龙源期刊网 https://www.doczj.com/doc/c77139995.html,
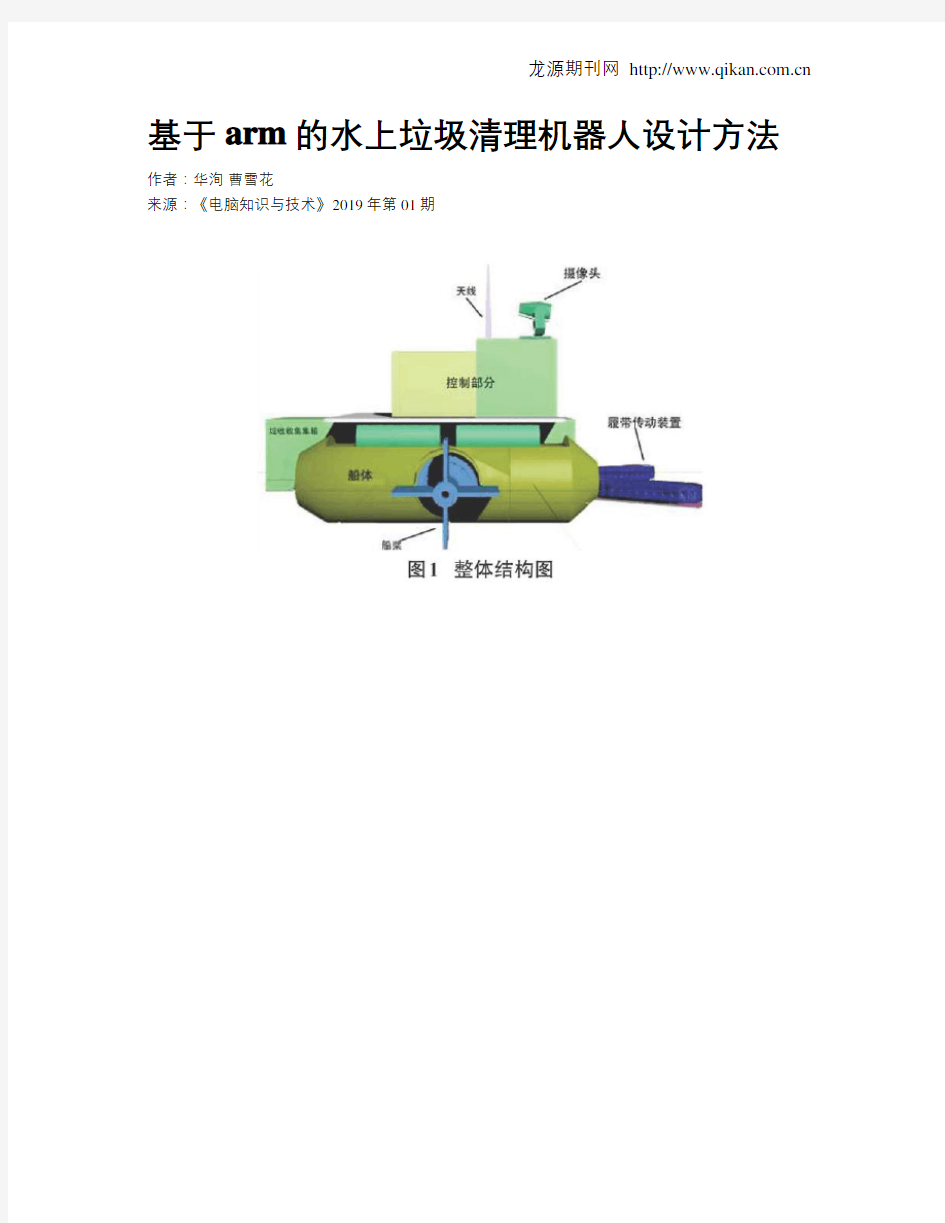
基于arm的水上垃圾清理机器人设计方法
作者:华洵曹雪花
来源:《电脑知识与技术》2019年第01期
珠海各高校首次海面垃圾清理活动 策 划 书 主办单位:北师大珠海分校Green angel 环保协会 北京师范大学—香港浸会大学联合国际学院Green Bridge环保协会
中山大学珠海校区绿色青年组织 赞助单位: 策划单位:北师大珠海分校Green angel 环保协会 时间: 一、活动背景: 2010年7月1号,“2010长江校友·蓝丝带海洋环保中国行”大连站的活动,在大连星海公园的海滩上展开。海滩沿岸,“中国行”团队成员向市民和游客散发海洋环保宣传册、蓝丝带、蓝色腕带,并讲解海洋环保知识。蓝丝带在大连掀环保浪潮,呼吁市民参与全面清理水上水下垃圾活动。 美丽富饶的海洋,清澈湛蓝的海水,这般美丽的风景,似乎已成为过去。如今,那片蓝渐渐离我们远去,取而代之的是沉沉的灰色。曾经清凉透心的海风,如今却带着阵阵恶臭。珠海,这个三面环海、美丽浪漫的海滨城市,以海景引人,却容许垃圾在海边随波逐流。情侣路,这条浪漫之路,沿之地海绵确实“丰富多样”的垃圾。如此浪漫之地,曾经是为了接近海洋、欣赏海景,如今却让行人掩鼻而过,不愿多看几眼——沿此路走下去,我们看多的不是美丽的海景,而已漂浮着塑料袋、一次性饭盒、塑料瓶这些乱七八糟的垃圾的海面,还有痛苦挣扎的小鱼和死去多时的鱼。我们闻到的不是清新的气味,而是令人恶心的臭味。 关爱地球蓝色“血液”——海洋,打造美丽的珠海,打造浪漫的海滨之城,不仅是政府的事,还是每一个人的事,让我们从自身开始,用自己的实际行动来保护海洋、保护我们的家园。
远眺的美丽近看的悲哀!——情侣路那边的海的情况 二、活动主题: 关爱地球蓝色“血液”——海洋 三、活动目的: 1、使大学生亲身体验有大海受到的破坏,增强大学生的环保意识,提高大学生的实践能力,增强大学生的社会责任感。 2、宣传环保,普及群众,让更多的人参与到环保的队伍中来。 3、望能引起社会的反响,令政府重视,加大海洋的整治力度,支持我们的行动,进一步推广环保活动。 四、活动的意义: 唤醒人们保护环境的意识,让环保的思想深入每一个人的心中;增强我校学生参与环保的意识,用心去保护我们学校以及周边的环境;通过我们的努力,让珠海的海面变得更美、更清澈! 五、预期目标: 1、通过调查,找出珠海漂浮着乱七八糟的垃圾的海面,分析并做出解决方案。 2、与其他学校的同学合作,初步清理干净海面上的垃圾。 3、引起社会反响,令政府重视,加大海洋的整治力度,支持我们的行动。 4、让该活动成为环协的一个特色活动,每学期举办一到二次。 六、活动流程: (一)、前期准备工作: 宣传部: 1、负责海报、传单的制作,海报的张贴和传单的派发。张贴海报应在活动前一星期开始进行,贴于各宿舍楼下宣传栏及校内宣传栏,直至活动结束。
专业课程设计说明书 题目:水面垃圾清理机器的设计 指导教师:何韶君 班级:机械设计制造及其自动化专业142班设计者:杨威威 学号:2014031224 校院:大连民族大学机电工程学院
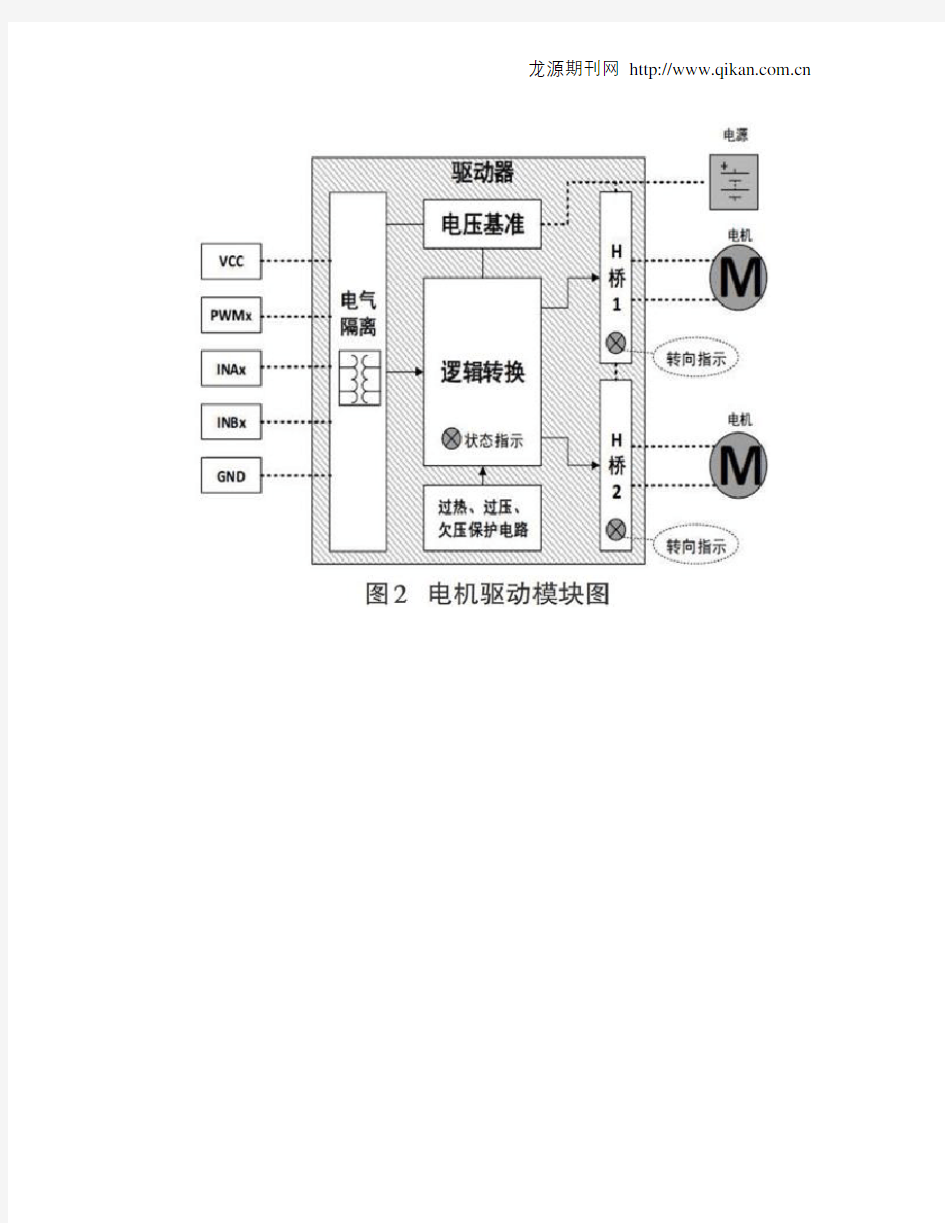
目录 专业课程设计说明书 (1) 一.摘要 (2) 二.Abstract (3) 三.引言 (4) 四.机器人结构设计 (4) 四.1 整体结构设计理念 (4) 四.2 整体结构设计 (5) 四.3 垃圾收集装置设计 (6) 四.4 垃圾辅助收集装置设计 (7) 五.船重和排水量的计算 (7) 六.最大吃水深度的计算 (8) 七.动力装置设计 (8) 八.硬件设计 (10) 八.1系统总体设计 (10) 八.2电源模块 (11) 八.3电机驱动模块 (11) 八.4无线传输模块 (12) 八.5继电器模块 (12) 八.6主程序设计 (13) 九.影像收集系统设计 (13) 十.工作参数,待机和工作时长 (14) 十一. 垃圾收集特性及参数 (14) 十二.外观特性 (15) 十三. 控制方式 (15) 十四. 成本报告 (15) 十六. 市场分析 (19) 十六.1 市场推广 (19) 十六.2 盈利模式 (20) 结束语 (20) 参考文献: (20) 一.摘要 本文为解决现如今小型封闭水面垃圾清理耗费人力物力等问题,设计制作了一款由人工辅助远程遥控进行水面垃圾清理的机器人。水面垃圾打捞船针对水面环境污染的问题,主要致力于中小型湖泊河流等水域的固体垃圾清理,如塑料袋、饮料瓶,树枝树叶以及其它易清理的水面垃圾。实现水面垃圾清理的机械化与自动化,整个打捞过程无需人工直接参与,安全性非常好,效率大约是人工打捞的几十倍,水面越大、距离越远效果越显著。本文主要对水面垃圾自动打捞船进行了船体结构、动力装置、打捞及传输装置、垃圾存储装置以及其他零部件的设计、计算及校核等。分析了水面垃圾自动打捞船需要实现的功能要求,
