电阻加热炉温度控制系统设计
一、摘要
温度是工业对象中主要的被控参数之一。尤其是在冶金、化工、机械各类工业中,广泛使用各种加热炉、热处理炉、反应炉等。由于炉子的种类不同,所采用的加热方法及燃料也不相同,如煤气、天然气等。但就控制系统本身的动态特性而言,均属于一阶纯滞后环节,在控制算法上基本相同,可采用PID控制或其他纯滞后补偿算法。但对于电阻加热炉来说,当其温度一旦超调就无法用控制手段使其降温,因而很难用数学方法建立精确模型和确定参数。而传统PID控制是一种建立在经典控制理论基础上的控制策略,其设计依赖于被控对象的数学模型,因此对于加热炉这类控制对象采用传统PID的控制方案很难达到理想的控制效果。
为了保证生产过程正常安全地进行,提高产品的质量和数量,以及减轻工人的劳动强度,节约能源,对加热用的各种电炉要求在一定条件下保持恒温,不能随电源电压波动或炉内物体而变化,或者有的电炉的炉温根据工艺要求按照某个指定的升温或保温规律而变化,等等。因此,在工农业生产或科学实验中常常对温度不仅要不断地测量,而且要进行控制。在电阻炉温度控制系统的设计中,应尽量考虑到如何有效地避免各种干扰因素而采用一个较好的控制方案,选择合适芯片及控制算法是非常有必要的本设计要用单片机设计一个电阻炉温度控制系统。
电阻炉的类型根据其热量产生的方式不同,可分为间接加热式和直接加热式两大类。间接加热式电阻炉,就是在炉子内部有专用的电阻材料制作的加热元件,电流通过加热元件时产生热量,再通过热的传导、对流、辐射而使放置在炉中的炉料被加热。直接加热式电阻炉,是将电源直接接在所需加热的材料上,让强大的电流直接流过所需加热的材料,使材料本身发热从而达到加热的效果。工业电阻炉,大部分采用间接加热式,只有一小部分采用直接加热式。由于电阻炉具有热效率高、热量损失小、加热方式简单、温度场分布均匀、环保等优点,应用十分广泛。
二、总体方案设计
1、设计任务:
电阻加热炉用于合金钢产品热力特性实验,电加热炉用电炉丝提供功率,使其在预定的
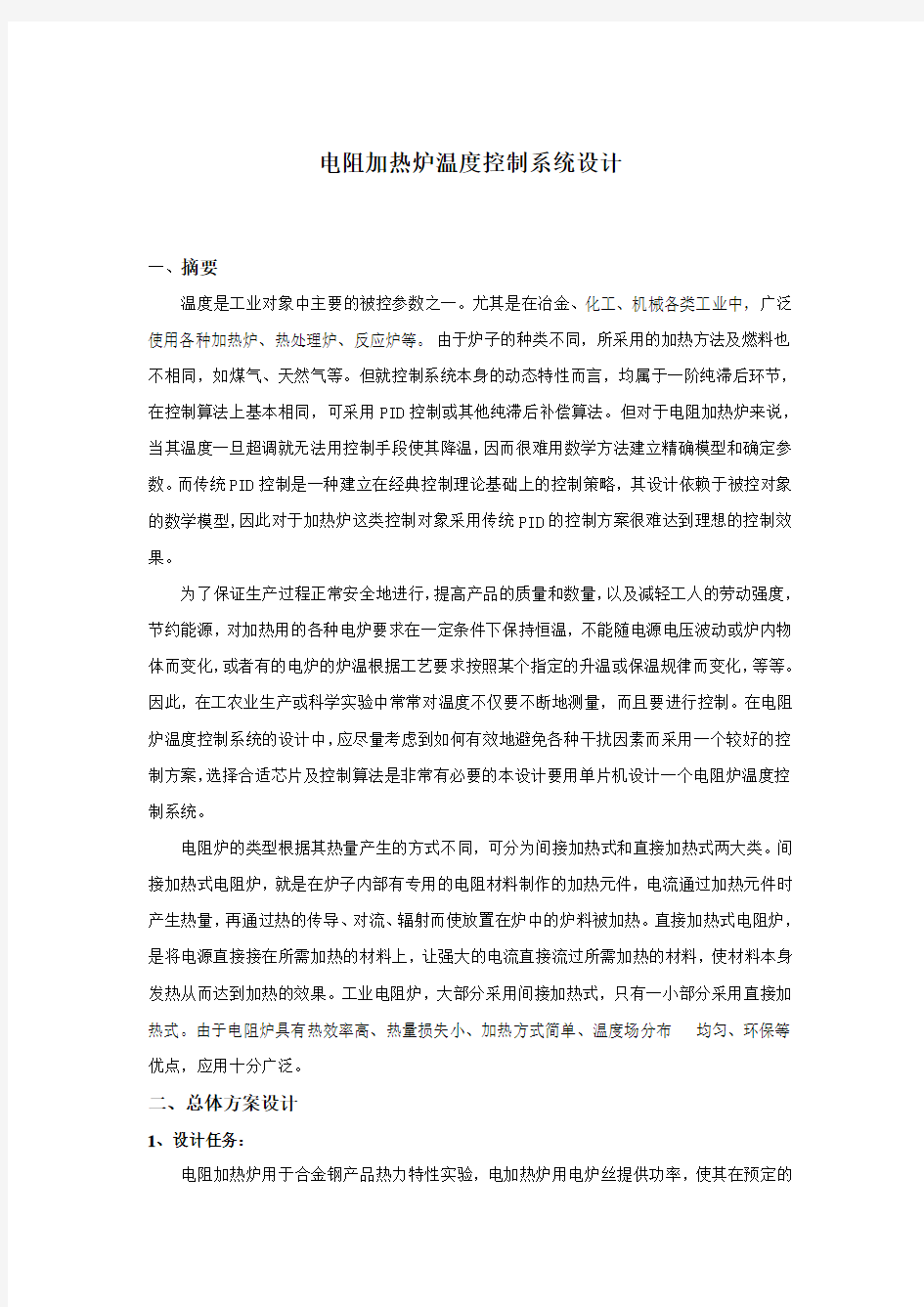
时间内将炉内温度稳定到给定的温度值。本控制对象电阻加热炉功率为8KW ,由220V 交流电源供电,采用双向可控硅进行控制。
电阻丝
温度T
2、工艺要求:
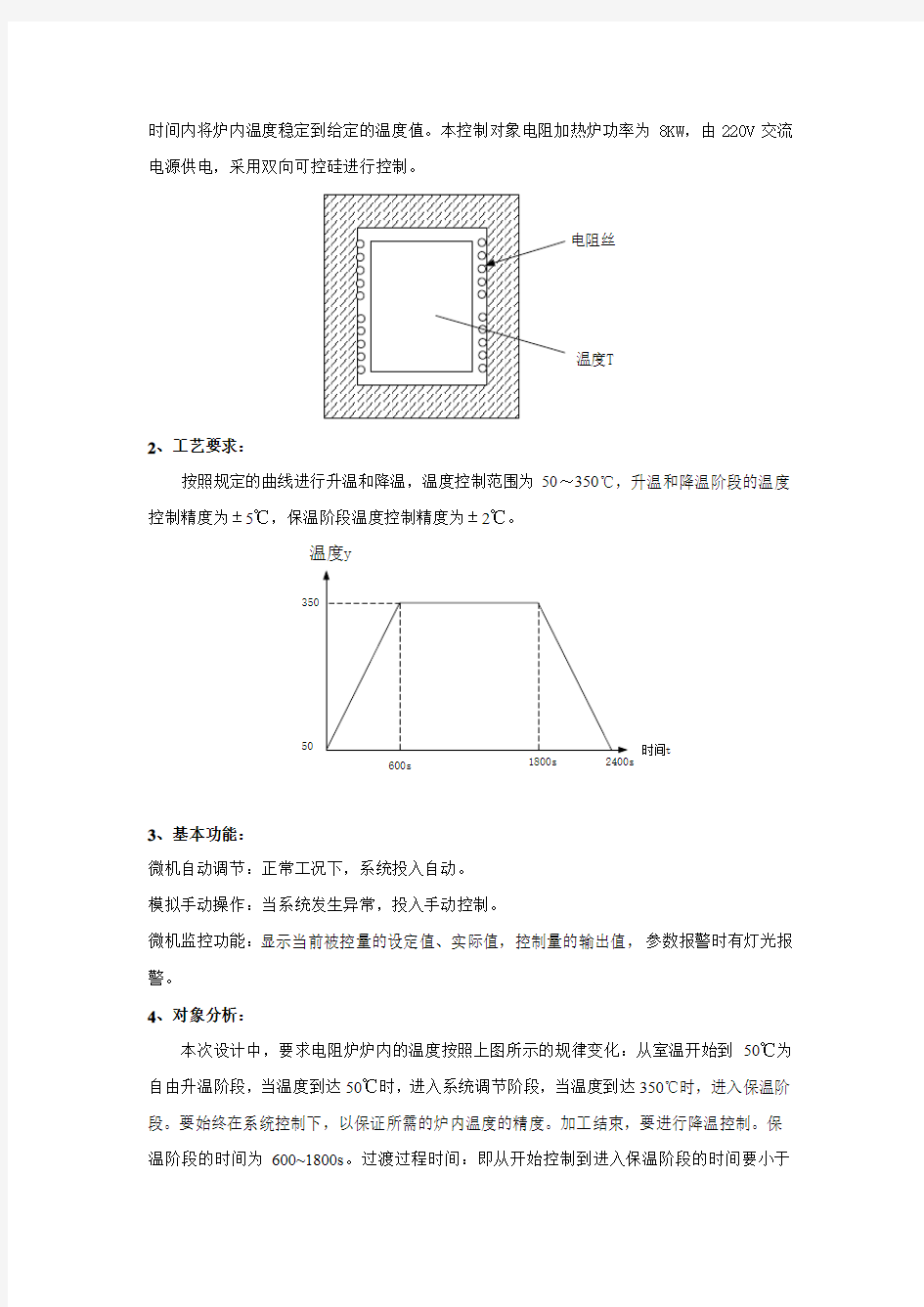
按照规定的曲线进行升温和降温,温度控制范围为50~350℃,升温和降温阶段的温度控制精度为±5℃,保温阶段温度控制精度为±2℃。
温度y
350
600s
1800s
50
2400s
时间t
3、基本功能:
微机自动调节:正常工况下,系统投入自动。 模拟手动操作:当系统发生异常,投入手动控制。
微机监控功能:显示当前被控量的设定值、实际值,控制量的输出值,参数报警时有灯光报警。
4、对象分析:
本次设计中,要求电阻炉炉内的温度按照上图所示的规律变化:从室温开始到50℃为自由升温阶段,当温度到达50℃时,进入系统调节阶段,当温度到达350℃时,进入保温阶段。要始终在系统控制下,以保证所需的炉内温度的精度。加工结束,要进行降温控制。保温阶段的时间为600~1800s 。过渡过程时间:即从开始控制到进入保温阶段的时间要小于
600s 。在保温段当温度高于352℃或低于348℃时要报警,在升温和降温阶段也要进行控制,使炉内温度按照曲线的斜率升或降。 5、系统整体设计:
采用MCS —51单片机作为控制器,ADC0809模数转换芯片为模拟量输入,DAC0832数模转换芯片为模拟量输出,铂电阻为温度检测元件,运算放大器和可控硅作为功率放大,电阻炉为被控对象,组成电阻炉炉温控制系统,另外,系统还配有数字显示,以便显示和记录生产过程中的温度和输出值。 6、系统模型:
1
1788.2)(40+=-s e s G s
三、硬件设计与实现
1.计算机选型和系统总线: 1) 单片机:MCS —51系列8031 2) 系统总线:PC 总线
2.外围电路设计: 1) 矩阵键盘技术:
图1为4×8矩阵组成的32键盘与微机接口电路。图中8255端口C 为行扫描口,工作于输出方式,端口A 工作于输入方式,用来读入列值。图中I/O 口地址必须满足=0,才能选中相应的寄存器。在每一行与列的交叉点接一个按键,故4×8共32个键。
图1:应用8255接口的4×8键盘矩阵
2) 温度输出显示技术:
LED静态显示接口技术,所谓静态显示,即CPU输出显示值后,由硬件保存输出值,保持显示结果。
图2为6位BCD码静态显示电路原理图。图中74LS244为总线驱动器,6位数字显示共用同一组总线,每个LED显示器均配有一个锁存器(74LS377),用来锁存待显示的数据。当被显示的数据从数据总线经74LS244传送到各锁存器的输入端后,到底哪一个锁存器选通,取决于地址译码器74LS138各输出位的状态。总线驱动器74LS244由IOW和A9控制,当IOW和A9同时为低电平时,74LS244打开,将数据总线上的数据传送到各个显示器的锁存器74LS377上。
技术特点:占用机时少,显示可靠,但使用元件多,线路复杂,成本高。
图2:用锁存器连接的6位静态显示电路
3)报警电路设计:
