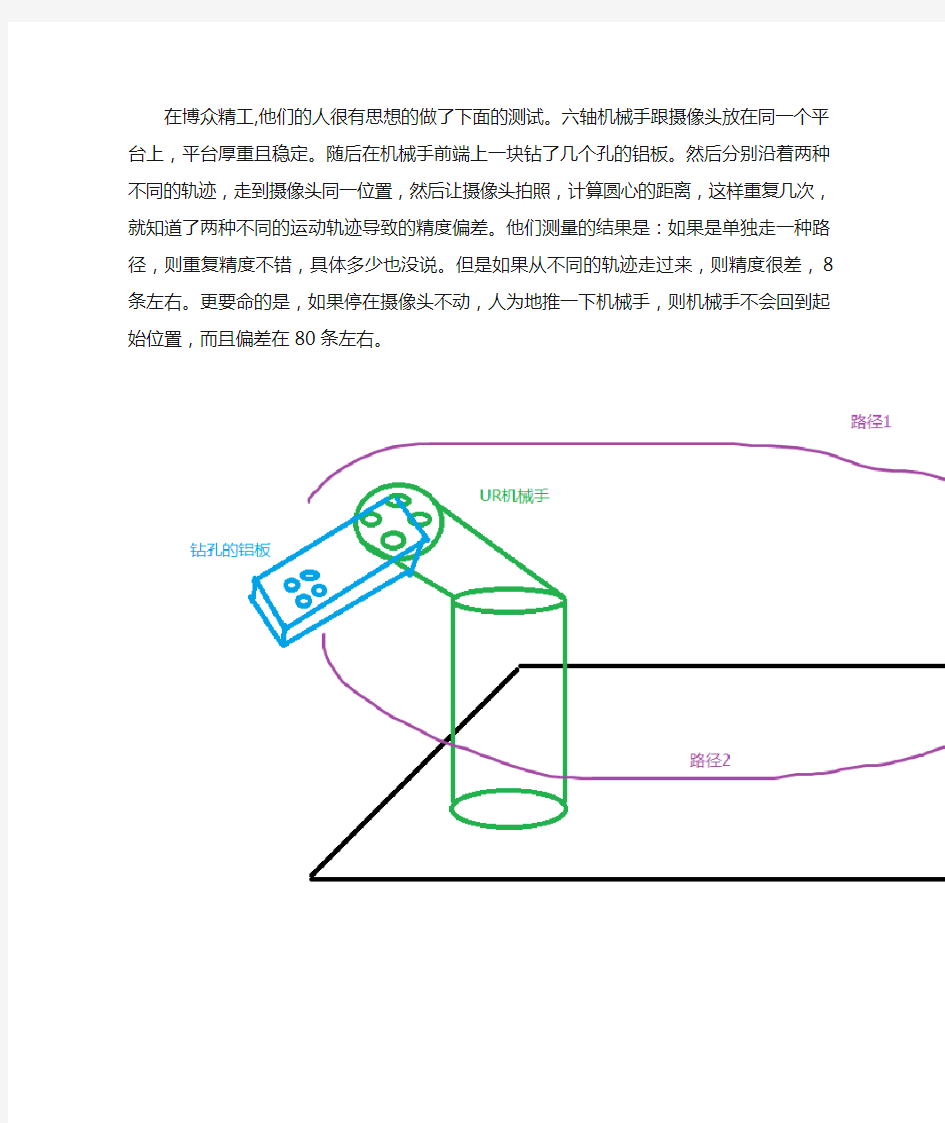
在博众精工,他们的人很有思想的做了下面的测试。六轴机械手跟摄像头放在同一个平台上,平台厚重且稳定。随后在机械手前端上一块钻了几个孔的铝板。然后分别沿着两种不同的轨迹,走到摄像头同一位置,然后让摄像头拍照,计算圆心的距离,这样重复几次,就知道了两种不同的运动轨迹导致的精度偏差。他们测量的结果是:如果是单独走一种路径,则重复精度不错,具体多少也没说。但是如果从不同的轨迹走过来,则精度很差,8条左右。更要命的是,如果停在摄像头不动,人为地推一下机械手,则机械手不会回到起始位置,而且偏差在80条左右。
张小只智能机械工业网 张小只机械知识库工业机器人的重复定位精度是如何测量的 重复定位精度是工业机器人最重要的性能指标之一。位置重复性是工业机器人制造商指定的唯一的定位性能指标,在他们的宣传册上有0.010 毫米和0.100 毫米之间变化。然而,计量从此发生了改变,到底如何测量位置重复性的大小? 如果你幸运的话,像我们先进的计量设备有很多,你可以使用激光干涉仪。后者是非常准确的(0.001 毫米测量不确定度),但价格昂贵(约50000美元),难以建立措施在同一时间只有一个坐标。你也可以使用CMM,但这显然是不现实的。你可以 使用各种类型的三维测量设备,但某些工业机器人制造商使用激光跟踪仪因为他们已经使用一些机器人标定激光跟踪仪。所以我们到底应不应该应该相信工业机器人厂商提供的重复数据? 一个基本的方法在ISO/TR 13309:1995提出依托三个正交使用位置传感器的安装。我最近买了一个这样的装置:三一探针IBS精密工程。后者是无线的,轻便小巧,而且不贵(约15000美元)。其测量不确定度约为0.001 mm,其测量范围是3.5 毫米。不幸的是,它采用电涡流传感器需要特殊基准球,成本超过500美元每安装在纤细的茎而且很容易打破。 一个非常重要的,我们的三维探测新的组件标定板。后者本质上是以三球的原理在三V形槽的运动平台。在测试我们的三维探头在发那科LR伴侣200iC的工业机器人(借给我们的通用航空)和ABB IRB 120机器人时,我们使用一个定制的枢接座三0.5″基准球,每一对分开约300毫米。使用非常简单的matlab代码,我们可以从每一个数字指标获取位置数据并发送到机器人控制器通过以太网。每个机器人的控制器,然后运行一个程序,执行自动测试。这个测试程序如下。
定位精度、重复定位精度的概念以及国家相关标准 许多人经常听到定位精度和重复定位精度的说法但却对它们的概念以及检测方法很模糊本文将阐明其概念并就给出国家标准GB/T 17421.2-2000等同于国际ISO230-21997---数控轴线的定位精度和重复定位精度的确定。GB/T 17421.2-2000 数控轴线的定位精度和重复定位精度的确定 1. 范围本标准规定了通过直接测量机床的单独轴线来检验和评定数控机床的定位精度和重复定位精度的方法。这种方法对直线运动和回转运动同样适用。本标准适用机床的型式检验验收检验比较检验定期检验也可用于机床的补偿调整检验。本标准不适用于需同时检验几个轴线的机床。 2. 定义和符号本标准采用以下定义和符号 2.1. 轴线行程在数字控制下运动部件沿轴线移动的最大直线行程或绕轴线回转的最大行程。 2.2. 