太空中因卫星相撞、火箭发射遗下的废弃物等都是被称作太空垃圾,而这些小碎片不像地球上垃圾仅会堵塞下水沟通道,太空垃圾更具威胁性,它们潜在地会撞击正在运行的太空飞船,并对宇航员构成生命威胁。
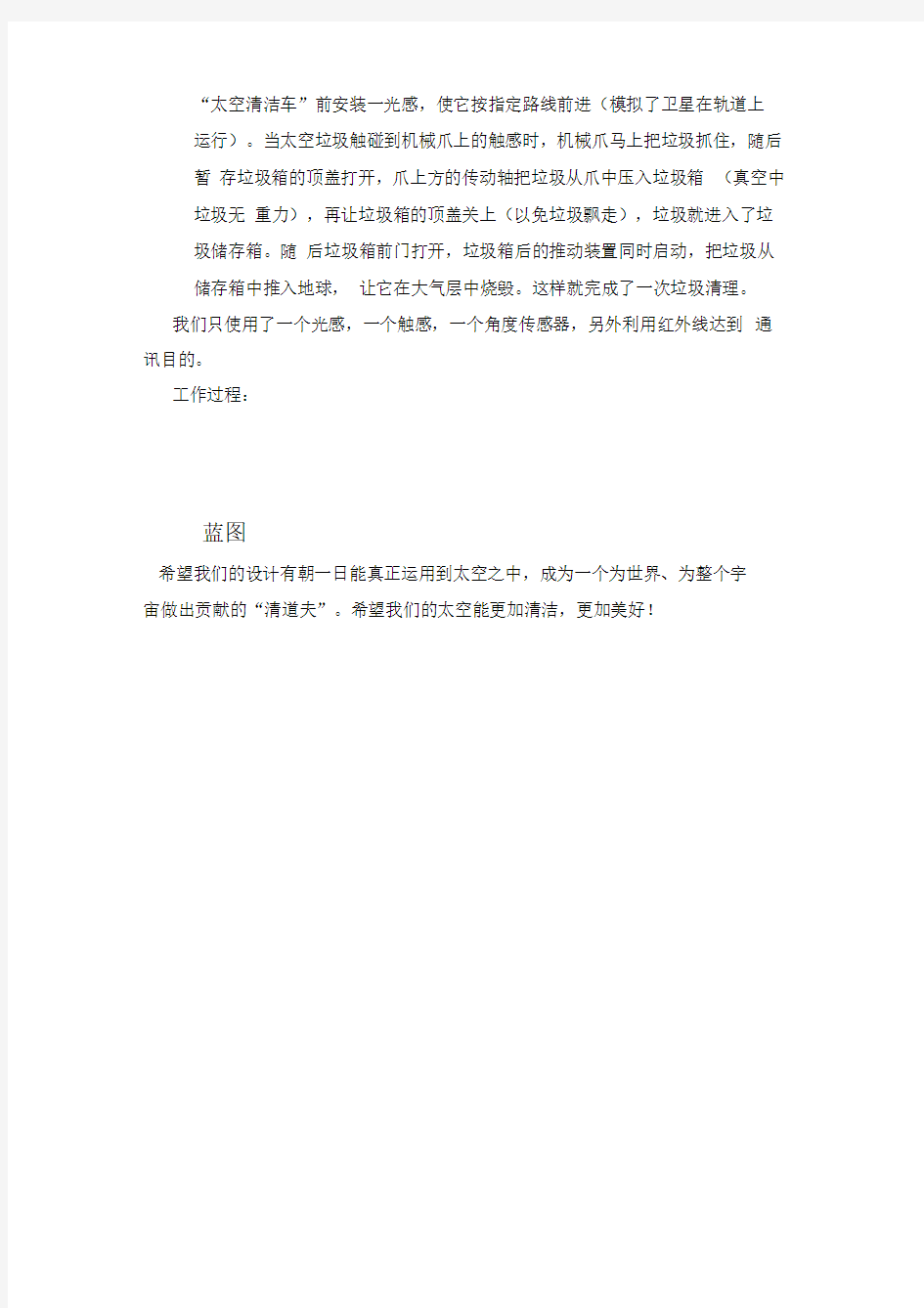
1996年法国“西雷斯”卫星被10年前法国火箭爆
破后的一块碎片击中。通常,太空飞船会利用其跟踪系
统所搜寻的信息躲避较大体积太空垃圾的碰撞,但是一
些小体积太空垃圾会定期地撞击航天飞机等宇
宙飞船。
(蓝色地球已被不计其数的“太
空垃圾”所包围)中国空间技术研究专家指出,随着航天活动越来越多,太空垃圾势必不断增多,卫星撞击事件为太空“交通安全”敲响了警钟。
为了防止这类事件再次发生,太空垃圾清理机器人是至关重要的,因此我们设计了在太空中进行垃圾清扫的“太空清洁车”。机器人在太空中沿着轨道绕着地球运行,在运转中收集垃圾并把它们推入大气层且燃烧。这样降低了太空垃圾对飞行器的潜在威胁,减少了损失。
机器人制作原理:
我们制作的机器人模拟了卫星在太空沿轨道运行,在地球的外围收集垃圾。为未来的太空安全做出保障。
“太空清洁车”前安装一光感,使它按指定路线前进(模拟了卫星在轨道上
运行)。当太空垃圾触碰到机械爪上的触感时,机械爪马上把垃圾抓住,随后暂存垃圾箱的顶盖打开,爪上方的传动轴把垃圾从爪中压入垃圾箱(真空中垃圾无重力),再让垃圾箱的顶盖关上(以免垃圾飘走),垃圾就进入了垃圾储存箱。随后垃圾箱前门打开,垃圾箱后的推动装置同时启动,把垃圾从储存箱中推入地球,让它在大气层中烧毁。这样就完成了一次垃圾清理。
我们只使用了一个光感,一个触感,一个角度传感器,另外利用红外线达到通讯目的。
工作过程:
蓝图
希望我们的设计有朝一日能真正运用到太空之中,成为一个为世界、为整个宇
宙做出贡献的“清道夫”。希望我们的太空能更加清洁,更加美好!
专业课程设计说明书 题目:水面垃圾清理机器的设计 指导教师:何韶君 班级:机械设计制造及其自动化专业142班设计者:杨威威 学号:2014031224 校院:大连民族大学机电工程学院
目录 专业课程设计说明书 (1) 一.摘要 (2) 二.Abstract (3) 三.引言 (4) 四.机器人结构设计 (4) 四.1 整体结构设计理念 (4) 四.2 整体结构设计 (5) 四.3 垃圾收集装置设计 (6) 四.4 垃圾辅助收集装置设计 (7) 五.船重和排水量的计算 (7) 六.最大吃水深度的计算 (8) 七.动力装置设计 (8) 八.硬件设计 (10) 八.1系统总体设计 (10) 八.2电源模块 (11) 八.3电机驱动模块 (11) 八.4无线传输模块 (12) 八.5继电器模块 (12) 八.6主程序设计 (13) 九.影像收集系统设计 (13) 十.工作参数,待机和工作时长 (14) 十一. 垃圾收集特性及参数 (14) 十二.外观特性 (15) 十三. 控制方式 (15) 十四. 成本报告 (15) 十六. 市场分析 (19) 十六.1 市场推广 (19) 十六.2 盈利模式 (20) 结束语 (20) 参考文献: (20) 一.摘要 本文为解决现如今小型封闭水面垃圾清理耗费人力物力等问题,设计制作了一款由人工辅助远程遥控进行水面垃圾清理的机器人。水面垃圾打捞船针对水面环境污染的问题,主要致力于中小型湖泊河流等水域的固体垃圾清理,如塑料袋、饮料瓶,树枝树叶以及其它易清理的水面垃圾。实现水面垃圾清理的机械化与自动化,整个打捞过程无需人工直接参与,安全性非常好,效率大约是人工打捞的几十倍,水面越大、距离越远效果越显著。本文主要对水面垃圾自动打捞船进行了船体结构、动力装置、打捞及传输装置、垃圾存储装置以及其他零部件的设计、计算及校核等。分析了水面垃圾自动打捞船需要实现的功能要求,
