激光雷达扫描系统
激光雷达扫描系统可以实时、动态、大量采集空间点云信息。根据用户不同应用需求可以选择不同的载体平台(机载、车载),可快速获取高密度、高精度的激光雷达点云数据。
硬件设备
激光雷达系统可搭载多种类型扫描仪,包括RiegI, Op tech, MDL, Velod yne
等,同时集成GPS、IMU和自主研发的控制平台。
激光雷达扫描系统设备参数见表格1:
三维激光雷达扫描仪长距扫描仪
中距扫描仪短距扫描仪
扫描距离920m 500m 70m
扫描精度1cm 15cm 2cm
飞行速度20-60km/h 20-60km/h 20 -60km/h
扫描角度330°360°360°
每秒发射激光点数50万 3.6万70万
扫描仪重量 3.85kg 4.65kg 1kg
配备我公司自主研发的Li-Air数据处理系统
进行重新标
图1扫描仪、GPS、IMU、控制平台
图3固定翼无人机激光雷达系统
设备检校
定,以保证所采集数据的精度。
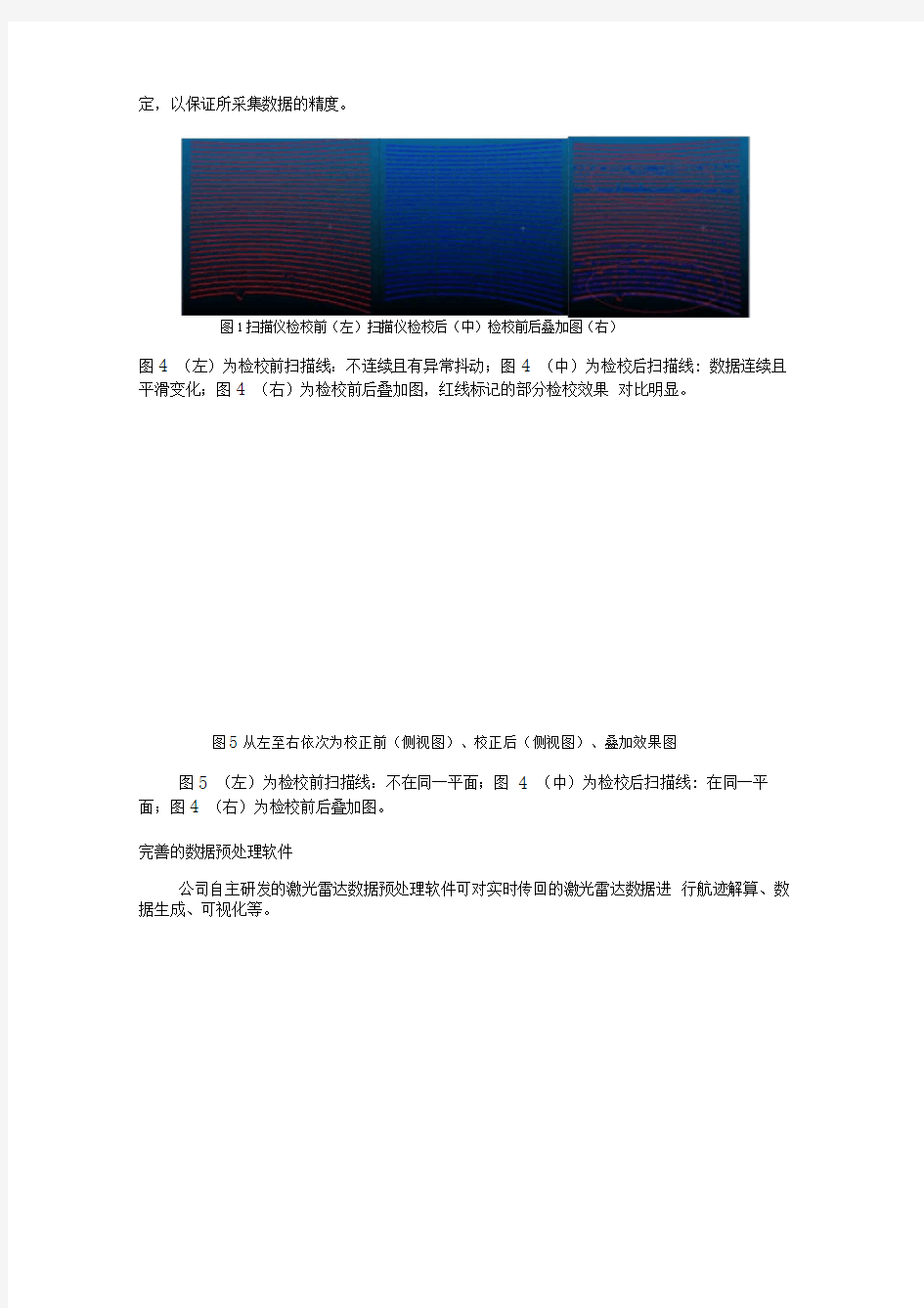
图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右)
图4 (左)为检校前扫描线:不连续且有异常抖动;图4 (中)为检校后扫描线: 数据连续且平滑变化;图4 (右)为检校前后叠加图,红线标记的部分检校效果对比明显。
图5从左至右依次为校正前(侧视图)、校正后(侧视图)、叠加效果图
图5 (左)为检校前扫描线:不在同一平面;图4 (中)为检校后扫描线: 在同一平面;图4 (右)为检校前后叠加图。
完善的数据预处理软件
公司自主研发的激光雷达数据预处理软件可对实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。
Li-VelodjTA
成功案例
2014年7
月,本公司利用Li-Air 无人机激光雷达扫描系统进行中关村软件 200m ,点
云密度 完成对点云和影
沁 Li-Air
园园区扫描项目,采集园区高清点云以及影像数据。飞行高度 约50点/平方米,影像地面分辨率为5cm 。通过POS 数据解算, 像数据的整合,得到地形信息和 DOM 等。 图8软件园项目航迹信息:航迹规划图(左)
图7 Li-Air 数据预处理功能
T
1■'L?
■「U* nm'*w om?'.'fl ma-?.Lw nm"
17*
1 *[
I ?
?I
l-iu
Qrtflsi',
ii4
*
t-=E—} ;实际航迹(右)。
,-■:: J ■ .11 L■"■'■--.1 I ■. ?7 -? ST 1 V . .iLii I il'-
h
L-.--
■ 呷監巴
'、曲辿址*1心恥-0
■峯秤;
倉+屮」芈
IL
2 S
仪
■I 1L .L., 瓠 心性它y 蒯0
舄“.頁嶺y
I" - ...........
■■ ■■!:;:计讪富和■
V 通%; <■ ..
■”" . AL. .11 '-■ n .'
"L-X
£ 匸,』J-”: /:%鶯才 ■'為邃
P - %?:% 宇
”强£
...
异J ;乜;
iif
I
衢pa 即
a 疼心
I
、
電# "2
:i A? w
(左) ;无人机影像(右)
L ■!?|;
宇、
图10无人机激光雷达点云数据
应用领域 无人机激光雷达系统作为新兴的遥感技术,其数据可以应用于; 1)森林参
数估计;2)道路网络提取;3)高精地形生成;4)房屋模型提取;5)海岸线制 图;6)国土资源调查;7)工程建筑测量;8)电力巡线;9)灾害评估等方面。
