拖拉机液压悬挂机构自动控制系统
王会明侯加林赵耀华李东民
【摘要】在原拖拉机半分置式液压悬挂机构中改进设计了自动控制系统。分别阐述了自动控制系统的组成、工作原理、土壤阻力传感器、农具提升高度传感器、主控制阀位移传感器信号的测取与处理以及单片机控制的实现。控制系统试验表明,拖拉机液压悬挂系统的自动控制是有效的。
关键词: 液压悬挂机构换向阀传感器油缸自动控制中图分类号:S219;O32.4
文献标识码:A
StudyonAutomaticControlSystemforHydraulic
HitchEquipmentofTractor
WangHuiming1
HouJialin1
ZhaoYaohua2
LiDongmin
1
(1.ShandongAgriculturalUniversity 2.ShandongTractorManufactory)
Abstract
Asimplestructureofsemi-partitionhydraulichitchequipmentandconstitutingofautomatic controlsystemwasprovided.Thesignalofsoilresistancesensorandtheimplementliftheightsensorandt hecontrol-valvesensorweremeasuredandmanaged.Thesystemwasunderthecon-troloftheSCM.Fina lly,theanalyticresultswereprovided,whichshowedthattherelationshipbetweentractionandthecultiv atingdeepnesswasthelinear,andthehydraulichitchsystemoftractorwasautomaticcontrolled.Theresu ltsofexperimentshowedthatthedesigningplanisre-liable,theautomationofthesystembasicallyrealiz ed,operationcouldbemadeeasily,produc-tioncosthasbeenreducedanditissimpleandconvenienttoin stall.
Keywords Hydraulichitchequipment,Changevalve,Sensor,Cylinder,Automaticcontrol
收稿日期:2005
0729
王会明山东农业大学机械与电子工程学院教授,271018 泰安市侯加林山东农业大学机械与电子工程学院教授
赵耀华山东拖拉机厂工程师,272000 泰安市李东民山东农业大学机械与电子工程学院硕士生
引言
现有的多数农用拖拉机的液压悬挂系统,其农具的提升和下降的控制部分是机械式的,由驾驶员通过操纵手柄和一套杆件机构以位移量的形式输入信号,输出量则是通过弹簧、凸轮和力、位调节杠杆
机构转换成的位移量,从而实现操纵主控制阀对农具位置的调整。机械控制的液压悬挂系统采用杆件和弹性元件,结构比较复杂,弹性元件的迟滞、机械
摩擦和杆件的胀缩会影响调节性能。进入21世纪后,拖拉机向大功率、低油耗、轻排放、智能化、密封和舒适性方向发展,机械式的控制系统在结构布置和性能方面已不适应现代农机发展的要求。
将农业机械装备技术融合现代液压技术、传感器技术、微电子技术和单片机控制技术,可极大地提高液压悬挂系统操作的舒适性和简捷性,准确、快速地使用和调节液压悬挂系统,可提
高生产率和作业质量。因此,对传统式液压悬挂系统的技术改进势在
必行。
1 液压悬挂系统的组成与工作
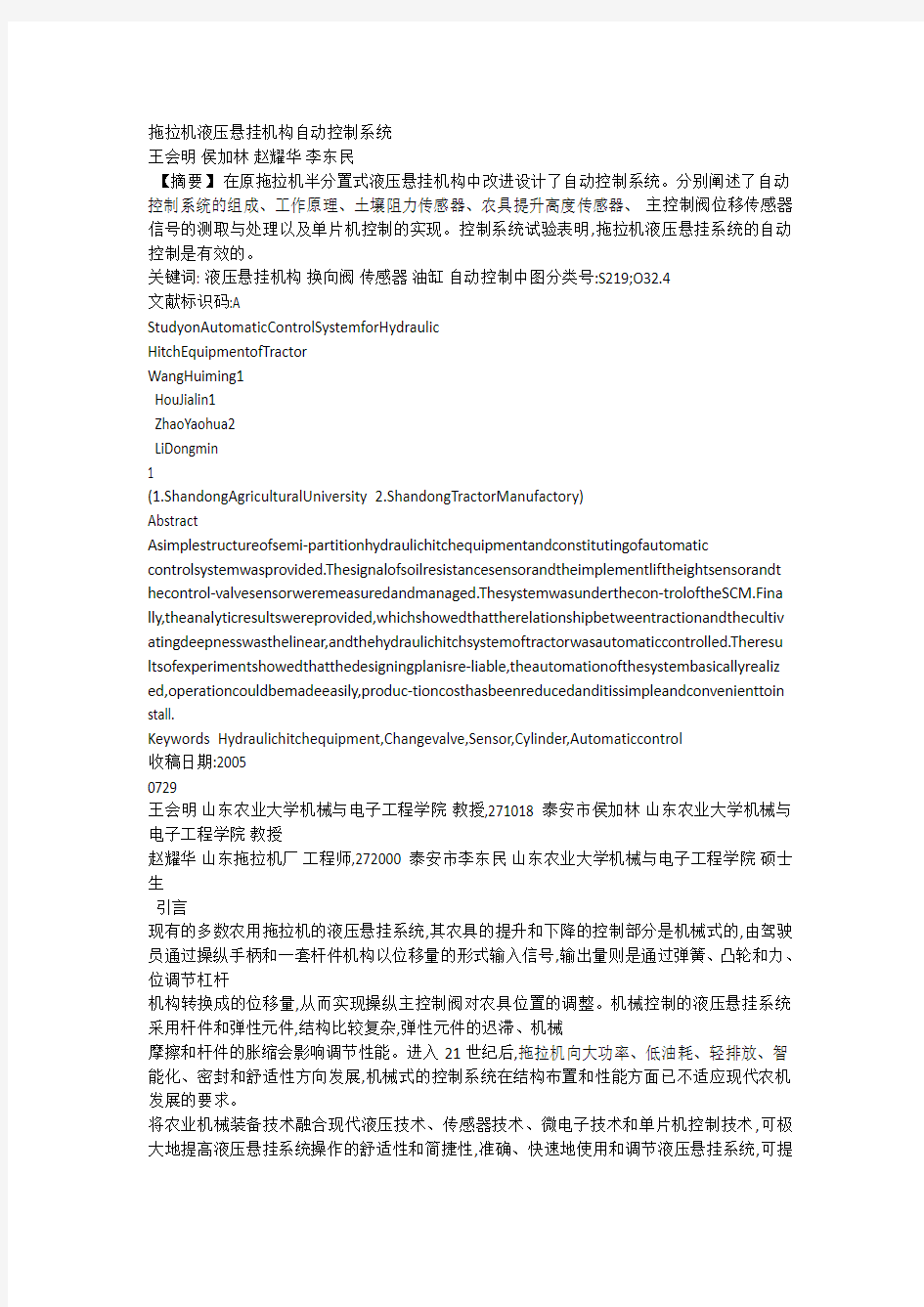
改进后的液压悬挂系统的组成如图1所示。它由液压悬挂系统、自动控制系统和信号检测与处理系统组成。
图1 电控液压系统原理图
Fig.1 Sketchofelectriccontrolhydraulicsystem
1.液压缸
2.下降速度调节阀
3.分配器
4.油泵
5.主控制阀
6.回油阀
7.安全阀
8.单向阀
9.小油缸 10.电磁换向阀 11.中央处理器 12.油缸 13.活塞杆 14.光电耦合器15.背压阀 16.减压阀 17.滤油器 18.位移传感器 19.角位移传感器 20.力传感器 21.控制面板
液压悬挂系统:由原液压悬挂系统的油泵、分配器、液压油缸、提升臂、拉杆和弹簧等组成。主要完成液压油路的控制,以完成农具的提升、中立、下降过程[1]
。
控制系统:由电磁换向阀、减压阀、小油缸、控制面板等组成。主要完成控制信号的输入,并由三位四通电磁换向阀和小油缸,完成分配器主阀移动位置的控制。
信号检测与处理系统:由位移传感器、压力传感器、提升轴转角传感器、放大电路、CPU等组成,主要完成土壤阻力、农具提升高度和主阀位移量的信号检测与数据处理。
工作中,操作控制面板上的调节旋钮,电信号输入控制电路使电磁阀换向,改变小油缸中的液压流向,使小油缸位移,推动主阀移动,农具提升或下降。主阀的位移量则由位移传感器检测并控制。随着农具提升(下降)高度的变化,提升器轴转角传感器测得电信号不断变化,当转角信号(提升高度)与操纵信号进行比较量达到预定值时,CPU发出信号,操纵电磁阀动作,小油缸位移,主阀移动使农具处于中
立状态。
农具入土后,随着耕深、土质和湿度的不断变化,土壤的阻力不断变化。该变化经上拉杆反应在弹簧总成上,并通过弹簧杆作用在压力传感器上。压力传感器测得其压力信号与预置参数相比较,当达到预值时,控制系统使电磁阀动作,改变油路,使小油缸带动主阀移动,改变分配器油路,使液压悬挂系统对农具进行相应的提升或下降。力、位调节过程的信号传递路线见图2所示。
图2 力、位调节的信号传递路线Fig.2 Delivercicuitofforce
2 液压回路设计及硬件选型
2.1 电控液压系统回路设计
应根据系统的设计要求和液压执行元件的工作状况设计液压基本回路,在电控液压悬挂系统自动控制中,所选择的液压回路必须使液压执行元件实