工业机器人课程设计基于Matlab的工业机器人运动学和雅克比运动分析 班级: 学号 姓名:
目录 摘要 ..................................................................................................................................................... - 2 - PUMA560机器人简介 ...................................................................................................................... - 3 - 一、PUMA560机器人的正解 .......................................................................................................... - 4 - 1.1、确定D-H 坐标系 .................................................................................................................... - 4 - 1.2、确定各连杆D-H 参数和关节变量 ........................................................................................ - 4 - 1.3、求出两杆间的位姿矩阵 ......................................................................................................... - 4 - 1.4、求末杆的位姿矩阵 ................................................................................................................. - 5 - 1.5、M A TLAB 编程求解 .................................................................................................................. - 6 - 1.6、验证 ......................................................................................................................................... - 6 - 二、PUMA560机器人的逆解 .......................................................................................................... - 7 - 2.1、求1θ ........................................................................................................................................ - 7 - 2.2、求3θ ........................................................................................................................................ - 7 - 2.3、求2θ ........................................................................................................................................ - 8 - 2.4、求4θ ........................................................................................................................................ - 9 - 2.5、求5θ ........................................................................................................................................ - 9 - 2.6、求 6 θ ...................................................................................................................................... - 10 - 2.7、解的多重性 ........................................................................................................................... - 10 - 2.8、M A TLAB 编程求解 ................................................................................................................ - 10 - 2.9、对于机器人解的分析 ........................................................................................................... - 10 - 三、机器人的雅克比矩阵 ............................................................................................................... - 11 - 3.1、定义 ....................................................................................................................................... - 11 - 3.2、雅可比矩阵的求法 ............................................................................................................... - 11 - 3.3、微分变换法求机器人的雅可比矩阵 ................................................................................... - 12 - 3.4、矢量积法求机器人的雅克比矩阵 ....................................................................................... - 13 - 3.5、M A TLAB 编程求解 ................................................................................................................ - 14 - 附录 ................................................................................................................................................... - 15 - 1、M ATLAB 程序 ........................................................................................................................... - 15 - 2、三维图 ...................................................................................................................................... - 24 -
垃圾分类处理小常识 城乡生产、生活垃圾采取“源头分类、专业运输、综合处理”的方式,在源头上将垃圾分成厨余垃圾、可回收垃圾、有害垃圾、其它垃圾、建筑垃圾五类。厨余垃圾通过厌氧发酵产生沼气电,剩余的沼液沼渣制肥;可回收垃圾通过工厂流水线分拣后打包压缩出售;有害垃圾集中收集后运送至专业的有害垃圾处理机构无害化处理;其它垃圾运送至就近的填埋厂无害化填埋;建筑垃圾运输到指定地点填埋。 1、厨余垃圾的处理方法: 包括剩菜剩饭、菜根菜叶、果皮、茶叶渣、过期食品等,各户家将垃圾分好类,投入到垃圾收集亭中相对应的厨余垃圾桶。最后由垃圾转运员送到厨余垃圾生化工厂产生沼气电,厨余垃圾是当前对周边环境、地下水资源污杂最为严重的一类,一定严格分类、谨慎对待。 2、可回收垃圾处理方法: 包括废纸、塑料、玻璃、金属和布料五大类。废纸:主要包括报纸、期型、图书、各种包装纸、办公用纸、广告纸、纸盒等。塑料:主要包括各种袋、塑料包装物、一次性塑料餐盒和餐具、牙刷、杯子、矿泉水瓶、牙膏皮等。金属:主要包括易拉罐、罐头等。布料:主要包括各种废弃衣服、桌布、洗脸巾、书包、鞋等。由垃圾转运员上门收购或自行投入垃圾收集亭的可回收垃圾桶。
