昆明理工大学2010年硕士研究生招生入学考试试卷(A卷) 考试科目代码:810 考试科目名称:机械原理 试卷适用招生专业:080201机械制造及其自动化、080202机械电子工程、080203机械设计及理论、080204车辆工程、430102机械工程 考生答题须知 1.所有题目(包括填空、选择、图表等类型题目)答题答案必须做在考点发给的答题纸上,做在本试卷册上无效。 请考生务必在答题纸上写清题号。 2.评卷时不评阅本试卷册,答题如有做在本试卷册上而影响成绩的,后果由考生自己负责。 3.答题时一律使用蓝、黑色墨水笔或圆珠笔作答(画图可用铅笔),用其它笔答题不给分。 4.答题时不准使用涂改液等具有明显标记的涂改用品。
2、试求机构在图示位置的全部瞬心。(10分) 3、标出图示位置时凸轮机构的压力角,凸轮从图示位置转过90度后推杆的位移。(10分) 四、(15分,所有考生做)计算图示机构的自由度,若有复合铰链、局部自由度和虚约束,请指出。 五、计算题 A B C 2 3 1 4
1、在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电动机的转速 m in /14451r n =,求带轮转速的大小和方向。 (10分,所有考生做) 2、已知一渐开线规范外啮合圆柱齿轮机构,其模数mm m 10=,中心距mm a 350=,传动比 5/912=i ,试计算该齿轮机构的几何尺寸(各轮的齿数、分度圆直径、齿顶圆直径、齿根圆直径、 齿厚)。(16分,所有考生做) 3、在图示的轮系中,已知各轮的齿数20,50,40,60,2536421======z z z z z z (右旋) ,且各轮均为正确安装的规范齿轮,各齿轮的模数相同。当轮1以900r/min 按图示方向转动时,求轮6转速的大小和方向。 (全日制学术型,15分)
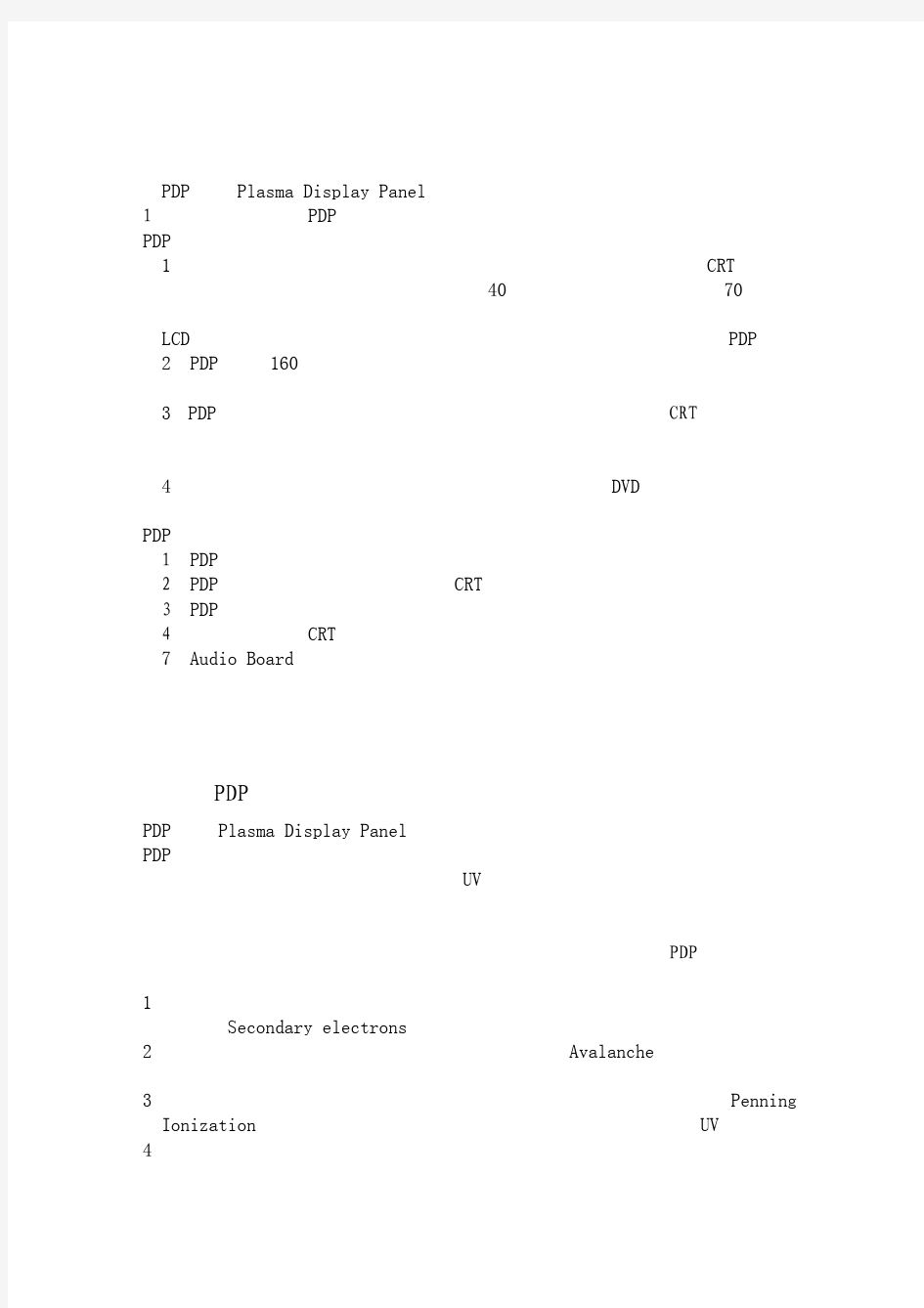
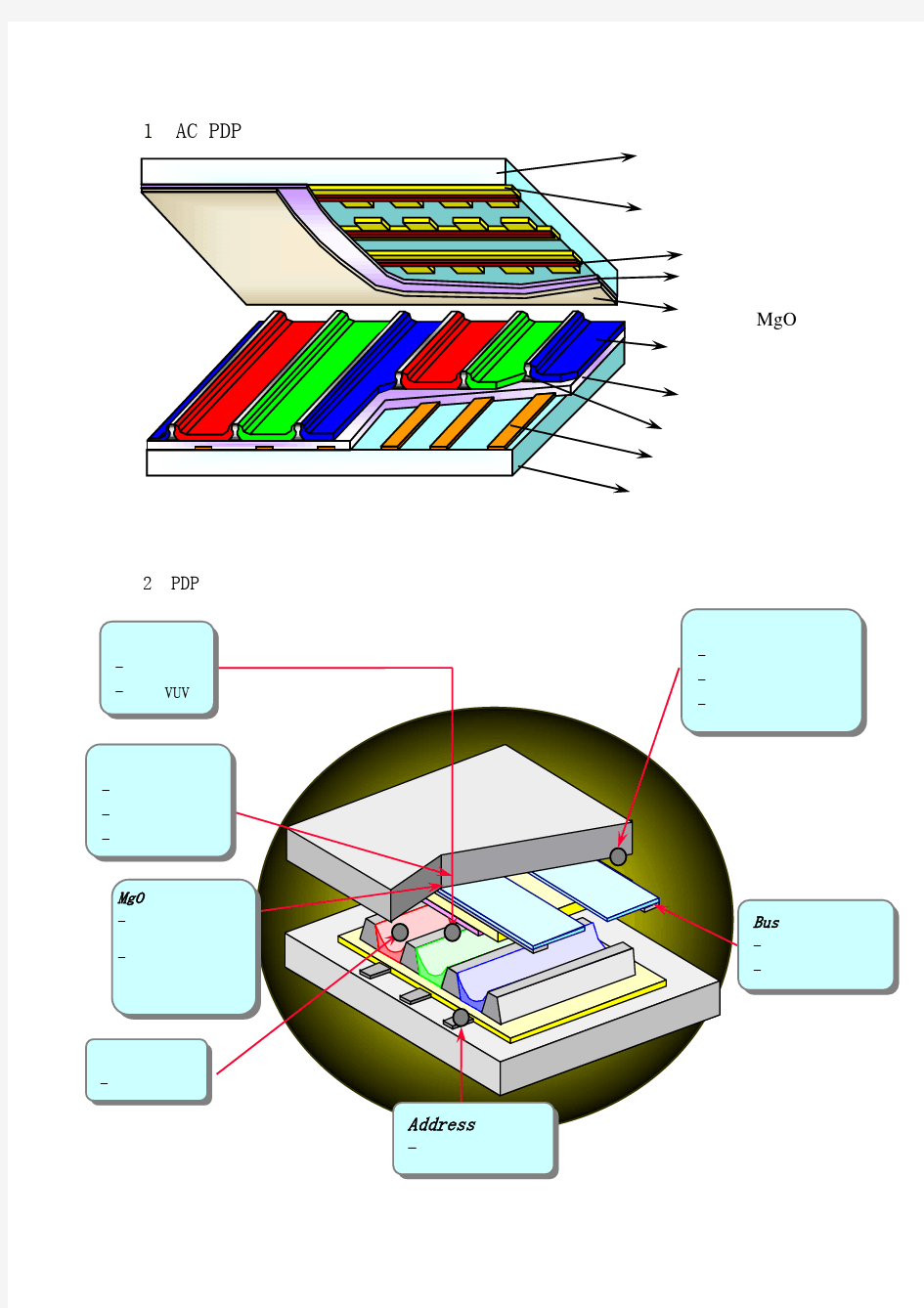
创维等离子电视原理与维修 一、发展简史 等离子体显示(Plasma Display Panel,简称PDP)是利用气体放电原理实现的一种发光平板显示技 术,故又称气体放电显示( GasDischarge Discharge Display)。按工作方式的不同,PDP技术可分为直流型等离子体显示(DC-PDP)和交流型等离子体显示(AC-P DP)两大类。 AC-PDP技术于1964年由美国伊利诺大学的两位教授发明。70年代初,美国率先实现了10in 512×512线单色AC-PDP 产品的量产,成为所有平板显示技术中最先实现批量生产的技术。因与阴极射线管(CRT)相比具有显示清晰、无闪烁、无畸变、无X射线辐射、驱动电压低、结构紧凑 、可靠性高、耐震动、耐冲击、工作温度范围宽,且适当加固即可满足军工要求等优点,AC-PDP产品被美国军方定为军用显示的重点。70年代末日本富士通公司和美国IBM公司分别开发了有MgO保护层的第二代单色AC-PDP产品,使用寿命达到1×104h。20世纪80年代初美国IBM公司采用集成驱动技术和标准接口技术开发了第三代单色AC-PDP产品,使工作寿命突破10×104 h。之后,产品向大显示容量和和高分辨率方向发展,实现了对角线达1m以上的大面积显示。1986年美国开发了对角线达1.5m显示容量为2048×2048线的大型单色AC-PDP 产品。80年代后相继推出了低功耗低成本灰度显示(256级)的第四代单色AC-PDP 产品。彩色AC-PDP技术的研发工作始于20世纪70年代中期,至90年代初才突破彩色化的亮度、寿命、驱动等关键技术。1993年日本富士通公司首次进行21in640×480像素的彩色AC-PDP产品的批量生产,揭开了彩色PDP通向规模生产的序幕。1994年三菱公司开始20in852×480像素彩色AC-PDP产品的批量生产。首次使真正的16:9宽屏幕壁挂电视进入实用化。1997年日本的三菱、先锋、NEC等公司和荷兰的Philips公司也开始了40in 和42in彩色AC-PDP产品的批量生产。 DC-PDP技术于1968年由荷兰发明。70年代初美国发明了自扫描式(SelfScan)的DC -PDP产品。但都因工艺复杂等原因未能实现真正的批量生产。80年代初日本松下公司利用全丝网印刷技术开发了结构简单的DC-PDP产品,并率先实现了批量生产。80年代中各公司又开发了全集成化和标准接口的第二代单色DC-PDP产品。1986年世界上第一台便携式计算机的显示屏就是使用了10in级640×480线的单色DC-PDP,此时单色DC-PDP 产品几乎占据所有便携式计算机市场,年产量达100万只。80年代后日本开发了超薄型轻量化的第三代单色DC-PDP产品。90年代初日本又开发了无需充汞的第四代DC-PDP产品。彩色DC-PDP 技术的研发开始于80年代初。80 年代末日本NHK公司发明了脉冲存储式DC-PD P 技术。90年代初突破了彩色化的关键技术 。1993年NHK公司率先开发了40in彩色DC-PDP 样品。1994年松下公司首先实现了 字符式多色DC-PDP产品的批量生产,1995年又开始进行26in彩色DC-PDP产品的批量生产。 