学年第学期期末试卷 A 卷首页
课程名称:工业机器人工作站系统集成出卷教师:
任课教师:出卷日期:年月日考试班级:
教学团队审核意见:
签名:日期:年月日系(部)审核意见:
签名:日期:年月日
试题分布情况
答案及评分标准(请与试题分开):
一、填空题(每空1分,共30分)1、搬运、焊接
2、远程
3、100、OFF、ON
4、点位型、连续轨迹型
5、加压、加热
6、上升沿
7、绝对编码器
8、示教、作业原点
9、±0.08mm
10、焊渣、焊丝
11、焊接电压检出线
12、焊接电流、通电时间、电极加压力
13、运动控制、 EtherCAT
14、吸住、释放
15、电源模块、CPU单元、I/O控制单元、CJ系列单元、端盖
二、判断题(每题2分,共20分)
1(×) 2(×) 3(√) 4(√) 5(√)6(√) 7(√) 8(×) 9(√) 10(√)
三、分析题(共30分)
1、(10分)
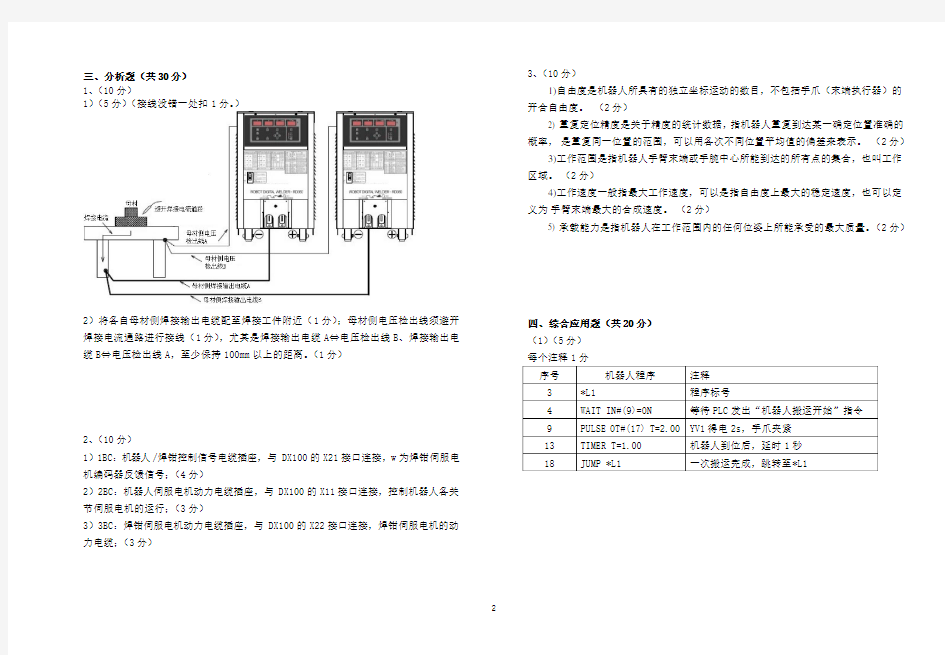
1)(5分)(接线没错一处扣1分。)
2)将各自母材侧焊接输出电缆配至焊接工件附近(1分);母材侧电压检出线须避开焊接电流通路进行接线(1分),尤其是焊接输出电缆A?电压检出线B、焊接输出电缆B?电压检出线A,至少保持100mm以上的距离。(1分)
2、(10分)
1)1BC:机器人/焊钳控制信号电缆插座,与DX100的X21接口连接,w为焊钳伺服电机编码器反馈信号;(4分)
2)2BC:机器人伺服电机动力电缆插座,与DX100的X11接口连接,控制机器人各关节伺服电机的运行;(3分)
3)3BC:焊钳伺服电机动力电缆插座,与DX100的X22接口连接,焊钳伺服电机的动力电缆;(3分)3、(10分)
1)自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。(2分)
2) 重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。(2分)
3)工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。(2分)
4)工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度。(2分)
5) 承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。(2分)
四、综合应用题(共20分)
(1)(5分)
工业机器人工作站系统集成技术 一、说明 1.课程的性质和内容 《工业机器人工作站系统集成技术》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:模块一工业机器人码垛工作站系统集成、模块二工业机器人涂胶装配工作站系统集成、模块三工业机器人装配工作站系统集成。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。 (1)通过本课程的学习,学生应该达到以下几个方面的专业基础。 (2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。 (3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。 (4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。 (5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。 (6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。 (7)熟悉ABB机器人的硬件连接。 3.教学中应该注意的问题 (1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。 (2)在本课程的教学中应该注意培养学生的逻辑思维能力。 (3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。二、学时分配表
三、课程内容及要求 模块一工业机器人码垛工作站系统集成 教学要求 1.了解工业机器人码垛工作站的组成。 2.掌握码垛工作站的机械装配。 3.掌握码垛工作站系统编程。 教学内容 任务1 认识码垛工业机器人工作站 任务2 筛选皮带机构的组装、接线与调试 任务3 立体码垛单元的组装、程序设计与调试 任务4 步进升降机构的组装、接线与调试 任务5 检测排列单元的程序设计与调试 任务6 机器人单元的程序设计与调试 任务7 机器人自动换夹具的程序设计与调试 任务8 机器人轮胎码垛入仓的程序设计与调试 任务9 机器人车窗分拣及码垛程序设计与调试 任务10 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对码垛工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。 模块二工业机器人涂胶装配工作站系统集成 教学要求 1.了解工业机器人涂胶工作站的组成。 2.掌握涂胶工作站的机械装配。 3.掌握涂胶工作站系统编程。 教学内容 任务1 认识涂装工业机器人 任务2 上料涂胶单元的组装、程序设计与调试 任务3 多工位旋转工作台的组装、程序设计与调试 任务4 机器人单元的程序设计与调试 任务5 机器人自动换夹具的程序设计与调试 任务6 汽车车窗框架预涂胶的程序设计与调试 任务7 机器人拾取车窗并涂胶的程序设计与调试 任务8 机器人装配车窗的程序设计与调试
