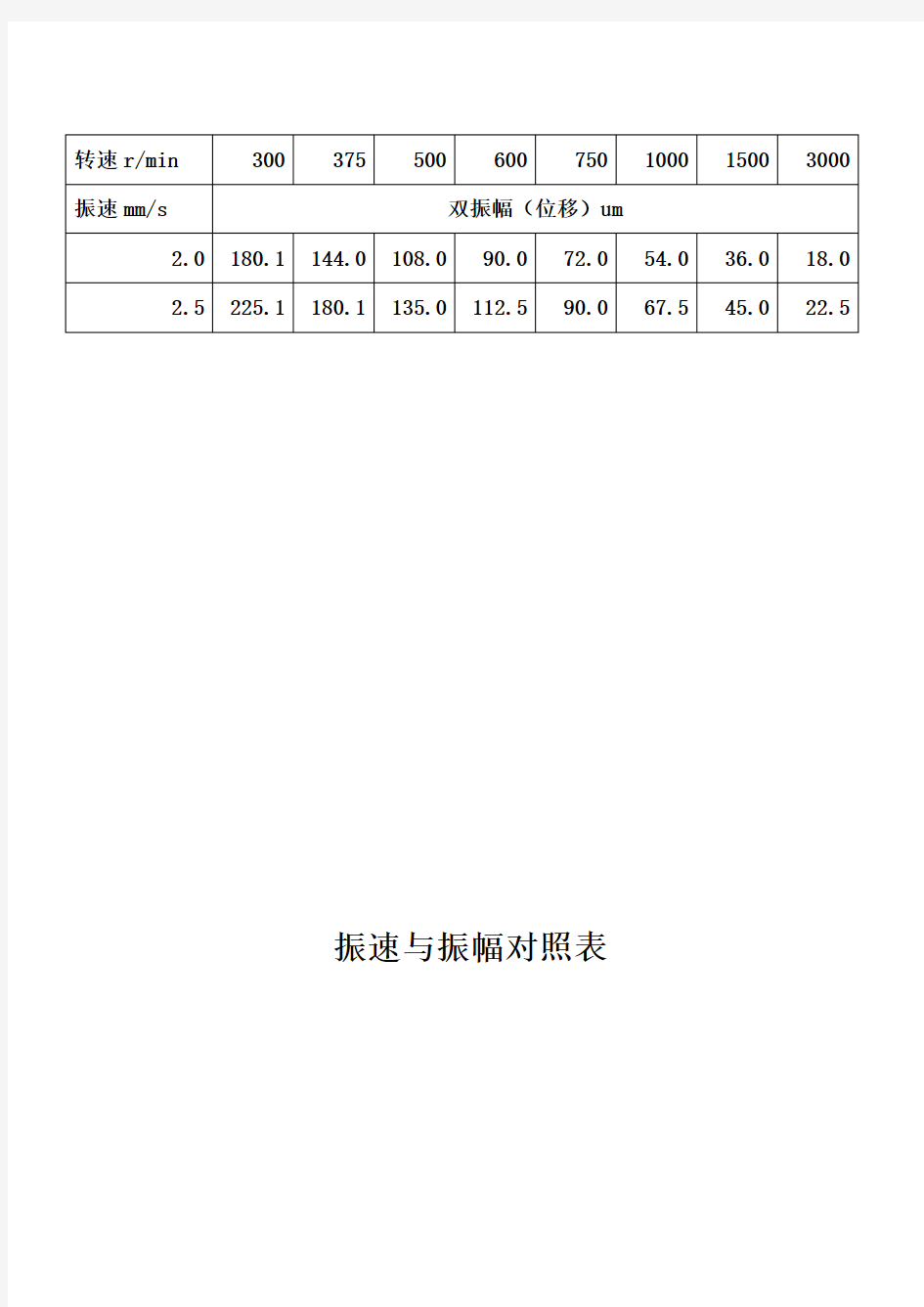

振速与振幅对照表
1、mm是振幅值,mm/s是振速,也叫振动烈度。不同的转机可能按照制造厂的出厂说明采取不同的单位来考核。换算公式可以用:A=V×1000×60×2^(0.5)/(pi×w)A是振动位移峰峰值,单位um。V是振动烈度,w是转速(r/min)。
2、风机运行工况一般通过测量其轴承温度和振动来判定。振动大小可通过测量振动位移、振动速度、振动加速度的方式来判定。太仓港环保发电有限公司送风机和一次风机测量的是振动速度(单位为mm/s),引风机测量的是振动位移(单位为um)。通常大家习惯于测量振动位移(即振幅),这就存在振动位移和振动速度二者相互换算,其换算公式为: Veff=7.4×10-5ns Veff---振动速度,单位为mm/s s------振动位移, 单位为um n------风机转速, 单位为r/min
3、mm/s指振速,mm指振幅,因为不能输入公式编辑器,简单地说二者换算关系为:Sf≈0.225vf/f,式中Sf 为振动的位移幅值,vf 为主频率为f 的振动速度的均方根值。一般f值均为10Hz,所以Sf≈0.0225vf 。举例说如果vf =1.00mm/s,那么换算成振幅则为Sf≈0.0225mm。
(注:文档可能无法思考全面,请浏览后下载,供参考。可复制、编制,期待你的好评与关注)
爆破振速监测 (1)监测目的 隧道施工对地面建筑的影响主要有两个方面:地表不均匀沉降和爆破振动,当这两者的作用超过建筑的承受能力,会造成楼房等地表建筑的开裂,后果非常严重。其中,爆破振动具有瞬时性,是居民对隧道施工最直接的感受,对居民的生活产生较大干扰同时也引发居民对建筑安全的担心和质疑。因此必须进行爆破振动监测,严格将爆破震动危害控制在允许的范围内,监测对象安全评价,为后续施工提供精确可靠的数据和指导后续施工爆破方案设计等是爆破振动监测的主要目的。 (2)工作内容 工作内容为对爆破影响范围内需保护的建(构)筑物进行实时振动监测,确保振速控制在规范规定和建、构筑物安全范围内,具体的工作内容有:现场熟悉、了解和掌握场址影响区范围内构筑物状况;配备先进监测设备、按有关规范对爆破影响区建(构)筑物进行爆破振动监测,对监测数据进行处理分析: A.对振动技术参数即频率、振幅、周期、振动时间、振动相位等的 监测。 B.对振动量即速度、加速度、位移等物理量的监测。 (3)爆破振动监测原理 爆破振动监测原理如流程图 由于炸药在岩石中的爆炸作用,使安装布置在监测质点上的传感器随质点振动而振动,使传感器内部的磁系统、空气隙、线圈之间作相对的运动,变成电动势信号,电动势信号通过导线输入可变增益放大器将信号放大,进入AD转换,再通过时钟、触发电路,同时也通过存储器信号保护,再通过CPU系统输入计算机,采用波形显示和数据处理软件进行波形分析和数据处理。
(4)监测方法 爆破振动监测是实时监测,所以在爆破前根据实地调查结果进行细致的准备工作,并严格按照工作流程进行工作。 为确保监测的准确可靠,首先对爆破点附近的监测对象进行详细准确的调查后,确定监测对象,然后在爆破前对监测系统进行检查、检测和标定,同时根据监测对象与爆破点相对位置关系,确定测点位置及布置方法,提前进入现场进行安置,根据爆破时间进行监测。 A 测点布置 根据设计要求,将爆破振动测点布置在所需监测的地表、建筑物结构支撑柱、隧道侧壁上。安装传感器时必须安装稳固,否则质点的速度监测数据将产生失真现象,一般采用石膏固定传感器效果较好。还应注意对传感器的保护,使其避免受到爆破碎石或其它物体的物理性损伤。另外必须注意传感器的方向性。 a、测点布置遵循的原则 最大振动断面发生的位置和方向监测; 爆破地震效应跟踪监测; 爆破地震波衰减规律监测。 b、测点的布置方法 按照上述原则和爆破地震的传播规律和以往的经验,隧道爆破振动监测点布置在隧道一侧底部,每次监测选择离爆破点最近的2个测点,每个测点布置垂直方向、水平方向和水平切向的传感器;地面建构筑物的测点布置在距爆破中心最近的建构筑物及其地表面,即靠近开挖隧道一侧(迎爆面)。 对于建构筑物测点选取基础上表面,若基础埋于土层下,则选择最近基础且坚实的散水作为测点。 B 监测 a、爆破振动速度监测系统 爆破振动速度测量系统一般由拾振器(或测振仪配合传感器)和记录器(包括计时器)两个部分组成。
