实验十三望远镜的指向精度与跟踪精度的测试
-------测试结果与误差分析
[实验目的]
1、掌握测试望远镜的指向精度与跟踪精度的原理和方法,并能够独立进行测试。
2、掌握对数据进行处理的方法,并学会正确的分析数据得出结果。
[实验仪器]
40 cm反射望远镜(教九)
本实验使用的望远镜为卡塞格林R-C系统,赤道式装置。两个度
盘分别为赤纬(δ),时角(t),主镜为凹的双曲面镜,口径D=
400 mm,副镜为凸的双曲面镜,系统的有效焦距F= 6000 mm ;
导星镜为D= 150 mm、F= 1980 mm的折射望远镜,见右图
[实验方法]
1、测试望远镜的指向精度
在天空的不同方位及高度区域选择好待测试的亮星,使用sky map控制望远镜,将望远镜指向某恒星,之后记下其方位值、仰角、经度、纬度,再手控望远镜,将恒星调到望远镜目镜的十字中心,记下经度纬度,与前面的经纬度之差便为望远镜指向误差。
2、测试望远镜的跟踪精度
打开转移钟,把某恒星调到目镜的十字中心,观察望远镜视场中心的星像,在从中央渐渐移到目镜视场边缘的过程中,记录观察的时间段可选Δt = 30s、1min、2min…,检查星象有无明显移动,利用视场的大小比例(例如星像移动了1/5 的视场)和观察的时间段,计算星像在1s内星移动的角距离,即0.2ω/Δt 。
[实验步骤]
1、打开控制望远镜工作的电源的总开关。
2、在圆顶控制遥控上按下“天窗开”,打开天窗。取下望远镜的筒盖。
3、在检查接线都正确后,打开电控系统电源开关,仪器通过自检后,即可对望远镜进行操
作。此时电控系统显示屏上显示当前望远镜指向的赤经、赤纬值,仰角、方位值,以及本地恒星时,还显示当前的地理位置以及北京时间、GPS工作状态,天文圆顶状态和跟踪方式。
4、打开与望远镜相接的计算机上的skymap软件,在“Skymap”菜单中选择“望远镜”、“配
置”,在软件菜单中选择“望远镜”、“打开连接”。然后找到自己预习时查的星,如:天鹰α。再单击鼠标右键,“转到…”,望远镜便开始寻星直到指向该星。调动园顶的天窗对准望远镜。从电控系统显示屏上记录下该星的方位角A、仰角h、赤经α与赤纬δ。
5、在望远镜的目镜中观察天体的像,控制望远镜手柄,将星像调到目镜的十字中心。再记
下此位置显示屏上的赤经α1和赤纬δ1。
6、进行望远镜跟踪精度的测试:
先将待测天体调到目镜的十字中心,记录下该瞬间的经度T1。
对处在目镜十字中心的天体进行跟踪观察,记录该天体从中央渐渐移到目镜视场边缘的过程。
7、换不同方位及高度的天体重复步骤4、5、6。
8、实验结束。先给望远镜盖上盖,再对望远镜进行归位。关闭圆顶,待望远镜归位后,关
闭所有电源。
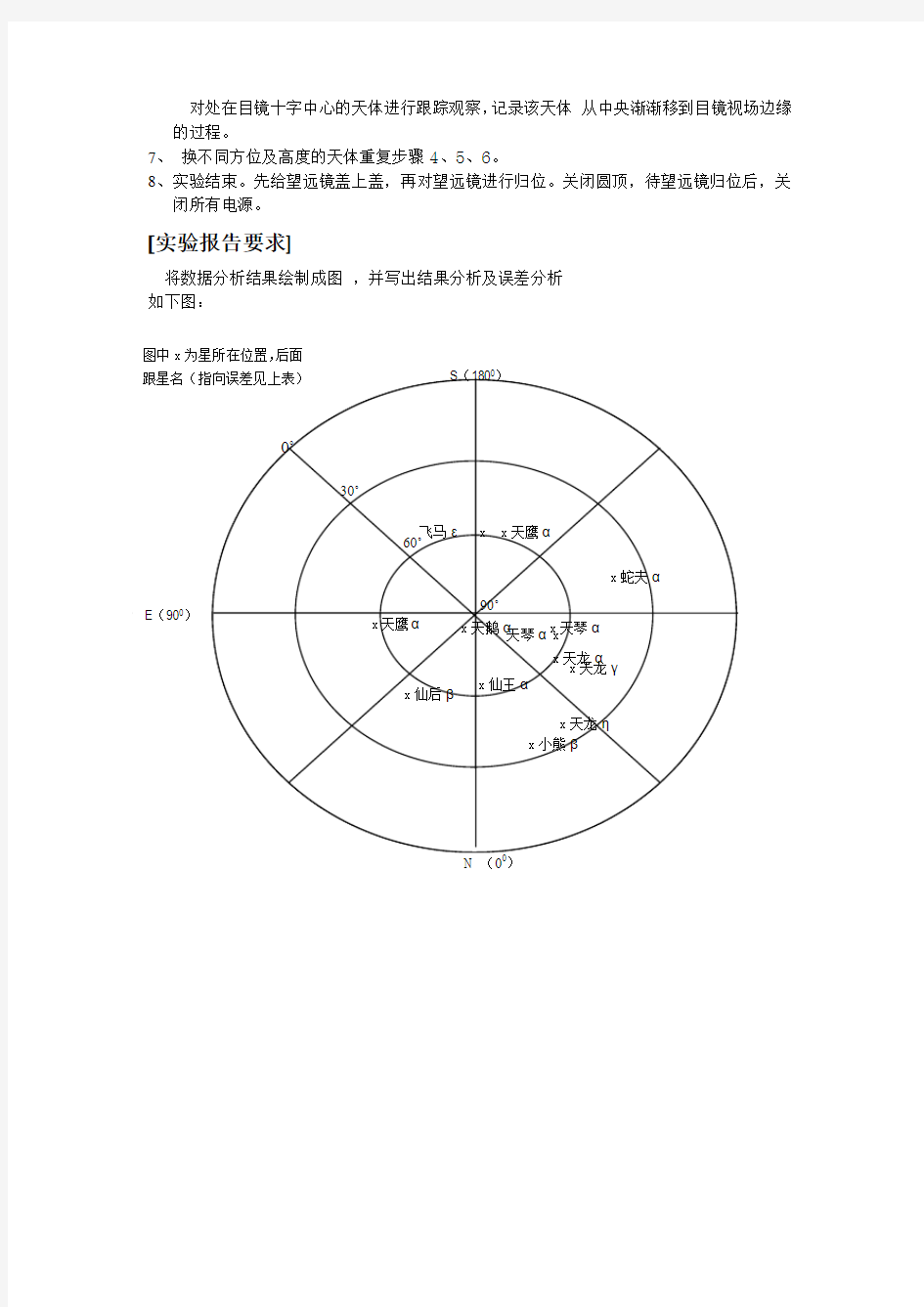
[实验报告要求]
将数据分析结果绘制成图,并写出结果分析及误差分析
如下图:
张小只智能机械工业网 张小只机械知识库工业机器人的重复定位精度是如何测量的 重复定位精度是工业机器人最重要的性能指标之一。位置重复性是工业机器人制造商指定的唯一的定位性能指标,在他们的宣传册上有0.010 毫米和0.100 毫米之间变化。然而,计量从此发生了改变,到底如何测量位置重复性的大小? 如果你幸运的话,像我们先进的计量设备有很多,你可以使用激光干涉仪。后者是非常准确的(0.001 毫米测量不确定度),但价格昂贵(约50000美元),难以建立措施在同一时间只有一个坐标。你也可以使用CMM,但这显然是不现实的。你可以 使用各种类型的三维测量设备,但某些工业机器人制造商使用激光跟踪仪因为他们已经使用一些机器人标定激光跟踪仪。所以我们到底应不应该应该相信工业机器人厂商提供的重复数据? 一个基本的方法在ISO/TR 13309:1995提出依托三个正交使用位置传感器的安装。我最近买了一个这样的装置:三一探针IBS精密工程。后者是无线的,轻便小巧,而且不贵(约15000美元)。其测量不确定度约为0.001 mm,其测量范围是3.5 毫米。不幸的是,它采用电涡流传感器需要特殊基准球,成本超过500美元每安装在纤细的茎而且很容易打破。 一个非常重要的,我们的三维探测新的组件标定板。后者本质上是以三球的原理在三V形槽的运动平台。在测试我们的三维探头在发那科LR伴侣200iC的工业机器人(借给我们的通用航空)和ABB IRB 120机器人时,我们使用一个定制的枢接座三0.5″基准球,每一对分开约300毫米。使用非常简单的matlab代码,我们可以从每一个数字指标获取位置数据并发送到机器人控制器通过以太网。每个机器人的控制器,然后运行一个程序,执行自动测试。这个测试程序如下。
