
机器人视觉识别技术简介
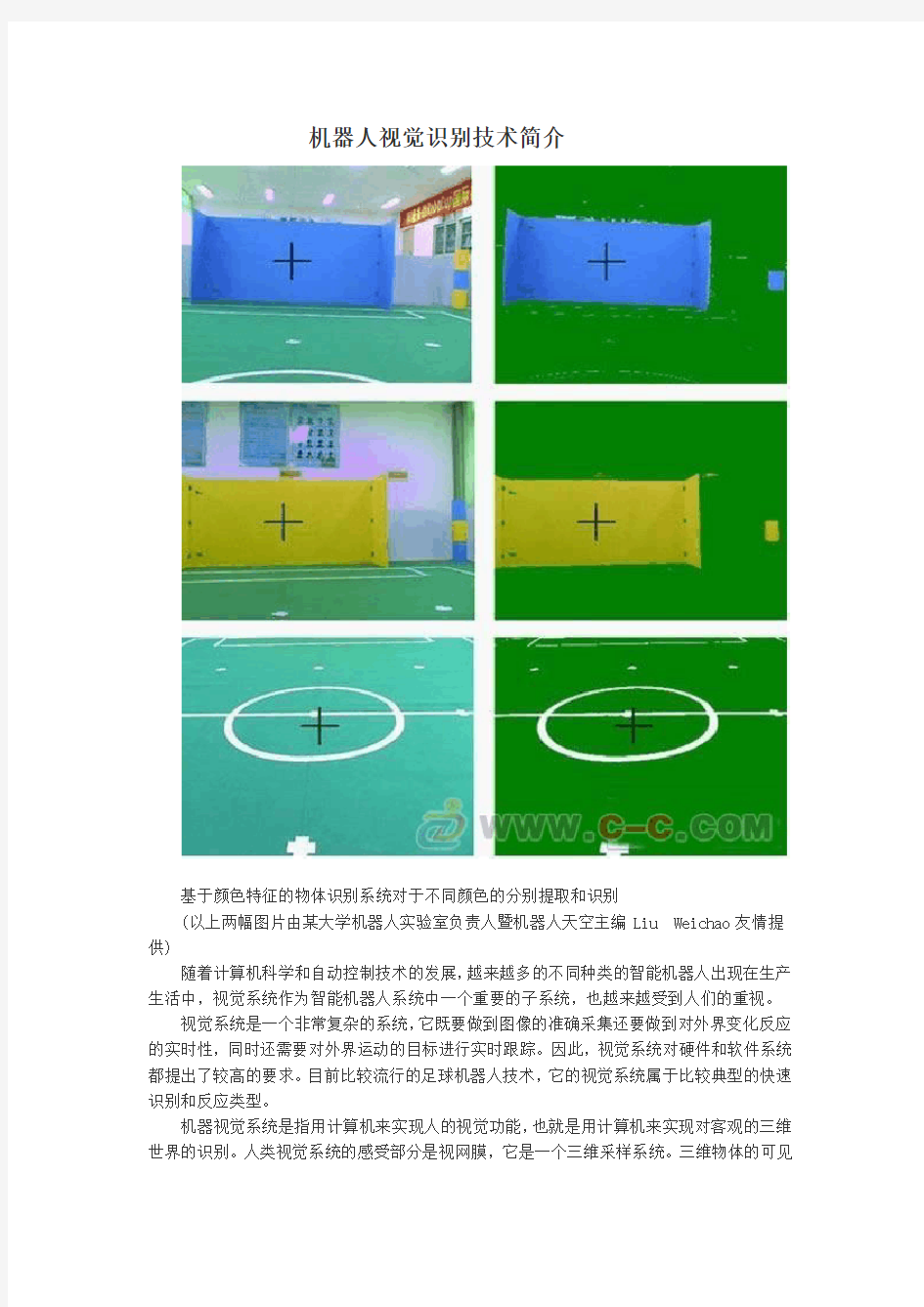
基于颜色特征的物体识别系统对于不同颜色的分别提取和识别
(以上两幅图片由某大学机器人实验室负责人暨机器人天空主编Liu Weichao友情提供)
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在生产生活中,视觉系统作为智能机器人系统中一个重要的子系统,也越来越受到人们的重视。
视觉系统是一个非常复杂的系统,它既要做到图像的准确采集还要做到对外界变化反应的实时性,同时还需要对外界运动的目标进行实时跟踪。因此,视觉系统对硬件和软件系统都提出了较高的要求。目前比较流行的足球机器人技术,它的视觉系统属于比较典型的快速识别和反应类型。
机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。人类视觉系统的感受部分是视网膜,它是一个三维采样系统。三维物体的可见
部分投影到网膜上,人们按照投影到视网膜上的二维的像来对该物体进行三维理解(对被观察对象的形状、尺寸、离开观察点的距离、质地和运动特征等的理解)。
机器视觉系统的输入装置可以是摄像机、转鼓等,它们都把三维的影像作为输入源,即输入计算机的就是三维管观世界的二维投影。如果把三维客观世界到二维投影像看作是一种正变换的话,则机器视觉系统所要做的是从这种二维投影图像到三维客观世界的逆变换,也就是根据这种二维投影图像去重建三维的客观世界。
机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示。图像的获取实际上是将被测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据,它主要由三部分组成:照明,图像聚焦形成,图像确定和形成摄像机输出信号。视觉信息的处理技术主要依赖于图像处理方法,它包括图像增强、数据编码和传输、平滑、边缘锐化、分割、特征抽取、图像识别与理解等内容。经过这些处理后,输出图像的质量得到相当程度的改善,既改善了图像的视觉效果,又便于计算机对图像进行分析、处理和识别。
机器人视觉系统主要是利用颜色、形状等信息来识别环境目标。以机器人对颜色的识别为例:当摄像头获得彩色图像以后,机器人上的嵌入计算机系统将模拟视频信号数字化,将像素根据颜色分成两部分:感兴趣的像素(搜索的目标颜色)和不感兴趣的像素(背景颜色)。然后,对这些感兴趣的像素进行RGB 颜色分量的匹配。为了减少环境光强度的影响,可把RGB颜色域空间转化到HIS颜色空间。
在足球机器人的彩色视觉系统中,程序是根据贴在机器人小车顶上的色标来识别机器人是属于哪一队,以及是几号队员的。由于在每个机器人小车顶上有两种颜色的色标,分别是队标和队员标。因此,识别工作的第一步是把图像中的每一个像素,根据颜色分类到一组离散的色彩类中。
颜色分类常用的方法有线性色彩阈值法、最近邻域法和阈值向量法等。
其中,线性色彩阈值法是用线性平面把色彩空间分割开来,其阈值的确定可采用直接取阈值和通过自动训练来获取目标颜色范围等方法,也可以采用神经网络和多参数决策树方法来进行自学习,以获得合适的阈值;而用最近邻域分类法分割图像时,则利用隶属度函数,即根据最大的隶属度来判断这个颜色属于哪个类;阈值向量法是先使用一组事先确定的阈值向量来把色彩值在色彩空间中的位置来判断其属于哪种颜色。
在色彩分类之后,必须对各个颜色类的点进行处理,最终辨识出场上的各个敌我队员和球在场上的位置和方向角。识别时,通常的做法是对分类后的像素进行一次扫描,即将相邻的同种颜色的像素连成色块。
基于阈值向量的颜色识别
一、色彩空间选择
对于采用基于彩色图像分割的方法识别目标时,首先要选择合适的颜色空间,常用的颜色空间有RGB、YUV、HSV、CMY等。颜色空间的选择直接影响到图像分割和目标识别的效果。
RGB——最常用的颜色空间,其中亮度等于R、G、B3个分量之和。RGB颜色空间是不均匀的颜色空间,两个颜色之间的知觉差异与空间中两点间的欧氏距离不成线性比例,而且R、G、B值之间的相关性很高,对同一颜色属性,在不同条件(光源种类、强度和物体反射特性)下,RGB值很分散,对于识别某种特定颜色,很难确定其阈值和其在颜色空间中的分布范围。因此通常会选择能从中分离出亮度分量的颜色空间,其中最常见的是YUV和HSV颜色空间。
HSV——接近人眼感知色彩的方式,H为色调(Hue),S为色饱和度(Saturation),V为亮度(Value)。色调H能准确地反映颜色种类,对外界光照条件变化敏感度低,但是H和S