何谓振幅振动速度振速振动加速度 振动一般可以用以下三个单位表示:mm、mm/s、mm/s2。 振幅、振动速度(振速)、振动加速度。 振幅是表象,速度和加速度是转子激振力的程度。 mm振动位移:一般用于低转速机械的振动评定; mm/s振动速度:一般用于中速转动机械的振动评定;mm/s2 振动加速度:一般用于高速转动机械的振动评定。 工程实用的振动速度是速度的有效值,表征的是振动的能量;加速度是用的峰值,表征振动中冲击力的大小。 振幅理解成路程,单位是mm;把振速理解成速度,单位是mm/s;振动加速度理解成运动加速度,单位mm/s2。速度描述的是运动快慢;振速就是振动快慢,一秒内能产生的振幅。振幅相同的设备,它的振动状态可能不同,所以引入了振速。 位移、速度、加速度都是振动测量的度量参数。就概念而言,位移的测量能够直接反映轴承固定螺栓和其它固定件上的应力状况。例如:通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种力的综合作用。表达上三者均为正弦曲线,分别有90度,180度的相位差。现场应用上,对于低速设备(转速小于1000RPM)来说,位移是最好的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。另外还需要了解传感器的工作原理及应用选择,提及一点,例如采用涡流传感器测量的位移和应用加速度传感器通过两次积分输出的位移所得到的东西是完全不一样的。涡流传感器测量轴承与轴杆之间的相对运动,加速度传感器测量轴承顶部的振动,然后转换成位移。如整个轴承振动的很厉害,轴与轴承的相对运动很小,涡流传感器就不能反应出这样的状态,而加速度传感器则可以。两种传感器测量两种不同的现象。理解了这些,你就能明白为什么许多有经验的工程师将涡流传感器和
振动测量与计算 1、常用的振动测量参数有振幅、振动速度(振速) 、振动加速度。对应单位表示为:mm 、mm/s 、mm/(s 2)。 振幅是表象,定义为在波动或振动中距离平衡位置或静止位置的最大 位移。振幅在数值上等于最大位移的大小。振幅是标量,单位用 米或厘米表示。它描述了物体振动幅度的大小和振动的强弱。系统振动中最大动态位移,称为振幅。 在下图中,位移y 表示波的振幅。 速度和加速度是转子激振力的程度。 2、三者的区别:位移、速度、加速度都是振动测量的度量参数。就
概念而言,位移的测量能够直接反映轴承/ 固定螺栓和其它固定件上的应力状况。例如:通过分析汽轮机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种力的综合作用。表达上三者均为正弦曲线,分别有90 度,180度的相位差。现场应用上,对于低速设备(转速小于1000rpm)来说,位移是最好的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。 3、现场一般选用原则如下: mm 振动位移:与频率f 无关,特别适合低频振动(<10Hz ))选用,一般用于低转速机械的振动评定 mm/s 振动速度:速度V=X ω,与频率f 成正比,通常推荐选用 一般用于中速转动机械(或中频振动(10~1000Hz ))的振动评定 mm/ (s2)振动加速度:A=V ω=Xω 2与频率f 2成正比,特别适合高频振 动选用;一般用于高速转动机械(或高频振动(>1000Hz ))的振动评定。其中:ω =2 πf 4、工程上对于大多数机器来说,最佳诊断参数是速度(速度的有效值),因为它是反映诊断强度的理想参数,表征的是振动的能量;所以国际上许多振动诊断标准都是采用速度有效值作为判别参数。振幅相同的设备,它的振动状态可能不同,所以引入了振速。加速度是用的峰值,表征振动中冲击力的大小。 5、振速与位移换算