水上垃圾清理装置 1 论文摘要 1.1中文摘要 摘要 随着我国现代化进程的加快、垃圾产生量的增加,水上漂浮垃圾的数量也日益增多,而现有人工清理方式不仅效率低下,而且带有一定的危险性。鉴于此,我们设计了这个水上垃圾清理装臵,以实现对漂浮垃圾环保、高效的收集。【关键词】垃圾收集清理环保节能
目录 1 论文摘要 (1) 1.1 中文摘要 (1) 1 引语 (1) 2 作品简介 (1) 3 作品分类 (1) 4 设计目的 (1) 5 设计基本思路 (1) 6 作品原理简介 (1) 7 作品模型图片及照片 (1) 8 使用说明 (3) 9 作品主要创新点 (3) 10 作品可行性 (4) 11 技术特点优势分析 (4) 12 适应范围 (5) 13 市场分析 (5) 14 经济效益预测 (5) 15 推广价值 (5) 16 结束语 (7)
1 引语 自古中华民族就以秀丽的山河文明于世,而在改革开放三十多年之后,我们要以更加美好的景色欢迎世界各地的友人。但随着现代化的加快,我们看到的却已不是美丽的山河,而是工业文明所导致的环境污染,以及由此所引发的种种疾病,灾难。有鉴于此,我们设计了这个水上垃圾清理装臵,希望以此为祖国环境保护尽自己的绵薄之力。 2作品简介 本作品利用船只自身行进过程与水面的相对运动,带动垃圾收集器工作,达到收集清理水面漂浮垃圾的目的。广泛适用于河面,湖面,海面等垃圾比较多的区域。具有环保、无污染、收集效率高、操作简单、成本低廉等特点。 3作品分类 机械控制与能源化工类 4设计目的 本作品是专为清理河流湖泊及海面上的漂浮垃圾而设计的。机械化的设计不仅无需外加动力,美观的外形也成为水上一道靓丽的风景线,亦可起到宣传环保意识的作用。 5设计基本思路 河流湖泊漂浮垃圾多,人工清理费时费力。本作品主要利用船只作为收集清理载体,配合本作品加以简单改装,即可实现利用船只的闲余能源清理漂浮垃圾的目的。 6作品原理简介 船只前进过程中,水流的冲击力使位于船只后方的叶轮转动,叶轮带动传送带的转动。传送带上的传送收集袋在随传送带转动的过程中把位于收集口后方的垃圾收集起来。随着传送带的转动,传送收集袋运动至后方的收集器上方,并随传送带转动,将垃圾倒入收集器中。此收集过程往复循环。 7作品模型图片及照片
说明书摘要 本发明公开了一种水面漂浮垃圾清理机,机架(15)固定于浮动平台(14)上,浮动平台(14)穿插于四根立柱(3)中,从而限制其水平移动和转动,清理机随水位高低自动升沉调整到最佳工作位置;水流驱动水轮运转,为清理机提供动力,处于缓流或静水区,驱动补偿电机(6)作为动力源;传动轴(2)上的凸轮(5)通过连杆机构(19)驱动集物耙(13)在水平面摆动,驱使垃圾向打捞口汇集,网状抄板7将其打捞至网状输送板(10)上,通过输送系统将其送至垃圾箱(4)。本发明的水面漂浮垃圾清理机具有自适应能力强,节约能源,工作效率高,无需人工维护,使用范围广等特点,可广泛用于清理江、河及湖泊的水面漂浮垃圾。
摘要附图
