昆明理工大学信息工程与自动化学院学生实验报告(2012 —2013 学年第一学期)
课程名称:数据结构开课实验室:信自楼445 2012 年12月20日
目的要求
1.掌握图的存储思想及其存储实现。
2.掌握图的深度、广度优先遍历算法思想及其程序实现。
3.掌握图的常见应用算法的思想及其程序实现。
实验内容
1.键盘输入数据,建立一个有向图的邻接表。
2.输出该邻接表。
3.在有向图的邻接表的基础上计算各顶点的度,并输出。
4.以有向图的邻接表为基础实现输出它的拓扑排序序列。
5.采用邻接表存储实现无向图的深度优先递归遍历。
6.采用邻接表存储实现无向图的广度优先遍历。
7.在主函数中设计一个简单的菜单,分别调试上述算法。
运行结果截图:
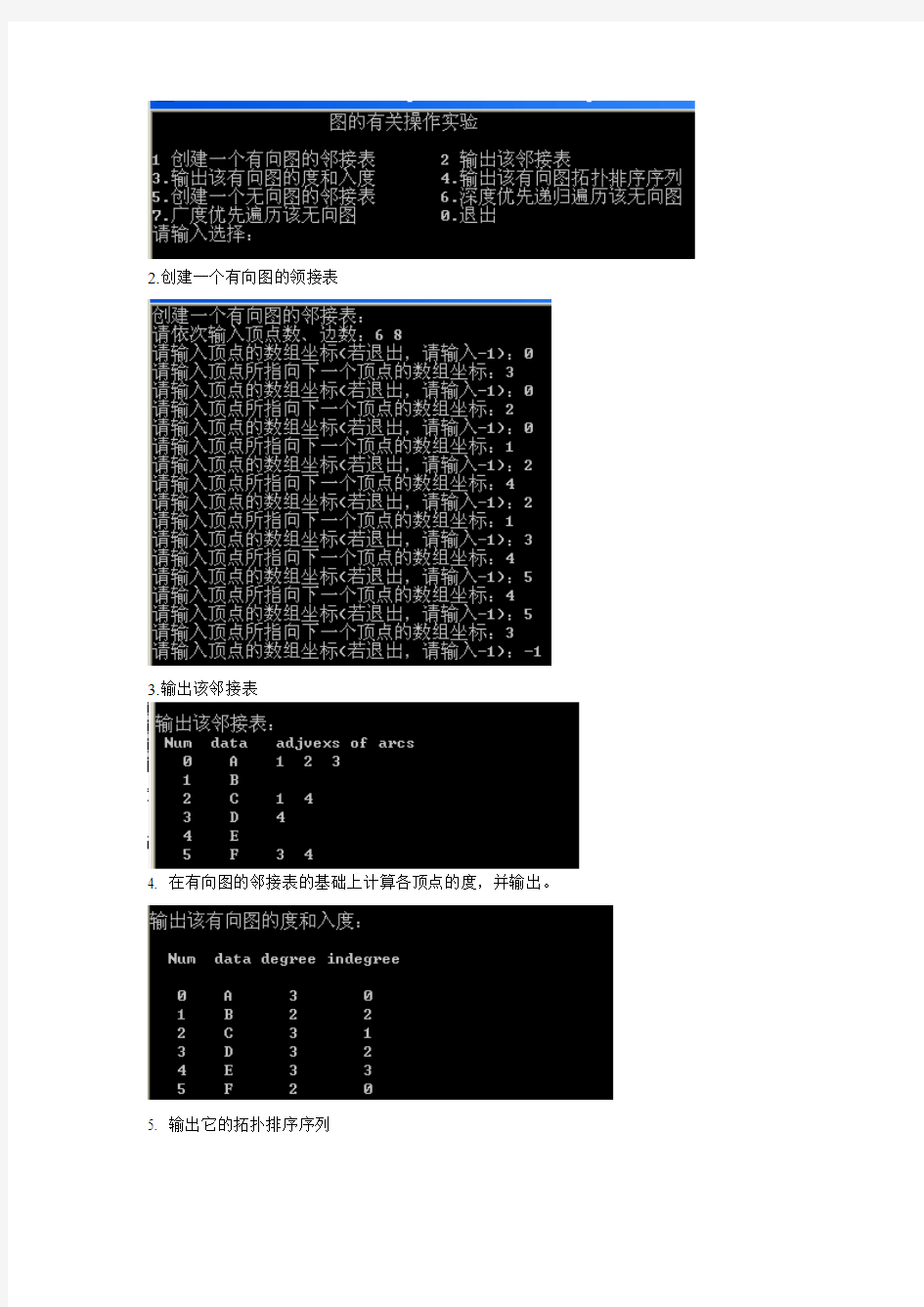
1.主菜单界面:
2.创建一个有向图的领接表
3.输出该邻接表
4. 在有向图的邻接表的基础上计算各顶点的度,并输出。
5. 输出它的拓扑排序序列
6. 输出所建无向图的邻接表
7. 深度优先递归遍历该无向图
8. 广度优先遍历该无向图
实验总结
本实验中图的遍历采用邻接表的存储结构,在输入图的信息时,首先要画出图的邻接表信息。图有两种遍历的形式,一种为深度优先搜索,另一种为广度优先搜索。在此次实验中,基本完成了图的操作,实现了建立有向图的邻接表,无向图的邻接表以及对它们的深度优先、广度优先遍历。也学到了很多关于图的知识和算法。
数据结构与算法 课程设计报告 课程设计题目:图的算法实现专业班级:信息与计算科学1001班姓名:学号: 设计室号:理学院机房 设计时间: 2011-12-26 批阅时间:指导教师:成绩:
图的算法实现 目录 一.设计内容 二.功能设计流程 三.详细设计 四.调试 五.总结 六.参考文献 七.附录源代码
一、设计内容: 1.实验内容 图的算法实现 (1)将图的信息建立文件; (2)从文件读入图的信息,建立邻接矩阵和邻接表; (3)实现Prim、Kruskal、Dijkstra序算法。 2.实现的任务:从文件中读入图的信息,建立图的邻接矩阵和邻接表,实现Prim、Kruskal、Dijkstra 3.本系统涉及的知识点 Prim、Kruskal、Dijkstra、邻接矩阵和邻接表存储。 4.功能要求 1.不同的功能使用不同的函数实现(模块化),对每个函数的功能和调用接口要注释清楚。对程序其它部分也进行必要的注释。 2.对系统进行功能模块分析、画出总流程图和各模块流程图。 3.用户接口要求使用方便、简洁明了、美观大方、格式统一。 4.通过命令行相应选项能直接进入某个相应菜单选项的功能模块。 5.所有程序需调试通过。 二、功能设计流程: 图的算法 实现 邻接矩阵邻接表 Prim算法Kruskal算法Dijkstra算法
开始 辅助数组初始 输出生成树的边并计算其权值 新顶点并入U 集后重新选择最小边:遍历点,若g.edges[k][j]!=0 && g.edges[k][j] 本文主要介绍基于Retinex理论的雾霭天气图像增强及其实现。并通过编写两个程序来实现图像的去雾功能。 1 Rentinex理论 Retinex(视网膜“Retina”和大脑皮层“Cortex”的缩写)理论是一种建立在科学实验和科学分析基础上的基于人类视觉系统(Human Visual System)的图像增强理论。该算法的基本原理模型最早是由Edwin Land(埃德温?兰德)于1971年提出的一种被称为的色彩的理论,并在颜色恒常性的基础上提出的一种图像增强方法。Retinex 理论的基本内容是物体的颜色是由物体对长波(红)、中波(绿)和短波(蓝)光线的反射能力决定的,而不是由反射光强度的绝对值决定的;物体的色彩不受光照非均性的影响,具有一致性,即Retinex理论是以色感一致性(颜色恒常性)为基础的。 根据Edwin Land提出的理论,一幅给定的图像S(x,y)分解成两幅不同的图像:反射物体图像R(x,y)和入射光图像L(x,y),其原理示意图如图8.3-1所示。 图-1 Retinex理论示意图 对于观察图像S中的每个点(x,y),用公式可以表示为: S(x,y)=R(x,y)×L(x,y) (1.3.1)实际上,Retinex理论就是通过图像S来得到物体的反射性质R,也就是去除了入射光L的性质从而得到物体原本该有的样子。 2 基于Retinex理论的图像增强的基本步骤 步骤一: 利用取对数的方法将照射光分量和反射光分量分离,即: S'(x, y)=r(x, y)+l(x, y)=log(R(x, y))+log(L(x, y)); 步骤二:用高斯模板对原图像做卷积,即相当于对原图像做低通滤波,得到低通滤波后的图像D(x,y),F(x, y)表示高斯滤波函数: D(x, y)=S(x, y) *F(x, y); 步骤三:在对数域中,用原图像减去低通滤波后的图像,得到高频增强的图像G (x, y): G(x,y)=S'(x, y)-log(D(x, y)) ; 任务书 1、课程设计目的: 1)提高分析问题、解决问题的能力,进一步巩固数字图像处理系统中的基本原理与方法。 2)熟悉掌握一门计算机语言,可以进行数字图像应用处理的开发设计。 