田佳星海洋技术12020041049 今天我介绍一下声学中波动方程得建立。我们首先介绍一下声学得基本概念。 声波就是机械振动状态在介质中得传播。存在声波得空间称为声场。理论上描述声场需要引入一些物理量:声压、位移、振速、密度压缩量与相位等。通常采用上述各物理量得时空分布函数描述声场。下面对这些物理量作简要介绍。 1、基本概念 1) 声压(标量) 声波为压缩波。描述“压缩”过程得一个物理量就是压强。然而,声波就是声扰动(如振动源)引起介质中得压强发生变化得部分。因此,我们引入声压得概念: 声压为介质压强得变化量: (2-1) 其中,就是压强,就是介质中得静态压强。 声压就是描述波动得物理量。为使用方便,还由声压引入了瞬时声压、峰值声压与有效声压。 声场中某瞬时得声压称为瞬时声压。一定时间间隔内得最大瞬时声压称为峰值声压。瞬时声压在一定时间间隔内得均方根值称为有效声压,即 (2-2) 对简谐声波,、与相互之间得关系与电压可作相同类比,即 。 一般仪器仪表测得就是有效声压。 2) 位移与振速(矢量) 质点位移就是指介质质点离开其平衡位置得距离、质点振速就是介质质点瞬时振动得速度。两者均就是有大小与方向得量,即矢量,相互关系为 (2—3) 对简谐振动,位移与振速都满足如下关系: , (2—4a) , (2-4b) 其中,与分别为位移幅值与振速幅值。
需要注意得就是区分质点振速与声传播速度。声传播速度就是指振动状态在介质中传播得速度,而质点振速就是指在给定时间与给定空间位置得某一质点得振动速度。 3) 密度与压缩量 密度得变化也就是描述声波得一个物理量。这里引入压缩量得概念: (2-5) 其中,密度,为静态密度,为密度改变量。 压缩量s得含义为介质密度得相对变化量、 4) 相位 为描写简谐振动而引入得物理量。它描述质点简谐振动得状态。质点振动得一个周期对应着相位0—2π、相位与质点振动状态有一一对应得关系。 声波就是振动状态在介质中得传播,而相位描述得就是质点简谐振动得状态、由此可见相位在声场描述中得重要性。 以上物理量并不就是独立得,如根据位移由(2-3)式可以求出振速。实际应用时可根据需要选择使用哪些物理量来描述,如对简谐声波,只需要位移幅值与相位就可导出振速、加速度等基本物理量;更进一步,如果已知介质条件,只要知道位移幅值与相位得初值,就可计算声场得时空分布函数了。 2. 理想流体介质中得小振幅波 本节先建立描述声波得基本方程-波动方程,并讨论波动方程得线性特性;然后分别介绍波动方程在几种简单介质条件下得解-行波解、平面波解、球面波解与柱面波解,并对各种解中相关得物理量,如声场中得能量、介质特性阻抗与声阻抗率、相速度与群速度等概念,进行讨论,并重点分析在水声物理中应用较多得平面波在两种不同均匀介质界面上得反射与折射现象。 一、波动方程 2、1建立波动方程 为更清楚地了解声波得物理本质,我们先对介质条件与声波做出一定得限制,而得到形式简洁得波动方程,并通过它认识声波得物理本质。在后续得学习与研究过程中,将不断引入更为复杂得介质条件与放宽对声波得限制,再进行研究、这也就是物理中研究常用得方法之一。 假设条件: ?介质静止、均匀、连续得; ?介质就是理想流体介质,即忽略粘滞性与热传导; ?声波就是小振幅波。
mm/s 、mm/(s A 2) 。 振幅、振动速度(振速)、振动加速度。 振幅是表象,速度和加速度是转子激振力的程度。 mm 振动位移:一般用于低转速机械的振动评定; mm/s 振动速度:一 般用于中速转动机械的振动评定; mm/( s“2)振动加速度:一般用 于高速转动机械的振动评定。 工程实用的振动速度是速度的有效值, 表征的是振动的能量;加 速度是用的峰值,表征振动中冲击力的大小。 振幅理解成路程,单位是 mm 把振速理解成速度,单位是 mm/s 振动 加速度理解成运动加速度,单位mm/s2速度描述的是运动快慢; 振速就是振动快慢,一秒内能产生的振幅。振幅相同的设备,它的振 动状态可能不同,所以引入了振速。 位移、速度、加速度都是振动测量的度量参数。就概念而言 ,位 移的测量能够直接反映轴承 固定螺栓和其它固定件上的应力状况。 例如:通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的 位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。 而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种 力的综合作用。表达上三者均为正弦曲线,分别有90度,180度的相位 差。现场应用上,对于低速设备(转速小于1000RPM 来说,位移是最好 的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的 方法,即振动一般可以用以下三个单位表示: mm 、