权利要求书 1、一种水面漂浮垃圾清理机,其特征在于:浮动平台(14)活动套穿插于至少二根立柱(3)中,机架(15)固定于所述的浮动平台(14)上,在所述的浮动平台(14)上设有垃圾箱(4),所述的浮动平台(14)上设有打捞输送系统,所述的打捞输送系统一端与所述的垃圾箱(4)对接,另一端伸到水面输送垃圾,所述的浮动平台(14)上设有与所述的打捞输送系统传动连接的驱动系统。 2、根据权利要求1所述的水面漂浮垃圾清理机,其特征在于:集物耙(13)铰接于所述的机架(15)上,所述的集物耙(13)由所述的驱动系统驱动在水平面摆动且所述的集物耙(13)对应将垃圾摆动到所述的打捞输送系统的入口端。 3、根据权利要求1或2所述的水面漂浮垃圾清理机,其特征在于:所述的打捞输送系统是在输送架(18)上设有连接轴(9)和链轮(11),所述的链轮(11)与所述的驱动系统传动连接,在所述的链轮(11)上设有两根平行同步输送链(12),所述的平行同步输送链(12)每隔一定链节数用一根长轴(8)连接于两根所述的平行同步输送链(12)之间,在所述的平行同步输送链(12)上相间设有网状输送板(10)和网状抄板(7),所述的网状输送板(10)的一侧通过两个一字型铰链杆(17)铰接于所述的平行同步输送链(12)的长轴(8)上,可绕其自由转动,另一侧搭接于下一个所述的平行同步输送链(12)的长轴(8)上;所述的网状抄板(7)由两个成60°角度的V型铰链架(16)铰接于所述的平行同步输送链(12)的长轴(8)上,所述的V型铰链架(16)一侧搭接于所述的平行同步输送链(12)的下一个长轴(8)上,另一侧支撑所述的网状抄板(7)使其与传送面成60°角度。 4、根据权利要求1或2所述的水面漂浮垃圾清理机,其特征在于:所述的驱动系统是水轮(1)和驱动补偿电机(6)分别通过离合器连接于传动轴(2)的两端,所述的传动轴(2)与所述的打捞输送系统和所述的集物耙(13)传动连接。 5、根据权利要求4所述的水面漂浮垃圾清理机,其特征在于:凸轮5集成于所述的传动轴(2)上,所述的集物耙(13)通过连杆机构(19)与所述的凸轮(5)传动连接。
一种水面漂浮物自动清理机器人结构设计 史浩辉,李莉莉,付宗国,罗准,官俊 (浙江海洋大学船舶与机电工程学院,浙江舟山316022) 摘要:为了解决传统的垃圾打捞船难以解决的小型水面悬浮物的问题,提出一种利用“漩涡”和网筛工作原理,并以太阳能为新能源的一种水面漂浮物清理机器人的设计方案。实现对水体的“二次清理”,也可在水面航行过程或在静止在某固定点完成垃圾的收集,方便灵活。 关键字:新能源;机器人;网筛过滤;环保设备 中图分类号:TP242.3文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员9)01原园110原园3 Structural Design of an Automatic Cleaning Robot for Water Surface Floating Object SHI Haohui,LI Lili,FU Zongguo,LUO Zhun,GUAN Jun (School of Naval Architecture and Electromechanical Engineering,Zhejiang Ocean University,Zhoushan316022,China) Abstract:In order to solve the problem that traditional garbage salvage vessels are difficult to collect small water surface floating objects,this paper proposes a design scheme of a surface floating object cleaning