均为R、G、B的非线性变换,存在奇异点,在奇异点附近即使R、G、B的值有很小变化也引起变换值有很大的跳动。
YUV——RGB颜色空间线性变化为亮度色彩空间。是为了解决彩色电视机与黑白电视机的兼容问题而提出的。Y表示亮度(Luminance),UV用来表示色差(Chrominance)。YUV表示法的重要性是它的亮度信号(Y)和色度信号(U、V)是相互独立的。所谓色差是指基色信号中的3个分量信号(即R、G、B)与亮度信号之差。
YUV格式与RGB存在如下关系:
二、阈值确定和色彩判断
在确定阈值时,首先通过采集样本进行训练,从而得到预定的几种颜色在YUV空间的分量的上下阈值,如图2所示。
当一个待判定的像素在色彩空间中的位置落在这个长方体中时,就认为该像素属于要找的颜色,从而完成对图像颜色的识别。在Y空间中,Y值表示亮度,因它的变化很大,所以只考虑了U和V的值,在进行颜色判断时,首先分别建立U、V的阈值向量。
在颜色识别后进行图像分割,在图像分割中采用了种子填充算法,其整个种子的填充是和像素点的颜色同时进行的,一开始不是对所有的像素进行处理,而是分块进行的。当中心点是所
要识别的颜色时,就以这个点为种子向四周扩散,并判定周围像素点的颜色,直到填满整个块。
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
智能机器人的语音识别 语音识别概述 最近,由于其重大的理论意义和实用价值,语音识别已经受到越来越多的关注。到现在为止,多数的语音识别是基于传统的线性系统理论,例如隐马尔可夫模型和动态时间规整技术。随着语音识别的深度研究,研究者发现,语音信号是一个复杂的非线性过程,如果语音识别研究想要获得突破,那么就必须引进非线性系统理论方法。最近,随着非线性系统理论的发展,如人工神经网络,混沌与分形,可能应用这些理论到语音识别中。因此,本文的研究是在神经网络和混沌与分形理论的基础上介绍了语音识别的过程。 语音识别可以划分为独立发声式和非独立发声式两种。非独立发声式是指发音模式是由单个人来进行训练,其对训练人命令的识别速度很快,但它对与其他人的指令识别速度很慢,或者不能识别。独立发声式是指其发音模式是由不同年龄,不同性别,不同地域的人来进行训练,它能识别一个群体的指令。一般地,由于用户不需要操作训练,独立发声式系统得到了更广泛的应用。所以,在独立发声式系统中,从语音信号中提取语音特征是语音识别系统的一个基本问题。 语音识别包括训练和识别,我们可以把它看做一种模式化的识别任务。通常地,语音信号可以看作为一段通过隐马尔可夫模型来表征的时间序列。通过这些特征提取,语音信号被转化为特征向量并把它作为一种意见,在训练程序中,这些意见将反馈到HMM的模型参数估计中。这些参数包括意见和他们响应状态所对应的概率密度函数,状态间的转移概率,等等。经过参数估计以后,这个已训练模式就可以应用到识别任务当中。输入信号将会被确认为造成词,其精确度是可以评估的。整个过程如图一所示。 图1 语音识别系统的模块图
3、理论与方法 从语音信号中进行独立扬声器的特征提取是语音识别系统中的一个基本问题。解决这个问题的最流行方法是应用线性预测倒谱系数和Mel频率倒谱系数。这两种方法都是基于一种假设的线形程序,该假设认为说话者所拥有的语音特性是由于声道共振造成的。这些信号特征构成了语音信号最基本的光谱结构。然而,在语音信号中,这些非线形信息不容易被当前的特征提取逻辑方法所提取,所以我们使用分型维数来测量非线形语音扰动。 本文利用传统的LPCC和非线性多尺度分形维数特征提取研究并实现语音识别系统。 3.1线性预测倒谱系数 线性预测系数是一个我们在做语音的线形预分析时得到的参数,它是关于毗邻语音样本间特征联系的参数。线形预分析正式基于以下几个概念建立起来的,即一个语音样本可以通过一些以前的样本的线形组合来快速地估计,根据真实语音样本在确切的分析框架(短时间内的)和预测样本之间的差别的最小平方原则,最后会确认出唯一的一组预测系数。 LPC可以用来估计语音信号的倒谱。在语音信号的短时倒谱分析中,这是一种特殊的处理方法。信道模型的系统函数可以通过如下的线形预分析来得到: 其中p代表线形预测命令,,(k=1,2,… …,p)代表预测参数,脉冲响应用 h(n)来表示,假设h(n)的倒谱是。那么(1)式可以扩展为(2)式: 将(1)带入(2),两边同时,(2)变成(3)。 就获得了方程(4):
