22
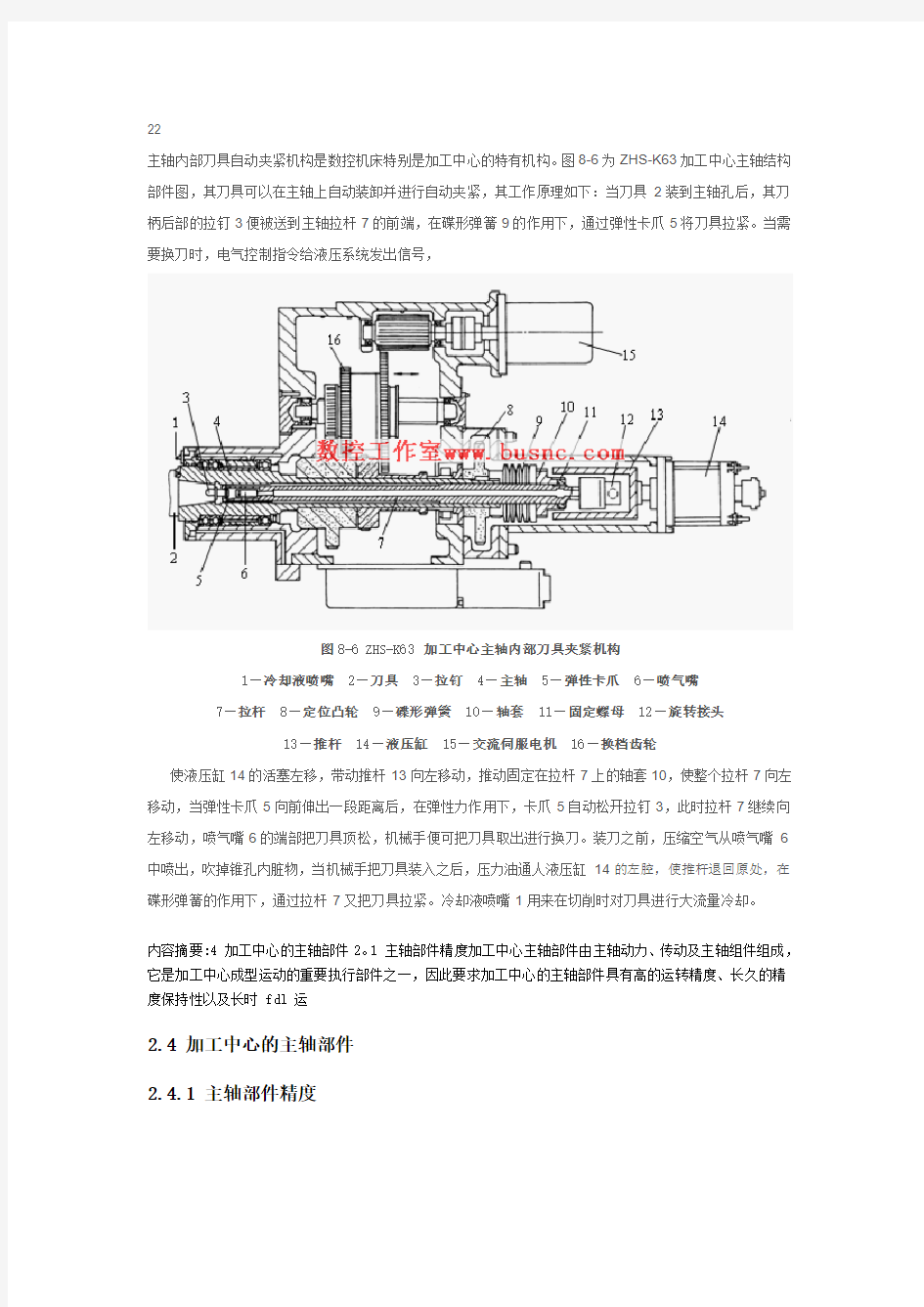
主轴内部刀具自动夹紧机构是数控机床特别是加工中心的特有机构。图8-6为ZHS-K63加工中心主轴结构部件图,其刀具可以在主轴上自动装卸并进行自动夹紧,其工作原理如下:当刀具2装到主轴孔后,其刀柄后部的拉钉3便被送到主轴拉杆7的前端,在碟形弹簧9的作用下,通过弹性卡爪5将刀具拉紧。当需要换刀时,电气控制指令给液压系统发出信号,
图8-6 ZHS-K63加工中心主轴内部刀具夹紧机构
1—冷却液喷嘴2—刀具3—拉钉4—主轴5—弹性卡爪6—喷气嘴
7—拉杆8—定位凸轮9—碟形弹簧10—轴套11—固定螺母12—旋转接头
13—推杆14—液压缸15—交流伺服电机16—换档齿轮
使液压缸14的活塞左移,带动推杆13向左移动,推动固定在拉杆7上的轴套10,使整个拉杆7向左移动,当弹性卡爪5向前伸出一段距离后,在弹性力作用下,卡爪5自动松开拉钉3,此时拉杆7继续向左移动,喷气嘴6的端部把刀具顶松,机械手便可把刀具取出进行换刀。装刀之前,压缩空气从喷气嘴6中喷出,吹掉锥孔内脏物,当机械手把刀具装入之后,压力油通人液压缸14的左腔,使推杆退回原处,在碟形弹簧的作用下,通过拉杆7又把刀具拉紧。冷却液喷嘴1用来在切削时对刀具进行大流量冷却。
内容摘要:4 加工中心的主轴部件2。1 主轴部件精度加工中心主轴部件由主轴动力、传动及主轴组件组成,它是加工中心成型运动的重要执行部件之一,因此要求加工中心的主轴部件具有高的运转精度、长久的精度保持性以及长时 fdl 运
2.4 加工中心的主轴部件
2.4.1 主轴部件精度
加工中心主轴部件由主轴动力、传动及主轴组件组成,它是加工中心成型运动的重要执行部件之一,因此要求加工中心的主轴部件具有高的运转精度、长久的精度保持性以及长时 fdl 运行的精度稳定性。
加工中心通常作为精密机床使用,主轴部件的运转精度决定了机床加工精度的高低.考核机床的运转精度一般有动态检验和静态检验两种方法。静态检验是指在低速或手动转动主轴情况下,检验主轴部件各个定位面及工作表面的跳动量.动态检验则需使用一定的仪器在机床主轴额定转速下.采用非接触的检测方法检验主轴的回转精度。由于加工中心通常具有自动换刀功能,刀具通过专用刀柄由安装在加工中心主轴内部的拉紧机构紧固.因此主轴的回转精度要考虑由于刀柄定位面的加工误差所引起的误差。
加工中心主轴轴承通常使用C级轴承,在二支承主轴部件中多采用4-1、2-2组合使用,即前支承和后支承分别用四个向心推力轴承和一个向心球轴承,或前、后支承都使用两个向心推力轴承组成主轴部件的支承体系.对于轻型高精度加工中心,也有前、后支承各使用一个向心推力轴承组成主轴部件的支承体系,该种结构适宜高精度、高速主轴部件的场合.简单的主轴轴承组合,可以大大降低主轴部件的装配误差和热传导引起的主轴隙丧失,但主轴的承载能力会有较大幅度的下降.
