异步电机矢量控制方案论证
一,概述
三相异步电机具有结构简单,牢固,维修方便,价格便宜等特点,目前在工业领域中得到广泛应用。早期的变频调速采用变压变频(VVVF)速度开环的方式,基频以下为恒压频比控制,在低速时,提高电压以补偿定子阻抗压降。这种调速方法的控制结构简单,成本低,适用于风机等对调速系统动态特性要求不高的场合,但是对于动态和静态性能要求高的场合,这种开环系统就无法提供足够的保障。
1971年德国西门子公司的F.Blashke等革命性地提出了“感应电机磁场定向控制原理(Fieldorientation)”,即矢量控制技术,使交流传动的转矩静动态特性取得质的改善,完全可与直流调速系统相媲美。矢量控制的实质是利用美国A.A.Clark提出的“感应电机定子电压的坐标变换控制”原理。经过不断的实践和改进,形成了现已得到普遍应用的矢量控制变频调速技术。矢量控制通过引入坐标变换,把复杂的异步电机等效为简单的模型,在保证磁场准确定向的情况下,可以实现励磁电流和转矩电流的解耦,使得交流电机的转矩控制性能可以与直流电机相比拟,这无疑是交流传动控制理论上的一个质的飞跃。
转子磁场的定向控制就是在将旋转坐标系放在同步旋转磁场上,将电机的转子磁通作为旋转坐标系的直轴。若忽略由反电动势引起的交叉耦合,检测出定子电流的直轴分量,就可以观测转子磁通幅值,但转子磁通恒定电磁转矩与定子电流的交轴分量成正比,通过控制定子电流的交轴分量就实现对电磁转矩的控制,此时称定子电流的直轴分量为励磁分量,定子电交轴分量为转矩分量。可由电压方程的直轴分量控制转子磁通,交轴分量控制转矩从而实现磁通和转矩的解耦控制。转子磁场定向的最大的优点是达到了完全解耦,无需增加解耦器,控制方式简单,具有良好的动态性能和控制精度。
在异步电机矢量控制中,要实现准确的解耦,必须要知道转子磁链准确的相位角。而在直接矢量控制中,为了实现磁链的反馈控制,还要知道转子磁链准确的幅值。通过异步电机定子侧电压、电流,以及转子转速等电机运行参数,通过实时计算得到转子磁链的准确位置和大小,这种技术就是磁链观测器,在矢量控制中,常用的转子磁链观测器有电压模型和电流模型两种。以及基于这两种模型的若干种改进的算法。本文将论述磁链观测器的实现方法以及优缺点比较。
同时在高性能的异步电机矢量控制系统中,转速信息的获取是必不可少的。电机速度信息的辨识方法,分为直接法和间接法。直接法就是通过电子式或机电式速度传感器,如霍尔效应器件(HALL)、光学编码器、旋转变压器等,以及处理电路、处理软件等来获取电机速度信息。间接法就是通过测量电机的定子电流、定子电压等信号,根据电机的模型间接估计辨识电机的转速信息。然而由于速度传感器的安装给系统带来了一些缺陷。同时在一些应用场合并不能安装测速原件,而在感应电机速度闭环控制中需要电机转速信息,一些矢量控制策略中也需要知道电机转速。在理论上通过感应电机的电压和电流可以实时计算出电机的转速的理论,从而可以不需要速度传感器实现磁场定向控制和速度闭环控制,即无速度传感器控制。从高精度及可实用化的角度出发,闭环的转速估算方法中的PI自适应控制器法和模型参考自适应系统法(MRAS)法较容易实现。本文将着重对各种MRAS方法的转速辨识进行比较。
电机的参数辨识主要包括电机起动前的离线辨识和在线辨识两个方面,前者是指在控制系统设计初期,通过一系列的实验得到需要得到异步电动机的定、转子电阻,定、转子之间的互感,定、转子漏感,转动惯量等参数。在异步电机矢量控制中,定子电阻和转子时间常数(主要是转子电阻)等电机参数是磁链观测和转速辨识的依据。而它们随电机温度和工况变化的变化量可以达到原值的0.75到1.5倍,因此电机参数的在线动态辨识尤为重要,如果不及时补偿,会带来估计误差并进而使得系统性能恶化。本文将论述,如何辨识转子电阻以
提高磁链观测的精度。
本文将针对空间矢量PWM 中死区效应对输出电压的影响的基础上,提出了一种死区补偿策略,将三相电流分成六个区域,并在每个区域只对其中一相输出电压进行补偿。通过判断输出电压矢量的角度来获取三相电流的方向,避免了电流检测中出现多个零点的现象。
本文将通过比较实现矢量控制的各个环节。
二,磁链观测器
1,电压电流模型的磁链观测器由电机模型在定子静止两相坐标系下的方程,可以推出:
00r s s s s r r r s s s s m m u i R L p L L p u i R L p L L αααβββσσΨ+????????=?????????Ψ+?
???????其中,s R ,s L 分别为定子电阻和定子电感;m L ,r L 分别为定转子互感和转子自感;)2
1m r s L L L σ=?为漏感系数,p 为微分算子。
此方法的磁链观测器实际上就是对反电势的纯积分。其优点是算法简单,算法中不含转子电阻,不需转速信息等。
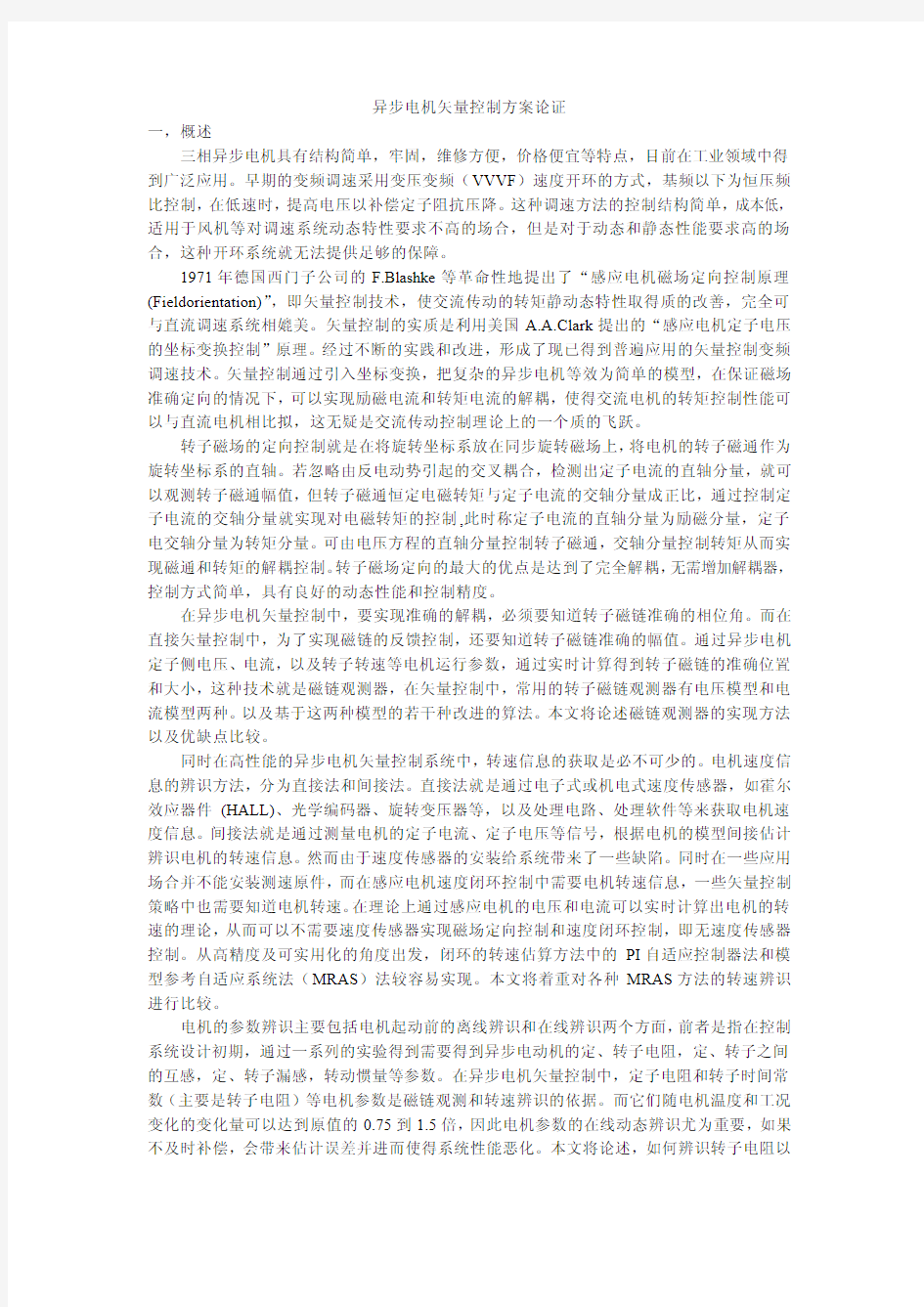
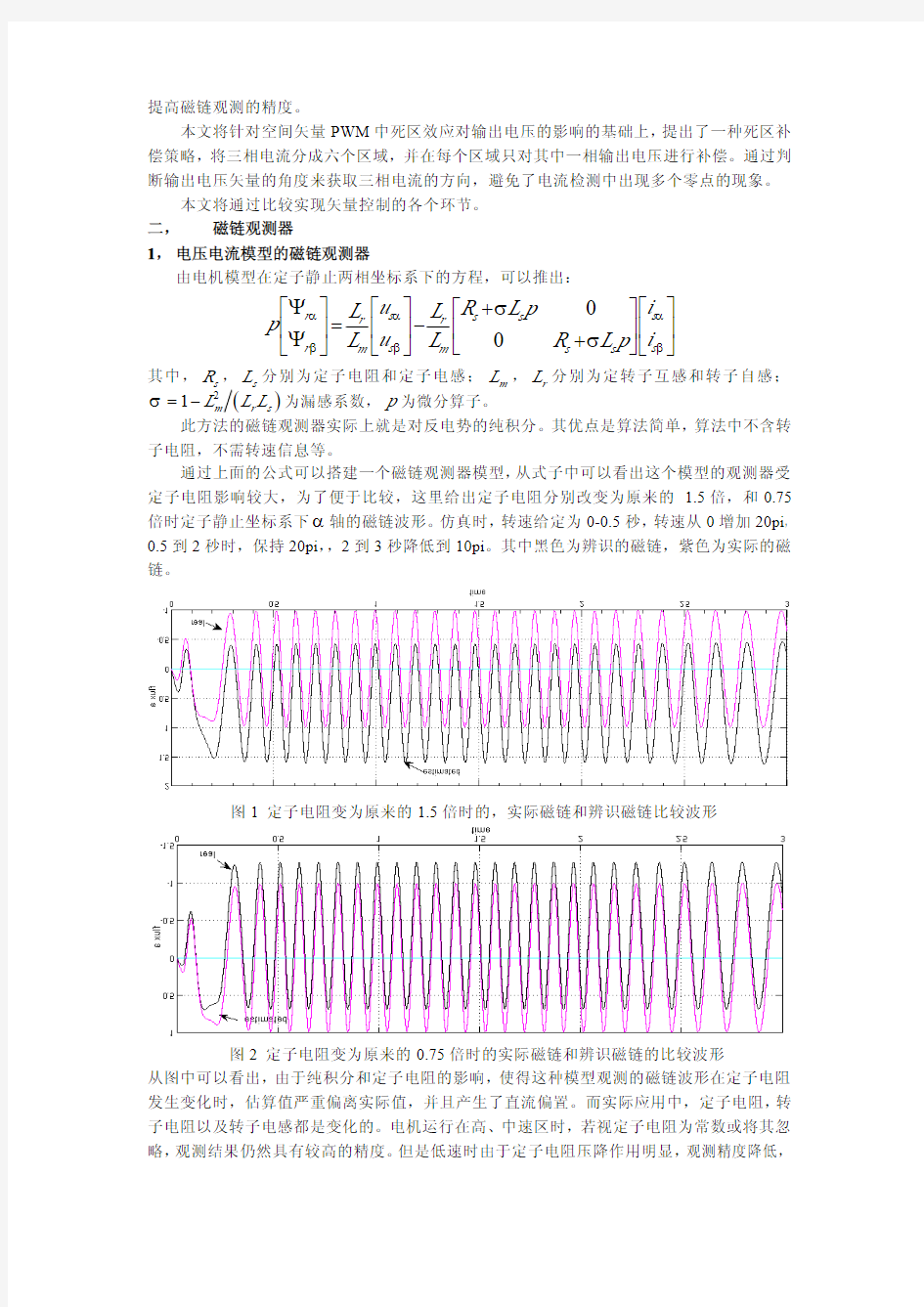
通过上面的公式可以搭建一个磁链观测器模型,从式子中可以看出这个模型的观测器受定子电阻影响较大,为了便于比较,这里给出定子电阻分别改变为原来的1.5倍,和0.75倍时定子静止坐标系下α轴的磁链波形。仿真时,转速给定为0-0.5秒,转速从0增加20pi ,0.5到2秒时,保持20pi ,,2到3秒降低到