3、有害垃圾的处理方法: 包括废电池、废日光灯泡、废水银温度计、过期药品、农药瓶等。有害垃圾是指对人体健康有害重金属、有毒的物质或者对环境造成现实危害或者潜在危害的废弃物。由于其处理工艺较复杂,所以必须送至专业的公司集中处理。各户加重分类后投入垃圾收集亭的有害垃圾桶,由公司统一安排运送。 4、其他垃圾的处理方法:包括除上述几类垃圾之处的煤灰、炉渣、骨头、卫生间废纸、纸巾等难以回收的废弃处。采用无害化填埋可减少对地下水、地表水、土壤及空气的污染。各户在家分好类后投放至垃圾收集亭的其它垃圾桶,由收集员统一运送至垃圾中转站后就近无害填埋。 5、建筑垃圾的处理方法: 包括因建设或装修剩下的砖瓦、陶瓷、渣土、石灰、沙卵石等难以回收的废弃物,不能堆放在道路两侧,应拖运到指定的地点存放或填埋,不得随意丢弃和堆放。
水上垃圾清理装置 1 论文摘要 1.1中文摘要 摘要 随着我国现代化进程的加快、垃圾产生量的增加,水上漂浮垃圾的数量也日益增多,而现有人工清理方式不仅效率低下,而且带有一定的危险性。鉴于此,我们设计了这个水上垃圾清理装臵,以实现对漂浮垃圾环保、高效的收集。【关键词】垃圾收集清理环保节能
目录 1 论文摘要 (1) 1.1 中文摘要 (1) 1 引语 (1) 2 作品简介 (1) 3 作品分类 (1) 4 设计目的 (1) 5 设计基本思路 (1) 6 作品原理简介 (1) 7 作品模型图片及照片 (1) 8 使用说明 (3) 9 作品主要创新点 (3) 10 作品可行性 (4) 11 技术特点优势分析 (4) 12 适应范围 (5) 13 市场分析 (5) 14 经济效益预测 (5) 15 推广价值 (5) 16 结束语 (7)
1 引语 自古中华民族就以秀丽的山河文明于世,而在改革开放三十多年之后,我们要以更加美好的景色欢迎世界各地的友人。但随着现代化的加快,我们看到的却已不是美丽的山河,而是工业文明所导致的环境污染,以及由此所引发的种种疾病,灾难。有鉴于此,我们设计了这个水上垃圾清理装臵,希望以此为祖国环境保护尽自己的绵薄之力。 2作品简介 本作品利用船只自身行进过程与水面的相对运动,带动垃圾收集器工作,达到收集清理水面漂浮垃圾的目的。广泛适用于河面,湖面,海面等垃圾比较多的区域。具有环保、无污染、收集效率高、操作简单、成本低廉等特点。 3作品分类 机械控制与能源化工类 4设计目的 本作品是专为清理河流湖泊及海面上的漂浮垃圾而设计的。机械化的设计不仅无需外加动力,美观的外形也成为水上一道靓丽的风景线,亦可起到宣传环保意识的作用。 5设计基本思路 河流湖泊漂浮垃圾多,人工清理费时费力。本作品主要利用船只作为收集清理载体,配合本作品加以简单改装,即可实现利用船只的闲余能源清理漂浮垃圾的目的。 6作品原理简介 船只前进过程中,水流的冲击力使位于船只后方的叶轮转动,叶轮带动传送带的转动。传送带上的传送收集袋在随传送带转动的过程中把位于收集口后方的垃圾收集起来。随着传送带的转动,传送收集袋运动至后方的收集器上方,并随传送带转动,将垃圾倒入收集器中。此收集过程往复循环。 7作品模型图片及照片
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910204326.9 (22)申请日 2019.03.18 (71)申请人 南京灵雀智能制造有限公司 地址 211000 江苏省南京市江宁区麒麟科 技创新园智汇路304号 (72)发明人 王晨露 (74)专利代理机构 南京泰普专利代理事务所 (普通合伙) 32360 代理人 窦贤宇 (51)Int.Cl. E02B 15/10(2006.01) E02B 15/04(2006.01) B63B 35/32(2006.01) (54)发明名称 一种水上漂浮物清理装置及其清理方法 (57)摘要 本发明公开了一种水上漂浮物清理装置及 其清理方法,属于环保器械。包括:基础组件、收 集组件、清理组件和固定组件四部分。基础组件 包括设置船体之间的水流通道,设置在水流通道 上过滤筛板,设置在船体的外侧的漂浮栅栏;收 集组件包括第一伺服电机,通过传动组件与所述 第一伺服电机相连接旋转叶片;清理组件包括与 第一伺服电机连接的螺纹滚筒;固定组件包括船 体底部的多个收缩式船锚。本发明通过收缩式船 锚和固定缆绳将清理装置固定在狭窄的水域,利 用该水域水流的流动性,对垃圾进行聚集、收集; 或通过牵引船带动收集装置在污染区域进行“S ” 形往复运动,实现对垃圾进行聚集、收集。解决了 小型水域的漂浮垃圾清理的问题。权利要求书2页 说明书6页 附图3页CN 109853500 A 2019.06.07 C N 109853500 A