工业机器人:行业未来发展驱动力 【译者按】2019 年7 月,麦肯锡发布《工业机器人:行业未来发展驱动力》。报告描述了工业机器人的特征和产业发展现状,并基于对原始设备制造商和其他企业的采访,分析了驱动全球工业机器人未来发展的动力,指出了释放工业机器人市场全部增长潜能的关键途径。为此,报告认为,政府和产业界应该尽快制定互操作性标准、大力推动与机器人相关的技能提升和再培训、将机器人引入中小型企业,以实现机器人更易应用、更易连接、更易运行的目标。赛迪智库电子信息研究所对该报告进行了编译,期望对我国有关部门有所帮助。 【关键词】全球工业机器人发展动态剖析
一、引言 20 世纪60 年代,出现第一批工业机器人后,原始设备制造商(OEMs)实现焊接车间自动化,工业机器人产业进入第一次高速发展阶段。随着2011-2018 年机器人销量快速增长,工业机器人产业已进入第二次飞速发展阶段。其驱动力主要是行业和经济环境的根本变化,包括技术与新应用快速发展、劳动力成本增加、劳动力流失和短缺日益严重、设备成本日趋下降、全球竞争格局逐渐形成等。 本报告在《2018 年全球机器人调查》基础上,面向机器人的终端用户、生产制造、运营、供应链、工艺工程、服务等人员,论述了全球工业机器人发展空间及市场特点,深刻剖析了驱动当前及预期发展活力的定性因素,并给出了能够释放市场全部增长潜能的关键途径及其对OEMs 和系统集成商的影响。总结出机器人将呈现三方面趋势:更易应用、更易连接、更易运行。 二、工业机器人发展现状 本部分整理并评估了全球工业机器人的市场现状及特点,有利于了解工业机器人行业当前及预期发展的驱动因素及背景,为预测全球工业机器人发展空间提供依据。 (一)细分产品和市场概述
学年第学期期末试卷 B 卷首页 课程名称:工业机器人工作站系统集成出卷教师: 任课教师:出卷日期:年月日考试班级: 教学团队审核意见: 签名:日期:年月日系(部)审核意见: 签名:日期:年月日 试题分布情况 答案及评分标准(请与试题分开):一、填空题(每空1分,共30分) 1、ABB、安川 2、示教模式、再现模式、远程模式 3、伺服电源 4、100、OFF、ON 5、绝对编码器 6、D、5 7、编码器、新电池组 8、远程 9、连续轨迹型、点位型 10、工业机器人本体、机器人控制柜、末端执行器、输送线、外围控制系统 11、暂停、急停 12、法兰 13、外部轴、同步 14、翻转变位 15、焊枪、母材 二、判断题(每题2分,共20分) 1(×) 2(√) 3(×) 4(√) 5(√)6(√) 7(√) 8(√) 9(×) 10(√)
三、分析题(共30分) 1、(10分) a图4分,IN1线1分,IN2线1分,COM线2分;b图6分,IN1线1分,IN2线1分,COM线2分,PC线2分; a)使用变频器内部电源 b)使用变频器外部电源 2、(10分) 3、(10分) 1)当使用外部急停时,跳线一定要拆除。如果不拆除,外部急停信号无效,将导 致机器人无法停止的事故。(3分) 2)采用双回路急停,可以防止外部急停信号当有一个常闭触头由于故障不能断开时, 出现机器人不能急停的事故。二个触头只要有一个断开,就可以保证机器人急停,降 低了不能急停的概率,提高了系统的安全性。(4分) 3)机器人急停后,需要通过操作机器人示教器,在示教模式下,使机器人回到作业 原点,然后再重新控制机器人运行。( 3分) 四、综合应用题(共20分) (1)(5分)
一、机器人系统集成介绍 1.机器人工业化模式 工业机器人系统集成商处于机器人产业链的下游应用端,为终端客户提供 应用解决方案,其负责工业机器人应用二次开发和周边自动化配套设备的集成,是工业机器人自动化应用的重要组成。只有机器人本体是不能完成任何工作的,需要通过系统集成之后才能为终端客户所用。 相较于机器人本体供应商,机器人系统集成供应商还要具有产品设计能力、对终端客户应用需求的工艺理解、相关项目经验等,提供可适应各种不同应用 领域的标准化、个性化成套装备。从产业链的角度看,机器人本体(单元)是 机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。本体产品由于技术壁垒较高,有一定垄断性,议价能力比较强,毛利较高。而系统集成的壁垒相对较低,与上下游议价能力较弱,毛利水平不高,但其市 场规模要远远大于本体市场。 工业机器人产业化过程中,可以归纳为三种不同的发展模式,即日本模式、欧洲模式和美国模式。 日本模式:各司其职,分层面完成交钥匙工程。即机器人制造厂商以开发 新型机器人和批量生产优质产品为主要目标,并由其子公司或社会上的工程公 司来设计制造各行业所需要的机器人成套系统,并完成交钥匙工程; 欧洲模式:一揽子交钥匙工程。即机器人的生产和用户所需要的系统设计 制造,全部由机器人制造厂商自己完成; 美国模式:采购与成套设计相结合。美国国内基本上不生产普通的工业机 器人,企业需要时机器人通常由工程公司进口,再自行设计、制造配套的外围 设备,完成交钥匙工程中国与美国类似,机器人公司集中在机器人系统集成领域。 目前,国内的机器人企业多为系统集成商。根据国际经验来看,国内的机 器人产业发展更接近于美国模式,即以系统集成为主,单元产品外购或贴牌, 为客户提供交钥匙工程。与单元产品的供应商相比,系统集成商还要具有产品 设计能力、项目经验,并在对用户行业深刻理解的基础之上,提供可适应各种 不同应用领域的标准化、个性化成套装备。 中国机器人市场基础低、市场大。中国机器人产业化模式较可行的是从集 成起步至成熟阶段采用分工模式。即美国模式(集成)-日本模式(核心技术)-德国模式(分工合作)。 2.工业机器人集成产业应用方向
