 9 3,955.0 9 0.9 8 11.17 6 PASS -6.74 30.12 4.38 34.23 -9.58 3.8 1 3,608.8 5 1.0 6 10.42 7 PASS -3.52 41.97 1.52 42.86 -6.95 3.8 5 4,670.1 9 0.8 2 13.35 8 PASS 1.13 38.34 2.07 40.46 -4.15 3.8 8 5,017.9 5 0.7 7 14.23 9 PASS -7.01 21.31 0.73 21.80 -9.89 3.8 3 3,018.1 7 1.2 7 8.67 10 Fail DLD2 High -3.62 24.75 52.36 78.55 -10.3 3.8 6 2,943.3 9 1.3 1 8.37 晶振的等效电器模型 C0 ,是指以水晶为介质,由两个电极形成的电容。也称为石英谐振器的并联电容,它相当于以石英片为介质、以两电极为极板
嵌入式系统架构发展趋势及比较分析 范虎 嵌入式系统已经广泛地应用到当今各个领域,与我们的生活息息相关,小到掌上的数字产品,大到汽车、航天飞机。提到嵌入式系统我们很快会联想到单片机,不错,MCU是最基础和常用的嵌入式系统,但是目前像FPGA、ARM、DSP、MIPS 等其他嵌入式系统应用也越来越广泛。 总的来说,嵌入式系统发展呈现如下特点:·由8位处理向32位过渡·由单核向多核过渡·向网络化功能发展·MCU、FPGA、ARM、DSP等齐头并进·嵌入式操作系统呈多元化趋势,所有的嵌入式处理器都是基于一定的架构的,即IP 核(IntellectualProperty,知识产权),生产处理器的厂家很多,但拥有IP 核的屈指可数。嵌入式系统的架构有专有架构和标准架构之分,在MCU(微控制器)产品上,像瑞萨(Renesas)、飞思卡尔(Freescale)、NEC等都拥有自己的专有IP核,而其他嵌入式处理器都是基于标准架构。 标准的嵌入式系统架构有两大体系,目前占主要地位的是所谓RISC (ReducedInstructionSetComputer,精简指令集计算机)处理器。RISC体系的阵营非常广泛,从ARM、MIPS、PowerPC、ARC、Tensilica等等,都是属于RISC 处理器的范畴。不过这些处理器虽然同样是属于RISC体系,但是在指令集设计与处理单元的结构上都各有不同,因此彼此完全不能兼容,在特定平台上所开发的软件无法直接为另一硬件平台所用,而必须经过重新编译。 其次是CISC(ComplexInstructionSetComputer,复杂指令集计算机)处理器体系,我们所熟知的Intel的X86处理器就属于CISC体系,CISC体系其实是比较低效率的体系,但由于其已经被市场长久验证,稳定性高,故常被应用于效能需求不高,但稳定性要求高的应用中,如工控设备等产品。 下面将简单介绍一下几种比较常见的RISC和CISC嵌入式系统架构。 1、RISC家族之ARM处理器 ARM公司于1991年成立于英国剑桥,主要出售芯片设计技术的授权。目前,采用ARM技术(IP)核心的处理器,即我们通常所说的ARM处理器,已遍及工业控制、消费类电子产品、通信系统、网络系统、无线系统等各类产品市场,基于ARM技术的处理器应用约占据了32位RISC微处理器75%以上的市场。 