正常运行时绿灯亮,在保温阶段,一旦炉内温度超出系统允差范围,就要进行报警。报警时,红灯亮,电笛响,同时发送中断信号至CPU进行处理。
图3:加热炉报警系统
3.模拟量输入通道设计:
因为所控的实际温度在50 ~350℃,350-50=300. 所以选用8位A/D转换器,其分辨率约为1.5℃/字,再加放大器偏置措施实现(通过调整放大器的零点来实现偏置)。这里采用一般中速芯片ADC0809。ADC0809是带有8位A/D转换器,8路多路开关以及微型计算机兼容的控制逻辑的CMOS组件,其转换方法为逐次逼近型。8路的模拟开关由地址锁存器和译码器控制,可以在8个通道中任意访问一个通道的模拟信号。这种器件无需进行零位和满量程调整。由于多路开关的地址输入部分能够进行锁存和译码,而且其三态TTL输出也可以锁存,所以它易于与微型计算机接口。其具有较高的转换速度和精度,受温度影响较小,能较长时间保证精度,重现性好,功耗较低,故用于过程控制是比较理想的器件。
图4:ADC0809应用接线图
4.模拟量输出通道设计:
据其实际情况,D/A转换器的位数可低于A/D转换器的位数,因为一般控制系统对输出通道分辨率的要求比输入通道的低,所以这里采用常用的DAC0832芯片。DAC0832是8位D/A转换器,与微处理器完全兼容。期间采用先进的CMOS工艺,因此功耗低,输出漏电流误差较小。它的内部具有两级输入数据缓冲器和一个R-2RT型电阻网络,因DAC0832电流输出型D/A转换芯片,为了取得电压输出,需在电流输出端接运算放大器,Rf为为运算放大器的反馈电阻端。
双极性电压输出的D/A转换电路通常采用偏移二进制码、补码二进制码和符号一数值编码。只要在单极性电压输出的基础上再加一级电压放大器,并配以相关电阻网络就可以构成双极性电压输出。在图5中,运算放大器A2的作用是把运算放大器A1的单向输出电压
转变为双向输出。
图5:DAC0832双极性电压输出电路
5.元器件的选择:
1)传感器的选择:铂铑10—铂热电偶,S型,正极性,量程0—1300℃,使用温度小于等
于600℃,允差±1.5℃。
2)执行元件的选择:电阻加热炉采用晶闸管(SCR)来做规律控制,结合电阻炉的具体要
求,为了减少炉温的纹波,对输出通道采用较高的分辨率的方案,因此采用移相触发方式,并且由模拟触发器实现移相触发。
3)变送器的选择:因为系统要求有偏置,又需要对热电偶进行冷端补偿,所以采用常规的
DDZ系列温度变送器。
4)控制元件:采用双向可控硅进行控制,其功能相当于两个单向可控硅反向连接,具有双
向导通功能,其通断状态有控制极G决定。在控制极加上脉冲可使其正向或反向导通。
图6:可控硅加热炉控制原理图
四、数字控制器设计
1)控制算法:
整个闭环系统可用一个带纯滞后的一阶惯性环节来近似,所以其控制算法采用大林算法。
电阻加热炉温度控制系统模型为:
其广义的传递函数为:
大林算法的设计目标是设计一个合适的数字控制器,使整个闭环系统的传递函数相当于一个带有纯滞后的一阶惯性环节,即:通常认为对象与一个零阶保持器相串联,相对应的整个闭环系统的脉冲传递函数是:
2)计算过程:
连同零阶保持器在内的系统广义被控对象的传递函数:
系统闭环传递函数:
数字控制器:
消除振铃现象后的数字控制器:
离散化:
U(Z)—U(Z)Z—1=1.279E(Z)—1.226E(Z)Z—1
U(K)—U(K—1)=1.279E(K)—1.226E(K—1)最终得:
U(K)=U(K—1)+1.279E(K)—1.226E(K—1)
图7:电阻加热炉温度控制系统框图
五、软件设计
1)程序流程图:
a、系统主程序框图:
b、A/D转换子程序流程图:
c、LED显示流程图:
d、报警程序流程图:
e、数字控制算法子程序流程图:
2)源程序:
ORG 0000H
AJMP MAIN
ORG 0003H
AJMP KEYS
ORG 000BH
AJMP PIT0
ORG 001BH
AJMP PIT1 ;中断入口及优先级MAIN: MOV SP,#00H
CLR 5FH ;清上下限越限标志
MOV A,#00H
MOV R7,#09H
MOV R0,#28H
LP1: MOV @R0,A
INC R0
DJNZ R7,LP1
MOV R7,#06H
MOV R0,#39H
LP2: MOV @R0,A
INC R0
DJNZ R7,LP2
MOV R7,#06H
MOV RO,#50H
LP3: MOV @R0,A
INC R0
DINZ R7,LP3 ;清显示缓冲区
MOV 33H,#00H
MOV 34H,#00H ;赋KP高低字节
MOV 35H,#00H
MOV 36H,#00H ; 赋KI高低字节
MOV 37H,#00H
MOV 38H,#00H ; 赋KD高低字节
MOV 42H,#00H
MOV 43H,#00H ;赋K高低字节
MOV TMOD,#56H ;T0方式2,T1方式1计数
MOV TLO,#06H
MOV THO,#06H
MOV 25H,#163H ;设定值默认值350
SETB TR0 ;键盘高优先级
SETB ET0
SETB EX0
SETB EA ;开键盘T0。T1中断LOOP: MOV R0,#56H
MOV R1,#55H