全球五大工业机器人生产地区的主角企业盘点 时间:2014-9-20 11:54:01 来源:OFweek 添加人:admin 高技术含量的机器人已经成为工业制造进一步发展的利器,在争夺机器人产业制高点的战役上,各个工业强国可谓不遗余力,国际上已经有一批机器人制造巨头,他们是唱机器人发展这台戏的主角。 一、欧洲知名工业机器人企业基础雄厚 日本和欧洲是全球工业机器人市场的两大主角,并且实现了传感器、控制器、精密减速机等核心零部件完全自主化。欧州工业机器人和医疗机器人领域已居于领先地位。在机器人系统集成方面,除了机器人本体企业的集成业务,知名独立系统集成商还包括杜尔、徕斯和柯马等。2013年德国杜尔和意大利柯玛的系统集成业务收入均约为7亿美元,折人民币100亿元。 欧委会副主席兼数字议程委员尼莉。克洛斯表示:欧洲工业机器人技术居世界领先地位绝非偶然,PETROBOT项目显示了欧盟加强先进技术研发,促进成果转化,开拓新市场,创造新就业的决心。欧洲模式的特点是:一揽子交钥匙工程。即机器人的生产和用户所需要的系统设计制造,全部由机器人制造厂商自己完成,以下为大家盘点下目前欧洲地区最有影响力的工业机器人企业。 1、瑞典ABB ABB致力于研发、生产机器人已有30多年的历史并且拥有全球160000多套机器人的安装经验。作为工业机器人的先行者以及世界领先的机器人制造厂商,在瑞典、挪威和中国等地设有机器人研发、制造和销售基地。ABB于1974年发明了世界上第一台工业机器人,并拥有当今最多种类、最全面的机器人产品、技术和服务,及最大的机器人装机量。ABB的领先不光体现在其所占有的市场份额和规模,还包括其在行业中敏锐的前瞻眼光。 ABB不但服务于包括诸如戴姆勒。克莱斯勒、法国标致和本田等知名跨国公司,而且我们与越来越多优秀的中国企业,例如吉利、长城汽车、比亚迪、上海通用、上海大众、富士康、娃哈哈、蒙牛等建立起密切的合作伙伴关系。ABB致力于提供解决方案,帮助客户提高生产效率、改善产品质量、提升安全水平。在工业机器人行业,ABB可谓是当之无愧的领先者。 2、瑞士Staubli 史陶比尔集团是纺织机械、工业连接器和工业机器人三大领域机电一体化专业供应商。它的机械运动和技能和技术投入到机器人当中。1982年,机器人事业的发展体现在技能的提升和新方案的开发。机器人凭借技术及商业领域的安全、可靠和高效,成为全球领域的工业机器人领先者之一。 史陶比尔将其在机械运动控制方面的经验和优势应用在工业机器人上,开发出整个系列的工业机器人,包括RS系列(收购博世)、TS系列、RX系列和TX 系列。史陶比尔工业机器人具有更快的速度,更高的精度,更好的灵活性和更友好的用户环境的特点。 早在1982年,史陶比尔已经成立了工业机器人部门,经销美国UNIMATION公司的PUMA机器人,1988年,史陶比尔成功收购了UNIMATION.而UNIMATION是世界上最著名的机器人专家恩格尔伯格所创立的企业,PUMA正是世界上第一台工业机器人。史陶比尔如今已是全球范围的工业机器人领先者之一。 史陶比尔自己的工厂就是高度自动化的典范。在这个产值连年快速增长的工厂内,工人还不到100人。厂房内一条条自动装配线,高速地运转。除了少数几个设备管理人员,几乎看不到流水线上的工人。 3、德国的KUKA 库卡机器人有限公司于1995年建立于德国巴伐利亚州的奥格斯堡,是世界领先的工业机器人制造商之一。库卡机器人公司在全球拥有20多个子公司,大部分是销售和服务中心,其中包括:美国,墨西哥,巴西,日本,韩国,台湾,印度和绝大多数欧洲国家。公司的名字,KUKA(库卡),是KellerundKnappichAugsburg 的四个首字母组合,它同时是库卡公司所有产品的注册商标。 1973年公司研发了其名为FAMULUS第一台工业机器人。当时库卡公司属Quandt集团旗下,而Quandt家族则于1980年退出。公司成为一个上市公司。1995年库卡机器人技术脱离库卡焊接及机器人有限公司独立成立有限公司,与库卡焊接设备有限公司(即后来的库卡系统有限公司),同属属于库卡股分公司(前身IWKA集团)。现今库卡专注于向工业生产过程提供先进的自动化解决方案。 4、德国CLOOS CLOOS位于海格尔的Carl-cloos焊接技术有限公司在焊接和切割技术上有着80多年的历史和成功经验。该家族公司成立于1919年,是一个在焊接和机器人技术电弧跟踪领域的世界领先者。该家族公司有500名员工,专注于制造业,CLOOS产品包括气体保护焊机、焊枪以及用于特定用途的自动机械和成套的ROMAT 机器人系统。 自1978年以来,卡尔?克鲁斯焊接技术有限公司一直在焊接制造工艺的机械自动化方面保持着自己的成功。克鲁斯主要专注于熔化极惰性气体/活性气体保护焊和钨极惰性气体保护焊机以及成套ROMAT?机器人系统的生产,是一家整套焊接系统的单一货源供应商。对于客户而言,其受益之处在于所有的机械手系统部件,从机械手控制、工件、定位器、传感器到电源和焊枪,都是由一家供应商开发和制造的。 对于客户而言,其受益之处在于所有的机械手系统部件,从机械手控制、工件、定位器、传感器到电源和焊枪,都是由一家供应商开发和制造的。而诸如熔化极惰性气体/活性气体保护双丝焊接技术、等离子(焊剂)和扁丝焊接等新的有效工艺技术使机械手的使用更加经济实惠。 5、德国百格拉
多年质保操作简单方便快捷—————————————————————————————————————————————对于我们大多数人来说,社会发展速度这么快,生活中的一切都越来越智能化,机器人并不是什么难见的,作为一种新颖的能助力设备够比较节省人力,那么其上下料工作站你了解吗?接下来由安徽泰珂森智能装备科技有限公司为您简单介绍,希望能给您带来一定程度上的帮助。 工业机器人上下料作站由上下料机器人、数控机床、PLC控制柜、输送线、等组成。 1)上下料工业机器人 上下料工业机器人包含:工业机器人、控制柜、示教器、末端执行器。上下料工业机器人的选型一般根据自动生产线加工产品与设备布局来选用工业机器人及末端执行器。 2) 数控机床