目前市面上常见的ARM处理器架构,可分为ARM7、ARM9,ARM11以及Cortex 系列。ARM也是嵌入式处理器中首先推出多核心架构的厂商。ARM首个多核心架构为ARM11MPCore,架构于原先的ARM11处理器核心之上。ARM11采用当时最先进的0.13μm制造制程,运行频率最高可达500到700MHz。如果采用90nm制程,ARM11核心的工作频率能够轻松达到1GHz以上—对于嵌入式处理器来说,这显然是个相当惊人的程度。
本文由hquwgz贡献 ppt文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。 嵌入式系统及应用 第九章嵌入式系统软件的开发 主要内容 嵌入式软件开发工具嵌入式系统开发模式实时软件分析设计方法 第一节嵌入式软件开发工具 嵌入式软件开发工具的分类嵌入式软件的交叉开发环境嵌入式软件实现阶段的开发过程嵌入式软件开发工具的发展趋势 嵌入式软件开发工具 “工欲善其事,必先利其器”嵌入式软件开发工具的集成度和可用性将直接关系到嵌入式系统的开发效率。 嵌入式软件开发工具的分类 嵌入式软件开发阶段 嵌入式软件开发工具的分类 根据不同的阶段,嵌入式软件开发工具可以分为: 需求分析工具(Requirement Analysis Tools)软件设计工具(Software Design Tools) 编码、调试工具(Coding Tools) 测试工具(Testing Tools) 配置管理工具、维护工具等 Rational Rose RealTime ObjectGeode Rhapsody TAU Tornado LambdaTOOL pRISM+ Spectra Win CE Platform Builder CodeWarrior Xray Debugger Logiscope CodeTEST Phases Requirement Analysis Software Design Coding Test Release 主要嵌入式软件开发工具产品 嵌入式软件开发工具的分类 嵌入式软件的开发可以分为以下几种: 编写简单的板级测试软件,主要是辅助硬件的调试开发基本的驱动程序开发特定嵌入式操作系统的驱动程序(板级支持包)开发嵌入式系统软件,如:嵌入式操作系统等开发应用软件 嵌入式软件开发工具的分类 从以上嵌入式软件开发分类来看,嵌入式软件开发工具可以分为: 与嵌入式OS相关的开发工具,用于开发: 基于嵌入式OS的应用部分驱动程序等 与嵌入式OS无关的开发工具,用于开发: 基本的驱动程序辅助硬件调试程序系统软件等 嵌入式软件的交叉开发环境 交叉开发环境是指用于嵌入式软件开发的所有工具软件的集合,一般包括: 文本编辑器交叉编译器交叉调试器仿真器下载器等 交叉开发环境由宿主机和目标机组成,宿主机与目标机之间在物理连接的基础上建立起逻辑连接。 运行平台Target 目标机应用系统调试代理 开发平台Host 宿主机开发环境运行库 —应用软件—应用中间件—目标机OS 目标机硬件 ————