10pi 。其中黑色为辨识的磁链,紫色为实际的磁链。
图1定子电阻变为原来的
1.5倍时的,实际磁链和辨识磁链比较波形
图2定子电阻变为原来的0.75倍时的实际磁链和辨识磁链的比较波形
从图中可以看出,由于纯积分和定子电阻的影响,使得这种模型观测的磁链波形在定子电阻发生变化时,估算值严重偏离实际值,并且产生了直流偏置。而实际应用中,定子电阻,转子电阻以及转子电感都是变化的。电机运行在高、中速区时,若视定子电阻为常数或将其忽略,观测结果仍然具有较高的精度。但是低速时由于定子电阻压降作用明显,观测精度降低,
另外由于纯积分环节的误差积累和漂移问题严重,使系统不稳定,因此电压模型法只能在中高速范围内。同时应用积分初始时刻不当,造成输出信号的恒定直流偏移。输入信号本身存在的直流偏移量,将最终导致输出信号的饱和漂移。种种原因限制了直接用电压电流模型进行磁链观测在实际系统中的应用。
2,用低通滤波代替纯积分的电压电流模型法
针对电压电流模型的纯积分影响,有人提出了改进的方法,用一阶低通滤波代替纯积分器。
010r s s s s r r r s s s s c m m u i R L p L L u i R L p s T L L αααβββσσΨ??+????????=?????????????Ψ++?
?????????由上面的方程建立的磁链观测器,虽然可以有效消除积分初始值引起的输出误差,但是对于输入直流偏置,却无能为力。且滤波器的引入又产生新的幅值和相角误差。本文将在本节给出波形。由于一阶低通滤波器的固有缺陷导致在实际的异步电机的矢量控制系统中也不会直接使用这种方法观测磁链。有人基于这种方法由提出了,一种改进的电压电流模型,观测磁链。
3,改进的电压电流模型
针对上面的加入了低通滤波的u i ?模型的磁链观测器存在的缺陷,人们又提出了用滞后环节代替反电势的纯积分项,并且引入转子磁链参考值,其中令滞后环节的时间常数等于转子时常r T ,还可以削弱定子电阻的变化引起的偏差。将低通滤波器串联高通滤波器,并将它们的截止频率设为反电势频率的固定倍数,利用时间相量分析,得到补偿公式,改善积分初值误差问题从而得到改进的电压型转子磁链估算方程:
*1?11r r r r r T e T p T p
Ψ=+Ψ++其中r r r T L R =。为了便于比较,我们对上面仅加入一阶低通滤波环节的磁链观测模型,在取相同时间常数的情况下进行了比较,其中紫色为实际磁链,黑色为改进的u i ?模型观测的磁链,蓝色为上节中的模型观测的磁链。仿真时,转速给定为0-0.5秒,转速从0增加20pi ,0.5到2秒时,线性下降到0.4pi ,,2到3秒升高到10pi
。具体波形如下:
图3两种磁链观测模型的比较
图中,紫色为实际的磁链,蓝色为上节的方法观测的磁链,黑色为本节中改进的u i ?模型模型观测的磁链。从图中可以看出,上节介绍的观测器明显存在着幅值和相位误差,而改进
的u i?模型由于引入了状态校正项,辨识的磁链精度将明显优于上节中的模型观测的磁链。
虽然这种改进的u i?模型磁链观测器,改善了纯积分带来的影响,但是模型固有的缺陷,使得它对于定子电阻缺乏鲁棒性。下面分别给出,定子电阻变为原来的1.5倍,和0.75倍是的静止α轴坐标系下的磁链波形,仿真参数同上:
图4定子电阻变为原来的1.5倍时,改进的电压模型观测的磁链与实际磁链比较
图5定子电阻变为原来的0.75倍时,改进的电压模型观测的磁链和实际磁链的比较
从图4,图5可以看出,由于用滞后环节代替了纯积分环节,改进u i?模型磁链观测器对定子电阻表现出一些鲁棒性,但是影响并未完全消除。与前面两节介绍的u i?模型观测器,改善不少。并且这种方法观测磁链,并未用到转速量,在无速度传感器的FOC控制中,不失为一种有效的磁链观测方法。如果再能辅以定子电阻观测,这种方法的精度,可以近一步提高。
4,基于坐标变换的u i?模型的积分器
有人针对以上一系列u i?模型存在的种种弊端,又提出了这种基于坐标变换的u i?模型的积分器。结构如下:
图6基于坐标变换的u i?模型的结构
从图中可以看出,电路的反馈环节经历了直角坐标系到极坐标系的变换及其反变换,并且对磁链的幅值进行限幅,幅角维持不变,可有效避免了积分输出的波形畸变。
本文搭建了仿真模型进行了仿真研究,仿真时磁链给定为1,转速给定为0-0.5s ,0-20pi rad/s ,0.5s 到2s 为20pi -2pi rad/s ,2s 到3s 维持2pi 不变,为了便于比较,这里分别改变定子电阻为原来的0.75倍和1.5
倍,波形如下:
图61.5
倍定子电阻时观测的磁链波形
图70.75倍定子电阻时观测的磁链波形
从上面两图可以看出,带饱和反馈环节的积分器在两个周期内就能跟踪了实际输出值(具体的时间与截至频率有关),完全消除了低通滤波器引起幅值误差,并抵消了一部分相位误差。但是在定子电阻变小,且转速较低时的性能不尽如人意。性能仍然不及改进的电压模型法。且这种观测器算法比较复杂,再加上辨识精度不高,且仍受定子参数影响。故实际应用中极少采用。
5,电流转速模型的磁链观测器由电机在定子静止两相坐标系下的模型,可推出,另一个基本方程:
11r r s r r m r r s r r r i L p i T T αααβββωωΨΨ??????????=+????????ΨΨ?????????