2.4.2 主轴部件结构
主轴部件主要由主轴、轴承、传动件、密封件和刀具自动卡紧机构等组成
⑴ 主轴
主轴前端有7:24的锥孔.用于装夹BT40刀柄或刀杆.主轴端面有一瑞面键.既可通过它传递刀具的扭矩,又可用于刀具的周向定位.主轴的主要尺寸参数包括:主轴的直径、内孔直径、悬伸长度和支承跨距。评价和考虑主轴主要尺寸参数的依据是主轴的刚度、结构
上艺性和主轴组件的工艺适用范围.主轴材料的选择主要根据刚度、载荷特点、耐磨性和热处理变形大小等因素确定。主轴材料常采用的有 45 钢、 Gcr15 等,需经渗氮和感应加热悴火.
加下中心的主轴支承形式很多.其中立式加工中心的主轴前支承采用四个向心推力球轴承,后支承采用一个向.心球轴承,这种支承结构使主轴的承载能力较高.且能适应高速的要求.主轴支承前端定位,主轴受热向后伸长,能较好地满足精度需要.只是支承结构较为复杂。
⑵ 刀具自动卡紧机构
加工中心可以白动换刀,所以,主轴系统应具备自动松开和夹紧刀具的功能。刀具的自动夹紧机构安装在主轴的内部,图2一7所示为刀具的夹紧状态.刀柄1由主轴抓刀爪2 央持,碟形弹簧5通过拉杆4、抓刀爪 2 ,在内套 3 的作用下将刀栖的拉钉拉紧,当换刀时,要求松开刀柄.此时将主轴上端气缸的上腔通
压缩空气,活塞7带动压杆8及拉4向下移动.同时压缩碟形弹簧5,当拉杆4下移到使抓刀爪2的下端移出内套3时.卡爪张开.同时拉杆4将刀柄顶松,刀其即可由机械手或刀库拔出。待新刀装入后,气缸6的下腔通压缩空气.在碟形弹簧的作用下.活塞带动抓刀爪上移.抓刀爪拉杆贯新进人内套3 ,将刀柄拉紧。活塞7移动的两个极限位置分别设有行程开关10,作为刀具夹紧和松开的信号.
刀杆尾部的拉紧机构,除上述的卡爪式外,常见的还有钢球拉紧机构,其内部结构如图2一8所示。
液压卡盘主要体现在卡爪夹紧或者张开时使用到液压油缸的推力或者压力.比较常见的有弹簧夹,薄膜卡盘和快速夹具(滑爪卡盘).弹簧夹头通过金属材料本身的
弹性来达到夹紧(或张开),反之通过油缸的推拉来实现张开(夹紧).
薄膜卡盘在盘齿类零件的内孔加工里最常见,它通过拉杆来推开金属膜片使之变形,而装在膜片上的卡爪也随之微量张开,当拉杆不作用于膜片上,膜片恢复原形,
卡爪不张开,卡盘处于夹紧状态.
滑爪卡盘就是把卡爪装在一个有斜度的座上,当油缸拉杆后拉会使卡爪一边后移一边直径方向缩小,这样就达到了夹紧的目的.现在市场上有比较完整的液压卡
盘,类似滑爪卡盘的,好象都比较贵,十寸的要8000多块.台湾千岛精密的.
一般液压卡盘装第一个零件前都要卡爪自磨(夹紧量小,大调整必须手动调整卡爪离卡盘中心的距离,或者直接更换卡爪)
液压夹紧轴套
一种新型附件自动夹紧机构的设计 我们在设计一种新型数控落地加工中心时.用户要求增加自动上附件功能由于主机方滑枕截面尺寸小,可利用空间有限,而附件夹紧所需夹紧力大,为此,我们设计了一种新型的附件自动夹紧机构。这种夹紧机构是利用斜面机构的力放大原理实现的。经过多年用户生产实践证明,这种机构达到了预期的效果,满足了加工的需要。 1 结构及工作原理 需夹紧附件时,夹紧油路加压,推动活塞7向左移动(楔块8应做成三瓣以上)。这样,在活塞7的推动下,楔块8向下移动,推动拉钉11、夹爪6(应做成两瓣以上)向右运动,锁紧附件的拉钉5,实现附件自动夹紧功能。需松开附件时,松开油路加压,迫使活塞7、楔块8及拉钉11作相反运动,致使夹爪6张开,实现附件的松开。 在夹紧、松开过程中,楔块8起着至关重要的作用,它的设计合理与否,将直接关系到该机构成功与否。在设计时应特别注意。 楔块放大图
2 楔块的设计 如图,假设楔块与活塞之间的夹角为a,楔块与拉钉之间接触面的倾斜角为b。这两个角度的大小将直接影响夹紧机构的性能,设计时需要特别注意。 设计a角时,希望a越小越好.这样夹紧油路只需提供很小的压力就可以在楔块8上产生非常大的正压力。但由于夹爪夹紧、张开所需行程的限制,a不可能选得太小,而必须大于自锁角。 设计b角时,则希望它越大越好,这样只需很小的正压力就可以产生很大的轴向拉力。但如果b角太大,拉紧夹爪的行程势必很大,这样就不能产生反程自锁。所以,在设计此楔块时,应在满足夹紧力和空间允许的情况下,使松开和夹紧油路的压力尽可能一致。 另外,楔块首先要整体加工,楔块与定位套之间、楔块与拉钉之间、楔块与活塞之间的接触面要充分研磨,然后平均分成3瓣,确保有效密封,避免压力损失。同时,楔块要选择强度高、韧胜好、耐磨性强的合金材料。 这种附件自动夹紧机构与其它结构形式相比具有以下优点:(1)夹紧安全、可靠、快速;(2)结构简单、紧凑,占用空间小;(3)夹紧、松开所需油压小、而产生的夹紧力十分大;(4)拆卸维修十分方便(通过锁紧螺母2,就可以将其方便地从主机方滑枕前端拆下来)。
第3章工件定位与夹紧 一.简答题: 3-1.工件在夹具中定位、夹紧的任务是什么? 定位:把工件装好,就是在机床上使工件相对于刀具及机床有正确的位上加工置。工件只有在这个位置上接受加工,才能保证被加工表面达到所要求的各项技术教育要求。 夹紧:把工件夹牢,就是指定位好的工件,在加工过程中不会受切削力、离心力、冲击、振动等外力的影响而变动位置。 3-2.一批工件在夹具中定位的目的是什么?它与一个工件在加工时的定位有何不同? 3-3.何谓重得定位与欠定位?重复定位在哪些情况下不允许出现?欠定位产生的后果是什么? 欠定位:按照加工要求应该限制的自由度没有被限制的定位称为欠定位。欠定位是不允许的。因为欠定位保证不了加工要求。 重复定位:工件的一个或几个自由度被不同的定位元件重复限制的定位称为过定位。当过定位导致工件或定位元件变形,影响加工精度时,应该严禁采用。但当过定位并不影响加工精度,反而对提高加工精度有利时,也可以采用。 3-4.辅助支承起什么作用?使用应注意什么问题? 生产中,由于工件形状以及夹紧力、切削力、工件重力等原因可能使工件在定位后还产生变形或定位不稳定。常需要设置辅助支承。辅助支承是用来提高工件的支承刚度和稳定性的,起辅助作用,决不允许破坏主要支承的主要定位作用。 各种辅助支承在每次卸下工件后,必须松开,装上工件后再调整和锁紧。 由于采用辅助支承会使夹具结构复杂,操作时间增加,因此当定位基准面精度较高,允许重复定位时,往往用增加固定支承的方法增加支承刚度 3-5.选择定位基准时,应遵循哪些原则? 定位时据以确定工件在夹具中位置的点、线、面称为定位基准。 定位基准有粗基准和精基准之分。