二、基本原理和特点 1、PDP的发光原理 单色PDP是利用气体产生放电(形成等离子体)而直接发射可见光来实现显示的,其显示色一般为放电气体的特征色,如橙色。彩色PDP相同于荧光灯原理,利用气体放电产生紫外线转而激发光致荧光粉而间接发射可见光来实现显示的,使用三基色荧光粉就可以实现多色或全色显示。但是,无论单色还是彩色PDP,其主要工作机理都是基于惰性气体在一定电压作用下的气体放电现象。 单色PDP中放电气体常用Ne-Ar混合气体。产生放电时,气体内部最主要的反应是Ne原子的电离反应。由于受外部条件或引火单元激发,气体内部已存少量的带电粒子,其中电子被极间电场加速并达到一定动能时碰到Ne原子,使其电离导致自由电子增值,如此继续形成电离雪崩效应。在Ne气体中加入极少量Ar气体只是利用Ne 和Ar之间的一种电离反应来提高混合气体的电离截面,以加速电离雪崩。伴随这种气体电离雪崩过程,电子加速后与Ne原子碰撞也会使Ne被激发至更高能级但又不稳定的激发态Ne。这
机械原理与人体平衡知识分析 -----------------------作者:-----------------------日期:
三:综合训练 一:填空题: 1、一长直扁担长1.5m,前端挂200N的货,后端挂300N的货,则肩膀应该位于离扁担前端________m处,才能使扁担平衡,平衡后肩受到的压力为________N.(不计扁担的重力) 2、如图所示,用滑轮组匀速提升物体A时,测力计的示数为 N,如果不计滑轮重 和摩擦,物体A的重力为 N。 3.在图1所示的两种常用工具中,属于省力杠杆的是 (选填“甲”或“乙”).使用这两种工具都省功(选填“能”或“不能”). 4、如图所示,杠杆AC(刻度均匀,不计杠杆重)可绕支点O自由转动,在B点挂一重为G 的物体。为使杠杆平衡,应在杠杆上的_________点施加一个作用力,才能使作用力最小,该最小作用力与物重G的比值是___________。 5、如图2所示,物体 A 和 B 的质量相等(滑轮重力不计),当分别用力匀速提升物体A和B时,F A︰F B= 。 图1
6、钓鱼时,钓鱼竿可看成一根杠杆,如图3,它是一个________杠杆,其支点位于图中的________点.要使钓起鱼时省力一些,则钓鱼者两只手之间的距离应________一些(填增大或减小). 7、如图4,利用定滑轮匀速提升重物G ,需要拉力F 或'F ,F 和'F 大小的关系是F 'F 。(填大于、小于、等于) 8、 一辆汽车不小心陷入了泥潭中,司机按图5所示的甲乙两种方式可将汽车从泥潭中拉出,其中省力的是 图。 9、如图6所示,动滑轮重为50N ,绳重和摩擦不计,人对绳子的拉力是 260N ,则物体的重是 N ;若重物上升的高度是0.2m ,则绳子自由端 下降 m 。 10.如图7,每个钩码重0.49N,杠杆上每格长度相等,现用一弹簧测力计要求钩在支点右侧,使它的示数为0.98N,且杠杆在水平位置保持平衡,则弹簧测力计应钩在 点 图3 图4 图6
哈工大(威海)《机械原理》知识点整理 整理人:131310405郭勇辰 第一章 1.机械是机器与机构的总称。 2.机器是一种人为实物组合的具有确定机械运动的装置,用来完成有用功、转 换能量或处理信息,以代替或减轻人类的劳动。 3.现代化机器具有四个组成部分:原动机、传动机、执行机构和控制系统。 4.一部机器通常包含一个或若干个机构。机构是一个具有相对机械运动的构件 系统,或称它是用来传递与变换运动和动力的可动装置。 第二章 1.构件与零件的区别在于:构件是运动的单元,而零件是制造的单元。一个构 件既可以是一个零件,也可以是由若干零件装配而成的刚性体。 2.运动副:两构件间的直接接触又能产生一定相对运动的活动连接成为运动副。 3.一个运动副引入的约束数目最多只能是5个,最少是1个。 4.运动链:若干构件通过运动副连接而成的构件系统称为运动链。运动链中各 构件首位封闭,则称为闭式链,否则为开式链。 5.机构:如果将运动链中的一个构件固定作为参考坐标系,则这种运动链称为 机构。 6.运动副的分类:把引入1个约束的运动副称为Ⅰ级副,以此类推;以面接触 的运动副称为低副,以点或线接触的运动副称为高副;如果两运动副元素间只能相互做平面平行运动,则称之为平面运动副,否则为空间运动副; 7.不按比例绘制的运动简图成为机构示意图。 8.机构运动简图的单位为m/mm(图纸上1mm所代表的真实长度)。 9.自由度:确定一个构件或机构的运动(或位置)所需的独立参数的数目。 10.机构具有确定运动的条件是:机构的自由度大于零,且机构的原动件数目等 于机构的自由度数。 11.计算自由度时注意三种情况:复合铰链、局部自由度、虚约束。 12.复合铰链:由两个以上构件在同一处构成的重合转动副。 13.局部自由度:不影响整个机构运动的自由度。