定位精度、重复定位精度的概念以及国家相关标准 许多人经常听到定位精度和重复定位精度的说法但却对它们的概念以及检测方法很模糊本文将阐明其概念并就给出国家标准GB/T 17421.2-2000等同于国际ISO230-21997---数控轴线的定位精度和重复定位精度的确定。GB/T 17421.2-2000 数控轴线的定位精度和重复定位精度的确定 1. 范围本标准规定了通过直接测量机床的单独轴线来检验和评定数控机床的定位精度和重复定位精度的方法。这种方法对直线运动和回转运动同样适用。本标准适用机床的型式检验验收检验比较检验定期检验也可用于机床的补偿调整检验。本标准不适用于需同时检验几个轴线的机床。 2. 定义和符号本标准采用以下定义和符号 2.1. 轴线行程在数字控制下运动部件沿轴线移动的最大直线行程或绕轴线回转的最大行程。 2.2. 测量行程用于采集数据的部分轴线行程。选择测量行程时应保证可以双向趋近第一个和最后一个目标位置。 2.3. 目标位置i 1 至m 运动部件编程要达到的位置。下标i表示沿轴线或绕轴线选择的目标位置中的特定位置。 2.4. 实际位置Piji 1 至mj 1 至n 运行部件第j次向第i个目标位置趋近时实际测得的到达位置。 2.5. 位置偏差Xij 运动部件到达的实际位置减去目标位置之差。Xij Pij Pi 2.6. 单向以相同的方向沿轴线或绕轴线趋近目标位置的一系列测量。符号↑表示从正方向趋近所得的参数符号↓表示从负方向趋近所得的参数。 2.7. 双向从两个方向沿线轴线或绕轴线趋近某目标位置的一系列测量所测得的参数。 2.8. 扩展不确定度定量地确定一个测量结果的区间该区间期望包含大部分的数值分布。 2.9. 覆盖因子为获得扩展不确定度而用标准不确定度倍率的一个数值因子。 2.10. 某一位置的单向平均位置偏差由n次单向趋近某一位置Pi所得的位置偏差的算术平均值。 2.11. 某一位置的双向平均位置偏差从两个方向趋近某一位置Pi所得的单向平均位置偏差 2.12. 某一位置的反向差值Bi 从两个方向趋近某一位置时两单向平均位置偏差之差。2.1 3. 轴线反向差值B 沿轴线或绕轴线的各个目标位置的反向差值的绝对值Bi中的最大值。 2.14. 轴线平均反向差值B 沿轴线或绕轴线的各个目标位置反向差值Bi的算术平均值。 2.15. 在某一位置的单向定位标准不确定度的估算值Si↑或Si↓ 通过对某一位置Pi的n次单向趋近所得获得的位置偏差标准不确定度的估算值。 2.16. 某一位置的单向重复定位精度Ri↑或Ri↓ 由某一位置Pi的单向位置偏差的扩展不确定度确定的范围覆盖因子为 2.18. 轴线单向重复定位精度R↑或R↓以及轴线双向重复定位精度R 沿轴线或绕轴线的任一位置Pi的重复定位精度的最大值。 2.19. 轴线单向定位系统偏差E↑或E↓ 沿轴线或绕轴线的任一位置Pi上单向趋近的单向平均位置偏差的最大值与最小值的代数差。 2.20. 轴线双向定位系统偏差E 沿轴线或绕轴线的任一位置Pi上双向趋近的单向平均位置差的最大值与最小值的代数差。 2.21. 轴线双向平均位置偏差M 沿轴线或绕轴线的任一位置Pi的双向平均位置偏差的最大值与最小值的代数差。
河海大学 毕业论文 ATR自动目标识别及定位精度研究 专业年级98测量一班 学生姓名衣冰、廖晟、张福 指导教师黄腾 陈光保 评阅人 2002年6月
目录 前言 (2) 第一章ATR的使用意义及介绍 (3) §1,1工程建筑物安全监测自动化的意义 (3) §1,2 ATR自动目标识别及定位精度研究的意义 (3) §1,3TCA2003全站仪简介 (4) §1,4 ATR自动目标识别及定位 (5) 1,4,1原理简介 (5) 1,4,2精确定位 (5) 1,4,3 ATR测量的过程 (7) 1,4,4 目标跟踪反馈环 (7) 1,4,5目标跟踪 (8) §1,5自动观测软件 (8) 1,5,1自动观测软件简介 (8) 1,5,2操作步骤 (9) 第二章ATR外业实验部分 (11) §2,1网形的选择 (11) §2,2实验的具体步骤 (12) 2,2,1 ATR测角及观测成果 (12) 2,2,2人工测角及观测成果 (31) 2,2,3边长反算角度 (35) 第三章数据处理及精度分析 (37) §3,1边长反算角度 (37) §3,2成果比较及精度分析 (39) §3,3.精密测角的误差影响 (42) §3,4.测量时的具体情况 (42) §3,5 TCA2003 (43) 第四章外文资料及翻译 (46) 第五章结语 (51)
前言 随着科学技术的发展,测量行业在技术和仪器上都有了长足的发展,给这个行业带来了勃勃生机和前进力量。ATR技术就是电子技术和自动化技术不断发展的结果。全站仪是智能型测量仪器,被誉为测量机器人。它利用自控马达和CCD相机来完成搜索目标、精确照准和自动观测三个过程,来实现自动测量。本实验使用TCA2003全站仪和开发的自动测量程序,进行多种情况下(不同距离、不同大气环境等)的自动观测实验,并且与人工测量和精密测边反算角度作比较,来评定ATR的测量精度,并寻求高精度的ATR观测条件。并得出相应结论,供今后使用查询。 关键词: ATR 全站仪精度分析自动观测TCA2003
计算机科学与技术学院 毕业设计(论文) 论文题目基于模板匹配的目标跟踪技术研究与实现 指导教师职称讲师 学生姓名学号 专业网络工程班级 系主任院长 起止时间2013年10月11日至2014年5月23日 2014年5月23日
目录
基于模板匹配的目标跟踪技术研究与实现 摘要:视频目标跟踪是计算机视觉领域中一个非常活跃的研究领域,近年来已经逐渐成为学者们研究的热点。本文主要对模板匹配算法在目标跟踪领域中的应用进行研究,并对跟模板匹配目标跟踪相关的一些技术问题进行了深入的探讨。在Visual studio 2008开发环境下结合MFC和开源计算机视觉库(Open Computer Vision,OpenCV)用程序语言实现基于模板匹配的目标跟踪算法,并在图像序列上对模板匹配跟踪算法在降低复杂度和抗目标旋转方面的有效性进行了验证。关键词:Visual studio 2008;OpenCV;模板匹配;角度旋转匹配;目标跟踪