robot that uses the principle of whirlpool and mesh screen and uses solar energy as new energy.To achieve the"secondary clean-up"of water,it is also convenient and flexible to collect garbage in the surface navigation process or at a fixed point. Keywords:new energy;robot;mesh screen filtering;environmental protection equipment 0引言 当前国内外对于封闭或小型水域垃圾清理研究较 少,水上垃圾清理主要以人工清理为主。虽然目前国内外 所开发出的垃圾清理船种类繁多,作用原理也不一而足, 但它们大都是定位于江、河、湖、海等大面积水域的垃圾 清理,而且只能对于水中的较大体积的漂浮物进行清理, 而对于水中较小的悬浮垃圾却是束手无策,不能对水体 的清洁作进一步的处理。本文设计了一种水面漂浮物自 动清理机器人,不仅可以清理较大体积漂浮物,而且可以 清理水面小型的悬浮物(如浮萍、藻类、果皮等)[1],解决了 传统的垃圾打捞船难以解决的小型水面悬浮物的问题。 1水面漂浮物清理机器人 1援1水面机器人主要结构 水面漂浮物自动清理机器人,包括船体及船体的前后两侧分别设置的前阀门和后阀门,且船体中设有网筛。船体的内部为用于放置网筛的主舱室、船体前舱、船体后舱、片体内隙、船舱侧隙组成;前舱阀门的启闭型式为滑移式,并且船体前舱和船体后舱通过船舱侧隙连接。船体底部安装有斗状套筒,斗状套筒末端与水泵进水口相连;在水泵出水口安装电磁阀,在船体底部后侧对称安装两个水下推进器;且水下推进器上都设有推进器螺旋桨。船体与机器人上盖通过U型滑槽滑动连接,机器人上盖前端设置有激光雷达传感器,船体后舱内设置有控制装置;且控制装置为控制在船体底部的水泵工作,还控制着水下推进器的转速,船体前舱里安装超级电容[2]。实现太阳能充电和内置电池储电的互换,通过无线电无线遥控、自主控制互换的方式实现清理垃圾的智能化。 1.2机器人流线型外形 为了减少机器人在水下时,由于水体对机器人表面造成的阻力问题,提高水面垃圾清理机器人在湖面、河流中的能动性。我们把该机器人的外形构造为流线型外形,提出构思的想法和高速列车的车头结构大致相同,对于水流有顺流作用,以此来减少水中阻力对机器人的能源消耗,同时也更加美观[3]。如图2所示,网筛的顶部为通过船舱侧隙表面上设置的网筛扣固定,整体侧面都为流线型外型。 2主要设备与性能 2.1网筛过滤装置和仓内垃圾处理 如图3,船体的主舱室、船体前舱、船体后舱中都放置 图1水面漂浮物自动清理机器人的3/4结构示意图 后阀门2.船盖侧夹层3.片体内隙4.推进器螺旋桨 水下推进器主体6.水泵7.电磁阀8.斗状套筒9. 前舱10.前阀门11.激光雷达传感器12.船盖前夹层 太阳能电池板 13 11 10 9876 5 1 110 圆园员9年第1期网址:https://www.doczj.com/doc/d34500830.html,电邮:hrbengineer@https://www.doczj.com/doc/d34500830.html,