如何正确的设计嵌入式软件架构应该这么做 一 错误的示范 近公司新招了一个做嵌入式软件开发的同事,该同事是从上海的某一个上市公司出来的,因为我们这边人手不够,因此把他安排了去负责一个新产品的研发,前期让他负责加速度计、NB-IOT、舵机、外置Flash的功能测试,测试完成之后,准备让他做一个该产品的概要设计。然后他花了2个星期的时间,给我们写出来一个概要设计,说实话,我看到这个概要设计,我就觉得是刚毕业的大学生写的。版本一的架构设计 2.1系统体系结构系统分为两层:硬件驱动层、应用层。2.1.1硬件驱动层硬件驱动层包含板载硬件资源正常运行所需的所有驱动程序。1)MCU初始化2)I2C数据存取3)SPI数据读取4)加速度计初始化5)蓝牙模块启动6)BC95模块启动7)485通讯模块启动2.2.2应用层1)Mcu运行模式切换2)震动及倾斜3)数据解析4)开/关锁5)数据发送6)历史数据保存 看到版本一的架构设计之后,说实话,我还是第一次见到这样来写架构设计的,居然是以序号来写的,这个让别人读起来,特别的别扭。版本二的架构设计 看到版本二的架构设计之后,虽然颇感欣慰,但是想到达到我们所要求的,还要很大的一段距离,该架构设计,主要有以下几点问题:1.对架构的理解还不是很清晰,既然是做架构设计,那就应该从整体来看,而不是仅仅只是局限于一个模块,或者功能里面。2.还是每个层次的理解也还不是很清晰,比如讲MCU的初始化,归于硬件驱动层里面。MCU 的初始化,严格意义上来说,是属于流程的一部分了,而不是驱动。比如电脑的开启启动,把这个归于硬件的驱动里面,肯定是属于牛头不对马嘴的。3.还有就是各个模块的启动,也是不能属于硬件驱动层的,也都是业务流程的一部分了,都不应该属于驱动层的一部分。 4.还有就是总线数据的读写,虽然驱动的作用也就是读写,但是数据总线的读写不能写成硬件驱动。 5.应用层的系统参数初始化,也还是属于流程。 6.数据的解析和数据的发生,都是属于通信功能里面的,不应该单独独立出来,属于单个的应用。
晶振基础知识
晶振基础知识(第一版) 摘要:本文简单介绍了晶体谐振器和晶体振荡器的结构,工作原理,振荡器电路的分类,晶体振荡器的分类,晶振类器件的主要参数指标和石英晶体基本生产工艺流程。 一、振荡电路的定义,构成和工作原理 (3) 二. 晶体振荡器分类: (23) 三、石英晶体谐振器主要参数指标 (27) 四、石英晶体振荡器主要参数指标 (30) 五.石英晶体基本生产工艺流程 (43)
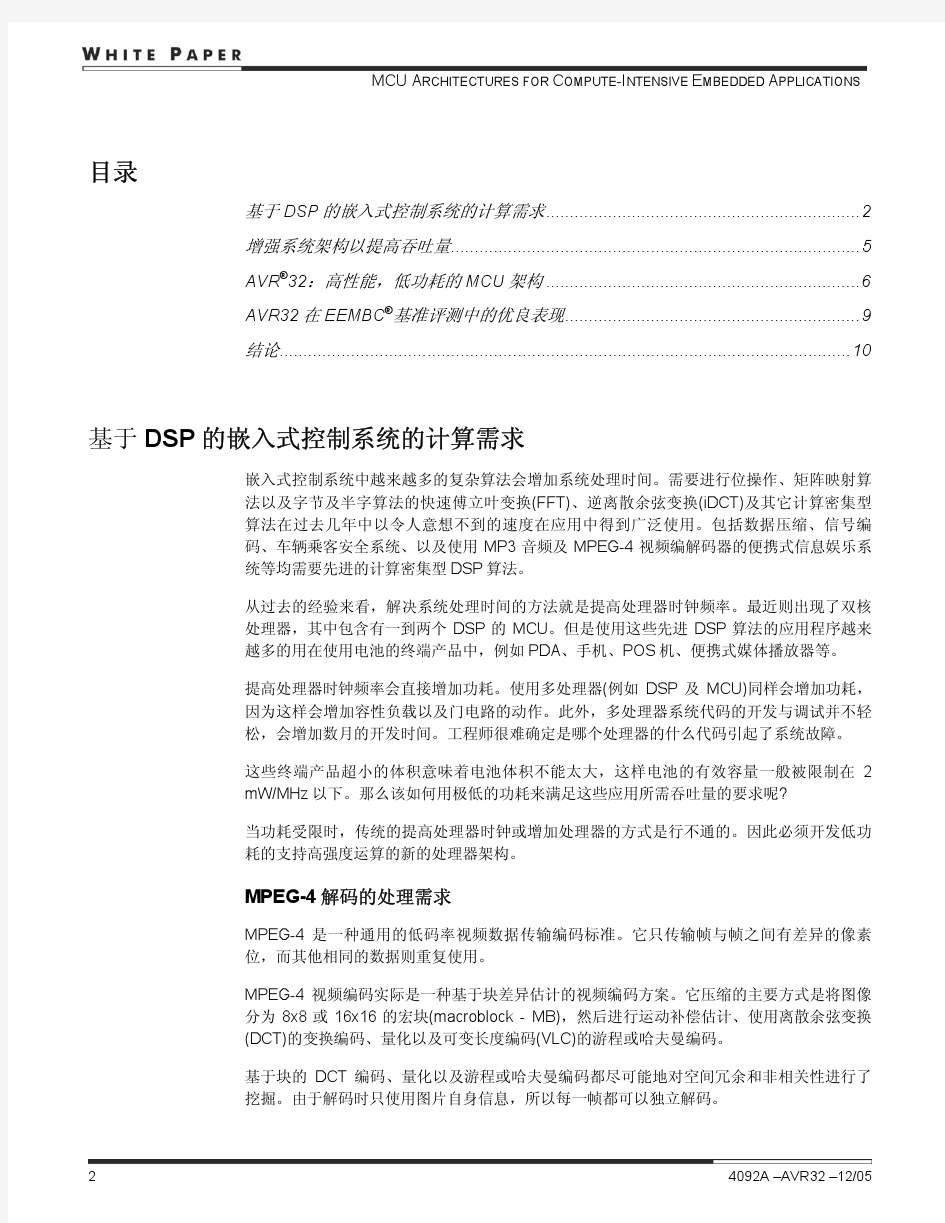
一、振荡电路的定义,构成和工作原理 1. 振荡器:不需外加输入信号,便能自行产生输出信号的电路,通常也被成为。 2. 振荡器构成:谐振器(选频或滤波)+驱动(谐振)电路构成振荡器电路。 3. 谐振器的种类有:RC谐振器,LC并联谐振器,陶瓷谐振器,石英(晶体)谐振器,原子谐振器,MEMS(硅)振荡器。本文只讨论石英晶体谐振器。石英谐振器的结构 石英谐振器,它由石英晶片、电极、支架和外壳等部分组成。它的性能与晶片的切割方式、尺寸、电极的设置装架形式,以及加工工艺等有关。其中,晶片的切割问题是设计时首先要考虑的关键问题。由于石英晶体不是在任何方向都具有单一的振动模式(即单频性)和零温度系数,因此只有沿某些方向切下来的晶片才能满足设计要求。
普通晶振内部结构 Base Mounting clips Bonding area Electrodes Quartz blank Cover Seal Pins Top view of cover Metallic electrodes Resonator plate substrate (the “blank”)
