第11章轴对称问题的有限元分析
第1节基本知识
本节的有限元对象为轴对称问题,目的是学习将3D问题转化为2D问题分析的轴对称方法,涉及如何选取轴对称单元、建模规律、载荷的施加方法和后处理技术。
一、轴对称问题的定义
轴对称问题是指受力体的几何形状、约束状态,以及其它外在因素都对称于某一根轴(过该轴的任一平面都是对称面)。轴对称受力体的所有应力、应变和位移均对称于这根轴。
二、用ANSYS解决2D轴对称问题的规定
用ANSYS解决2D轴对称问题时,轴对称模型必须在总体坐标系XOY平面的第一象限中创建,并且Y轴为轴旋转的对称轴。
求解时,施加自由约束、压力载荷、温度载荷和Y方向的加速度可以像其它非轴对称模型一样进行施加,但集中载荷有特殊的含义,它表示的是力或力矩在360°范围内的合力,即输入的是整个圆周上的总的载荷大小。同理,在求解完毕后进行后处理时,轴对称模型输出的反作用力结果也是整个圆周上的合力输出,即力和力矩按总载荷大小输出。
在ANSYS中,X方向是径向,Z方向是环向,受力体承载后的环向位移为零,环向应力和应变不为零。
常用的2D轴对称单元类型和用途见表11-1。
在利用ANSYS进行有限元分析时,将这些单元定义为新的单元后,设置单元配置项KEYOPT(3)为Axisymmetric(Shell51和Shell61单元本身就是轴对称单元,不用设置该项),单元将被指定按轴对称模型进行计算。
后处理时,可观察径向和环向应力,它对应的是SX与SZ应力分量,并且在直角坐标系下观察即可。
可以通过轴对称扩展设置将截面结果扩展成任意扇型区域大小的模型,以便更加真实地
观察总体模型的各项结果。
第2节2D轴对称问题有限元分析实例
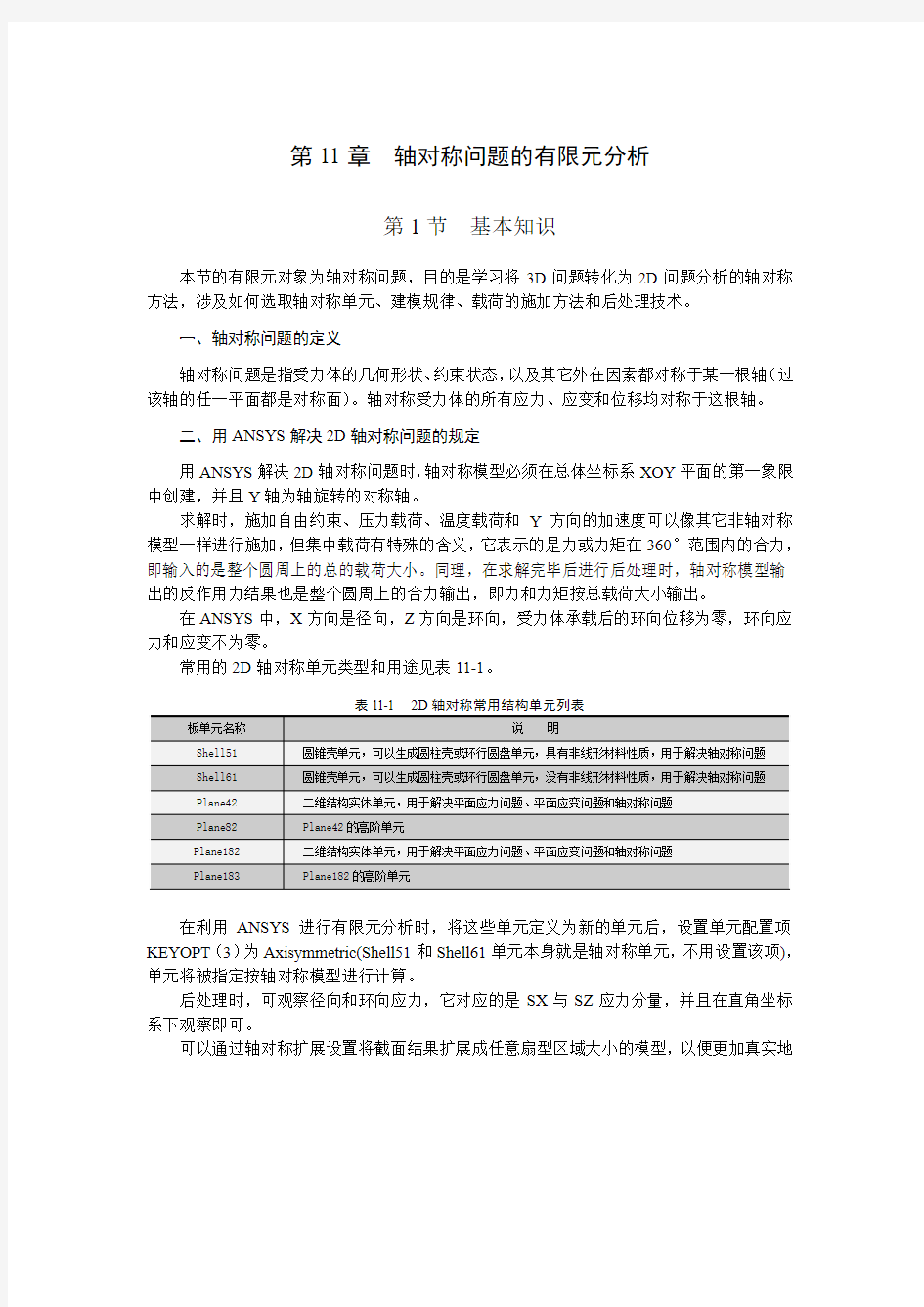
图11-1 圆柱筒壳示意图
一、案例1——圆柱筒的静力分析
问题
如图11-1所示,圆柱筒材质为A3钢,受1000 N/m的压力作用,其厚度为0.1 m,直径12 m,高度为16 m,并且圆柱筒壳的下部轴线方向固定,其它方向自由,试计算其变形、径向应力和轴向应力。
条件
弹性模量为2.0×1011 N/m2,泊松比为0.3。
解题过程
以圆柱筒底部中心为坐标原点,建立直角坐标系如图11-1所示,标出主要点(1点和2点)的坐标,为实体造型做好准备。
制定分析方案。分析类型为线弹性性材料,结构静力分析,轴对称问题,由于受力题为圆柱壳,选用Shell51单元,筒的厚度为0.1 m为单元的实常数;边界条件为圆柱筒下部施加轴线方向固定支撑,2点的受力为1000*12*π等于37699 N。
p=1000 N/m
1.ANSYS分析开始准备工作
(1)清空数据库并开始一个新的分析选取Utility>Menu>File>Clear & Start New,弹
出Clear database and Start New对话框,单击OK按钮,弹出Verify对话框,单击OK按钮完成清空数据库。
(2)指定新的工作文件名指定工作文件名。选取Utility>Menu> File>Change Jobname,
弹出Change Jobname对话框,在Enter New Jobname项输入工作文件名,本例中输入的工作文件名为“yuanzhutong”,单击OK按钮完成工作文件名的定义。
(3)指定新的标题指定分析标题。选取Utility>Menu>File>Change Title,弹出Change
Title对话框,在Enter New Title项输入标题名,本例中输入“shell problem”为标题名,然后单击OK按钮完成分析标题的定义。
(4)重新刷新图形窗口选取Utility>Menu>Plot>Replot,定义的信息显示在图形窗口中。
(5)定义结构分析运行主菜单Main Menu>Preferences,出现偏好设置对话框,赋值分析模块为Structure结构分析,单击OK按钮完成分析类型的定义。
2.定义单元
运行主菜单Main Menu>Preprocessor>Element Type>Add/Edit/ Delete命令,弹出Element Types对话框,单击“Add”按钮新建单元类型,弹出Library of Element Types对话框,先选择单元大类为Shell,接着选择2D axisSymmetr 51(Shell51),单击OK按钮,完成单元类型选择,单击Close按钮完成设置,如图11-2所示。
图11-2 定义单元类型Shell
3.定义实常数
运行主菜单Main Menu>Preprocessor>Real Constants Add/Edit/Delete命令,弹出实常数定义对话框,单击Add按钮进入实例常量输入对话框,在TK(I)项输入板厚(实例常数)0.1米,单击OK按钮完成实例常量输入。回到实例常量对话框,此时显示出新建编号为1的实例常量,单击Close按钮完成输入,如图11-3所示。
4.定义材料属性
运行主菜单Main Menu>Preprocessor>Material Props>Material Models命令,系统显示材料属性设置对话框,在材料属性对话框中依次选择Structure、Linear、Elastic、Isotropic,如图11-4所示。
完成选择后,弹出材料属性输入对话框,分别输入弹性模量2e11,泊松比0.3,如图11-5所示,单击OK按钮完成材料属性输入并返回图11-4。
完成材料属性设置后,单击对话框右上方“X”按钮离开材料属性设置。
图11-3 定义实常量
1
2
3
4
图11-4 进入材料属性设置
图11-5 定义材料属性
5.建立几何图形
(1)创建关键点运行主菜单Main Menu>Preprocessor>Modeling>Create>Keypoints>In
active CS命令弹出创建关键点对话框,在对话框中分别输入关键点编号1,X=6,Y=0,Z=0,单击Apply按钮定义第一点,如图11-6所示。
在对话框中分别输入关键点编号2,X=6,Y=16,Z=0,单击OK按钮定义第二点,如图11-7所示。
(2)创建圆柱筒母线运行主菜单Main Menu>Preprocessor>Modeling>Create>lines>
Lines>Straight Line命令,在弹出的拾取对话框中分别拾取1点和2点,单击OK按钮完成圆柱筒母线绘制,图11-8所示。
图11-6 定义关键点1
图11-7 定义关键点2
图11-8 圆柱筒母线绘制
6.划分网格