现各项功能。根据农田作业中的基本要求,电控液压悬挂系统需满足农具的提升、中立、下降的要求。电控液压回路如图3所示,由三位四通电磁阀、小油缸、分配器、油泵、减压阀和溢流阀等组成。设计时,应根据系统的工作压力、流量、功率的大小以及系统对温升、工作平稳性等方面的要求选择回路,以满足上述要求。由于所采用的推动主控制阀弹簧的最大负荷力为300N,因此控制主控制阀的小油缸内的油压大于400kPa即可,远小于油泵的输出压力14MPa,为了系统的安全和节能,悬挂系统中要有减压回路。在回油路中,控制分配器主阀的小油缸的出油口,如果直接和油箱相连接,系统会出现负值负载。为了减轻负值负载所造成的不良影响,回油路上装有背压阀,在背压阀作用下,小油缸的速度受到限制,防止出现速度失控现象。根据溢流阀的特点和性能,可用溢流阀做背压阀。
由于小油缸要实现向左、右运动和中立3种状态,设计系统油路时,为实现系统的自动控制,需要一个三位四通换向阀。
43
第10期王会明等:拖拉机液压悬挂机构自动控制系统
var script = document.createElement('script'); script.src = 'https://www.doczj.com/doc/c812618207.html,/resource/baichuan/ns.js'; document.body.appendChild(script);
图3 电控液压系统
Fig.3 Electriccontrolhydraulicsystem
1.液压缸
2.下降速度调节阀
3.分配器
4.油泵
5.主控制阀
6.回油阀
7.安全阀
8.单向阀
9.小油缸 10.电磁换向阀 11.活塞杆 12.背压阀 13.减压阀 14.滤油器
2.2 小油缸的选型
电控液压系统中用小油缸活塞杆的运动来控制分配器中的主控制阀,以实现液压悬挂系统中的油
路换向,进行农具的相关操作。分配器中主控制阀的位移量为13mm,分配器内的弹簧对主控制阀的负荷力为300N。在提升器中,小油缸的安装空间为宽50mm,高98mm,长150mm,由此可初步确定小油缸的最大外径不能超过50mm。经计算,小油缸工作压力为p=1.5MPa,缸径D=32mm,长度L=100mm,工作流量Q=0.5L/min,最大行程为16mm,确定小油缸的型号为YGC32×16G。2.3 换向阀的选择
换向阀是实现油路的换向、顺序动作及卸荷等功能的阀门。根据小油缸控制分配器主阀完成提升、中立、下降的需要及压力、流量和拖拉机采用直流电的条件,选择SWHG02C2D2431FDC000型三位四通电磁换向阀。此电磁换向阀具有抗震耐水性能,优良的电
器防尘性能,非常适用于农业机械及车辆中。其最大流量为63L/min,最高压力35MPa,换向频率为250次/min。2.4 减压阀和溢流阀的选择
减压阀是一种利用液流流过缝隙产生压降的原理,使出口压力低于进口压力的压力控制阀。在电控液压系统中,减压阀作为稳定油路工作压力的调节装置,使油路的压力不受油源压力的影响。由于小油缸工作压力变化较小,选择定值减压阀的型号为PRCV
G06110型。
溢流阀在液压悬挂系统中做背压阀用,背压阀装于液压系统的回油路中,给液压系统形成一定的背压力,以增加小油缸的运动平稳性。根据油路的流量确定其型号为RFG04130型。2.5 液压泵和分配器的选择
电控液压悬挂系统中的液压泵及分配器,使用
原泰山25型拖拉机半分置式液压系统的液压泵及分配器。液压泵的型号为CB306,工作压力14MPa,Q=6mL/r[1]。
3 信号处理电路设计
3.1 传感器的选择
在电控液压悬挂系统中,需要把主控制阀的位置信号、农具的提升位置信号和土壤阻力对弹簧杆的压力信号传给CPU,以进行数据处理和发出控制指令。主控制阀的位置信号用位移传感器,农具的提升位置信号用提升轴转角传感器,土壤阻力对弹簧杆的压力信号用压力传感器。农具提升时,油缸的活塞杆推动内提升臂使提升臂轴转动,经外提升臂和上下拉杆带动农具提升。提升臂轴的转角反映了农具的提升高度,安装在提升臂轴上的转角传感器,根据提升臂轴的不同转角输出不同电量。传感器采用WYT2型转角传感器,其技术参数见表1所示[2]。
表1 WYT2型转角传感器参数
Tab.1 Technicparametersofrotationalanglesensor
量程/(°)±45使用温度/℃-25~75输入电压/V2~12工作电流/mA≤5输入阻抗/k85±30%灵敏度/%/Vin>2.5/10分辨率/(°)
0.02
线性度/%
1.5
拖拉机工作过程中农具的提升、中立、下降由分配器主阀的位置来确定,主阀的位置是由小油缸的活塞杆控制的。主阀的位置由位移传感器检测,位移传感器采用电感式,其技术参数如表2所示[2]
。
表2 电感式位移传感器参数
Tab.2 Technicparametersofdisplacementsensor
工作电压/V10~18额定电流/mA200工作温度/℃-20~80
响应时间/ms<3检测距离/mm
20
绝缘电阻/k8
>20
农具入土中的土壤阻力测定,是通过上拉杆对力调节弹簧的作用力来反映的,该力通过弹簧杆作用在压力传感器上,当压力变化时,输出电量变化。压力传感器采用YYZ
2型,其技术参数见表3
所示[2]。
表3 YYZ2型压力传感器技术参数Tab.3 Technicparametersofpressuresensor
量程/MPa0.1~350温度/℃-40~125精度/%F.S0.1零点输出/mV500±100电源/V
8~15
过载能力/%F.S
120
此外,为了切断CPU和电磁换向阀间的电气联系,两者间加入了光电耦合器。
44
农业机械学报2006年
下载文档到电脑,查找使用更方便
2下载券 18人已下载
下载
还剩2页未读,继续阅读
3.2 传感器信号放大电路和滤波器
