第一章常见报警的解释
上图中368报警以及相关编码器报警的原因有:
(1)电机后而的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。尤其是偶然的编码器方而的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:
(1)把此电机上的编码器跟其他电机上的冋型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
(2)把伺服放大器跟苴同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏, 所以最好先确认反馈电缆是否正常。
4 4 3 X 4 4 3 Y 4 4 3 Z 4 4 3 A 6 1 0
X 6 1 0
Y 6 1
Z 6 1 0 A
:CNV. :CNV. :CNV. :CNV. :CNV. :CNV. :CNV. :CNV. COOL ING COOL ING COOL ING COOL ING COOL ING COOL ING COOL ING COOL ING
FAN FAN FAN FAN FAN FAN FAN FAN FAILURE FAILURE
FAILURE FAILURE
FAILURE FAILURE FAILURE FAILURE IN
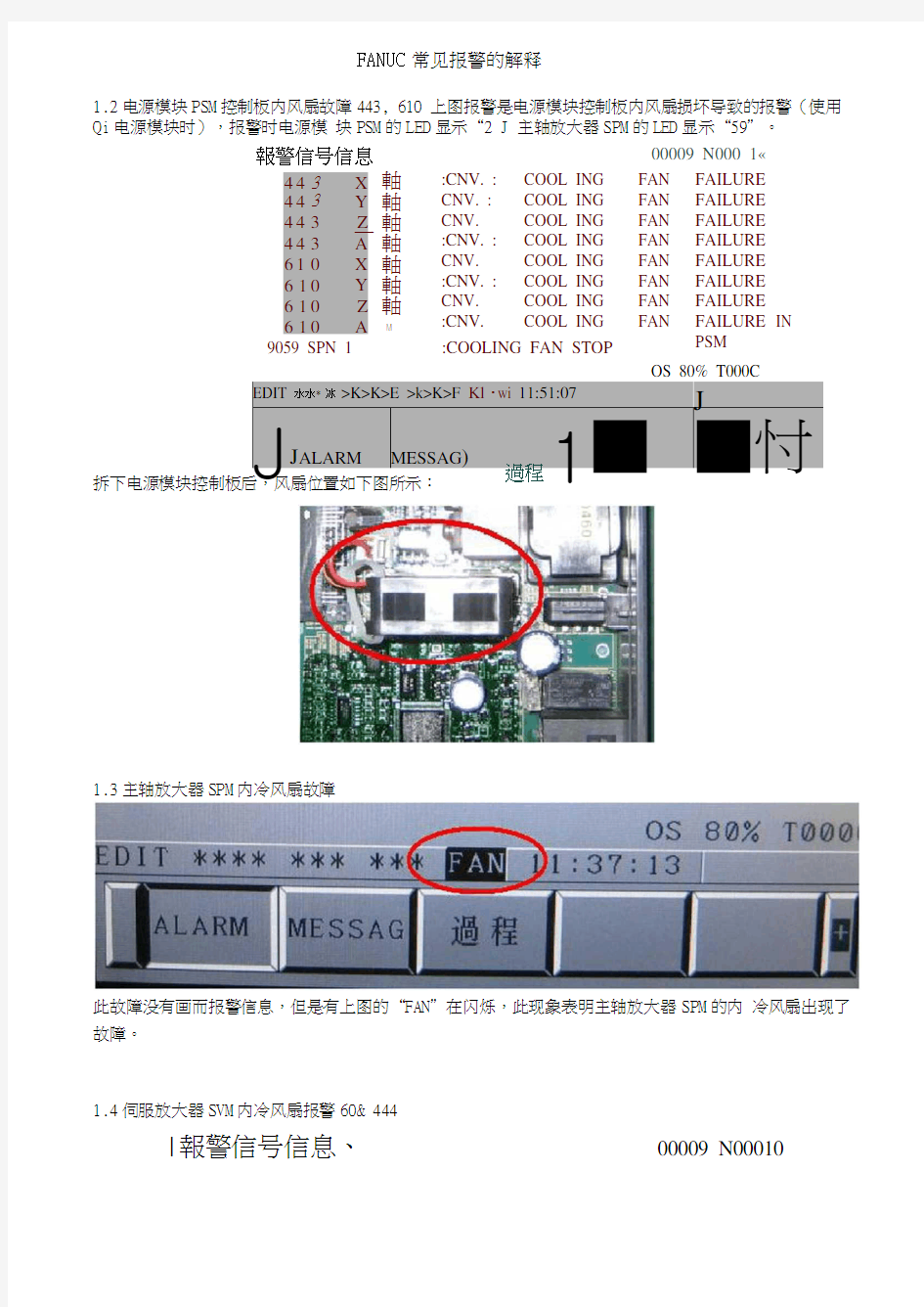
PSM 1.2电源模块PSM 控制板内风扇故障443, 610 上图报警是电源模块控制板内风扇损坏导致的报警(使用Qi 电源模块时),报警时电源模 块PSM 的LED 显示“2 J 主轴放大器SPM 的LED 显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:
1.3主轴放大器SPM 内冷风扇故障
此故障没有画而报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM 的内 冷风扇出现了故障。
1.4伺服放大器SVM 内冷风扇报警60& 444
|報警信号信息、
00009 N00010
報警信号信息
00009 N000 1? 軸軸軸
軸軸軸軸M
一9059 SPN 1
:COOLING FAN STOP
100
可写入参数
444 Z 軸 :INV. COOLING FAN FAILURE 444 A 軸 :INV. COOLING FAN FAILURE 608 Z 軸 :INV. COOLING
FAN FAILURE 608
A 軸 :INV.
COOLING FAN
FAILURE
上图中的报警表示伺服放大器SVM 的内冷风扇出现了故障(Z 轴和A 轴同时出现报警是因为 Z 轴和A 轴是同一个放大器控制的)。上图中的报警出现时对应的伺服放大器上的LED 显示 “ 1 ” 丄 O
1.5
上图中:
(1) 主轴放大器内冷风扇的安装位垃 (2) 伺服放大器内冷风扇的安装位置
(3) 主轴放大器的型号A06B-6111-H XXXSH550 (后而带的都是主轴放大器) (4) 伺服放大器的型号A06-6114-HXXX 注:
(1) 不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。