多年质保操作简单方便快捷—————————————————————————————————————————————数控机床的任务是对工件进行加工,而工件的上下料则由工业机器人完成。 3) PLC控制系统 PLC控制柜用来安装断路器、PLC、开关电源、中间继电器、变压器等元件器。 4) 上下料输送线 上下料输送线的功能是将载有待加工工件的托盘输送到上料工位,机器人将工件搬运至机床进行加工,再将加工完成的工件搬运到托盘上,由输送线将加工完成的工件输送到装配工作站进行装配。 工业机器人上下料工作流程如下: (1) 当载有待加工工件的托盘输送到上料位置后,机器人将工件
多年质保操作简单方便快捷—————————————————————————————————————————————搬运到数控机床的加工台上; (2) 数控机床进行加工; (3) 加工完成,机器人将工件搬运到输送线上料位置的托盘上; (4) 上料输送线将载有已加工工件的托盘向装配工作站输送。 安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。 公司在机械加工及自动上下料、自动打磨抛光,包装物流及搬运,汽车零部件加工组装,无人化工厂解决方案等众多行业中拥有成熟的应用案例。致力于以工业机器人应用为核心,为客户提供完善的自动化解决方案和交钥匙工程,同时是德国库卡、日本发那科、日本川崎、国产埃夫特机器人授权代理商与系统集成商,在机器人技术应用上有着密切的合作,为用户提供强有力的技术支撑。
十大优秀工业机器人系统集成商 分析 十大优秀工业机器人系统集成商分析 工业机器人产业是一个集系统集成、先进制造和精密配套融合一体的产业,是一个需要技术、制造、研发沉淀经验的行业。从我国机器产业链发展来看,由于受核心技术限制等多方面因素影响,我国工业机器人产业目前获得突破的主要为系统集成领域。国内一些领先企业从集成应用开始,主要借助对国内市场需求、服务等优势,逐渐脱颖而出,取得了不错的市场成绩。笔者对获得2013年十大优秀工业机器人系统集成商的发展概况及主要产品进行了简单归纳分析,以飨读者。 1、佛山市利迅达机器人系统有限公司(简称:利迅达) 佛山市利迅达机器人系统有限公司是从事机器人系统自动化集成和工业智能化设备研发、生产的高科技企业。公司筹备于2008年,于2010年4月正式成立,经过数年迅猛增长,已发展成为华南地区乃至国内规模最大,实力最强的专业工业机器人应用系统集成商。
利迅达与欧州多家高技术企业的机器人系统研发生产企业战略合作,令利迅达由一开始就在一个国际级的高起点上,再根据中国市场实际,研发出一系列具自有知识产权的全新意念的金属产品表面处理综合系统。其中“机器人打磨拉丝 系统”被评为2011年广东省高新技术产品;“机器人智能化焊接系统”被评为2012年广东省高新技术产品。公司为顺德区百家智能制造工程试点示范企业,在2013年被认定为国家级高新技术企业。 2、厦门思尔特机器人系统有限公司(简称:思尔特) 思尔特创建于2004年6月,位于厦门集美灌南工业区,是厦门市高新技术企业。思尔特多年来为中联、徐工、柳工、厦工、龙工、玉柴等多家国内大中型企业服务,设计制造出技术先进的机器人系统。 2009年,思尔特在上海成立全资子公司上海思尔特机器人科技有限公司,针对冲压机、折弯机、压铸机、弯管机、热锻机等机床的自动上下料生产线的研发、设计、制造。 2010年,思尔特决定打造西南区制造基地,于2010年7月注册成立全资子公司成都思尔特机器人科技有限公司。成都思尔特是西南地区首家专业机器人系统集成商,具有年集成200套机器人系统的能力,主营方向为汽车零部件及薄板焊接的机器人应用。 3、无锡丹佛数控装备机械科技有限公司(简称:丹佛) 无锡丹佛数控装备机械科技有限公司成立于2010年,现阶段主要经营项目分别为:abb工业机器人、韩国现代工业机器人、焊接机器人、搬运机器人、涂装机器人、机床上下料机器人、码垛机器人、焊接机器人、机器人取毛刺等等,同时为客户提供夹具设计制造及交钥匙工程。 丹佛又与几家大型的融资企业签订战略合作合伙,为那些有订单有市场而没有太多
焊接工业机器人论文报告 机械卓越1102 游华栋 (1.江阴宇博科技,江苏省江阴市邮编214400;) 摘要:工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。是要在多学科知识的综合应用方面,强化机器人技术应用能力的培养,以满足机械类应用型高级人才的培养。结合有关文献对焊接机器人的机械结构、电机驱动、运动学计算、控制技术、传感器、轨迹规划与编程操作等应用进行系统解构。机器人技术代表了机电一体化技术的最够研究成果,涉及机械工程、电子技术、计算机技术、自动控制理论、自动控制技术及人工智能等多门学科,当代科学技术发展最活跃的领域之一。 关键词:焊接机器人;结构设计;控制方式;感觉系统; Welding industrial robot reports HUADONG YOU (YUBO Technology Co., Ltd. ,Jiangyin, ,JiangYin province, 214400, china) Abstract:The industrial robot is a multi joint manipulator for industrial areas or more degrees of freedom robot. Industrial robot is automatically performing work machine equipment, a machine that is controlled by its own power and