运行主菜单Main Menu>Preprocessor>Meshing>MeshTool(网格划分工具)命令,出现MeshTool菜单,单击Lines中的Set按钮,出现选择拾取对话框,单击Pick All按钮选择所有线,在单元尺寸控制对话框中的No. of element divisions项中输入线的等分数为8,其它项默认,单击OK按钮确定。单击Mesh按钮划分网格,在出现的Mesh Lines对话框中单击Pick All按钮,系统将自动完成网格划分。
运行菜单Utility Menu> PlotCtrls> Numbering弹出Plot Numbering Controls选择对话框,
显示单元编号,设置如图11-9所示,单击OK按钮完成设置,划分网格结果如图11-10所示。
图11-9 设置显示单元编号
图11-10 划分网格结果
7.加载
(1)施加约束运行主菜单Main Menu>Solution>Define Loads>Apply>Structural> Displacement>On Keypoints命令,出现拾取菜单,选择关键点1,单击OK按钮出现约束定义对话框,如图11-11所示,选择UY约束Y方向自由度,在Displacement Value选项输入0,其它项默认,再单击OK按钮,完成约束定义。
(2)施加载荷运行主菜单Main Menu>Solution>Define Loads>Apply>Structural> Force/Moment>On Keypoints命令,出现拾取菜单,拾取关键点2,单击OK按钮出现载荷定义对话框,如图11-12所示,载荷类型为FY,载荷数值为-37699 N,再单击OK按钮完成载
荷的施加,结果如图11-13所示。
图11-11 施加约束
图11-12 施加载荷
图11-13 施加约束和载荷结果
8.求解
运行主菜单Main Menu>Solution>Current LS命令,出现Solve Current Load Step对话框,单击/STAT Command窗口菜单/STAT Command>File>Close关闭/STAT Command窗口,然后单击Solve Current Load Step菜单中OK按钮确定,计算机开始进行求解,求解完成后出现“Solution is done”提示表示求解完成,单击Close按钮完成求解。
选择菜单路径Main Menu>Finish退出求解器。
8.查看分析结果
(1)扩展获得360度模型运行下拉菜单Utility Menu> PlotCrls>Style> Symmetry
Expansion>2D Axis-Symmetric弹出轴对称扩展设置对话框,选择Full expansion,单击OK 按钮完成操作,图形窗口将显示扩展后的图形。
(2)打开单元形状显示开关运行下拉菜单Utility Menu> PlotCrls>Style> Size and
Shape弹出Size and Shape对话框,将Display of element shapes based on real constant descriptions设置为On即打开状态,将Replot upon OK/Apply设置为Replot,单击OK按钮完成操作,图形窗口将显示图形的截面形状。
(3)显示节点(单元)位移云图运行主菜单Main Menu>General Postproc>Plot Results>
Contour Plot>Nodal Solu(or Element Solu)命令,选择DOF Solution>Displacement Vector sum 合位移,单击OK按钮,节点位移云图如图11-14所示。
(4)显示径向应力(SX)运行主菜单Main Menu>General Postproc>Plot Results>
Contour Plot>Nodal Solu(or Element Solu)命令,选择Stress>X-Component stress径向应力,单击OK按钮,节点应力云图如图11-15所示。
(5)显示环向应力(SZ)运行主菜单Main Menu>General Postproc>Plot Results>
Contour Plot> Nodal Solu(or Element Solu)命令,选择Stress> Z-Component stress环向应力,单击OK按钮,节点应力云图如图11-16所示。
图11-14 显示变形图
图11-15 径向应力(SX)等值云图
二、案例2——飞轮的静力分析
如图11-17所示是一飞轮的截面图。飞轮角速度为62.8 rad/s,飞轮边缘受压力作用,压
力p为1MPa,飞轮轴孔固定,飞轮尺寸如图(单位为mm),试进行静力分析。
条件
弹性模量为210GPa ,泊松比为0.27,密度为7800kg/m 3。
图11-17 飞轮截面图
解题过程
建立直角坐标系如图11-17所示,算出1—7点的坐标为实体造型做好准备。
制定分析方案。分析类型为线弹性性材料,结构静力分析,轴对称问题,采用板单元,选用Plane82单元;边界条件飞轮的角速度引起的惯性和飞轮边缘受的压力。
1.ANSYS 分析开始准备工作
(1)清空数据库并开始一个新的分析 选取Utility>Menu>File>Clear & Start New ,弹出Clear database and Start New 对话框,单击OK 按钮,弹出Verify 对话框,单击OK 按钮完成清空数据库。
(2)指定新的工作文件名 指定工作文件名。选取Utility>Menu> File>Change Jobname ,弹出Change Jobname 对话框,在Enter New Jobname 项输入工作文件名,本例中输入的工作文件名为“feilun ”,单击OK 按钮完成工作文件名的定义。
(3)指定新的标题 指定分析标题。选取Utility>Menu>File>Change Title ,弹出Change Title 对话框,在Enter New Title 项输入标题名,本例中输入“axisymmetric problem ”为标Y
O
题名,然后单击OK按钮完成分析标题的定义。
(4)重新刷新图形窗口选取Utility>Menu>Plot>Replot,定义的信息显示在图形窗口中。
2.确定分析类型
运行主菜单Main Men>preferences弹出分析类型设定对话框,选择分析模块为Structural 结构分析,然后单击OK按钮完成分析类型定义。
3.定义单元及材料属性
(1)新建单元类型运行主菜单Main Menu>Preprocessor>Element Type>Add/Edit/
Delete命令,弹出Element Types对话框,单击Add按钮新建单元类型,弹出Library of Element Types对话框,先选择单元大类为Solid,接着选择Quad 8node 82(plane82),单击OK按钮,完成单元类型选择,如图11-18所示。