第一章绪论 基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。 第二章平面机构的结构分析 机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。 1. 机构运动简图的绘制 机构运动简图的绘制是本章的重点,也是一个难点。 为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。 2. 运动链成为机构的条件 判断所设计的运动链能否成为机构,是本章的重点。 运动链成为机构的条件是:原动件数目等于运动链的自由度数目。 机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。 机构自由度计算是本章学习的重点。 准确识别复合铰链、局部自由度和虚约束,并做出正确处理。 (1) 复合铰链 复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。 正确处理方法:k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。 (2) 局部自由度 局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。局部自由度常发生在为减小高副磨损而增加的滚子处。 正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。 (3) 虚约束 虚约束是机构中所存在的不产生实际约束效果的重复约束。 正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。 虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。 3. 机构的组成原理与结构分析 机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。 第三章平面机构的运动分析 1.基本概念:速度瞬心、绝对速度瞬心和相对速度瞬心(数目、位置的确定),以及“三心定理”。 2.瞬心法在简单机构运动分析上的应用。 3.同一构件上两点的速度之间及加速度之间矢量方程式、组成移动副两平面运动构件在瞬时重合点上速度之间和加速度的矢量方程式,在什么条件下,可用相对运动图解法求解? 4.“速度影像”和“加速度影像”的应用条件。 5.构件的角速度和角加速度的大小和方向的确定以及构件上某点法向加速度的大小和方向的确定。 6.哥氏加速度出现的条件、大小的计算和方向的确定。 第四章平面机构的力分析 1.基本概念:“静力分析”、“动力分析”及“动态静力分析” 、“平衡力”或“平衡力矩”、“摩擦角”、“摩擦锥”、“当量摩擦系数”和“当量摩擦角”(引入的意义)、“摩擦圆”。 2.各种构件的惯性力的确定: ①作平面移动的构件; ②绕通过质心轴转动的构件;
【TPW3208海信32寸LG.PHILIPS 屏电源原理与维修】 32等离子电视于2007年大量上市,因为LG.PHILIPS 屏组件价廉的缘故,被国内很多厂家采用,如康佳PD32ES33 、长虹PT32600 、PT 32700 、海信TPW3208等。该屏电源板型号为PSU32FL-L1,主要由待机副电源、PFC电压形成、VS电源、Va电源、保护检测、电源CPU管理等电路构成,在电源管理CPU的控制下按照一定的时序输出各组电源。 和以往的42寸以上等离子屏电源相比,其主要特点是采用单面PCB板、VS高压电源部分采用常规的它激式PWM 电路(以往大都使用半桥或者全桥调频电源)、电源管理CPU检测到电源异常保护动作时,会将所有输出电源关闭,包括送往主板的待机STB电源,故安全性能更高、更方便检修。 电源方框图如下:(略) 下面将按照上电的时序,对电源的工作原理进行分析。 【一待机副电源电路】 1 、交流220V电源接通后,先经防高压、低通滤波器抗干扰后由D101整流成100Hz脉动直流电,再经D607对C617、C618充电滤波后送往由IC151/NCP1271、T201等元件组成的待机电源电路,产生电源管理CPU需要的VDD和Vcc1、Vcc2、Vcc4电源;还有受电源CPU控制输出的5V、STBY5V、5VSC、9V、16V和Vcc3等电源。 2、待机副电源工作原理简述:PFC电源(此时电压还是310V左右,未提升)经过T201初级线圈加到IC151的8脚上,IC内部恒流源对6脚外电容C154充电,达到8V左右开始启动振荡电路,副边绕组通过整流滤波开始输出各组电源,由U206/TL431、光藕PC201完成稳压取样反馈。副边绕组有3组,而且分热地电源和冷地电源两种。冷地电源部分:由D210、C211整流滤波输出大约6.5V电压,再经R215、ZD202稳压成+5V Vdd电压供给电源管理CPU;由D201、C202整流输出19V左右的VCC4电源.。热地电源部分:由D156、C156整流滤波出16V左右Vcc1电压,然后通过由Q152、ZD153组成的电子滤波器输出14V左右的Vcc2电源,Vcc2再通过D154隔离后给IC151 P6提供电源,降低其高压供电产生的功耗;以上几组电源是常有的、不受CPU控制。 6.5V电源后级还有5V、STBY5V和5VSC;Vcc4后级有9V和16V,Vcc1后级有14V的Vcc3,它们全部受电源管理CPU控制,其中STBY5V正常情况下是常有的,只有CPU得到保护指令才会关断。 【二、电源CPU管理电路】 电源管理主要由单芯片IC701/MC80F0308构成。 CPU得到VDD供电后开始振荡复位,然后从其(25)脚输出高电位到U205控制脚产生STBY5V电源,再通过排插P814(14)脚将STBY5V送到到主板上;IC701同时从其(15)脚通过排插P814(1)脚输出高电位的AC_ON检测信号到主板,完成上电初始化,等待主板传来的开机信号。 