ability to achieve the various functions. It can accept human command, and can also be run in accordance with the procedures of pre-arranged, modern industrial robots can also make according to the principles of the programme of action of the artificial intelligence technology. Is to be in the integrated application of multi subject knowledge, strengthen the training of application ability of robot technology, in order to meet the training applied talents of machinery. Based on relevant documents of a welding robot mechanical structure, the motor drive, kinematics, control technology,sensor, trajectory planning and programming operation application system deconstruction. Robot technology represents the mechatronics technology enough research results related to mechanical engineering, electronic technology, computer technology, automatic control theory, automatic control of multi discipline technology and artificial intelligence, one of the most active fields of contemporary science and technology development. 正文: 我国开发工业机器人晚于美国和日本,起于20世纪70年代,早期是大学和科研院所的自发性的研究。到80年代中期,全国没有一台工业机器人问世。而在国外,工业机器人已经是个非常成熟的工业产品,在汽车行业得到了广泛的应用。在国家的组织和支持下,我国焊接机器人的研究在基础技术、控制技术、关键元器件等方面取得了重大进展,并已进入使用化阶段,形成了点焊、弧焊机器人系列产品,能够实现小批量生产。本文以中等篇幅来介绍我国焊机机器人的发展、及其简单结构、操纵原理等等。 经过近10年的努力,我国在机器人焊装夹具设计方面积累了较丰富的经验,机器人周边设备实现了标准化,具有年产300余套焊接机器人工作站的能力。可以说国内的系统集成商在机器人工作站及简单的焊装线的设计开发方面具有了与国外系统集成商抗衡的能力,近几年为国内汽车零部件等企业提供了大量的机器人焊接系统。 虽然机器人问世已经几十年,但目前关于机器人仍然没有统一、严格、准确的定义。其原因就是机器人还在发展,新的机型不断涌现,机器人可实现的功能不断增多。目前大多数国家倾向于美国机
工业机器人系统集成市场现状与特点 目前大多数国内机器人厂商业务集中于此,竞争激烈从产业链的角度看,机器人本体(单元)是机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。只有机器人裸机是不能完成任何工作的,需要通过系统集成之后才能为终端客户所用。系统集成方案解决商处于机器人产业链的下游应用端,为终端客户提供应用解决方案,其负责工业机器人软件系统开发和集成,是工业机器人自动作业的重要构成。在我国,系统集成商多是从国外购臵机器人整机,根据不同行业或客户的需求,制定符合生产需求的解决方案。 系统集成想从小做大规模并不容易。系统集成企业的工作模式是非标准化的,从销售人员拿订单到项目工程师根据订单要求进行方案设计,再到安装调试人员到客户现场进行安装调试,最后交给客户使用,不同行业的项目都会有其特殊性,很难完全复制。如果专注于某个领域,可以获得较高的行业壁垒,但这个壁垒也使系统集成企业很难跨行业去扩张,其规模也很难上去。 尽管存在诸多障碍,近年来国内还是涌现一批系统集成行业的佼佼者。国际机器人系统集成企业主要有kuka、abb、发那科、科马、锐驰机器人、徕斯等。国内涉足下游集成应用领域的上市公司包括新松机器人、博实股份、天奇股份、广州数控、埃斯顿等,其中新松机器人为国内最大的系统集成商,主要从事工业机器人及自动化成套装备系统的研发、制造。新三板公司有伯朗特、林克曼、拓斯达等。 机器集成产业现状 机器人系统集成商作为中国机器人市场上的主力军,普遍规模较小,年产值不高,面临强大的竞争压力。根据GGII的数据显示,截至2014年9月,中国机器人相关企业428家,其中系统集成商就占88%,并且从相关市场数据来看,现阶段国内集成商规模都不大,销售收入1个亿以下的企业占大部分,能做到5个亿的就是行业的佼佼者,10个亿以上的全国范围屈指可数。 一般工业是指非汽车行业。目前汽车行业的自动化程度比较高,供应商体系相对稳定。而一般工业的自动化改造需求相对旺盛。全球工业机器人集成从应用角度看“搬运”占比最高。全球工业机器人销量中,半数机器人用于搬运应用。搬运应用中又可以按照应用场景不同分为拾取装箱、注塑取件、机床上下料等。按照应用来分,占比前三的应用为搬运50%,焊接28%,组装9%。现阶段工业机器人系统集成有如下特点: 1)不能批量复制 系统集成项目是非标准化的,每个项目都不一样,不能100%复制,因此比较难上规模。能上规模的一般都是可以复制的,比如研发一个产品,定型之后就