LCALL SCACOV ;标度转化
MOV R0,#53H
LCALL DIR
NOP
LCALL DLY10MS
NOP
LCALL DLY10MS
AJMP LOOP ;等中断
;键盘子程序
KEYS: CLR EX0
CLR EA
PUSH PSW
PUSH ACC ;关中断
LCALL DLY10MS ;消抖
CC: JB P3.2 AA
SETB 5DH ;置“显示设定值温度值标志”
MOV A,25H ;取运算位的值
MOV B,#10H ;BCD码转化
DIV A B
MOV 52H,A
MOV A, B
MOV 51H, A
MOV R0,#50H
LCALL DIR ;显示设定温度
NOP
LCALL DLY10MS
NOP
LCALL DLY10MS
JB P1.7 ,BB
MOV R1,#25H
LCALL DAAD1
NOP
LCALL DLY10MS
AJMP CC
BB: JB P1.6 CC
MOV R1,#25H
LCALL DEEC1
NOP
LCALL DLY10MS
AJMP CC
AA: POP ACC
POP PSW
SETB EX0
SETB EA ;出栈
RETI
;显示子程序
DIR: MOV SCON ,#00H ;置串行口移位寄存器状态SETB P1.4 ;开显示
JB 5DH,DL1 ;显示设定温度DL2: MOV DPTR,#SEGT
DL0: MOV A,@R0
MOVC A,@A+DPTR
MOV SBUF ,A
LOOP1: JNB TI, LOOP1
CLR TI
INC R0
MOV A,@R0
MOVC A,@A+DPTR
ANL A, #7FH ;使数带小数点
MOV SBUF ,A
LOOP2: JNB TI,LOOP2
CLR TI
INC R0
MOV A,@R0
MOVC A,@A+DPTR
MOV SBUF,A
LOOP3: JNB TI,LOOP3
CLR TI
CLR P1.4
CLR 5DH
RET
DL1: MOV 50H,#0AH ;小数位黑屏
AJMP DL2
SEGT: DB 0C0H ,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H,0FFH ;加一子程序
DAAD1: MOV A,#00H
ORL A,@R1
ADD A,#01H
CJNE A,#30H,DAAD2 ;超过48度了吗?
DAAD3: MOV @R1,A
DAA: RET
DAAD2: JC DAAD3
MOV @R1,#15EH ;超过48则转回到355
AJMP DAA
;减一子程序
DEEC1: MOV A,@R1
DEC A
CJNE A,#15EH,DEEC2 ;低于355度了吗?
DEEC3: MOV @R1,A
DEE : RET
DEEC2: JNC DEEC3
MOV @R1,#30H ;低于355则转回到48
AJMP DEE
;T0中断子程序
PTT0: CLR EA
PUSH ACC
PUSH PSW
PUAH DPL
PUSH DPH
SETB EA ;压栈后开中断响应键盘PPP: LCALL SMAP ;采样数据
LCALL FILTER ;数字滤波
MOV A,2AH ;取采样值
CJNE A,#07H,AAA ;下限48比较
AJMP BBB
AAA: JC CCC ;小于48度转
CJNE A,#0FEH ,DDD ;上限355比较
AJMP BBB ;转至48~355正常范围处理DDD: JC BBB
CLR P1.2 ;大于355黄灯亮
SETB 5EH
CLR P1.1 ;置标志启动风扇
AJMP PPP
CCC: CLR P1.3 ;小于48红灯亮
SETB 5FH
BBB: CLR P1.0 ;置标志启动电炉
AJMP PPP
SETB P1.0
SETB P1.1
SETB P1.2
SETB P1.3
CLR 5EH
CLR 5FH ;50~350之间正常
LCALL PID
JNB 20H,EEF ;设定温度小于实际值转到风扇
MOV A,29H
LCALL FFF
CLR P1.0
LOOP10: MOV R0,#56H ;存放相乘结果的首址MOV R1,#55H ;赋显示缓冲区最高位地址
LCALL SCACOV ;标度转化
MOV R0,#53H ;赋显示首址
CLR DIR
JB D5H,LOOP10 ;等待T1中断
CLR EA
POP DPH
POP DPL
POP PSW
SETB EA
POP ACC
RETI
EEE: MOV A,28H ;风扇处理
LCALL FFF
CLR P1.1
AJMP LOOP10
FFF: CRL A ;根据PID结果计算T1初值INC A
MOV TL1,A
MOV TH1,#0FFH
SETB PI1
SETB TR1
SETB ET1
RET
;标度转化
SCACOV :PROC NEAR
MOV DX,0
MOV DATA1,#258H
MOV DATA2,#708H
MOV DATA3,#960H
PROC NEAR
MOV DX,0
MOV AX,DATAP ;取采样时间
CMP AX,DATA3 ;时间大于2400?