主板得到开机指令后,从排插P814的(2)、(3)脚分别输出高电平的RL_ON(继电器接通)、Vs_ON(VS启动)开机信号到IC701 (14)和(13)脚上,CPU接着分别从(10)、(8)、(19)、(20)脚输出各组电源需要的启动信号。 这里(10)、(8)、(19)脚受RL_ON控制输出5VSC、16V、9V、5V和PFC,(20)脚受Vs_ON控制输出Vs和Va 电源。 【三、5VSC、16V、9V、5V电源原理】 接到开机信号后,CPU(10)脚MULTI_ON信号由低电平跳变为高电平,加到U203控制端输出5VSC电源,同时经过Q203倒相放大加到MOS管Q201栅极,输出16V电源,16V再经过三端稳压IC U202产生9V电源;CPU (8)脚M5V_ON信号由高电平跳变为0V,经过Q205倒相放大加到U204上产生5V电源。 【四、PFC电源原理】 PFC电路由U601/FA5501、L601、Q603、Q602、,D605、D604、C617和C618等元件组成 接到开机指令,CPU(19)脚由高电平跳变为低电平,光藕PC153导通,Q601导通输出14V的Vcc3电源供到PFC电路。。 U601/FA5501 得到供电电压,IC启动开始工作,由于此时L601 副边绕组没有产生感应电流,IC(5)脚ZCD(过零检测)检测为零电流,IC (7)脚输出高电平,Q603和Q602导通将L601 (10)脚电压直接拉到地,L601初级线圈电流瞬间加大,由于初级线圈电流的变化感应得到次级线圈电流,此感应电流送至U601(5)脚零电流检测端,该电流不断加大,当增大到超过翻转的门限时,IC (7)脚输出低电平,Q603和Q602关闭,L601 (10)脚呈现高电压(L601 (13)(10)之间的感应电压与100Hz脉动直流电串联叠加,D605、D604正向导通对C617和C618充电,将PFC电压提升到390V左右),次级感应电流开始变小,当U601(5)脚电压小于1.4V时,IC输出翻转输
机械原理知识点总结 第一章平面机构的结构分析 (3) 一. 基本概念 (3) 1. 机械: 机器与机构的总称。 (3) 2. 构件与零件 (3) 3. 运动副 (3) 4. 运动副的分类 (3) 5. 运动链 (3) 6. 机构 (3) 二. 基本知识和技能 (3) 1. 机构运动简图的绘制与识别图 (3) 2.平面机构的自由度的计算及机构运动确定性的判别 (3) 3. 机构的结构分析 (4) 第二章平面机构的运动分析 (6) 一. 基本概念: (6) 二. 基本知识和基本技能 (6) 第三章平面连杆机构 (7) 一. 基本概念 (7) (一)平面四杆机构类型与演化 (7) 二)平面四杆机构的性质 (7) 二. 基本知识和基本技能 (8) 第四章凸轮机构 (8) 一.基本知识 (8) (一)名词术语 (8) (二)从动件常用运动规律的特性及选用原则 (8) 三)凸轮机构基本尺寸的确定 (8) 二. 基本技能 (9) (一)根据反转原理作凸轮廓线的图解设计 (9) (二)根据反转原理作凸轮廓线的解析设计 (10) (三)其他 (10) 第五章齿轮机构 (10) 一. 基本知识 (10) (一)啮合原理 (10) (二)渐开线齿轮——直齿圆柱齿轮 (11) (三)其它齿轮机构,应知道: (12) 第六章轮系 (14) 一. 定轴轮系的传动比 (14) 二.基本周转(差动)轮系的传动比 (14)
三.复合轮系的传动比 (15) 第七章其它机构 (15) 1.万向联轴节: (15) 2.螺旋机构 (16) 3.棘轮机构 (16) 4. 槽轮机构 (16) 6. 不完全齿轮机构、凸轮式间歇运动机构 (17) 7. 组合机构 (17) 第九章平面机构的力分析 (17) 一. 基本概念 (17) (一)作用在机械上的力 (17) (二)构件的惯性力 (17) (三)运动副中的摩擦力(摩擦力矩)与总反力的作用线 (17) 二. 基本技能 (18) 第十章平面机构的平衡 (18) 一、基本概念 (18) (一)刚性转子的静平衡条件 (18) (二)刚性转子的动平衡条件 (18) (三)许用不平衡量及平衡精度 (18) (四)机构的平衡(机架上的平衡) (18) 二. 基本技能 (18) (一)刚性转子的静平衡计算 (18) (二)刚性转子的动平衡计算 (18) 第十一章机器的机械效率 (18) 一、基本知识 (19) (一)机械的效率 (19) (二)机械的自锁 (19) 二. 基本技能 (20) 第十二章机械的运转及调速 (20) 一. 基本知识 (20) (一)机器的等效动力学模型 (20) (二)机器周期性速度波动的调节 (20) (三)机器非周期性速度波动的调节 (20) 二. 基本技能 (20) (一)等效量的计算 (20) (二)飞轮转动惯量的计算 (20)