采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。另外还需要了解传感器的工作原理及应用选择,提及一点, 例如采用涡流传感器测量的位移和应用加速度传感器通过两次积分输出的位移所得到的东西是完全不一样的。涡流传感器测量轴承与轴杆之间的相对运动,加速度传感器测量轴承顶部的振动,然后转换成位移。如整个轴承振动的很厉害,轴与轴承的相对运动很小,涡流传感器就不能反应出这样的状态,而加速度传感器则可以。两种传感器测量两种不同的现象。理解了这些,你就能明白为什么许多有经验的工程师将涡流传感器和加速度传感器组合应用以便既可观察轴承相对于地面的振动,又能监测到轴相对于轴承的振动了。通过这样的方式能得到更完整的机器状态对一个单一频率的振动,速度峰值是位移峰值的2nf倍,加速度峰值又是速度峰值的2nf倍。当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。假设一个振动的速度一定,是5mm/s大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。高频振动位移则极小,加速度很大。所以一般在低频区域都用位移,中频用速度,高频区域用加速度。但使用范围也有重叠。位移值体现的是设备在空间上的振动范围,因此取其峰峰值,电力行业一般以位移为评判标准。速度的有效值和振动的能量是 成比例的,其大小代表了振动能量的大小,现在出了电力行业基本上都是以速度有效值为标准的。加速度和力成正比,一般用其峰值,其大小
振动测量分析 三个单位:振幅mm、振动速度(振速)mm/s、振动加速度 mm/(s^2) 振幅是表象,速度和加速度是转子激振力的程度。 mm振动位移:一般用于低转速机械的振动评定; mm/s振动速度:一般用于中速转动机械的振动评定; mm/(s^2)振动加速度:一般用于高速转动机械的振动评定。 工程实用的振动速度是速度的有效值,表征的是振动的能量;加速度是用的峰值,表征振动中冲击力的大小。 振幅理解成路程,单位是mm;把振速理解成速度,单位是 mm/s;振动加速度理解成运动加速度,单位mm/s2。速度描述的是运动快慢;振速就是振动快慢,一秒内能产生的振幅。振幅相同的设备,它的振动状态可能不同,所以引入了振速。 位移、速度、加速度都是振动测量的度量参数。就概念而言,位移的测量能够直接反映轴承\固定螺栓和其它固定件上的应力状况。例如:通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种力的综合作用。表达上三者均为正弦曲线,分别有90度,180度的相位差。现场应用上,对于低速设备(转速小于1000RPM)来说,位移是最好的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。另外还需要了解传感器的工作原理及应用选择,提及一点,例如采用涡流传感器测量的位移和应用加速度传感器通过两次积分输出的位移所得到的东西是完全不一样的。涡流传感器测量轴承与轴杆之间的相对运动,加速度传感器测量轴承顶部的振动,然后转换成位移。如整个轴承振动的很厉害,轴与轴承的相对运动很小,涡流传感器就不能反应出这样的状态,而加速度传感器则可以。两种传感器测量两种不同的现象。理解了这些,你就能明白为什么许多有经验的工程师将涡流传感器和加速度传感器组合应用以便既可观察轴承相对于地面的振动,又能监测到轴相对于轴承的振动了。通过这样的方式能得到更完整的机器状态 对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。还要注意现场测量的位移是轴和轴瓦的相