2、课程设计的题目:运动模糊图像复原算法实现及应用 1)创建一个仿真运动模糊PSF来模糊一幅图像(图像选择原理)。 2)针对退化设计出复原滤波器,对退化图像进行复原(复原的方法自定)。 3)对退化图像进行复原,显示复原前后图像,对复原结果进行分析,并评价复原算法。 3、课程设计方案制定: 1)程序运行环境是Windows 平台。 2)开发工具选用matlab、VC++、VB、C#等,建议选用matlab作为编程开发工具,可以达到事半功倍的效果、并降低编程难度。 3)以组件化的思想构建整个软件系统,具体的功能模块根据选定的不同题目做合理的划分。 4、课程设计的一般步骤: 1)选题与搜集资料:选择课题,进行系统调查,搜集资料。 2)分析与设计:根据搜集的资料,进行功能分析,并对系统功能与模块划分等设计。 3)程序设计:掌握的语言,编写程序,实现所设计的功能。 4)调试与测试:自行调试程序,同学之间交叉测试程序,并记录测试情况。 5)验收与评分:指导教师对每个成员开发对的程序进行综合验收,综合设计报告,根据课程设计成绩的判定方法,评出成绩。 5、要求 1)理解各种图像处理方法确切意义。 2)独立进行方案的制定,系统结构设计合理。 3)程序开发时,则必须清楚主要实现函数的目的和作用,需要在程序书写时做适当的注释。 目录 摘要 (2) 一、概述 (3) 1.1选题背景 (3) 1.2课程设计目的 (4) 1.3设计内容 (5) 二、图像退化与复原 (6) 2.1图像退化与复原的定义 (6) 2.2图像退化模型 (7) 2.3运动模糊图像复原的方法 (7) 2.3.1逆滤波复原法 (8) 2.3.2维纳滤波的原理 (9) 三、运动模糊图象复原的matlab实现 (10) 3.1维纳滤波复原 (10) 3.2约束最小二乘滤波复原 (10) 3.3 运动模糊图像复原实例 (11) 四、课程设计总结与体会 (14) 图像拼接算法及实现(一) 来源:中国论文下载中心 [ 09-06-03 16:36:00 ] 作者:陈挺编辑:studa090420 论文关键词:图像拼接图像配准图像融合全景图 论文摘要:图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。图像拼接在摄影测量学、计算机视觉、遥感图像处理、医学图像分析、计算机图形学等领域有着广泛的应用价值。一般来说,图像拼接的过程由图像获取,图像配准,图像合成三步骤组成,其中图像配准是整个图像拼接的基础。本文研究了两种图像配准算法:基于特征和基于变换域的图像配准算法。在基于特征的配准算法的基础上,提出一种稳健的基于特征点的配准算法。首先改进Harris角点检测算法,有效提高所提取特征点的速度和精度。然后利用相似测度NCC(normalized cross correlation——归一化互相关),通过用双向最大相关系数匹配的方法提取出初始特征点对,用随机采样法RANSAC(Random Sample Consensus)剔除伪特征点对,实现特征点对的精确匹配。最后用正确的特征点匹配对实现图像的配准。本文提出的算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。 Abstract:Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other, and finally builds a seamless and high quality image which has high resolution and big eyeshot. Image mosaic has widely applications in the fields of photogrammetry, computer vision, remote sensing image processing, medical image analysis, computer graphic and so on. 。In general, the process of image mosaic by the image acquisition, image registration, image synthesis of three steps, one of image registration are the basis of the entire image mosaic. In this paper, two image registration algorithm: Based on the characteristics and transform domain-based image registration algorithm. In feature-based registration algorithm based on a robust feature-based registration algorithm points. First of all, to improve the Harris corner detection