测量行程用于采集数据的部分轴线行程。选择测量行程时应保证可以双向趋近第一个和最后一个目标位置。 2.3. 目标位置i 1 至m 运动部件编程要达到的位置。下标i表示沿轴线或绕轴线选择的目标位置中的特定位置。 2.4. 实际位置Piji 1 至mj 1 至n 运行部件第j次向第i个目标位置趋近时实际测得的到达位置。 2.5. 位置偏差Xij 运动部件到达的实际位置减去目标位置之差。Xij Pij Pi 2.6. 单向以相同的方向沿轴线或绕轴线趋近目标位置的一系列测量。符号↑表示从正方向趋近所得的参数符号↓表示从负方向趋近所得的参数。 2.7. 双向从两个方向沿线轴线或绕轴线趋近某目标位置的一系列测量所测得的参数。 2.8. 扩展不确定度定量地确定一个测量结果的区间该区间期望包含大部分的数值分布。 2.9. 覆盖因子为获得扩展不确定度而用标准不确定度倍率的一个数值因子。 2.10. 某一位置的单向平均位置偏差由n次单向趋近某一位置Pi所得的位置偏差的算术平均值。 2.11. 某一位置的双向平均位置偏差从两个方向趋近某一位置Pi所得的单向平均位置偏差 2.12. 某一位置的反向差值Bi 从两个方向趋近某一位置时两单向平均位置偏差之差。2.1 3. 轴线反向差值B 沿轴线或绕轴线的各个目标位置的反向差值的绝对值Bi中的最大值。 2.14. 轴线平均反向差值B 沿轴线或绕轴线的各个目标位置反向差值Bi的算术平均值。 2.15. 在某一位置的单向定位标准不确定度的估算值Si↑或Si↓ 通过对某一位置Pi的n次单向趋近所得获得的位置偏差标准不确定度的估算值。 2.16. 某一位置的单向重复定位精度Ri↑或Ri↓ 由某一位置Pi的单向位置偏差的扩展不确定度确定的范围覆盖因子为 2.18. 轴线单向重复定位精度R↑或R↓以及轴线双向重复定位精度R 沿轴线或绕轴线的任一位置Pi的重复定位精度的最大值。 2.19. 轴线单向定位系统偏差E↑或E↓ 沿轴线或绕轴线的任一位置Pi上单向趋近的单向平均位置偏差的最大值与最小值的代数差。 2.20. 轴线双向定位系统偏差E 沿轴线或绕轴线的任一位置Pi上双向趋近的单向平均位置差的最大值与最小值的代数差。 2.21. 轴线双向平均位置偏差M 沿轴线或绕轴线的任一位置Pi的双向平均位置偏差的最大值与最小值的代数差。
数控机床各数控轴重复定位精度和反向间隙 一、重复定位精度 1、定义 重复定位精度是指机床滑板或大拖板在一定距离范围内(一般为200-300mm)往复运动7次千分表或激光干涉仪检测的精度。取这7次的最大差值。 2、影响因素 重复定位精度反映了伺服系统特性、进给系统的间隙与刚性以及摩擦特性等综合误差。一般情况下,重复定位精度是呈正态分布的偶然性误差,它影响一批零件加工的一致性,是一个非常重要的精度指标。它是影响机器能力指数CMK,工序能力指数CPK的重要因素。 3、相关标准 GB/T18400.4-2010 与ISO标准相当。300毫米长度上±0.0035 JIS 日本标准 DIN 德国标准 二、重复定位精度和定位精度的区别。 定位精度指的是数控轴实际到达的位置和数控系统要求到达的位置误差。比如要求一个轴走100 mm ,结果实际上它走了100.01 多出来的0.01 就是定位精度。 重复定位指的是同一个位置多次定位过去产生的误差。比如要求一个轴走100 mm 结果第一次实际上他走了100.01 重复一次同样的动作他走了99.99 这之间的误差0.02 就是重复定位精度。 通常情况重复定位精度比定位精度要高的多。 单件生产(比如模具制造)要求机床具有较高的定位精度,大批量生产要求机床具有较高的重复定位精度 三、重复定位精度的检测方法。 有两种,一种使用激光干涉仪,一种使用千分表。 介绍千分表检测重复定位精度。