其中r ω为转子转速,由上面的方程,可以得到i ω?模型的磁链观测器。
基于上面式子的i ω?模型的磁链观测器,结构非常简单,并且不含纯积分环节,与定子电阻无关。但是估算时需要用到转速量,且估算精度受转子时间常数影响很大,而转子时
常是一个很不稳定的系数,随转子温度的变化而变化,尤其当转子频率变化时,由于集肤效应的影响,转子电感和转子电阻的变化朝不同的方向变化。例如,感应电机启动时转子频率较高,转子受集肤效应影响电阻增大而电感变小,因此转子时常较小;感应电机正常运行时转子频率较低,转子电阻为正常值较小而电感却较大,因此转子时常更大。为了作出比较,这里改变转子电阻进行仿真。
仿真时,转速给定为0-0.5秒,转速从0增加20pi ,0.5到2秒时,保持20pi ,,2到3秒升高到4pi 。下面分别给出转子电阻变为原来的1.5倍和0.75倍时,定子静止坐标系下α
轴方向磁链波形:
图8 1.5
倍转子电阻时的磁链波形
图90.75倍转子电阻时的磁链波形
从上面两图可以看出,当转子电阻发生变化时,i ω?模型的磁链观测器,在转子电阻发生改变时,表现出一些误差,但是并不显著。究其原因就是模型中不含纯积分环节,不存在积分漂移等现象,因此不会因为转子电阻的变化,而产生累计误差。因为模型本身实际就是一阶低通滤波环节,因此不存在像u i ?模型中,硬引入一阶低通滤波而引起的相位漂移和幅值削弱得现象。从波形上看,其性能可以与改进的u i ?模型相媲美。
6,电压电流转速综合法设计转子磁链观测器
针对u i ?模型和i ω?模型的磁链观测器各自的优缺点,有人提出了利用两种模型的各自的优点建立综合模型,可减小观测误差,提高磁链观测器的观测精度。可考虑对两种模型观测结果分别用低通与高通滤波器滤波后综合的方法实现:
111r r r c r r r c c ui i T s T s T s αααβββω
ΨΨΨ??????=+??????ΨΨΨ++??????
其中:高通与低通滤波器采用相同的时间常数c T ,是为了u i ?模型和i ω?模型的磁链观测器以相同的转折频率光滑过度。在实际应用中,应根据具体情况,确定c T 的值。本文中取c T 为0.1,并且分别将定子和转子电阻改为原来的0.75倍,和1.5倍,进行仿真比较。仿真时转速给定为0-0.5s 内为0-20pi 线性给定,0.5s -2s 内为20pi -2pi 线性给定,之后维持2pi 不变。为了便于比较,这里将i ω?模型的磁链观测器观测的波形放到一个示波器中。波形
如下:
图10转子和定子电阻均变为原来的0.75
倍时三种波形的比较
图11定转子电阻均变为原来的1.5倍时的三种波形的比较
从上面两图可以看出,这种u ω?模型的观测器,对参数的鲁棒性并没有得到任何改善,并且在低速段观测的磁链甚至敢不上i ω?模型观测的磁链。这可能与所选择的转折频率有一定的关系。在实际应用中,这种转折频率的选取需要大量的实验才能确定。并且这种模型比较复杂,对参数也比较敏感。很少应用于实际的控制系统中。
7,基于转子磁场定向的电流模型观测磁链
转子磁场定向模型中转子磁链由定子电流励磁分量经过一阶惯性环节得到,转差角速度可以由转子磁链与定子电流的转矩分量计算得到,但是定子电流的励磁分量与转矩分量必须由定子三相电流经过转子定向磁场相位角的矢量变换得到,为此需要确定转子定向磁场的位置角。由于对定向磁场转速的积分就是其位置角,而定向磁场的转速等于转子转速与转差角速度之和,所以可以采用如下关系观测转子磁链:
1m rM sM r L i T p
Ψ=+
m s s T r r M
L i T ω=Ψ()0t
Ms r s dt
θωω=+∫其中转子磁链位置角的初始值设为0,这是因为初始状态时转子静止不动,而且确定电压源逆变器的初始开关状态时使得定子绕组A 相加正电压,B 相和C 相都加负电压,这样产生的电流与磁场都与定子A 相绕组轴线重合。
在实际应用中,一般都采用转子磁场定向的矢量控制,而观测定子静止两相坐标系上的转子磁链的作用就是计算转子磁链的位置角,以实现转子磁场定向。那么这里我们只需要知道转子磁链的角度即可,有了转子磁链的角度就可以进行电流解耦了,然后励磁电流分量就可以与磁链发生器给出的磁链进行励磁控制了。因此这种方法非常适合于转子磁场定向矢量控制中磁链的观测。且方法非常简单,可行。是目前普遍采用的观测方法。
在实际应用中,rM Ψ可以用磁链发生器产生的常数代替,这可以使得公式进一步简化。实际就用到上面三式中的下面两个。由上面的方程可以看出,这种方法主要受转子时常的影响,为了便于比较,这里改变转子电阻为原来的0.75倍和1.5倍时,这种磁链观测模型得到
的磁链角的正弦值波形与实际的磁链角正弦值波形的比较:
图120.75
倍转子电阻时,辨识的磁链角度正弦值与实际的比较
图13 1.5倍转子电阻时,辨识的磁链角度正弦值与实际的比较
由于改变了r R ,相当于改变了转子时常,会对辨识的精度造成一些影响。但是与传统的u i ?
模型,以及改进的u i ?模型相比,无论是在辨识算法还是辨识精度上都具有较大优势。再与传统的i ω?模型相比,由于这是一种模型的两种表现形式,因此精度上并未有多大变化,但是算法上简化不少。种种原因使得这种方法在众多方法中脱颖而出,成为目前最为流行的磁链观测器模型。在实际系统中,我们可以通过在线辨识转子电阻或者转子时常来进一步提高,这种算法的精度。
8,闭环的磁链观测器
上面介绍了几种磁链观测器,都是基于开环的观测器。这里再介绍一下,闭环的磁链观测器模型,包括,扩展的Kalman 滤波法,全阶的磁链观测器模型等等。所有的闭环观测器都是基于基本的u i ?模型,i ω?模型公式的推导:
1010101010000010s m m r s
r s r r s r s s s s m r m s s s r s r s r r s r r m r r r r r m r r r R L L L T L L T L L i i L R L L i i u L T L L L L T p L L T T L T T ααββααββωσσσσσσωσσσσσσωω???????????????????????????????????????=+??????Ψ??Ψ????????????ΨΨ?????????????????
????s s u αβ??????10000100s s s s r r i i i i ααββαβ??????????=??????Ψ??????Ψ????