接着单击Option按钮进入单元设置选项,在Element behavior(K3)栏中更改选项为Axisymmetric(轴对称),在单击OK按钮返回Element Type对话框,单击Close按钮完成设置,如图11-19所示。
(2)定义材料属性运行主菜单Main Menu>Preprocessor>Material Props>Material
Models命令,系统显示材料属性设置对话框,在材料属性对话框中依次选择Structure、Linear、Elastic、Isotropic,如图11-20所示。
完成选择后,弹出材料属性对话框图11-21,分别输入弹性模量210e9,泊松比0.27,单击OK返回图11-20,选择Densiy,弹出密度定义对话框图11-22,输入密度7800,单击OK按钮返回。完成材料属性设置后,单击对话框右上方“X”按钮离开材料属性设置。
图11-18 定义单元类型plane82
目录 摘要 (1) 1引言 (1) 2 简要介绍有限元和极限平衡方法 (1) 3影响边坡稳定性的因素 (2) 3.1水位下降速度的影响 (2) 3.2 不排水粘性土对边坡失稳的影响 (5) 3.3 裂缝位置的影响 (9) 4 总结和结论 (12)
基于有限元法和极限平衡法的边坡稳定性分析 摘要:相较于有限元分析法,极限平衡法是一种常用的更为简单的边坡稳定性分析方法。这两种方法都可用于分析均质和不均质的边坡,同时考虑了水位骤降,饱和粘土和存在张力裂缝的条件。使用PLAXIS8.0(有限元法)和SAS-MCT4.0(极限平衡方法)进行了分析,并对两种方法获得的临界滑动面的安全系数和位置进行了比较。 关键词:边坡稳定;极限平衡法;有限元法;PLAXIS;SAS-MCT 1.引言 近年来,计算方法,软件设计和高速低耗硬件领域都得到快速发展,特别是相关的边坡稳定性分析的极限平衡法和有限元方法。但是,使用极限平衡方法来分析边坡,可能会在定位临界滑动面(取决于地质)时出现几个计算困难和前后数值不一致,因此要建立一个安全系数。尽管极限平衡法存在这些固有的局限性,但由于其简单,它仍然是最常用的方法。然而,由于个人电脑变得更容易获得,有限元方法已越来越多地应用于边坡稳定性分析。有限元法的优势之一是,不需要假设临界破坏面的形状或位置。此外,该方法可以很容易地用于计算压力,位移,路堤空隙压力,渗水引起的故障,以及监测渐进破坏。 邓肯(1996年)介绍了一个综合观点,用极限平衡和有限元两种方法对边坡进行分析。他比较了实地测量和有限元分析的结果,并且发现一种倾向,即计算变形大于实测变形。Yu 等人(1998年)比较了极限平衡法和严格的上、下界限法对于简单土质边坡的稳定性分析的结果,同时,他们也将采用毕肖普法和利用塑性力学上、下限原理的界限法得到的结果进行了比较。Kim等人(1999年)同时使用极限平衡法和极限分析法对边坡进行分析,发现对于均质土边坡,得自两种方法的结果大体是一致的,但是对于非均质土边坡还需要进行进一步分析工作。Zaki(1999年)认为有限元相对于极限平衡法更显优势。Lane和Griffiths (2000年) 提出一个看法,用有限元方法在水位骤降条件下评价边坡的稳定性,应绘制出适用于实际结构的操作图表。Rocscience有限公司(2001年)提出了一个文件,概述了有限元分析方法的能力,并通过与各种极限平衡方法的结果比较,提出了有限元方法更为实用。Kim等人(2002年)用上、下界限法和极限平衡法分析了几处非均质土体且几何不规则边坡的剖面。这两种方法给出了类似有限元分析法产生的安全系数,临界滑动面位置。 2.简要介绍有限元和极限平衡方法 有限元法(FEM)是一个应用于科学和工程中,求解微分方程和边值问题的数值方法。进一步的细节,读者可参考Clough和Woodward(1967年),Strang和Fix(1973年),Hughes(1987年),Zienkiewicz和Taylor(1989年)所做的研究工作。 PLAXIS 8版(Brinkgreve 2002年)是一个有限元软件包,应用于岩土工程二维的变形和 折稳定性分析。该程序可以分析自然成型或人为制造的斜坡问题。安全系数的确定使用c
中考数学几何模型7:轴对称最值模型名师点睛拨开云雾开门见山
B' Q D A' A P B C
典题探究启迪思维探究重点例题1. 如图,在矩形ABCD中,AB=10,AD=6,动点P满足S△P AB=S矩形ABCD,则点P到A,B两点距离之和P A+PB的最小值为. 变式练习>>> 1.如图Rt△ABC和等腰△ACD以AC为公共边,其中∠ACB=90°,AD=CD,且满足AD⊥AB,过点D 作DE⊥AC于点F,DE交AB于点E,已知AB=5,BC=3,P是射线DE上的动点,当△PBC的周长取得最小值时,DP的值为()
A.B.C.D. 例题2. 如图所示,凸四边形ABCD中,∠A=90°,∠C=90°,∠D=60°,AD=3,AB=,若点M、N分别为边CD,AD上的动点,求△BMN的周长的最小值. 变式练习>>> 2.如图,点P是∠AOB内任意一点,且∠AOB=40°,点M和点N分别是射线OA和射线OB上的动点,当△PMN周长取最小值时,则∠MPN的度数为()
A.140°B.100°C.50°D.40° 例题3. 如图,在△ABC中,∠C=90°,CB=CA=4,∠A的平分线交BC于点D,若点P、Q分别是AC 和AD上的动点,则CQ+PQ的最小值是. 变式练习>>> 3.如图,已知等边△ABC的面积为4,P、Q、R分别为边AB、BC、AC上的动点,则PR+QR的最小
值是() A.3B.2C.D.4 例题4. 如图,∠MON=30°,A在OM上,OA=2,D在ON上,OD=4,C是OM上任意一点,B是ON上任意一点,则折线ABCD的最短长度为. 变式练习>>> 4. 如图,在长方形ABCD中,O为对角线AC的中点,P是AB上任意一点,Q是OC上任意一点,已知:
目录 摘要 ............................................................................................ 错误!未定义书签。Abstract (2) 第一章分析方法和研究对象 ........................................... 错误!未定义书签。 1.1 有限单元法的概述....................................................... 错误!未定义书签。 1.1.1 有限单元法的历史 (4) 1.1.2 有限单元法的基本概念 (4) 1.2 ANSYS软件简介 (4) 1.2.1 ANSYS主要应用领域 (4) 1.2.2 ANSYS操作界面 (5) 1.2.3 ANSYS的主要功能 (6) 1.2.4 ANSYS主要特点 (7) 1.3 曲柄滑块机构简介 (7) 1.3.1 曲柄滑块定义 (8) 1.3.2 曲柄滑块机构特性应用以及分类 (8) 第二章曲柄滑块机构的求解 (10) 2.1 曲柄滑块机构的问题描述 (10) 2.2 曲柄滑块机构问题的图解法 (10) 2.2.1 图解法准备工作 (11) 2.2.2 图解法操作步骤 (11) 第三章有限元瞬态动力学概述 (14) 3.1 有限元瞬态动力学定义 (14) 3.2 瞬态动力学问题求解方法........................................... 错误!未定义书签。 3.2.1 完全法 (14) 3.2.2 模态分析法 (14) 3.2.2 缩减法 (15) 3.1 有限元结构静力学分析基本概念 (15) 3.1 有限元结构静力学分析步骤 (16) 第四章曲柄滑块的有限元瞬态动力学分析 (17) 4.1 曲柄滑块机构瞬态简要概述 (17) 4.2曲柄滑块有限元瞬态动力学分析步骤 (18)
思考题 5-1 轴对称问题的定义 答:工程中又一类结构,其几何形状、边界条件、所受载荷都对称于某一轴线,这种情况下结构再载荷作用下位移、应变和应力也对称于这个轴线,这种问题成为轴对称问题。 5-2 轴对称问题一般采用的坐标系?作图说明每个坐标分量的物理意义 答:在描述轴对称弹性体问题的应力及变形时常采用圆柱坐标r,θ,z。 各位移分量是那几个自变量的函轴对称问题中每个点有几个位移分量? 5-3 数?的函数,与θ无关。都只是rz答:位移分量u, w, 轴对称问题中的每个点有哪几个应力分量?是那几个自变量的函数。5-4 4答:个应力分量; 5-5 轴对称问题中的每个点有哪几个应变分量?是那几个自变量的函数 答:4个应变分量 轴对称问题是三维问题?二维问题?最简单的轴对称单元是哪种单5-6
元?作图说明等于零。因此轴对称问题是二维问v答:由于轴对称,沿θ方向的环向(周向)位移平面(子午面)正交的截面r z题;三角形环单元。(三角形轴对称单元,这些圆环单元与是三角形) 写出三角形环单元的位移函数。满足完备性要求吗?5-7 答:满足完备性要求。 三角形环单元形函数的表达式?指出形函数的性质。5-8 三角形环单元的应力和应变的特点。其单元刚度矩阵是几阶的?5-9 个正应力分量均随位置变化;答:应力分量:剪应力为常量,其他3个应变分量为常量,环向应变不是常应变,而是与单应变分量:面内(子五面)3 元中各点的位置有关。单元刚度矩阵为六阶。有限元方法求解对称问题的基本步骤?5-10 结构离散化:对整个结构进行离散化,将其分割成若干个单元,单元间彼此通过节点相1. 连; {F}(e){Φ}(e)[K](e) 2.求出各单元的刚度矩阵:[K](e)是由单元节点位移量求单元节点力向量的转移矩阵,其关系式为:{F}(e)= [K](e) {Φ}(e);{Φ}集成总体刚度矩阵 3.[K]并写出总体平衡方程:总体刚度矩阵[K]是由整体节点位移向量求整体节点力向量,此即为总体平衡方程。{F}= [K] {Φ} 的转移矩阵,其关系式为沿某个方向n4.引入支撑条件,求出各节点的位移:节点的支撑条件有两种:一种是节点沿某个方向的位移为一给定值。的位移为零,另一种是节点n 求出各单元内的应力和应变 5. 对于有限元方法,其基本思路和解题步骤可归纳为:建立积分方程,根据变分原理或方程余量与权函数正交化原理,建立与微分方程初边
数学八年级上册 【几何模型三角形轴对称】试卷专题练习(word 版 一、八年级数学全等三角形解答题压轴题(难) 1.取一副三角板按图()1拼接,固定三角板60,()30ADC D ACD ∠=∠=,将三角板 45()ABC BAC BCA ∠=∠=绕点A 依顺时针方向旋转一个大小为a 的角00) 45(a ≤≤得到ABM ,图()2所示.试问: ()1当a 为多少时,能使得图()2中//AB CD ?说出理由, ()2连接BD ,假设AM 与CD 交于,E BM 与CD 交于F ,当00 )45(a ≤≤时,探索 DBM CAM BDC ∠+∠+∠值的大小变化情况,并给出你的证明. 【答案】(1)15°;(2)DBM CAM BDC ∠+∠+∠的大小不变,是105,证明见解析. 【解析】 【分析】 (1)由//AB CD 得到30BAC C ∠=∠=,即可求出a ; (2)DBM CAM BDC ∠+∠+∠的大小不变,是105?,由FEM CAM C ∠=∠+∠, 30C ∠=?, EFM BDC DBM ∠=∠+∠, 45M ∠=?,即可利用三角形内角和求出答案. 【详解】 ()1当a 为15时,//AB CD , 理由:由图()2,若//AB CD ,则30 BAC C ∠=∠=, 453015a CAM BAM BAC ∴=∠=∠-∠=-?=?, 所以,当a 为15时,//AB CD . 注意:学生可能会出现两种解法:
第一种:把//AB CD 当做条件求出a 为15, 第二种:把a 为15当做条件证出//AB CD , 这两种解法都是正确的. ()2DBM CAM BDC ∠+∠+∠的大小不变,是105? 证明: ,30FEM CAM C C ∠=∠+∠∠=?, 30FEM CAM ∴∠=∠+?, EFM BDC DBM ∠=∠+∠, DBM CAM BDC EFM CAM ∴∠+∠+∠=∠+∠, 180,45EFM FEM M M ∠+∠+∠=∠=?, 3045180BDC DBM CAM ∴∠+∠+∠+?+?=?, 1803045105DBM CAM BDC ∴∠+∠+∠=?--=?, 所以,DBM CAM BDC ∠+∠+∠的大小不变,是105. 【点睛】 此题考查旋转的性质,平行线的性质,三角形的外角定理,三角形的内角和,(2)中将角度和表示为三角形的外角是解题的关键. 2.已知:在平面直角坐标系中,A 为x 轴负半轴上的点,B 为y 轴负半轴上的点. (1)如图1,以A 点为顶点、AB 为腰在第三象限作等腰Rt ABC ?,若2OA =,4OB =,试求C 点的坐标; (2)如图2,若点A 的坐标为() 23,0-,点B 的坐标为()0,m -,点D 的纵坐标为n ,以 B 为顶点,BA 为腰作等腰Rt ABD ?.试问:当B 点沿y 轴负半轴向下运动且其他条件都不 变时,整式2253m n +-化,请说明理由; (3)如图3,E 为x 轴负半轴上的一点,且OB OE =,OF EB ⊥于点F ,以OB 为边作等边OBM ?,连接EM 交OF 于点N ,试探索:在线段EF 、EN 和MN 中,哪条线段等于EM 与ON 的差的一半?请你写出这个等量关系,并加以证明.