《嵌入式系统》课程设计 题目有操作系统的嵌入式系统软件开发学院(部) 电子信息工程学院 专业 学生姓名 学号年级 指导教师职称 2011 年 6 月
目录 第1章课程设计的任务说明 (2) 1.1 课程设计的目的 (2) 1.2 课程设计的要求 (2) 2.1 有操作系统的软件开发流程 (3) 2.1.1嵌入式系统开发概述 (3) 2.1.2嵌入式软件开发概述 (4) 2.2 有操作系统的软件运行模式 (6) 第3章 Linux操作系统简介 (9) 第4章 uC linux操作系统简介 (10) 第5章开发环境的建立 (11) 5.1 建立主机Linux平台 (11) 5.1.1 虚拟机VMware软件的安装 (11) 5.1.2 安装red hat (14) 5.1.3 安装vMware tool (19) 5.1.4 安装共享目录 (20) 5.1.5 安装交叉编译 (20) 第6章 uC Linux裁剪与编译 (21) 第7章操作系统下多任务应用程序开发 (25) 总结 (27) 参考文献 (28)
第1章课程设计的任务说明 1.1 课程设计的目的 (1)了解有操作系统的嵌入式系统软件开发流程; (2)了解Linux操作系统的基本知识; (3)熟悉Linux操作系统的常用命令; (4)掌握Linux操作系统的VI编辑器用法; (5)掌握Linux操作系统的gcc编译器用法; (6)了解uCLinux操作系统的基本知识; (7)掌握uCLinux操作系统内核编译环境的建立; (8)熟悉uCLinux内核编译步骤; (9)掌握将编译好的内核下载到系统运行的步骤; (10)掌握uClinux多任务编程与自启动。 1.2 课程设计的要求 (1)掌握课程设计所涉及到的相关知识。 (2)拓宽和加深学生对已学过的理论知识的理解,从而掌握比较全面的专业知识。 (3)进一步熟悉嵌入式系统软件开发流程,更深刻地理解嵌入式系统原理和相关接口电路的实现。 (4)按照要求撰写课程设计报告。
晶振电路知识讲解之晶体参数详解 1. 晶振与晶体的区别晶振是有源晶振的简称,又叫晶体则是无源晶振的简称,也叫(无源)一般是直插两个脚的无极性元件,需要借助(有源)一般是表贴四个脚的封装,内部有时钟电路,只需供电便可产生振荡信号。一般分7050、5032、3225、2520几种封装形式。 2. MEMS硅晶振与石英晶振区别MEMS硅晶振采用硅为原材料,采用先进的半导体工艺 3. 晶体谐振器的等效电路 4. 关键参数4.1 标称频率4.2 调整频差4.3 温度频差在整个温度范围内工作频率相对于基准温度时工作频率的允许偏离。常用ppm表示。4.4 老化率指在规定条件下,由于时间所引起的频率漂移。这一指标对精密晶体是必要的,但它“没有明确的试验条件,而是由制造商通过对所有产品有计划抽验进行连续监督的,某些晶体元件可能比规定的水平要差,这是允许的”(根据IEC的公告)。老化问题的最好解决方法只能靠制造商和用户之间的密切协商。4.5 谐振电阻(Rr)指晶体元件在谐振频率处的等效电阻,当不考虑C0的作用,也近似等于所谓晶体的动态电阻R1或称等效串联电阻(ESR)。这个参数控制着晶体元件的品质因数,还决定所应用电路中的晶体振荡电平,因而影响晶体的稳定性以致是否可以理想的起振。