权 利 要 求 书1/2页CN 109853500 A 1.一种水上漂浮物清理装置,其特征在于,包括: 基础组件,包括连接板,通过连接板连接在一起的第一船体和第二船体,由所述连接板、第一船体和第二船体之间留有的空间组成的水流通道,设置在所述水流通道上中部和尾部的第一过滤筛板和第二过滤筛板,以及分别设置在所述第一船体和第二船体的外侧且呈“V”字形的漂浮栅栏; 收集组件,包括设置在所述第一船体内的第一伺服电机,通过皮带与所述第一伺服电机输出轴相连接且其两端分别通过轴承固定在所述第一船体和第二船体前端的旋转轴,通过相互啮合的齿轮副与所述旋转轴相连接的第一旋转叶和第二旋转叶片; 清理组件,包括通过皮带与所述收集组件中的第一伺服电机输出轴连接且设置在所述第一过滤筛板前方的螺纹滚筒,以及设置在所述第二船体上的垃圾回收槽; 固定组件,包括分别设置在所述第一船体和第二船体底部的多个收缩式船锚,连接所述收缩式船锚和船体之间的减震弹簧,以及一端与漂浮栅栏相连接、另一端固定于岸边、且其主体漂浮于水面上的固定缆绳。 2.根据权利要求1所述的水上漂浮物清理装置,其特征在于,所述齿轮副包括:分别位于所述旋转轴的两端的第一锥齿轮组和第二锥齿轮组,输入端与第一锥齿轮组和第二锥齿轮组输出齿轮固定连接且输出端与所述第一旋转叶和第二旋转叶片相连接的第一传动齿轮组和第二传动齿轮组;其中,第一传动齿轮组的齿轮个数为奇数,第二传动齿轮组为偶数。 3.根据权利要求1所述的水上漂浮物清理装置,其特征在于,所述螺纹滚筒包括:滚筒轴、外螺纹部、皮带连接部,端点固定部;皮带连接部通过皮带或齿条与所述第一伺服电机输出轴连接,所述皮带连接部设置滚筒轴一侧,外螺纹部与所述滚筒轴固定连接,且所述外螺纹部为右旋螺纹,其外螺纹由滚筒轴与第一船体连接处延伸至滚筒轴与第二船体连接处,螺纹截面为月牙形,月牙凹槽部朝向所述第二船体一侧,设置在所述端点固定部与所述滚筒轴的另一端固定连接。 4.根据权利要求1所述的水上漂浮物清理装置,其特征在于,所述第二过滤筛板上设置有多层吸油海绵片,其中,所述吸油海绵片采用厚度为3~5cm的聚氨酯海绵薄片作为基质,在其表层和过滤孔洞内均覆盖有氧化石墨烯涂层。 5.根据权利要求1所述的水上漂浮物清理装置,其特征在于,所述收缩式船锚有伸缩杆和固定装置两部分组成;其中,所述伸缩杆包括:多个同轴套装的活动杆,设置在每组活动杆底部和顶部两侧的三个定滑轮,设置在所述活动杆顶部的收线辊,以及一端固定于最内层活动杆底部、另一端固定于所述收线辊且其主体依次有外至内依次穿过定滑轮的钢丝绳;所述固定装置包括:设置在所述活动杆的底部的电机箱,固定安装在所述电机箱内的第二伺服电机,以及与所述第二伺服电机输出轴相连接的圆锥形钻头。 6.根据权利要求1所述的水上漂浮物清理装置,其特征在于,所述清理装置还包括驱动组件;其中驱动组件可以为设置为船体尾部的螺旋推进器,还可以为:设置在所述清理装置前端的控制方向和提供动力的两个牵引船,且所述牵引船与所述漂浮栅栏之间通过固定缆绳连接,且固定缆绳漂浮于水面上。 7.根据权利要求1所述的水上漂浮物清理装置,其特征在于,所述清理装置还包括侦查组件;其中,所述侦查组件的主体为四旋翼无人机,还包括:图像收集模块、图像处理模块、 2
说明书摘要 本发明公开了一种水面漂浮垃圾清理机,机架(15)固定于浮动平台(14)上,浮动平台(14)穿插于四根立柱(3)中,从而限制其水平移动和转动,清理机随水位高低自动升沉调整到最佳工作位置;水流驱动水轮运转,为清理机提供动力,处于缓流或静水区,驱动补偿电机(6)作为动力源;传动轴(2)上的凸轮(5)通过连杆机构(19)驱动集物耙(13)在水平面摆动,驱使垃圾向打捞口汇集,网状抄板7将其打捞至网状输送板(10)上,通过输送系统将其送至垃圾箱(4)。本发明的水面漂浮垃圾清理机具有自适应能力强,节约能源,工作效率高,无需人工维护,使用范围广等特点,可广泛用于清理江、河及湖泊的水面漂浮垃圾。
摘要附图
权利要求书 1、一种水面漂浮垃圾清理机,其特征在于:浮动平台(14)活动套穿插于至少二根立柱(3)中,机架(15)固定于所述的浮动平台(14)上,在所述的浮动平台(14)上设有垃圾箱(4),所述的浮动平台(14)上设有打捞输送系统,所述的打捞输送系统一端与所述的垃圾箱(4)对接,另一端伸到水面输送垃圾,所述的浮动平台(14)上设有与所述的打捞输送系统传动连接的驱动系统。 2、根据权利要求1所述的水面漂浮垃圾清理机,其特征在于:集物耙(13)铰接于所述的机架(15)上,所述的集物耙(13)由所述的驱动系统驱动在水平面摆动且所述的集物耙(13)对应将垃圾摆动到所述的打捞输送系统的入口端。 