轴对称问题的有限元 模拟分析
一、摘要: 轴对称问题是弹性空间问题的一个特殊问题,这类问题的特点是物体为某一平面绕其中心轴旋转而成的回转体。由于一般形状是轴对称物体,用弹性力学的解析方法进行应力计算,很难得到精确解,因此采用有限元法进行应力分析,在工程上十分需要,同时用有限元法得到的数值解,近似程度也比较好。 轴对称问题的有限元分析,可以将要分析的问题由三维转化为二维平面问题来解决。先是结构离散,然后是单元分析,再进行总纲集成,再进行载荷移置,最后是约束处理和求解线性方程组。分析完成之后用ABAQUS软件建模以及分析得出结果。 关键字:有限元法轴对称问题ABAQUS软件 二、前言: 1、有限元法领域介绍: 有限单元法是当今工程分析中获得最广发应用的
数值计算方法,由于其通用性和有效性,受到工程技术界的高度重视,伴随着计算机科学和技术的快速发展,现在已经成为计算机辅助设计和计算机辅助制造的重要组成部分。 由于有限元法是通过计算机实现的,因此有限元程序的编制以及相关软件的研发就变得尤为重要,从二十世纪五十年代以来,有限元软件的发展按目的和用途可分为专用软件和大型通用商业软件,而且软件往往集成了网络自动划分,结果分析和显示等前后处理功能,而且随着时间的发展,大型通用商业软件的功能由线性扩展到非线性,由结构扩展到非结构等等,这一系列强大功能的实现与运用都要求我们对有限元法的基础理论知识有较为清楚的认识以及对程序编写的基本能力有较好掌握。 2、研究报告目的: 我们小组研究的问题是:圆柱体墩粗问题。毛坯的材料假设为弹塑性,弹性模量210000MPa,泊松比0.3,塑性应力应变为
MD Nastran突破有限元分析的极限 作者:MSC.Software公司来源:汽车制造业 有限元法FEM分析变得日益复杂,同时有限元分析模型的大小和细节设计要求也在不断增加。尤其是在汽车行业,这一趋势尤其明显。 项目背景 由数百万个单元和数百万的自由度组成的有限元网格的模型已经变得司空见惯,然而模型的尺寸仍在不断地增加。由于数学方法和软件工程学技术的改进,有限元法程序的工作效率和计算能力也在不断提升,同时构建模型和网格划分软件技术的飞速进步使模型的生成变得更加方便快捷。数年前,发动机引擎气缸体的网格划分需要几个月的时间,而现在只是几个小时的问题。 德国汽车制造商宝马公司是大范围使用虚拟仿真技术的公司之一。在宝马公司和其他一些制造商中,为了缩短研发周期,减少物理样机和物理试验的次数,完整的汽车模型得到了最优化的使用,其基础便是日益复杂的有限元仿真模型,包括对噪音和舒适度的刚性评定、乘客安全性和空气动力学仿真等。在数值计算方法方面,使用了隐式线性分析和显式非线性瞬态分析。 图1 “后天之模型”的基础是宝马X3汽车的车体 早在2007年初,宝马公司便对计算机辅助工程CAE的流程重新进行了检测,以便发现将来可能由仿真模型尺寸增加引起的瓶颈问题。宝马公司的车体和零部件设计小组开发了迄今为止最大的有限元法模型作为基准测试的考题模型,被冠以“后天之模型(Model of the
Day After Tomorrow)”的名称。小组成员丹尼尔·海泽尔博士表示,“对我们来说,在标准的硬件和软件设备上进行此次基准测试是非常重要的,使用当前的基础设施解决基准模型问题的目的,并不是为了要减少计算时间,而是为了识别理论极限和当前方法的瓶颈。” 基准考题的目的是为了寻找标准分析(双载荷工况条件下的线性静态分析)中进行有限元法分析基本步骤的极限和时间: 1. 读取输入数据,对它们进行分类、制成表格,并进行一致性检查; 2. 计算单元刚体矩阵,并集成一个整体刚体矩阵; 3. 计算位移和应力数据; 4. 输出结果。 宝马公司提出的问题是有限元分析还能应对这一增长趋势多长时间?用“后天之模型”作为考题的目的是如何突破近10年间所要面临的硬件和软件极限问题。MSC.Software公司同美国国际商用机器IBM公司合作,能够在短短的几个月的时间内解决这一问题。在一份用该模型分析的详细报告中,项目成员彼得·沙尔茨和杰拉德·希姆莱(MSC.Software公司),丹尼尔·海泽尔(宝马汽车制造公司)和D·皮特施(IBM公司)详细介绍了他们实现宝马公司苛刻要求的方法。 图2 BMW X3减振器支座外壳模型(蓝色),MODAW部分描绘图(黄色) 软、硬件的发展 大多数有限元法分析程序都存在计算能力不在最佳状态的情形。1957年,雷W克拉夫和他的学生在一台内存只有16位的IBM701计算机上开发出了后来成为有限元法的程序。方程式大约在40个以上的问题需要out of core(即数据不全部存储在内存中,而是存储在硬盘的临时文件夹中)求解逻辑,这意味着要借助二级存储介质。10年之后,Nastran软件被开发出来之后,要求条件也非常类似。软件客户美国国家航空航天局(NASA)要求开
利用轴对称模型求线段和的最小值 近几年来,最小值问题成为中考命题的热点,其中有些问题的解决常用构建轴对称模型的方法。 学习目标:知识目标:掌握轴对称图形的做法和三角形三边的关系,根据问题建构数学模 型,解决实际问题。 能力目标:通过观察、分析、对比等方法,提高学生分析问题,解决问题的能力, 进一步强化分类归纳综合的思想,提高综合能力。 情感目标:通过自己的参与和教师的指导,享受学习数学的快乐,提高应用数学 的能力。 引例:例:如图(1),草原上两居民点A ,B 在笔直河流l 的同旁,一汽车从A 处出发到B 处,途中需要到河边加水,问选在何处加水可使行驶的路程最短?并在途中画出这一点。 分析:将这一问题转化为数学问题,即已知直线l 及l 同侧的点A 和点B ,在l 上确定一点C,使AC+BC 最小。 首先我们思考若点A 和B 点分别在直线l 的两侧,则点C 的位置应如何确定,根据两点之间线段最短,点C 应是与AB 直线l 的交点,如图(2),这就是说,设线段AB 交l 于点C ,点C /是直线上异于点C 的任意一点,总有AC+BC <AC /+BC /。因此,解决上述问题的关键是将点A (或点B )移至l 的另一侧(设点A 移动后的点为A /),且使A 、A /到直线l 上任意点的距离相等,利用轴对称可达到这一目的。 解:如图(3),作点A 关于直线l 的对称点A /,连接A /B 交l 于点C ,则点C 的位置就是汽车加水的位置,即汽车选在点C 处可使行驶的路程最短。 (1)A B A
总结:作点A 关于直线l 的对称点A ′,连结A ′B 交直线l 于点C ,那么点C 就是所求作的点。轴对称在本题中的主要作用是将线段在保证长度不变的情况下改变位置,要注意体会轴对称在这方面的应用。以此作为模型我们可以解决下列求最小值的问题。 例1. 如图4,菱形ABCD 中,AB=2,∠BAD=60°,E 是AB 的中点,P 是对角线AC 上的一个动点,则PE+PB 的最小值是________。 图4 分析:首先分解此图形,构建如图5模型,因为E 、B 在直线AC 的同侧,要在AC 上找一点P ,使PE+PB 最小,关键是找出点B 或E 关于AC 的对称点。如图6,由菱形的对称性可知点B 和D 关于AC 对称,连结DE ,此时DE 即为PE+PB 的最小值, 图5 图6 由∠BAD=60°,AB=AD ,AE=BE 知, 3 22 3DE =?= 故PE+PB 的最小值为 3 。 跟踪练习1: 如图7,已知点A 是半圆上一个三等分点,点B 是弧AN 的中点,点P 是半径
用ANSYS进行四连杆机构的有限元分析 作者:谭辉 日期:08年3月6日 分析目的 1、利用ANSYS对典型的四连杆机构进行分析,主要包含各点的轨迹分 析,例如X和Y方向的位移等。 2、为五连杆和六连杆机构的分析提供可行的分析方法以及原型代码。 问题简述 分析主动杆1绕节点1旋转一周时节点4的运动轨迹,杆2和杆3为从动杆,具体问题见下图:
分析思路 1、根据分析目的,在ANSYS选用link1单元进行单元建模,主要考虑 是link1单元具有X和Y方向的自由度,可以获得各个节点的位移轨迹。 之后可以用梁单元等实现更高级的分析目的,例如获得杆上的力,位移, 加速度等相关信息。 2、该模型结构简单,可以利用直接建模方法进行有限元系统建模,主 要命令:N,E。 3、利用自由度耦合对重合节点进行建模,例如节点2和节点3、节点4 和节点5进行建模,主要命令:cpintf,利用该命令可以一次性将重合节 点生成自由度耦合。 4、利用表数组对于杆1(主动杆)的节点2进行瞬态边界条件的载荷施 加,分析类型为瞬态分析,主要命令:*dim,d等。 5、生成节点位移的对应变量,从而获得节点4的随时间的位移曲线, 主要命令:nsol,plvar等。 命令流如下 行号命令符号注释 结束上一次的分析 1finish ! 清除数据库,并读取启动配置文件2/clear,start ! 3 ! 设置图形显示的背景颜色 4/color,pbak,on,1,5 ! 5 !