Design and Implementation of Template matching and tracking by using OPENCV Abstract: Video object tracking is a very active field of research in the field of computer vision, in recent years has gradually become the focus of the researchers. This paper mainly studies the matching algorithm in the field of target tracking on the template, and the template matching target tracking with some related technology problems are discussed. The combination of MFC and open-source computer vision library in Visual studio2008 development environment (Open Computer Vision, OpenCV) tracking algorithm for template matching based object language, and matching tracking algorithm is verified effective in lowering the complexity and anti rotation target template in image sequences. Key words: Visual studio 2008; OpenCV; template matching; rotation matching;Object tracking
第32卷 第1期 光电工程 V ol.32, No.1 2005年1月 Opto-Electronic Engineering Jan, 2005 文章编号:1003-501X (2005) 01-0016-04 高精度跟踪控制系统中电流环控制技术研究 黄永梅,张 桐,马佳光,付承毓 ( 中国科学院光电技术研究所,四川 成都 610209 ) 摘要:在跟踪控制系统中,速度回路控制对象的特性对控制系统的跟踪精度有很大的影响。根据电流负反馈的基本原理,在位置、速度双闭环的基础上加入了电流反馈传感器,设计了电流环校正网络。仿真和实验表明,电流环有效地改善了速度回路控制对象的特性,提高了速度回路的低频增益,控制系统位置回路的跟踪精度约有10倍的提高。 关键词:电流环;跟踪控制系统;速度回路;闭环控制 中图分类号:V556 文献标识码:A Study on the control of a current loop in a high-accuracy tracking and control system HUANG Yong-mei, ZHANG Tong , MA Jia-guang, FU Cheng-yu (The Institute of Optics and Electronics , the Chinese Academy of Sciences , Chengdu 610209, China ) Abstract : In a tracking and control system, the tracking accuracy of the control system mainly depends on the features of the object in the velocity loop. According to the basic principle of current negative feedback and through adding some current feedback sensors on the basis of position and velocity dual-loop, a current loop is designed. The simulation and experiment results show that the control object character is effectively improved and the low-frequency gain of the velocity loop is raised by the current loop. The tracking accuracy of the position loop in the control system is enhanced by about 10 times. Key words : Current loop ;Tracking control systems ;Velocity loop ;Closed loop control 引 言 在以往的跟踪控制系统中,多采用速度、位置双闭环系统,此时速度回路的控制对象为二阶惯性环节和一振荡环节,其中二阶惯性环节代表控制电机机电特性和电气特性,惯性环节的时间常数分别为电机的机电时间常数和电气时间常数,振荡环节代表控制机架的机械谐振特性,基于这样的控制对象特性,速度回路的低频增益受系统相位裕度的影响,很难有大的提高,这必然影响位置回路的跟踪精度。