(2) 导致放大器侧风扇故障的原因主要是因为客户现场工作环境较差,致使风扇上粘有 油污,使风扇
转动时的阻力加大甚至粘住风扇叶片从而导致风扇线圈烧坏。所以在 日常维护过程中要注意保持机床电气柜的密封和淸洁。
2
FAF
—药皿" nRxinun
OUTPUT not race
主轴放大器和伺服放大器的内冷风扇位置
FANUC
HAW ? nun ouVFi ■iHEb ouYpyr
1.6主轴传感器的报警9073 (串行主轴错误)
#9073报警时主轴放大器SPM的LED显示“73”,是由于主轴电机的传感器信号不正常引起。引起报警的原因可能是主轴放大器、主轴电机传感器和传感器的反馈电缆3个方面的故障。
1.7主轴和伺服的报警750, 5136
100 可写入参数
750 SPINDLE SERIAL LINK ERROR
5136 FSSB:NUMBER OF AMPS IS SMALL
OS 80% T0000
如果开机出现以上报警。一般是电源模块、主轴放大器、伺服放大器的LED都无显示。请检査电源模块PSM的CX1A插头是否有200V输入,如果200V输入正常,更换电源模块PSM的控制板。
1.8 5136的报警(伺服放大器故障)
報警信号信息00009 FJ00010 100 可写入参数
5136 FSSB:NUMBER OF AMPS IS SMALL
____ OS 80% T0000 EDIT **** *** *** 12:37:48
如果出现5136报警:
(1)检查每个伺服放大器SVM的控制电源24V是否正常,LED是否有显示,如果LED没有显示而24V 电源输入正常,判断伺服放大器有故障。
(2)如果LED有显示,检查FSSB光缆接口 COP10A和COP10B靠下的一个光口是否发光,如果不发光可以判断是放大器有故障。
(3)检査连接伺服放大器和系统轴卡的FSSB光缆是否有故障。(检查的办法是用手电筒照光缆的一头,如果另一头的2个光口都有光发出确认光缆正常,否则不正常)。
(4)确认参数是否有更改,恢复机床的原始参数。
1.9 401的报警
1.10 926的系统报警
報警 信号信 息
00009 N0000
100 401 可写入参数
軸
VRDY OFF SERVO
:X 40 1 SERVO :Y
VRDY OFF 401 SERVO
:z 軸 VRDY
OFF 401
SERVO
:A
軸
VRDY OFF
0S 80% T0000
如上图,如果所有轴都岀现401报警,检査电源模块PSH 的插头CX3(MCC 控制信号)和CX4 (外部急停
*ESP )是否正常。请参考上而a i 放大器连接中对CX3和CX4连接的详细左义。
正常时CX4的2个接线点应该导通(也就是2个接线点都有24V 电压)。如果CX3和CX4 外部接线正常,检査电源模块PSM 本身或主轴放大器和伺服放大器是否有故障。
第一章常见报警的解释 1.1 368报警(串行数据错误) 上图中368报警以及相关编码器报警的原因有: (1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。 (2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。 (3)伺服放大器的控制侧电路板损坏。 解决方案: (1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。 (2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏, 所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443 , 610 00009 N000 443 443 X軸Y 軸車 由軸 軸軸 軸軸 Z A X Y Z A CNV. COOLING CNV. COOL ING CNw COOLING CNV. COOL I NG CMV. COOL TNG CNV. COOL TNG CNV. COOL ING CNCOOL ING COOLIMG FAN FAN FAILURE FAN FAILURE FAN FA 1 LURE FAN FA I LURE FAN FA T LURE FAN FAILURE FAJM FAILURE FAN FA 1 LURE STOP I N PSM EDIT * * * * 狀** *** 桦■叫 1 1 :51 :0 7L J IALARM?ΛESSAG∣過程y 9059SPN 1 上图报警是电源模块控制板内风扇损坏导致的报警(使用α i电源模块时),报警时电源模块PSM的LED显示2 ”,主轴放大器SPM的LED显示59 ”。 拆下电源模块控制板后,风扇位置如下图所示: 1.3 主轴放大器SPM内冷风扇故障
大唐LTE站点告警处理指导手册
1、小区退服 ?? ?告警解释:故障小区业务全阻,不能提供任何服务 可能原因: 1、射频单元不在位; 2、辅光口故障; 3、人为去激活小区; 4、GPS 故障; 5、传输故障; 6、基带板故障。 处理步骤: 1、查找故障站点; 2、查看承建故障小区的射频单元是否在位,物理设备-射频单元拓扑,如下图,一般 情况小区1~3分别建立在射频单元拓扑0~2上。
射频单元不在位告警处理方法: (1)远程确认现场供电是否正常; (2)近端更换光模块观察告警是否恢复; (3)近端更换光纤观察告警是否清除; (4)近端更换RRU观察告警是否清除。 请参考“射频单元不在位告警”处理方法 故障告警依然没有恢复,请联系大唐工程师。 如果射频单元存在,则转步骤3处理; 3、查看承载小区射频单元接入BBU 的光口信息,如下图,射频单元0 接入基站板卡 槽位号为4,射频单元光口1接入板卡光口号为0,射频单元光口2(辅光口)接入板卡光口号为1; 查看光模块光口信号,位置物理设备-机架-机框-板卡-光模块,如果对应光模块的光口信号丢失状态为丢信号,请参考“BBU Ir 光链路光信号丢失告警”处理方法; 如果没有丢信号,则转步骤4处理; 4、请查看操作记录,确认人为去激活小区原因;如果不是人为去激活,则转步骤5 处理; 5、查看基站GPS工作状态是否正常,位置物理设备-时钟信息-当前时钟,如果当前 时钟不是锁定状态,请参考“GPS 告警”处理方法,如果当前时钟是锁定状态,转步骤6处理;
6、查看传输链路信息是否正常,如果链路公共信息是故障,请参考“S1链路断开告 警”处理方法。 故障告警依然没有恢复,请联系大唐工程师。 2、基站退服 ?? ?告警解释:基站所有小区业务全阻,不能提供任何服务 可能原因: 1、传输故障 2、时钟故障 3、基带板卡退服 即所有小区退服后,上报基站退服告警。 处理方法: 1、查找故障站点; 2、查看基站传输链路是否故障如下图,传输管理-SCTP 链路,如果SCTP链路建立 状态不是与对端建立成功,运行状态为故障,请参考“S1链路断开告警”处理方法; 如果传输链路运行正常,转步骤3处理;