algorithm, effectively improve the extraction of feature points of the speed and accuracy. And the use of a similar measure of NCC (normalized cross correlation - Normalized cross-correlation), through the largest correlation coefficient with two-way matching to extract the feature points out the initial right, using random sampling method RANSAC (Random Sample Consensus) excluding pseudo-feature points right, feature points on the implementation of the exact match. Finally with the correct feature point matching for image registration implementation. In this paper, the algorithm adapted, in the repetitive texture, such as relatively large rotation more difficult to automatically match occasions can still achieve an accurate image registration. Key words: image mosaic, image registration, image fusion, panorama 第一章绪论 目录 1.3 图像噪声 一幅图像在获取和传输等过程中,会受到各种各样噪声的干扰,其主要来源有三:一为在光电、电磁转换过程中引入的人为噪声;二为大气层电(磁)暴、闪电、电压、浪涌等引起的强脉冲性冲激噪声的干扰;三为自然起伏性噪声,由物理量的不连续性或粒子性所引起,这类噪声又可分成热噪声、散粒噪声等。一般在图像处理技术中常见的噪声有:加性噪声、乘性噪声、量化噪声、“盐和胡椒”噪声等。下面介绍两种主要的噪声。 1、高斯噪声 这种噪声主要来源于电子电路噪声和低照明度或高温 带来的传感器噪声,也称为正态噪声,是在实践中经常用到的噪声模型。高斯随机变量z 的概率密度函数(P D F )由下式给出: }2/)(ex p{2/1)(22σμσπ--=z z p 其中, z 表示图像像元的灰度值;μ表示z 的期望;σ表示z 的标准差。 2、椒盐噪声 主要来源于成像过程中的短暂停留和数据传输中产生 的错误。其P D F 为: ?????===其他0)(b z pb a z pa z p 如果b > a , 灰度值b 在图像中显示为一亮点,a 值显 示为一暗点。如果P a和图像均不为零,在图像上的表现类似于随机分布图像上的胡椒和盐粉微粒,因此称为椒盐噪声。当P a为零时,表现为“盐”噪声;当P b为零时,表现为“胡椒”噪声。 图像中的噪声往往是和信号交织在一起的尤其是乘性 噪声,如果平滑不当,就会使图像本身的细节如边缘轮廓‘线条等模糊不清,从而使图像质量降低。 第二章、图像平滑方法 2.1 空域低通滤波 将空间域模板用于图像处理,通常称为空间滤波,而空间域模板称为空间滤波器。空间域滤波按线性和非线性特点有:线性、非线性平滑波器。 线性平滑滤波器包括领域平均法(均值滤波器),非线 性平滑滤波器有中值滤波器。 2.1.1 均值滤波器 对一些图像进行线性滤波可以去除图像中某些类型的噪声,如采用邻域平均法的均值滤波器就非常适用于去除通过扫描得到的图像中的颗粒噪声。邻域平均法是空间域平滑技术。这种方法的基本思想是,在图像空间,假定有一副N ×N 个像素的原始图像f (x ,y ),用领域内几个像素的平均值去代替图像中的每一个像素点值的操作。经过平滑处理后得到一副图像 g (x ,y ), 其表达式如下: ∑∈=s n m n m f M y x g ),(),(/1),( 式中: x ,y =0,1,2,…,N -1;s 为(x ,y )点领域中点的坐标的集合,但不包括(x ,y )点;M 为集合内坐标点的总数。 领域平均法有力地抑制了噪声,但随着领域的增大,图像的模糊程度也愈加严重。为了尽可能地减少模糊失真,也可采用阈值法减少由于领域平均而产生的模糊效应。其公式如下: ?????>-=∑∑∈∈其他),(),(/1),(),(/1),(),(),(y x f T n m f M y x f n m f M y x g s n m s n m 式中:T 为规定的非负阈值。 形态学运算:基本思想是具用一定结构形状的结构元素去度量和提取图像中的对应形状以达到对图像分析和识别的目的。 腐蚀运算:将结构元素中心遍历整个图像,当图像完全包含结构元素时的中心点的轨迹即为腐蚀后的图像,图像变细。腐蚀运算可用于滤波,选择适当大小和形状的结构元素,可以滤除掉所有不能完全包含结构元素的噪声点。