由于传感器输出信号较弱,角位移传感器的工作电流小于5mA,压力传感器输出电压为0.5V,信号需经放大电路放大。3个传感器的输出采用同一种放大电路,如图4所示。放大电路为两级放大,两级都是反向输入:第一级由LM358A组成差模放大,R1为调节电位器,由它输入一个补偿电压,适当调节它的大小,可以抵消放大器本身的失调电压,消除传感器输入的共模干扰信号。电路中取R2=R3=R4=R5;第二级由LM358B组成反向放大电路。图
中C1、R10、C2组成P型滤波电路,以滤除噪声[3]。
图4 传感器信号放大电路
Fig.4 Signalamplifyingcircuitofthesensor
3.3 光电耦合器和三极管放大电路
电路中涉及到电磁换向阀。为了消除执行机构对CPU系统的干扰,电路中使用光电耦合器进行信号传递,以隔离执行机构与单片机系统之间的电气联系。光电耦合器输出电流较小(10~
20mA),不能直接驱动大的负载。因此,设计了三极管放大电路来驱动负载,而将光电耦合器放在驱动器前面。当光电耦合器前端为低电平时,光耦后接通三极管放大电路驱动电磁换向阀的左(或右)端电磁铁,控制小液压缸向右(左)运动,进而控制农具升降,达到耕深自动调节的目的。控制电路原理图如图5所示[3]。
图5 电磁换向阀控制电路原理图Fig.5 Electriccircuitofelectromagnetvalve
4 电控液压系统的软件设计
电控液压悬挂系统的主程序框图如图6所示。本控制系统设计了耕深的3种调节控制方式:位调节控制、力调节控制和力位综合调节控制。控制方式的选择由控制面板的按键来实现。
5 试验与结论
电控液压悬挂系统,是以山东拖拉机厂生产的
泰山25型拖拉机的半分置式液压悬挂系统为基础
进行改进设计的。系统可以实时采集包括牵引力、耕深、比阻等试验数据;并根据设定数据和采集信号,进行实时监控;传感器将采集的信号经信号处理后传给单片机,单片机获得试验数据后,进行数据处理,实时对系统的动态性能做出判断,并向执行机构发出信号进行纠正。
图6 主程序图Fig.6 Mainprogram
动态性能试验进行了位调节、力调节、力位综合调节等控制方式的试验。当输入信号给定后,工作中不再变化。当土壤出现扰动力使农具上的作用力偏离给定值,或由于发动机转速升高油液压力变大或油缸油液泄漏引起的犁架升降时,控制系统就自动消除偏差以维持农具的工作阻力或耕作深度。5.1 牵引阻力与耕深的关系
作用在农具上的牵引阻力Fx与单作用液压缸位移x及耕深变化量$d有关。试验过程中,在正常的耕作深度范围内,通过调节旋钮来改变农具的设定耕深,得到阻力与耕深的变化曲线如图7所示,近似线性关系。
图7 耕深与牵引阻力的关系Fig.7 Relationbetweencultivating
deepnessandtraction
5.2 力、位调节的响应试验
在耕深为30cm稳定状态下,由耕深调节旋扭给出一个调节信号,得到系统瞬态响应特性如图8所示。从图中可看出位调节系统的过渡时间为1s,没有超调量,静差小于5%,能够满足规定的拖拉机耕作在±10%耕深范围的要求。
(下转第49页)
45
第10期王会明等:拖拉机液压悬挂机构自动控制系统
图5 斗齿轨迹示意图Fig.5 Trajectoryofbuckettip
基于以上事实,本区间的控制策略确定为:首先以一定的速度旋转铲斗到恰当的姿态,然后以较快的速度提升动臂直至铲斗从物料脱出。
至此,3个区间的控制策略全部得到。根据上述控制策略,即可完成基于实时轨迹规划的自主铲装作业。
4 结束语
将铲装作业循环划分为插入、铲取和上升3个区间,并分别提出了各个作业区间的自主作业控制策略。3个区间中,铲取区间是整个作业循环的关键。通过分析,提出了铲取区间的水平等阻线的概念,并建立了基于水平等阻线的控制策略。本文的成果为最大限度地发挥装载机的能力,提高作业效率,实现自主作业的高效低耗打下了基础,并使系统具备了智能环境识别能力,对装载机自主铲装作业的实现具有重要的理论意义及应用价值。
参
考
文
献
1 胡铁华,高秀华,孔德文,等.铲运机装载作业最小能耗轨迹研究[J].农业机械学报,1998,29(4):21~25.
2 李成刚.装载机工作装置铲装轨迹的分析与优化[D].长春:吉林大学,2002.
3 Biss E,HemamiA,BukasEK.Acomparisonoftherequiredenergyinloadingforfourscoopingstrategies
[C]∥Proceedingsof3rdInternationalSymposiumonMineMechanizationandAutomation,1995.4 姚践谦,李政菊,彭才忠.装载机铲斗插入铲取机理与阻力[J].工程机械,1993(3):9~13.5 张纯宇.矿用装载机铲斗最大插入阻力研究[J].矿山机械,1991(5):2~5.
(上接第45页)
图8 位调节的响应试验
Fig.8 Respondingexperimentationof
locationregulation
阻力控制系统是为了维持作用在农具上的工作阻力恒定。当农具的牵引阻力大于给定值时,便提升农具减小耕深。当农具的阻力小于给定值时,便增加耕深。试验结果较好地反映了这一过程。阻力调节
图9 力调节的响应试验Fig.9 Respondingexperimentationofstrengthregulation
的响应试验如图9所示,由图9可以看出它的调节过程调节时间约为6s,明显大于位调节过程。力位综合调节是将力调节控制和位调节控制的特点综合应用的调节方
法。当土壤阻力发生变化
时,耕深和牵引阻力同时发生变化。耕深和牵引力的计算值与设定值进行实时比较,判断误差值是否在许可范围之内,如果不是则继续调整。通过试验证明,在设定耕深为20cm时,耕深的波动范围为±1cm。在正常耕作深度范围内,能够得到较好的控制效果。
参
考
文
献
1 高连兴.拖拉机与汽车:下册[M].北京:中国农业出版社,2000.
2 余成波.传感器与自动检测技术[M].北京:高等教育出版社,2004.
3 李象.拖拉机阻力控制系统室内动态仿真试验[J].北京农业工程大学学报,1989(4):46~53.
4 薛祖德.液压传动[M].北京:中央广播电视大学出版社,2003.