所以它是晶体元件的一个重要指标参数。一般的,对于一给定频率,选用的晶体盒越小,ESR的平均值可能就越高;绝大多数情况,在制造过程中并不能预计具体某个晶体元件的电阻值,而只能保证电阻将低于规范中所给的最大值。4.6 负载谐振电阻(RL)指晶体元件与规定外部电容相串联,在负载谐振频率FL时的电阻。对一给定晶体元体,其负载谐振电阻值取决于和该元件一起工作的负载电容值,串上负载电容后的谐振电阻,总是大于晶体元件本身的谐振电阻。4.7 负载电容(CL)与晶体元件一起决定负载谐振频率FL的有效外界电容。晶体元件规范中的CL是一个4.8 静态电容(C0)等效电路静态臂里的电容。它的大小主要取决于电极面积、晶片厚度和晶片加工工艺。4.9 动态电容(C1)等效电路中动态臂里的电容。它的大小主要取决于电极面积,另外还和晶片平行度、微调量的大小有关。4.10 动态电感(L1)等效电路中动态臂里的电感。动态电感与动态电容是一对相关量。4.11 谐振频率(Fr)指在规定条件下,晶体元件电气阻抗为电阻性的两个
模块划分 模块划分的"划"是规划的意思,意指怎样合理的将一个很大的软件划分为一系列功能独立的部分合作完成系统的需求。C语言作为一种结构化的程序设计语言,在模块的划分上主要依据功能(依功能进行划分在面向对象设计中成为一个错误,牛顿定律遇到了相对论),C语言模块化程序设计需理解如下概念: (1)模块即是一个.c文件和一个.h文件的结合,头文件(.h)中是对于该模块接口的声明; (2)某模块提供给其它模块调用的外部函数及数据需在.h中文件中冠以extern关键字声明; (3)模块内的函数和全局变量需在.c文件开头冠以static关键字声明; (4)永远不要在.h文件中定义变量!定义变量和声明变量的区别在于定义会产生内存分配的操作,是汇编阶段的概念;而声明则只是告诉包含该声明的模块在连接阶段从其它模块寻找外部函数和变量。如: 以上程序的结果是在模块1、2、3中都定义了整型变量a,a在不同的模块中对应不同的地址单元,这个世界上从来不需要这样的程序。正确的做法是: 这样如果模块1、2、3操作a的话,对应的是同一片内存单元。 一个嵌入式系统通常包括两类模块: (1)硬件驱动模块,一种特定硬件对应一个模块; (2)软件功能模块,其模块的划分应满足低偶合、高内聚的要求。 多任务还是单任务 所谓"单任务系统"是指该系统不能支持多任务并发操作,宏观串行地执行一个任务。而多任务系统则可以宏观并行(微观上可能串行)地"同时"执行多个任务。 多任务的并发执行通常依赖于一个多任务操作系统(OS),多任务OS的核心是系统调度器,它使用任务控制块(TCB)来管理任
务调度功能。TCB包括任务的当前状态、优先级、要等待的事件或资源、任务程序码的起始地址、初始堆栈指针等信息。调度器在任务被激活时,要用到这些信息。此外,TCB还被用来存放任务的"上下文"(context)。任务的上下文就是当一个执行中的任务被停止时,所要保存的所有信息。通常,上下文就是计算机当前的状态,也即各个寄存器的内容。当发生任务切换时,当前运行的任务的上下文被存入TCB,并将要被执行的任务的上下文从它的TCB中取出,放入各个寄存器中。 嵌入式多任务OS的典型例子有Vxworks、ucLinux等。