当然利用腐蚀滤除噪声有一个缺点,即在去除噪声的同时,对图像中前景物体形状也会有影响,但当我们只关心物体的位置或者个数时,则影响不大。 膨胀运算:将结构元素中心遍历整个图像边缘,中心点的轨迹即为腐蚀后的图像,图像整体变粗。通常用于将图像原本断裂开来的同一物体桥接起来,对图像进行二值化之后,很容易是一个连通的物体断裂为两个部分,而这会给后续的图像分析造成干扰,此时就可借助膨胀桥接断裂的缝隙。 开运算:先腐蚀后膨胀,可以使图像的轮廓变得光滑,还能使狭窄的连接断开和消除细毛刺;但与腐蚀运算不同的是,图像大的轮廓并没有发生整体的收缩,物体位置也没有发生任何变化。可以去除比结构元素更小的明亮细节,同时保持所有灰度级和较大亮区特性相对不变,可用于补偿不均匀的背景亮度。与腐蚀运算相比,开运算在过滤噪声的同时,并没有对物体的形状轮廓造成明显的影响,但是如果我们只关心物体的位置或者个数时,物体形状的改变不会给我们带来困扰,此时腐蚀滤波具有处理速度上的优势。 闭运算:先膨胀后腐蚀,可以去除比结构元素更小的暗色细节。开闭运算经常组合起来平滑图像并去除噪声。可使轮廓变的平滑,它通常能弥合狭窄的间断,填补小的孔洞。腐蚀运算刚好和开运算相反,膨胀运算刚好和闭运算相反,开闭运算也是对偶的,然而与腐蚀、膨胀不同的是,对于某图像多次应用开或闭运算的效果相同。 击中击不中运算:先由结构元素腐蚀原图像,再将结构元素取反去腐蚀原图像的取反图,最后将两幅处理后的图像取交。主要用于图像中某些特定形状的精确定位。 顶帽变换:原图像减去开运算以后的图像。当图像的背景颜色不均匀时,使用阈值二值化会造成目标轮廓的边缘缺失,此时可用开运算(结构元素小于目标轮廓)对整个图像背景进行合理估计,再用原图像减去开运算以后的图像就会是整个图像的灰度均匀,二值化后的图像不会有缺失。 Sobel算子: Prewitt算子: LOG算子: Canny算子:力图在抗噪声干扰和精确定位之间尊求折中方案,主要步骤如下所示: 1、用高斯滤波器平滑图像; 2、用一阶偏导的有限差分来计算梯度的幅值和方向; 3、对梯度幅值进行非极大值抑制; 4、用双阈值算法检测和连接边缘。 Hough变换: 边缘检测: 数据结构课程设计报告 设计题目:图的算法实现 班级: 学号: 姓名: 数据结构课程设计报告内容 一.课程设计题目 图的算法实现 【基本要求】 (1)建立一文件,将图的信息存在此文件中; (2)从此文件读入图的信息,建立邻接矩阵和邻接表; (3)实现Prim、Kruskal、Dijkstra和拓扑排序算法。 二.算法设计思想 (1)图的存储结构: 邻接矩阵:用两个数组分别存储数据元素(顶点)的信息和数据元素之间的关系(边或弧)的信息。 邻接表:对图中的每个顶点建立一个单链表,第i个单链表中的结点表示依附于顶点Vi的边(对有向图是以顶点Vi为尾的弧)。每个结点由3个域组成,其中邻接点域指示与顶点Vi邻接的点在图中的位置,链域指示下一条边或弧的结点;数据域存储和边或弧相关的信息。每个链表上附设一个表头结点。在表头结点中,除了设有链域指向链表中第一个结点之外,还设有存储顶点Vi的名或其他相关信息的数据域。 (2)prim算法 是一种求图的最小生成树的算法。 假设N=(V,{E})是连通网,TE是N上最小生成树中边的集合。算法从U={u0}(u0∈V)、TE={}开始。重复执行下列操作:在所有u∈U,v∈V-U的边(u,v)∈E中找一条权值最小的边(u0,v0)并入集合TE中,同时v0并入U,直到V=U为止。此时,TE中必有n-1条边,T=(V,TE)为G 的最小生成树。Prim算法的核心:始终保持TE中的边集构成一棵生成树。 (3)Kruskal算法 Kruskal算法是另一种求最小生成树的算法 他的基本思想是以边为主导地位,始终选择当前可用(所选的边不 能构成回路)的最小权植边。所以Kruskal算法的第一步是给所有的边按照从小到大的顺序排序。 具体实现过程如下: <1> 设一个有n个顶点的连通网络为G(V,E),最初先构造一个只有n个顶点,没有边的非连通图T={V,空},图中每个顶点自成一格连通分量。 <2> 在E中选择一条具有最小权植的边时,若该边的两个顶点落在不同的连通分量上,则将此边加入到T中;否则,即这条边的两个顶点落到同一连通分量上,则将此边舍去(此后永不选用这条边),重新选择一条权植最小的边。 <3> 如此重复下去,直到所有顶点在同一连通分量上为止。 (4)Dijkstar算法 Dijkstra算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径。 它的主要特点是以起始点为中心向外层层扩展直到扩展到终点为止。 基本思想 通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s 开始计算)。 此外,引进两个集合S和U。S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。 初始时,S中只有起点s;U中是除s之外的顶点,并且U中顶点的路径是”起点s到该顶点的路径”。