机器人视觉(Robot Vision)简介 机器视觉系统的组成 机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。按现在的理解,人类视觉系统的感受部分是视网膜,它是一个三维采样系统。三维物体的可见部分投影到网膜上,人们按照投影到视网膜上的二维的像来对该物体进行三维理解。所谓三维理解是指对被观察对象的形状、尺寸、离开观察点的距离、质地和运动特征(方向和速度)等的理解。 机器视觉系统的输入装置可以是摄像机、转鼓等,它们都把三维的影像作为输入源,即输入计算机的就是三维管观世界的二维投影。如果把三维客观世界到二维投影像看作是一种正变换的话,则机器视觉系统所要做的是从这种二维投影图像到三维客观世界的逆变换,也就是根据这种二维投影图像去重建三维的客观世界。 机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示。 将近80%的工业视觉系统主要用在检测方面,包括用于提高生产效率、控制生产过程中的产品质量、采集产品数据等。产品的分类和选择也集成于检测功能中。下面通过一个用于生产线上的单摄像机视觉系统,说明系统的组成及功能。 视觉系统检测生产线上的产品,决定产品是否符合质量要求,并根据结果,产生相应的信号输入上位机。图像获取设备包括光源、摄像机等;图像处理设备包括相应的软件和硬件系统;输出设备是与制造过程相连的有关系统,包括过程控制器和报警装置等。数据传输到计算机,进行分析和产品控制,若发现不合格品,则报警器告警,并将其排除出生产线。机器视觉的结果是CAQ系统的质量信息来源,也可以和CIMS其它系统集成。 图像的获取 图像的获取实际上是将被测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据,它主要由三部分组成: *照明 *图像聚焦形成 *图像确定和形成摄像机输出信号
《机器人技术》课程项目智能涂胶避障装配多功能机器人 姓名:尤振民、李明 胡强强、布贺宁 指导教师:姚建涛、李艳文、刘宝华 2014年10月
智能涂胶避障装配多功能机器人 摘要 机器人技术是一个集环境感知、轨迹规划、机械手应用等功能于一体的机电一体化系统。它是集中了计算机、机构学、传感技术、电子技术、人工智能及自动控制等多科而形成的高新技术。本次课程设计的装配机器人智能小车就是这种高新技术综合体的一种尝试。装配机器人智能小车主要由机械系统,环境识别系统,运动控制系统及机械臂控制系统组成。小车以单片机为核心,附以外围电路,采用光电检测器进行检测故障和循迹,并用软件控制小车及机械臂的运动,从而实现小车的自动行驶、转弯、寻迹检测、避障、停止及装配等功能的智能控制系统。 机器人技术基础系统地介绍了机器人的基础理论和关键技术。主要内容包括:机器人的机构、位姿描述和齐次变换、操作臂运动学、操作臂的雅可比、操作臂动力学、轨迹规划、操作臂的控制、机器人语言和离线编程等。本书反映了机器人在规划、控制和编程方面近期所取得的成果。此外,书中还附有习题和编程练习。 主要的项目分工情况如下:尤振民:机械手三维图形的制作及动画仿真 李明:资料收集,机械手臂编程及调试 胡强强:机械手臂的尺寸设计,轨迹规划 布贺宁:机械手臂方案论证,项目报告,PPT a)比赛场地
目录 1前言 ....................................... 2设计方案的确定.............................. 3参数确定 ................................... 3.1机械手臂的设计...................................................... 3.2 位移分析................................. 3.3 机械手爪设计......................................................... 4工作空间分析................................ 4.1 运动学正解............................................................. 4.2 运动学反解............................................................. 5速度分析 ................................... 6轨迹规划 ................................... 7项目总结 ................................... 8心得体会 ................................... 9参考文献 ...................................