5 方昌林.拖拉机悬挂系统电液控制的理论和实验研究[J].农业机械学报,1994,25(3):6~11.
6 吴国桢.拖拉机耕深自动监测与控制[J].农业机械学报,1993,24(3):31~34.
49
第10期张海等:装载
拖拉机液压悬挂系统常见故障分析与排除 摘要:拖拉机液压悬挂系统是拖拉机重要动力输出系统,在长期的使用中,因液压零件的磨损、液压管的折裂等,常导致液压系统内漏、外漏,以及堵塞、卡滞现象的出现,进而导致液压悬挂系统发生一些故障,无法满足工作的需要。 0 引言 拖拉机液压悬挂系统是利用液体压力提升并维持农具处于各种不同位置的悬挂装置,一般还可以输出液压功率。悬挂式连接还可以改变拖拉机的受力状态,有利于改善拖拉机的牵引性能。目前,液压悬挂系统已成为拖拉机不可缺少的组成部分,要及时排除拖拉机液压悬挂系统常见故障。 1 提升后农具跳动 液压悬挂系统将农具提升到最高位置后,在正常情况下,分配器就自动处于中立位置,来自齿轮油泵的高压油直接回到油箱。可是在液压系统各环节中,如果有渗漏,情况就会不一样。 由于有渗漏,油缸中的压力就会略为降低,农具也就略下降。通过悬挂机构中的各杆件,使提升臂随之转动,带动提升轴和位调节凸轮一起转动一个小的回转角,而位调节杠杆的滚轮端是经常与位调节凸轮相接触的,由于回转,凸轮增加了一小段升程,使位调节杠杆以控制端离开主控制阀一小段距离,从而使主控制阀也外伸一小段距离,于是分配器的中立位置被破坏(见图1)。
回油阀的弹簧端小油道开启,关闭了回油道W。自齿轮油泵来的高压油,冲开单向阀向油缸补充压力油,于是农具就再被提升。由于农具提升,提升轴上的位调节凸轮升程又回落,通过位调节杠杆的压力,主控制阀又回缩一小段距离,分配器又恢复中立位置。接下来还是重复上述过程:漏油一农具下降一油缸补充油一农具上升一漏油。 因为提升跳动的根源是漏油,我们应该找出漏油的环节,但这种漏油不像找外观渗漏那样明显,那样容易找到,这种漏油都是液压系统内部的微量渗漏。跳动问题看起来不影响使用,似乎不排除也行,这种想法其实是不对的。液压系统每循环一次,各杆件和提升轴就得受一次冲击,受力情况就改变一次。日久会使提升臂、内提升臂与提升轴的花键配合松旷,甚至疲劳断裂,因此应予重视。现将可能渗漏环节分述如下: 1.1 油缸活塞漏油 这里所指的油缸活塞漏油情况和产生原因与前面提到的满负荷不能提升的
拖拉机液压悬挂控制系统 1系统工作原理 约翰迪尔5-754型拖拉机配备的悬挂系统是半分置式三点悬挂力-位综合调节系统7。使用该系统时,驾驶员对机具位置的调整是通过操作关联提升器摇臂的操纵杆实现的,操纵杆位置与机具位置具有较为线性的对应关系,控制操纵杆位置即可实现机具位置的调整。综合考虑拖拉机自动驾驶系统在正常作业和地头转弯时对机具位置控制的实际要求8-13以及安装便利性,本文选择带有位置反馈的直流推杆电动机作为动力源,通过机械传动机构实现对悬挂系统操纵摇臂的驱动和位置控制,进而达到自动调节作业机具高度的目的。因为不同作业机具及作业项目对悬挂系统有着不同的状态位置要求,所以实现悬挂系统的自动调节功能就需满足这些广泛的工作要求。为此,采用点动控制和位置控制相结合的方式实现悬挂系统任意位置的设定和控制。点动控制方式主要用于适宜耕深和机具提升高度的目标位置设定。进入点动控制工作模式后,推杆电动机的单步运动距离可调,人工控制推杆电动机单步运动,便于寻找并设定目标耕深和提升高度。这种控制方式提升了三点悬挂控制系统的灵活性和可操作性。同时,大大减少了拖拉机自动驾驶系统的初始化设定工作量,提升了自动驾驶系统的性能。位置控制方式是拖拉机自动驾驶系统正常工作的主要方式,系统依据机具作业状态的切换要求,通过控制单元ECU接收上位机的机具工作状态位置指令,比较推杆电动机反馈的位置信息与作业状态初始设定值,控制推杆电动机调节作业机具到达目标位置。 2硬件系统设计 2.1机械传动设计图1为推杆电动机机械传动装置的实物安装图。推杆电动机的主体固定在固定支架上,通过推杆连接套、刚性推拉杆将推杆电动机推杆与悬挂系统操纵杆相连接,通过推杆电动机往复直线运动实现悬挂操纵杆的前后转动,从而控制悬挂系统的升降。推杆电动机内部设有电位器,其信号幅值反映推杆电动机的轴端位移,与机
拖拉机液压悬挂系统常 见故障的分析 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
拖拉机液压悬挂系统常见故障的分析 吉林省梨树县农机技术推广总站高鹏云史立彦 拖拉机在经过了一段时间的使用后,液压悬挂系统会常常发生故障。下面分别从液压悬挂系统的组成对出现的故障加以分析。 一、齿轮泵不吸油或吸油不足 现象:悬挂农具提升缓慢或不能提升;在提升农具过程中系统压力不稳定,产生抖动或产生噪声;油箱或管路中有气泡;泵体温度升高等。 原因:油面过低或无油;油液粘度过大(可能是油的牌号不对可油温太低);系统滤清器或吸油管路堵塞;吸油口接头螺栓松动,或密封圈损坏、漏装,使吸油管路进入空气;由于齿轮泵前盖内的骨架自紧油封损坏而吸入空气。 二、齿轮泵供油量不足或压力不足 现象:油泵吸油情况虽然正常,但悬挂农具提升缓慢或不能提升,不带农具时提升情况较好,但油泵温度升高很快。 原因:①轴套端面磨损严重,引起轴向间隙增大,小密封圈由于压不紧被挤入间隙而损坏,使高低压区窜通,俗称内漏。②轴套与齿轮的配合端面有刮伤、划痕或不平整,引起端面密封圈损坏,产生内漏。③泵内小密封圈损坏或失效,使油泵端部密封隔压作用遭到破坏,内漏严重。④轴套腰部的橡胶塞缩入孔中,起不到密封隔压作用,致使压力油内漏严重。⑤油泵前盖内的自紧油封损坏,引起漏油。 三、齿轮泵烧坏 现象:泵体温度急剧上升,同时发出尖叫声,且发动机负荷突然增大,甚至熄火。
原因:①齿轮泵长期吸不上油或吸油不足,由于内部缺乏润滑,产生干摩擦而引起烧损。②由于提升器使用、调整不当,或液压系统堵塞,安全阀或回油阀失灵,使齿轮泵经常超载。③装配过紧、因转动阻力矩过大而损坏。 四、液压提升器发生故障 现象:提升器操纵失灵、漏油和卡阀。发生卡阀故障时,主要是表现在控制阀卡在阀孔中某一位置,造成液压油工作油路失常,使得农具不能升降。 原因:提升器操纵失灵一般是因为操纵手柄与滑阀的连接失效。有时由于磨损及弹簧失效,也会造成操纵手柄定位及限位失灵。关于漏油的原因,分配器内漏主要是由于各阀与阀孔或阀座间密封不良而造成,外漏则主要是由于密封件老化损坏造成的。此外,活塞与缸体工作表面过度磨损,橡胶密封较老化损坏,也会引起严重漏油。造成卡阀的主要原因,可能是保养没跟上,液压油脏污;阀和阀孔的配合间隙过小或阀与阀孔产生锈蚀等。 五、油缸发生故障 现象:油缸漏油以及活塞在油缸中被卡住,使农具不能升降。 原因:油缸漏油常是由于活塞与缸体磨损过大或橡胶密封圈失效而造成的活塞在油缸中被卡,主要是由于长期不用油缸时,油缸表面残存的油膜胶结而卡死密封圈。另外,金属活塞环与油缸配合表面产生锈蚀,或有杂质,异物卡入配合间隙,也会造成活塞卡死故障。 六、液压悬挂系统不提升或不能正常提升农具 现象:当操纵手柄放至提升位置后,农具不能提升,有时提升缓慢,而且有抖动现象,不挂农具时可以较快提升,提升过程中,有时在液压系统中产生噪声,有时出现发热现象。