然后,从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。然后,再从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。…重复该操作,直到遍历完所有顶点。 操作步骤 <1>初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为”起点s到该顶点的距离”[例如,U中顶点v的距离为(s,v)的长 3. 要求对于邻接矩阵和邻接链表给出从G 到T G 的算法,并计算其复杂度。 对于邻接矩阵问题十分简单,直接求矩阵的转置即可,意味着把行换成列,把列换成行,对每行操作为O(|V|),需要对|V|行操作,时间复杂度为O (|V|^2)。 对于邻接链表,很明显要遍历链表的所有结点来看:如果对于u 结点其指向的结点中有v,则在新的链表中,创建一条从v 的链表指向u 的路径,因此需要遍历所有的链表元素,因此时间复杂度为O (|V|+|E|)。 3. 给出一个多图(多图为包含重复边和自循环边的图)去除冗余边的复杂度为O(V+E)的算法。 遍历邻接链表的所有结点,对于结点u ,如果其链表中还有u ,则去除所有的u ;如果还有重复的v ,则去除除了第一个v 以外的v 结点(这里的标记方法有很多种,可以用个数组)。这样的复杂度应该在O(V+E)。 4. 求解平方图的问题 算法如下:遍历G 的邻接矩阵,对于结点u ,如果存在u 到v 的路径,则在G^2的邻接矩阵u 中加入v,然后再遍历v 结点的链表,如果存在v 到w ,则将w 也加入到G^2的邻接矩阵u 中。 时间复杂度:这样,再遍历u 的时候,如果遍历到了u →v 这条边,那就在看v 的链表,而v 的链表里最多有|V|个结点,因此总的复杂度为O (|V|+|V|·|E|)。 6. 邻接矩阵求通用汇点(入度为|V|-1但是出度为0)的算法 算法如下:从(1,1)开始扫描邻接矩阵,如果(i,j )是0,则下一个扫描(i,j+1);如果(i ,j )是1,则下一个扫描(i+1,j ),当i 或者j 任一方到达|V|时停止。 这样,在最坏的情况下,扫描一行加一列或者一列加一行的结点,一共有2*|V|-1时间复杂度,因此为O(V)。 7. 关联矩阵,说明BB^T 每个元素是什么意思。 其中bij = -1 (如果边j 从结点i 发出) 1(如果边j 进入i 结点) 0(其他) 此处需要分类讨论:要明白B^T 中i 行相当于B 中第i 列。 ①BB^T 对角线上的元素,T B B (i ,i ) = ∑=| E |1 j 2 bij ,这样如果存在一条由i 发出或者进 入i 的边,都会在T B B (i ,i )中加一(因为就算是-1平方之后也是1),因此T B B (i ,i )就是代表由多少条边从i 发出或者进入。 ②BB^T 非对角线元素,T B B (i ,j ) = ∑=| |1 k E jk ik b b ,由公式或者读者自己画矩阵图可以 得出,如果k 边从i 发出从j 进入,或者反过来,bik*bjk 就等于-1,否则就为0。原因是i,j 我国基本比例尺地形图分幅与编号的计算方法 韩丽蓉 (青海大学水电系,青海西宁 810016) 摘要:通过实例探讨了我国基本比例尺地形图分幅与编号的计算方法,此方法可以帮助使用者快速地由某点的经纬度值计算出高斯投影带带号和某比例尺地形图的图幅编号,在测绘工作中具有一定的实用性。 关键词:分幅;编号;六度带;中央子午线经度 中图分类号:K 99 文献标识码:B 文章编号:1006-8996(2006)06-0079-04 1 高斯分带投影 1.1 基本概念 在地理坐标中,经度是以经过英国格林威治天文台的子午面作为起算点(零度),自西向东逆时针至180°为东经,自东向西顺时针从0°至180°为西经,东、西经180°经线是重合的。地图投影是把不可展的 地球椭球体面上的经纬网,按照一定的数学法则转绘到平面上[1,2]。我国的8种国家基本比例尺地形图 (1:1000000~1:5000)中,除了1:1000000万地形图采用国际通用的正轴等角割圆锥投影外,其余7种国家基本比例尺地形图统一采用高斯投影。 高斯投影中限制长度变形的最有效方法是按一定经差将地球椭球面划分成若干投影带,通常投影分为六度带和三度带。分带时既要控制长度变形使其不大于测图误差,又要使带数不致过多以减少换带计算工作。我国1:500000~1:25000的比例尺地形图多采用六度带高斯投影,1:10000~1:5000的地形图采用三度带高斯投影。我国基本比例尺地形图的分幅与编号需要用到某地所在的1:1000000 地形图(经差6° )的中央子午线经度,故需计算该六度带的带号及中央子午线经度。1.2 投影带带号和中央子午线经度的计算方法 1.2.1 六度带 从格林威治零度经线起,每隔经差6°分为一个投影带,自西向东逆时针分带,全球依次编号为1,2, 3,……60,每带中间的子午线称为中央子午线[1,2]。 东半球从经度0°逆时针回算到东、西经180°,投影带号为1~30。