电流环控制就是在速度环内再加一个电流反馈传感器和电流反馈校正网络,构成电流闭环控制系统,以改变速度回路控制对象的特性,提高控制系统的跟踪精度。 1 电流环分析及设计 直流电动机在额定励磁条件下且电枢电流连续时,电枢回路的动态电压平衡关系式为[1] )d /d (a a d0t I L R I E U ++= (1) n C E e = (2) 式中 U d0为电机的电枢电压,I a 为电机的电枢电流,R 为电枢回路的总电阻,L 为电枢电感,E 为电机的反 收稿日期:2004-10-19;收到修改稿日期:2004-12-13 基金项目:863-802“快速高精度跟踪控制技术研究”课题 作者简介:黄永梅(1968-),女(汉族),四川内江人,博士生,主要研究方向为光电跟踪控制系统、DSP 数字信号处理系统。 E-mail: hjn666@https://www.doczj.com/doc/d49364448.html,
低成本的高精度定位技术-UWB定位 除了全球定位系统(GPS)在导航和室外环境的应用定位以外,人们对室内定位、短距离定位等应用不甚了解。随着各式各样的建筑的建立人们在室内的时间是室外的4倍,室内定位的需求也越来越大。 未来无线定位技术的趋势是室内定位与室外定位相结合,实现无缝的、精确的定位。现有的网络技术还不能完全满足这个要求,而UWB技术由于功耗低、抗多径效果好、安全性高、系统复杂度低、定位精度极高等优点,在众多无线定位技术中脱颖而出。 UWB定位实现原理: 超宽带(Ultra Wide-Band,UWB)UWB定位是一种新型的无线通信技术。该技术采用TDOA(到达时间差原理),利用UWB技术测得定位标签相对于两个不同定位基站之间无线电信号传播的时间差,从而得出定位标签相对于四组定位基站的距离差。 使用TDOA技术不需要定位标签与定位基站之间进行往复通信,只需要定位标签只发射或只接收UWB信号,故能做到更高的定位动态和定位容量。 UWB定位特点: 1.定位基站之间使用无线同步,减少施工成本 2.网络简单,部署规划成本极低,自恢复能力强 3.可选多种基站定位方式,定位标签续航时间最短超过一个月。具有电量监测效用,定位基站电量不足时及时提醒充电 4.终端实时显示位置信息,实现导航效用,容量无限大 5.可通过移动通信网络实现远程位置跟踪 6.可应用于复杂的工业现场,以最优性价比实现了较好的效果
UWB定位的应用可以为哪些行业带来改变? 工业制造: UWB定位系统可以实时记录显示工人位置信息,实现自动考勤,提高员工出勤率;通过跟踪监测人员、物资、设备,来保障物资及工人的安全、减少人工管理成本。 医院、养老院: 老人或病人,由于生活自理能力差,且自我判断和保护能力不足,容易迷失方向,遇到危险时也很难实现自救和求助。 通过UWB定位技术能够有效对老人和医院病人可以实时的跟踪定位,及时处理应急情况,为他们的生命健康安全和日常生活提供有力保障,同时减轻工作人员的压力。 司法监狱: 监狱安全管理一直是备受关注的问题,通过UWB定位技术如何杜绝监狱犯人管理漏洞、降低监管执法风险呢? 运用UWB定位技术能够很好监管:实时掌握人员的实时位置、人数清点、监狱犯人腕带防拆报警、电子围栏、聚众分析、行动轨迹跟踪、回放、摄像联动警报等,能够很大程度的降低监管执法的风险,防止意外事故的发生。 隧道: 隧道施工过程中作业现场点多面广,安全管控难度大。运用UWB定位可以提供的集风险管控、人员管理、实时显示、应急救援等效用的智慧监
一种高精度双轴太阳能自动 跟踪系统的设计 1 系统硬件结构 该设计主要由以下几个方面组成: MCU 控制电路、光电转换电路、实时时钟电路、电机驱动电路、电源电路以及键盘显示电路等,如图 1 所示。—35—低压电器( 2011No.16) ·分布式电源·图 1 系统结构框图系统主要实现时钟控制跟踪和光电跟踪混合式跟踪方法,阴天和夜晚系统不跟踪,并记录系统停止的时间。由三个光敏传感器一直采集光照强度,当光照强度达到系统要求时,根据时钟控制跟踪方法粗控制直流电机,直到太阳光斑达到一定围时再转为光电精确控制,采用遮挡光照的四象限方法。在一直天气晴朗的情况下,电机停止时间不超过30 min,可一直采用光电精确控制,当受光面与太阳光垂直时停止系统跟踪,且不断采集高度角和方位角的光电信号,信号差达到一定阈值时可再次启动系统跟踪。 1. 1 微控制器设计 系统主控芯片 MCU 采用 STC12C5206AD,窄体直插式封装 28 脚,23 个 I/O 端口。该芯片带有八路 8 bit 高速 A/D 转换通道,两路 PWM 输出,UART 串行通信,6 KB 片内 Flash 程序存储器及带有内部 E2PROM,支持在系统可编程和在应用可编程( ISP/IAP) 功能,比传统80C51 速度快到6 ~12 倍,价格低廉,完全能满足太阳跟踪装置的要求 单片机与外围电路连接如图 2 所示。 图 2 系统电路连接设计图 1. 2 时钟电路设计 时钟电路选择 DS1302,与 AT89C51 单片机接口采用三线( RST,SCLK 和 I/O) 连接,RST 提供了 31 Bytes 的非易失性 SRAM,用于数据存储;SCLK 保存系统时钟和日期。