3、根据权利要求1或2所述的水面漂浮垃圾清理机,其特征在于:所述的打捞输送系统是在输送架(18)上设有连接轴(9)和链轮(11),所述的链轮(11)与所述的驱动系统传动连接,在所述的链轮(11)上设有两根平行同步输送链(12),所述的平行同步输送链(12)每隔一定链节数用一根长轴(8)连接于两根所述的平行同步输送链(12)之间,在所述的平行同步输送链(12)上相间设有网状输送板(10)和网状抄板(7),所述的网状输送板(10)的一侧通过两个一字型铰链杆(17)铰接于所述的平行同步输送链(12)的长轴(8)上,可绕其自由转动,另一侧搭接于下一个所述的平行同步输送链(12)的长轴(8)上;所述的网状抄板(7)由两个成60°角度的V型铰链架(16)铰接于所述的平行同步输送链(12)的长轴(8)上,所述的V型铰链架(16)一侧搭接于所述的平行同步输送链(12)的下一个长轴(8)上,另一侧支撑所述的网状抄板(7)使其与传送面成60°角度。 4、根据权利要求1或2所述的水面漂浮垃圾清理机,其特征在于:所述的驱动系统是水轮(1)和驱动补偿电机(6)分别通过离合器连接于传动轴(2)的两端,所述的传动轴(2)与所述的打捞输送系统和所述的集物耙(13)传动连接。 5、根据权利要求4所述的水面漂浮垃圾清理机,其特征在于:凸轮5集成于所述的传动轴(2)上,所述的集物耙(13)通过连杆机构(19)与所述的凸轮(5)传动连接。
河南机电高等专科学校《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号: 姓名:流星 2014 年 10 月 1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15) 一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一
步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,利用限位开关来保护电机和控制机械手位置的准停。 这个课题可以充分的体现机电一体化的由程序自动控制机械结构的运动,对自己以前的所学的课程也是一种巩固。另一方面这个机械手可以实现一定的搬运功能具有很强的实用性能。 2、发展现状和趋势
《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,
沈阳工程学院 课程设计 设计题目:三自由度微型直角坐标工业机器人模型设计 系别自控系班级测本081 学生姓名步勇捷学号 2008310110 指导教师祝尚臻职称讲师 起止日期:2012年 1 月 2 日起——至 2012 年 1 月13 日止 - I -
沈阳工程学院 课程设计任务书 课程设计题目:三自由度直角坐标工业机器人设计 系别自动控制工程系班级 学生姓名学号 指导教师职称讲师 课程设计进行地点: F430 任务下达时间: 2011年 12月31日 起止日期:2012 年 1 月2日起——至 2012 年 1 月13日止教研室主任年月日批准 - II -
三自由度直角坐标工业机器人设计 1 设计主要内容及要求 1.1 设计目的: 1了解工业机器人技术的基本知识以及单片机、机械设计、传感器等相关技术。 2初步掌握工业机器人的运动学原理、传动机构、驱动系统及控制系统并应用于工业机器人的设计中。3通过学习,掌握工业机器人的驱动机构、控制技术,并使机器人能独立执行一定的任务。 1.2 基本要求 1要求设计一个微型的三自由度的直角坐标工业机器人; 2要求设计机器人的机械机构(示意图),传动机构、控制系统、及必需的内外部传感器的种类和数量布局。 3要有控制系统硬件设计电路。 1.3 发挥部分 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选; (2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 顺序阶段日期计划完成内容备注 1 2012.1. 2 讲解主要设计内容,布置任务打分 2 2012.1. 3 检查框图及初步原理图完成情况,讲解及纠正错误打分 3 2012.1. 4 检查机械结构设计并指出错误及纠正;打分 4 2012.1. 5 继续机械机构和传动机构设计打分 5 2012.1. 6 进行控制系统设计打分 6 2012.1.9 检查控制系统原理图设计草图打分 7 2012.1.10 完善并确定控制系统打分 8 2012.1.11 指导学生进行驱动机构的选择打分 9 2012.1.12 进行传感器的选择和软件流程设计打分 10 2012.1.13 检查任务完成情况并答辩打分 - III -