1、选取数控轴经常使用的一段长度(200~300)毫米。 2、由作业指导员按下列要求编写一段小程序: 1)设定坐标轴的起点 2)坐标轴以工进速度(300米/分)往前走200或300毫米。 3)停住3秒。(便于观察千分表) 4)返回起点 5)重复上述步骤共七次。 程序如下:(以X 轴为例) G91 X0 G01 X300. F300 G04 X3. G01 X0 M99 3、作业指导员运行先单节运行小程序,确认程序无误。 4、保全工在停止的位置安装好千分表,并将千分表置零。 5、回到程序起点。 6、自动运行小程序,在暂停时观察百分表的度数并做好记录。 7、7次读数的最大差值即为该轴的重复定位精度。 四、重复定位误差超差处理对策: 1、当超差不大时如 0.02/300,可用激光干涉仪自带的软件对数控系统进行补偿。 当超差较大,应进一步确认是伺服系统问题、机械间隙、刚性问题、机械阻力(发卡)问题,做出相应的对策。 五、坐标轴的综合反向间隙 (背隙)(静态反向间隙) 1、通俗地讲就是伺服电机正传后变换成反转的时候,在一定的角度内,尽管电机转动,但是各传动链还要等间隙消除(受力一侧的)以后才能带动工作台运动,这个间隙就是综合反向间隙。这个间隙是一个综合值, 它 反应了丝杠螺
计算机在生物学和医学的应用28(1998)415-421 人工和工业机器人重复操作定位精度比较 Jure Zupancic*, Tadej Bajd 卢布尔雅那大学电气工程学院,Trz?as?ka 25, SI-1000 卢布尔雅那,斯洛文尼亚 1997年12月8日 摘要机器人重复定位精度性能所受的影响。操作机器人的重量-有效载荷的比例要明显的高于人工操作。支撑的使用提高了机器人的上述性能。这个策略模仿了人工操作时的动作。将机器人和操作人员在相同的条件下操作做一次比较。通过OPTOTRAK?运动分析系统完成了非接触式重复定位精度测量的测试。实验结果表明机器人和操作人员的定位精度在使用支撑后得到了相当大的改善。 ?1998年,艾斯维尔科技有限公司保留所有权利。 关键词工业机器人,人为操作的重复性,标准,测量,支撑战略 1介绍 现代机器人中代替操作人员执行装配任务的机械手通常是按照人类的胳膊和手 来设计的。机械对应人工操作发展的主要目标是实现功能改善,如提高速度,增加有效载荷能力,提高定位精度和可重复性。然而,当负载不超过3公斤时,经评估发现机器人的重量—有效载荷比是人类在相同操作情况下的10倍以上。从技术和经济的角度来看这个比例的减少与机器人的效率密切相关。提高这个比率的传统原则是引入更轻的材料,创建一个新的结构,设计新的执行器。 在特殊情况下,使用适当的支撑体能够增加机器人的绝对精度和可重复性。支撑的方法是模仿人类在精细运动操作时的行为,以便能适应更高的精度和可重复性要求的需要。操作员在进行精确的操作任务时往往会像工作时的钟表匠一样为他的前臂,手腕处,肘关节等找一支撑体。同样道理也可以用在机器人身上。 除了一些估计,在人工和机器人的表现之间并没有明确的比较。这次研究的目的是为了是机器人和人工操作者在有支撑和没有支撑的条件下作一个操作技术的比较。 2方法 工业操作机器人的重复定位精度测试按照ISO 9283的标准进行测试。多维数据集