无论是EKF ,还是全阶的磁链观测器模型都是基于上面的式子。有上面的式子构成的EKF 和全阶磁链观测器算法,将会十分复杂。并且这些方法虽然加入校正环节,提高了一些精度,但是模型中都含有大量的电机参数。电机参数的改变都或多或少的对这些观测器产生影响。从实用化,可实现性角度出发,这些闭环的磁链观测器就失去了它们原有的光彩。因此,本系统中并不考虑使用这些复杂的磁链观测器。
综上所述:发现基于闭环的磁链观测器,包括降阶或者全阶,EKF 滤波器法,神经网络法等等的磁链观测器虽然由于引入闭环,使得磁链观测精度提高。但是复杂的算法十分不利于用MCU 实现。且这些方法观测的磁链,也并不是毫无缺陷。它们有些模型对参数敏感,有些模型对噪音敏感,也限制了它们的发展。因此本案,不考虑用这些方法观测磁链。
可以实用化的观测器,这里都进行了仿真研究。从观测精度要求出发基本的u i ?模型,是最差的一种,本案不考虑用这种方法。然后针对基本的u i ?模型的几种改进方法中,又以直接用一阶低通滤波代替纯积分的方法最差,本案也不考虑这种方法。其它两种u i ?模型的改进方法中,本章第三节中的改进的u i ?模型法在辨识精度上要优于本章第四节所提到的方法,且算法也比较简单。因此本章中第三节所介绍的改进的u i ?模型法,是可以考虑的磁链观测方法。
磁链观测的另一个基本方法是i ω?模型。这种模型结构简单,没有纯积分环节。较之u i ?模型的磁链观测器有较大优势。电流模型转子磁链观测器中所使用的输入信号包含转子时间常数,这一参数具有显著的时变特性。当电机运行引起转子温度上升或磁路饱和时转子时间常数的变化范围会较大,常需要对其进行实时辨识才能保证转子磁链观测的精度,但电流模型中不涉及纯积分环节,所以其观测值是渐进收敛的。低速时电流模型的性能优于电压模型,而高速时电压模型的性能优于电流模型。因此本文,也对这两种模型的结合进行了
仿真研究。在仿真时发现,如何选取两个模型的切换点,会直接影响磁链估算的精度。而两种模型切换的频率的选取需要经过大量的实验才能确定,这无疑又要增加调试时的难度。且综合了这两种模型的观测器算法较之其它可实现的算法又会复杂不少。并且仿真时发现,这种模型仍然对参数敏感。因此本案中也不考虑用这种方法。
在本章的第七节,对转子磁场定向下的电流模型也进行了仿真研究。转子磁场定向是目前普遍采用的FOC控制方法,因为只有在转子磁场定向下,电流才可实现完全的解耦。在转子磁场定向的情况下,这种电流模型算法将变得十分的简单,可行。从可实现性上来说,这无疑是最具诱惑力的。从仿真波形看,本文中通过改变转子电阻分别为原来的1.5倍和0.75倍发现,这种方法的辨识精度也足够高,优于改进的u i?模型法。如果再通过其它环节在线辨识转子电阻,或者转子时常,将进一步提高这种模型的磁链观测精度。
综合考虑各种因素,认为基于转子磁场定向的电流模型法为本案磁链观测的首选方案。改进的电压电流模型法为备选方案。
异步电动机转子磁链观测方法的比较与研究 转子磁链、观测方法、比较、矢量控制、直接转矩控制 1 引言 在异步电动机变频调速控制系统中,矢量控制技术和直接转矩控制技术得以有效实现的一个重要基础是在于异步电动机磁链信息的准确获取,这就需要知道磁链的幅值和相位。根据三相异步电动机在两相任意转速旋转坐标系下的数学模型可知,定子、转子和气隙磁链的方程式为: 定子磁链:(1) 转子磁链:(2) 气隙磁链:(3) 从以上方程式不难看出定子、转子和气隙磁链三者只要有一个获得,另外两个就可推导而出。因此异步电动机就有三种与之相对应的磁场定向方法,分别是按定子磁场定向、按转子磁场定向和按气隙磁场定向。不过按定子、气隙磁场定向方法未能实现iM和iT的完全解耦,因此按转子磁场定向是目前主要采用的方法,它可以实现磁通电流分量、转矩电流分量的完全解耦。下面就对转子磁链观测的方法进行一些比较研究,从而为实际应用时选择合适的观测器提供依据。 转子磁链的观测最初是采用直接检测气隙磁链的方法,就是在电机定子内表面装贴霍尔元件或其他磁敏元件,或者在电机槽内埋设探测线圈。利用被测量的气隙磁通,由式(2)、(3)就可得到转子磁通。从理论上讲,该方法应该比较准确,但实际上埋设探测线圈和装贴磁敏元件都会遇到不少工艺和技术上的问题,在一定程度上破坏了电机的机械鲁棒性。同时由于齿槽影响,使检测信号中含有较大的脉动分量,越到低速时越严重。因此在实用的系统中,多采用间接计算的办法,即利用容易测量的电压、电流或转速等信号,借助转子磁链观测模型,实时计算磁链的模值和空间位置。 2 转子磁链的间接获取方法 根据实测信号的不同组合,可以有多种转子磁链观测模型,总的说来可以分为两大类:开环观测模型和闭环观测模型。 2.1 开环观测模型 (1)电流模型法 根据描述磁链与电流关系的磁链方程来计算转子磁链,所得出的模型叫做电流模型,它可以在不同的坐标系下获得。 ● 在两相静止坐标系α-β下转子磁链的电流模型 由实测的三相定子电流经过Clarke变换很容易得到两相静止坐标系上的电流isα和isβ。在两相静止坐标系α-β下的磁链方程: 为:(4) 这里面转子电流是难以测量得到的,需要进一步替换。由式(4)可得
基坑变形监测技术方案 一、工程概况 本工程由一幢门字形酒店、六幢不同高度公寓和整体地下车库组成,总占地面积约30000m 2,总建筑面积约23 万m 2,地下建筑面积约8.7 万m 2。 本工程基坑总面积约29300m 2,东西向长约300~400m,南北方向长约40~110m。基坑总延长线为785m,地下室为三层,基坑开挖深度为-18.2m、-18.7m,管线分布复杂。基坑北侧紧邻海河,南侧是车流量较大的公路,海河水位的变化及张自忠路面动荷载的干扰都将是某基坑监测的难点。基坑监测等级为一级,监测手段众多,监测内容、监测工作量及监测难度均较大。 二、依据及原则 1. 《建筑变形测量规程》(JGJ/T8-97) 2. 《工程测量规范》(GB50026-93) 3. 《建筑基坑支护技术规程》JGJ120-99 4. 《国家一、二等水准测量规范》(GB12897-93) 5. 《天津市建筑地基基础设计规范》(TBJ1-88) 依据规范和天津市建设主管部门对建筑物基坑施工相关文件的要求,以及基坑设计的相关要求;为确保建筑物地下基坑施工及周边环境的安全性和可靠性,使在基坑开挖和施工期间的变形得到有效控制,保证其不对基坑自身及周边环境造成破坏性的影响,用科学的数据指导基坑信息化施工,保证施工安全。
三、基坑监测项目 为了及时收集、反馈和分析周围环境要素在施工中的变形信息,实现信息化施工并确保施工安全,综合本工程周边环境状况及围护结构和支护体系的特点,遵照设计的相关要求,本工程共进行如下几项基坑监测工作: 1、周边环境监测 A、地下管线变形监测; B、基坑外道路变形监测; C、基坑外地下潜水水位监测; D、基坑外承压水水位监测; E、基坑外土体水平位移(测斜)监测; F、基坑外土体表面变形监测; G、海河堤岸变形(沉降、变形)监测; 2、围护结构监测 A、围护桩桩体水平位移(测斜)监测; B、围护桩桩顶变形(沉降、位移)监测; C、围护桩内、外侧水土压力监测; D、围护桩的竖向钢筋应力监测; 3、支撑体系和立柱监测 A、支撑轴力监测; B、钢格构柱及立柱角钢应力监测; C、立柱位移和沉降监测;
编制依据 1.1《工程测量规范》(GB50026——97); 1.2《路桥工程施工手册》; 1.3《公路测绘手册》; 1.4《公路测量》; 1.5《广青公路什邡红白至青牛沱段恢复重建工程二合同段施工图设计》; 1.6《路桥工程验收规范及规程》; 1.7《公路桥涵施工技术规范》(JTG/T F50—2011)
第一章测量总流程图 由于工程规模较大,兼地形、工程结构的复杂,测量工作任务也较大,为保证测量工作的顺利进行。保证工程顺利完工。根据工程需要我们做如下测量操作流程图,(采用全站仪进行测量放样,用DS3型水准仪进行高程控制测量):
第二章工程概况 一、工程概况 本项目路线起点位于什邡市红白镇红东大桥北岸,沿石亭江上游支流金河右岸由南向北经燕子岩、岳家山至干河口,转为北东至南西向,经水磨沟、头坪、二坪、三坪至路线终点青牛沱。本合同段K10+000~K16+240共长6.240km。 该项目起于红东大桥青牛沱岸,止于青牛沱。公路全长16.24公里,为三级公路,设计时速30公里/小时,路基宽度为7.5米,设计荷载公路—Ⅱ级,路面类型为沥青砼。 (第二合同段K10+000~K16+240共长6.240km) 第2合同段共设大桥3座,桥梁全长377.08m/2座;中桥1座,桥梁全长69.04m/2座;小桥2座,桥梁全长47.08m/2座,其中通道桥1座,桥梁全长23.04m/1座。在所经过的沟渠上共设置钢筋砼盖板涵7道,涵洞总长度64.00m,钢筋砼圆管涵16道,涵洞总长度165.50m。 二、校核图纸数据: 施工图纸是测量放样的主要依据,图纸数据校核是第一步,作为测量人员首先应读懂并理解施工图纸的设计意图,才能准确的进行图纸数据校核。其步骤如下: 首先,应该了解图纸的工程概况及技术要求,其次应该读懂图纸总平面设计图,了解工程各部位的平面位置,红线桩位图,周围现状建筑物、公路、桥梁位置,合理有效利用,为今后控制点布设及施工放样创造有利条件。 其次校核内容: 1、阅读图纸所有桩基,桥台,盖帽梁平面图、立面图、剖面图。了解它们的形状、尺寸、构造,特别是轴线尺寸、结构尺寸。 2、校核桥梁桩位坐标与高程,可根据图纸提供的曲线要素(曲线要素也需要检查)逐个检查,对应桩号与高程是否一致,如若发现有误,应该及时上报项目指挥部,由指挥部妥