等离子电视机原理与维修 管脚管脚定义管脚功能描述动态电压对地电阻(200K) 1AGC1自动增益控制1.88V 14K 2NC1 未接 2.27V 3ADD地OV O 4SCL IIC 总线时钟线 3.94-4.0V 17K 5SDA IIC 总线数据线 3.84-3.9V 18K 6NC2未接 7+5V-1 +5V 电源5.08V1.2K 8AFT未接 9+30V形成0?30调谐电压13.29V ?> 10NC3未接 11 IF1未使用(中频信号输出端口1) 12IF2未使用(中频信号输出端口2) 13SW0伴音制式控制5.08V 53K 14SW1伴音制式控制0.34V 53K 15NC4未接 16SIF未使用(第二伴音中频信号) 17AGC2自动增益控制1.88V 11.5K 18VEDIO CVBS 信号输出0.9V 0.11K 19+5V-2 +5V 电源 5.08V 0.9K 20 AUDIO音频信号输出2.08V 15K 农2 2、TV、AV、S端了、DVD隔行信号切换、解码及ADC转换处理 TV、AV、S端f、DVD隔行信号切换、解码及ADC转换处理由SAA7117完成。SAA7117是菲利浦公司开发的彩色多制式亮、色解码芯片。可同时接收16路模拟信号。内置四路快速信号源切换识别电路,充分满足用户不同设备(如机顶盒、个人自备视频设备、LCD播放器及DVD播放器等)的要求。 SAA7117内置PAL、NTSC及SECAM解码电路,自适应增强型数字梳状滤波电路、支持高清48 0I/576I 或480P/576P格式的Y/PB/PR或RGB信号接收。特有的图象缩放处埋功能,稳定的同步系统,支持接收诸如VCR格式的信号。具有壳度.对比度.色饱和度数字调整、画质淸晰度控制、直方图检测、自适应黑电平、白电平及动态对比度改善(DCI).彩色瞬态改善(CTI〉、自动肤色校正、蓝电平延伸及绿电平增强等
如今,等离子电视机是用的多了,但是故障仍然不可避免,下面为您介绍维修方法: 液晶背光板也称Inverter板即逆变器板,它的作用是将一个直流电压转变为多个交流电压,作为液晶屏灯管的工作电压,它的输入、输出连接框图如下图。背光板有三个输入信号,分别是供电电压、开机使能信号、亮度控制信号,其中供电电压由电源板提供,一般为直流24V(个别小屏幕为12V);开机使能信号ENA即开机控制电平由数字板提供,高电平3V时背光板工作,低电平0V时背光板不工作;亮度控制信号DIM由数字板提供,它是一个0-3V的模拟直流电压,改变这它可以改变背光板输出交流电压的高低,从而改变灯管亮度。背光板有多个交流输出电压,一般为AC800V,每个交流电压供给一个灯管。 液晶电视的背光板有三种,分别是采用CCFL灯管即冷阴极灯管的背光板、采用EEFL无冷阴极灯管的背光板和采用LED发光二极管的背光板。
CCFL(冷阴极荧光灯)背光源是目前液晶电视的最主要背光产品。冷阴极荧光灯,即CCFL(Cold Cathode Fluorescent Lamp),或称为CCFT(Cold Cathode Fluorescent Tube)。它的工作原理是当高电压加在灯管两端后,灯管内少数电子高速撞击电极后产生二次电子发射,开始放电,管内的水银或者惰性气体受电子撞击后,激发辐射出253.7nm的紫外光,产生的紫外光激发涂在管内壁上的荧光粉而产生可见光。 LED背光板采用发光二极管作为背光光源,是未来最有希望替代传统冷阴极荧光管的技术。发光二极管由数层很薄的搀杂半导体材料制成,一层带有过量的电子,另一层则缺乏电子而形成带正电的空穴,工作时电流通过,电子和空穴相互结合,多余的能量则以光辐射的形式被释放出来。通过使用不同的半导体材料可以获得不同发光特性的发光二极管。 以家电、家居生活为主营业务方向,提供小家电、热水器、空调、燃气灶、油烟机、冰箱、洗衣机、电视、开锁换锁、管道疏通、化粪池清理、家具维修、房屋维修、水电维修、家电拆装等保养维修服务。
1构件:具有确定运动的单元体组成的,这些运动单元体称为构件 零件:组成构件的制造单元体 运动副:两构件直接接触的可动联接 构件的自由度:构件的独立运动数目 运动链:若干个构件通过运动副所构成的系统 机架:固定的构件 原动件:机构中做独立运动的构件 从动件:机构中除原动件外其余的活动构件 运动链→机构:将运动链中的一个构件固定,并且它的一个或几个构件作给定的独立运动时,其余构件便随之作确定的运动,这样运动链就成了机构 2机构运动简图:表示机构中各构件间相对运动关系的简单图形。机构运动简图必须与原机械具有完全相同的运动特性。 示意图:只为了表明机械的结构,不按比例来绘制简图 3约束和自由度的关系:增加一个约束,构件就失去一个自由度 4机构具有确定运动的条件:机构自由度等于机构的原动件数 5瞬心:在任一瞬间,两构件的运动都可以看作是绕某一重合点的相对转动,该重合点称为他们的瞬心速度中心 绝对瞬心:运动构件上瞬时绝对速度为零的点 相对瞬心:两运动构件上瞬时绝对速度相等的重合点 6摩擦力增大并不是运动副元素材料间摩擦因数发生了变化,而是运动副元素的几何结构形状发生变化所致。 7摩擦圆:对于一具体的轴颈,r和fv为定值,因此ρ为定值,以轴心O 为圆心,ρ为半径做一圆,该圆成为摩擦圆。 8机械自锁:由于摩擦的存在,会出现无论施加多大的驱动力,都不能使机械沿驱动方向产生运动的现象。自锁条件:η≤0 机械发生自锁 9连杆机构(低副机构):若干个构件通过低副联接所组成的机构 10平面四杆机构基本形式:铰链四杆机构 11曲柄:在两连杆中能做整周回转机构 摇杆:只能在一定角度范围内摆动的构件 周转副:将两构件能做360°相对转动的转动副 摆动副:不能将两构件能做360°相对转动的转动副 12铰链四杆机构的曲柄存在条件:1最短杆与最长杆长度之和小于或等于其他两杆长度之和 2连架杆和机架中有一杆是最短杆 13最短杆为连杆时,该机构为双摇杆机构;最短杆为连架杆时,该机构为曲柄摇杆机构;最短杆为机架时,该机构为双曲柄机构; 14有急回运动:θ≠0时,偏置曲柄滑块机构和导杆机构 无急回运动:对心曲柄滑块机构和双摇杆机构