JAE Q3DOR
CMP AX,DATA2
JAE Q3-Q2 ; 1800<时间<2400
CMP AX,DATA3
JAE Q2-Q1 ; 600<时间<1800 Q0: MOV BX,0.8H ;<600S Q=50+t/2 MUL BX
ADC DX,0
JMP DONE
Q2-Q1: MOV AX,#15EH ;Q=350
Q3-Q2: SUB AX,DATA2 ;Q=350-(t-1800)/2 MOV BX,0.8H
MUL BX
MOV AX,#15EH
SUB AX,BX
MOV @R1,A
PP: RET
;采样子程序
SWAP: MOV R0,#20H
MOV R1,#03H
SAW1: MOV DPTR,#7FF8H
MOVX @DPTR A ;A/D转化
MOV R2,#20H
DLY: DJNZ R2,DLY ;延时
HERE: JB P3.3 ,HERE
MOV DPTR,#7FF8H
MOVX A,@DPTR ;读转化结果
MOV @R0,A
INC R0
DJNZ R1,SAM1
RET
;数字滤波
FILTER: MOV A, 20H
CJNE A,2DH CMP1
AJMP CMP2
CMP1: JNC C MP2
XCH A,2DH
XCH A,2CH
CMP2: MOV A,2DH
CJNE A,22EH,CMP3
MOV 2AH,A
AJMP RR
CMP3: JC CMP4
MOV 2AH,A
AJMP RR
CMP4: MOV A,2EH
CJNE A,2CH,CMP5
MOV 2AH ,A
AJMP RR
CMP5: JC CMP6
XCH A,2CH
CMP6: MOV 2AH,A
计算机控制技术课程设计 评语: 考勤(10)守纪(10)过程(30)设计报告(30)答辩(20)总成绩(100) 专业:自动化 班级:动201302 姓名:完新龙 学号:201309314 指导教师:侯涛 兰州交通大学自动化与电气工程学院 2016年07月15日
基于温度传感器的水温控制系统 1.设计要求 1升水加热,要求水温可以在20~100摄氏度范围内进行人工控制,并能在环境温度变化时实现自动调整,以保证在设计的温度。要求最小分辨率率为1摄氏度,温度控制的稳态误差小于0.2摄氏度,能够显示当前的温度。 2.设计方案 设计采用220V交流供电的150W加热器,利用DS18B20进行周期性检测,并将数据传递给单片机。上位机通过单片机传递的实时温度与给定温度进行比较得到误差,通过PID算法得到控制量,送给单片机通过单片机I/O口输出高电平占空比进行控制,实现对加热器控制。 2.1设计原理图 设计原理图如图1所示。 图1 设计原理图 2.2硬件选型 (1)控制器分为上位机和下位机。上位机为控制计算机,通过检测的温度与设定的温度进行比较,由设定的算法计算出控制量u;下位机为AT89C51即单片机,接收由上位机所给出的控制量,对执行机构进行控制。AT89C51具有如下特点:4kB Flash片内内存储器,128 byte RAM,32个外部双向输入输出口,5个中断优先级,2个16位可编程计数器,2个全双工串行通信口。 (2)D/A转换器采用DAC0832,8位D/A转换器,与微处理器完全兼容。DAC0832由8位输入锁存器、8位DAC寄存器、8位D/A转换电路及转换控制电路构成。主要参数:分辨率为0.0039;电流稳定时间1微秒;可单缓冲、双缓冲或直接数字输入;可单一电源供电(5V-15V);低功耗,20mW。 (3)执行机构采用交流加热器。根据相关资料对于加热一杯水,加热器可以迅速反应,提高动态响应速度。 (4)传感器采用DS18B20数字温度传感器。DS18B20具有体积小,硬件开销低,
、 北京理工大学珠海学院 课程设计任务书 2010 ~2011 学年第 2学期 学生姓名:林泽佳专业班级:08自动化1班指导教师:钟秋海工作部门:信息学院一、课程设计题目 : 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容|
! " [2 有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 , 1、求被控对象传递函数G(s)的MATLAB描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳 定的要求。(8分)
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。 (3分) ! 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。 (8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际 闭环系统稳定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。 & (8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) 三、进度安排 6月13至6月14:下达课程设计任务书;复习控制理论和计算机仿真知识,收集资料、熟悉仿真工具;确定设计方案和步骤。 6月14至6月16:编程练习,程序设计;仿真调试,图形仿真参数整定;总结整理设计、 仿真结果,撰写课程设计说明书。 6月16至6月17:完成程序仿真调试和图形仿真调试;完成课程设计说明书;课程设计答 辩总结。 [ 四、基本要求
计算机控制技术课程设计报告 学院自动化科学与工程 学生姓名 学生学号 指导教师 __ 提交日期 2013 年 7 月 8 日
目录 一、设计题目及要求 ................................................................... 错误!未定义书签。 二、整体设计与结构图 (3) 1、计算机控制系统结构图 (3) 2、硬件结构图 (4) 三、电路硬件设计 (5) 1、电桥电路 (5) 2、放大环节 (6) 3、滤波电路 (6) 4、A/D转换器 (7) 5、D/A 转换电路 (8) 四、参数计算及分析 (9) 1.参数确定 (9) 2.系统性能分析 (9) 五、控制方案及仿真 (9) θ的分析.....................................................................................................,9 1、0 = 1)控制方案分析 (11) 2)数字控制器D(z)的实现 (11) 3)系统仿真 (14) θ的分析 (18) 2、870 .0 = 1)控制方案分析与选择 (18) 2)数字控制器D(z)的实现 (19) 3)系统仿真 (23) 六、心得与体会 (27)
一.课程设计题目及要求 1、 针对一个具有纯滞后的一阶惯性环节 ()1 s Ke G s Ts τ-=+ 的温度控制系统和给定的系统性能指标: ? 工程要求相角裕度为30°~60°,幅值裕度>6dB ? 要求测量范围-50℃~200℃,测量精度0.5%,分辨率0.2℃ 2、 书面设计一个计算机控制系统的硬件布线连接图,并转化为系统结构图; 3、 选择一种控制算法并借助软件工程知识编写程序流程图; 4、 用MA TLAB 和SIMULINK 进行仿真分析和验证; 对象确定:K=10*log(C*C-sqrt(C)),rand(‘state ’,C),T=rang(1), 考虑θ=0或T/2两种情况。 C 为学号的后3位数,如C=325,K=115.7,T=0.9824,θ=0或0.4912 5、 进行可靠性和抗干扰性的分析。 二、整体设计与结构图 1、计算机控制系统结构图
微机课程设计报告
目录 一、需求分析 1、系统设计的意义 (3) 2、设计内容 (3) 3、设计目的 (3) 4、设计要求 (3) 5、系统功能 (4) 二、总体设计 1、交通灯工作过程 (4) 三、设计仿真图、设计流程图 1、系统仿真图 (5) 2、流程图 (6) 3、8253、8255A结构及功能 (8) 四、系统程序分析 (10) 五、总结与体会 (13) 六、参考文献 (13)