I / O 为时钟控制跟踪太阳做输入信号。电路连接如图 3 所示。该设计中,采用大容量电容蓄电,作为 DS1302 的后备电源,DS1302 的工作电压宽达 2. 5 ~5. 5 V。 1. 3 光电转换电路设计 光敏电阻采用 LXD5516D,具有高灵敏度、快速响应时间、低功耗、高性价比等特点。其中,亮电阻 5 ~10 kΩ,暗电阻 200 kΩ以上,亮电阻和光照强度的关系并不是完全的线性关系。采集电路设计如图 4 所示,调节电位器,使在亮电阻时输出电压在2 ~3 V,通过稳压后进行 A/D 转换。该设计共用七个光敏电阻,其中,A、B、C 三个光敏电阻安置在太阳跟踪装置的不同位置,用来判断阴天还是晴天,同时其他两对( E,W) ,( S,N) 光敏电阻分别用于判断方位角和高度角的光照精度,以便精确驱动电机运行。 图 3 时钟控制电路 图 4 光敏电阻采集电路 1. 4 其他部分电路设计 该设计采用直流电动机,通过驱动芯片 L298带动电机运行,驱动电路和内部系统电路采用光电隔离,具有高精度、低成本、电动机运行噪声低等优点。 键盘和显示部分采用 ZLG7290 智能控制芯片。该芯片具有 I 2 C 串行接口,可控制八个共阴极数码管显示和 64 个键盘。该部分在调试过程中作为人、机交互界面,调试成功后可以不使用,节省成本。 限位开关用来控制小型电动机的运行范围,减少因电动机的无谓转动而带来的电源损耗及机械磨损。 2 软件系统设计
综述 摘要:人体的运动分析主要指的是对场景中的运动个体或者群体进行运动检测、运动跟踪与理解以到达描述人体行为的目的。通过阅读文献,本文将从人体检测,人体跟踪和人群运动分析三个方面介绍人群特征分析的方法。 1.绪论 随着社会的发展,公共需求的提高,群体运动的分析越来越受关注。并且随着人口的增长,人群活动日益增加,相应的人群安全问题也越来越突出。对人群的分析研究分别在社会学、心理学、建筑学、计算机等各个学科受到极大的关注。人群分析主要分为以下五个方面。 (1)人群管理:对大型集会的人群管理,是公共安全管理领域中最亟待解决的问题。人群分析可以更好的发展人群管理策略,避免因人群拥挤而发生的灾难事件,确保人身安全。 (2)虚拟环境:通过构造人群的数学模型结构,在虚拟环境下来模拟人群场景,来丰富人的生活体验。如一些虚拟的聊天室、电影或者动画制作过程中的特效应用等。 (3)智能环境:在一些涉及到大型人群的智能环境下,人群分析可以预协调人群。如在博物馆,人群的模式决定了如何疏散人群。 (4)公共场所设计:人群分析可以为公共场所的设计提供指导,如对商场的人流估计,使得商场的布局更方便于顾客或者最可能有效的利用空间优化办公室场所。 (5)视觉监控:人群分析可以用来自动检测场景中的异常情况。而且,在人群中的个体跟踪有助于协助安防人员捕捉嫌疑犯。 虽然人群运动分析技术研究已取得了一定的成果,但是人群运动的复杂性以及实际运动场景的多变性仍然给人群运动分析带来很多的研究难点。目前在人群运动的自动检测与跟踪方面,也没有相对完善的理论基础,各向技术也处在完善阶段。主要表现在: (1)运动检测与分割:在人群运动分析系统中,如何对人群运动实现快速而准确的分割是极为重要的难题。由于视频序列中运动场景极易受到各种客观因素的影响,如光照变化、背景与前景的混杂干扰、运动目标与环境之间或者运动目标之间的遮挡现象等,使得对人群运动实现有效分割变的十分的困难。目前常用的运动分割算法如帧间差分法或背景相减法都难以适应复杂或者拥挤场景的运动分
数控机床各数控轴重复定位精度和反向间隙 一、重复定位精度 1、定义 重复定位精度是指机床滑板或大拖板在一定距离范围内(一般为200-300mm)往复运动7次千分表或激光干涉仪检测的精度。取这7次的最大差值。 2、影响因素 重复定位精度反映了伺服系统特性、进给系统的间隙与刚性以及摩擦特性等综合误差。一般情况下,重复定位精度是呈正态分布的偶然性误差,它影响一批零件加工的一致性,是一个非常重要的精度指标。它是影响机器能力指数CMK,工序能力指数CPK的重要因素。 3、相关标准 GB/T18400.4-2010 与ISO标准相当。300毫米长度上±0.0035 JIS 日本标准 DIN 德国标准 二、重复定位精度和定位精度的区别。 定位精度指的是数控轴实际到达的位置和数控系统要求到达的位置误差。比如要求一个轴走100 mm ,结果实际上它走了100.01 多出来的0.01 就是定位精度。 重复定位指的是同一个位置多次定位过去产生的误差。比如要求一个轴走100 mm 结果第一次实际上他走了100.01 重复一次同样的动作他走了99.99 这之间的误差0.02 就是重复定位精度。 通常情况重复定位精度比定位精度要高的多。 单件生产(比如模具制造)要求机床具有较高的定位精度,大批量生产要求机床具有较高的重复定位精度 三、重复定位精度的检测方法。 有两种,一种使用激光干涉仪,一种使用千分表。 介绍千分表检测重复定位精度。