海信TPW32V69等离子彩电原理与维修 该机采用MST 9U19B 机芯,也称之为“M9机芯”。“69”系列外壳,是公司的一款高档电视。采用LG PDP32F1(852*480)等离子屏, 本机其主要功能特点: (1)多媒体功能具有D-sub 15 针VGA 接口,可以做为高性能电视显示器用,实现多媒体功能。 (2)全数字平板显示 整个画面真实完美再现,无边缘模糊和非线性失真等现象。 (3)多种画质改善电路 3D梳状滤波器,色彩优化等功能,运动画面和静态画面改善电路。 (4)自动搜索记忆系统采用频率合成式高频头,可记200个频道。 (5)LVDS 编码技术通过LVDS编码、解码技术,减低传输噪声。 (6)多模式宽屏显示 全屏16:9、4:3、缩放1、缩放2、全景等多种宽高比可供选择。 (7)采用PHILIPS 公司新型D 类声音功放电路。 更高的动态范围内完美再现声音,高效节能。 (8)中英文菜单可选 (9)节电保护模式 多媒体端口? 1路PC信号输入、1路HDMI输入、2路视频(A V1、A V2)输入、1路S视频输入、1路分量信号(YPBPR)输入、3路音频输入、1路音频输出、 一、高中频部分 该机的高中频采用U15和U17组成,射频信号(RF)经高频头U15接收,在内部进行带通滤波后再进行混频放大后输出38M的中频信号,38M的中频信号经过C133、R229分成2路,其中1路由C142耦合后经D54进入声表面滤波器U16(HS9455)输出伴音中频信号以平衡的方式输入到U17 的23 脚和24 脚。另1路由C148进入声表面滤波器(HS6274)U18,输出的图像中频信号同样以平衡的方式进入U17的1脚和2脚。另外U16和U18均有一个制式切换开关,受控于U5,其中U16受控于U17的22脚,U18受控于U17的第3脚。如果单纯的要求PAL D/K制,声表的控制脚接地即可。伴音中频信号在U17处理后由第8脚输出伴音信号.图像信号经U17处理后由17脚经R236、Q20射随后再经R241 (75Ω)输出全电视信号。此信号进入U8的54和55脚。另外由U17的14脚AGC电压输出经R233来控制高频头的1脚AGC脚。来自U8的170脚输出的IF-AFT信号控制U17 的第21 脚。该机采用的高中频处理多用分离件组成,与前期生产的TPW4233系列有很大的区别,前期的采用均为射频一体化高频头,相对简单一些。在高频头内进行高中频等处理,处理后可直接输出全电视信号和伴音信号。12脚输出的伴音载波差频信号经C165、Q23射随后经R257、C166输出TV-SIFP信号。 此单元重要元件 1、高频头U15 引脚 1 2 3 4 5 6 7 8 9 10 11 含义AGC NC AS SCL SDA 5V A 5VB NC 33V 空IF 电压 4.5 空地 3.4 3.4 5 5 空33 空0 说明第9脚的供电是由9V通过升压电路完成。
机械原理知识点归纳总结 第一章绪论 基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。 第二章平面机构的结构分析 机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。 1. 机构运动简图的绘制 机构运动简图的绘制是本章的重点,也是一个难点。 为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。 2. 运动链成为机构的条件 判断所设计的运动链能否成为机构,是本章的重点。 运动链成为机构的条件是:原动件数目等于运动链的自由度数目。 机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。 机构自由度计算是本章学习的重点。 准确识别复合铰链、局部自由度和虚约束,并做出正确处理。 (1) 复合铰链 复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。 正确处理方法: k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。 (2) 局部自由度 局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。局部自由度常发生在为减小高副磨损而增加的滚子处。 正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。