Li-Air无人机激光雷达扫描系统 Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。 硬件设备 Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl, Optech, MDL, Velodyne等,同时集成GPS、IMU和自主研发的控制平台。 图1扫描仪、GPS、IMU、控制平台 无人机激光雷达扫描系统设备参数见表格1: 表格 1 Li-Air无人机激光雷达扫描系统 图2 八旋翼无人机激光雷达系统图3 固定翼无人机激光雷达系统 设备检校
公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。 图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右) 图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显。 图5从左至右依次为校正前(侧视图)、校正后(侧视图)、叠加效果图图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。 成熟的飞控团队 公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间。
图6无人机激光雷达系统以及影像系统 完善的数据预处理软件 公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。 图7 Li-Air数据预处理功能 成功案例 2014年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。飞行高度200m,点云密度约50点/平方米,影像地面分辨率为5cm。通过POS数据解算,完成对点云和影像数据的整合,得到地形信息和DOM等。
无人机激光雷达无居民海岛地形地貌测绘 测量方案 *** ***
目录 一、概述 (4) 1.1 工程名称 (4) 1.2 测量时间 (4) 1.3 测量原理 (4) 1.4 测量范围及测量内容 (5) 1.4.1 测量范围 (5) 1.4.2 测量内容 (6) 1.5 管理体系 (6) 1.6 测绘资源配备 (6) 1.6.1 人员配置 (6) 1.6.2 设备配置 (6) 1.6.3软件配置 (7) 1.6.3 交通配置 (7) 1.6.4 主要设备性能参数 (7) 1.6.4.1轴多旋翼参数 (7) 1.6.4.2激光雷达性能参数 (8) 1.6.4.3 IMU性能参数 (9) 二、无人机激光雷达测量依据及设计原则 (10) 2.1 无人机激光雷达测量依据 (10) 2.2 设计原则 (11) 三、无人机激光雷达测量设计 (11) 3.1 测量技术要求 (11) 3.1.1 平面坐标系 (11) 3.1.2 高程系统 (11) 3.1.3 点云密度 (12) 3.1.4 点云数据高程精度要求 (12) 3.1.5 飞行天气、场地、高度、速度要求 (12) 3.1.6 其他要求 (12) 3.2 地面GPS基站架设 (12) 3.3 任务航线设计 (13) 3.3.1 检校场设计 (13) 3.3.1.2 检校场地面控制点布设及测量要求 (14) 3.3.2 航线设计 (14) 3.4 磁罗盘的校准 (15) 3.5 无人机的实验性飞行 (16) 3.6 无人机搭载设备后的检查 (16) 3.7 无人机作业前的“8”字飞行(IMU累计误差的消除) (18) 3.8 无人机的正常飞行(航线飞行) (19) 四、内业处理 (20) 4.1 数据准备 (20) 4.1.1 原始数据下载 (20) 4.1.2 POS数据解算 (20)