6/units,si ! 设置单位制:国际单位制 7*afun,deg ! 设置三角函数运算采用度为单位 8 ! 9/prep7 ! 进入前处理模块 10et,1,link1 ! 设置单元类型:link1 11mp,ex,1,2.07e11 ! 设置材料的弹性模量 12r,1,1 ! 设置单元的实常数,面积为1 13n,1,0,0,0 ! 在(0,0,0)处建立节点1 14n,2,3,0,0 ! 在(3,0,0)处建立节点2 15n,3,3,0,0 !在(3,0,0)处建立节点3,和节点2重合 16n,4,8,7,0 ! 在(8,7,0)处建立节点4 17n,5,8,7,0 !在(8,7,0)处建立节点4,和节点4重合 18n,6,10,0,0 ! 在(10,0,0)处建立节点6 19e,1,2 ! 建立单元1(连接节点1和2) 20e,3,4 ! 建立单元2(连接节点3和4) 21e,5,6 ! 建立单元3(连接节点5和6) 22 ! 23cpintf,all,1e-3 !对于重合节点一次性的建立耦合自由度,容差1e-3 24 ! 25/pnum,node,1 ! 显示节点编号 26/pnum,elem,1 ! 显示单元编号 27eplot ! 显示单元
风力发电机组轮毂极限强度的有限元分析 文章是基于有限元理论,对兆瓦级风力发电机组的轮毂进行强度及疲劳计算。轮毂是风力发电机中的重要组成部分,铸造而成,是将机械能转换为电能的核心部件,其形状复杂,轮毂的设计质量会直接影响到整个机组的正常运行及使用寿命,在其受复杂风载荷的作用下,其强度和疲劳耐久性成为此行业关注的焦点。此分析利用大型有限元分析软件Ansys对轮毂模型分析。模型中包含轮毂、主轴及叶片,从轮毂的应力分布情况,从中找出最危险的部位,为轮毂的设计提供可靠依据。 标签:风力发电机;轮毂;有限元分析;极限强度 1 绪论 1.1 课题研究背景 经济发展过程中,我国作为世界上人口最多的发展中国家,能源消耗量不断增加,传统化石能源无以为继,面临的能源开发利用的资源约束越来越多,环境压力也越来越大。如今,生态环境承载能力弱、资源相对紧张。传统能源利用导致的环境问题越来越严重,以及全国范围内的雾霾天气都在提醒我们要努力做到全面、协调、可持续发展,以符合当今国情。在众多的可再生能源中,风能以其巨大的优越性和发展潜力受到人们的瞩目。 1.2 轮毂在大型风力发电机组的重要性 在大型风力发电机组中,轮毂是核心构件,其不仅承担着与驱动连的链接,而且将叶片所受的风载荷通过主轴传递给齿轮箱,承担着风力发电机组容量增大而带来的更大的负荷。它需要有足够的强度和刚度,以保证机组在各种工况下能正常运行。由此可看出轮毂在风力发电机组的设计和制造过程中的重要性。 2 轮毂的强度校核计算 2.1 轮毂模型介绍 轮毂模型结构见图1 此机组风轮由三片叶片对称安装在轮毂上构成,叶片间的夹角为120°。利用CAD绘图软件Solidworks,绘制了轮毂的三维实体几何简化模型。在保证计算精度的前提下,由于小的孔类、圆角及小凸台类结构对计算结果影响很小并且不是关键部位,已经略去。叶片产生的气动载荷以及由于风轮旋转和机舱对风轮转动引起的离心力、惯性力和重力通过三片叶片连接点传递到轮毂上,这些载荷和轮毂自身的重力构成了轮毂载荷。最终,轮毂简化后的几何模型如图1所示。
八年级数学【几何模型三角形轴对称】试卷测试与练习(word 解析版) 一、八年级数学 轴对称解答题压轴题(难) 1.定义:如果一条线段将一个三角形分成2个小等腰三角形,我们把这条线段叫做这个三角形的“好线”:如果两条线段将一个三角形分成3个小等腰三角形,我们把这两条线段叫做这个三角形的“好好线”. 理解: (1)如图1,在ABC ?中,AB AC =,点D 在AC 边上,且AD BD BC ==,求A ∠的大小; (2)在图1中过点C 作一条线段CE ,使BD ,CE 是ABC ?的“好好线”; 在图2中画出顶角为45的等腰三角形的“好好线”,并标注每个等腰三角形顶角的度数(画出一种即可); 应用: (3)在ABC ?中,27B ∠=,AD 和DE 是ABC ?的“好好线”,点D 在BC 边上,点 E 在AC 边上,且AD BD =,DE CE =,请求出C ∠的度数. 【答案】(1)36°;(2)见详解;(3)18°或42° 【解析】 【分析】 (1)利用等边对等角得到三对角相等,设∠A=∠ABD=x ,表示出∠BDC 与∠C ,列出关于x 的方程,求出方程的解得到x 的值,即可确定出∠A 的度数. (2)根据(1)的解题过程作出△ABC 的“好好线”;45°自然想到等腰直角三角形,过底角一顶点作对边的高,发现形成一个等腰直角三角形和直角三角形.直角三角形斜边的中线可形成两个等腰三角形;第二种情形以一底角作为新等腰三角形的底角,则另一底角被分为45°和22.5°,再以22.5°分别作为等腰三角形的底角或顶角,易得其中作为底角时所得的三个三角形恰都为等腰三角形; (3)用量角器,直尺标准作27°角,而后确定一边为BA ,一边为BC ,根据题意可以先固定BA 的长,而后可确定D 点,再分别考虑AD 为等腰三角形的腰或者底边,兼顾A 、E 、C 在同一直线上,易得2种三角形ABC ;根据图形易得∠C 的值; 【详解】 解:(1)∵AB=AC , ∴∠ABC=∠C , ∵BD=BC=AD ,
高压SCR试验台结构有限元分析报告一,分析目的 1.1SCR系统管路及试验台的整体强度 1.2SCR系统固定支撑强度 二,分析对象 图1-2 图1-3
1.SCR系统管路系统原理图 图1-1 2. SCR系统管路三维模型 图1-2
图1-3 三,3D模型结构受力分析 2.分析目的 2.1SCR系统管路及试验台的整体强度 2.2SCR系统固定支撑强度 3.分析对象 2.1根据管路系统的原理图(图1-1),分析得出其主要部件如下: 滑动支撑、固定支撑、膨胀节(万向型)、膨胀节(压力平衡型)、 混合器、反应器。 2.2受力分析 2.2.1滑动支撑受力分析 滑动支撑受力为:管道重力+摩擦力+管道内气体重力 经计算该力F较小,计算时可忽略。
2.2.2固定支撑受力分析 固定支撑受力分析 经分析系统对万向型膨胀节的盲板力为20T,反应器工作重力约8.5T。因此下图中三处红圈位置处的固定支撑受力为20T,另有反应器处8.5吨的重力。为本次分析的主要载荷。 除此三个固定点受力外,其他固定支撑点受力较小,暂不分析。 图2-1 四,3D模型结构有限元分析 1.分析方法 基于NX8.5的高级有限元分析 算法选择 求解器:NX NASTRAN 结算方案类型:SOL 101 2.分析过程 2.1.三维模型转化为一维单元线条 20T 20T 8.5T
2.2.一维单元划分网格并附加三维截面及属性 图3-2 其中的划分网格单元: 26772 其中使用的节点: 26577 单元根据实际三维模型附加截面,材料选择为steel 2.3.载荷附加及边界条件固定约束设置