A 报警列表 A.1 报警列表(CNC) (381) (1) 与程序操作相关的报警(PS报警) (381) (2) 与后台编辑相关的报警(BG报警) (381) (3) 与通讯相关的报警(SR报警) (381) (4) 参数写入状态下的报警(SW报警) (401) (5) 伺服报警(SV报警) (401) (6) 与超程相关的报警(OT报警) (405) (7) 与存储器文件相关的报警(IO报警) (405) (8) 请求切断电源的报警(PW报警) (406) (9) 与主轴相关的报警(SP报警) (406) (10) 过热报警(OH报警) (408) (11) 其他报警(DS报警) (408) (12) 与误动作防止功能相关的报警(IE报警) (410) A.2 报警列表(PMC) (411) A.2.1 显示在PMC报警画面的信息 (411) A.2.2 PMC系统报警信息 (414) A.2.3 操作错误 (415) A.2.4 I/O通信错误 (423) A.3 报警列表(串行主轴) (426) A.4 错误代码列表(串行主轴) (431) A.1 报警列表(CNC) (1) 与程序操作相关的报警(PS报警) (2) 与后台编辑相关的报警(BG报警) (3) 与通讯相关的报警(SR报警) 这些报警种类的报警号为公用的编号。 根据报警的状态,以 PS“报警号”例)PS0003 BG“报警号”例)BG0085 SR“报警号”例)SR0001 的方式予以显示。 报警号信息内容 0001 TH错误输入设备的读入过程中检测出了TH错误。 引起TH错误的读入代码和是从程序段数起的第几 个字符,可通过诊断画面进行确认。 0002 TV校验错误在单程序段的TV检测中检测出了错误。 通过将参数TVC(No.0000#0)设定为0可以使系统 不进行TV检测。 0003 数位太多指定了比NC指令的字更多的允许位数。此允许位 数根据功能和地址而有所不同。 0004 未找到地址 NC语句的地址+数值不属于字格式。 或者在用户宏程序中没有保留字、或不符合句法时 也会发出此报警。 0005 地址后无数据不是NC语句的地址+数值的字格式。 或者用户宏程序中没有保留字、或不符合句法时会 发出此报警。 0006 负号使用非法在NC指令的字、系统变量中指定了负号。 0007 小数点使用非法在不允许使用小数点的地址中指定了小数点。或者 指定了2个或更多个小数点。
中国铁塔动环常见告警处理指导手册一、FSU离线告警 告警名称:FSU离线; 告警解释:FSU和铁塔集团平台连接通讯中断; 原因分析:1)信号差或不稳定;2)FSU设备掉电;3)无线模块硬件故障;4)FSU设备硬件故障;5)天线和无线模块连接中断,或天线丢失;6)VPN服务器连接不上;7)SIM卡被盗、欠费或故障。平台处理方法:查询历史告警记录,如频繁离线或长时间离线,需现场检查。 现场处理方法: 第一步检查供电: 1)在运维监控系统检查离线站点是否有停电告警,判断是否现场停电; 2)现场检查FSU指示灯不亮设备没有供电。 原因分析:FSU供电异常。 解决方案: 1)检查整个基站是否停电,如停电则通知相关人员取电; 2)检查FSU供电空开是否跳闸及通电线路是否正常。 第二步检查无线模块: 检查无线模块指示灯都不亮或都常亮。