2020年机器视觉公司排名 机器视觉系统最基本的特点就是提高生产的灵活性和自动化程度。在一些不适于人工作业的危险工作环境或者人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉。同时,在大批量重复性工业生产过程中,用机器视觉检测方法可以大大提高生产的效率和自动化程度。 近年来,随着我国智慧城市建设的重新火热,机器视觉技术的市场需求量大增。对于人脸识别、图片搜索引擎、医疗诊断、智能驾驶、娱乐营销等智慧城市建设的多个领域来说,机器视觉技术都是不可或缺的。 随着制造业企业对自动化、智能化需求的不断提升,一大批机器视觉企业涌现了出来。那么,让我们一起来看看都有哪些企业已经涉足这一领域,以及他们的发展情况如何。 机器视觉国外供应商 基恩士 从光电传感器和近接传感器到用于检测的测量仪器和研究院专用的高精度设备,KEYENCE的产品覆盖面极其广泛。KEYENCE的客户遍及各行各业,有超过80,000的客户都在使用KEYENCE的这些产品。用户只要针对特定应用选择合适的KEYENCE产品,就可以安装高产量,高效能的自动化生产线。 基恩士产品的设计理念是给予客户的制造与研发创造附加价值。产品按照通用目的进行工程设计,因此它们可以用在各个行业或广泛的应用场合。基恩士为既存和潜在的应用需要提供更具附加价值的产品。 基恩士为世界范围内约100个国家或地区的20余万家客户提供服务,基恩士这个名称意味着创新与卓越。 xx 创立于1933年的欧姆龙集团是全球知名的自动化控制及电子设备制造厂商,掌握着世界领先的传感与控制核心技术。通过不断创造新的社会需求,欧姆龙集团已在全球拥有近36,000名员工,营业额达7,942亿日元。产品涉及
一、填空题 1、工业机器人通常由执行机构、驱动系统、控制系统、传感系统四部分组成。 2、工业机器人手部工作原理不同,结构形式不同按其夹持原理不同,可以分为机械式、磁力式和真空式三种。 3、电气设备包含用于轴1至轴6电机的所有电机电缆和控制电缆。 4、工业机器人外围设施的电气连接包括防护门的电气连接、静电保护的连接。 5、工业机器人工作站集成一般包括硬件集成、和软件集成两个过程。硬件集成需要根据需要对各个设备接口进行统一定义,以满足通信要求;软件集成则需要对整个系统的信息流进行综合,然后再控制各个设备按流程运转。 6、工业机器人工作站设计过程包括可行性分析、工作站和生产线的详细设计、制造与运行、交付使用四部完成。 7、工业机器人弧焊工作站主要由机器人系统、焊枪、焊接电源、送丝机构、焊接变位机等组成。 8、焊枪导电嘴为机器人移动TCP点,机器人的运动主要由各轴单独运动、TCP点直线运动、机器人姿态运动3种运动方式。 9、安川MA1400机器人包括机器人本体、DX100控制柜、示教器组成。 10、DX100控制柜主要由控制柜冷却、电源接通单元、基本轴控制基板、CPU单元、CPS单元、断路器基板、I/O单元、机械安全单元、机器人专用输入端子台、伺服单元组成。 11、电源接通单元是由电源接通顺序基板和伺服电源接触器以及线路滤波器组成。 12、电源接通单元根据来自电源接通顺序基板的伺服电源控制信号的状态,打开或关闭伺服电源接触器,供给伺服单元电源,电源接通单元经过线路滤波器对控制电源供给电源。 13、CPU单元是由控制器电源基板与基本架、控制基板、机器人I/F单元和轴控制基板组成。 14、伺服单元主要由变频器及PWM放大器构成。 15、弧焊工作站中需要根据材质或焊缝的特性来调整焊接电压或电流的大小及是否需要摆动,用程序数据来控制这些变化的因素通过设定焊接参数、起弧收弧参数、摆弧参数来实现。 16、盛放二氧化碳气体的气瓶一般分为飞虹吸式、虹吸式两种。 17、弧焊专用基板是DX100控制柜与焊接电源连接交换信息,弧焊基板具有2路模拟输出、2路模拟输入、以及焊接电源的输入输出状态信号。 18、机器人与焊接电源的接口信号一般需要包括对焊接电源状态的控制、对焊接参数的控制、焊接电源给机器人的反馈信号三种功能。 19、DX100控制柜电源连接漏电断路器,要使用可防止高频的漏电断路器,它能防止整流器的高频漏电流引起的误动作。 20、专用输入输出信号的功能是机器人系统预先定义好的,当外部操作设备作为系统来控制机器人及相关设备时,要使用专用输入输出。 21、通用输入输出主要是在机器人的操作程序中使用,作为机器人和周边设备的即时信号。 22、工业机器人点焊工作站由机器人系统、伺服机器人焊钳、冷却水系统、电阻焊接控制器装置、焊接工作台等组成。 23、电极材料具有足够高的导电率、热导率和高温硬度的制造要求。 24、点焊电极的结构可分为标准直电极、弯电极、帽式电极、螺纹电极、和复合电极五种。 25、点焊机器人控制系统由本体控制部分及焊接控制部分组成。本体控制部分主要实现示教在线、焊点位置及精度控制,控制分段的时间及程序转换,还通过改变主电路晶闸管的导通角而实现焊接电流控制。 26、目前使用的机器人点焊电源主要由单相工频交流点焊电源和逆变二次整流式点焊电源两种。