(3) 虚约束 虚约束是机构中所存在的不产生实际约束效果的重复约束。 正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。 虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。 3. 机构的组成原理与结构分析 机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。 第三章平面机构的运动分析 1.基本概念:速度瞬心、绝对速度瞬心和相对速度瞬心(数目、位置的确定),以及“三心定理”。 2.瞬心法在简单机构运动分析上的应用。 3.同一构件上两点的速度之间及加速度之间矢量方程式、组成移动副两平面运动构件在 瞬时重合点上速度之间和加速度的矢量方程式,在什么条件下,可用相对运动图解法求解? 4.“速度影像”和“加速度影像”的应用条件。 5.构件的角速度和角加速度的大小和方向的确定以及构件上某点法向加速度的大小和方 向的确定。 6.哥氏加速度出现的条件、大小的计算和方向的确定。 第四章平面机构的力分析 1.基本概念:“静力分析”、“动力分析”及“动态静力分析” 、“平衡力”或“平衡力矩”、“摩 擦角”、“摩擦锥”、“当量摩擦系数”和“当量摩擦角”(引入的意义)、“摩擦圆”。 2.各种构件的惯性力的确定: ①作平面移动的构件;
《机械原理》基础知识点 1构件:具有确定运动的单元体组成的,这些运动单元体称为构件 零件:组成构件的制造单元体 运动副:两构件直接接触的可动联接 构件的自由度:构件的独立运动数目 运动链:若干个构件通过运动副所构成的系统 机架:固定的构件 原动件:机构中做独立运动的构件 从动件:机构中除原动件外其余的活动构件 运动链→机构:将运动链中的一个构件固定,并且它的一个或几个构件作给定的独立运动时,其余构件便随之作确定的运动,这样运动链就成了机构 2机构运动简图:表示机构中各构件间相对运动关系的简单图形。机构运动简图必须与原机械具有完全相同的运动特性。 示意图:只为了表明机械的结构,不按比例来绘制简图 3约束和自由度的关系:增加一个约束,构件就失去一个自由度 4机构具有确定运动的条件:机构自由度等于机构的原动件数 5瞬心:在任一瞬间,两构件的运动都可以看作是绕某一重合点的相对转动,该重合点称为他们的瞬心速度中心 绝对瞬心:运动构件上瞬时绝对速度为零的点 相对瞬心:两运动构件上瞬时绝对速度相等的重合点 6摩擦力增大并不是运动副元素材料间摩擦因数发生了变化,而是运动副元素的几何结构形状发生变化所致。 7摩擦圆:对于一具体的轴颈,r和fv为定值,因此ρ为定值,以轴心O为圆心,ρ为半径做一圆,该圆成为摩擦圆。 8机械自锁:由于摩擦的存在,会出现无论施加多大的驱动力,都不能使机械沿驱动方向产生运动的现象。自锁条件:η≤0 机械发生自锁 9连杆机构(低副机构):若干个构件通过低副联接所组成的机构 10平面四杆机构基本形式:铰链四杆机构 11曲柄:在两连杆中能做整周回转机构 摇杆:只能在一定角度范围内摆动的构件 周转副:将两构件能做360°相对转动的转动副 摆动副:不能将两构件能做360°相对转动的转动副 12铰链四杆机构的曲柄存在条件:1最短杆与最长杆长度之和小于或等于其他两杆长度之和 2连架杆和机架中有一杆是最短杆 13最短杆为连杆时,该机构为双摇杆机构;最短杆为连架杆时,该机构为曲柄摇杆机构;最短杆为机架时,该机构为双曲柄机构; 14有急回运动:θ≠0时,偏置曲柄滑块机构和导杆机构
机械原理》考试知识点 第一篇基本机构及常用机构的运动学设计 第一章绪论 1.了解机械原理的研究对象及主要内容; 2.了解机械原理的地位和作用;3.了解机械原理的学习目的和方法。 第二章机构的结构分析与综合 1.掌握有关机构的概念,如构件、运动副、运动链、杆组等;2.掌握平面机构运动简图的绘制方法和步骤,能根据实际机械正确绘制机构运 动简图; 3.掌握机构具有确定运动的条件及平面机构自由度的计算,并注意复合铰 链、局部自由度和虚约束等情况; 4.掌握平面机构中高副低代的方法,要求代替前后,机构的自由度和机构的瞬 时运动不变; 5.掌握平面低副机构的结构分析和组成原理,能根据给定的机构运动简图进行 拆杆组,进行机构的结构分析,并确定机构的级别。 第三章平面连杆机构及其设计 1.了解平面连杆机构的类型、应用及其主要特点; 2.掌握平面连杆机构特别是它的基本形式——平面铰链四杆机构的一些基本概 念和基本知识及其演化方法和应用; 3.掌握平面连杆机构的运动特性和传力特性:如有曲柄的条件、急回特性和行 程速度变化系数、压力角与传动角、死点位置、运动连续性等; 4.掌握等视角定理及几何法刚体导引机构的设计;5.掌握机构的刚化反转法及几何法函数生成机构的设计;6.掌握急回机构的设计;
7.掌握用速度瞬心法作平面机构的速度分析方法; 8.掌握用相对运动图解法进行机构的运动分析方法; 9.掌握用复数矢量法进行机构的运动分析的方法。 第四章 凸轮机构及其设计 1.掌握凸轮机构的基本概念、凸轮机构的分类及应用; 2.掌握从动件常用的运动规律及从动件运动规律的设计原则; 3.掌握凸轮机构的反转法原理; 4.掌握图解法设计平面凸轮轮廓曲线的设计方法; 5.掌握解析法设计平面凸轮轮廓曲线的设计方法; 6.掌握凸轮机构的压力角及基本尺寸的设计。 第五章 齿轮机构及其设计 10. 掌握标准直齿圆锥齿轮的传动特点及其基本尺寸的计算。 第六章 轮系及其设计 1.掌握轮系的类型及功用; 1. 了解齿轮机构的类型和应用; 2. 3. 掌握齿廓啮合基本定律; 掌握渐开线的形成及其性4. 5. 掌握渐开线标准直齿圆柱齿轮的基本参数和几何尺寸计算; 掌握渐开线直齿圆柱齿轮的啮合传动特点,包括: 1)定传动比; 2)啮合线 与啮合角; 3)中心距的可分性; 3)正确啮合条件; 4)连续传动条件; 标准中心距和安装中心距; 6)无侧隙啮合条件等。 6. 掌握渐开线齿轮的范成法切齿原理、根切现象及最少齿数; 7. 8. 掌握渐开线齿轮的变位和变位齿轮的几何尺寸计算; 掌握平行轴斜齿圆柱齿轮齿廓曲面的形成、啮合、传动特点及标准几何尺寸计算; 9. 掌握蜗杆蜗轮传动的特点及其基本尺寸的计算;