原因分析:无线模块供电异常或无线模块故障。 解决方案: 1)无线模块供电故障,则检查给无线模块供电接线是否正常如正常,则用万用表测量给无线模块供电FSU输出端是否有12V,如没有则为FSU供电板问题,更换FSU供电板。 2)确认供电正常,则更换无线模块进行测试。 下站建议:下站时建议随身带上一套可以成功拨号的无线网卡和SIM 卡,下站的时候作对比验证,快速确认是SIM卡问题,还是无线模块问题。 第三步FSU检查 通过EISUConfig软件登陆FSU设备,点击设备诊断管理。 1)信号强度弱:通过设备软件登录设备,如信号强度小于15。
解决方案:更换运营商无线模块或将天线外延(室内站放到室外,室外柜放到底部隐蔽区域或有外层保护情况下放到机柜顶部) 2)铁塔VPN网络连接异常:铁塔VPN网络提示连接异常 3)铁塔网管未注册:铁塔网管提示连接异常(正常显示连接正常)解决方案: 确认总部平台正常,重启FSU(等待程序连接)。如重启后未恢复,联系厂家专业人员。 平台恢复确认:告警管理-活动告警监控-当前告警查询该站点,确认告警是否消除。 二、电源配套告警 2.1开关电源类告警: 2.1.1开关电源通信状态告警 告警名称:开关电源通信状态告警; 告警解释:开关电源和FSU之间的通讯中断; 原因分析:开关电源和FSU之间的通讯中断 平台处理方法:无 现场处理方法:检查开关电源屏幕是否显示正常,和FSU的监控线连接是否正常。
FANUC 0i系统常见有报警信息的故障排除 ??? FANUC 0i数控系统具有较强的自诊断功能,对于一些常见的故障,通过报警信息,对应维修说明书,能够解决许多问题。下面介绍几个常见报警故障的处理方法。 1、500好报警(超行程报警)的排除方法 在数控机床操作的过程中超行程报警经常出现,由于惯性的原因,当移动轴压下行程开关时,需减速停止,同时,系统出现500号报警,并同时显示报警信息为过行程及过行程的坐标轴。 下面是解除“500 过行程:+X”报警的基本步骤: 1)进给轴选择旋钮拨到“X”轴处; 2)进给倍率选择旋钮拨到“× 1”处; 3)旋转手摇脉冲发生器使X轴向负方向移动,离开极限位置; 4)按下MDI键盘上的“RESET”键,报警信息消失。 2、90号报警(返回参考点位置异常)的排除方法 报警条件:当返回参考点位置偏差过大或CNC没有收到伺服电机编码器转信号,出现90号报警。 解除步骤: 1)确认DGN.300中的值(允许位置偏差量)大于128。否则提高进给速度,改变倍率。2)确认电机回转是否大于1转。小于1转,说明返回的起始位置过近。调整到远一些。 3)确认编码器的电压是否大于4.75V(拆下电机后罩,测编码器印制板的+5――0V),如果低于4.75V,更换电池。 4)如果不是上述问题,一定是硬件出了问题:更换编码器。 3、401号报警(伺服准备信号报警) 报警条件:伺服放大器的准备信号(VRDY)没有接通,或者运行时信号关断。 解除步骤: 1)PSM控制电源是否接通;