同步电动机磁链观测器研究 【摘要】详细分析了开环电流模型、电压模型进行磁链观测的方法,针对传统电压模型中存在的纯积分问题提出了改进方法,借助Matlab/Simulink仿真环境搭建仿真平台,仿真验证改善后电压模型引入校正环节k后观测器的稳定性、抗扰动性以及校正系数k的取值对速度阶跃响应的影响,此外对模型具有的抑制积分漂移功能以及改善后电压模型无需对积分器进行初始值设定进行仿真分析,仿真结果验证了改进电压模型的正确性和有效性。 【关键词】交-直-交变频同步电动机电流模型电压模型 1 引言 矿井提升机是矿井人员,物资设备上下井的咽喉设备。保障其安全、可靠、高效地运行是保证矿山安全生产的关键。通过变频器的调速控制,能够实现提升机平稳的恒加速和恒减速过程,并且消除了原来的转子串电阻所造成的能源损耗,具有非常显著的能源节约效应。同时,变频器调速控制系统的电路简单,避免了原来的电阻器、接触器和绕线电机碳刷等元件容易损坏的不足,减少了故障的发生。因此,电压变频器在提升设备速度控制系统中进行应用,具有非常广阔的前景。 作为一门新发展的技术,变频调速被应用于矿山提升机是电力拖动系统必然的发展方向。目前,大功率交流调速应用领域,交-直-交变频同步电动机调速技术已得到了广泛应用,其控制系统多采用矢量控制系统。矢量控制技术能够有效发挥作用的前提是,要能准确的捕获到电动机的磁链信息。因为无论是要进行磁场的定向控制,还是要进行磁链的闭环控制,都必须要时刻清楚的掌握磁链的位置与大小。因此,很有必要对磁链的检测方法进行研究。 磁链的检测方法在工程上主要分为直接检测法和间接检测法。要实现磁链的直接检测,在工艺与技术上都存在较多的问题,所以现在主要使用间接检测法。间接检测的方法具体为,首先测得电动机的定子电压、转速或电流等容易检测的信息,然后利用已建立的电机数学模型,通过计算得出磁通匝的幅值与空间位置角。间接检测法中又包括开环和闭环检测。虽然闭环检测具有更好的性能,但其结构较为复杂。而开环检测方法的结构比较简单,通过适当改进能够满足要求,所以更实用一些。 本文主要进行了开环观测模型的研究,详细分析了开环电流模型、电压模型以及改进的电压模型进行磁链观测的方法,并通过Matlab/Simulink仿真平台搭建仿真模型进行仿真研究,仿真结果验证了改进后的电压模型的正确性和有效性。 2 开环观测模型
转子磁链观测 检测转子磁链的目的是:(1)生成单位矢量,进行直接矢量控制;(2)进行磁链的闭环控制或补偿控制,使磁链的控制更加精确。直接检测气隙磁链必须在制造电机时预先在某相绕组平面内间隔90 ?电角度埋入两个磁通传感器,对使用者很不方便。而采用电机以外的其他传感器间接检测磁链,即采用磁链观测器观测磁链则增加了使用电机的主动性,所以受到人们的重视[2,5]。 电流模型转子磁链观测器是通过检测定子电流和转子旋转速度而计算出转子磁链的一种观测方法。计算公式如下所示: 21222 2 12221()11()1m m i T L T p i T L T p ααβββαψωψψωψ? =-?+?? ?=+?+? (2-14) 电流模型观测器的优点是在整个速度范围内均可以对转子磁链进行观测,但 观测的精度与转子绕组参数的测量(或计算)的准确程度关系很大,而且存在随温度变化和集肤效应随频率的变化,这对精确地观测磁链带来困难。 电压模型转子磁通观测器是通过检测异步电动机定子电压和定子电流而计算出转子磁通的一种观测方法,实现方法如图2-7所示。以下公式给出了在两相静止坐标系下转子磁通的计算公式。 ()()()() 2 111 1122111 11 2m m L dt u i i R L L L dt u i i R L L ααααββββσψσψ? =--??? ?=--?? ?? (2-15) 电压模型转子磁链观测器易于实现,因为只需要电压互感器和电流互感器,电路简单,但电压模型磁链观测器一步只能在额定转速的10%以上使用,因为在10%以下的转速范围内,电机的定子电压变得很小,真实值被积分误差和检测误差所淹没,难以保证精度。因此,通常在高速段采用电压模型观测器,而在低速段才使用电流模型观测器。 图2-7电压模型磁链观测器 电压型转子磁链观测器由于使用了纯积分环节,存在直流偏差和初始值问题,为了克服这些问题,在积分环节后串连一个一阶高通滤波器,写出表达式如下:
固定污染源烟气排放连续监测系统 技术方案 目录 前言 (1) 第一章系统简介 (2) 一、系统概述 (2) 二、规范性引用文件 (2) 三、认证许可 (3) 四、运行环境 (3) 第二章系统组成与描述 (4) 一、采样探头 (5) 二、烟气伴热管 (5) 三、预处理系统 (5) 四、SO2、NOx测量单元 (6) 五、氧含量测量单元 (8) 六、粉尘测量单元 (8) 七、温压流测量单元 (10) 八、数据采集及处理系统 (11) 第三章系统安装 (16) 一、系统安装要求 (16) 二、系统得安装 (20) 第四章供货清单 (23)
第五章技术支持与服务 (24) 第六章附表 (25)
前言 欢迎您使用我公司固定污染源烟气排放连续监测系统,固定污染源烟气排放连续监测系统英文名称“Continuous Emission Monitoring System”,简称“CEMS”。本方案中包含了系统详细介绍、操作指南以及相关说明。为了您能方便及充分地了解与使用系统得功能,敬请仔细阅读。 ●该系统必须由熟悉该设备结构与操作及明确潜在危险得熟练电气维护人员 进行安装、调试与维修。 ●所有操作必须严格按此手册执行,否则有可能会损坏设备,甚至会导致人身 伤害。 ●为最大限度得减少安全隐患,应遵守与该系统安装、调试、操作相关得地方 与国家性得规范。 ●未经授权请勿擅自对系统进行改装或组装。若因擅自改装或组装引发得事故, 本公司概不承担法律责任。 ●产品得外观或规格会因产品改进而进行变更。恕不另行通知,敬请谅解。 ●本产品说明书中得图示仅仅用作说明,可能与实际使用时有差异。 ●该手册基于本公司产品介绍,请用户根据自己所购产品提取有效信息。 ●阅读之后,请保存在实际使用该系统得人员随时可查阅之处。 第一章系统简介 一、系统概述 我公司固定污染源烟气排放连续监测系统能对企业废气排放口得SO 2、NO X 、 颗粒物(粉尘)、烟气温度、烟气压力、流速、烟气含氧量等数据自动采集、分析与储存,实现自动、实时、准确地监控监测企业废气排放情况与治理设施得运行状态,既便于企业环保管理层了解与掌握污染治理与废气排放得整体情况,也利于环保主管部门得监控与管理,为实现节能减排、总量控制提供切实有效得监管手段。 该系统气态污染物监测采用抽取式冷干法,其原理就是由德国进口采样泵通过采样探头抽取样气,采样探头具备除尘、加热、恒温控制等功能,样气被引导至预处理系统,去除颗粒物、水分、腐蚀性气体等,再由控制系统对样气进行切换,
工程施工测量管理实施细则 第一章总则 目的和意义 施工测量工作是工程建设的重要环节,是技术管理工作的重要组成部分,为进一步加 强施工测量管理工作,明确测量工作的任务和职责,确保测量工作及时地、精确地满足施 工生产的需要,特制定本细则。 施工测量是工程开工前、工序作业前、项目竣工前技术准备工作的重要环节,又是对 已完工的工程实体位置、高程、几何尺寸检测及位移变形观测的重要手段。它既是工程建 设施工阶段的重要技术基础工作,又为施工和运营安全提供必要的资料和技术依据。总体 要求 为保证工程测量成果的准确性和及时性,必须建立完善的工作制度,合理组织测量人员,配置相应的仪器设备,严格按照设计及工程测量规范的要求进行测量,在满足测量精 度的基础上积极为施工生产服务,确保工程进度、质量和安全。 原则 在测量布局上,应遵循“由整体到布局”的原则;在测量精度上,应遵循“由高级到低级” 的原则;在测量次序上应遵循“先控制后碎步”的原则;在测量过程中应遵循“随时检查, 杜绝错误”,“前一步工作未作检核不进行下一步工作”的原则。 施工测量的依据 施工测量以工程合同、设计文件(含变更设计)、设计单位提供的控制桩资料、工 程所属行业测量技术规范(规则)为依据。 施工测量的三个阶段 施工测量工作分三个阶段,即开工准备阶段测量、施工阶段测量和竣工阶段测量。开工准 备阶段测量包括:交接桩、设计控制桩贯通复测、施工控制网建立、地形地貌复核测量。 施工阶段测量包括:施工放样测量、工序检查测量、施工控制网复测、沉降位移变形观测 及安全监控测量。竣工阶段测量包括:竣工贯通测量和工点竣工测量。 设计控制桩交接 参加由建设单位组织的设计、监理和施工单位参加的现场交接桩工作,根据设计院提供的 资料,对设计平面控制桩和高程控制桩等逐一进行现场确认接收,做好交接记录,办理交 接桩签认手续。交接记录应详细注明缺桩和桩损情况及存在问题和处理意见。接桩后及时 清理桩址周围杂物,建立醒目的桩位标志,并进行必要的保护。 设计控制桩贯通复测 根据设计控制桩的精度等级要求,编制平面、高程控制点施工复测方案, 控制点加密测量方案,经监理工程师批准后,对设计平面控制桩及高程控制桩进行贯通复测,对丢失或损坏的控 制桩点进行补设(或由设计补设),并与相临标段的设计控制桩进行联测(不少于两个桩点),当复测成果与设计不相符时,应及时与设计沟通解决。完成后编制复测成果报告书,经监理、设计签字确认后使用。 施工控制网建立 在熟悉本标段设计路线和结构工程平面图的基础上,根据施工测量的需要,确定在设计控 制网点的基础上进行加密或重新布设测量控制网点,相邻加密桩点保证通视且间距不宜超 过300m。测量完成后编制施工控制网测量成果报告书,经监理复核确认批准后方可用于 施工放线测量。 地形地貌复核测量