几种垃圾处理方法的比较 目前几种城市生活垃圾的处理方法及其实用性比较: 一. 填埋法:填埋是一种极其消极、万般无哀的垃圾处理方法。虽然该处理方法投资少、工艺简单、处理量大,并较好地实现了地表的无害化。但是,填埋的垃圾并没有进行无害化处理,残留着大量的细菌病毒;垃圾的渗漏液会污染地下水资源. 所以,该方法潜在着极大的隐患,会给子孙后代带来无穷的后患。该方法不仅没有实现垃圾的资源化,而且大量占用土地。目前一些地区引用的卫生填埋法仅是部分地解决了地下水污染防治问题和产生朝气的回收问题,对彻底解决该项目的弊端,还有相当大的距离。许多发达国家已明令禁止填埋垃圾。 二. 焚烧及焚烧发电法:其优点是处理彻底快捷,也实现了垃圾的资源化处理。但是,对有害气体“二恶英”的产生和处理,给该方法带来极大的缺憾。单纯地焚烧,会污染大气;若处理有害气体,投资和运行成本会相当昂贵。而且,我国目前城市生活垃圾成分复杂、热值低,需添加大量辅助燃料,致使许多地区建的起厂子,而运行不起。而且该方法还受处理量的限制,所以我国一般中小城市对建设该技术项目无能为力。该方法不大适应中国国情。 三. 堆肥法:该方法具有投资少,易操作的优点。但存在着致命的缺点: (1).堆腐时间长,一般需三周至一个月,堆积污染严重。 (2).有机物降解不彻底,处理不充分,残留物仍会造成垃圾污染。 (3).堆肥产品杂质多,而且对重金属等有害物质不能有效分离,长期使用堆肥产品,会造成土壤表面沉积,破坏土壤、危害农作物。 (4).堆制过程中,大多数氮营养被自然释放,磷、钾等化合物被自然降解,所以致使肥料质量低下,广大农民不愿问津,市场前景渺茫。 四.资源化综合处理法(即本项目内容) 城市垃圾中包含着不少可回收利用的资源,对其中绝大多数资源物进行回收再利用,不仅可实现变废为宝、化害为益和减容减量的目的,而且产生的经济效益可以解决或大部分解决垃圾处理的成本费用问题。这就给我国广大中小城市,特别是经济欠发达地区乡镇的生活垃圾治理,提供了一个切实可行的途径。就中国的经济发展现状来说,资源化综合处理的方法也是垃圾治理的一个主要发展方向,是一项极适合中国国情的好项目。 资源化综合处理法的先进性和技术优势是: 〈1〉实现了垃圾的减量化。可以使垃圾减量75%—85%,如果条件允许,可以将其剩余的部分残渣生产成轻体建材和建筑陶粒,进而实现了垃圾的“无剩余”处理。 〈2〉实现了垃圾的无害化。经过高温(165—185℃)高压(0.8—1.0MPa)的“热解处理”(热选),垃圾中的所有杂菌、虫卵及病毒、病害已不复存在,彻底地解决了有机垃圾对环境的污染问题。而且在生产过程中,采取了多种对烟尘、恶臭、污水、有害气体、噪音等二次污染的防治措施,从工艺手段及治理措施等方面,对防止二次污染都有成熟可靠的技术保证。 〈3〉实现了垃圾的资源化。几乎所有的废弃物都得到了科学合理的回收再利用。作为两大主要污染源的有机物和废弃塑料90%以上被再度利用,不可回收的可燃垃圾也被制成了高热值环保型燃料,达到了物尽其用。剩余的15—20%的残渣可以制成轻体建材,真正实现了垃圾的资源化无剩余处理。在产生良好的社会效益、
一种水面漂浮物自动清理机器人结构设计 史浩辉,李莉莉,付宗国,罗准,官俊 (浙江海洋大学船舶与机电工程学院,浙江舟山316022) 摘要:为了解决传统的垃圾打捞船难以解决的小型水面悬浮物的问题,提出一种利用“漩涡”和网筛工作原理,并以太阳能为新能源的一种水面漂浮物清理机器人的设计方案。实现对水体的“二次清理”,也可在水面航行过程或在静止在某固定点完成垃圾的收集,方便灵活。 关键字:新能源;机器人;网筛过滤;环保设备 中图分类号:TP242.3文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员9)01原园110原园3 Structural Design of an Automatic Cleaning Robot for Water Surface Floating Object SHI Haohui,LI Lili,FU Zongguo,LUO Zhun,GUAN Jun (School of Naval Architecture and Electromechanical Engineering,Zhejiang Ocean University,Zhoushan316022,China) Abstract:In order to solve the problem that traditional garbage salvage vessels are difficult to collect small water surface floating objects,this paper proposes a design scheme of a surface floating object cleaning robot that uses the principle of whirlpool and mesh screen and uses solar energy as new energy.To achieve the"secondary clean-up"of water,it is also convenient and flexible to collect garbage in the surface navigation process or at a fixed point. Keywords:new energy;robot;mesh screen filtering;environmental protection equipment 0引言 当前国内外对于封闭或小型水域垃圾清理研究较 少,水上垃圾清理主要以人工清理为主。