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920441587.8 (22)申请日 2019.04.03 (73)专利权人 西安科技大学 地址 710600 陕西省西安市临潼区陕鼓大 道48号 (72)发明人 陈鑫 杨芝 (74)专利代理机构 泰州淘权知识产权代理事务 所(普通合伙) 32365 代理人 曾涛 (51)Int.Cl. E02B 15/10(2006.01) B63B 35/32(2006.01) (54)实用新型名称一种水面漂浮垃圾清理船(57)摘要本实用新型公开了一种水面漂浮垃圾清理船,包括由两个船体,两个船体的上方设有收集网,船体连接板上固定有密封筒,密封筒内设置有船体动力电机以及方向舵控制连杆电机,左侧船体的内部设置有打捞动力电机以及动力传动结构,船体的外侧连接一船体固定带轮且在该固定轴上通过轴承转动连接有打捞臂,打捞臂上固定设置有打捞臂齿轮,所述打捞动力电机通过动力传动结构控制打捞臂齿轮转动,打捞臂的一端设置有一齿轮轴,齿轮轴的两端分别设置有打捞网带轮以及打捞网换向齿轮,远离打捞臂齿轮的通孔内连接有一打捞网轴,打捞网轴的另一端与对应侧的打捞臂转动连接,打捞网带轮通过皮带与船体固定带轮连接,本实用新型可以实现河面 垃圾快速清理。权利要求书1页 说明书3页 附图4页CN 209741802 U 2019.12.06 C N 209741802 U
权 利 要 求 书1/1页CN 209741802 U 1.一种水面漂浮垃圾清理船,其特征在于:包括由船体连接板(1)连接的两个船体(2),两个所述船体(2)的上方固定架设有收集网(3),所述船体连接板(1)上固定有密封筒(4),密封筒(4)内设置有船体动力电机以及方向舵控制连杆电机,密封筒(4)的外端伸出有分别与船体动力电机以及方向舵控制连杆电机连接的螺旋桨(5)和方向舵(6),左侧船体(2)的内部设置有打捞动力电机(10)以及动力传动结构,右侧船体(2)的内部设置有运动控制电路板(11)以及电池(12),船体(2)的外侧分别通过固定轴连接一船体固定带轮(13)且在该固定轴上通过轴承转动连接有打捞臂(14),打捞臂(14)上固定设置有打捞臂齿轮(15),所述打捞动力电机(10)通过动力传动结构控制打捞臂齿轮(15)转动,打捞臂(14)的一端设置有两个通孔,靠近打捞臂齿轮(15)的通孔内通过轴承连接一齿轮轴,齿轮轴的两端分别设置有打捞网带轮(16)以及打捞网换向齿轮(17),远离打捞臂齿轮(15)的通孔内通过轴承转动连接有一打捞网轴,打捞网轴上设置有打捞网(18)以及与打捞网换向齿轮(17)啮合的打捞网齿轮(19),打捞网轴的另一端通过轴承与对应侧的打捞臂(14)转动连接,所述打捞网带轮(16)通过皮带(20)与船体固定带轮(13)连接。 2.根据权利要求1所述的一种水面漂浮垃圾清理船,其特征在于:所述船体连接板(1)的中部开设有孔洞。 3.根据权利要求1所述的一种水面漂浮垃圾清理船,其特征在于:两侧船体(2)的前端分别设置有一前伸臂(7),两个前伸臂(7)由一根轴连接,轴上固定有一前挡网(8),前挡网(8)的两侧分别设置有一通过扭簧安装在轴上的侧挡板(9),所述侧挡板(9)能够绕轴上下翻转且在扭簧的作用下自动回位。 4.根据权利要求1所述的一种水面漂浮垃圾清理船,其特征在于:所述打捞网带轮(16)与船体固定带轮(13)直径相同。 5.根据权利要求1所述的一种水面漂浮垃圾清理船,其特征在于:所述动力传动结构包括一中间轴(22)、蜗轮蜗杆传动结构以及左右动力传动轴(23),所述蜗轮蜗杆传动结构包括啮合传动的蜗轮(24)以及蜗杆(25),所述蜗杆(25)通过联轴器与打捞动力电机(10)传动连接,所述蜗轮(24)固定于中间轴(22)上,中间轴(22)的外侧端设置有一与打捞臂齿轮(15)啮合的传动齿轮(26),中间轴(22)与左右动力传动轴(23)上分别设置有相互啮合的高速齿轮(21)和低速齿轮(27)。 2