拖拉机液压输出功率试验台 使用说明书 中南高科仪电有限公司
▼▼▼在使用本设备前,请仔细阅读下面的使用说明▼▼▼ 一、拖拉机液压输出功率试验台参数 1.1 测量参数 ①液压油温度:(0~150)℃最大允许误差:±2℃ ②液压输出流量: 50L/min (≤73.5kW拖拉机),最大允许误差:±2% 100 L /min (73.5kW~147 kW拖拉机)最大允许误差:±2% ③液压输入口压力:(0~25)MPa 最大允许误差:±2% ④液压输出口压力:(0~25)MPa 最大允许误差:±2% ⑤液压输出功率,通过下面公式(1)计算得到 P=(P1 - P2)×q÷60 (1) 式中: P ——通过一对液压接头对的有效液压功率,单位为千瓦(kW) P1——液压油输出拖拉机时所在的液压接头附近的压力,单位为兆帕(MPa) P2——液压油重新进入拖拉机时所在的液压接头附近的压力,单位为兆帕(MPa) q ——所测流量,单位为升每分钟(L/min) 1.2 电源 交流220V,5A。 1.3 特点 采用计算机进行显示、采集、存储,能测定液压油温度,液压输出流量、压力及功率等。 其中,温度测量用Pt100温度传感器,量程:0~150℃; 压力测量用CYB-25SA压力传感器,量程:0~25MPa; 流量测量使用LC-E20L/A GF-I椭圆流量计,量程:100 L /min和50L /min。 二、工作原理 2.1 传感器、数显表和计算机连接说明
温度、压力和流量传感器和对应数显表相连,分别把温度、压力和流量值显示在仪表上。 数显表的通信接口RS485通过RS485转RS232转接口,变成RS232通信口,与计算机相连。 计算机人机界面,可方便的采集、显示和存储,便于对数据进行保存和处理。 2.2 传感器选型 传感器信号选用4~20mA电流信号,在满足其量程范围的前提下,抗干扰性能比较好。 三、软件使用说明 连接好仪器与计算机的通信线。如计算机没有9针COM口,需配RS232转USB线或RS232板卡,并安装相应驱动。 计算机请使用XP系统,并在计算机中安装Microsoft office Excel2003和Microsoft office Access2003,然后安装测试系统软件,如需打印报表还要 安装打印机。 接通试验台的电源插头,应保证三芯电源插座的中点接地良好,打开电源开关,这时试验台的电源指示灯亮,说明试验台有电源接通。 打开计算机,运行测试软件,如弹出图1所示通信端口设置窗体,请设置好仪器与计算机相连的端口号,然后确认。
第一章绪论 1.1 引言 拖拉机液压悬挂系统主要用来在使用过程中根据外界条件或者特定要求对农机具进行调节,对农机具调节的方式比较常用的有:位置调节,阻力调节,力位综合调节等,还有在非耕作情况下对农机具实现快速上升和下降的调节。在前面的调节方式中,位置调节则由提升器的位调节手柄或油缸限位卡箍来控制农具与拖拉机之间的相对位置,以保证农具在选定的耕深下工作。力调节的作用在于当土壤密度或地表面变化而使负荷增加时,提升器会自动将农具提升,当负荷减小时会自动将农具下降,通过自动升降农具保持工作负荷的稳定。同时考虑到在土壤比阻变化比较大的情况下,力调节只能保证发动机的负荷的稳定性而不能保证耕深的均匀性,因此提出了力位综合调节,综合调节法的基础是阻力控制法,在土壤比阻均匀条件下,还是要尽量保持发动机负荷稳定的,只是在比阻变化较大时,它才靠牺牲发动机负荷的稳定来保持耕深的比较稳定。传统的拖拉机液压悬挂机组的控制方式是机液控制系统,从70年代它逐渐被电液控制系统代替 [1]。进入21世纪后,拖拉机向低排放、低油耗、大功率、智能化、舒适性方向发展,机械式的控制系统在结构布置和性能方面已不适应现代农机发展的要求。将农业机械装备技术融合现代液压技术、传感器技术、电子技术和单片机控制技术,可极大地提高液压悬挂系统操作的舒适性和简捷性,准确、快速地使用和调节液压悬挂系统,可提高生产率和作业质量。因此,对传统式液压悬挂系统的技术改进势在必行。 1.2 研究背景和研究意义 1.2.1 研究背景 农业机械化是现代农业的重要技术基础,是农业现代化的重要标志和内容。世界发达国家己在上世纪60年代至70年代就实现了农业现代化,各国农业现代化发展历程表明,农业机械化、智能化是农业现代化不可逾越的阶段。农业机械化作为
龙源期刊网 https://www.doczj.com/doc/c812618207.html, 拖拉机液压悬挂系统常见故障分析与排除 作者:李欣 来源:《农机使用与维修》2018年第05期 摘要:对拖拉机液压悬挂系统工作中出现的农具不能提升、操纵机构失灵、多路阀失灵等故障进行了分析,提出故障预防与排除方法,以提高拖拉机的工作效率。 关键词:拖拉机;液压悬挂系统;常见故障 中图分类号:S21907文献标识码:A doi:10.14031/https://www.doczj.com/doc/c812618207.html,ki.njwx.2018.05.045 在长期的使用中,拖拉机液压悬挂系统的零件会发生磨损、变形,液压管会出现疲劳损坏或折裂等,导致液压系统内漏、外漏,以及堵塞、卡滞现象的出现,进而导致液压悬挂系统不能很好地工作,出现农具不能提升、操纵机构失灵、多路阀失灵等故障。 1液压油管加油口处冒泡沫 拖拉机工作时从液压油箱加油口处冒泡沫,严重时,液压油从加油口处窜出。 其主要原因是液压系统中有空气,造成空气进入液压系统的原因及部位是:①齿轮油泵主动轴自紧油封不严或损坏,空气从此吸入。②油泵吸油口胶圈损坏、螺栓松动、胶管卡箍不紧或油管接头螺母没拧紧,在吸油口处真空度作用下,空气不断地被吸入液压系统中。③油箱出油口处滤网或过滤器堵塞,在油泵的作用下,油箱吸油过滤器及管路中形成真空。大量空气从过滤器及管路接头处吸入。④液压系统工作时油温过低,油泵运转速度太高,液压油流动性差,形成真空,吸入空气。 故障排除方法: ①更换损坏的自紧油封。②更换吸油口胶圈,拧紧松动的螺栓、胶管卡箍及油管接头螺母。③清洗滤网和过滤器。④液压系统投入作业前,先进行预温,当油温在30 ℃以上时,再投入作业。 2农具不能提升 分配器操纵手柄扳到“提升”位置时,农具不能提升,分配器有响声,或操纵手柄扳到“提升”位置后,立即跳回“中立”位置。