嵌入式OS并非遥不可及的神坛之物,我们可以用不到1000行代码实现一个针对80186处理器的功能最简单的OS内核,作者正准备进行此项工作,希望能将心得贡献给大家。 究竟选择多任务还是单任务方式,依赖于软件的体系是否庞大。例如,绝大多数手机程序都是多任务的,但也有一些小灵通的协议栈是单任务的,没有操作系统,它们的主程序轮流调用各个软件模块的处理程序,模拟多任务环境。 单任务程序典型架构 (1)从CPU复位时的指定地址开始执行; (2)跳转至汇编代码startup处执行; (3)跳转至用户主程序main执行,在main中完成: a.初试化各硬件设备; b.初始化各软件模块; c.进入死循环(无限循环),调用各模块的处理函数 用户主程序和各模块的处理函数都以C语言完成。用户主程序最后都进入了一个死循环,其首选方案是: 有的程序员这样写: 这个语法没有确切表达代码的含义,我们从for(;;)看不出什么,只有弄明白for(;;)在C语言中意味着无条件循环才明白其意。 下面是几个"著名"的死循环: (1)操作系统是死循环; (2)WIN32程序是死循环; (3)嵌入式系统软件是死循环; (4)多线程程序的线程处理函数是死循环。 你可能会辩驳,大声说:"凡事都不是绝对的,2、3、4都可以不是死循环"。Yes,you are right,但是你得不到鲜花和掌声。实际上,这是一个没有太大意义的牛角尖,因为这个世界从来不需要一个处理完几个消息就喊着要OS杀死它的WIN32程序,不需要一个刚开始RUN就自行了断的嵌入式系统,不需要莫名其妙启动一个做一点事就干掉自己的线程。有时候,过于严谨制造的不是便利而是麻烦。君不见,五层的TCP/IP协议栈超越严谨的ISO/OSI七层协议栈大行其道成为事实上的标准? 经常有网友讨论: 等类似问题。面对这些问题,我们只能发出由衷的感慨:世界上还有很多有意义的事情等着我们去消化摄入的食物。 实际上,嵌入式系统要运行到世界末日。 中断服务程序 中断是嵌入式系统中重要的组成部分,但是在标准C中不包含中断。许多编译开发商在标准C上增加了对中断的支持,提供新的关
主要是处理器不一样,一般嵌入式系统用的是arm架构的处理器,属于专用处理器。一般的PC机用的是X86架构的处理器(intel、amd)属于通用处理器。 你可以把arm嵌入式系统看成是一个专用的pc。它比通用pc机所消耗的硬件资源要少。由于在一些特定的场合需要实现一些智能的操纵,使用通用pc机不合算(成本),使用嵌入式系统可以基本满足需要。显然,嵌入式系统的操作系统和硬件资源相对于pc机来说是进过精简的。 应用场合、系统结构、知识背景等等:百度百科上说的就很详细(直接百度百科“嵌入式系统”),这里不在累赘了。以看pc机的眼光看嵌入式系统就很简单了。 嵌入式系统架构的发展趋势及比较分析 嵌入式系统已经广泛地应用到当今各个领域,与我们的生活息息相关,小到掌上的数字产品,大到汽车、航天飞机。 提到嵌入式系统我们很快会联想到单片机,不错,MCU是最基础和常用的嵌入式系统,但是目前像FPGA、ARM、DSP、MIPS等其他嵌入式系统应用越来越广泛。嵌入式系统与模拟电路或其他功能电路组成的SoC(System on Chip,片上系统)或SiP(System in PAC kage,系统级封装)在手机、机顶盒等功能复杂的产品上的应用也越来越多。 