“水上漂浮物自动清理机器人”项目研究结题报告 学生姓名:鲍陈磊于一帆陈姝妍刘冰 学院名称:电气工程及自动化学院 指导老师:雷呈喜助理工程师 1课题研究目的 本课题所要研制的水面漂浮物自动清理机器人是一种新型高科技环保产品,主要用于水面漂浮物(如漂浮垃圾)的打捞和收集工作。其自动化程度较高,能完成对各种水面漂浮垃圾的扫描、和收集工作,并能有效回避障碍物,收集满后还能自动返回,同时也可以将其改为由工人遥控完成,能适应各种情况下的工作,从而使得使用的范围更加广泛,效果更加显著。 2课题背景 近年来,随着工业的发展,我国水体污染日益加剧,社会影响巨大,造成的经济损失更是无以估量。在经济不断发展的今天,人们已经越来越意识到环境保护的重要性,特别是水体保护的重要性,这不仅仅是美化我们的生活环境,创造更加适宜的生存空间,而且更是对经济、对我们的日常生活有着十分深刻的现实 对于水面漂浮物的治理,国外已研制成功大型综合清污船等自动化水平比较高的水面固体垃圾收集机械,定时在河道上巡航清污,用较小的经济成本换来了较大的环境效益。 而国内的治理现状仍然停留在人工打捞阶段,效率比较低,工作强度比较大,亟需实用的机械化设备参与清污。 于此同时,人工打捞方式还有一定的限制,对于水面比较狭窄的地方,或是水较少,水深小于50cm左右的地方,就无法进行正常的打捞工作;同时,对于一些污染比较严重的水体,人工打捞也就不太合适了。 我们研制的水上漂浮物自动清理机器人模型,就是为了改进以上人工打捞的不足而设计的,可以在很大程度上提高固体垃圾收集的效率和垃圾收集的范围,降低成本,减少工作人员的工作强度。它可以实现自动扫描、寻找、识别各种漂浮于水面之上的垃圾,自动地运动到垃圾处收集垃圾,把收集到的废物放在回收箱。同时可以实现人工遥控控制,以满足各方位的需要。 3课题研究主要内容 我们设计制作的水上漂浮物自动清理机器人模型如下图所示,由机械部分和电子部分构成。
·76· 兵工自动化 Ordnance Industry Automation 2018-04 37(4) doi: 10.7690/bgzdh.2018.04.019 一种涡旋式水面清洁机器人 朱盛颖,郭旭玲,邓彦松 (西南民族大学电气信息工程学院,成都610000) 摘要:为克服水面清理机器船结构复杂、清理难度大和效率低等问题,提出并研发一种涡旋式水面清洁机器人。此机器人以产生涡旋卷入垃圾为设计原理,结构简单且自适应能力强,就其机械体系结构及动力系统、清洁系统、供能系统和通信系统等展开详细阐述。研究结果表明:该机器人能够实现水面垃圾清理,能保护环境和高效利用资源,对我国水域清理起到较为重要的意义。 关键词:涡旋;水面清洁;Arduino;太阳能;机械结构 中图分类号:TP242 文献标志码:A A Vortex Water Surface Cleaning Robot Zhu Shengying, Guo Xuling, Deng Yansong (College of Electrical & Information Engineering, Southwest Minzu University, Chengdu 610000, China) Abstract: In order to solve the problem of complex