1、选取数控轴经常使用的一段长度(200~300)毫米。 2、由作业指导员按下列要求编写一段小程序: 1)设定坐标轴的起点 2)坐标轴以工进速度(300米/分)往前走200或300毫米。 3)停住3秒。(便于观察千分表) 4)返回起点 5)重复上述步骤共七次。 程序如下:(以X 轴为例) G91 X0 G01 X300. F300 G04 X3. G01 X0 M99 3、作业指导员运行先单节运行小程序,确认程序无误。 4、保全工在停止的位置安装好千分表,并将千分表置零。 5、回到程序起点。 6、自动运行小程序,在暂停时观察百分表的度数并做好记录。 7、7次读数的最大差值即为该轴的重复定位精度。 四、重复定位误差超差处理对策: 1、当超差不大时如 0.02/300,可用激光干涉仪自带的软件对数控系统进行补偿。 当超差较大,应进一步确认是伺服系统问题、机械间隙、刚性问题、机械阻力(发卡)问题,做出相应的对策。 五、坐标轴的综合反向间隙 (背隙)(静态反向间隙) 1、通俗地讲就是伺服电机正传后变换成反转的时候,在一定的角度内,尽管电机转动,但是各传动链还要等间隙消除(受力一侧的)以后才能带动工作台运动,这个间隙就是综合反向间隙。这个间隙是一个综合值, 它 反应了丝杠螺
万方数据
万方数据
万方数据
一种基于多传感器多目标跟踪数据的时间对准方法 作者:李政, 谭伟, 马红江, 杜营营, 陆百川, LI Zheng, TAN Wei, MA Hongjiang, DU Yingying, LU Baichuan 作者单位:重庆交通大学交通运输学院,重庆,400074 刊名: 交通信息与安全 英文刊名:COMPUTER AND COMMUNICATIONS 年,卷(期):2011,29(1) 被引用次数:1次 参考文献(10条) 1.梁凯;潘泉;宋国明多传感器时间对准方法的研究[期刊论文]-陕西科技大学学报(自然科学版) 2006(03) 2.严朝系统误差校正中的时间对准问题研究 2009(05) 3.罗素云AIS与雷达目标位置数据融合方法的研究[学位论文] 2003 4.张震龙不确定性推理与时空对准技术研究[学位论文] 2005 5.Baichuan L U;Meiling H Traffic flow predict-ion based on wavelet analysis,genetic algorithm and artificial neural network Proceedings 2009 6.夏伟;李朝辉;常春藤MATLAB控制系统仿真与实例详解 2008 7.Jun M A;Li Xiaodong;Meng Ying Research of urban traffic flow forecasting based on neural network [期刊论文]-Acta Electronica Sinica 2009(05) 8.郝勇;范君晖系统工程方法与应用 2007 9.陈杰MATLAB宝典 2006 10.Shen Ying;Xue An-ke;WANG Rui-rong Application of curve-fitting in evaluation for information fusion system[期刊论文]-Journal of Hangzhou Institute of Electronic Engineering 2005(02) 本文读者也读过(10条) 1.魏武.张起森.黄心汉.WEI Wu.ZHANG Qi-sen.HUANG Xin-han一种基于多传感器的交通监控系统智能接口[期刊论文]-长沙交通学院学报2000,16(3) 2.李兆展.林艳红.李若仲.Li Zhaozhan.Lin Yanhong.Li Ruozhong制导雷达组网多站数据的时间对准问题研究[期刊论文]-战术导弹技术2010(1) 3.万琦AIS在广州交管系统中的应用分析[会议论文]-2002 4.李云.郝钢.张玉茹.LI Yun.HAO Gang.ZHANG Yu-ru自校正分布式观测融合Kalman估值器[期刊论文]-哈尔滨商业大学学报(自然科学版)2011,27(1) 5.李政.谭伟.马红江.杜营营.陆百川一种基于多传感器多目标跟踪数据的时间对准方法[会议论文]-2010 6.刘利频.温慧英.徐建闽.Liu Lipin.Wen Huiying.Xu Jianmin多类型传感器实时交通数据采集和车型自动分类系统设计[期刊论文]-交通与计算机2005,23(1) 7.孙为民.周永丰.Sun Weimin.Zhou Yongfeng时间对准误差分析实验[期刊论文]-舰船电子工程2006,26(3) 8.郝钢.叶秀芬.HAO Gang.YE Xiu-fen多传感器加权观测融合自适应UKF滤波器[期刊论文]-宇航学报2011,32(6) 9.杜磊.王党卫.姚迪多源目标数据融合方法设计与实现[期刊论文]-科技信息2011(13) 10.李莉.LI Li时间配准在多传感器数据处理中的应用[期刊论文]-仪器仪表用户2011,18(3) 引证文献(1条) 1.斯海林.李标.邓天民城市3D GIS实景采集中多传感器的时空配准研究[期刊论文]-公路与汽运 2013(4)