总的来说,嵌入式系统发展呈现如下特点: ·由8位处理向32位过渡 ·由单核向多核过渡 ·向网络化功能发展 ·MCU、FPGA、ARM、DSP等齐头并进 ·嵌入式操作系统呈多元化趋势 所有的嵌入式处理器都是基于一定的架构的,即IP核(Intellectual Property,知识产权),生产处理器的厂家很多,但拥有IP核的屈指可数。有自己的IP核,光靠卖IP 核即可坐拥城池。 嵌入式系统的架构有专有架构和标准架构之分,在MCU(微控制器)产品上,像瑞萨(Renesas)、飞思卡尔(Freescale)、NEC都拥有自己得专有IP核,而其他嵌入式处理器都是基于标准架构。本文讨论仅讨论标准架构的嵌入式系统。 标准的嵌入式系统架构有两大体系,目前占主要地位的是所谓RISC(Reduced Instruction Set Computer,精简指令集计算机)处理器。RISC体系的阵营非常广泛,从ARM、MIPS、PowerPC、ARC、Tensilica等等,都是属于RISC处理器的范畴。不过
1.3.1 嵌入式操作系统的种类、特点与发展 1.嵌入式操作系统的种类 一般情况下,嵌入式操作系统可以分为两类: 非实时操作系统:面向消费电子产品等领域,这类产品包括个人数字助理(PDA)、移动电话、机顶盒、电子书等。 实时操作系统RTOS(Real-Time Embedded Operating System):面向控制、通信等领域,如windriver公司的vxworks、isi的psos、qnx系统软件公司的qnx等。 (1)非实时操作系统 早期的嵌入式系统中没有操作系统的概念,程序员编写嵌入式程序通常直接面对裸机及裸设备。在这种情况下,通常把嵌入式程序分成两部分,即前台程序和后台程序。前台程序通过中断来处理事件,其结构一般为无限循环;后台程序则掌管整个嵌入式系统软、硬件资源的分配、管理以及任务的调度,是一个系统管理调度程序。这就是通常所说的前后台系统。一般情况下,后台程序也叫任务级程序,前台程序也叫事件处理级程序。在程序运行时,后台程序检查每个任务是否具备运行条件,通过一定的调度算法来完成相应的操作。对于实时性要求特别严格的操作通常由中断来完成,仅在中断服务程序中标记事件的发生,不再做任何工作就退出中断,经过后台程序的调度,转由前台程序完成事件的处理,这样就不会造成在中断服务程序中处理费时的事件而影响后续和其它中断。 实际上,前后台系统的实时性比预计的要差。这是因为前后台系统认为所有的任务具有相同的优先级别,即是平等的,而且任务的执行又是通过FIFO队列排队,因而对那些实时性要求高的任务不可能立刻得到处理。另外,由于前台程序是一个无限循环的结构,一旦在这个循环体中正在处理的任务崩溃,使得整个任务队列中的其它任务得不到机会被处理,从而造成整个系统的崩溃。由于这类系统结构简单,几乎不需要RAM/ROM的额外开销,因而在简单的嵌入式应用被广泛使用。 (2)实时操作系统 所谓实时性,就是在确定的时间范围内响应某个事件的特性。而实时系统是指能在确定的时间内执行其功能并对外部的异步事件做出响应的计算机系统。其操作的正确性不仅依赖于逻辑设计的正确程度,而且与这些操作进行的时间有关。“在确定的时间内”是该定义的核心。也就是说,实时系统是对响应时间有严格要求的。 实时系统对逻辑和时序的要求非常严格,如果逻辑和时序出现偏差将会引起严重后果。