声与振动基础 1.试述机械振动系统的机械Q值的物理意义。 2.何谓机械振动系统的固有频率?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其固有频率为何? 3.何谓机械振动系统的谐振频率?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其谐振频率为何? 4.何谓机械振动系统的共振频率?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其振速共振频率为何? 5.机械振动系统的谐振频率为200Hz,Q值为10,问:振速频响曲线的-3dB带宽为何? 6.何谓介质的特性阻抗?水和空气的特性阻抗大约为何? 7.何谓波阻抗?平面行波的波阻抗为何?均匀扩散球面波的波阻抗为何? 8.何谓辐射阻抗?如果辐射表面为S,振速均匀,并且在辐射表面附近声场近似为平面波;辐射器的辐射阻抗为何? 9.何谓辐射器的指向性函数?均匀脉动球的指向性函数为何?偶极子辐射器的指向性函数为何?10.辐射器辐射声场的近场区与远场区比较声场有何差别?定性解释这种差别产生的原因。如何确定近场区的距离? 11.理想流体中压强、质点振速和密度之间的变化遵循哪三个基本方程?这三个方程反映的基本物理定律是什么? 12.试写出:小振幅条件下,声压与振速的关系式。 13.试写出:小振幅条件下,声压与速度势的关系式。 14.何谓声场的声能流密度?试给出声能流与声压和振速的关系式。 15.何谓机械振动系统的机械阻抗?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其机械阻抗为何? 16.何谓‘拍频’振动?如何能形成‘拍频’振动? 17.何谓阻抗型类比?在阻抗型类比中,质量块对应哪种电路元件? 18.何谓导纳型类比?在导纳型类比中,质量块对应哪种电路元件? 19.一般机械阻抗为复数,请问:其幅值和相角的物理意义为何? 20.平面波斜入射到两种流体介质分界面时,何谓‘全透射现象’,其发生的条件如何? 21.平面波斜入射到两种流体介质分界面时,何谓‘全内反射现象’,其发生的条件如何? 23.随传播距离的增加,平面行波、均匀柱面扩散波和均匀球面扩散波的声强变化规律有何不同?为什么? 24.平面波斜入射到两种流体介质分界面时,如果发生了‘全内反射现象’,请问:下层介质中的声场有何特点? 25.声波在波导中传播,何谓‘简正波’?何谓‘简正波的截止频率’? 26.何谓波传播的‘相速度’?‘群速度’? 27.何谓‘频散介质’?声信号在频散介质中传播是否会发生信号畸变?为什么? 28.平面波由流体介质斜入射到流体/固体介质分界面时,固体中的折射波有横波和纵波,请问:横波折射角和纵波折射角哪个大?为什么? 29.平面波由流体介质斜入射到流体/固体介质分界面时,通常,固体中的折射波有横波和纵波;请问:如何能使固体中只有纵波?或只有横波? 30.研究细棒纵振动时,固定边界条件的物理意义为何?其数学表达式为何?自由边界条件的物理意义为何?其数学表达式为何? 22.研究细棒横振动时,嵌定边界条件的物理意义为何?其数学表达式为何?自由边界条件的物理意义为何?其数学表达式为何?简支边界条件的物理意义为何?其数学表达式为何? 十、声与振动基础答题要点: 1.至少说出机械Q值的一种物理意义。从系统能耗、系统带宽、过渡时间……等方面回答。
振动一般可以用以下三个单位表示:mm、mm/s、mm/(s^2)。 振幅、振动速度(振速)、振动加速度。 振幅是表象,速度和加速度是转子激振力的程度。 mm振动位移:一般用于低转速机械的振动评定; mm/s振动速度:一般用于中速转动机械的振动评定; mm/(s^2)振动加速度:一般用于高速转动机械的振动评定。 工程实用的振动速度是速度的有效值,表征的是振动的能量;加速度是用的峰值,表征振动中冲击力的大小。 振幅理解成路程,单位是mm;把振速理解成速度,单位是mm/s;振动加速度理解成运动加速度,单位mm/s2。速度描述的是运动快慢;振速就是振动快慢,一秒内能产生的振幅。振幅相同的设备,它的振动状态可能不同,所以引入了振速。 位移、速度、加速度都是振动测量的度量参数。就概念而言,位移的测量能够直接反映轴承\固定螺栓和其它固定件上的应力状况。例如:通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种力的综合作用。表达上三者均为正弦曲线,分别有90度,180度的相位差。现场应用上,对于低速设备(转速小于1000RPM)来说,位移是最好的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的