带有视觉识别模块的分拣机器人 传统的机器人分拣操作一般采用示教或离线编程方式,当机器人所处的工作环境发生改变时机器人很难即时作出相应的调整,为了使机器人具有更加智能化的功能,以阿童木并联机器人和工业智能相机为基础,组成一套带有视觉模块的机器人分拣系统。这样的分拣系统结合了并联型机器人和视觉模块两个方面的优势,通过视觉模块智能的识别不同的对象,系统可以完成高速的分拣工作,显著提升了机器人对工作环境的适应能力,提高了工作效率。同时,实验结果证明了该系统软硬件设计正确,分拣成功率高。 随着我们国家生产需求的不断增加,机器人越来越多的参与到各行各业的生产过程中来。其中,对工件的分拣作业是当前生产过程中的一个重要环节,传统的机器人分拣,其动作和目标的摆放位置都需要根据程序预先严格的设定。一旦机器人所处的环境有所改变,很容易导致抓取错误。本文模拟工业生产中的分拣作业环境,引入视觉模块,用摄像机来模拟人类的视觉功能来对待测的对象进行识别分类,可以使分拣作业拥有更高的可靠性和灵活性,作业对象以及分拣工序可以随时随地的变换,也提高了工作的效率和机器人的智能化程度。 1机器人系统组成介绍 我们设计的机器人分拣系统主要由并联机器人、视觉模块、传送带装置以及分拣对象组成,结构如图1所示: 1.1并联机器人 相比于其他工业机器人,并联机器人占用较小的空间,其更具有高速度、高精度、灵活性等特点,更能適合苛刻的工业生产需求。我们在实验中采用的是阿童木4轴并联型机器人,如图2所示,它能够完成空间中X、Y、Z方向的移动及角度的转动。除了并联型机器人本体之外,机器人配套设施还包括机器人控制柜、控制编程器和驱动机器人各关节运动的伺服交流电机。机器人末端执行机构为气动吸盘,用于吸附传送带上的分拣对象,完成抓取动作。 1.2 视觉模块 视觉模块我们采用康奈视公司的In-Sight7000型智能相机,如图3所示。该视觉模块能够智能的识别出实验中不同种类的实验对象,以及采集各个实验对象的位置信息。 1.3网络交换机 实验中,我们使用一般的家用路由器来替代网络交换机。视觉模块采集到的信息要通过局域网来络传递给机器人,因此我们要用到网络交换机来搭建局域网络,进而使各个模块间完成信息传输。
绿化植树机器人设计 摘要: 这个机器人是针对大量绿色植树而设计的,利用机械四足作为其活动方式,机器人通过视频识别系统在有限范围内对地形与植被作出判断,然后通过自动行走系统移动到目标地点前面,再通过机械手取出携带的植物幼苗,通过这个可以360度旋转的机械臂进行种植工作,机械臂可以进行种植、培土、等工作。种植完成后还将用一层可分解的塑料薄膜覆盖植物幼苗,保证其在能够自行成长前的安全。 关键词: 绿化植树、四足行走、山坡作业、视频识别、机械臂操作 设计背景: 地球现在正面临着绿色植被在不断减少的危机,而人类也因为这样要面对日益严峻的环境问题。大量植树还原绿色植被是一个相当重要的手段来解决这个难题,但是依靠人力去做的话,效率始终不够高。所以在这里我想设计一个专门用于大作业量的绿化植树机器人。 设计思路: 这个机器人,是需要面对山坡这样的陡峭地形的,由于特殊的使用环境,机器人的活动方式要求能够灵活的应对颠簸不平的土地,机械四足需要能够根据不同的地势调整四足的高度,确保平稳的行走,这种活动方式才能使机器人轻松到达山崖大部分位置。移动起来必须十分的轻巧,以避免对其他植物的伤害。由于这个机器人对视频识别有着较高的要求,所以必须在这方面有所突破,同时当发现有杂草或者有害植物的时候,还可以通过高温蒸汽将其杀死,来保证种植的植物幼苗的生长。360度旋转的机械臂可以保证种植过程的顺利进行。 详细具体设计方案: 一.整体结构: 1.整个机器人分成上下两大部分,上部分是机械手臂,主要实现机器人的整个种植 操作,下部是机器人的机身和四足,包括:植物幼苗存放仓、红外线距离测量 仪、摄像头、电脑处理系统。 2.机器人是通过电力驱动的,所以必须携带储电池,也是安装在机身。 二.中央处理系统: 机器人的机身将安装一个中央处理系统,作为机器人的大脑,它主要调节机器人三 大系统:机械四足行走系统、机器人视觉系统、机械臂控制系统。中央处理系统要 接收和分析红外线距离测量仪、摄像头、机械臂传感器等反馈信息,以及控制四足 的行进系统、机械臂操作等。 三.机械四足行走系统: 1.机械四足的形状: 一开始的时候,我曾经很困惑于如何把握行走稳定与行走速度之间的平衡,后来设 想出仿人类四肢的关节加上圆形的脚盘这个方案,总体感觉可以满足行走的需要。 2.如何实现行进: 参考了机械小狗的设计,将机械四足连接在机器人的中央处理系统而成为一个整 体,接受中央处理系统的控制。每次改变一个机械足的位置,实现整个机器人的行
开放实验项目报告 项目名称:语音识别机器人 专业 学生姓名 班级学号 指导教师 指导单位 2012/2013学年第一学期 一.设计背景
在科学日新月异的今天,电子设备的便捷化,人性化,智能化已成为不可逆转的潮流,而语音控制智能,更是其中研究发展的热点。凌阳SPCE061以其便捷的操作,可靠的性能,成为了各位电子爱好者的首选。本实验采用凌阳61板和运动小车(迷你型)模组设计的语音控制小车。凌阳板嵌入小车模型顶部。语音处理技术不仅包括语音的录制和播放,还涉及语音的压缩编码和解码、语音的识别等各种处理技术。本设计的语音控制小车,借助于SPCE061A在语音处理方面的特色,不仅具有前进、后退、左转、右转、停止等基本程序控制功能,而且还具备语音控制功能。 二.总流程图