一、需求分析 1系统设计的意义: 随着社会经济的发展,城市问题越来越引起人们的关注。人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。城市交通控制系统是用于城市交通数据检测、交通信号灯控制与交通疏通的计算机综合管理系统,它是现代城市交通监控指挥系统中最重要的组成部分。 随着城市机动车量的不断增加,组多大城市如北京、上海、南京等出现了交通超负荷运行的情况,因此,自80年代后期,这些城市纷纷修建城市高速通道,在高速道路建设完成的初期,它们也曾有效地改善了交通状况。然而,随着交通量的快速增长和缺乏对高速道路的系统研究和控制,高速道路没有充分发挥出预期的作用。而城市高速道路在构造上的特点,也决定了城市高速道路的交通状况必然受高速道路与普通道路耦合处交通状况的制约。所以,如何采用合适的控制方法,最大限度利用好耗费巨资修建的城市高速通道,缓解主干道与匝道、城市同周边地区的交通拥堵状况,越来越成为交通运输管理和城市规划部门亟待解决的主要问题。 十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。交通灯的控制方式很多,本系统采用可编程并行I/O接口芯片8255A为中心器件来设计交通灯控制器,实现本系统的各种功能。同时,本系统实用性强,操作简单。 2、设计内容 采用8255A设计交通灯控制的接口方案,根据设计的方案搭建电路,画出程序流程图,并编写程序进行调试 3、设计目的 综合运用《微机原理与应用》课程知识,利用集成电路设计实现一些中小规模电子电路或者完成一定功能的程序,以复习巩固课堂所学的理论知识,提高程序设计能力及实现系统、绘制系统电路图的能力,为实际应用奠定一定的基础。针对此次课程设计主要是运用本课程的理论知识进行交通灯控制分析及设计,掌握8255A方式0的使用与编程方法,通从而复习巩固了课堂所学的理论知识,提高了对所学知识的综合应用能力。 4、设计要求: (1)、分别用C语言和汇编语言编程完成硬件接口功能设计; (2)、硬件电路基于80x86微机接口;
《电气控制技术综合实践》课程设计任务书 班级: 08电气本1 课程设计题目:阀门电动执行器控制模块设计 一、设计目的和要求 电气控制技术综合实践是电气工程及其自动化专业学生在所有专业课结束时进行的一次课程设计,是一个综合运用专业知识的过程。其目的在于全面检验学生对专业基础课和专业课知识的掌握情况,提高知识综合运用能力和动手实践能力。设计包括确定控制任务、系统总体方案设计、硬件系统设计、控制软件的设计、系统调试、性能测试等方面的要求,以便使学生掌握电气控制系统设计的总体思路和方法。 二、设计内容及步骤 1 任务提出 电动执行器是工业过程控制中的重要设备,它接收来自调节器的模拟信号(一般是4~20mA 电流信号)或上位机的数字信号, 将其转换为电动执行器相对应的机械位移(转角、直线或多转)并自动改变操作变量(调节阀、风门、挡板开度等),以达到对被调参数(温度、压力、流量、液位等)进行自动调节的目的,使生产过程按预定要求进行。 本课题要求设计一个阀门电动执行器控制模块。 1.1 对象参数: (1)电动机为单相异步电动机,额定功率10W,额定电流0.16A,外接电容CBB61、1.5uF500V。 (2)电源:220V±10%,50Hz。 (3)环境温度:-25~80℃。 (4)环境湿度:≤95%RH。 1.2 基本功能要求: (1)输入4~20mA或1~5V控制信号,相应阀门开度在0~100%之间变化。 (2)输入信号失效,位置保持原位。 (3)可就地手动操作。 (4)死区可以调整。 1.3 扩展功能要求(选做) (1)过力矩保护。 (2)行程限位保护。 (3)定位误差:≤1%。 (4)灵敏度:0.025%(1/4096)。 2 设计内容及步骤 2.1 系统方案的确定 2.2 硬件系统设计 2.2.1主电路设计
《计算机控制技术》课程设计单闭环直流电机调速系统
1 设计目的 计算机控制技术课程是集微机原理、计算机技术、控制理论、电子电路、自动控制系统、工业控制过程等课程基础知识一体的应用性课程,具有很强的实践性,通过这次课程设计进一步加深对计算机控制技术课程的理解,掌握计算机控制系统硬件和软件的设计思路,以及对相关课程理论知识的理解和融会贯通,提高运用已有的专业理论知识分析实际应用问题的能力和解决实际问题的技能,培养独立自主、综合分析与创新性应用的能力。 2 设计任务 2.1 设计题目 单闭环直流电机调速系统 实现一个单闭环直流电机调压调速控制,用键盘实现对直流电机的起/停、正/反转控制,速度调节要求既可用键盘数字量设定也可用电位器连续调节,需要有速度显示电路。扩展要求能够利用串口通信方式在PC上设置和显示速度曲线并且进行数据保存和查看。 2.2 设计要求 2.2.1 基本设计要求 (1)根据系统控制要求设计控制整体方案;包括微处理芯片选用,系统构成框图,确定参数测围等; (2)选用参数检测元件及变送器;系统硬件电路设计,包括输入接口电路、逻辑电路、操作键盘、输出电路、显示电路; (3)建立数学模型,确定控制算法; (4)设计功率驱动电路; (5)制作电路板,搭建系统,调试。 2.2.2 扩展设计要求 (1)在已能正常运行的微计算机控制系统的基础上,通过串口与PC连接; (2)编写人机界面控制和显示程序;编写微机通信程序;实现人机实时交互。
3方案比较 方案一:采用继电器对电动机的开或关进行控制。这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较短、可靠性不高。 方案二:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。 方案三:采用由电力电子器件组成的H 型PWM 电路。用单片机控制电力电子器件使之工作在占空比可调的开关状态,精确调整电动机转速。这种电路由于工作在电力电子器件的饱和截止模式下,效率非常高;H 型电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也极佳,是一种广泛采用的PWM 调速技术。 兼于方案三调速特性优良、调整平滑、调整围广、过载能力大,因此本设计采用方案三。 4单闭环直流电机调速系统设计 4.1单闭环调速原理 4.1.1 闭环系统框图 4.1.2 调速原理 直流电机转速有: 常数Ke Ka 不变,Ra 比较小。 所以调节Ua 就能调节n 。 n n I K R K U K R I U n d d a e e d ?-=Φ -Φ=-=0φa a a U I U ≈-
《信息系统仿真课程设计》 课程设计报告 题目信息系统课程设计仿真 院(系): 信息科学与技术工程学院 专业班级:通信工程1003 学生姓名: 学号: 指导教师:吴莉朱忠敏 2012年1 月14 日至2012年1 月25 日 华朴中科技大学武昌分校制 信息系统仿真课程设计任务书
20 年月日 目录 摘要 (5)
一、Simulink 仿真设计 (6) 1.1 低通抽样定理 (6) 1.2 抽样量化编码 (9) 二、MATLA仿真设计 (12) 2.1 、自编程序实现动态卷积 (12) 2.1.1 编程分析 (12) 2.1.2 自编matlab 程序: (13) 2.1.3 仿真图形 (13) 2.1.4 仿真结果分析 (15) 2.2 用双线性变换法设计IIR 数字滤波器 (15) 2.2.1 双线性变换法的基本知识 (15) 2.2.2 采用双线性变换法设计一个巴特沃斯数字低通滤波器 (16) 2.2.3 自编matlab 程序 (16) 2.2.4 仿真波形 (17) 2.2.5 仿真结果分析 (17) 三、总结 (19) 四、参考文献 (19) 五、课程设计成绩 (20) 摘要 Matlab 是一种广泛应用于工程设计及数值分析领域的高级仿真平台。它功能
强大、简单易学、编程效率高,目前已发展成为由MATLAB 语言、MATLAB 工作环境、MATLAB 图形处理系统、MATLAB 数学函数库和MATLAB 应用程序接口五大部分组成的集数值计算、图形处理、程序开发为一体的功能强大的系统。本次课程设计主要包括MATLAB 和SIMULINKL 两个部分。首先利用SIMULINKL 实现了连续信号的采样及重构,通过改变抽样频率来实现过采样、等采样、欠采样三种情况来验证低通抽样定理,绘出原始信号、采样信号、重构信号的时域波形图。然后利用SIMULINKL 实现抽样量化编码,首先用一连续信号通过一个抽样量化编码器按照A 律13折线进量化行,观察其产生的量化误差,其次利用折线近似的PCM 编码器对一连续信号进行编码。最后利用MATLAB 进行仿真设计,通过编程,在编程环境中对程序进行调试,实现动态卷积以及双线性变换法设计IIR 数字滤波器。 本次课程设计加深理解和巩固通信原理、数字信号处理课上所学的有关基本概念、基本理论和基本方法,并锻炼分析问题和解决问题的能力。