零件开始加工时,所有的面均未加工,只能以毛坯面作定位基准,这种以毛坯面为定位基准的,称为粗基准,以后的加工,必须以加工过的表面做定位基准,以加工过表面为定位基准的称精基准。 在加工中,首先使用的是粗基准,但在选样定位基准时,为了保证零件的加工精度,首先考虑的是选择精基准,精基准选定以后,再考虑合理地选择粗基准。 3-6.夹紧装置设计的基本要求是什么?确定夹紧力的方向和作用点的原则有哪些? 夹紧机构应满足下面要求: 1. 夹紧过程中,必须保证定位准确可靠,而不破坏原有的定位。 2. 夹紧力的大小要可靠、适应,既要保证工件在整个加工过程中位置稳定不变、振动小,又要使工件不产生过大的夹紧变形。 3. 夹紧装置的自动化和复杂程度应与生产类型相适应,在保证生产效率的前提下,其结构要力求简单,工艺性好,便于制造和维修。 4. 夹紧装置应具有良好的自锁性能,以保证在源动力波动或消失后,仍能保持夹紧状态。 5. 夹紧装置的操作应当方便、安全、省力。 1. 夹紧力方向的确定原则 夹紧力的作用方向不仅影响加工精度,而且还影响夹紧的实际效果。具体应考虑如下几
22 主轴内部刀具自动夹紧机构是数控机床特别是加工中心的特有机构。图8-6为ZHS-K63加工中心主轴结构部件图,其刀具可以在主轴上自动装卸并进行自动夹紧,其工作原理如下:当刀具2装到主轴孔后,其刀柄后部的拉钉3便被送到主轴拉杆7的前端,在碟形弹簧9的作用下,通过弹性卡爪5将刀具拉紧。当需要换刀时,电气控制指令给液压系统发出信号, 图8-6 ZHS-K63加工中心主轴内部刀具夹紧机构 1—冷却液喷嘴2—刀具3—拉钉4—主轴5—弹性卡爪6—喷气嘴 7—拉杆8—定位凸轮9—碟形弹簧10—轴套11—固定螺母12—旋转接头 13—推杆14—液压缸15—交流伺服电机16—换档齿轮 使液压缸14的活塞左移,带动推杆13向左移动,推动固定在拉杆7上的轴套10,使整个拉杆7向左移动,当弹性卡爪5向前伸出一段距离后,在弹性力作用下,卡爪5自动松开拉钉3,此时拉杆7继续向左移动,喷气嘴6的端部把刀具顶松,机械手便可把刀具取出进行换刀。装刀之前,压缩空气从喷气嘴6中喷出,吹掉锥孔内脏物,当机械手把刀具装入之后,压力油通人液压缸14的左腔,使推杆退回原处,在碟形弹簧的作用下,通过拉杆7又把刀具拉紧。冷却液喷嘴1用来在切削时对刀具进行大流量冷却。 内容摘要:4 加工中心的主轴部件2。1 主轴部件精度加工中心主轴部件由主轴动力、传动及主轴组件组成,它是加工中心成型运动的重要执行部件之一,因此要求加工中心的主轴部件具有高的运转精度、长久的精度保持性以及长时 fdl 运 2.4 加工中心的主轴部件 2.4.1 主轴部件精度
加工中心主轴部件由主轴动力、传动及主轴组件组成,它是加工中心成型运动的重要执行部件之一,因此要求加工中心的主轴部件具有高的运转精度、长久的精度保持性以及长时 fdl 运行的精度稳定性。 加工中心通常作为精密机床使用,主轴部件的运转精度决定了机床加工精度的高低.考核机床的运转精度一般有动态检验和静态检验两种方法。静态检验是指在低速或手动转动主轴情况下,检验主轴部件各个定位面及工作表面的跳动量.动态检验则需使用一定的仪器在机床主轴额定转速下.采用非接触的检测方法检验主轴的回转精度。由于加工中心通常具有自动换刀功能,刀具通过专用刀柄由安装在加工中心主轴内部的拉紧机构紧固.因此主轴的回转精度要考虑由于刀柄定位面的加工误差所引起的误差。 加工中心主轴轴承通常使用C级轴承,在二支承主轴部件中多采用4-1、2-2组合使用,即前支承和后支承分别用四个向心推力轴承和一个向心球轴承,或前、后支承都使用两个向心推力轴承组成主轴部件的支承体系.对于轻型高精度加工中心,也有前、后支承各使用一个向心推力轴承组成主轴部件的支承体系,该种结构适宜高精度、高速主轴部件的场合.简单的主轴轴承组合,可以大大降低主轴部件的装配误差和热传导引起的主轴隙丧失,但主轴的承载能力会有较大幅度的下降. 2.4.2 主轴部件结构 主轴部件主要由主轴、轴承、传动件、密封件和刀具自动卡紧机构等组成 ⑴ 主轴 主轴前端有7:24的锥孔.用于装夹BT40刀柄或刀杆.主轴端面有一瑞面键.既可通过它传递刀具的扭矩,又可用于刀具的周向定位.主轴的主要尺寸参数包括:主轴的直径、内孔直径、悬伸长度和支承跨距。评价和考虑主轴主要尺寸参数的依据是主轴的刚度、结构
铣床夹紧装置液压系统的设计 1.概述 1.1 液压传动的概念与发展 液压传动是以流体(液压油液)为工作介质进行能量传递和控制的一种传动形式。它们通过各种元件组成不同功能的基本回路,再由若干基本回路有机地组合成具有一定控制功能的传动系统。液压传动,是机械设备中发展速度最快的技术之一。特别是近年来,随着机电一体化技术的发展与微电子、计算机技术相结合,液压传动进入了一个新的发展阶段。 液压传动技术是根据帕斯卡提出的液体静压力传动原理而发展起来的一门 的一种传动形式。与机械传动相比,它是一门比较新兴的技术。从1795年英国制成 的液压传动技术和液压元件,且工艺水平低下,发展缓慢。1905 年将工作介质水改为油,进一步得到改善。第一次世界大战(1914-1918)后液压传动广泛应用,特别是 1920 年以后,发展更为迅速。1925年维克斯(F.Vikers)发明了压力平衡式叶片泵,为近代液压元件工业或液压传动的逐步建立奠定了基础。20 世纪初康斯坦丁?尼斯克(G?Constantimsco)对能量波动传递所进行的理论及实际研究;1910 年对液力传动(液力联轴节、液力变矩器等) 域得到了发展[3]。第二次世界大战(1941-1945)期间,在美国机床中有30%应用了液压传动。20世纪60年代以后,工艺水平有了很大的提高,液压技术随着电气控制技术、传感器技术、计算机技术的发展而迅速发展成为包括传动、控制、检测在内的一门完整的自动化技术。在国民经济的各个部门都得到了应用,如工程机械、数控加工中心、冶金自动线等。 如今,流体传动技术水平的高低已成为一个国家工业发展水平的重要标志。历史的经验证明,流控学科技术的发展,仅有20%是靠本学科的科研成果推动,来源于其他领域发明的占50%移植,其他技术成果占30%,即大部分,来源于其他相关学科进步的推动。随着应用了电子技术、计算及技术、信息技术、自动控制技术及新工艺、新材料的发展和应用液压传动技术也在不断创新。液压传动