数控机床定位精度检测的七种方式 数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,南京第四机床有限公司通过信息载体输入数控装置。经运算处理由数控装置发出各种控制信号,控制机床的动作,按图纸要求的形状和尺寸,自动地将零件加工出来。 1、直线运动定位精度检测 直线运动定位精度一般都在机床和工作台空载条件下进行。按国家标准和国际标准化组织的规定(ISO标准),对数控机床的检测,应以激光测量为准。在没有激光干涉仪的情况下,对于一般用户来说也可以用标准刻度尺,配以光学读数显微镜进行比较测量。但是,测量仪器精度必须比被测的精度高1~2个等级。 为了反映出多次定位中的全部误差,ISO标准规定每一个定位点按五次测量数据算平均值和散差-3散差带构成的定位点散差带。 2、直线运动重复定位精度检测 检测用的仪器与检测定位精度所用的相同。一般检测方法是在靠近各坐标行程中点及两端的任意三个位置进行测量,每个位置用快速移动定位,在相同条件下重复7次定位,测出停止位置数值并求出读数最大差值。以三个位置中最大一个差值的二分之一,附上正负符号,作为该坐标的重复定位精度,它是反映轴运动精度稳定性的最基本指标。 3、直线运动的原点返回精度检测 4、直线运动的反向误差检测 直线运动的反向误差,也叫失动量,它包括该坐标轴进给传动链上驱动部位(如伺服电动机、伺趿液压马达和步进电动机等)的反向死区,各机械运动
传动副的反向间隙和弹性变形等误差的综合反映。误差越大,则定位精度和重复定位精度也越低。 反向误差的检测方法是在所测坐标轴的行程内,预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差。在靠近行程的中点及两端的三个位置分别进行多次测定(一般为7次),求出各个位置上的平均值,以所得平均值中的最大值为反向误差值。 5、回转工作台的定位精度检测 测量工具有标准转台、角度多面体、圆光栅及平行光管(准直仪)等,可根据具体情况选用。测量方法是使工作台正向(或反向)转一个角度并停止、锁紧、定位,以此位置作为基准,然后向同方向快速转动工作台,每隔30锁紧定位,进行测量。正向转和反向转各测量一周,各定位位置的实际转角与理论值(指令值)之差的最大值为分度误差。如果是数控回转工作台,应以每30为一个目标位置,对于每个目标位置从正、反两个方向进行快速定位7次,实际达到位置与目标位置之差即位置偏差,再按GB10931-89《数字控制机床位置精度的评定方法》规定的方法计算出平均位置偏差和标准偏差,所有平均位置偏差与标准偏差的最大值和与所有平均位置偏差与标准偏差的最小值的和之差值,就是数控回转工作台的定位精度误差。 考虑干式变压器到实际使用要求,一般对 0、90、 180、270等几个直角等分点进行重点测量,要求这些点的精度较其他角度位置提高一个等级。 6、回转工作台的重复分度精度检测 7、回转工作台的原点复归精度检测