选择 1.具有确定运动的差动轮系中,其原动件书目至少2个。 2.如果作用在轴颈上的外力增大,那么轴颈的摩擦圆不变。 3.机械出现自锁是由于机械效率小于零。 4.下列铰链四杆机构中,能实现急回运动的是曲柄摇杆机构。 5.正弦加速度运动既无柔性冲击,也无刚性冲击。 6.蜗杆传动的正确啮合条件:模数、压力角和螺旋方向均相同。 7.圆锥齿轮当量齿数:Zv=z/cosa。 ` 8.齿轮经过变为修正后,其分度圆同未修正时相比,分度圆不变。 9.渐开线齿轮中心距稍有改变,其角速度比扔保持原值不变的 原因是基圆不变。 10.刚性转子的动平衡是使惯性合力为0,惯性力合力偶矩也为0. 11.基本杆组是自由度等于0的运动链。 12.曲柄摇杆机构处于死点位置时,传动角等于零。 13.外槽轮:0.5-1/z;内槽轮:0.5+1/z。 ! 14.减小凸轮基圆半径,则压力角增大。 15.回转件的平衡问题,主要是讨论机构的惯性力和惯性矩对 从动件的平衡。 16.渐开线标准直齿轮不发生根切的最小齿数为Zmin=2ha/sina^2. 17.渐开线直齿圆柱齿轮与齿条啮合时,其啮合角恒等于齿轮 分度圆压力角。 18.飞轮安装在高速轴上可以减轻重量。 《 19.阿基米德圆柱蜗杆与涡轮传动的中间平面模数,应符合标准值。 20.标准压力角和标准模数均在分度圆上。21.滚子半径应小于理论轮廓线的最小曲率半径。 22.曲柄滑块机构是由曲柄摇杆机构演化而来。 23.棘轮机构的主动件是棘爪。 24.渐开线直齿圆柱齿轮传动中,中心距不影响传动比。 填空 》 1.机械是机构和机器的总称。 机器是一种用来变换和传递能量、物料与信息的机构的组合。 10.什么叫构件?机械中独立运动的单元体 2.平面四杆机构有6个速度瞬心,其中3个是绝对瞬心。 3.渐开线斜齿圆柱齿轮正确啮合的条件是模数、压力角和螺旋角 分别相等。 4.根切现象:用范成法切制齿轮时,有时刀具会过多的切入齿轮的底部,因而将齿轮的渐开线 ! 切除一部分的现象。 5.一对渐开线齿轮正确啮合的条件: 直齿轮:两齿轮的模数和压力角应分别相等,m1=m2=m ,d1=d2=d 斜齿轮:两齿轮的模数和压力角应分别相等,还有他们的螺旋角必须满足:外啮合B1=-B2, 内 啮合B1=B2. 锥齿轮:当量齿轮的模数和压力角与锥齿轮断面的模数和压力角相等。 蜗轮蜗杆:Mx1=Mt2=M Dx1=Dt2=D : 当蜗杆和涡轮的轴线交错角为90°时,还需保证蜗杆的导程角等于涡轮的螺旋角,即使y1=B2, 并且螺旋线的方向相等。 6.齿廓啮合基本定律:相互啮合传动的一对
《机械原理》课程教学大纲 课程名称:机械原理课程代码:MEAU3005 英文名称:Theory of Machines and Mechanisms 课程性质:大类基础课程学分/学时:3学分/54学时 开课学期:第4学期 适用专业:机械工程、机械电子工程、材料成型及控制工程 先修课程:高等数学、工程图学、理论力学、C语言程序设计等 后续课程:无 开课单位:机电工程学院课程负责人:司广琚 大纲执笔人:司广琚大纲审核人:倪俊芳 一、课程性质和教学目标(在人才培养中的地位与性质及主要内容,指明学生需掌握知识与能力及其应达到的水平) 课程性质:机械原理课程是机械类各专业中研究机械共性问题的一门主干技术基础课。它的任务是使学生掌握机构学和机械动力学的基本理论、基本知识和基本技能,并初步具有拟定机械运动方案、分析和设计机构的能力。它在培养高级工程技术人才的全局中,具有增强学生对机械技术工作的适应能力和开发创造能力的作用。 教学目标:本课程以《理论力学》知识作为理论基础,将所学《理论力学》知识应用到机器和机构分析设计中,但因为机器和机构的复杂和多样性,因而它不是理论力学知识简单重复和堆砌,具有很强的工程实践性。基于此本课程在理论上具有基本概念多、逻辑性强、内容分散等特点,实践上又具有工程中解决问题方法的灵活和巧妙、设计的多方案性、求解问题方法的多样性等特点,是一门理论性和实践性均较强的课程。目标是使学生掌握机构学和机器动力学基本理论、基本知识和基本技能,学会各种常用基本机构分析和综合方法,并具有按照机械使用要求进行机械传动系统方案设计的初步能力和机械创新设计的素质。 本课程的具体教学目标如下: 1.掌握机械、机器、机构、构件、零件等基本概念; 2.掌握平面机构的表示方法和机构运动的基本条件; 3.掌握平面连杆机构、凸轮机构、齿轮机构、螺旋机构等机械中常用机构的组成、工作原理、工作特性、应用特点等基本知识。; 4.掌握齿轮系的类型、功用和传动比的计算方法。掌握圆柱齿轮传动、圆锥齿轮传动和蜗杆传动的知识; 5.了解间歇运动机构的类型、基本特性和应用特点; 6.了解机械动力学的基本理论。