无人机机载激光雷达系统航带拼接方法研究刘向伟 发表时间:2018-03-01T14:00:21.743Z 来源:《基层建设》2017年第33期作者:刘向伟付云龙冯元春 [导读] 摘要:为了减少机载激光雷达(激光雷达)系统的系统误差和随机误差引起的三维(3d)之间的空间地带偏差,提高数据精度,选择基于数据驱动的“六参数”地带的调整方法,实现无人机机载激光雷达系统的拼接。 天津市津典工程勘测有限公司天津 300222 摘要:为了减少机载激光雷达(激光雷达)系统的系统误差和随机误差引起的三维(3d)之间的空间地带偏差,提高数据精度,选择基于数据驱动的“六参数”地带的调整方法,实现无人机机载激光雷达系统的拼接。本文针对大面积更多地带INSAR(干涉合成孔径雷达)图像定位和拼接问题缺乏地面控制点,并提出了一个联合定位条INSAR成像方法。该方法在摄影测量光束调整思想的方法,并使用INSAR干扰图像上每个点高程值的选择。分析了控制点的数量,位置,重叠区域,地形起伏的影响调整精度,并给出控制点布的原则。 关键词:激光光学;激光雷达;航带平差 1前言 机载激光雷达系统集激光测距技术、计算机技术和高精度的惯性导航和高精度动态定位技术,可以直接与高密度,高精度三维(3d)空间点云,更智能和自动数据采集和处理,已在测绘领域的广泛关注。但由于激光雷达系统是由全球定位系统(GPS)和惯性导航系统(INS)和扫描仪,和复杂的多传感器集成系统的其他部分,其精度是影响常见系统内的部分。 2平差模型及平差方法 2.1数学模型 “距离-多普勒”方程组是严密的构像模型,它符合INSAR成像机理。因此,本文研究内容都是基于该模型而展开的。“距离-多普勒”方程组为: 式中,(XS0,YS0,ZS0)是飞机的起始位置;(VX,VY,VZ)是飞机的速度;(ax,aY,az)是飞机的加速度;DS0为近距点斜距;mx为距离向分辨率;fd为多普勒中心频率;Prf是脉冲重复频率。DSO、mx、fd、prf为已知参数。经运动补偿后,飞机的航迹是作匀速直线运动的,因此,式(3)中可以省略二次项,则待求定位参数为XS0,YS0,ZS0,VX,VY,VZ。 1.2平差方法 光束法是精度最高的区域网平差方法。本文借鉴光束法的思想,利用距离多普勒方程建立飞机位置、像点坐标、地面点坐标之间的关系。使用泰勒公式对式(1)、式(2)线性化得到误差方程:
34 | 电子制作 2018年8月 超声波模块和距离报警模块,其中光流传感器及激光雷达装置,负责主要的定位和探测障碍物的功能。而超声波模块作为辅助,通过使用超声波代替激光,弥补在某些特定环境下激光失能时作为替代设备。 图1 控制集成电路板图 激光雷达如图2所示,使用360度全平面扫描型雷达, 扫描频率10Hz,采样频率8000次/秒,高达18米的探测 距离,足以应付一般室内定位的要求。 图2 激光雷达探测 激光雷达系统使用经典的三角测距算法来计算环境距离如图3所示,距离d=s·f/x/tan(beta)。 2 组合导航在提升导航系统的冗余度和精度方面,组合导航具有明 显的优势,依托传感器提供的互补信息来完成这一过程。针对任何一种组合导航系统,无论是采用的何种配置(惯性导 航、卫星导航、雷达、摄像机、多普勒测速仪、高度计等传基础。 图3 经典的三角测距算法事实上,在组合导航系统需求的引导下,组合导航的EKF 应运而生。在近几十年的发展中,非线性滤波在该行业取得了众人瞩目的成绩,更加领先的非线性滤波器在组合导航系统的信息融合策略中也逐步渗透其中,成为发展的趋势。