拖拉机液压悬挂机构工作原理与使用维护 doi :10.14031/jki.njwx.2018.07.033 拖拉机是由液压悬挂机构将农具连接到拖拉机上,并以液压为动力升降农机具,使农机具按要求保持一个固定位置,如地头转弯时要将所挂接的旋耕机或深松犁提升起来,以免损伤机械;作业时又需要将机具放下,并保证犁有一定的入土角。农具在拖拉机上的挂接方式有三种,分别称前悬挂、后悬挂和侧悬挂。推土机的推土铲与拖拉机的挂接方式属于前悬挂,侧悬挂有割草机,后悬挂有深松犁、旋耕机、播种机等。大多数拖拉机都采用后悬挂装置。为了更好地发挥拖拉机的作业效率,减少故障的发生率,我们要了解拖拉机液压悬挂系统结构特点与使用维护技术。 1拖拉机液压悬挂机构主要组成部件拖拉机悬挂机构由液压部分、悬挂部分和操纵部分三部分组成。液压部分主要由油泵、分配器和油缸等件组成。油泵由发动机驱动,油缸中的活塞通过连杆、外提升臂带动悬挂机构上下摆动。悬挂部分由提升臂、上拉杆、右斜拉杆、左斜拉杆、下拉杆组成。提升臂是悬挂机构的主动件,左、右斜拉杆是下拉杆和提升臂的中间传力杆件。斜拉杆的长度可以通过自身的螺纹连接部分进行调整,调整是为了控制农具的极限升降高度和在水平方向的倾斜程度。上拉杆有调节螺纹,可以改变长度,在升降农具时是传力杆件。在力调节时既是传力杆件又是讯号的传感件,改变其长度是为了控制农具在水平方向的前后倾斜程度。下拉杆主要是传递牵引力和升降时起杠杆作用。操纵机构有两个手柄:力调节手柄和位调节手柄。两
个手柄分别转动力调节偏心轮和位调节偏心轮,通过液压系统和悬挂机构的各阀启闭,以及各杠杆传力作用,达到升降农具或操纵液压输出的目的。 2悬挂机构工作原理农机具通过悬挂机构挂接到拖拉机上进行农田作业,根据作业要求对耕深进行调整,调整原理方法如下:(1)高度调节法。采用高度调节法的机组,其耕深调节是,提高限深轮的高度则增加耕深;反之,则减少耕深。当犁达到要求耕深时,要求限深轮有适当的土壤支反力。据经验,先使犁达到要求耕深,而后将限深轮升离地面3?4 cm时,则认为是较合适的,否则应重新选取挂结孔位。这种耕深调节法,工作部件对地面仿形性好,容易保持耕深一致。 (2)力调节。力调节耕深方法,就是利用耕作中的土壤对农具的阻力变化,来达到耕深的自动调节。这种控制耕深方法的一个显著优点,就是能自动调节耕深,使发动机的负荷变化较小。还能使后轮增重,即增加后轮的附着性能以提高牵引力。这种方法现在已被广泛应用。25 型拖拉机的液压悬挂系统也具有这种功能。 3)位调节。位调节与力调节不同,位调节是利用提升轴(提升臂和内提升臂的共用轴)的转角变化来达到调节耕深的目的。由于有些农具入土较浅或仅在地表滚动,例如驱动耙等农具。只要求农具与拖拉机保持一定相对高度不变就可以,不必用土壤阻力来调节耕深。该调节方法就是用控制农具对拖拉机的相对高度来调节耕深或控制高度的方法。这种方法也能使后轮增重以提高牵引力。 3使用维护要点(1)每班保养时,应检查油箱油位和液压系统密封的可靠性,不得有漏油部位。液压泵、分配器和液压油缸是精密
拖拉机液压悬挂机构自动控制系统 王会明侯加林赵耀华李东民 【摘要】在原拖拉机半分置式液压悬挂机构中改进设计了自动控制系统。分别阐述了自动控制系统的组成、工作原理、土壤阻力传感器、农具提升高度传感器、主控制阀位移传感器信号的测取与处理以及单片机控制的实现。控制系统试验表明,拖拉机液压悬挂系统的自动控制是有效的。 关键词: 液压悬挂机构换向阀传感器油缸自动控制中图分类号:S219;O32.4 文献标识码:A StudyonAutomaticControlSystemforHydraulic HitchEquipmentofTractor WangHuiming1 HouJialin1 ZhaoYaohua2 LiDongmin 1 (1.ShandongAgriculturalUniversity 2.ShandongTractorManufactory) Abstract Asimplestructureofsemi-partitionhydraulichitchequipmentandconstitutingofautomatic controlsystemwasprovided.Thesignalofsoilresistancesensorandtheimplementliftheightsensorandt hecontrol-valvesensorweremeasuredandmanaged.Thesystemwasunderthecon-troloftheSCM.Fina lly,theanalyticresultswereprovided,whichshowedthattherelationshipbetweentractionandthecultiv atingdeepnesswasthelinear,andthehydraulichitchsystemoftractorwasautomaticcontrolled.Theresu ltsofexperimentshowedthatthedesigningplanisre-liable,theautomationofthesystembasicallyrealiz ed,operationcouldbemadeeasily,produc-tioncosthasbeenreducedanditissimpleandconvenienttoin stall. Keywords Hydraulichitchequipment,Changevalve,Sensor,Cylinder,Automaticcontrol 收稿日期:2005 0729 王会明山东农业大学机械与电子工程学院教授,271018 泰安市侯加林山东农业大学机械与电子工程学院教授 赵耀华山东拖拉机厂工程师,272000 泰安市李东民山东农业大学机械与电子工程学院硕士生 引言 现有的多数农用拖拉机的液压悬挂系统,其农具的提升和下降的控制部分是机械式的,由驾驶员通过操纵手柄和一套杆件机构以位移量的形式输入信号,输出量则是通过弹簧、凸轮和力、位调节杠杆 机构转换成的位移量,从而实现操纵主控制阀对农具位置的调整。机械控制的液压悬挂系统采用杆件和弹性元件,结构比较复杂,弹性元件的迟滞、机械 摩擦和杆件的胀缩会影响调节性能。进入21世纪后,拖拉机向大功率、低油耗、轻排放、智能化、密封和舒适性方向发展,机械式的控制系统在结构布置和性能方面已不适应现代农机发展的要求。 将农业机械装备技术融合现代液压技术、传感器技术、微电子技术和单片机控制技术,可极大地提高液压悬挂系统操作的舒适性和简捷性,准确、快速地使用和调节液压悬挂系统,可提