方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。另外还需要了解传感器的工作原理及应用选择,提及一点,例如采用涡流传感器测量的位移和应用加速度传感器通过两次积分输出的位移所得到的东西是完全不一样的。涡流传感器测量轴承与轴杆之间的相对运动,加速度传感器测量轴承顶部的振动,然后转换成位移。如整个轴承振动的很厉害,轴与轴承的相对运动很小,涡流传感器就不能反应出这样的状态,而加速度传感器则可以。两种传感器测量两种不同的现象。理解了这些,你就能明白为什么许多有经验的工程师将涡流传感器和加速度传感器组合应用以便既可观察轴承相对于地面的振动,又能监测到轴相对于轴承的振动了。通过这样的方式能得到更完整的机器状态 对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。高频振动位移则极小,加速度很大。所以一般在低频区域都用位移,中频用速度,高频区域用加速度。但使用范围也有重叠。位移值体现的是设备在空间上的振动范围,因此取其峰峰值,电力行业一般以位移为评判标准。速度的有效值和振动的能量是成比例的,其大小代表了振动能量的大小,现在出了电力行业基本上
振动声基础试题 1.试述机械振动系统的机械Q值的物理意义。 2.何谓机械振动系统的固有频率?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其固有频率为何? 3.何谓机械振动系统的谐振频率?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其谐振频率为何? 4.何谓机械振动系统的共振频率?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其振速共振频率为何? 5.机械振动系统的谐振频率为200Hz,Q值为10,问:振速频响曲线的-3dB带宽为何?6.何谓介质的特性阻抗?水和空气的特性阻抗大约为何? 7.何谓波阻抗?平面行波的波阻抗为何?均匀扩散球面波的波阻抗为何? 8.何谓辐射阻抗?如果辐射表面为S,振速均匀,并且在辐射表面附近声场近似为平面波; 辐射器的辐射阻抗为何? 9.何谓辐射器的指向性函数?均匀脉动球的指向性函数为何?偶极子辐射器的指向性函数为何? 10.辐射器辐射声场的近场区与远场区比较声场有何差别?定性解释这种差别产生的原因。 如何确定近场区的距离? 11.理想流体中压强、质点振速和密度之间的变化遵循哪三个基本方程?这三个方程反映的基本物理定律是什么? 12.试写出:小振幅条件下,声压与振速的关系式。 13.试写出:小振幅条件下,声压与速度势的关系式。 14.何谓声场的声能流密度?试给出声能流与声压和振速的关系式。 15.何谓机械振动系统的机械阻抗?由弹簧系数为D的弹簧,质量为M的质量块,阻尼系数为Rm的阻尼机械并联构成的单自由度振动系统,其机械阻抗为何? 16.何谓‘拍频’振动?如何能形成‘拍频’振动? 17.何谓阻抗型类比?在阻抗型类比中,质量块对应哪种电路元件? 18.何谓导纳型类比?在导纳型类比中,质量块对应哪种电路元件? 19.一般机械阻抗为复数,请问:其幅值和相角的物理意义为何? 20.平面波斜入射到两种流体介质分界面时,何谓‘全透射现象’,其发生的条件如何?21.平面波斜入射到两种流体介质分界面时,何谓‘全内反射现象’,其发生的条件如何?23.随传播距离的增加,平面行波、均匀柱面扩散波和均匀球面扩散波的声强变化规律有何不同?为什么? 24.平面波斜入射到两种流体介质分界面时,如果发生了‘全内反射现象’,请问:下层介质中的声场有何特点? 25.声波在波导中传播,何谓‘简正波’?何谓‘简正波的截止频率’? 26.何谓波传播的‘相速度’?‘群速度’? 27.何谓‘频散介质’?声信号在频散介质中传播是否会发生信号畸变?为什么? 28.平面波由流体介质斜入射到流体/固体介质分界面时,固体中的折射波有横波和纵波,请问:横波折射角和纵波折射角哪个大?为什么? 29.平面波由流体介质斜入射到流体/固体介质分界面时,通常,固体中的折射波有横波和纵波;请问:如何能使固体中只有纵波?或只有横波?