两种定位夹紧机构工作原理分析 摘要:在生产中,我们时常会遇到需要夹紧工件的情况,对于不同形状的工件,我们需要不同类型的夹紧机构。本文主要介绍两类比较常用的快速夹紧机构,即斜楔式夹紧机构和偏心轮式夹紧机构的受力分析和自锁条件。 关键词:夹紧力;自锁;升角;偏心轮 快速夹紧机构是指以快速简便的动作就能实现对物体施加某种形式的作用力,使之夹紧固定、夹持移位或夹紧制动的机构。①根据其作用,分为定位夹紧机构、夹持位移机构和制动夹紧机构。其中,定位夹紧机构是将工件定位夹紧后,能承受一定的外力作用而不松动的机构。如机床加工夹具和各种测试夹具等。本文介绍的两种快速夹紧机构即为定位夹紧机构。 1.斜块式斜楔夹紧机构(斜楔机构) 1.1受力分析 斜楔夹紧机构的受力图如图1所示,作用力Q推动楔块,顶块沿斜面向上的夹紧力为P,法向力N与沿接触面的摩擦力f合成一个反力R。顶块在Q、P 和R的作用下处于平衡状态,由里的封闭三角形可知,顶块的夹紧力为 式中α———楔块斜面升角 φ———反力R作用线与法向反力N作用线之间的夹角,成为摩擦角。 图1 图2 图3 1.2自锁条件 夹紧后。顶块保持在夹紧状态,楔块不会自动松脱的现象,成为自锁。② 如图2所示,若顶块沿斜面向下相对滑动时,楔块将被推出。这时,P为主动力,Q为支持力,摩擦力f向上。F和法向力N合成反力R。可得 由上式可知,若> ,则Q<0,即力Q的方向与图中所示相反。这时,只要存在力Q就能使楔块松脱。若< ,则力Q与图示相同。这时,顶块对楔块无论多大的反力也不会使楔块自动退出。可见。斜楔夹紧机构的自锁条件是:楔块斜面升角小于摩擦角,即< 。 2.偏心轮式夹紧机构
定位与夹紧 一、定位 (1)分类 l)完全定位 工件的六个自由度全部被夹具中的定位元件所限制,而在夹具中占有完全确定的惟一位置,称为完全定位。 2)不完全定位 根据工件加工表面的不同加工要求,定位支承点的数目可以少于六个。有些自由度对加工要求有影响,有些自由度对加工要求无影响,这种定位情况称为不完全定位。不完全定位是允许的, 3)欠定位 按照加工要求应该限制的自由度没有被限制的定位称为欠定位。欠定位是不允许的。因为欠定位保证不了加工要求。 4)过定位 工件的一个或几个自由度被不同的定位元件重复限制的定位称为过定位。当过定位导致工件或定位元件变形,影响加工精度时,应该严禁采用。但当过定位并不影响加工精度,反而对提高加工精度有利时,也可以采用。各类钳加工和机加工都会用到。 (2)解释 工件定位的实质就是使工件在夹具中占据确定的位置,因此工件的定位问题可转化为在空间直角坐标系中决定刚体坐标位置的问题来讨论。在空间直角坐标系中,刚体具有六个自由度,即沿X、Y、Z轴移动的三个自由度和绕此三轴旋转的三个自由度。用六个合理分布的支承点限制工件的六个自由度,使工件在夹具中占据正确的位置,称为六点定位法则。人们在阐述六点定位法则时常以图1所示铣不通槽的例子来加以说明:a1、a2、a3三个点体现主定位面A,限制X、Y方向的旋转自由度和Z方向的移动自由度;a4、a5两个点体现侧面B,限制X 方向的移动自由度和Z方向的旋转自由度;a6点体现止推面C,限制Y方向的移动自由度。这样,工件的六个自由度全部被限制,称为完全定位。当然,定位只是保证工件在夹具中的位置确定,并不能保证在加工中工件不移动,故还需夹紧。定位和夹紧是两个不同的概念。 二、加紧
工件的装夹和夹紧装置
课题项目:工件的夹紧和夹紧装置 教学目标知识目标 1、掌握基本夹紧机构夹紧力的计算方法; 2、掌握基本夹紧机构自锁条件的确定方法;能力目标 1、掌握斜楔夹紧机构的原理及组成; 2、掌握螺旋夹紧机构的结构及原理; 3、掌握圆偏心夹紧机构的原理。 素质目标 1、培养学生语言表达能力; 2、培养学生自主学习的能力; 3、培养学生团队协作的能力; 4、增强学生的安全意识。 教学重点基本夹紧机构自锁条件的确定方法 教学难点螺旋夹紧机构的结构及原理 课型多媒体授课授课课时2课时 教学过程教学内容教学方 法、手段 师生 活动 时间 分配 导入 根据下图中斜楔夹紧机构的受力分析,来 确定基本夹紧机构夹紧力的计算、自锁条件及 几何特点,是我们本项目所要解决的问题。 情境教 学法 多媒体 1、教师 讲解; 2、学生 听课 5 分 钟 教 学实施告知 1.夹紧装置的组成 1)力源装置力源装置是产生夹紧原始作 用力的动力装置。通常使用的动力装置有气压 装置、液压装置、电动装置、磁力装置等; 2)夹紧机构夹紧机构一般由中间递力机 构和夹紧元件组成。它的作用是传递原始作用 力,改变其大小、方向,使之变为夹紧力,并 执行夹紧工件的任务。 2.夹紧装置的基本要求 1)在夹紧过程中应能保持工件定位时所获 得的正确位置; 2)夹紧应可靠和适当; 3)夹紧装置应操作方便,省力、安全; 4)夹紧装置的复杂程度与自动化程度应与 工件的生产批量和生产方式相适应。 3.夹紧力方向的确定原则 1)夹紧力作用方向应有利于工件的准确定 位,而不能破坏定位。为此一般要求夹紧力方 向朝向定位元件,且应垂直于主要定位基准。 2)夹紧力作用方向应使工件夹紧变形小。 为此一般要求夹紧力作用方向最好指向工件刚 讲授法; 讨论法; 多媒体; 1、教师 讲解; 2、学生 听课 10 分 钟
多工位自动夹紧装置的设 计 Prepared on 24 November 2020
无锡太湖学院 毕业设计(论文)题目:多工位自动夹紧装置的设计工学院机械工程及自动化专业 学号: 1223120 学生姓名:费佳伟 指导教师: XXX (职称:XXX) 2016年5月25日
摘要 在对多工位自动夹紧装置系统结构的设计工作,可以分为计划方案的定制、传动设备、夹紧构造的设计包括基本部件的设计,最后针对部分设计的效果进行检验。在对多功能自动夹紧装置的设计中设有两个夹具杆,节省了零件下料到夹紧以及放松的时间,减轻人工的负担,更加智能化、人性化,机体结构简单,可适应加工零件的不同厚度。拆卸和装配简单,节省资源。整体机构采用立式布置,结构紧凑,并使用电机作为动力来源,省时省力。在对能源设计方面,重新选择动力来源,改进切削方法,不仅增强了家用切片切丝机的加工能力,还提高了使用的安全性。 关键词:多工位;自动;PLC