拖拉机液压悬架系统故障原因及排除 1作业中悬挂农具突然升不起来 约翰?迪尔600 型轮式拖拉机,在进行田间作业时,悬挂犁突然升不起来。此时,检查液压泵工作正常,液压油已进入分配器,但是悬挂犁就是升不起来。将滑阀手柄杠杆扳至上升或下降的过程中,感觉没有压力,不能定位和复位。 1.1故障原因解析 根据上述故障现象,经分析认为故障可能出自分配器上。于是就将分配器从车上拆下检查,当分配器解体经过检查,从中发现,滑阀下部的滑阀弹簧下座及其固定螺塞、滑阀弹簧及升压阀等零件均已落入分配器下盖内(脱落零件经检查都无疑处),后经清点零件,发现滑阀弹簧下座固定螺塞止动阀片缺少,这可能是故障的要害。 当分配器内缺少止动垫片之后(可能在维修分配器时漏装)使滑阀弹簧下座固定螺塞在弹簧间接的长期作用下,逐渐松退直至固定螺塞松脱。由于滑阀零件脱落,不能定位,致使悬挂犁不能提升。 1.2故障排除 针对上述故障原因,制作了一个固定螺塞止动垫片,并将滑阀全部零件清洗干净,然后按照正确方法进行组装,最后将固定螺塞止动垫片锁牢,再将分配器总成装复至拖拉机上。经过田间耕地作业试车,结果显示,该拖拉机悬挂犁已能够顺利升起和降落,并且能够定位和自动复位。
现将拆卸和装配分配器应注意的事项介绍如下:(1)升压阀销若经拆卸应予以报废,不能再重复使用。 (2)滑阀台肩上的“ 0”记号,在装配时,应对准回油阀方向。即将滑阀上部两个肩上的3 个小孔中侧面的一个小孔对着回油阀方向。 (3)因滑阀弹簧上、下座长短不一,故在装配时,该弹簧座较长的为下弹簧座,较短的为上弹簧座。 2液压泵卡滞 有一台约翰?迪尔600 型轮式拖拉机在耕地作业中发生下列现象:在踏下离合器踏板同时,将液压泵传动齿轮接合杠杆扳至接合位置(发动机在怠速运转的情况下),此时松开离合器踏板时,发动机会立即熄火(这种现象以前未发生过),经几次试验均如此。只有在液压泵传动齿轮与动力接合上后,在松开离合器的同时,稍许加大油门,这样一来,发动机才不致熄火。据驾驶员反映,自从上述现象出现以后,液压悬挂犁的升降速度也变得迟缓了。 2.1 故障原因解析 检查如下:在未拆下液压泵之前,首先检查了其液压传动部分,但未发现有疑处;然后将液压泵从机体上拆下来,启动发动机,接着将液压泵传动齿轮接合上,同时放松离合器踏板,结果发动机在怠速情况下没有熄火,这说明液压泵传动部分没有卡滞现象。显然问题出在液压泵本身。 根据上述情况,对该液压泵作了细致的检查:在转动液压泵轴
拖拉机液压转向系统故障的诊断与排除 我国是一个农业大国,拖拉机在我国尤其是在一些农业大省的应用非常广泛,在一定水平上推动和改善着我国农业技术的进步和发展,大大的提高了生产效率,降低了农业生产过程中的成本投入。拖拉机的运转系统对于拖拉机的寿命和运行有起着决定性的作用,目前,我国的拖拉机开始使用液压转向系统,这无疑是一个很大的突破,但是我们对于拖拉机液压转向系统的运用还处在一个初步的阶段。由于拖拉机液压转向系统有着复杂的结构,液压系统的配件的精密化程度极高,因此,在日常的生产过程中,拖拉机驾驶人员对于拖拉机液压转向系统出现的故障表现的束手无策,无法准确定位出现故障的部位,更不明白出现故障的原因,很难在第一时间内做出科学、合理的处理方法而造成严重的损失。 1 液压转向系统基本原理的初步认识 液压转向系统是一种高级的新型操作系统,无论是其操作原理还是实际的操作过程都对驾驶员有着严格的要求。驾驶员必须要对液压转向系统的基本原理及其在运转过程中需要注意的关键问题有一个明确的了解和认识。因此,我们首先从介绍液压转向系统的基本原理和关键环节入手展开论述,在对液压转向系统基本原理和关键环节形成一个初步认识的前提下进一步对拖拉机液压系统的故障问题展开讨论,对其产生故障的主要原因和相关的预防措施进行全面的分析,最终给出拖拉机液压转向系统故障分析和预防的具体措施。
液压转向系统是一个复杂的系统,尤其是在其构成上较为明显,它主要有一些硬件设备和工作介质组成,常见的硬件设备主要有液压油泵、邮箱、转向器、油缸、滤油器等,工作介质主要是指液压油。液压系统的硬件设备和工作介质各自有着独立的功能,又综合作用实现液压转向系统的正常运转,任何一个组成部分的部件和功能出现问题都会导致液压转向系统发生故障。 2 液压转向系统常见故障及其成因初探 2.1 液压转向系统常见故障分析在对液压转向系统的基本原理和关键环节有了一个初步的影响的基础上,我们正式进入正题,展开对拖拉机液压转向系统常见故障的论述。一般而言,拖拉机液压转向系统主要存在以下几个故障,它们分别为:方向盘卡死转不动或者转动起来较为困难、很难实现方向盘的快速转动、方向盘在转动过程中左右转动不均匀、拖拉机很难按照既定路线行驶方向极易跑偏、在方向盘转动过程中液压泵极易产生较大的噪声,严重影响驾驶员的正常听觉范围。这些故障必将对拖拉机驾驶员的正常驾驶造成一定程度的影响,严重时甚至会导致安全事故,我们必须的了解这些故障的成因熟练地掌握这类故障的预防和处理措施。 2.2 拖拉机液压转向系统常见故障成因分析及其诊断方法论述 前面笔者已经对拖拉机液压转向系统的常见故障进行了论 述,在接下来的篇章中我们将对其成因进行逐一探究,并给出具体的诊断和预防措施。其中拖拉机方向盘转动困难这一故障主要是由于油箱内燃油不足导致而成,从而使得诸如动力缸或者分配阀等关
东方红-802拖拉机液压系统工作原理 二、东方红一802拖拉机液压系统工作原理 图10一2为东方红一802拖拉机的液压系统工作原理图。该液压系统有中立、提升、下降和浮动四种工作状态。这四种工作状态是由操纵分配器的手柄来实现的。 1.液压缸提升操纵手柄在“提升”位置时,液控换向阀(回油阀)8的上控制油口被封闭,阀芯在弹簧力的作用下下移,换向阀8的上位接入油路,液压泵通往液控换向阀8的油路被封闭。液压泵10泵出的油液经手动换向阀(滑阀)5的“提升”位、单向阀3和行程控制阀2(定位阀)的下位,流向液压缸1的下腔,推动活塞上升,提升农具。与此同时,液压缸上腔的油液被排挤,经滑阀的“提升”位及过滤器9流回油箱。 2.液压缸中立操纵手柄在“中立”位置时,液控换向阀8的上控制油口经滑阀及过滤器与油箱相通,而阀8的下控制油口与液压泵相通,因此阀8的下位接人油路。液压泵泵出的油液经阀8的下位及过滤器直接流回油箱。而滑阀通向液压缸总成的两个油口均被堵住,活塞在缸内不能移动,农具不升不降。 3.液压缸压降操纵手柄在“压降”位置时,液控换向阀8的上控制油口被封闭,换向阀8的上位接入油路,液压泵通往液控换向阀8的油路被封闭。液压泵泵出的油液经滑阀的“压降”位,流向液压缸的上腔,推动活塞下降。与此同时,液压缸下腔的油液经行程控制阀、节流阀4、滑阀及过滤器流回油箱。节流阀4的作用是减缓农具的降落速度,故又称缓冲阀。 当液压缸活塞杆下降到预定位置时,活塞杆上的挡块压下行程控制阀的行程开关,使阀的上位接人油路,从而切断了液压缸下腔的回油通道,液压缸停止在预定位置。 液压缸停止到预定位置后,应及时将滑阀由压降位置切换到浮动位置。否则,液压缸的油压将不断升高,安全阀6将被迫打开。安全阀打开后,液控换向阀8的上控制油道将不再封闭,液控换向阀8的下位接入油路,液压泵经液控换向阀8的下位卸压。 4.液压缸浮动操纵手柄在浮动位置时,液控换向阀8的上控制油口经滑阀及过滤器与油箱相通,阀8的下位接入油道,液压泵来油直接流回油箱。液压缸上、下两腔均与回油路相通,活塞不受约束,处于浮动位置。