转子振动测量、计算基础及汽轮机组振动标准 1. 常用的振动测量参数 常用的振动测量参数有振幅、振动速度(振速)、振动加速度。对应单位表示为:mm、mm/s、mm/s2。 振幅是表象,定义为在波动或振动中距离平衡位置或静止位置的最大位移。振幅在数值上等于最大位移的大小。振幅是标量,单位用米或厘米表示。它描述了物体振动幅度的大小和振动的强弱。系统振动中最大动态位移,称为振幅。在下图中,位移y表示波的振幅。振动速度反映的是振动能量的大小,振动加速度则表征的是转子激振力的大小程度。 λ=wavelength,y=amplitude 2. 位移、速度、加速度三者的区别 位移、速度、加速度都是振动测量的度量参数。就概念而言,位移的测量能够直接反映轴承/固定螺栓和其它固定件上的应力状况。例如:通过分析汽
轮机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种力的综合作用。 表达上三者均为正弦曲线,分别有90度,180度的相位差。现场应用上,对于低速设备(转速小于1000rpm)来说,位移是最好的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。 3. 现场的一般选用原则 振动位移:与频率f无关,特别适合低频振动(<10Hz))选用,一般用于低转速机械的振动评定。 振动速度:速度V=Xω,与频率f成正比,通常推荐选用,一般用于中速转动机械(或中频振动(10~1000Hz))的振动评定。 振动加速度:A=Vω=Xω2,与频率f2成正比,特别适合高频振动选用,一般用于高速转动机械(或高频振动(>1000Hz))的振动评定。 其中:
测振仪三个参数 测振仪单位振动一般可以用以下三个单位表示:mm、mm/s、mm/(s^2)。 振幅、振动速度(振速)、振动加速度。 振幅是表象,速度和加速度是转子激振力的程度。 mm振动位移:一般用于低转速机械的振动评定;mm/s振动速度:一般用于中速转动机械的振动评定;mm/(s2)振动加速度:一般用于高速转动机械的振动评定。工程实用的振动速度是速度的有效值,表征的是振动的能量;加速度是用的峰值,表征振动中冲击力的大小。振幅理解成路程,单位是mm;把振速理解成速度,单位是mm/s;振动加速度理解成运动加速度,单位mm/s2。速度描述的是运动快慢;振速就是振动快慢,一秒内能产生的振幅。振幅相同的设备,它的振动状态可能不同,所以引入了振速。 位移、速度、加速度都是振动测量的度量参数。就概念而言,位移的测量能够直接反映轴承\固定螺栓和其它固定件上的应力状况。例如:通过分析透平机上滑动轴承的位移,可以知道其轴承内轴杆的位置和摩擦情况。速度反映轴承及其它相关结构所承受的疲劳应力。而这正是导致旋转设备故障的重要原因。加速度则反映设备内部各种力的综合作用。表达上三者均为正弦曲线,分别有90度,180度的相位差。现场应用上,对于低速设备(转速小于1000RPM)来说,位移是最好的测量方法。而那些加速度很小,其位移较大的设备,一般采用折衷的方法,即采用速度测量,对于高速度或高频设备,有时尽管位移很小,速度也适中,但其加速度却可能很高的设备采用加速度测量是非常重要的手段。另外还需要了解传感器的工作原理及应用选择,提及一点,例如采用涡流传感器测量的位移和应用加速度传感器通过两次积分输出的位移所得到的东西是完全不一样的。涡流传感器测量轴承与轴杆之间的相对运动,加速度传感器测量轴承顶部的振动,然后转换成位移。如整个轴承振动的很厉害,轴与轴承的相对运动很小,涡流传感器就不能反应出这样的状态,而加速度传感器则可以。两种传感器测量两种不同的现象。理解了这些,你就能明白为什么许多有经验的工程师将涡流传感器和加速度传感器组合应用以便既可观察轴承相对于地面的振动,又能监测到轴相对于轴承的振动了。通过这样的方式能得到更完整的机器状态。 对一个单一频率的振动,速度峰值是位移峰值的2πf倍,加速度峰值又是速度峰值的2πf倍。当然要注意位移一般用的峰峰值,速度用有效值,加速度用峰值。还要注意现场测量的位移是轴和轴瓦的相对振动,速度和加速度测的是轴瓦的绝对振动。假设一个振动的速度一定,是5mm/s,大家可以自己算下如果是低频振动,其位移会很大,但加速度很小。高频振动位移则极小,加速度很大。所以一般在低频区域都用位移,中频用速度,高频区域用加速度。但使用范围也有重叠。位移值体现的是设备在空间上的振动范围,因此取其峰峰值,速度的有效值和振动的能量是成比例的,其大小代表了振动能量的大小。加速度和力成正比,一般用其峰值,其大小表示了振动中最大的冲击力,冲击力大设备更容易疲劳损坏,现在没有加速度的标准。
声学中波动方程的建立 YKK standardization office【 YKK5AB- YKK08- YKK2C- YKK18】