计算机控制技术课程设计任务书 题目1:通用数字PID调节器设计 1、主要技术数据和设计要求 主要技术数据:8路模拟量输入:适配1~5V输入,量程自由设定;8路输出控制信号:1~5V标准电压输出;输入模拟量转换精度:0.1%;RS232串行通讯通口。 控制模型:数字PID控制算法;PID参数范围:比例带Kp:1-999.9%,积分时间Ti:1-9999秒(Ti=9999时积分切除),微分时间Td::0-9999秒(Td=0时微分切除)。 调节控制器使用51内核的单片机,完成对8路模拟信号的切换、信号变换、A/D转换;单片机对数据处理后(含数字滤波、数值变换),送到显示和通讯部分,并经PID运算处理后通过D/A转换器输出。经信号变换和信号分配后输出8路控制信号。设计中应充分考虑干扰问题。 2、设计步骤 一、总体方案设计、控制系统的建模和数字控制器设计 二、硬件的设计和实现 1. 选择计算机机型(采用51内核的单片机); 2. 设计支持计算机工作的外围电路(EPROM、RAM、I/O端口等); 3. 设计键盘、显示接口电路; 4. 设计8路模拟量输入输出通道; 5. 设计RS232串行通讯通口; *6. 其它相关电路的设计或方案(电源、通信等)。 三、软件设计 1. 分配系统资源,编写系统初始化和主程序模块; 2. 编写数字PID调节器软件模块; 3. 编写数字滤波程序; *4. 编写A/D、D/A转换器处理程序模块; *5. 其它程序模块(显示与键盘等处理程序)。 四、编写课程设计报告,绘制完整的系统电路图。
计算机控制技术课程设计任务书 题目2:双闭环直流电动机数字调速系统设计 1、主要技术数据和设计要求 主要技术数据:直流电动机(对象)的主要技术参数如下:直流电动机Ped=3kW,Ued=220v ,ned=1500r/min,电枢回路总电阻R=2.50欧姆,电动机回路电磁时间常数TL=0.017s,机电时间常数TM=0.076s,电势常数Ce=0.1352V/r·min),晶闸管装置放大倍数Ks=30,整流电路滞后时间Ts=0.0017s。 主要技术指标:速度调节范围0-1500r/min,速度控制精度0.1%(额定转速时),电流过载倍数为1.5倍。 主要要求:直流电动机的控制电源采用PWM控制方式,在其输入电压为0-5伏时可以输出0-264伏电压,为电机提供最大25安培输出电流。速度检测采用光电编码器,且假定其输出的A、B两相脉冲经光电隔离辨向后获得每转1024个脉冲的角度分辨率和方向信号。电流传感器采用霍尔电流传感器,其原副边电流比为1000:1,额定电流为50安培。采用双闭环(速度和电流环)控制方式。 2、设计步骤 一、总体方案设计、控制系统的建模和数字控制器设计 二、硬件的设计和实现 1. 选择计算机机型(采用51内核的单片机); 2. 设计支持计算机工作的外围电路(EPROM、RAM、I/O端口等); 3. 设计键盘、显示接口电路; 4. 设计输入输出通道(速度反馈、电流反馈电路、输出驱动电路等); *5.它相关电路的设计或方案(电源、通信等)。 三、软件设计 分配系统资源,编写系统初始化和主程序模块; 2. 编写数字调节器软件模块; 3. 编写A/D转换器处理程序模块; *4.编写输出控制程序模块; *5.其它程序模块(数字滤波、显示与键盘等处理程序)。 四、编写课程设计说明书,绘制完整的系统电路图。
微型计算机技术课程设计 指导教师: 班级: 姓名: 学号: 班内序号: 课设日期: _________________________
目录 一、课程设计题目................. 错误!未定义书签。 二、设计目的..................... 错误!未定义书签。 三、设计内容..................... 错误!未定义书签。 四、设计所需器材与工具 (3) 五、设计思路..................... 错误!未定义书签。 六、设计步骤(含流程图和代码) ..... 错误!未定义书签。 七、课程设计小结 (36)
一、课程设计题目:点阵显示系统电路及程序设计 利用《汇编语言与微型计算机技术》课程中所学的可编程接口芯片8253、8255A、8259设计一个基于微机控制的点阵显示系统。 二、设计目的 1.通过本设计,使学生综合运用《汇编语言与微型计算机技术》、《数字电子技术》等课程的内容,为今后从事计算机检测与控制工作奠定一定的基础。 2.掌握接口芯片8253、8255A、8259等可编程器件、译码器74LS138、8路同相三态双向总线收发器74LS245、点阵显示器件的使用。 3.学会用汇编语言编写一个较完整的实用程序。 4.掌握微型计算机技术应用开发的全过程,包括需求分析、原理图设计、元器件选用、布线、编程、调试、撰写报告等步骤。 三、设计内容 1.点阵显示系统启动后的初始状态 在计算机显示器上出现菜单: dot matrix display system 1.←left shift display 2.↑up shift display 3.s stop 4.Esc Exit 2.点阵显示系统运行状态 按计算机光标←键,点阵逐列向左移动并显示:“微型计算机技术课程设计,点阵显示系统,计科11302班,陈嘉敏,彭晓”。 按计算机光标↑键,点阵逐行向上移动并显示:“微型计算机技术课程设计,点阵显示系统,计科11302班,陈嘉敏,彭晓”。 按计算机光标s键,点阵停止移动并显示当前字符。 3.结束程序运行状态 按计算机Esc键,结束点阵显示系统运行状态并显示“停”。 四.设计所需器材与工具 1.一块实验面包板(内含时钟信号1MHz或2MHz)。 2.可编程芯片8253、8255、74LS245、74LS138各一片,16×16点阵显示器件一片。
湖南工学院 《电气控制技术》课程设计 选题及任务 课程名称电气控制技术计划学时 1周 教师姓名罗雪莲授课班级自本1101-1103 教研室主任签字日期 学院院长签字日期
一、课程设计选题 设计一电镀行车PLC控制系统设计 设计二全自动洗衣机PLC控制 设计三三路智力抢答器的PLC控制 设计四十字路口交通信号灯PLC控制系统设计与调试 设计五五层电梯模型PLC 控制系统设计与调试 设计六自动售货机的PLC控制 设计七注塑机的PLC控制系统设计 设计八橡胶挤出机的变频器控制设计 设计九花式喷水池的PLC控制系统设计 设计十LED点阵图形显示的PLC控制 设计十一箱体加工专用机床的PLC控制系统设计 设计十二带有转向灯的十字路口交通信号灯PLC控制系统设计 二、设计要求 1.一人一题,相同题目者设计报告不能雷同; 2.PLC选型任意,组态软件选择任意; 3.课程设计报告要做到层次清晰,论述清楚,图表正确,书写工整; 4.成绩根据设计报告和答辩演示(PPT+电脑仿真)给定。 三.设计任务 1.根据控制要求设计程序及必要的硬件系统。 2.PLC选择及I/O及其它PLC元器件分配。 3.选择电器元件,编制元件目录表。 4.设计梯形图。 5.完成上位机的组态监控设计 6.在计算机上进行仿真调试; 7.用计算机绘制主电路图、PLC控制电路图、电器元件布置图。 8.编写设计说明书及设计小结。 四.设计参考资料 [1]史国生主编.电气控制与可编程控制器技术(第三版).北京:化学工业出版社,2010 [2]罗雪莲编著.可编程控制器原理及应用. 北京:清华大学出版社,2008 [3]钟肇新,范建东.可编程控制器原理及应用(第4版). 广州:华南理工大学出版社,2008 [4]胡健主编.西门子S7-300PLC应用教程. 北京:机械工业出版社,2007 [5]柳春生编著.电器控制与PLC(西门子S7-300机型).北京:机械工业出版社,2010 [6]刘美俊编著.西门子S7系列PLC的应用与维护.北京:机械工业出版社,2008 [7]胡学林.可编程控制器应用技术.北京:高等教育出版社,2001 [8]吉顺平.可编程序控制器原理与应用.北京:机械工业出版社,2011 [9]郁汉琪.机床电气及可编程序控制器实验、课程设计指导书.北京:高等教育出版社,2001 [10]《工厂常用高低压电气设备手册》上下册 [11]《工厂常用高低压电气设备手册》增补本 [12] 刑郁甫、杨天民、赵积善编.新编实用电工手册, 北京:地质出版社,1997
《计算机控制》课程设计报告 题目: 超前滞后矫正控制器设计 姓名: 学号: 10级自动化 2013年12月2日
《计算机控制》课程设计任务书 指导教师签字:系(教研室)主任签字: 2013年11 月25 日