虽然目前国内外 所开发出的垃圾清理船种类繁多,作用原理也不一而足, 但它们大都是定位于江、河、湖、海等大面积水域的垃圾 清理,而且只能对于水中的较大体积的漂浮物进行清理, 而对于水中较小的悬浮垃圾却是束手无策,不能对水体 的清洁作进一步的处理。本文设计了一种水面漂浮物自 动清理机器人,不仅可以清理较大体积漂浮物,而且可以 清理水面小型的悬浮物(如浮萍、藻类、果皮等)[1],解决了 传统的垃圾打捞船难以解决的小型水面悬浮物的问题。 1水面漂浮物清理机器人 1援1水面机器人主要结构 水面漂浮物自动清理机器人,包括船体及船体的前后两侧分别设置的前阀门和后阀门,且船体中设有网筛。船体的内部为用于放置网筛的主舱室、船体前舱、船体后舱、片体内隙、船舱侧隙组成;前舱阀门的启闭型式为滑移式,并且船体前舱和船体后舱通过船舱侧隙连接。船体底部安装有斗状套筒,斗状套筒末端与水泵进水口相连;在水泵出水口安装电磁阀,在船体底部后侧对称安装两个水下推进器;且水下推进器上都设有推进器螺旋桨。船体与机器人上盖通过U型滑槽滑动连接,机器人上盖前端设置有激光雷达传感器,船体后舱内设置有控制装置;且控制装置为控制在船体底部的水泵工作,还控制着水下推进器的转速,船体前舱里安装超级电容[2]。实现太阳能充电和内置电池储电的互换,通过无线电无线遥控、自主控制互换的方式实现清理垃圾的智能化。 1.2机器人流线型外形 为了减少机器人在水下时,由于水体对机器人表面造成的阻力问题,提高水面垃圾清理机器人在湖面、河流中的能动性。我们把该机器人的外形构造为流线型外形,提出构思的想法和高速列车的车头结构大致相同,对于水流有顺流作用,以此来减少水中阻力对机器人的能源消耗,同时也更加美观[3]。如图2所示,网筛的顶部为通过船舱侧隙表面上设置的网筛扣固定,整体侧面都为流线型外型。 2主要设备与性能 2.1网筛过滤装置和仓内垃圾处理 如图3,船体的主舱室、船体前舱、船体后舱中都放置 图1水面漂浮物自动清理机器人的3/4结构示意图 后阀门2.船盖侧夹层3.片体内隙4.推进器螺旋桨 水下推进器主体6.水泵7.电磁阀8.斗状套筒9. 前舱10.前阀门11.激光雷达传感器12.船盖前夹层 太阳能电池板 13 11 10 9876 5 1 110 圆园员9年第1期网址:https://www.doczj.com/doc/c77139995.html,电邮:hrbengineer@https://www.doczj.com/doc/c77139995.html,
**学校 机器人课程设计名称 院系电子信息工程系 班级10电气3 姓名谢士强 学号107301336 指导教师宋佳
目录 第一章绪论 (2) 1.1课程设计任务背景 (2) 1.2课程设计的要求 (2) 第二章硬件设计 (3) 2.1 结构设计 (3) 2.2电机驱动 (4) 2.3 传感器 (5) 2.3.1光强传感器 (5) 2.3.2光强传感器原理 (6) 2.4硬件搭建 (7) 第三章软件设计 (8) 3.1 步态设计 (8) 3.1.1步态分析: (8) 3.1.2程序逻辑图: (9) 3.2 用NorthStar设计的程序 (9) 第四章总结 (11) 第五章参考文献 (12)
第一章绪论 1.1课程设计任务背景 机器人由机械部分、传感部分、控制部分三大部分组成.这三大部分可分成驱动系统、机械结构系统、感受系统、机器人一环境交互系统、人机交互系统、控制系统六个子系统现在机器人普遍用于工业自动化领域,如汽车制造,医疗领域,如远程协助机器人,微纳米机器人,军事领域,如单兵机器人,拆弹机器人,小型侦查机器人(也属于无人机吧),美国大狗这样的多用途负重机器人,科研勘探领域,如水下勘探机器人,地震废墟等的用于搜查的机器人,煤矿利用的机器人。如今机器人发展的特点可概括为:横向上,应用面越来越宽。由95% 的工业应用扩展到更多领域的非工业应用。像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷,还有空间机器人、潜海机器人。机器人应用无限制,只要能想到的,就可以去创造实现;纵向上,机器人的种类会越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小;机器人智能化得到加强,机器人会更加聪明 1.2课程设计的要求 设计一个机器人系统,该机器人可以是轮式、足式、车型、人型,也可以是仿其他生物的,但该机器人应具备的基本功能为:能够灵活行进,能感知光源、转向光源并跟踪光源;另外还应具备一项其他功能,该功能可自选(如亮灯、按钮启动、红外接近停止等)。 具体要求如下: 1、根据功能要求进行机械构型设计,并用实训套件搭建实物。 2、基于实训套件选定满足功能要求的传感器; 3、设计追光策略及运动步态; 4、用NorthStar设计完整的机器人追光程序; 5、调试; 6、完成课程设计说明书,内容:方案设计、硬件搭建过程(附照片)、控制 算法流程、程序编写、调试结果、心得体会。