文章编号:1009-3486(2002)05-0019-03 异步电机矢量控制中转子磁链的直接观测方法 Ξ 王铁军,单潮龙,赵镜红,张俊洪 (海军工程大学电气工程系,湖北武汉430033) 摘 要:以异步电机的等效电路为模型提出了在电机的外部构造转子磁链物理观测器的方法.理论上证明了在选取合适参数之后,用该物理观测器可以直接得到感应电机转子磁链的大小与相位,该方法用于异步电机的矢量控制系统,具有很好的实时性,且避免复杂的数字运算.关键词:感应电动机;矢量控制;转子磁链观测中图分类号: TM346.2 文献标识码: A 图1 U V W 、αβ、dq 坐标系与电流矢量 在异步电动机的调速技术中,转子磁链的定向矢量控制代表着该领域中新的技术理论.转子磁链定向的基本思想是:将U V W 坐标系变换到α β坐标系,再由αβ坐标系变换到d q 坐标系[1] ,当选择的d 轴与转子的全磁链Ψ? 2重合时,称该坐标系为 M T 坐标系.此时,代表定子磁动势的空间矢量电流i 1被分解为M 轴方向的励磁分量i m 1和T 轴方向的转矩分量i t 1,图1表示3种坐标系与矢量电流.可以证明[2],异步电动机的电磁转矩为: T =n p L m L r Ψ2i t 1 (1) 而转子磁链为: Ψ2= L m 1+T 2p i m 1 (2) 式中:n p 为电机磁极对数;L m 为定转子间互感;L r 为转子电感;T 2=L r /R 2为转子时间常数;p 为微分 算子.从(1)、 (2)式中不难看出,通过合适的坐标变换可以实现与直流电动机类似的速度控制过程.为了进行磁场定向和坐标变换,以及对控制系统中的指令电量和检测电量作运算处理,需要确定转子磁链的图2 磁链观测器原理框图 瞬时空间位置和大小.Ψ? 2的观测有多种方法[1~4].随着微处理器技术的发展,目前多采用间接观测的方法,即检测定子的电压、电流或转速等物理量,再利用转子磁链的数学模型,实时计算转子磁链的幅值和相位.图2为根据定子电流和定子电压的检测值估算转子磁链的原理框图,图中:u u ,v ,w 、i u ,v ,w 分别为来自电压检测器、电流检测器 的异步电动机定子三相电路的电压、电流信号.(3)、 (4)两式为磁链观测器的内部运算关系. Ψα2=L r L m [∫(u α1-R 1i α1)d t -L s σi α1](3)Ψβ2= L r L m [∫ (u β1 -R 1i β1)d t -L s σi β1] (4) 第14卷 第5期 2002年10月 海军工程大学学报 JOURNAL OF NAVAL UN IV ERSIT Y OF EN GIN EERIN G Vol.14 No.5 Oct.2002 Ξ收稿日期:2002203222;修订日期:2002204218 作者简介:王铁军(19652),男,讲师,硕士.
1.1在线安全监测 1.1.1网站安全监测背景 当前,互联网在我国政治、经济、文化以及社会生活中发挥着愈来愈重要的作用,作为国家关键基础设施和新的生产、生活工具,互联网的发展极大地促进了信息流通和共享,提高了社会生产效率和人民生活水平,促进了经济社会的发展。 网络安全形势日益严峻,针对我国互联网基础设施和金融、证券、交通、能源、海关、税务、工业、科技等重点行业的联网信息系统的探测、渗透和攻击逐渐增多。基础网络防护能力提升,但安全隐患不容忽视;政府网站篡改类安全事件影响巨大;以用户信息泄露为代表的与网民利益密切相关的事件,引起了公众对网络安全的广泛关注;遭受境外的网络攻击持续增多;网上银行面临的钓鱼威胁愈演愈烈;工业控制系统安全事件呈现增长态势;手机恶意程序现多发态势;木马和僵尸网络活动越发猖獗;应用软件漏洞呈现迅猛增长趋势;DDoS攻击仍然呈现频率高、规模大和转嫁攻击的特点。 1.1.2网站安全监测服务介绍 1.1. 2.1基本信息安全分析 对网站基本信息进行扫描评估,如网站使用的WEB发布系统版本,使用的BBS、CMS版本;检测网站是否备案等备案信息;另外判断目标网站使用的应用系统是否存在已公开的安全漏洞,是否有调试信息泄露等安全隐患等。 1.1. 2.2网站可用性及平稳度监测 拒绝服务、域名劫持等是网站可用性面临的重要威胁;远程监测的方式对拒绝服务的检测,可用性指通过PING、HTTP等判断网站的响应速度,然后经分析用以进一步判断网站是否被拒绝服务攻击等。 域名安全方面,可以判断域名解析速度检测,即DNS请求解析目标网站域
名成功解析IP的速度。 1.1. 2.3网站挂马监测功能 挂马攻击是指攻击者在已经获得控制权的网站的网页中嵌入恶意代码(通常是通过IFrame、Script引用来实现),当用户访问该网页时,嵌入的恶意代码利用浏览器本身的漏洞、第三方ActiveX漏洞或者其它插件(如Flash、PDF插件等)漏洞,在用户不知情的情况下下载并执行恶意木马。 网站被挂马不仅严重影响到了网站的公众信誉度,还可能对访问该网站的用户计算机造成很大的破坏。一般情况下,攻击者挂马的目的只有一个:利益。如果用户访问被挂网站时,用户计算机就有可能被植入病毒,这些病毒会偷盗各类账号密码,如网银账户、游戏账号、邮箱账号、QQ及MSN账号等。植入的病毒还可能破坏用户的本地数据,从而给用户带来巨大的损失,甚至让用户计算机沦为僵尸网络中的一员。 1.1. 2.4网站敏感内容及防篡改监测 基于远程Hash技术,实时对重点网站的页面真实度进行监测,判断页面是否存在敏感内容或遭到篡改,并根据相应规则进行报警 1.1. 2.5网站安全漏洞监测 Web时代的互联网应用不断扩展,在方便了互联网用户的同时也打开了罪恶之门。在地下产业巨大的经济利益驱动之下,网站挂马形势越来越严峻。2008年全球知名反恶意软件组织StopBadware的研究报告显示,全球有10%的站点都存在恶意链接或被挂马。一旦一个网站被挂马,将会很快使得浏览该网站用户计算机中毒,导致客户敏感信息被窃取,反过来使得网站失去用户的信任,从而丧失用户;同时当前主流安全工具、浏览器、搜索引擎等都开展了封杀挂马网站行动,一旦网站出现挂马,将会失去90%以上用户。 网站挂马的根本原因,绝大多数是由于网站存在SQL注入漏洞和跨站脚本漏洞导致。尤其是随着自动化挂马工具的发展,这些工具会自动大面积扫描互联
宜春步步高广场基坑及周围建筑物 监测技术方案 编制: 审核: 批准: 宜春四通测绘勘测有限公司 2011年06月09日
目录 第一章工程概况 (2) 第二章监测方案编写依据 (2) 第三章监测内容 (3) 第四章监测点的布设 (3) 第五章监测方法、精度、选用仪器及数据处理方法 (4) 第六章监测频率和观测次数 (9) 第七章控制标准与险情预报 (11) 第八章信息反馈与监测成果 (12) 第九章监测工作的组织机构 (12) 第十章监测工作质量保证措施 (13) 第十一章岗位责任制及监测工作管理制度 (14)
宜春步步高广场基坑及周围建筑物 监测技术方案 第一章工程概况 宜春步步高广场拟建建筑由主楼、裙楼和地下室组成,地下室3层,深度约13米,地下室南北长约140米,东西宽约100米,面积约14000m2,地上建筑由2栋主楼(紧邻沿河路,单栋平面尺寸约20×45m,层数28层,建筑高约90米)和多层裙楼(层数7层,建筑高约34米)组成; 位于袁河南岸,紧邻沿河路,周围为繁华的商业街,其北面为沿河路,东面为东风路,南面为中山路,西面为重桂路,各路段管线密布,交通繁忙,周边建筑物分布详见监测点平面布置图。 场地基坑北侧11米处为沿河路,宽约7米,上下班车流量拥挤;东侧8米为东风路与秀江大桥,属于市内交通要道,距基坑红线东边36米处,东北角为3栋6层居民楼,之间为6层新华书店(基础形式不详),东南角为11层青龙大厦,属桩基基础;南侧10米为中山路,属于市内交通要道,距基坑红线25米处,为12层商业建筑,属桩基基础;西侧5米为重桂路,宽约9米,车流量较少,但距基坑红线西边约14米处,为一排5栋2-6层居民楼,年代较老,基础类型属于条形基础,埋深约2米,西北角为1栋4层建筑(基础形式不详)和2栋6层居民楼,属桩基基础。 第二章监测方案编写依据 本监测方案主要依据以下几种规范和文件编写:
异步电机矢量控制方案论证 一,概述 三相异步电机具有结构简单,牢固,维修方便,价格便宜等特点,目前在工业领域中得到广泛应用。早期的变频调速采用变压变频(VVVF)速度开环的方式,基频以下为恒压频比控制,在低速时,提高电压以补偿定子阻抗压降。这种调速方法的控制结构简单,成本低,适用于风机等对调速系统动态特性要求不高的场合,但是对于动态和静态性能要求高的场合,这种开环系统就无法提供足够的保障。 1971年德国西门子公司的F.Blashke等革命性地提出了“感应电机磁场定向控制原理(Fieldorientation)”,即矢量控制技术,使交流传动的转矩静动态特性取得质的改善,完全可与直流调速系统相媲美。矢量控制的实质是利用美国A.A.Clark提出的“感应电机定子电压的坐标变换控制”原理。经过不断的实践和改进,形成了现已得到普遍应用的矢量控制变频调速技术。矢量控制通过引入坐标变换,把复杂的异步电机等效为简单的模型,在保证磁场准确定向的情况下,可以实现励磁电流和转矩电流的解耦,使得交流电机的转矩控制性能可以与直流电机相比拟,这无疑是交流传动控制理论上的一个质的飞跃。 转子磁场的定向控制就是在将旋转坐标系放在同步旋转磁场上,将电机的转子磁通作为旋转坐标系的直轴。若忽略由反电动势引起的交叉耦合,检测出定子电流的直轴分量,就可以观测转子磁通幅值,但转子磁通恒定电磁转矩与定子电流的交轴分量成正比,通过控制定子电流的交轴分量就实现对电磁转矩的控制,此时称定子电流的直轴分量为励磁分量,定子电交轴分量为转矩分量。可由电压方程的直轴分量控制转子磁通,交轴分量控制转矩从而实现磁通和转矩的解耦控制。转子磁场定向的最大的优点是达到了完全解耦,无需增加解耦器,控制方式简单,具有良好的动态性能和控制精度。 在异步电机矢量控制中,要实现准确的解耦,必须要知道转子磁链准确的相位角。而在直接矢量控制中,为了实现磁链的反馈控制,还要知道转子磁链准确的幅值。通过异步电机定子侧电压、电流,以及转子转速等电机运行参数,通过实时计算得到转子磁链的准确位置和大小,这种技术就是磁链观测器,在矢量控制中,常用的转子磁链观测器有电压模型和电流模型两种。以及基于这两种模型的若干种改进的算法。本文将论述磁链观测器的实现方法以及优缺点比较。 同时在高性能的异步电机矢量控制系统中,转速信息的获取是必不可少的。电机速度信息的辨识方法,分为直接法和间接法。直接法就是通过电子式或机电式速度传感器,如霍尔效应器件(HALL)、光学编码器、旋转变压器等,以及处理电路、处理软件等来获取电机速度信息。间接法就是通过测量电机的定子电流、定子电压等信号,根据电机的模型间接估计辨识电机的转速信息。然而由于速度传感器的安装给系统带来了一些缺陷。同时在一些应用场合并不能安装测速原件,而在感应电机速度闭环控制中需要电机转速信息,一些矢量控制策略中也需要知道电机转速。在理论上通过感应电机的电压和电流可以实时计算出电机的转速的理论,从而可以不需要速度传感器实现磁场定向控制和速度闭环控制,即无速度传感器控制。从高精度及可实用化的角度出发,闭环的转速估算方法中的PI自适应控制器法和模型参考自适应系统法(MRAS)法较容易实现。本文将着重对各种MRAS方法的转速辨识进行比较。 电机的参数辨识主要包括电机起动前的离线辨识和在线辨识两个方面,前者是指在控制系统设计初期,通过一系列的实验得到需要得到异步电动机的定、转子电阻,定、转子之间的互感,定、转子漏感,转动惯量等参数。在异步电机矢量控制中,定子电阻和转子时间常数(主要是转子电阻)等电机参数是磁链观测和转速辨识的依据。而它们随电机温度和工况变化的变化量可以达到原值的0.75到1.5倍,因此电机参数的在线动态辨识尤为重要,如果不及时补偿,会带来估计误差并进而使得系统性能恶化。本文将论述,如何辨识转子电阻以
测量实施方案编制的主要内容与要求 一、编制依据 施工组织设计,相关规范、规程 二、工程概况 按表列出工程名称、施工地点、施工范围、开竣工时间、主要参建单位、设计结构形式、主要设计参数三、施工前的测量工作准备 1技术准备 技术员、测量员要熟悉施工图纸,掌握图纸设计意图,结合图纸会审记录,掌握图纸设计分项工程的各部位的详细几何尺寸、标高、高程及细部结构情况。道路渠化段长度、渐变段长度。道路平曲线(缓和曲线)、竖曲线的设计参数。 2、人员配置及工作安排 3、仪器设备 根据工程特点质量要求按表列出用于本工程仪器设备的名称、规格、数量、检验标定情况 4、控制点的复核及临时导线点、水准点的增设 以下为从类似工程测量方案中部分摘抄,此部分编制应结合本工程特点 1 进场后经过监理测量工程师交桩,接桩后立即组织测量人员对控制桩点进行复 测,如符合要求即向监理工程师申请批准使用,否则重新交桩。 2、在控制桩点经监理工程师批准使用后,根据工程现场情况,在道路沿线进行 控制点的加密。加密的控制点要进行保护,防止碰撞或破坏。 3、施工测量执行《工程测量规范》,在施工现场沿线布设三级导线闭合控制网, 四等水准高程控制网,导线点间距控制在200m左右,方法采用符合法。绘制草图上报监理 工程师,桩点用水泥混凝土加固保护。 为保证测量精度,仪器测出的数据必须加改正值,重要部位的点位、高程测量必须做平差处 理,角度取到0.T,高程取到mm位。钢尺量距必须有三差改正,控制精度由高至低传递。 减少误差消灭错误,测量工作从外业到内业必须做到步步有效核。 四、各分项工程测量工作的实施方法、步骤及控制措施 应按本工程项目划分分别论述 以下为从类似工程测量方案中部分摘抄,此部分编制应结合本工程特点 4.1道路施工测量 依据测绘局测量工程师交桩和各标桩控制网点测出崔家窑西路、崔家窑中路、崔家窑 南街、次渠水南庄北街、水南庄北一街公路的永中线、公路外边线、红线。并钉好控制桩, 用混凝土做好固定保护,增加维护设施。 4.2电力沟工程测量 沟槽开挖的测量 根据施工组织设计要求,按先深后浅的原则,以各路段的槽底最深分项工程进行开挖。 有路段先施工电力沟,有路段先施工污水管线。
项目基坑工程监测 技 术 方 案 XXXXXX设计有限公司二○一一年八月
项目基坑工程监测方案 编写: 审核: 批准: XXXXXXX勘察设计有限公司 08月 目录
1监测技术方案 ........................................................... 错误!未定义书签。 1.1 工程概况错误!未定义书签。 1.2 周边环境概况错误!未定义书签。 1.3 监测目的错误!未定义书签。 1.4 监测技术方案编制依据与原则错误!未定义书签。 1.4.1 监测技术方案编制依据......................... 错误!未定义书签。 1.4.2 监测技术方案编制的原则..................... 错误!未定义书签。 1.5 监测范围及内容错误!未定义书签。 1.6.监测方法、数据处理及测点的埋设错误!未定义书签。 1.6.1 监测控制网的布设................................. 错误!未定义书签。 1.6.2 围护墙顶沉降监测................................. 错误!未定义书签。 1.6.3 围护墙顶水平位移监测......................... 错误!未定义书签。 1.6.4 围护墙深层水平位移监测..................... 错误!未定义书签。 1.6.5 支撑轴力监测 ......................................... 错误!未定义书签。 1.6.6 立柱沉降监测 ......................................... 错误!未定义书签。 1.6.7地下水位监测.......................................... 错误!未定义书签。 1.6.8边建筑物沉降、裂缝、倾斜监测 ...... 错误!未定义书签。 1.6.9周边管线水平、垂直位移监测 ............ 错误!未定义书签。 1.6.10巡视........................................................ 错误!未定义书签。 1.7监测技术要求错误!未定义书签。 1.7.1 技术要求 ................................................. 错误!未定义书签。 1.7.2 监测精度 ................................................. 错误!未定义书签。
目录 第一章编制根据 (2) 第二章工程概况 (2) 第三章项目测量工作的重要性 (3) 第四章测量程序 (3) 第一节本工程施工测设的特点 (4) 第二节施工测量的准备 (4) 第三节工程定位 (5) 第四节平面控制网测设 (5) 第五节高程控制网的布设 (7) 第五章基础测量 (7) 第六章主体结构施工测量 (8) 第一节平面控制网的测设 (8) 第二节垂直度控制 (9) 第三节标高控制: (9) 第四节标高传递注意事项 (9) 第七章工程重要部位的测量控制方法 (9) 第一节建筑物大角垂直度的控制 (9) 第二节墙、柱施工精度测量控制方法 (10) 第三节电梯井施工测量控制方法 (10) 第八章竣工测量与变形观测 (10) 第一节建筑物自身的沉降观测 (10) 第九章测量复核措施及资料的整理 (12) 第十章施工测量工作的组织与管理 (12) 第一节主要仪器的配备情况 (12) 第二节施工测量管理人员组成 (13) 第三节仪器保养和使用制度 (13) 第四节测量管理制度 (14)