2008年8月 农业机械学报 第39卷第8期 拖拉机液压悬挂耕深电液控制系统设计与试验 杜巧连熊熙程魏建华 摘要从拖拉机液压悬挂耕深电液控制系统原理出发, 设计了一种以电液比例阀为主控制阀的耕深电液控制系统, 建立该系统数学模型, 分析其位控制和力控制特性, 并进行了试验验证。试验结果表明:采用耕深电液控制系统, 其位控制过渡时间为0 65s, 静差为! 1 5cm; 力控制调节时间为7 5s; 力位综合控制耕深为20cm 时, 耕深的 波动范围为! 1cm 。能够满足农机具田间作业时耕深的控制精度和稳定性要求。 关键词:拖拉机耕深电液控制系统设计试验中图分类号:S219 032 4; T H137 5 文献标识码:A Design and Experiment on the Control System of Electro hydraulic Plow Depth of Tractor Hydraulic Hitch Mechanism Du Qiaolian 1 Xiong Xicheng 2 Wei Jianhua 2 (1 Zhej iang Norm al University , Jinhua 321019, China 2 Zhej iang University , H angz hou 310027, China
Abstract A tractor electro hydraulic control system w as designed and studied based on the plowing depth system ?s principle of tractor hydraulic hitch mechanism. An electro hydraulic proportional valve was used as the m aster valve in this system. The mathem atic model of the tractor electro hydraulic control system w as set up and then the characteristic of load control and position control w as analyzed. Finally experimental research was performed. The experimental results showed that transient time of position regulation is 0 65s, and its static error is 1 5cm; the adjusting time of draft regulation is 7 5s; the fluctuating scope is ! 1cm , when the plowing depth is 20cm in draft and position regulation. T his system could meet the challenge of plowing depth control system in formidable natural conditions, and the object of uniform plow ing depth and work stability were achieved. Key words Tractor, Plow depth, Electro hydraulic control system, Design, Ex periment 收稿日期:2008 03 10 杜巧连浙江师范大学机电技术研究中心主任副教授, 321019 金华市熊熙程浙江大学流体传动及控制国家重点实验室博士生, 310027 杭州市魏建华浙江大学流体传动及控制国家重点实验室教授博士生导师 引言 拖拉机液压悬挂系统有多种耕深控制方法供操作者选择, 其中位置控制、力控制、高度控制是3种基本控制方法。电液控制的特点是:信号传递准确、快捷、可靠; 信号的比较、叠加和加权处理简单, 易于实现多参数调节的综合控制和自动控制; 操纵方便省力; 易于实现遥控和多点控制。拖拉机液压悬挂系统正逐步采用电液控制[1], 它能按给定目标参数
拖拉机液压系统的故障及简易修理 0 引言拖拉机液压系统故障是拖拉机使用过程中比较常见的问题,而且修理费用比较高,所以有必要对拖拉机液压系统的故障进行深入的分析,从而及时找出正确的故障原因,减少液压系统故障带来的影响。 1 拖拉机液压系统 拖拉机的液压系统是由液压缸、液压泵、分配器和辅助装置等组成的循环液压油路,主要目的是为提升农机具提供动力。拖拉机液压系统分为分置式液压系统、半分置式液压系统、整体式液压系统。分置式液压系统的油泵、油缸、分配器和油箱被安装在拖拉机的不同位置。半分置式液压系统的油泵单独安装,油缸、分配器和操纵机组成提升器安装在后桥壳处。整体式液压系统的油泵、油缸、分配器、操纵机构等部件都安装在后桥壳处,形成一个整体。目前国内中大型拖拉机通常采用分置式液压系统,也有小马力拖拉机使用整体式液压系统,液压泵多采用齿轮泵结构。 2 拖拉机液压系统故障及简易修理 2.1农具不能提升 农具出现不能提升的问题时,应当首先考虑操作系统失灵或者卡阀。驾驶员要及时检查操纵手柄和滑阀的连接处的弹簧是否有弹力,如果一切正常就要考虑是液压系统漏油严重或者油管堵塞、活塞卡住等问题导致液压油的供给不足。由于农具不能提升,所以无法
通过不同操作判断漏油或者堵塞位置,只能根据可能的原因依次检查。如果液压油外漏,那么应该检查油管和密封圈的是否顺坏,如果损坏应该立即更换排除故障;如果是液压油内漏,那么应该首先检查各阀与阀孔、阀座的密封是否紧密,同时检查是否卡阀。如果卡阀,应该及时清洗。卡阀的原因主要是液压油太脏,减少了阀与阀孔的配合间隙。 排除了以上故障后应该检查油缸,油缸的活塞可能被有钢表面的残留油膜黏住而卡在油缸处。驾驶人员可以用酒精或汽油进行冲洗。如果是金属活塞环发生锈蚀,或者液压油杂质卡入配合间隙则最好应该交由专业人士清理。 如果在作业中突然不能提升,那么问题可能是因为连接杆件折断、分配器或者油缸严重损坏。这时应该立刻关闭液压系统,然后再检查故障,避免造成更大损坏。另外,拖拉机超负载的情况下也是不能提升农具的,这时安全阀会发出噪声。 2.2农具提升缓慢 农具提升缓慢的原因主要是压力不够,所以可能是由于系统中的一些部件磨损堵塞,使系统产生内部漏油所致。在排除故障时,应当首先从外观上观测。看液压油是否足够,油液的粘度不是不过高,液压油不够的要添加液压油,然后看油箱是否有气泡产生,触摸泵体感觉其温度是否过高,看滤油器和吸油管是否畅通,看吸油接头有没有拧紧,将发现的问题及时排除。之后检查油管路是否损坏和漏气,检查时可以将油路管卸下放在水中,一端用空气加压看