依据含噪声的观测量,通过在线估计方法计算出系统的隐含状态,是滤波的最终目的。经过半个世界的快速发展,工程界和统计学界将非线性滤波作为重要的研究课题一直在继续。基于局部线性化(一阶 Taylor 级数展开)的EKF 是当前应用最广的方法。目前,众多的学科和工程领域都已离不开EKF 技术,获得了人们的高度青睐。虽然具有众多的应用优势,但是EKF 的收敛性在目前看来缺少可操作的理论证明。为了更好的克服EKF 的该弱点, Uhlmann 和Julier 共同指出,“对概率分布进行近似要比对非线性函数进行近似容易的多”,并针对该问题提出了更深入的研究结论即 Unscented 卡尔曼滤波器(Unscented Kalman Filter,UKF)。基于随机服从高斯分布的前提下,排除针对系统模型的假设,即EKF 不要求系统的近似线性。UKF 不需要计算 Jacobian 导数矩阵,甚至可以应用于不连续统。 UKF 的变形也可以在一定程度上放松高斯分布的假设。可以证明:UKF 的理论估计精度优于 EKF。本方案使用中值滤波的算法对激光扫描仪数据进行处
机载激光雷达选择参考 目前市场上销售的机载激光雷达来自多个厂家,有多种品牌和种类。那么,如何从中选择技术先进、性价比好、故障少又售后服务完善的设备呢? 一、机载激光雷达系统生产厂家介绍 目前提供机载激光雷达设备的厂家主要有:徕卡、Optech(加拿大)、IGI、天宝、TopEye和Riegl。 这些厂家的特点是什么呢? (a)自己生产机载激光扫描仪,然后购买其他厂家的GPS/IMU及硬件和软件,集成机载激光雷达。这类厂家有徕卡,Optech(加拿大),Topeye(瑞典)和Riegl(奥地利)。 在这些生产激光扫描仪的厂家中,生产规模最大的和研究能力最强的是Riegl公司,他向许多厂家提供了一系列产品,如: LMS-Q系列机载激光扫描仪:LMS-Q240, LMS-Q280, LMS-Q120i,LMS-Q160(超轻型,防摔型,无人机专用)等。 新型的具备数字化全波形数据获取和实时处理能力的VQ系列机载激光扫描仪:VQ180, VQ280, VQ480,LMS-Q560和VQ680i等。 目前,徕卡只生产一种激光扫描仪,而其他厂家也大多只生产两款机载激光扫描仪作为自己的系统集成使用。Optech虽然能够生产具备数字化全波形数据的激光扫描仪,但不是标准配置,用户需要另外付费。但即便如此,也已经落后Riegl公司六年。 这里还要指出的是:徕卡公司在2005年前一直使用的是加拿大Applanix POS系统,由于美国的禁运政策,向中国出口的POS系统都进行了许多修改,性能明显下降,并且伴随不稳定的情况。为了保证激光雷达性能的可靠性,徕卡在2004年后测试了许多不同公司(包括Honeywell)的POS系统。在2005年7月又从加拿大TerraMatics公司(1998年成立)购买了其POS系统的IP(知识产权),避开北美区域,由自己(在瑞士)来研发和委托生产型号为iPAS 的POS系统。目前国内所销售的徕卡的ALS50-ii和60系统基本都是配置iPAS定位系统。