田佳星 海洋技术 今天我介绍一下声学中波动方程的建立。我们首先介绍一下声学的基本概念。 声波是机械振动状态在介质中的传播。存在声波的空间称为声场。理论上描述声场需要引入一些物理量:声压、位移、振速、密度压缩量和相位等。通常采用上述各物理量的时空分布函数描述声场。下面对这些物理量作简要介绍。 1. 基本概念 1) 声压(标量) 声波为压缩波。描述“压缩”过程的一个物理量是压强。然而,声波是声扰动(如振动源)引起介质中的压强发生变化的部分。因此,我们引入声压的概念: 声压p 为介质压强的变化量: 0P P p -= (2-1) 其中,P 是压强,0P 是介质中的静态压强。 声压是描述波动的物理量。为使用方便,还由声压引入了瞬时声压p 、峰值声压0p 和有效声压e p 。 声场中某瞬时的声压称为瞬时声压。一定时间间隔内的最大瞬时声压称为峰值声压。瞬时声压在一定时间间隔内的均方根值称为有效声压,即 e p =对简谐声波,p 、0p 和e p 相互之间的关系和电压可作相同类比,即 0exp[]p p j t ω= 20p p e =。 一般仪器仪表测得是有效声压。 2) 位移和振速(矢量) 质点位移是指介质质点离开其平衡位置的距离。质点振速是介质质点瞬时振动的速度。两者均是有大小和方向的量,即矢量,相互关系为
u d dt ξ= (2-3) 对简谐振动,位移和振速都满足如下关系: 0exp[]j t ξξω=, (2-4a) 0exp[]u u j t ω=, (2-4b) 其中,0ξ和0u 分别为位移幅值和振速幅值。 需要注意的是区分质点振速和声传播速度。声传播速度是指振动状态在介质中传播的速度,而质点振速是指在给定时间和给定空间位置的某一质点的振动速度。 3) 密度和压缩量 密度的变化也是描述声波的一个物理量。这里引入压缩量的概念: ()0100ρρρρρ=-=s (2-5) 其中,ρ密度,0ρ为静态密度,01ρρρ-=为密度改变量。 压缩量s 的含义为介质密度的相对变化量。 4) 相位 为描写简谐振动而引入的物理量。它描述质点简谐振动的状态。质点振动的一个周期对应着相位0-2π。相位和质点振动状态有一一对应的关系。 声波是振动状态在介质中的传播,而相位描述的是质点简谐振动的状态。由此可见相位在声场描述中的重要性。 以上物理量并不是独立的,如根据位移由(2-3)式可以求出振速。实际应用时可根据需要选择使用哪些物理量来描述,如对简谐声波,只需要位移幅值和相位就可导出振速、加速度等基本物理量;更进一步,如果已知介质条件,只要知道位移幅值和相位的初值,就可计算声场的时空分布函数了。 2. 理想流体介质中的小振幅波 本节先建立描述声波的基本方程-波动方程,并讨论波动方程的线性特性;然后分别介绍波动方程在几种简单介质条件下的解-行波解、平面波解、球面波解和柱面波解,并对各种解中相关的物理量,如声场中的能量、介质特性阻抗和声阻抗率、相速度和群速度等概念,进行讨论,并重点分析在水声物理中应用较多的平面波在两种不同均匀介质界面上的反射和折射现象。 一、波动方程 建立波动方程
振幅的定义是: 物体离开平衡位置的最大位移,叫振动的振幅.它是表示振动的强弱的物理量. 振速: 是指波动中各质点都在平衡位置附近做周期性振动,是变加速运动。质点并没有沿波的传播方向随波迁移。 加速度的定义是速度的变化量和所用时间的比值叫做物体运动的加速度. 振动,指的是振幅,既振动的幅度,单位是mm, % x) I& @3 H4 a振速,是说振动的速度,单位是mm/s, 1、mm是振幅值,mm/s是振速,也叫振动烈度。不同的转机可能按照制造厂的出厂说明采取不同的单位来考核。换算公式可以用:A=V×1000×60×2^(0.5)/(pi×w)A是振动位移峰峰值,单位um。V是振动烈度,w是转速(r/min)。 2、风机运行工况一般通过测量其轴承温度和振动来判定。振动大小可通过测量振动位移、振动速度、振动加速度的方式来判定。太仓港环保发电有限公司送风机和一次风机测量的是振动速度(单位为mm/s),引风机测量的是振动位移(单位为um)。 通常大家习惯于测量振动位移(即振幅),这就存在振动位移和振动速度二者相互换算,其换算公式为: V eff=7.4×10-5ns V eff---振动速度,单位为mm/s s------振动位移, 单位为um n------风机转速, 单位为r/min 3、mm/s指振速,mm指振幅,因为不能输入公式编辑器,简单地说二者换算关系为:Sf≈0.225vf/f,式中Sf 为振动的位移幅值,vf 为主频率为f的振动速度的均方根值。一般f值均为10Hz,所以Sf≈0.0225vf 。举例说如果vf =1.00m m/s,那么换算成振幅则为Sf≈0.0225mm。