ABSTRACT In the overall structure of the multi station automatic clamping device design process, including the principle of design, transmission mechanism, a clamping mechanism design of the main components and the structure design and on the part of the design results are checked. In the design of multi function automatic clamping device is provided with two jig rod, saving parts under the expected clamping and relax time, lighten the burden of artificial, more intelligent, humane and body structure simple, adapt to the different thickness of the parts processing. Disassembly and assembly is simple, save resources. The overall mechanism adopts the vertical layout, compact structure, and use the motor as a power source, saving time and effort. In design of energy, re select the source of power, to improve the cutting method, not only to enhance the household slicing and shredding machine processing capacity, but also improve the safety of use. Keywords: automatic cutting machine; PLC;
3.7化油器壳体定位及夹紧 3.7.1化油器壳体的定位 为方便加工时的定位,化油器壳体会压铸出两个工艺孔。利用这两个定位孔和化油器与浮子室之间结合面,形成两孔一面的定位方式。 其中一个定位面限制了化油器绕x轴和y轴的旋转和沿z轴移动的三个自由度。而化油器的定位面往往平面度不算太高,通常为0.1/l00×l00,如果用全平面来定位则会引起每个工件的不一致性。这是因为我们知道,对于不平面与平面的相互接触,一般只有三点能接触到,有时即使有多于三点的接触点,除了其中三点之外,也只能是虚约束点。对于不同的工件而言,定位基准面与工件接触的三点是随机的,而且随不同工件的不同而不同,因此每个工件的定位平面也不一样,这事必影响加工精度。对这点的改进方法是采用面积较小的三个圆柱面来代替全平面来作工件的定位基准面。从几何上来说三点已经可以确定一个基准平面了。由于基准面与工件结合面的接触面积减小,这样一来由工件平面度误差而引起的定位误差就有效地减小了。 再在其中的一个定位基准孔采用带弹簧的圆锥销定位。这里采用圆锥销而不采用圆柱销是因为圆锥销有更好的导向性能,而且圆锥销与工件上的定位孔相接触点为一圆,它可以有效地限制工件在z平面内沿x轴和沿y轴的平行移动。另一方面,由于工件夹紧时圆锥销会随弹簧产生一些退让,可以让工件平面与基准面进行有效地贴合。 由于基准面和主基准孔的定位已经约束工件六个自由度中的五个自由度。所以副基准孔所能约束的自由度只剩下绕z轴的旋转自由度了。因此在这里采用带弹簧的圆锥菱形销了当然也可能采用扁形销,只是前者具有更好的美观的外观和较好的强度结构。由于菱形销的长边垂直于两基准孔之间的连线,所以有效地约束了平面内的旋转自由度。 对于一般的孔系加工,利用两孔一面的定位方式就已足够,有时基于保证特殊的工艺要求或装夹与定位的方便,也可以采用其他的定位方式。如利用加工好的柱塞孔定位:柱塞孔与中子的配合面可以约束沿x轴和y轴平移等两个自由度,喉管孔下侧孔与中子顶弧面的接触可以约束沿z轴平移和沿x轴和沿y轴旋转等三个自由度,剩下的一个沿z轴旋转的自由度由附加的限位螺钉调定。 3.7.2化油器壳体的夹紧 在工件完成定位后,一般还要进行夹紧后才能进行加工切削。对于半自动加工机床,常常采用手动夹紧来简化机床结构。而对于组合式全自动加工机床,通常采用的是自动夹紧。夹紧时依驱动方式分可以是气动夹紧或液压夹紧。由于气动夹紧力一般都不大,所以还必须通过凸轮、杠杆、楔形等机构来进行力的放大或实现自锁。而液压夹紧力一般都比较大,所以通常在液压的夹紧回路装置有减压阀来防止在过大的系统压力下夹紧时夹坏工件。 如图3—5所示,凸轮极坐标曲线可分为快速上升段、自锁段和过渡段。快速上升段是使夹爪快速接近工件,而自锁段可以使夹爪获得较大的力大放大系数,并由于其斜度小于自锁角,而实现自锁功能,防止在加工过程中因为意外情况,如压缩空气气源失压时工件可能松动,从而引起未可预知的严重后果。
课题项目:工件的夹紧和夹紧装置 教学目标知识目标 1、掌握基本夹紧机构夹紧力的计算方法; 2、掌握基本夹紧机构自锁条件的确定方法;能力目标 1、掌握斜楔夹紧机构的原理及组成; 2、掌握螺旋夹紧机构的结构及原理; 3、掌握圆偏心夹紧机构的原理。 素质目标 1、培养学生语言表达能力; 2、培养学生自主学习的能力; 3、培养学生团队协作的能力; 4、增强学生的安全意识。 教学重点基本夹紧机构自锁条件的确定方法 教学难点螺旋夹紧机构的结构及原理 课型多媒体授课授课课时2课时 教学过程教学内容教学方 法、手段 师生 活动 时间 分配 导入 根据下图中斜楔夹紧机构的受力分析,来 确定基本夹紧机构夹紧力的计算、自锁条件及 几何特点,是我们本项目所要解决的问题。 情境教 学法 多媒体 1、教师 讲解; 2、学生 听课 5 分 钟 教 学实施告知 1.夹紧装置的组成 1)力源装置力源装置是产生夹紧原始作 用力的动力装置。通常使用的动力装置有气压 装置、液压装置、电动装置、磁力装置等; 2)夹紧机构夹紧机构一般由中间递力机 构和夹紧元件组成。它的作用是传递原始作用 力,改变其大小、方向,使之变为夹紧力,并 执行夹紧工件的任务。 2.夹紧装置的基本要求 1)在夹紧过程中应能保持工件定位时所获 得的正确位置; 2)夹紧应可靠和适当; 3)夹紧装置应操作方便,省力、安全; 4)夹紧装置的复杂程度与自动化程度应与 工件的生产批量和生产方式相适应。 3.夹紧力方向的确定原则 1)夹紧力作用方向应有利于工件的准确定 位,而不能破坏定位。为此一般要求夹紧力方 向朝向定位元件,且应垂直于主要定位基准。 2)夹紧力作用方向应使工件夹紧变形小。 为此一般要求夹紧力作用方向最好指向工件刚 度最大的方向。 讲授法; 讨论法; 多媒体; 1、教师 讲解; 2、学生 听课 10 分 钟