实时系统有两种类型:软实时系统和硬实时系统。软实时系统仅要求事件响应是实时的,并不要求限定某一任务必须在多长时间内完成;而在硬实时系统中,不仅要求任务响应要实时,而且要求在规定的时间内完成事件的处理。通常,大多数实时系统是两者的结合。实时应用软件的设计一般比非实时应用软件的设计困难。实时系统的技术关键是如何保证系统的实时性。实时操作系统可分为可抢占型和不可抢占型两类。 嵌入式实时操作系统在目前的嵌入式应用中用得越来越广泛,尤其在功能复杂、系统庞大的应用中显得愈来愈重要。 从某种意义上说,没有操作系统的计算机(裸机)是没有用的。在嵌入式应用中,只有把CPU嵌入到系统中,同时又把操作系统嵌入进去,才是真正的计算机嵌入式应用。 操作系统的实时性在某些领域是至关重要的,比如工业控制、航空航天等领域。想像飞机正在空中飞行,如果嵌入式系统不能及时响应飞行员的控制指令,那么极有可能导致空难事故。有些嵌入式系统应用并不需要绝对的实时性,比如PDA播放音乐,个别音频数据丢失并不影响效果。这可以使用软实时的概念来衡量。
Crystal First Failure FL RR DLD2 RLD2 SPDB C0 C0/C1 C1 L ppm Ohms Ohms Ohms dB pF fF mH High Limit 20.0 80.0 8.0 80.0 -2.0 7.0 Low Limit -20.0 1.0 1 PASS 3.45 50.57 2.24 54.39 -4.66 3.83 3,744.84 1.0 2 10.75 2 PASS -5.84 32.05 4.18 36.30 -6.96 3.86 4,113.29 0.94 11.70 3 Fail DLD2 High 0.44 73.86 27.81 108.17 -3.59 3.74 3,613.27 1.03 10.63 4 Fail SPDB High -8.97 33.67 2.06 37.55 -0.44 3.92 5,538.01 0.71 15.54 5 PASS -1.27 40.11 1.65 42.75 -7.8 6 3.89 3,955.09 0.98 11.17 6 PASS -6.74 30.12 4.38 34.23 -9.58 3.81 3,608.85 1.06 10.42 7 PASS -3.52 41.97 1.52 42.86 -6.95 3.85 4,670.19 0.82 13.35 8 PASS 1.13 38.34 2.07 40.46 -4.15 3.88 5,017.95 0.77 14.23 9 PASS -7.01 21.31 0.73 21.80 -9.89 3.83 3,018.17 1.27 8.67 10 Fail DLD2 High -3.62 24.75 52.36 78.55 -10.30 3.86 2,943.39 1.31 8.37 晶振的等效电器模型 C0,是指以水晶为介质,由两个电极形成的电容。也称为石英谐振器的并联电容,它相当于以石英片为介质、以两电极为极板的平板电容器的电容量和支架电容、引线电容的总和。几~几十pF。 R1等效石英片产生机械形变时材料的能耗;几百欧 C1反映其材料的刚性,10^(-3)~ 10^(-4)pF L1大体反映石英片的质量.mH~H