假如知道东半球某地区的平均大地经度L 东,则其投影带带号M 东和中央子午线经度L 6东的计算公式为: M 东=[L 东Π6](取整数商)+1(有余数时);L 6东=(6M 东-3)° (东经)西半球投影带从东、西经180°逆时针回算到0°,投影带号为31~60,假如知道西半球某地区的平均大地经度L 西,则其投影带带号M 西和中央子午线经度L 6西的计算公式为: M 西=[(360°-L 西)Π6](取整数商)+1(有余数时)=[(180°-L 西)Π6](取整数商)+1(有余数时)+30;L 6西={360°-(6M 西-3)°}(西经) 1.2.2 三度带 自东经115°子午线起,每隔经差3°自西向东分带,依次编号为1,2,3,……120[1,2] 。 东半球有60个投影带,编号为1~60,假如知道东半球某地区的平均大地经度L 东,其投影带带号N 东和中央子午线经度L 3东的计算公式为: 收稿日期:2006-07-10 作者简介:韩丽蓉(1967—),女,撒拉族,青海循化人,副教授,硕士。第24卷 第6期2006年12月 青海大学学报(自然科学版)Journal of Qinghai University (Nature Science ) Vol 124No 16Dec 12006 数据结构课程设计报告 图的最短路径算法的实现 班级:计算机112班 姓名:李志龙 指导教师:郑剑 成绩:_______________ 信息工程学院 2013 年1 月11 日 目录 一、题目描述 -------------------------------------------------------------------- 1 1.1题目内容-------------------------------------------------------------------- 1 2.2题目要求-------------------------------------------------------------------- 1 二、设计概要 -------------------------------------------------------------------- 2 2.1程序的主要功能----------------------------------------------------------- 2 2.2数据结构-------------------------------------------------------------------- 2 2.3算法分析-------------------------------------------------------------------- 2 三、设计图示 -------------------------------------------------------------------- 4 四、详细设计 -------------------------------------------------------------------- 5 五、调试分析 -------------------------------------------------------------------- 8 六、运行结果 -------------------------------------------------------------------- 9 七、心得体会 ------------------------------------------------------------------- 11参考资料 ------------------------------------------------------------------------ 12 一、图的邻接矩阵存储 1.存储表示 #define vexnum 10 typedef struct{ vextype vexs[vexnum]; int arcs[vexnum][vexnum]; }mgraph; 2.建立无向图的邻接矩阵算法 void creat(mgraph *g, int e){ for(i=0;i for(i=0;i 基本数字图像处理算法的matlab实现 1.数字图像处理的简单介绍 所谓数字图像就是把传统图像的画面分割成为像素的小的离散点,各像素的灰度值也是用离散值来表示的。 数字图像处理是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。 2.图像的显示与运算 2.1图像的显示 Matlab显示语句 imshow(I,[lowhigh])%图像正常显示 I为要显示的图像矩阵。,[lowhigh]为指定显示灰度图像的灰度范围。高于high的像素被显示成白色;低于low的像素被显示成黑色;介于high和low之间的像素被按比例拉伸后显示为各种等级的灰色。 subplot(m,n,p) 打开一个有m行n列图像位置的窗口,并将焦点位于第p个位置上。 2.2图像的运算 灰度化将彩色图像转化成为灰度图像的过程成为图像的灰度化处理。彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的灰度化处理可用两种方法来实现。 