三.主要模块 1、凌阳SPCE061是继μ’nSP?系列产品SPCE500A等之后凌阳科技推出的又一款16 位结构的微控制器。与SPCE500A不同的是,在存储器资源方面考虑到用户的较少资源的需求以及便于程序调试等功能,SPCE061A里只内嵌32K字的闪存(FLASH )。较高的处理速度使μ’nSP?能够非常容易地、快速地处理复杂的数字信号。因此,与SPCE500A相比,以μ’nSP?为核心的SPCE061A 微控制器是适用于数字语音识别应用领域产品的一种最经济的选择。 其性能如下: A、16 位μ’nSP?微处理器; B、工作电压(CPU) VDD 为2.4~3.6V (I/O) VDDH 为2.4~5.5V C、CPU 时钟:0.32MHz~49.152MHz ; D、内置2K 字SRAM; E、内置32K FLASH; F、可编程音频处理; G、晶体振荡器; H、系统处于备用状态下(时钟处于停止状态),耗电仅为2μA@3.6V ; I、2 个16 位可编程定时器/计数器(可自动预置初始计数值); J、2 个10 位DAC(数-模转换)输出通道; K、32 位通用可编程输入/输出端口; L、14 个中断源可来自定时器A / B ,时基,2 个外部时钟源输入,键唤醒;
1.什么是机器视觉 【概述】 机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和 CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。 正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。【基本构造】 一个典型的工业机器视觉系统包括:光源、镜头、 CCD 照相机、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯 / 输入输出单元等。 系统可再分为: 主端电脑(Host Computer) 影像撷取卡(Frame Grabber)与影像处理器影像摄影机 CCTV镜头显微镜头照明设备: Halogen光源 LED光源 高周波萤光灯源闪光灯源其他特殊光源影像显示器 LCD 机构及控制系统 PLC、PC-Base控制器 精密桌台伺服运动机台 【工作原理】 机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格 / 不合格、有 / 无等,实现自动识别功能。 【机器视觉系统的典型结构】 一个典型的机器视觉系统包括以下五大块: 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。光源可分为可见光和不可见光。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。 2.镜头FOV(Field Of Vision)=所需分辨率*亚象素*相机尺寸/PRTM(零件测量公差比)镜头选择应注意: ①焦距②目标高度③影像高度④放大倍数⑤影像至目标的距离⑥中心点 / 节点⑦畸变 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD和面阵CCD;单色相机和彩色相机。 4.图像采集卡 图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等等。 比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理。有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。 5.视觉处理器 视觉处理器集采集卡与处理器于一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务。现在由于采集
智能机器人设计报告 参赛者:庆东肖荣于腾飞 班级:级应用电子技术 指导老师:远明 日期:年月日 一、元器件清单: ,,,,,,,蜂鸣器,光敏电阻,光敏三极管,电阻、电容若干,超亮及普通发光管。二、主要功能: 本设计按要求制作了一个简易智能电动车,它能实现的功能是:从起跑线出发,沿引导线到达点。在此期间检测到铺设在白纸下的薄铁片,并实时存储、显示在“直道区”检测到的薄铁片数目。电动车到达点以后进入“弯道区”,沿圆弧引导线到达点继续行驶,在光源的引导下,利用轻触开关传来的电信号通过障碍区进入停车区并到达车库,完成上述任务后能够立即停车,全程行驶时间越少越好。 本寻迹小车是以有机玻璃为车架,单片机为控制核心,加以减速电机、光电传感器、光敏三极管、轻触开关和电源电路以及其他电路构成。系统由通过口控制小车的前进后退以及转向。寻迹由超亮发光二极管及光敏电阻完成,避障由轻触开关完成,寻光由光敏三极管完成。 并附加其他功能: .声控启动 .数码显示 .声光报警 三、主体设计 车体设计 左右两轮分别驱动,后万向轮转向的方案。为了防止小车重心的偏移,后万向轮起支撑作用。对于车架材料的选择,我们经过比较选择了有机玻璃。用有机玻璃做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。而且裁减比较方便! 电机的固定采用的是铝薄片加螺丝固定,非常牢固,且比较美观。 轮子方案 在选定电机后,我们做了一个万向轮,万向轮的高度减去电机的半径就是驱动轮的半径。轮子用有机玻璃裁出来打磨光华的,上面在套上自行车里胎,以防止打滑。 万向轮 当小车前进时,左右两驱动轮与后万向轮形成了三点结构,这种结构使得小车在前进时比较平稳。
万方数据
万方数据
万方数据
万方数据