两种定位夹紧机构工作原理分析 摘要:在生产中,我们时常会遇到需要夹紧工件的情况,对于不同形状的工件,我们需要不同类型的夹紧机构。本文主要介绍两类比较常用的快速夹紧机构,即斜楔式夹紧机构和偏心轮式夹紧机构的受力分析和自锁条件 关键词:夹紧力、自锁、升角、偏心轮 快速夹紧机构是指以快速简便的动作就能实现对物体施加某种形式的作用力,使之夹紧 固定、夹持移位或夹紧制动的机构。①根据其作用,分为定位夹紧机构、夹持位移机构和制 动夹紧机构。其中,定位夹紧机构是将工件定位夹紧后,能承受一定的外力作用而不松动的机构。如机床加工夹具和各种测试夹具等。本文介绍的两种快速夹紧机构即为定位夹紧机构。 一.斜块式斜楔夹紧机构(斜楔机构) 1.受力分析 斜楔夹紧机构的受力图如图1所示,作用力Q 推动楔块,顶块沿斜面向上的夹紧力为P ,法向力N 与沿接触面的摩擦力f 合成一个反力R 。顶块在Q 、P 和R 的作用下处于平衡状态,由里的封闭三角形可知,顶块的夹紧力为 tan() Q P =α+? 式中α———楔块斜面升角 φ———反力R 作用线与法向反力N 作用线之间的夹角,成为摩擦角。 α Q R N f P αφQ R P αφ 图1
αR f P α φ N Q P Q R φαγ L e h P O 1 O 2工件 A F α 图2 图3 2.自锁条件 夹紧后。顶块保持在夹紧状态,楔块不会自动松脱的现象,成为自锁。② 如图2所示,若顶块沿斜面向下相对滑动时,楔块将被推出。这时,P 为主动力,Q 为支持力,摩擦力f 向上。F 和法向力N 合成反力R 。可得 tan()Q P =?-α 由上式可知,若α>?,则Q<0,即力Q 的方向与图中所示相反。这时,只要存在力Q 就能使楔块松脱。若α
洛阳理工学院 课程设计说明书 设计课题液压与机械组合夹紧装置设计 专业机械设计制造及其自动化 班级 姓名 学号 2014年 02月 25日
摘要 提出了以可装配式内置齿条活塞杆与曲柄连杆机构组合得到液压一机械复合夹紧装置的创新设计理念。内置齿条活塞杆与曲柄连杆机构组合构成的液压一机械复合夹紧装置,具有高性能、高灵活性、短开发周期、低生产成本的特点。 关键词:复合夹紧装置内置活塞杆液压缸曲柄连杆机构 引言 随着各种设备对液压执行元件产品多样性、个性化要求的增高,需要根据不同用途、条件和性能对产品进行设计制造。液压一机械复合夹紧装置可以适应各种不同机械设备的需求,以较小技术复杂性实现较大的复合夹紧装置功能多样化。本文提出的基于内置齿条活塞杆式液压缸与曲柄连杆机构的复合夹紧装置,具有实现高质量、大规模、快速、经济地响应市场的需求。 1、设计背景 常见的内置齿条式活塞杆液压缸, 其优点是刚性好、结构紧凑,但需通过串动。以前的设计将齿条与活塞设计成整体式,使得这种结构液压缸,只能适用于单一用途,而不能适应不同用途、
不同使用条件、不同性能的需求。 图1传统的内置齿条齿轮活塞杆液压缸 内置活塞杆式液压缸也称无杆式液压缸,具有刚性好、结构紧凑的优点。常用的的内置齿条式活塞杆液压缸如图1,齿轮齿条加工复杂,且该结构液压缸仅用于单一用途,不能适应不同使用条件和性能的需求。 经过多次实验,创新设计了内置中孔活塞杆式液压缸与杠杆结构的液压-机械复合夹紧装置,结构简单,加工工艺好,可满足自动化设备模块化、可重用性、兼容性和多种需求的特点,可以较小技术复杂性实现较大的复合传动装置功能多样化。 在图1结构基础上,保留活塞和缸体机构,将齿条活塞杆改变矩形杆,在矩形杆上加上一个径向矩形孔,一只滚轮以适当的间隙配合置于径向孔中,以该内置中孔活塞杆组成的液压缸为基本结构与杠杆结构配合便可构成图2的基于内置中孔活塞杆式液压缸与杠杠机构的夹紧装置。 基于内置中孔活塞杆式液压缸与杠杆机构的夹紧装置
机械加工中工件的一般定位方法及定位 元件 收藏此信息打印该信息添加:佚名来源:未知 工件上的定位基准面与相应的定位元件合称为定位副。定位副的选择及其制造精度直接影响工件的定位精度和夹具的工作效率以及制造使用性能等。下面按不同的定位基准面分别介绍其所用定位元件的结构形式。 1.工件以平面定位 (1) 支承钉 如图3-12所示。当工件以粗糙不平的毛坯面定位时,采用球头支承钉(B型),使其与毛坯良好接触。齿纹头支承钉(C型)用在工件的侧面,能增大摩擦系数,防止工件滑动。当工件以加工过的平面定位时,可采用平头支承钉(A型)。 在支承钉的高度需要调整时,应采用可调支承。可调支承主要用于工件以粗基准面定位,或定位基面的形状复杂,以及各批毛坯的尺寸、形状变化较大时。如图3-13是在规格化的销轴端部铣槽,用可调支承3轴向定位,达到了使用同一夹具加工不同尺寸的相似件的目的。 可调支承在一批工件加工前调整一次,调整后需要锁紧,其作用与固定支承相同。
在工件定位过程中能自动调整位置的支承称为自位支承。其作用相当于1个固定支承,只限制1个自由度。由于增加了接触点数,可提高工件的装夹刚度和稳定性,但夹具结构稍复杂,自位支承一般适用于毛面定位或刚性不足的场合。如图3-10(a)中的球面支承。 工件因尺寸形状或局部刚度较差,使其定位不稳或受力变形等原因,需增设辅助支承,用以承受工件重力、夹紧力或切削力。辅助支承的工作特点是:待工件定位夹紧后,再调整辅助支承,使其与工件的有关表面接触并锁紧。而且辅助支承是每安装一个工件就调整一次。但此支承不限制工件的自由度,也不允许破坏原有定位。 (2) 支承板 工件以精基准面定位时,除采用上述平头支承钉外,还常用图3-14所示的支承板作定位元件。A型支承板结构简单,便于制造,但不利于清除切屑,故适用于顶面和侧面定位;B型支承板则易保证工作表面清洁,故适用于底面定位。 夹具装配时,为使几个支承钉或支承板严格共面,装配后,需将其工作表面一次磨平,从而保证各定位表面的等高性。 2.工件以圆柱孔定位 各类套筒、盘类、杠杆、拨叉等零件, 常以圆柱孔定位。所采用的定位元件有圆柱销和各种心轴。这种定位方式的基本特点是:定位孔与定位元件之间处于配合状态,并要求确保孔中心线与夹具规定的轴线相重合。孔定位还经常与平面定位联合使用。 (1) 圆柱销