第一章编制根据 1、规划局和建设单位提供的坐标控制点和水准控制点; 2、本工程设计施工图; 3、《工程测量规范》(GB50026-2007); 4、《建筑变形测量规范》(JGJ8—2007 ) 5、《建筑地基基础工程施工质量验收规范》(GB50202-2002) 6、《混凝土结构工程施工质量验收规范》(GB50204-2011) 7、《工程测量基本术语标准(GB/T50228-96)》 第二章工程概况 1、 XXXX工程,位于XXXX地。 本工程由4栋小高层、2栋多层和一层地下车库组成,总建筑面积共约35138.1m2,其中14#楼9层(-1+9+1F)建筑面积为8585.8 m2,15#、22#和24#楼11层(-1+11+1F)建筑面积均为3763.6㎡,23#楼5层(-1+5+1F)建筑面积为2278.7 m2,24#楼5层(-1+5+1F)建筑面积为3436.0㎡。最大建筑物高度15#、22#、24#楼均为36.35m。基础形式均为独立基础加墙下条基,结构形式为框—剪结构和框架结构。一层地下车库及一层商业用房建均为一体独栋建筑面积9546.8 m2。地下车库为框剪结构、外围为钢筋混凝土剪力墙。本地区抗震设防烈度为6度。 2、本工程各栋楼标高
曹妃甸工业区西港路管线工程 基坑监测 施工方案 编制 复核 审核 中交一公局第三工程有限公司 曹妃甸工业区西港路管线工程项目部 2016年4月2日
1、工程概况 施工现场紧邻已修完的道路和一个厂房(唐山鑫联环保科技有限公司),基坑开挖深度2.9米~9.7米。 基坑支护体系:基坑支护采用双排拉森IV钢板桩支护,钢板桩根据基坑深度采用9米和12米长钢板桩,围檩采用双拼40工字钢,支撑采用Φ529mm钢管。 基坑止水、排水体系:基坑止水采用钢板桩止水,基坑底部沿周边设置排水沟与集水井进行集水明排。 2、监测方案 2.1 监测设计依据 1.《建筑基坑工程监测技术规范》(GB50497-2009) 2.《建筑基坑支护技术规程》(JGJ120-99) 3.《工程测量规范》(GB50026-2007) 4.《国家一、二等水准测量规范》(GB12897-2006) 5.《建筑变形测量规范》(JGJ8-2007) 6.《建筑边坡工程技术规范》(GB50330-2002) 7.《城市测量规范》(CJJ8-99) 8.《全球定位系统城市测量技术规程》(CJJ73-97) 9.《建筑地基基础工程施工质量验收规范》(GB50202-2002) 2.2 监测项目 监测内容设置取决于工程本身的规模、施工方法、地质条件、环境条件等,本着
经济、合理、有效的原则,根据设计要求并结合本工程特点,确定本工程的监测对象为:基坑支护结构。 依据本工程基坑支护设计方案确定本基坑工程的监测内容和项目如下: 1)钢板桩顶水平位移 2)钢板桩顶沉降 3)周边建筑物和既有道路沉降观测 4)支撑变形观测 5)裂缝监测 2.3 钢板桩水平位移监测 基坑开挖过程中,由于基坑受外部压力的影响,钢板桩会产生水平位移,因此在钢板桩顶上设置水平位移观测点。 测点布置:沿两侧钢板桩顶均匀布设位移监测点,喷红漆编号做标记,监测点间距约5米。 监测仪器:使用全站仪或者GPS;坡顶水平位移监测点布置图见附图。 2.4 钢板桩垂直位移监测 钢板桩顶沉降是基坑基本监测项目,它最直接地反映支护结构外围的土体变形情况。 测点布置:点位借用钢板桩顶水平位移监测点,在每次观测时将监测点顶端部作为高程测点。 监测仪器:使用水准仪1台,其精度为每公里中误差为±0.3mm,最小显示0.01mm,观测点精度不低于1mm; 监测方法:待点位稳固后,根据边坡开始施工后进行第一次观测。 2.5 周边建筑物及道路沉降观测 周边建筑物及道路沉降观测是基坑监测的最基本的项目,以防止基坑开挖过程中
电气传动2015年第45卷第8期 基于全阶状态滑模观测器的异步电机 转子磁链观测 杨淑英,王伟,谢震,张兴 (合肥工业大学电气与自动化工程学院,安徽合肥230009) 摘要:矢量控制的关键在于转子磁链定向。针对异步电机矢量控制中磁链观测问题,设计了一种基于全阶状态滑模观测器的增强型转子磁链观测方案。该方案将全阶磁链观测器和滑模观测器结合起来对异步电机定子电流和转子磁链同时进行实时跟踪观测,从而获得较为准确的转子磁链观测,进而提高矢量控制时磁场定向的准确性以及矢量控制的性能。研究表明该方案不仅算法简单,而且具有较强的参数鲁棒性以及较好的稳定性。仿真结果证明了该方案的分析和设计。 关键词:全阶状态滑模观测器;转子磁链观测;矢量控制;异步电机中图分类号:TM921 文献标识码:A Induction Motor Rotor Flux Observation Based on Full Order State Observing Involved Sliding Mode Observer YANG Shu?ying ,WANG Wei ,XIE Zhen ,ZHANG Xing (School of Electrical Engineering and Automation ,Hefei University of Technology , Hefei 230009,Anhui ,China ) Abstract:Rotor flux orientation is crucial to the strategy of vector control for induction motor.An enhanced rotor flux observation method based on full order state observing involved sliding mode observer (FOSOSMO )for induction motor was designed to address the rotor flux observing issue of the vector control.The normal full?order flux observer was combined with the sliding mode observer to make the stator currents and rotor fluxes observed simultaneously.Therefore ,by the combination design ,an improved rotor flux observation was realized ,and the accuracy of the rotor?flux orientation and further the performance of the driving system were also advanced ,consequently.Studies show that the observing scheme not only is convenient to engineering implementation ,but also has strong parameter robustness and satisfactory stability.Simulation results validate the analysis and design.Key words:full order state observing involved sliding mode observer ;rotor flux observer ;vector control ; induction motor 作者简介:杨淑英(1980-),男,博士,副教授,Email :yangsyhfah@https://www.doczj.com/doc/be15530627.html, ELECTRIC DRIVE 2015Vol.45No.8 异步电机的低成本、高可靠性,使其在新能源领域有着广泛的应用。随着新能源应用的迅速发展,对异步电机控制的要求也越来越高。矢量控制,尤其是转子磁场定向矢量控制是当前应用广泛且经典的一种异步电机驱动控制策略。而转子磁链获取的准确性直接影响到异步电机磁场定向的准确性,影响到异步电机矢量控制系统的动态性能[1-2]。 由于异步电机转子磁链的直接测量十分困 难,通常需要通过间接观测计算获得。根据所用电机模型的不同,有两种较为典型的转子磁链观测计算方法,即电流模型法和电压模型法[1]。其中,电流模型法受电机参数影响较大,一般仅用于低速阶段;而电压模型法,因其存在积分运算问题,一般用于中高速运行阶段[3]。为了克服直接电压或电流模型法存在不足以获得更好的转子磁链定向效果,基于全阶观测器的转子磁链观 测方案是近年来广为关注的研究热点问题。文 3 网络出版时间:2015-08-24 10:28:26 网络出版地址:https://www.doczj.com/doc/be15530627.html,/kcms/detail/12.1067.TP.20150824.1028.002.html