第2期(总第147期 2008年4月机械工程与自动化 M ECHAN I CAL EN G I N EER I N G &AU TOM A T I ON N o 12 A p r 1 文章编号:167226413(20080220140203 太阳自动跟踪装置控制系统的研究 徐东亮,任超 (武汉理工大学机电学院,湖北武汉430070 摘要:为了更充分、高效地利用太阳能,人们普遍采用跟踪太阳的方式以最大限度地获得更多的光能。介绍了太阳自动跟踪装置控制系统的控制原理及硬件、软件的设计方法。该系统控制软件运行后,PC 机通过串行端口发送和接收脉冲信号以驱动步进电机,实现对太阳运动轨迹的自动跟踪。整个系统结构简单、价格低廉、性能可靠、跟踪精度高。本控制系统基于PC ,具有丰富的软件资源、良好的人机界面以及强大的数据处理能力。关键词:太阳跟踪装置;自动控制;串口通讯;步进电机中图分类号:T P 273文献标识码:A 收稿日期:2007208213;修回日期:2007211201 作者简介:徐东亮(19702,男,福建人,副教授,博士,研究方向为机械电子工程、检测技术与自动化装置。 0引言 太阳能是一种洁净的可再生资源,有着矿物能源不可比拟的优越性,而且太阳能资源十分丰富,是目前可再生能源中应用范围最广泛、发展前景最远大的清洁能源。
虽然太阳能总能量很大,但由于太阳能的能量密 度比较低,在大气层外的平均密度约为1135k W m 2 ,再考虑通过大气层的损耗等因素,当到达地面时,只 有不到1k W m 2 。因此为了更充分、高效地利用太阳能,人们普遍采用跟踪太阳的方式以最大限度地获得更多的光能。本文介绍的是基于二维太阳跟踪装置的控制系统,该系统采用视日运动轨迹跟踪的方法计算太阳的高度角和方位角,进而通过PC 控制步进电机,实现全自动、全天候、高精度的太阳跟踪。由于采用在V C ++610环境下通过PC 机串口直接控制步进电机的方法,因此整个系统成本低、简单实用、可靠性高,且具有良好的人机界面,能够广泛应用于气象监测、环境能源利用等领域。1太阳运行轨迹的算法 太阳的运行轨迹,即太阳相对地球的位置可由两种坐标系来描述:赤道坐标系和地平坐标系。111赤道坐标系 赤道坐标系是人在地球以外的宇宙空间里看太阳相对于地球的位置,这时太阳相对于地球的位置是相对于赤道平面而言,用赤纬角和时角这两个坐标表示。11111赤纬角? 太阳中心与地球中心的连线(即太阳光线在地球表面直射点与地球中心的连线与此连线在赤道平面上的 投影间的夹角称为太阳赤纬角(或称太阳赤纬。它描述地球以一定的倾斜度绕太阳公转而引起二者相对位置的变化。一年中,太阳光线在地球表面上的垂直照射点的位置在南回归线、赤道和北回归线之间往复运动,使该直射点与地心连线在赤道面上的夹角也随之重复变化。赤纬角?(o 在一年中的变化用下式计算: ?=23145sin (2Πd
野生动物跟踪技术的研究综述 摘要:随着野生动物研究工作发展的深入,在科学技术大发展的今天,野生动物跟踪技术也在飞速的发展着。无线电跟踪技术、电子标志技术、基于手机SIM卡的新型跟踪技术以及全球定位系统的应用,都大放异彩,极大地推动了野生动物研究工作的发展。本篇综述主要就对国内外各种野生动物跟踪技术的发展现状进行研究和分析,并对未来野生动物跟踪技术的发展方向和发展前景指明方向。 关键词:野生动物跟踪技术卫星跟踪技术无线电技术射频识别(RFID)技术引言:人类对野生动物的研究自古已有,甚至可以说人类的进步和发展在很大的程度上得益于向大自然学习,向大自然中的各种生物学习。在日常生活中仿生技术的广泛应用就足以说明这一点。。植物和动物在几百万年的自然进化当中不仅完全适应自然而且其程度接近完美。仿生学试图在技术方面模仿动物和植物在自然中的功能。这个思想在生物学和技术之间架起了一座桥梁,并且对解决技术难题提供了帮助。通过再现生物学的原理,人类不仅找到了技术上的解决方案,而且同时该方案也完全适应了自然的需要。仿生学的目的就是分析生物过程和结构以及它们的分析用于未来的设计。仿生学的思想是建立在自然进化和共同进化的基础上的。人类所从事的技术就是使得达到最优化和互相间的协调。而研究野生动物无疑是一个绝佳的机会。然而,野生动物的研究并不容易,其实地研究的最大难点就在于发现它们和对它们进行跟踪观察。高科技手段的运用是突破这一难点的根本途径,也是动物学家们的梦想和奢望。在科学技术飞速发展的今天,野生动物跟踪技术也取得了长足的发展,野生动物研究工作成果显著! 几种主要的野生动物跟踪技术 无线电跟踪技术 美国是野生动物无线电跟踪技术的主要发源地,同时也保持着这一技术应用的最高水平。美国野生动物无线电跟踪设备和跟踪技术的设计与研究状况,直接影响着世界野生动物无线电跟踪技术发展与动向。美国野生动物无线电跟踪设备与技术在经历了近40年的发展与变化的今天已经凝固有了长足的进步。表现在:野生动物的无线电跟踪设备在不断翻新、应用反胃不断扩大、精度不断提高,应用技术也在不断向前发展。 野生动物无线电跟踪设备主要由两部分组成,即无线电发射部分和无线电接收部分。无线电发射部分是由发射机、发射天线和发射机固定装置三部分组成。无线电接收部分有是有接收机、接收天线两部分组成。野生动物无线电跟踪设备自50年代发明至今,其发射部分和接受部分都有较大发展。就发射机而言,发射机的发展变化有以下一些特点:一、体积更小和重量更轻。 二、根据不同用途,开发出了体内嵌入式、体外外挂式和粘贴式几类。 三、发射机内安装了温度感受器,因而可以将动物体温的变化情况发射出来。四、为减少捕抓动物次数,可控制自动脱落式颈圈已制造出来。 五、为提高动物定位的准确性,在发射机上还安装了GPS定位装置。可将GPS定位信息暂时贮存于发射机中,待颈圈回收后,将GPS信息直接输入计算机,形成动物活动路线图。 卫星跟踪技术 卫星跟踪技术既是全球卫星定位系统的应用。全球卫星定位系统(Globle Positioning System) 是一种结合卫星及通讯发展的技术,利用导航卫星进行测时和测距。全球卫星定位系统(简称GPS) 是美国从本世纪70 年代开始研制,历时20 余年,耗资200 亿美元,于1994 年全面建成。具有海陆空全方位实时三维导航与定位能力的新一代卫星导航与定位系统。经过近十年我国测绘等部门的使用表明,全球卫星定位系统以全天候、高精度、自动化、高效益等