1.控制系统分析和设计 1.1实验要求 设单位反馈系统的开环传递函数为) 101.0)(11.0(100 )(++= s s s s G ,采用模拟设 计法设计数字控制器,使校正后的系统满足:速度误差系数不小于100,相角裕度不小于40度,截止角频率不小于20。 1.2系统分析 (1)使系统满足速度误差系数的要求: ()() s 0 s 0100 lim ()lim 100 0.1s 10.011V K s G s s →→=?==++ (2)用MATLAB 画出100 ()(0.11)(0.011) G s s s s = ++的Bode 图为: -150-100-50050 100M a g n i t u d e (d B )10 -1 10 10 1 10 2 10 3 10 4 P h a s e (d e g ) Bode Diagram Gm = 0.828 dB (at 31.6 rad/s) , P m = 1.58 deg (at 30.1 rad/s) Frequency (rad/s) 由图可以得到未校正系统的性能参数为: 相角裕度0 1.58γ=?, 幅值裕度00.828g K dB dB =, 剪切频率为:030.1/c rad s ω=, 截止频率为031.6/g rad s ω=
(3)未校正系统的阶跃响应曲线 024******** 0.20.40.60.811.2 1.41.61.8 2Step Response Time (seconds) A m p l i t u d e 可以看出系统产生衰减震荡。 (4)性能分析及方法选择 系统的幅值裕度和相角裕度都很小,很容易不稳定。在剪切频率处对数幅值特性以-40dB/dec 穿过0dB 线。如果只加入一个超前校正网络来校正其相角,超前量不足以满足相位裕度的要求,可以先缴入滞后,使中频段衰减,再用超前校正发挥作用,则有可能满足要求。故使用超前滞后校正。 1.3模拟控制器设计 (1)确定剪切频率c ω c ω过大会增加超前校正的负担,过小会使带宽过窄,影响响应的快速性。 首先求出幅值裕度为零时对应的频率,约为30/g ra d s ω=,令 30/c g rad s ωω==。 (2)确定滞后校正的参数 2211 3/10 c ra d s T ωω= ==, 20.33T s =,并且取得10β=
《计算机仿真及应用》课程设计报告书 学号:08057102,08057127 班级:自动化081 姓名陈婷,万嘉
目录 一、设计思想 二、设计步骤 三、调试过程 四、结果分析 五、心得体会 六、参考文献
选题一、 考虑如下图所示的电机拖动控制系统模型,该系统有双输入,给定输入)(t R 和负载输入)(t M 。 1、 编制MATLAB 程序推导出该系统的传递函数矩阵。 2、 若常系数增益为:C 1=Ka =Km =1,Kr =3,C2=0.8,Kb =1.5,时间常数T 1=5, T 2=0.5,绘制该系统的根轨迹、求出闭环零极点,分析系统的稳定性。若)(t R 和)(t M 分别为单位阶跃输入,绘制出该系统的阶跃响应图。(要求C 1,Ka ,Km ,Kr ,C2,Kb , T 1,T 2所有参数都是可调的) 一.设计思想 题目分析: 系统为双输入单输出系统,采用分开计算,再叠加。 要求参数均为可调,而matlb 中不能计算未赋值的函数,那么我们可以把参数设置为可输入变量,运行期间根据要求赋值。 设计思路: 使用append 命令连接系统框图。 选择‘参数=input('inputanumber:')’实现参数可调。 采用的方案: 将结构框图每条支路稍作简化,建立各条支路连接关系构造函数,运行得出相应的传递函数。 在得出传递函数的基础上,使用相应的指令求出系统闭环零极点、画出其根轨迹。 通过判断极点是否在左半平面来编程判断其系统是否稳定。 二.设计步骤 (1)将各模块的通路排序编号
(2)使用append命令实现各模块未连接的系统矩阵 (3)指定连接关系 (4)使用connect命令构造整个系统的模型 三.调试过程 出现问题分析及解决办法: 在调试过程出现很多平时不注意且不易寻找的问题,例如输入的逗号和分号在系统运行时不支持中文格式,这时需要将其全部换成英文格式,此类的程序错误需要细心。 在实现参数可调时初始是将其设为常量,再将其赋值进行系统运行,这样参数可调性差,后用‘参数=input('inputanumber:')’实现。 最后是在建立通路连接关系时需要细心。 四.结果分析 源代码: Syms C1 C2 Ka Kr Km Kb T1 T2 C1=input('inputanumber:') C2=input('inputanumber:') Ka=input('inputanumber:') Kr=input('inputanumber:') Km=input('inputanumber:') Kb=input('inputanumber:') T1=input('inputanumber:') T2=input('inputanumber:') G1=tf(C1,[0 1]); G2=tf(Ka*Kr,[0 1]); G3=tf(Km,[T1 1]); G4=tf(1,[T2 1]); G5=tf(1,[1 0]); G6=tf(-C2,1); G7=tf(-Kb,1); G8=tf(-1,1); Sys=append(G1,G2,G3,G4,G5,G6,G7,G8) Q=[1 0 0;2 1 6;3 2 7;4 3 8;5 4 0;6 5 0;7 4 0;8 0 0;]; INPUTS1=1; OUTPUTS=5; Ga=connect(Sys,Q,INPUTS1,OUTPUTS) INPUTS2=8; OUTPUTS=5; Gb=connect(Sys,Q,INPUTS2,OUTPUTS) rlocus(Ga)
计算机控制技术课程设计 业:自动化 班级:动201xxx 姓名:xxx 学号:2013xxxxxx 指导教师:xxx 兰州交通大学自动化与电气工程学院 2016 年 07 月 15 日
水箱液位控制系统设计 1设计目的 通过课程设计使学生掌握如何应用微型计算机结合自动控制理论中的各种控制算法构成一个完整的闭环控制系统的原理和方法;掌握工业控制中典型闭环控制系统的硬件部分的构成、工作原理及其设计方法;掌握控制系统中典型算法的程序设计方法;掌握测控对象参数检测方法、变送器的功能、执行器和调节阀的功能、过程控制仪表的PID控制参数整定方法,进一步加强对课堂理论知识的理解与综合应用能力,进而提高解决实际工程问题的能力。 2 设计要求 设计双容水箱液位控制系统,由水泵1、2分别通过支路1、2向上水箱注水,在支路一中设置调节阀,为保持下水箱液位恒定,支路二则通过变频器对下水箱液位施加干扰。设计串级控制系统以维持下水箱液位的恒定,双容水箱液位控制系统示意图如下图1所示。 图1 双容水箱液位控制系统示意图 3 设计方法 为保持水箱液位的稳定,设计中采用闭环系统,将下水箱液位信号经水位检测器送至控制器(PID),控制器将实际水位与设定值相比较,产生输出信号作用于执行器(控制阀),从而改变流量调节水位。当对象是单水箱时,通过不断调整PID参数,单闭环控制系统理论上可以达到比较好的效果,系统也将有较好的抗干扰能力。该设计对象属于双水箱系统,整个对象控制通道相对较长,如果采用单闭环控制系统,当上水箱有干扰时,此干扰经过控制通路传递到下水箱,会有很大的延迟,进而使控制器响应滞后,影响控制效果,在实际生产中,如果干扰频繁出现,无论如何调整PID参数,都将无法得到满意的效果。考虑到串级控制可以使某些主要干扰提前被发现,及早控制,在内环引入负反馈,检测上水箱液位,将液位信号送至副控制器,然后直接作用于控制阀,以此得到较好的控制效果。 4设计方案及原理 系统功能介绍 整个过程控制系统由控制器,执行器,测量变送,被控对象组成,在本次控制系统中控制器为单片机,采用算法为PID控制规律,执行器为电磁阀,采样采用A/D芯片,测量变送器为A,被控对象为流量B。整个控制过程,当系统受到扰
计算机科学与技术04级 微机原理课程设计 一、课程设计的目的 课程设计是实验的提高和综合。通常,学习知识是由浅入深、由此及彼,一点点的学习和积累的,而应用知识则是综合运用所积累的知识来分析和解决实际问题、从知识的系统性来检验对各层次知识的掌握程度。 ?课程设计的目的是让学生把理论学习和实验教学阶段所掌握的知识通过一个设计实例,经历一次理论和实践结合、软件和硬件结合的综合训练,也是一次工程实践能力的检验。这次课程设计大家应当把它作为毕业设计的预演。 ?锻炼通过各种媒体和途径主动获取知识的能力。 二、课程设计的要求 ?课程设计要求独立完成、严禁抄袭; ?较大的题目可以多人合作完成,但每个人都应有自己所承担的任务,并在自己的报告中客观如实地反映; ?课程设计既是综合能力的锻炼,也是协作精神和科学诚信品质的锻炼。如果做相同的题目,要保证各自的独立性,实现方法的多样性。 ?微机原理是一门硬件技术为主、软硬件结合的课程,因此要求,所有的选题都要描述清楚硬件设计的原理和软件设计的逻辑思路。设计尽量在实验箱上完成。 ?在功能设计上尽量完善、贴近实用、有人机交互(人机交互可实用实验箱上的键盘重新定义) ?登录本系的网页,查阅毕业设计的相关文件和设计规范,学习设计报告撰写的各个环节,并在课程设计中认真实践。 ?要珍惜这次课程设计,这是一次总结复习、知识拓展、能力锻炼的大好机会。 ?课题完成后要有一分规范的设计报告。 三、课程设计的时间安排 课程设计的时间为2个完整的教学周。每天的上午一班,下午二班实验室开放,为大家提供调试、辅导的时间。 四、课程设计报告要求 ?为锻炼学生的论文写作能力,为今后的毕业设计(毕业论文)做准备,对设计报告的完成尝试做较高的要求。