模块3夹紧装置设计 【知识目标】 机床夹具夹紧装置的组成和基本要求; 夹紧装置中夹紧力大小、方向及作用点的基本确定方法; 基本夹紧机构(斜楔夹紧机构、螺旋夹紧机构、偏心夹紧机构、铰链夹紧机构)等工作特性。 【技能目标】 掌握联动夹紧机构、定心夹紧机构以及夹紧动力装置的应用; 掌握专用夹具夹紧装置设计的基本方法及应用; 培养学生查阅“设计手册”和资料的能力,逐步提高学生处理实际工程技术问题的能力。 【任务描述】 机械加工过程中,被加工的工件常会受到切削力、离心力、重力、惯性力等的作用,在这些外力作用下,要使工件仍能在夹具中保持已由定位元件所确定的加工位置,而不致发生振动或偏移,保证加工质量和生产安全,夹紧装置的设计尤为重要,一般夹具结构中都必须设计夹紧装置将工件可靠夹牢。同时夹紧装置的结构合理性、装卸快捷性及使用的安全性等因素对于工件的加工的质量有重要的影响。 如图3-1所示,需要加工摇臂零件φ18H7孔,本任务就是根据加工要求设计一套专用夹具的夹紧机构来满足孔φ18H7的加工要求。 图3-1加工摇臂零件φ18H7孔 【任务分析】 图3-1为加工摇臂零件φ18H7孔的工序图,要求根据加工工艺要求设计该零件的夹紧装置。首先要分析在加工φ18H7孔时,需要限制该零件哪几个自由度,既确定工件的定位基准;其次要根据夹紧装置的基本要求,来确定夹紧的三要素(大小、方向、作用点),并且根据常见夹紧装置的结构及生产现场的情况初步确定夹紧装置的结构特点。最后要对夹紧装置进行误差分析和相关特性分析。 【任务引导】 (1)工件定位与夹紧概念是什么?工件夹紧是由什么装置实现的? (2)机床夹具夹紧装置的组成和基本要求是什么? (3)夹紧力确定的基本原则是什么? (4)基本夹紧机构有哪些?主要结构特点是什么? (5)联动夹紧机构的种类有哪些?主要结构特点是什么? (6)定心夹紧机构的种类有哪些?主要结构特点是什么? (7)夹紧动力装置有哪些?主要结构特点是什么? (8)生产现场机床夹具动力装置有哪些? (9)生产现场专用机床夹具气动和液压动力装置组成有哪些?
压力机与垫板间夹紧装置的设计说明书 1引言 传统的压力机与垫板间的夹紧机构采用手动操作,这在现代化生产实际中,已远远不能满足自动化生产的需要。 现代化的机械设备的控制技术手段是多种多样的,电器方法、机械方法、液压方法、电气液压方法以及气动方法等等,均可以用来实现自动控制。其中,机-电-液一体化设计已成为当代机械工业技术和产品发展的主要趋向,沿用已久的分工脱节,各管一段的设计方法,不仅耗时,而且难以获得一体化系统的最佳设计结果。 本设计引入了机、电、液一体化系统的设计理念,寻求有效的设计理论和方法来实现压力垫板夹紧的自动控制。 机械装置设计的重点是利用螺旋传动实现螺杆的上升、下降。因此,螺杆设计是本设计机械部分的核心。要求齿轮啮合传动安全、可靠、效率高,螺杆与螺母的传动能够自锁,有安全保障。 螺杆由45号钢调质处理,再对其进行淬火处理,使螺杆的强度与硬度提高。由于螺杆在本设计中的重要作用,决定了螺杆的寿命是本设计成败的重要标志。设计时,充分考虑了螺杆的强度和机械自锁,必须保证螺杆在任意位置能够自锁,才能使整个夹紧装置安全、可靠。尤其在螺杆及整个夹紧装置摆出一定角度,以使工人取出垫板时,不但要保证液压系统能够自锁,而且要求螺杆也要自锁。否则,夹紧装置失效,将造成极坏的后果。在设计的过程中,还考虑了许多的实际问题,如为给压力继电器提供有效的压力发讯信号,在螺杆的特定位置增加了圆环-半圆环结构,由螺栓联结,在螺杆轴向下降、放松垫板时,放松到位后,圆环-半圆环结构与螺母接触,压力继电器得到发讯信号作用,螺杆停止下降,放松到位。 圆环-半圆环结构在本设计中还有其他应用,除与螺母接触使压力继电器发讯之外,还被加在螺母上,作用相当于一个挡圈,防止齿轮由于重力而脱离螺母。 液压缸与液压马达的驱动控制由液压系统控制,在液压系统中应用了电磁换向阀与压力继电器。电磁换向阀与压力继电器和电动机的控制均由电气控制系统实现。 整个装置组成简单,结构精巧,控制方便,性能可靠,有很好的应用前景。
介绍一种快速夹紧机构 崔丽娟 (燕山大学继续教育学院,河北 秦皇岛 066004) 众所周知, 螺旋夹紧机构是应用最广的一种夹紧机构,它主要是利用螺纹直接夹紧工件,或者是与其他元 件或机构组成复合夹紧机构来夹紧工件。螺旋夹紧机构具有结构简单、制造容易、夹紧可靠、增力比大、行程不受限制等优点。但同时也具有夹紧动作慢、辅助时间长、效率低等缺点,尤其是当用同一夹具频繁交替夹紧大小不同的工件时,更要不停的转动螺杆以改变行程(如型材切割机)。为了使螺旋夹紧机构更好的发挥作用,扬长避短。人们设计了各种各样的能快速夹紧的螺 旋夹紧机构,本文就是笔者设计的快速夹紧机构。整个夹紧机构结构如图1所示:夹紧螺杆与夹具体为螺纹联结。为便于旋转,夹紧螺杆右端安装手轮(或手柄);顶杆与夹紧螺杆间为较大的间隙配合,以使螺杆能滑动自如;防转销是可以防止螺杆转动的,在夹紧螺杆上防转螺钉的另一侧装有防止顶杆后退的定位销;为了改善夹紧效果,避免因顶杆转动带动工件偏转而破坏定位、破坏工件表面,还可在顶杆头部装上可摆动的光面压块或槽面压块。 图1 夹紧机构结构示意图 整个操作过程极其简单,放置好工件后,根据工件 大小直接将顶杆向左推抵工件或接近工件,此时定位销自动卡住顶杆,使之不能右移;此时转动夹紧螺杆,即可完成工件夹紧工作。 本机构具有以下特点:a.机构结构简单,尺寸、精度要求低 ,便于加工制造。即使利用现有夹具改造也不复杂,只要把现有夹具螺杆稍做加工,再加工一顶杆即可。 b.夹紧迅速、快捷。一般夹紧时转动螺杆不超过一圈。例:夹紧螺杆螺纹为M48×5,顶杆上齿条间距为5,则 无论工件大小如何,推动顶杆时顶杆到工件的最小距离L <5,此时,夹紧螺杆最多再转动一周,便可将工件夹紧。 c.夹紧螺杆、顶杆和定位销为主要受力元件,在设计时要进行强度校核。一般夹紧螺杆为铸钢或铸铁材料,顶杆、定位销采用45#钢,顶杆和定位销的齿牙部位要求进行适当热处理,以提高耐磨性和机械强度。 d.本机构行程调节快速方便,彻底避免了传统夹具频繁转动夹紧螺杆的繁琐工作,尤其适用于小修理厂或加工厂频繁更换工件的场合。 收稿日期:2003-3-20 技术经验 2003年第10期 砖瓦 2003Brick&Tile www. brick -tile .com 23