基于radar的彩虹无人机避障技术及系统研究 所谓无人机自动避障功能(Obstacle Avoidance),就是无人机飞行器在自动飞行的过程中遇到障碍物的时候,通过自动提前识别、有效规避障碍物,达到安全飞行的效果。 基于航空物探作业(包括航磁及航放测量作业)的航空飞行平台改装,要求飞行器具备良好的低空避障能力,以应对飞行器在超低空飞行时可能遇到的剧烈起伏地形及各种动力线、高压线铁塔、桅杆、天线拉线等小型不可预知障碍物。 目前彩虹系列无人机装备的机载测距仪、传感器均无法做到预先发现危险物并提供障碍物信息。同时,基于视觉的避障策略无法在夜间和恶劣天气条件下为无人机避障提供帮助。为保证彩虹系列无人机飞行平台在物探等超低空作业中的飞行安全,研制装备高效可行的自主避障系统显得尤为迫切。 一、避障设备选型 1.微波雷达 传统意义上应用于雷达系统的电磁波,以工作频率划分为若干的波段,由低到高的顺序是:高频(HF)、甚高频(VHF)、超高频(UHF)、L波段、S波段、C波段、X波段、Ku波段、K波段和Ka波段等。非相控阵单雷达条件下,高频(短波长)的波段一般定位更准确,但作用范围短;低频(长波)的波段作用范围远,发现目标距离大。 表1雷达频段划分 米波的频率范围在300MHz–3GHz,主要用于通讯和电视广播; 厘米波的频率范围在3GHz–30GHz,主要用于雷达、卫星通讯,无线电导航; 毫米波的频率范围在30GHz–300GHz,用于卫星通讯。 雷达波段(radar frequency band)指雷达发射电波的频率范围。其度量单位是赫兹(Hz)或周/秒(C/s)。大多数雷达工作在超短波及微波波段,其频率范围在30~300000兆赫,相应波长为10米至1毫米,包括甚高频(VHF)、特高频(UHF)、超高频(SHF)、极高频(EHF)4个波段。在1GHz频率以下,由于通信和电视等占用频道,频谱拥挤,一般雷达较少采用,只有少数远程雷达和超视距雷达采用这一频段。高于15吉赫频率时,空气水分子吸收严重;高于30吉赫时,大气吸收急剧增大,雷达设备加工困难,接收机内部噪声增大,只有少数毫米波雷达工作在这一频段。 在实际应用中,选用的电磁波频率越高,其穿透性越差,空间损耗(大气中水蒸气和氧造成的损耗)越大,但精度会更高;反之,相对低频的电磁波(例如微波)在空气中损耗较低,发射和接收角度大,且传输距离远,在军事和民用发面得到广泛应用。
激光雷达扫描系统 激光雷达扫描系统可以实时、动态、大量采集空间点云信息。根据用户不同应用需求可以选择不同的载体平台(机载、车载),可快速获取高密度、高精度的激光雷达点云数据。 硬件设备 激光雷达系统可搭载多种类型扫描仪,包括RiegI, Op tech, MDL, Velod yne 等,同时集成GPS、IMU和自主研发的控制平台。 激光雷达扫描系统设备参数见表格1: 三维激光雷达扫描仪长距扫描仪 中距扫描仪短距扫描仪 扫描距离920m 500m 70m 扫描精度1cm 15cm 2cm 飞行速度20-60km/h 20-60km/h 20 -60km/h 扫描角度330°360°360° 每秒发射激光点数50万 3.6万70万 扫描仪重量 3.85kg 4.65kg 1kg 配备我公司自主研发的Li-Air数据处理系统 进行重新标 图1扫描仪、GPS、IMU、控制平台 图3固定翼无人机激光雷达系统 设备检校
定,以保证所采集数据的精度。 图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右) 图4 (左)为检校前扫描线:不连续且有异常抖动;图4 (中)为检校后扫描线: 数据连续且平滑变化;图4 (右)为检校前后叠加图,红线标记的部分检校效果对比明显。 图5从左至右依次为校正前(侧视图)、校正后(侧视图)、叠加效果图 图5 (左)为检校前扫描线:不在同一平面;图4 (中)为检校后扫描线: 在同一平面;图4 (右)为检校前后叠加图。 完善的数据预处理软件 公司自主研发的激光雷达数据预处理软件可对实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。