基于双目视觉的工业机器人运动轨迹准确度检测 作者:岁波, 都东, 陈强, 孙振国, 韩翔宇 作者单位:清华大学机械工程系,北京,100084 刊名: 机械工程学报 英文刊名:CHINESE JOURNAL OF MECHANICAL ENGINEERING 年,卷(期):2003,39(5) 被引用次数:13次 参考文献(5条) 1.Yuan Jing;Yu S L End-effector position-orientation measurement[外文期刊] 1999(03) 2.Bijan Shimzadeh Laser-interferometry-based tracking for dynamic measurement[外文期刊] 1998(01) 3.McNamee L P;Petriu E M;Spoelder H J W Photogrammetric calibration of a mobile robot model[外文会议] 2001(01) 4.Van Albada G D Low-cost pose-measuring system for robot calibration[外文期刊] 1995(03) 5.Janocha H;Diewald B New methods of measuring and calibrating robots 1995 本文读者也读过(4条) 1.刘常杰.杨学友.邾继贵.叶声华.LIU Chang-jie.YANG Xue-you.ZHU Ji-gui.YE Sheng-hua基于工业机器人白车身柔性坐标测量系统研究[期刊论文]-光电子·激光2006,17(2) 2.谭冠政.徐雄.肖宏峰.TAN Guan-Zheng.XU Xiong.XIAO Hong-feng工业机器人实时高精度路径跟踪与轨迹规划[期刊论文]-中南大学学报(自然科学版)2005,36(1) 3.陈伟.钟健面向工业机器人系统的三种可靠度配置策略的研究[期刊论文]-光学精密工程2002,10(2) 4.黄晨华.张铁.谢存禧工业机器人位姿误差建模与仿真[期刊论文]-华南理工大学学报(自然科学版) 2009,37(8) 引证文献(16条) 1.李召鑫.李海峰.郑臻荣.刘旭立体视觉测量系统的空间分辨力和结构参数设置[期刊论文]-光电工程 2012(1) 2.张娅丽.刘波.解周凯.王晓白空中目标姿态测量中的图像处理方法[期刊论文]-科学技术与工程 2010(10) 3.郑魁敬.王连峰双目主动视觉监测平台设计[期刊论文]-计算机集成制造系统 2010(4) 4.张娅丽.刘波.解周凯.王晓白基于投影匹配的目标姿态测量方法研究[期刊论文]-传感技术学报 2010(6) 5.崔彦平.葛杏卫.张洪亮机械零件直线边缘亚像素定位方法研究[期刊论文]-半导体光电 2010(5) 6.基于双目视觉的飞行目标落地速度测量方法研究[期刊论文]-传感器与微系统 2009(8) 7.崔彦平.葛杏卫基于双目视觉的空间直线重建方法研究[期刊论文]-半导体光电 2009(6) 8.王健强.吕游一种面向工业机器人智能抓取的视觉引导技术研究[期刊论文]-机械设计与制造 2009(9) 9.宗光华.邓鲁华.王巍基于激光扫描的移动机器人实时轨迹测量系统[期刊论文]-航空学报 2007(4) 10.崔彦平.林玉池.黄银国双目视觉飞行目标落地参数测量[期刊论文]-光电工程 2007(8) 11.傅其凤.崔彦平.葛杏卫空间轴对称目标三维姿态测量方法的研究[期刊论文]-传感器与微系统 2007(3) 12.崔彦平.林玉池.黄银国回转体目标空间三维姿态测量方法研究[期刊论文]-传感技术学报 2007(1) 13.孙洪淋机器人视觉伺服系统的自适应模糊控制方法研究[学位论文]硕士 2006 14.刘苏宜.王国荣.钟继光视觉系统在机器人焊接中的应用与展望[期刊论文]-机械科学与技术 2005(11) 15.张国贤.陈强.张文增.汤晓华宏-微机器人微动机构研制[期刊论文]-焊接学报 2005(12)
毕业论文(设计) 题目语音识别机器人的设计 系部电子信息工程 专业电子信息工程年级 06级学生姓名 学号 指导教师 语音识别机器人的设计
【摘要】语音识别可划分为训练和识别两个过程。在第一阶段,语音识别系统对人类的语言进行学习,把学习内容组成语音库存储起来,在第二阶段就可以把当前输入的语音在语音库中查找相应的词义或语义。凌阳16位SPCE061A单片机内嵌32K字闪存,2K字SRAM,内置10位ADC、DAC,有多达14个的中断源。它的CPU内核采用16位具有DSP功能的微处理器芯片, 而且CPU可最高工作在49MHz的主频下,能够非常容易地、快速地处理复杂的数字信号,因此与其他类型的单片机相比,在数字语音处理方面SPCE061A更具有优势。基于SPCE061A设计了一个具有语音识别功能的机器人。经过训练,训练人可使用各种命令让机器人完成许多有趣的动作,使得人机交互更具智能化。 【关键词】SPCE061A单片机语音识别机器人
The Design of the Speech Recognition Robot 【Abstract】The speech recognition is divided into two stages, namely, training and recognition. At the first stage, the speech recognition system learns about the language and stores what it a speech database. Then at the next stage, the meaning of each inputted speech can immediately be found in the speech database.Sunplus 16-bit SPCE061ASCM is embedded with 32K word Flash and 2K word SRAM, with built-in 10-bit ADC and DAC as well as more than 14 interrupt sources. The core of its CPU is a 16-bit microprocessor chip which of DSP. Besides, the CPU can work with a frequency up to 49 MHz, and process complex digital signals easily and quickly. Therefore, compared with other types of SCM, SPCE061A speech processing. Based on SPCE061A, a speech recognition robot designed. After training, the robot can complete many interesting actions according to the orders, which makes the -computer interaction more intelligent. 【Key words】SPCE061A SCM Speech Recognition Robot 目录