1引言 传统的压力机与垫板间的夹紧机构采用手动操作,这在现代化生产实际中,已远远不能满足自动化生产的需要。 现代化的机械设备的控制技术手段是多种多样的,电器方法、机械方法、液压方法、电气液压方法以及气动方法等等,均可以用来实现自动控制。其中,机-电-液一体化设计已成为当代机械工业技术和产品发展的主要趋向,沿用已久的分工脱节,各管一段的设计方法,不仅耗时,而且难以获得一体化系统的最佳设计结果。 本设计引入了机、电、液一体化系统的设计理念,寻求有效的设计理论和方法来实现压力垫板夹紧的自动控制。 机械装置设计的重点是利用螺旋传动实现螺杆的上升、下降。因此,螺杆设计是本设计机械部分的核心。要求齿轮啮合传动安全、可靠、效率高,螺杆与螺母的传动能够自锁,有安全保障。 螺杆由45号钢调质处理,再对其进行淬火处理,使螺杆的强度与硬度提高。由于螺杆在本设计中的重要作用,决定了螺杆的寿命是本设计成败的重要标志。设计时,充分考虑了螺杆的强度和机械自锁,必须保证螺杆在任意位置能够自锁,才能使整个夹紧装置安全、可靠。尤其在螺杆及整个夹紧装置摆出一定角度,以使工人取出垫板时,不但要保证液压系统能够自锁,而且要求螺杆也要自锁。否则,夹紧装置失效,将造成极坏的后果。在设计的过程中,还考虑了许多的实际问题,如为给压力继电器提供有效的压力发讯信号,在螺杆的特定位置增加了圆环-半圆环结构,由螺栓联结,在螺杆轴向下降、放松垫板时,放松到位后,圆环-半圆环结构与螺母接触,压力继电器得到发讯信号作用,螺杆停止下降,放松到位。 圆环-半圆环结构在本设计中还有其他应用,除与螺母接触使压力继电器发讯之外,还被加在螺母上,作用相当于一个挡圈,防止齿轮由于重力而脱离螺母。 液压缸与液压马达的驱动控制由液压系统控制,在液压系统中应用了电磁换向阀与压力继电器。电磁换向阀与压力继电器和电动机的控制均由电气控制系统实现。 整个装置组成简单,结构精巧,控制方便,性能可靠,有很好的应用前景。... . .
摘要 螺旋夹紧器是利用人力作用使螺杆上下做直线运动为原理的简单机械机构,使用起来比较方便,可用于科研、化工、工业等场所。本设计是用于较小工件、零件等机加工时常用的螺旋夹紧器装置,它可以将螺旋运动转换为直线运动,实现使用较小的人力去固定和夹紧物体,从而达到减轻人类劳动、提高劳动生产效率。其工作原理是通过人力作用,将动力传导到螺旋副,使螺杆上下作直线运动达到固定和夹紧作用。所设计的螺旋夹紧器是以零件的设计计算与校核为主要内容的设计,包括螺旋副、螺杆和螺母的设计计算与校核及其它零部件的选择确定,最后运用AutoCAD软件分别画出所设计的螺旋夹紧器的各个零部件及装配图。 关键词:螺旋,夹紧器,设计
ABSTRACT Screw Clamp is the use of human role to screw up and down to do a simple linear motion machinery for the principle of agency, so that it is more convenient to operate, can be used for research, chemicals, industry and other places. This design is used for spiral clamping device where small parts and machine parts are processed, which can convert the spiral movement to linear motion. It can make an achievement of using smaller manpower to fix and clamp objects. Therefore, human labor is relieved and working productivity is improved. Its principle is that through the manpower, the power is transmitted to the screw to make it up and down in a straight line to reach the effect of fixing and clamping. The main content of the design of the spiral clamp is calculation and checking of machine parts, which include screw pair, screw and nut and other parts’ selection. Finally using AutoCAD software respectively work out all the parts and assembly drawing of the Screw Clamp design. KEYWORDS: screw, clamp, design
夹具设计师手册丨十三种夹紧装置图例 本周为大家带来的是十四种夹紧装置图例 1.消除齿侧间隙 图1 注意左上图所示的齿抢C和齿轮E用键连接。具有弹簧加载的齿轮D在C和E之间的空间转动,如A-A剖面图所示。弹簧使齿轮C和E在一个方向转动,而使齿轮D在相反方向转动,这样便消除了C和E与工件相配轮齿之间的任何间隙。 C上的固定螺钉限制D的转动(见B-B剖面图)。压板上的两个指孔F使拆卸压板方便。 2.中心架 图2 当手柄摆到左边并离开F后,将爪A抬起。当H调整垂直位置时,可调正偏心轴G使爪A 和B水平移动。可调止动螺钉E用以防止夹紧动作。中心架只使工件定位,而不夹紧工件。 3.拉刀夹头 图3
推下才使三个夹爪B退出,便可卸下拉刀。 4.扭矩手轮 图4 当手柄上的扭矩很大时,弹簧加i载的钢球就会退出,使手柄打滑。轴与A用键连接。而B 固定在手轮上。 5.可调高度夹紧柱 图5 手柄只转动若干分之一转,即可使可调螺母产生夹紧动作。采用也是可调正的长螺母和螺栓则适应于高度不同的各个工件。 6.扭矩保护装置
图6 当捏手上的扭矩很大时,弹簧将使A打滑,A是用键与轴相连接的。这样,就不会夹得过紧。顺时针转动捏手可夹紧工件。 7.钻套移动装置 图7 手柄B移动两个钻套进入或离开工作位置;具有弹簧加载的销C使钻套在工作位置定位。 8.微调装置 图8 差动螺距可以获致一个极小的调整量。
图9 在只允许一齿和一槽相配之下,槽数和齿数的任意组合可使锁紧位置数量极大。9.半转夹紧螺钉 图10 螺钉转动半转,就把压板拉下并夹紧工件。弹簧柱塞掣子使压板保持在退出位置。 10.起重钩 图11 装有多个起重钩的桥式吊车常用来搬运大型零件和夹具。 11.手动液压泵