基于ANSYS Workbench的定位卡锁机构有限元分析 摘要本文首先在Pro/E中建立了定位卡锁机构受最大外力时的简化模型,然后将该模型导入到ANSYS Workbench 13平台中进行了有限元模型的分析求解,最后结合求解结果用第四强度理论对定位卡锁机构各零件进行了强度校核,同时对该定位卡锁机构的改进提出了建议。 关键词定位卡锁机构;有限元分析 在某工程项目中应用的定位卡锁机构承担着为某输送设备准确定位的作用。由于该输送设备运行一个周期位就要启停一次,启停工作由定位卡锁机构配合实现。定位卡锁机构收回,输送设备开始运转,一个周期位后电机停转,定位卡锁机构伸出,进入与之配合的凹槽使输送设备完全停位。因此,定位卡锁机构成为该输送设备的关键部件,是保证输送设备正常工作的必备条件。所以,对定位卡锁机构的研究与分析有着重要的意义。 定位卡锁机构在伸出状态受最大外力时,其所受最大应力不应超过材料的许用应力是保证定位卡锁机构实现其功能的充分条件。为了保证定位卡锁机构的工作可靠性,本文利用ANSYS Workbench对该机构进行有限元分析,研究在定位卡锁机构受最大外力时的受力及变形情况,并依据理论知识对其强度进行校核。 1 定位卡锁机构模型的建立与导入 在对定位卡锁机构进行有限元分析之前,首先应建好定位卡锁机构的三维模型。一般在整个有限元分析的过程中,几何建模的工作量占据了非常多的时间,同时也是非常重要的过程[2]。ANSYS Workbench 13中,建模工作主要由ANSYS Workbench 自带的几何建模工具Design Modeler模块完成。对于小型或简单模型的建立可以直接在Design Modeler模块中建模,这样避免了从CAD系统中导入ANSYS的模型可能不能直接进行网格划分,需进行大量修补完善工作的麻烦。对于零部件较多的装配体的建模,通常先利用专业的三维建模软件完成模型的建立,然后再把它导入到ANSYS中进行分析。这样,工程技术人员就可以使用自己擅长的CAD软件建好模型,从而避免了重复现有CAD模型的劳动。 本文采用PTC公司的Pro/Engineer对定位卡锁机构进行三维建模。定位卡锁机构简化模型由液压缸、卡锁活塞杆、端盖、螺塞、螺钉组成,建好的三维模型如图1所示。建好后的三维模型可以在Pro/E中直接导入到ANSYS Workbench 13 中进行有限元分析。 图1 定位卡锁机构的三维模型 2 定位卡锁机构的有限元分析 2.1 定义模型材料属性
第1节基本知识 本节的有限元对象为轴对称问题,目的是学习将3D问题转化为2D问题分析的轴对称方法,涉及如何选取轴对称单元、建模规律、载荷的施加方法和后处理技术。 一、轴对称问题的定义 轴对称问题是指受力体的几何形状、约束状态,以及其它外在因素都对称于某一根轴(过该轴的任一平面都是对称面)。轴对称受力体的所有应力、应变和位移均对称于这根轴。 二、用ANSYS解决2D轴对称问题的规定 用ANSYS解决2D轴对称问题时,轴对称模型必须在总体坐标系XOY平面的第一象限中创建,并且Y轴为轴旋转的对称轴。 求解时,施加自由约束、压力载荷、温度载荷和Y方向的加速度可以像其它非轴对称模型一样进行施加,但集中载荷有特殊的含义,它表示的是力或力矩在360°范围内的合力,即输入的是整个圆周上的总的载荷大小。同理,在求解完毕后进行后处理时,轴对称模型输出的反作用力结果也是整个圆周上的合力输出,即力和力矩按总载荷大小输出。 在ANSYS中,X方向是径向,Z方向是环向,受力体承载后的环向位移为零,环向应力和应变不为零。 常用的2D轴对称单元类型和用途见表11-1。 表11-1 2D轴对称常用结构单元列表
的高阶单的高阶单 在利用ANSYS进行有限元分析时,将这些单元定义为新的单元后,设置单元配置项KEYOPT(3)为Axisymmetric(Shell51和Shell61单元本身就是轴对称单元,不用设置该项),单元将被指定按轴对称模型进行计算。 后处理时,可观察径向和环向应力,它对应的是SX与SZ应力分量,并且在直角坐标系下观察即可。 可以通过轴对称扩展设置将截面结果扩展成任意扇型区域大小的模型,以便更加真实地观察总体模型的各项结果。 轴对称问题有限元分析实例 2D节2第
人教版八年级上册数学【几何模型三角形轴对称】试卷专题练习(解析版) 一、八年级数学全等三角形解答题压轴题(难) 1.(1)如图1:在四边形ABCD中,AB=AD,∠BAD=120°,∠B=∠ADC=90°.E,F分别是BC,CD上的点.且∠EAF=60°.探究图中线段EF,BE,FD之间的数量关系. 小明同学探究的方法是:延长FD到点G.使DG=BE.连结AG,先证明△ABE≌△ADG,再证明△AEF≌△AGF,可得出结论, 他的结论是(直接写结论,不需证明); (2)如图2,若在四边形ABCD中,AB=AD,∠B+∠D=180°,E、F分别是BC,CD上的点,且∠EAF是∠BAD的二分之一,上述结论是否仍然成立,并说明理由. (3)如图3,四边形ABCD是边长为5的正方形,∠EBF=45°,直接写出三角形DEF的周长. 【答案】(1)EF=BE+DF.(2)成立,理由见解析;(3)10. 【解析】 【分析】 (1)如图1,延长FD到G,使得DG=DC,先证△ABE≌△ADG,得到AE=AG, ∠BAE=∠DAG,进一步根据题意得∠EAF=∠GAF,再证明△AEF≌△AGF,得到EF=FG,最后运用线段的和差证明即可. (2)如图2,延长FD到点G.使DG=BE.连结AG,证得△ABE≌△ADG,得到AE=AG, ∠BAE=∠DAG,再结合题意得到∠EAF=∠GAF,再证明△AEF≌△AGF,得到EF=FG,最后运用线段的和差证明即可. (3)如图3,延长DC到点G,截取CG=AE,连接BG,先证△AEB≌△CGB,得到BE=BG,∠ABE=∠CBG,结合已知条件得∴∠CBF+∠CBG=45°,再证明△EBF≌△GBF,得到 EF=FG,最后求三角形的周长即可. 【详解】 解答:(1)解:如图1,延长FD到G,使得DG=DC
对称结构有限元分析 ----3节点三角形单元的分析 一问题分析(对称框架线弹性实体的静力平衡问题) 图是一个方形弹性实体,单位边长、单位厚度、承受等效竖向压力2 1m,其中边界条 KN 件暗示着存在两组相对称的平面,因此现考虑的仅是问题的。每个节点上的自由度号码代表了各自在x和y方向上可能的位移。 结构和单元信息NELS NCE NN NIP 8 2 9 1 AA BB E V
.5 .55 1.E6 .3 约束节点自由度信息NR 5 K , NF(:,K), I=1,NR 10 1 4 0 1 7 0 0 8 1 9 1 0 载荷信息LOADED_NODES 3 (K, LOADS(NF(:,K)), I=1 , LOADED_NODES) 1 .0 -.25 2 .0 -.5 3 .0 -.25 333 3节点三角形单元网络的总体节点和单元编号 3节三角形单元局部坐标系中节点和自由度编号