机器人课程设计报 告
智能机器人课程设计 总结报告 姓名: 组员: 指导老师: 时间:
一、课程设计设计目的 了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于实践。经过学习,具体掌握智能机器人的控制技术,并使机器人能独立执行一定的任务。 基本要求:要求设计一个能走迷宫(迷宫为立体迷宫)的机器人。要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。要有走迷宫的策略(软件流程图)。对于走迷宫小车控制系统设计主要有几个方面:控制电路设计,传感器选择以及安放位置设计,程序设计 二、总体方案 2.1 机器人的寻路算法选择 将迷宫看成一个m*n的网络,机器人经过传感器反馈的信息感知迷宫的形状,并将各个节点的与周围节点的联通性信息存储于存储器中,再根据已经构建好的地图搜索离开迷宫的路径。这里可选择回溯算法。对每个网格从左到右,每个网格具有4个方向,分别定义。并规定机器人行进过程中不停探测前方是否有障碍物,同时探测时按左侧规则,进入新网格后优先探测当前方向的左侧方向。探测过程中记录每个网格的四个方向上的状态:通路、不通或未知,探测得到不同状态后记记录,同时记录当前网
格的四个方向是否已被探测过。若某网格四个方向全部探测过则利用标志位表示该网格已访问。为了寻找到从起点到终点的最佳路径,记录当前网格在四个方向上的邻接网格序号,由此最后可在机器人已探测过的网格中利用Dijkstra算法找到最佳路径。并为计算方便,记录网格所在迷宫中行号、列号。并机器人探索过程中设置一个回溯网格栈记录机器人经过的迷宫网格序号及方向,此方向是从一个迷宫网格到下一个迷宫网格经过的方向。设置一个方向队列记录机器人在某网格内探测方向的顺序。设置一个回溯路径数组记录需要回溯时从回溯起点到回溯终点的迷宫网格序号及方向。 考虑到迷宫比较简单,且主要为纵横方向的直线,可采用让小车在路口始终左转或者始终右转的方法走迷宫,也就是让小车沿迷宫的边沿走。这样最终也能走出迷宫。本次课程设计采用此方法。即控制策略为机器人左侧有缺口时,向左进入缺口,当机器人前方有障碍是,向右旋转180°,其余情况保持前进。 2.2 传感器的选择 由于需要检测机器人左侧和前方是否有通路,采用红外传感器对机器人行进方向和左侧进行感知。红外避障传感器是依据红外线的反射来工作的。当遇到障碍物时,发出的红外线被反射面反射回来,被传感器接收到,信号输出引脚就会给出低电平提示信号。本机器人系统的红外避障信号采用直接检测的方式进行,直接读取引脚电平。传感器感应障碍物的距离阈值能够经过调节
深度解析智能语音机器人的常见问题 一般智能语音机器人会自动处理以下问题:语音识别、语义分析、智能交互,实现对话交互策略。人工辅助过于复杂或者必须通过人工干预的通话转交给对应技能座席。今天我们一起来了解下深度解析电话机器人的常见问题。 一、什么是智能语音机器人? 智能语音机器人是一种运用于电话营销领域的电话机器人,它是通过ASR(语音识别)和TTS(文本转录音)模拟真人和用户通话,可以真人预先录音,用户很难察觉到是机器人。 二、市面上ASR接口有哪些? 智能语音机器人主要ASR接口供应商有科大讯飞,百度语音识别,阿里云语音识别,腾讯语音识别等,有SDK/API/MRCP类接口。智能语音机器人采用的是在讯飞研究院科学家研制的*版语音识别引擎,能精准识别反映客户意愿的词汇,快速划分非意向与意向,语音识别率达到了95%,不误判客户意向,避免浪费您的宝贵号码资源、浪费人力跟进非意向客户,同时对环境噪音、客户口音均有良好的适应能力。 三、智能语音机器人由哪些部分组成? 语音识别引擎≠电销机器人,语音识别能力是电销机器人重要的组成,但并非*,智能语音机器人还需要将呼叫平台(保证呼叫稳定)、电话线路、话术体系、操作后台集成在云端,达到直接在web上登陆操作目的,至此可以理解为一台“汽车”的硬件造好了。 但是汽车的性能怎么样,还需要检测关键技术指标、跑几下(各种测试),配置上软件(电销机器人的话术还没有配好)。因此,用讯飞技术≠智能语音机器人,如果用**技术就等于**牌子,那么所有的电脑都应该叫intel英特尔电脑,还有戴尔、联想什么事。
四、智能语音机器人为什么按路收费? 一个智能语音机器人研发好了,理论上可以支持N路并发(开一个接口就是一个机器人),主要的瓶颈是语音识别。免费的ASR一般*几万次,量大是需要付费使用的。一个智能语音机器人对接一路识别语音引擎(向ASR公司付费)、对应一条外呼线路(通信运营商向你收取),因此按路收费。有了这些机器人才能听懂话、打出去电话。 五、智能语音机器人话术系统是怎样一回事? 做话术≠做录音,如果没有对客户说话的正确理解,只是播放录音,没有互动,体验怎么能好。智能语音机器人建立在数据的基础上,智能语音机器人话术定制涉及到机器人语言设计、知识库的丰富,方便机器人理解,同时经过大量测试,保证准确理解客户的回复。 总结 智能语音机器人对于销售工作的开展无疑是提高效率的,工具虽然好,但也要了解怎么使用,更要知道正确使用的方向。