第一种方法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。 第二种方法是根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。 灰度是灰度级的函数,它表示图象中具有每种灰度级的象素的个数,反映图象中每种灰度出现的频率。 图像增强的目标是改进图片的质量,例如增加对比度,去掉模糊和噪声,修正几何畸变等;图像复原是在假定已知模糊或噪声的模型时,试图估计原图像的一种技术。 Matlab图像格式转换语句 rgb2gray(I) %从RGB图创建灰度图 imhist(I) %画灰度直方图 图像的线性变换 D B=f(D A)=f A*D A+f B Matlab源代码: I1=imread('F:\图片2.jpg'); subplot(2,2,1);imshow(I1);title('原图'); I2=rgb2gray(I1); %灰度化图像 subplot(2,2,2);imshow(I2);title('灰度化后图'); [M,N]=size(I2); subplot(2,2,3) [counts,x]=imhist(I2,60); %画灰度直方图 counts=counts/M/N; stem(x,counts);title('灰度直方图'); g=zeros(M,N);%图像增强 目录 摘要 (1) 引言 (2) 第一章绪论 (3) 1.1 课程设计选题的背景及意义 (3) 1.2 图像边缘检测的发展现状 (4) 第二章边缘检测的基本原理 (5) 2.1 基于一阶导数的边缘检测 (8) 2.2 基于二阶导的边缘检测 (9) 第三章边缘检测算子 (10) 3.1 Canny算子 (10) 3.2 Roberts梯度算子 (11) 3.3 Prewitt算子 (12) 3.4 Sobel算子 (13) 3.5 Log算子 (14) 第四章MATLAB简介 (15) 4.1 基本功能 (15) 4.2 应用领域 (16) 第五章编程和调试 (17) 5.1 edge函数 (17) 5.2 边缘检测的编程实现 (17) 第六章总结与体会 (20) 参考文献 (21) 摘要 边缘是图像最基本的特征,包含图像中用于识别的有用信息,边缘检测是数字图像处理中基础而又重要的内容。该课程设计具体考察了5种经典常用的边缘检测算子,并运用Matlab进行图像处理结果比较。梯度算子简单有效,LOG 算法和Canny 边缘检测器能产生较细的边缘。 边缘检测的目的是标识数字图像中灰度变化明显的点,而导函数正好能反映图像灰度变化的显著程度,因而许多方法利用导数来检测边缘。在分析其算法思想和流程的基础上,利用MATLAB对这5种算法进行了仿真实验,分析了各自的性能和算法特点,比较边缘检测效果并给出了各自的适用范围。 关键词:边缘检测;图像处理;MATLAB仿真 引言 边缘检测在图像处理系统中占有重要的作用,其效果直接影响着后续图像处理效果的好坏。许多数字图像处理直接或间接地依靠边缘检测算法的性能,并且在模式识别、机器人视觉、图像分割、特征提取、图像压缩等方面都把边缘检测作为最基本的工具。但实际图像中的边缘往往是各种类型的边缘以及它们模糊化后结果的组合,并且在实际图像中存在着不同程度的噪声,各种类型的图像边缘检测算法不断涌现。早在1965 年就有人提出边缘检测算子,边缘检测的传统方法包括Kirsch,Prewitt,Sobel,Roberts,Robins,Mar-Hildreth 边缘检测方法以及Laplacian-Gaussian(LOG)算子方法和Canny 最优算子方法等。 本设计主要讨论其中5种边缘检测算法。在图像处理的过程需要大量的计算工作,我们利用MATLAB各种丰富的工具箱以及其强大的计算功能可以更加方便有效的完成图像边缘的检测。并对这些方法进行比较 图像二值化算法研究与实现 摘要:图像二值化是图像预处理中的一项重要技术,在模式识别、光学字符识别、医学成像等方面都有重要应用。论文介绍了图像及数字图像处理技术的一些概念和相关知识;对VC++ 软件的发展和软件在图像处理中的应用做了简要介绍;还介绍了图像二值化算法以及利用VC++软件工具进行算法的实现。论文重点实现了图像分割技术中常用灰度图像二值化算法,如Otsu算法、Bernsen算法,并对这些算法运行的实验结果进行分析与比较。 关键词:图像处理;二值化;VC++; 1.引言 1.1 图像与数字图像 图像就是用各种观测系统观测客观世界获得的且可以直接或间接作用与人眼而产生视觉的实体。视觉是人类从大自然中获取信息的最主要的手段。拒统计,在人类获取的信息中,视觉信息约占60%,听觉信息约占20%,其他方式加起来才约占20%。由此可见,视觉信息对人类非常重要。同时,图像又是人类获取视觉信息的主要途径,是人类能体验的最重要、最丰富、信息量最大的信息源。通常,客观事物在空间上都是三维的(3D)的,但是从客观景物获得的图像却是属于二维(2D)平面的。 数字图像:数字图像是将连续的模拟图像经过离散化处理后得到的计算机能够辨识的点阵图像。