structure, difficult cleaning and low efficiency of the water surface cleaning machine ship, a vortex water surface cleaning robot is proposed and developed. The robot is designed to generate vortex involvement in collecting waste, its structure is simple and adaptive ability is strong, in this paper, the mechanical system structure and the dynamic system, cleaning system, power system and communication system in detail. The results show that the robot can clean the surface of water, protect the environment and use resources efficiently, and it has great significance for the cleaning of water in our country. Keywords: vortex; water surface cleaning; Arduino; solar energy; mechanical structure 0 引言 近年来,我国陆续建立了许多大型水电站和水库,在各景点和娱乐场所也都建立了假山和人工湖。由于一次性包装食品的大量生产和消费等原因,致使江、河、湖泊、水库上漂浮大量垃圾,引发严重的生态问题,尤其是航运河道、发电站前池,若不及时清理,将会影响航道运行、发电机组正常运转。目前,大部分地区依旧采取人工驾驶船打捞清理的方式,工作效率低,人力资源耗费大;因此,不少水面垃圾清理机器船应运而生。国内外清理水面漂浮垃圾的设备及方法大致可分为:悬臂式安装和机械格栅,但都存在结构复杂、对安装要求高、清理能力有限等缺点[1-2]。 为克服水面清理机器船结构复杂、清理难度大和效率低等一系列问题,笔者从实际出发,秉承“绿色环保、节能便捷”的理念,以流体学、机械结构设计、远程控制等作为理论基础,并结合软硬件技术,设计一款涡旋式水面垃圾清理机器人。该机器人能高效安全地实现全天候的打捞水面漂浮垃圾工作,能节约并有效利用资源,具有结构简单、活动灵活的特点。1 总体设计方案 涡旋式漂浮垃圾清理机器人,是一种悬浮于人工湖、水电站、水库等各种水域中用来自动收集水面漂浮物的环卫设备,主要由浮动平台、供能模块、动力模块、清理模块、报警模块和遥控模块组成。涡旋式水面清洁机器人设计框图如图1所示。 图1 设计框图 机器人最上方安放太阳能电池板,作为供能系统;其正下方为机器人舱体,分为收集舱、真空舱2个舱体。收集舱内含垃圾滤网、直流潜水泵;真空舱内含电瓶、主控板等,舱内整体密封,以一真空钢管引出舱内线路,保证与外部通信。舱体外部镶嵌2部水下推进器;体外壁上部有2个进水口,与进水口同一水平线以钢架固定着2个长方体浮台,控制机器人悬浮位置及保证其平衡性[3]。机器人悬浮于水体中,其表面两侧的进水口中线与水平 1 收稿日期:2017-12-25;修回日期:2018-01-26 作者简介:朱盛颖(1997—),女,云南人,白族,从事电子信息工程研究。