机器人视觉系统 ——人脸识别技术 优势 1 不被察觉,不会引起人的反感。 2 非接触性,不需要和设备接触即可识别 3 自然性 4 准确,可靠,灵活。 原理 在检测到人脸并定位面部关键特征点之后,主要的人脸区域就可以被裁剪出来,经过预处理之后,馈入后端的识别算法。识别算法要完成人脸特征的提取,并与库存的已知人脸进行比对,完成最终的分类。 主要过程 一般分三步: (1)首先建立人脸的面像档案。即用摄像机采集单位人员的人脸的面像文件或取他们的照片形成面像文件,并将这些面像文件生成面纹(Faceprint)编码贮存起来。 (2)获取当前的人体面像。即用摄像机捕捉的当前出入人员的面像,或取照片输入,并将当前的面像文件生成面纹编码。(智械科技) (3)用当前的面纹编码与档案库存的比对。即将当前的面像的面纹编码与档案库存中的面纹编码进行检索比对。上述的“面纹编码”方式是根据人脸脸部的本质特征和开头来工作的。这种面纹编码可以抵抗光线、皮肤色调、面部毛发、发型、眼镜、表情和姿态的变化,具有强大的可靠性,从而使它可以从百万人中精确地辩认出某个人。人脸的识别过程,利用普通的图像处理设备就能自动、连续、实时地完成。 实现方法 基于OpenCv人脸识别设计方案 1 系统组成 以OpenCV 图像处理库为基础,利用库中提供的相关功能函数进行各种处理:通过相机对图像数据进行采集,人脸检测主要是调用已训练好的Haar 分类器来对采集的图像进行模
式匹配,检测结果利用PCA 算法可进行人脸图像训练与身份识别,而人脸表情识别则利用了Camshift 跟踪算法和Lucas–Kanade 光流算法。
上海应用技术学院Shanghai Institute of Technology 组长:王文博 组员:严格,熊祚强 指导教师:周文 项目工期:2014年6月10日——2015年6月15日
摘要:本项目研发智能家庭监督机器人是基于智能手机平台之下所应用的, 在借助于ug三维建模设计,机械设计以传动设计,及嵌入式硬件的插入,成功地实现了人远距离分身控制并监督家庭情况,能够随时随地掌握家庭环境的变化,为家庭安全的保障提供了基础,并且解决了目前市场家政机器人价格昂贵的现象。 前言: 随着物联网,智能家居以及智能手机的兴起,针对国内的市场环境, 本项目研发出的一系列四款智能家庭服务机器人,本项目研发的机器人管家是一种远程交互型机器人家政机器人采用低功耗WIFI技术连接互联网及手机终端通过强大智能手机及网络云服务器的数据计算处理能力对机器人进行智能化控制,从而降低了机器人的所需硬件成本,使得家政机器人能被国内消费者所接受。此机器人装配了红外,433射频的家电控制系统,实现了远程家电控制功能,并解决了目前智能家居家电设备接口协议不统一,传统家电难以兼容的问题。此外,机器人本身留有各种传感器接口,通过采用本项目研发的红外热式,温湿度,甲醛以及PM2.5传感器机器人能够实现远程家庭环境监控,家居安防的功能。能够解决目前家庭服务类机器人依赖进口,售价高昂的市场现状。 正文:(建模方面)
如上图所示,主观三视图,以及大致轮廓视图,外观视图上采取了全新的外观设计,底部以正六棱柱作为底座,并且采用抽壳技术,扩大内部空间,方便内部嵌入传动系统,机械设计等等,并且为以后的硬件电子设施提供了空间基础,上部采用圆弧拉伸,同样扩大内部空间,便于齿轮,马达等传动设施插入,放手机的补位,采用加盖模式,内部设有弹簧等设施,加紧设备。具体如下: 一:底轮 底轮采用一般的轮胎设计,圆弧效果便于运动,轮胎表面加拉伸效果,增加抓地,增大摩擦,内部增加五角星设计,省材料, 增加美观 二:转向轮: 由于底面为正六棱柱,两个轮子不能稳定行走,并且转向不方便,故在底面加上两个可以自由旋转的转向轮,转向轮 采用平常滑板上的轮子,这样的轮,自由性比较大,可以随 意转向,而传统的车轮,自由性较低,两者互相结合,既可 以自由转向,又可以稳抓底面。建模设计上主要采用了草图 拉伸方式。 三:滚轴:
项目一认识机器视觉系统 任务一连接视觉系统的周边设备 活动一连接相机 活动二连接光源 活动三连接手柄 活动四连接电源 活动五连接显示器 任务二调节相机 活动一调节相机 任务三调节光源 活动二调节光源 活动三操作手柄 任务三运行视觉软件 活动一运行软件 活动二修改语言 活动三创建一个新设定 任务四运行视觉系统的仿真 活动一安装软件 活动二注册图像 活动三运行仿真 任务五基恩士视觉与机器人通讯连接活动一确定本机通讯方式 活动二选择通讯方式 活动三通讯线安装 活动四连接通讯线 任务六基恩士与机器人通讯软件设置活动一进入通讯设置界面 活动二选择正确的通讯数据 活动三通讯测试 项目二基恩士视觉识别颜色
任务一进入新的设置 活动一创建新的设定窗口 活动二进入相机设定 活动三注册图像 任务二识别颜色的窗口设定 活动一设定前的准备 活动二设定检测范围 活动三设定判断值 活动四条件设定 任务三输出设置 活动一选择通讯方式 活动二设置判断值 任务四机器人控制概述 活动一机器人视觉控制指令运行 活动二机器人运行控制指令运行 活动三机器人运行控制编程 任务五整体编程运行 活动一两种颜色中确定所选颜色 活动二三种颜色中确定所选颜色 活动三四种颜色中确定两种所选的颜色项目三基恩士视觉识别大小 任务一进入新的设置 活动一创建新的设定窗口 活动二进入相机设定 活动三注册图像 任务二识别大小的窗口设定 活动一设定前的准备 活动二设定检测范围 活动三设定判断值 活动四条件设定
任务三输出设置 活动一选择通讯方式 活动二设置判断值 任务四在仿真中识别图像大小设置 活动一建立识别图像大小的仿真 活动二设置识别大小的仿真 活动三思考与原机的区别 任务五整体编程运行 活动一两种大小不同的工件进行选择 活动二三种不同大小的工件进行选择 活动三两种不同大小不同颜色的工件进行选择活动四三种不同大小不同颜色的工件进行选择项目四基恩士视觉识别形状 任务一进入新的设置 活动一创建新的设定窗口 活动二进入相机设定 活动三注册图像 任务二识别形状的窗口设定 活动一设定前的准备 活动二设定检测范围 活动三设定测量值 活动四条件设定 任务三输出设置 活动一选择通讯方式 活动二设置测量值 任务四机器人控制概述 活动一机器人视觉控制指令运行 活动二机器人运行控制指令运行 活动三机器人运行控制编程 任务五整体编程运行