最新工业机器人工作站系统集成技术教学大纲 工业机器人工作站系统集成技术 一、说明 1.课程的性质和内容 《工业机器人工作站系统集成技术》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:模块一工业机器人码垛工作站系统集成、模块二工业机器人涂胶装配工作站系统集成、模块三工业机器人装配工作站系统集成。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。 (1)通过本课程的学习,学生应该达到以下几个方面的专业基础。 (2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。 (3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。 (4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。 (5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。 (6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。 (7)熟悉ABB机器人的硬件连接。 3.教学中应该注意的问题 (1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。 (2)在本课程的教学中应该注意培养学生的逻辑思维能力。 (3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。 二、学时分配表
三、课程内容及要求
教学要求 1.了解工业机器人码垛工作站的组成。 2.掌握码垛工作站的机械装配。 3.掌握码垛工作站系统编程。 教学内容 任务1 认识码垛工业机器人工作站 任务2 筛选皮带机构的组装、接线与调试 任务3 立体码垛单元的组装、程序设计与调试 任务4 步进升降机构的组装、接线与调试 任务5 检测排列单元的程序设计与调试 任务6 机器人单元的程序设计与调试 任务7 机器人自动换夹具的程序设计与调试 任务8 机器人轮胎码垛入仓的程序设计与调试 任务9 机器人车窗分拣及码垛程序设计与调试 任务10 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对码垛工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。 模块二工业机器人涂胶装配工作站系统集成 教学要求 1.了解工业机器人涂胶工作站的组成。 2.掌握涂胶工作站的机械装配。 3.掌握涂胶工作站系统编程。 教学内容 任务1 认识涂装工业机器人 任务2 上料涂胶单元的组装、程序设计与调试 任务3 多工位旋转工作台的组装、程序设计与调试 任务4 机器人单元的程序设计与调试 任务5 机器人自动换夹具的程序设计与调试 任务6 汽车车窗框架预涂胶的程序设计与调试 任务7 机器人拾取车窗并涂胶的程序设计与调试 任务8 机器人装配车窗的程序设计与调试 任务9 工作站整机程序设计与调试 教学建议 本项目的主要教学目标是使学生对涂胶工作的有系统认识和形成编程逻辑。讲授是,注意结合简单的实例阐述本课程的作用,对于理论的知识可以先作简单的介绍,在后面的教学中再进一步深化。
一、选择题(每题2分,共10分) 1.具有一个旋转轴和两个平移轴的机器人为 B 机器人。 A 直角坐标型 B 圆柱坐标型 C 球坐标型 D 关节型 2.气流负压吸盘采用 B ,能保证吸盘内持续产生负压。 A 挤压排气 B 气流负压 C 真空抽气 D 电磁吸力 3.工业机器人工作站是以 B 作为加工主体的作业系统。 A 周边设备 B 工业机器人 C 末端执行器 D 控制系统 4.真空式手爪属于 B 。 A 机械式夹手爪 B 气吸式手爪 C 多指手爪 D 磁吸式手爪 5.工业机器人弧焊工作站的周边设备有 B 。 A 机器人 B 变位机 C 焊钳 D 机器人控制柜 二、填空题(每空1分,共55分) 1.伺服监控寄存器IB80000=1表示运动控制器操作准备就绪。 2.“Servo Parameter”的Pn.50B Digits:0]用于设定反转限位信号的类型。 3.伺服固定参数是由所使用电机和其它设备的固有值决定的。 4.关节坐标型机器人由大小两臂和立柱组成。 5.系统“自动配置”时,超行程设置为 Disabled(无效)。 6.机器人的自由度要根据其用途选择,一般在 3~6 个之间。 7.连续轨迹控制是指机器人按照规定的路径平稳和准确的运动。 8.如果DX100控制柜不位于工作场地内,可通过外部设备远程接通和切断控制电源。 9.机器人的定位精度由机械误差、控制算法与系统分辨率等组成。 10.伺服固定参数“功能选择标志1 (funct ion selection flag)”的bit3用于正向超程设置。 11.直角坐标型机器人由三个相互正交的平移坐标轴组成,各个坐标轴运动独立,其工作空间图形为长方形。 12.可以进行自动化搬运作业的工业机器人称为搬运机器人。 13.根据吸盘内腔负压产生的方法,真空式吸盘可分为真空吸盘、气流负压吸盘和挤气负压吸盘等三种基本类型。 14.DX100控制柜的I/O单元的型号为JZNC-YIU01-E 。 15.关节坐标型机器人大小臂之间用铰链连接形成肘关节,大臂和立柱连接形成肩关节,可实现三个方向的旋转运动。 16.工业机器人的技术参数反映了机器人的适用范围和工作性能,是选择和使用机器人时必须考虑的关键问题。 17.扩散反射型光电传感又称为漫射型光电传感。 18.MP2310的Ethernet通信IP地址默认为 192.168.1.1 。 19.光电传感器的输出形式为集电极开路输出,有 NPN 型和 PNP 型。 20.应根据机器人的应用场合,如易燃、易爆、高温、腐蚀的环境中,选择机器人所需要的防护等级。 21.圆柱坐标型机器人由支柱和水平臂组成。 22.电动式机器人是由电动机驱动执行机构运动的。 23.机器人外部控制主要包括:外部急停、外部暂停、外部伺服ON 、 外部运行等。 24.光电传感器的输出电路形式有二线制、三线制、四线制。 25.MP2310的Ethernet通信IP地址在 218IFA 中设置。 26.工业机器人按驱动方式分为液压式、气动式和电动式机器人。 27.“可选SVB”模块SVB-01安装于 MP2310的可选插槽中。 28.如果使用PLC发送高频脉冲给伺服驱动器,控制伺服电机运行,PLC的输出类型必须选择晶体管类型。 29.工业机器人按执行机构的运动控制方式分为点位控制和连续轨迹控制。