计算机在生物学和医学的应用28(1998)415-421 人工和工业机器人重复操作定位精度比较 Jure Zupancic*, Tadej Bajd 卢布尔雅那大学电气工程学院,Trz?as?ka 25, SI-1000 卢布尔雅那,斯洛文尼亚 1997年12月8日 摘要机器人重复定位精度性能所受的影响。操作机器人的重量-有效载荷的比例要明显的高于人工操作。支撑的使用提高了机器人的上述性能。这个策略模仿了人工操作时的动作。将机器人和操作人员在相同的条件下操作做一次比较。通过OPTOTRAK?运动分析系统完成了非接触式重复定位精度测量的测试。实验结果表明机器人和操作人员的定位精度在使用支撑后得到了相当大的改善。 ?1998年,艾斯维尔科技有限公司保留所有权利。 关键词工业机器人,人为操作的重复性,标准,测量,支撑战略 1介绍 现代机器人中代替操作人员执行装配任务的机械手通常是按照人类的胳膊和手 来设计的。机械对应人工操作发展的主要目标是实现功能改善,如提高速度,增加有效载荷能力,提高定位精度和可重复性。然而,当负载不超过3公斤时,经评估发现机器人的重量—有效载荷比是人类在相同操作情况下的10倍以上。从技术和经济的角度来看这个比例的减少与机器人的效率密切相关。提高这个比率的传统原则是引入更轻的材料,创建一个新的结构,设计新的执行器。 在特殊情况下,使用适当的支撑体能够增加机器人的绝对精度和可重复性。支撑的方法是模仿人类在精细运动操作时的行为,以便能适应更高的精度和可重复性要求的需要。操作员在进行精确的操作任务时往往会像工作时的钟表匠一样为他的前臂,手腕处,肘关节等找一支撑体。同样道理也可以用在机器人身上。 除了一些估计,在人工和机器人的表现之间并没有明确的比较。这次研究的目的是为了是机器人和人工操作者在有支撑和没有支撑的条件下作一个操作技术的比较。 2方法 工业操作机器人的重复定位精度测试按照ISO 9283的标准进行测试。多维数据集
数控机床定位精度检测的七种方式 数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,南京第四机床有限公司通过信息载体输入数控装置。经运算处理由数控装置发出各种控制信号,控制机床的动作,按图纸要求的形状和尺寸,自动地将零件加工出来。 1、直线运动定位精度检测 直线运动定位精度一般都在机床和工作台空载条件下进行。按国家标准和国际标准化组织的规定(ISO标准),对数控机床的检测,应以激光测量为准。在没有激光干涉仪的情况下,对于一般用户来说也可以用标准刻度尺,配以光学读数显微镜进行比较测量。但是,测量仪器精度必须比被测的精度高1~2个等级。 为了反映出多次定位中的全部误差,ISO标准规定每一个定位点按五次测量数据算平均值和散差-3散差带构成的定位点散差带。 2、直线运动重复定位精度检测 检测用的仪器与检测定位精度所用的相同。一般检测方法是在靠近各坐标行程中点及两端的任意三个位置进行测量,每个位置用快速移动定位,在相同条件下重复7次定位,测出停止位置数值并求出读数最大差值。以三个位置中最大一个差值的二分之一,附上正负符号,作为该坐标的重复定位精度,它是反映轴运动精度稳定性的最基本指标。 3、直线运动的原点返回精度检测 4、直线运动的反向误差检测 直线运动的反向误差,也叫失动量,它包括该坐标轴进给传动链上驱动部位(如伺服电动机、伺趿液压马达和步进电动机等)的反向死区,各机械运动
传动副的反向间隙和弹性变形等误差的综合反映。误差越大,则定位精度和重复定位精度也越低。 反向误差的检测方法是在所测坐标轴的行程内,预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差。在靠近行程的中点及两端的三个位置分别进行多次测定(一般为7次),求出各个位置上的平均值,以所得平均值中的最大值为反向误差值。 5、回转工作台的定位精度检测 测量工具有标准转台、角度多面体、圆光栅及平行光管(准直仪)等,可根据具体情况选用。测量方法是使工作台正向(或反向)转一个角度并停止、锁紧、定位,以此位置作为基准,然后向同方向快速转动工作台,每隔30锁紧定位,进行测量。正向转和反向转各测量一周,各定位位置的实际转角与理论值(指令值)之差的最大值为分度误差。如果是数控回转工作台,应以每30为一个目标位置,对于每个目标位置从正、反两个方向进行快速定位7次,实际达到位置与目标位置之差即位置偏差,再按GB10931-89《数字控制机床位置精度的评定方法》规定的方法计算出平均位置偏差和标准偏差,所有平均位置偏差与标准偏差的最大值和与所有平均位置偏差与标准偏差的最小值的和之差值,就是数控回转工作台的定位精度误差。 考虑干式变压器到实际使用要求,一般对 0、90、 180、270等几个直角等分点进行重点测量,要求这些点的精度较其他角度位置提高一个等级。 6、回转工作台的重复分度精度检测 7、回转工作台的原点复归精度检测