二理论基础(有限元方法原理) 通过弹性力学变分原理建立弹性力学问题有限元方法表达格式的基本步骤。最小位能原理的未知场变量是位移,以结点位移为基本未知量,并以最小位能原理为基础建立的有限元为位移元。它是有限元方法中应用最为普遍的单元,也是本书主要讨论的单元。 对于一个力学或无力问题,在建立其数学模型以后,用有限元方法对它进行分析的首要步骤是选择单元形式。平面问题3结点三角形单元是有限元方法最早采用,而且至今仍经常采用的单元形式。我们将以它作为典型,讨论如何应用广义坐标建立单元位移模式与位移插值函数,以及如何根据最小位能原理建立有限元求解方程的原理、方法与步骤,并进而引出弹性力学问题有限元方法的一般表达格式。对于前一问题,着重讨论选择广义坐标和有限元位移模式的一般原则和建立其位移插值函数的一般步骤。对于后一问题,着重讨论单元刚度矩阵和单元载荷向量的形式,总体刚度矩阵和总体载荷向量集成的原理和方法,以及它们各自的特性。 作为一种数值方法,有限元解的收敛性无疑是十分重要的问题,以后将讨论解的收敛准则及其物理意义,所阐明的原则在以后还将得到进一步的应用和具体化。 在建立了有限元的一般表达格式以后,原则上可以将它推广到平面问题以外的其他弹性力学问题和采用任何形式的单元。轴对称问题具有很广泛的应用领域,轴对称问题3结点三角形 单元的表达格式可以看作是平面问题此种单元表达格式的直接推广。 一)弹性力学平面问题的有限元格式 结点三角形单元是有限元方法中最早提出,并且至今仍广泛应用的单元,由于三角形单元对复杂边界有较强的适应能力,因此很容易将一个二维离散成有限个三角形单元,如图1所示。在边界上以若干段直线近似原来的曲线边界,随着单元增多,这种拟合将趋于精确。我们在讨论如何应用有限元方法分析各类具体问题的开始,将以平面问题3结点三角形单元 为例来阐明弹性力学问题有限元分析的表达格式和一般步 1.1)单元位移模式及插值函数的构造 典型的3节点三角形单元节点编码i,j,m ,以逆时针方向编码为正向。每个节点有位移分量如图所示。 ?? ? ???=i i v u i a (i,j,m) 每个单元有6个节点位移即6个节点自由度,亦即 [ ] T m m j j i i m j i e v u v u v u a a a =??? ? ??????=a 1.2) 单元的位移模式和广义坐标 在有限元方法中单元的位移模式或称位移函数一般采用多项式作为近似函数,因为 多项式运算简便,并且随着项数的增多,可以逼近任何一段光滑的函数曲线。多项式的选取由低次到高次。
有限元极限载荷分析法在压力容器分析设计中的应用2010-07-15 10:39:54| 分类:分析设计| 标签:极限分析分析设计asme规范先进设计方法经验分享|字号大 中 小订阅 在某炼化一体化项目中,几个加氢反应器均采用分析法设计。详细设计时,国内计算后,反应器的主要受压元件厚度均要比专利商建议的厚度多出10~30mm不等。这其中有国内设计出于保守的考虑,另一个原因:同是采用分析设计,ASME的非线性分析相对先进一点。参与国际竞争时,先进的设计方法值得我们研究。 1.背景 随着中国加入WTO,国内各工程公司正积极走向海外。随之进入国际市场的压力容器产品也面临着严峻的挑战,为了在国际舞台上获得竞争优势,各工程公司必须采用先进的技术设计出更安全和更低成本的产品。压力容器分析设计是力学与工程紧密结合产物,解决了常规设计无法解决的问题,代表了近代设计的先进水平[1]。过去,国内分析设计通常采用弹性应力分析法,通过路径分析,应力线性化处理获得路径上的一次应力和二次应力,进而进行强度评定。该方法主要存在以下问题:⑴对大多数情况是安全可靠的,但对某些结果可能出现安全裕度不足的情况(如球壳开打孔);⑵如何对有限元法求解获得的总应力分解并正确分类遇到了困难。假如把一次应力误判为二次,则设计的结果将非常危险,反之,把二次应力误判为一次,则又非常保守。文[2]5.2.1.2节明确提到:应力分类需特殊的知识和识别力,应力分类方法可能产生模棱两可的结果。国内专家亦也认为对应力进行正确的分类存在一定困难[3-6]。 以弹性分析代替塑性分析,是一种工程近似方法。实际结构的破坏往往是一个渐进过程,随着载荷的增加,高应力区首先进入屈服,载荷继续增加时塑性区不断夸大,同时出现应力重新分布。当载荷增大到某一值时,结构变为几何可变机构,此时即使载荷不在增加,变形也会无限增大,发生总体塑性变形(overall plastic deformation),此时的载荷称为“极限载荷(limit load)”。 极限载荷分析法(下文简称极限分析)的目的是求出结构的极限载荷。在防止塑性垮塌失效时,极限分析相比弹性应力分析更接近工程实际,同时避免了应力分类,对防止塑性垮塌有比较精确的评定。 2.极限载荷的求解方法 塑性力学提出极限分析法由来已久。经典的极限分析方法有如下3种[8]:(1)广义内力与广义变形法;(2)上限定理与下限定理法;(3)静力法和机动法。经典解法的分析与计算均很复杂,只能应用于少数结构简单的压力容器元件,从而使极限分析的工程应用受到了限制。 上世纪七十年代出现三维有限元计算后,有限元的应用大大扩展。为了适应工程需要,有限元极限分析应运而生,形成了分析设计中的一个重要分支,它使得复杂的塑性极限分析可以通过计算机数值计算得以解决。在不久的将来,极限分析必与弹性应力分析法、弹-塑性应力分析法一同形成三足鼎立之势。极限分析的模型精度和计算成本居后两者之间。
八年级上册数学【几何模型三角形轴对称】试卷专题练习(解析版) 一、八年级数学全等三角形解答题压轴题(难) 1.(1)问题背景: 如图1,在四边形ABCD中,AB=AD,∠BAD=120°,∠B=∠ADC=90°,E、F分别是BC,CD上的点,且∠EAF=60°,探究图中线段BE,EF,FD之间的数量关系. 小王同学探究此问题的方法是延长FD到点G,使DG=BE,连结AG,先证明 △ABE≌△ADG,再证明△AEF≌△AGF,可得出结论,他的结论应是; (2)探索延伸: 如图2,若在四边形ABCD中,AB=AD,∠B+∠D=180°,E,F分别是BC,CD上的点, 且∠EAF=1 2 ∠BAD,上述结论是否仍然成立,并说明理由; (3)结论应用: 如图3,在某次军事演习中,舰艇甲在指挥中心(O处)北偏西30°的A处,舰艇乙在指挥中心南偏东70°的B处,并且两舰艇到指挥中心的距离相等.接到行动指令后,舰艇甲向正东方向以60海里/小时的速度前进,舰艇乙沿北偏东50°的方向以80海里/小时的速度前进,1.5小时后,指挥中心观测到甲、乙两舰艇分别到达E,F处,且两舰艇与指挥中心O 之间夹角∠EOF=70°,试求此时两舰艇之间的距离. (4)能力提高: 如图4,等腰直角三角形ABC中,∠BAC=90°,AB=AC,点M,N在边BC上,且 ∠MAN=45°.若BM=1,CN=3,试求出MN的长. 【答案】(1)EF=BE+FD;(2)EF=BE+FD仍然成立;(3)210;(4)MN10.【解析】 试题分析:(1)由△AEF≌△AGF,得EF=GF,又由BE=DG,得 EF=GF=DF+DG=DF+BE;(2)延长FD到点G,使DG=BE,连接AG,证明△ABE≌△ADG,再证△AEF≌△AGF,得EF=FG,即可得到答案;(3)连接EF,延长AE,BF相交于点C,根据探索延伸可得EF=AE+FB,即可计算出EF的长度;(4)在△ABC外侧作