机器人行业深度研究报告 【核心观点】 ●当前全球机器人市场主要以工业机器人为主,占市场份额的80%。未来服务机器人的行业规模或将超过工业机器人,成为新蓝海。 ●预计2014~2017年全球服务机器人市场规模累计将达2000亿元,复合增速将达到22%,中国市场增速远高于全球增速。以清洁机器人为例,“双十一”期间,国内扫地机器人公司科沃斯实现全网销售3.15亿元,其中在天猫商城销售达2.76亿元。这让我们看到了服务机器人在终端消费需求的爆发力。 ●中国的机器人密度仅为30,远低于世界平均水平的62,而世界最高的韩国达到437。工信部工业装备司副司长王卫明曾透露,国家的相关产业规划到2020年中国工业机器人的产业体系要具备3至5家具有国际竞争力的企业,8至10个产业配套集群,机器人密度达到100以上。从30到100对应的是3倍以上市场规模的增长。 ●机器人将迎来政策密集落地期,制造强国战略对机器人产业是长期利好。 ●机器人板块选股思路包括关键零部件国产化——$上海机电(SH600835)$$双环传动(SZ002472)$;工业机器人本体放量,尤其是经济型本体——$巨星科技(SZ002444)$;有技术含量的系统集成商——$机器人(SZ300024)$$埃斯顿(SZ002747)$;新兴的服务机器人——$博实股份(SZ002698)$$慈星股份(SZ300307)$。 【导读】 机器人的诞生或许并不是20世纪产业界最伟大的成就,但却可能是21世纪最伟大的变革! 机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。自从1962年美国研制出世界上第一台机器人以来,机器人技术及其产品发展很快,已成为柔性制造系统(FMS)、自动化工厂(FA)、计算机集成制造系统(CIMS)的自动化工具。 广泛采用机器人,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。和计算机、网络技术一样,工业机器人的广泛应用正在日益改变着人类的生产和生活方式。 机器人能干的工作也已经从搬运、码垛、焊接等生产活动,到读报、陪护、弱交流等生活活动,再到排雷、战斗等军事活动,渗透到了人类的方方面面。随着需求范围的扩大,机器人结构和形态的发展呈现多样化。高端机器人具有明显的仿生和智能特征,其性能不断提高,功能不断扩展和完善,各种机器人系统逐步向具有更高智能方向演进。 目前机器人主要分为:工业机器人和服务机器人两大类。工业机器人细分为焊接机器人、搬
深圳市远荣机器人自动化设备有限公司 主要从事机器人系统、自动喷涂设备和自动化柔性生产线的研发、设计、制造承揽星辉互动娱乐集团,车模机器人涂装,婴儿童车机器人涂装工程、销售及服务,产业遍及汽车零部件,通讯,家电、电子、3C、五金、卫浴、塑胶、皮具、灯饰、木业、玩具、食品等制造产业,根据客户的要求非标定做自动化设备,解决客户人工成本高、招工难等实际问题,从而帮助客户提高市场核心竞争力。 远荣机器人先后成为ABB和日本TAKUBA战略合作伙伴,并成为ABB机器人十佳合作伙伴,2010年获得上海ABB颁发的卓越成长奖,2011年获得上海ABB颁发的杰出贡献奖,2012年获得上海ABB颁发的最佳表现奖。 行业内独家建设了1200平方米的产品展厅,内有喷涂机器人实验室和工业机器人实验室,免费为客户提供技术咨询和各类产品机器人系统服务。并建立有专门的研发实验室,锐意创新,始终走在市场的前列。近年来,远荣在研发方面投入了大量的人力、物力、财力,在众多行业首创机器人应用.官网地址:https://www.doczj.com/doc/c81836455.html, 川一机器人是一家集研发、制造、销售、服务于一体,专注于注塑行业工业机械手自动化设备集成供应的高科技企业。 公司位于广东省佛山市。秉承“品质?博远”的经营理念,以质量求生存、以创新求发展,以领先的技术和完善的服务赢得市场的赞誉,以注塑车间无人自动化生产为使命博远于未来。具有15年注塑行业经验、8年注塑行业工业机械手生产制造与研发成果,5年经销网络与渠道管理经验。并联合多所高校及通过装备行业协会进行技术交流与合作,不断夯实我们的技术基础与实力;并取得了众多产品专利证书。 拥有一支高素质的研发队伍,包括机械手设计、软件开发、电路设计、气动设计等,运用先进电脑设计系统,CAD、3D立体设计模演和分析真实工况,不断改善和推出新机型以满足市场和客户的需求。川一机器人对每一制造环节都严格控制和检验以保证产品的质量和使用寿命,配备先进的检验设备,力争使产品100%的品质出厂。 川一机器人自动化系列产品不断融合国内外先进的设计和制造理念,针对客户的不同需求寻求合理的自动化解决方案服务于广大客户,在激烈的市场竞争中不断完善并拥有川一自主知识产权的工业机械手系列产品。产品广泛应用于食品包装、化妆品包装、日用塑胶制品、大小家电制品、消费类电子产品、汽车配件、蓄电池塑胶产品、建材塑胶产品、医疗及体育用品等广大塑胶制品行业的自动化生产。官网地址:https://www.doczj.com/doc/c81836455.html,/ 佛山市利迅达机器人系统有限公司面对21世纪先进制造技术的蓬勃发展,从信息化、集成化、系统化、柔性化等方面机器人技术的发展与应用提出了新的机遇和挑战,利迅达机器人与欧州多家高技术企业的机器人系统研发生产企业战略合作,令公司由一开始就在一个国际