在严格意义上讲,数字图像是经过等距离矩形网格采样,对幅度进行等间隔量化的二维函数。因此,数字图像实际上就是被量化的二维采样数组。 1.2 数字图像处理技术内容与发展现状 数字图像处理就是采用一定的算法对数字图像进行处理,以获得人眼视觉或者某种接受系统所需要的图像处理过程。图像处理的基础是数字,主要任务是进行各种算法设计和算法实现。 图像处理技术的发展大致经历了初创期、发展期、普及期和实用化期4个阶段。初创期开始与20世纪60年代,当时的图像采用像素型光栅进行少秒显示,大多采用中、大型机对其处理。在这一时期,由于图像存储成本高、处理设备昂贵,其应用面很窄。进入20世纪70年代的发展期,开始大量采用中、小型机进行处理,图像处理也逐渐改用光栅扫描方式,特别是CT和卫星遥感图像的出现,对图像处理技术的发展起到了很好的推动作用。到了20世纪80年代,图像处理技术进入普及期,此时的微机已经能够担当起图形图像处理的任务。超大规模集成电路(Very Large Scale Integration, VLSI)的出现更使处理速度大大提高,设备造价也进一步降低,极大地促进了图形图像系统的普及和应用。20世纪90年代是图像处理技术的实用化时期,图像处理的信息量巨大,对处理速度的要求极高。 1.3 图像二值化原理及意义 图像二值化是指用灰度变换来研究灰度图像的一种常用方法,即设定某一阈值将灰度 龙源期刊网 https://www.doczj.com/doc/bb3033607.html, 图像引擎算法及其应用的研究 作者:李梅陈立 来源:《电脑知识与技术》2008年第35期 摘要:随着视频游戏的发展,新技术的不断出现、更新,使得游戏变得更为精彩,游戏玩家们对游戏质量的要求也在不断地提高,而精彩的游戏需要一套好的图像引擎来实现,但国内现在的图像引擎的发展还不够强大。在此背景下这篇文章研究了几种图像引擎的算法,并将之用于计算机三维图像编程中,制作了一个演示软件——Magic Box,模拟了现实世界中的风、雨、雷、电等各种自然现象以及天空顶等。 关键词:图像引擎;粒子系统;OpenGL;DirectX;仿真;虚拟现实 中图分类号:TP301文献标识码:A文章编号:1009-3044(2008)35-2387-03 Study of Graphic Engine Arithmetic and Application LI Mei1, CHEN Li2 (1. Computer Since Department, Guangdong Agriculture Industry Business Polytechnic College, Guangzhou 510507, China;2. Guangzhou Yueqin Information consultation Cor., Guangzhou 510507, China) Abstract: Game is becoming more wonderful along with the development of video game and appearance of new technology. The player's demands about game quality are increased. Wonderful game needs one good graphic engine. But the development of graphic engine isn't mightiness in China. So, this paper studied some arithmetic of graphic engine on this background. And the writer developed computer three dimension animation-Magic Box. This software simulated some nature phenomena-wind, rain, thunder, lightning, and so on. Key words: graphic engine; particle system; openGL;directX;simulation;visual reality 1 引言 虚拟现实、科学计算可视化及多媒体技术的飞速发展均对用户界面提出了更高的要求。目前,国内外已存在为数不少的图像引擎,但都或多或少存在一些缺陷,如平台面向PC环境,对于系统资源的要求较高,尽管剪裁后可能可以适应对于静态空间的要求,但对动态空间的要求依然难以降低,而且经剪裁以后,其功能受到极大削弱;而有些平台尽管较为成熟,但真正基于matlab的图像去雾算法详细讲解与实现-附matlab实现源代码
运动模糊图像复原算法实现及应用
图像拼接算法及实现.doc
基于MATLAB的图像平滑算法实现及应用
数字图像处理算法汇总
图的算法实现
基本的图算法
新旧图幅编号
图的最短路径算法的实现
图的两种存储结构及基本算法
基本数字(精选)图像处理算法的matlab实现
基于Matlab的图像边缘检测算法的实现及应用
图像二值化算法研究与实现
图像引擎算法及其应用的研究
相关主题
文本预览