电气控制技术课程设计任务书 一、设计课目:基于PLC的C650型车床控制系统设计 二、系统组成 车床是机械加工业中应用最为广泛的一种机床约占机床总数的25%~50%。车床可以用来切削各种的外圆、内孔、螺纹和端面,还可以安装钻头或绞刀等进行钻孔、绞孔等项加工。C650型卧式车床属中型车床,加工工件回转半径最大可达1020m m,长度可达3000mm。其结构如图所示,主要由车身、主轴变速箱、进给箱、溜板箱、刀架、尾架、丝杆和光杆等部分组成。 普通车床结构图 车床的切削加工包括主运动、进给运动和辅助运动三部分。 1、主运动是工件作旋转运动,也就是产生车削的运动。主轴转动带动装夹在其端头的工件转动。
2、进给运动是刀具作直线运动,也就是使切削能连续进行下去的运动。刀具安装在刀架上,与滑板一起随溜板箱沿主轴轴线方向实现进给移动。主轴的传动和溜板箱的移动均由主电动机驱动,并通过各自的变速箱调节主轴转速进给速度。当加工的工件比较大时其转动惯量也比较大,停车时不易立即停止转动,必须有停车制动的功能,较好的停车制动是采用电气制动。 3、为减轻工人的劳动强度和节省辅助工作时间,要求带动刀架移动的溜板箱能够快速移动(辅助运动)。在加工的过程中,还需提供切削液(冷却液)。 采用一台不变速的异步电动机拖动,实现切削主运动和刀具进给运动,其变速由变速齿轮箱通过手柄操作进行切换来实现的有级调速。采用一台电动机单独驱动刀架的快速移动;采用一台电动机单独驱动冷却泵和液压泵。 三、控制要求 1、主电动机M1,完成主轴主运动和刀具进给运动的驱动,电动机采用直接起动,可正反两个方向旋转(反转控制主要用于加工螺纹时,要求反转退刀),并可进行正反两个旋转方向的电气停车制动。为加工调整方便,还具有正向点动功能。 2、电动机M2拖动冷却泵,在加工时提供切削液,采用直接起动停止方式,并且为连续工作状态。 3、快速移动电动机M3,电动机可根据使用需要,随时手动控制起、停。
目录
一、设计背景及意义 当今,红绿灯安装在个个道口上,已经成为疏导交通车辆最常见和最有效的手段。单片机具有性价比高、集成度高、可靠性好、抗干扰性强等特点,广泛运用于各种智能仪器中。基于新型规则的可编程交通控制系统,可以实现对车辆、行人的控制,使的交通便于管理。所以,采用单片机自动控制交通灯有现实的社会意义。 二、设计任务 1. 采用AT89C51芯片; 2. 使用发光二极管(红,黄,绿)代表各个路口的交通灯; 3. 用8段数码管对转换时间进行倒时; 4、带紧急按钮功能,当紧急按钮按下时,所有方向均亮起红灯; 5. 控制程序采用C语言编程。 三、控制系统设计原理 3.1 设计思路 利用单片机实现交通灯的控制,该任务分以下几个方面: a、实现红、绿、黄灯的循环控制。要实现此功能需要表示三种不同颜色的LED灯分别接在P1个管脚,用软件实现。 b、用数码管显示倒计时。可以利用动态显示或静态显示,串行并出或者并行并出实现。 c、紧急状况功能。这需要人工实现,编程时利用到中断才能带到目的,只要有按钮按下,那么四个方向全部显示红灯,禁止车辆通行。当情况解除(再次按下按钮),重新回到初始状态。
3.2 总体设计图 图1 3.2.1 交通灯循环控制 使用AT89C51单片机完成对十字路口交通灯的控制,十字路口的工作过程分为东西方向和南北方向两个干道的红绿黄灯工作状态(红灯亮表示禁止通行,绿灯亮表示允许通行,黄灯亮表示提醒红绿灯之间状态的切换)的控制,每个工作状态的时间设为40s,采用循环的控制方式,具体控制过程如下(如图2):1、系统工作开始后,首先进入初始设定阶段,东西方向亮红灯,南北方向亮绿灯; 2、进入状态1的倒计时阶段,东西方向的红灯开始40s倒计时,南北方向绿灯开始35s倒计时; 3、进入状态1过渡阶段,东西方向红灯开始最后5s倒计时,南北方向黄灯亮并开始5s倒计时; 4、过渡阶段1完成后,东西方向亮绿灯,南北方向亮红灯; 5、进入状态2的倒计时阶段,南北方向的红灯开始40s倒计时,东西方向绿灯开始35s倒计时; 6、进入状态2过渡阶段,南北方向红灯开始最后5s倒计时,东西方向黄灯亮并开始5s倒计时; 7、过渡阶段2完成后,进入状态1,开始循环。 图2
微机原理与系统设计作为电子信息类本科生教学的主要基础课之一,课程紧密结合电子信息类的专业特点,围绕微型计算机原理和应用主题,以下是整理的微机课程设计心得体会范文。 微机课程设计心得体会范文一 微机原理与系统设计作为电子信息类本科生教学的主要基础课之一,课程紧密结合电子信息类的专业特点,围绕微型计算机原理和应用主题,以CPU为主线,系统介绍微型计算机的基本知识,基本组成,体系结构和工作模式,从而使学生能较清楚地了解微机的结构与工作流程,建立起系统的概念。 这次微机原理课程设计历时两个星期,在整整两星期的日子里,可以说得是苦多于甜,但是可以学到很多很多的的东西,同时不仅可以巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。以前在上课的时候,老师经常强调在写一个程序的时候,一定要事先把程序原理方框图化出来,但是我开始总觉得这样做没必要,很浪费时间。但是,这次课程设计完全改变了我以前的那种错误的认识,以前我接触的那些程序都是很短、很基础的,但是在课程设计中碰到的那些需要很多代码才能完成的任务,画程序方框图是很有必要的。因为通过程序方框图,在做设计的过程中,我们每一步要做什么,每一步要完成什么任务都有一个很清楚的思路,而且在程序测试的过程中也有利于查错。 其次,以前对于编程工具的使用还处于一知半解的状态上,但是经过一段上机的实践,对于怎么去排错、查错,怎么去看每一步的运行结果,怎么去了解每个寄存器的内容以确保程序的正确性上都有了很大程度的提高。 通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计的过程中遇到问题,可以说得是困难重重,这毕竟第一次做的,难免会遇到过各种各样的问题,同时在设计的过程中发现了自己的不足之处,对以前所学过的知识理解得不够深刻,掌握得不够牢固。 这次课程设计终于顺利完成了,在设计中遇到了很多编程问题,最后在赵老师的辛勤指导下,终于游逆而解。同时,在赵老师的身上我学得到很多实用的知识,在次我表示感谢!同时,对给过我帮助的所有同学和各位指导老师再次表示忠心的感谢! 微机课程设计心得体会范文二 以前从没有学过关于汇编语言的知识,起初学起来感觉很有难度。当知道要做课程设计的时候心里面感觉有些害怕和担心,担心自己不
课程设计任务书 2013—2014学年第二学期 机械工程学院(系、部)机械设计制造及其自动化专业机设1105 班级课程名称:机床电气控制技术 设计题目:压力机液压系统的电气控制设计 完成期限:自 2014 年 6 月 13 日至 2014 年 6 月 20 日共 1 周 内容及任务一、设计的主要技术参数 具体要求见课程设计指导书 二、设计任务 完成系统的继电器控制原理图、PLC控制原理图及设计说明书一份三、设计工作量 电气图2-3张,不得少于15页 进度安排 起止日期工作内容 6.13 讲解设计目的、要求、方法,任务分工 6.14 根据指导书和任务书要求确定控制系统的输入输出点 数、类型,确定输入、输出设备及元器件种类、数量, 初步选定PLC型号 6.15 根据指导书和任务书绘制控制系统工作流程图,确定每 个动作实现和解除必须的条件 6.16-6.17 绘制继电器控制原理图、电路计算、元器件选择列表 编制控制系统的PLC控制程序 6.18-6.20 编写设计说明书 主 要参考资料【1】郁建平主编《机电控制技术》. 北京:科学出版社,2006. 【2】张万奎主编《机床电气控制技术》. 北京:中国林业出版社,2006. 【3】李伟主编《机床电器与PLC》. 西安:西安电子科技大学出版社,2006. 【4】芮静康主编《实用机床电路图集》. 北京:中国水利水电出版社,2006. 指导教师(签字): 2014年 6 月 20 日系(教研室)主任(签字): 2014年 6 月 20 日
机床电气控制技术 设计说明书 压力机液压系统的电气控制设计 起止日期:2014 年6 月13 日至2014 年6 月20 日学生姓名邓文强 班级机设1105 学号11405701424 成绩 指导教师(签字) 机械工程学院(部) 2014年6月20日