2)急停是否解除; 3)最后的放大器JX1B插头上是否有终端插头; 4)MCC是否接通,如果除了PSM连接的MCC外,还有外部MCC顺序电路,同样要检查。 5)驱动MCC的电源是否接通; 6)断路器是否接通; 7)PSM或SPM是否发生报警。 如果伺服放大器周围的强电电路没有问题,更换伺服放大器;如果以上措施都不能解决问题,更换主轴控制卡。 ------------------------------------------ FANUC 0i系统常见无报警信息的故障排除 1、诊断功能的使用 数控系统发生故障后,如无报警信息,通过系统的诊断画面进行故障判断。系统的诊断画面在机床出现异常时,诊断功能提供的报警信号和监控数据为故障判断提供了判断的依据。 ????? 调出诊断画面的操作方法如下: 诊断号的注释见附录2 2、利用诊断功能诊断故障 如何有效地使用诊断功能提供的诊断信息来帮助查找和排除故障呢?这一定是我们最为关注的问题。接着来学习如何使用诊断功能去解决一些在实际中经常出现的一些隐性故障。 (1)诊断号000为1时,表明系统正在执行辅助功能(M指令)。在辅助功能的执行过程中,000号将会保持为1,直到辅助功能执行完了信号到达为止。因此,当出现辅助功能执行时间超出正常值时,可能是辅助功能的条件未满足。所以出现无报警的异常,查找故障点时,若诊断号000为1,可以首先检查辅助功能所要完成的机床动作是否已经完成。 故障现象:一数控机床在自动运行状态中,每当执行M8(切削液喷淋)这一辅助功能指令时,加工程序就不再往下执行了。此时,管道是有切削液喷出的,系统无任何报警提示。
以上这些告警维护信号产生机理的简要说明如下: ●ITU-T建议规定了各告警信号的含义: ●LOS:信号丢失,输入无光功率、光功率过低、光功率过高,使BER劣于10-3。 ●OOF:帧失步,搜索不到A1、A2字节时间超过625μs 。 ●LOF:帧丢失,OOF持续3ms以上。 ●RS-BBE:再生段背景误码块,B1校验到再生段——STM-N的误码块。 ●MS-AIS:复用段告警指示信号,K2[6 —8]=111超过3帧。 ●MS-RDI:复用段远端劣化指示,对端检测到MS-AIS、MS-EXC,由K2[6 - 8]回发过来。 ●MS-REI:复用段远端误码指示,由对端通过M1字节回发由B2检测出的复用段误块数。 ●MS-BBE:复用段背景误码块,由B2检测。 ●MS-EXC:复用段误码过量,由B2检测。 ●AU-AIS:管理单元告警指示信号,整个AU为全“1”(包括AU-PTR)。 ●AU-LOP:管理单元指针丢失,连续8帧收到无效指针或NDF。 ●HP-RDI:高阶通道远端劣化指示,收到HP-TIM、HP-SLM。 ●HP-REI:高阶通道远端误码指示,回送给发端由收端B3字节检测出的误块数。 ●HP-BBE:高阶通道背景误码块,显示本端由B3字节检测出的误块数。 ●HP-TIM:高阶通道踪迹字节失配,J1应收和实际所收的不一致。 ●HP-SLM:高阶通道信号标记失配,C2应收和实际所收的不一致。 ●HP-UNEQ:高阶通道未装载,C2=00H超过了5帧。 ●TU-AIS:支路单元告警指示信号,整个TU为全“1”(包括TU指针)。 ●TU-LOP:支路单元指针丢失,连续8帧收到无效指针或NDF。 ●TU-LOM:支路单元复帧丢失,H4连续2—10帧不等于复帧次序或无效的H4值。 ●LP-RDI:低阶通道远端劣化指示,接收到TU-AIS或LP-SLM、LP-TIM。 ●LP-REI:低阶通道远端误码指示,由V5[1 —2]检测。 ●LP-TIM:低阶通道踪迹字节失配,由J2检测。 ●LP-SLM:低阶通道信号标记字节适配,由V5[5 —7]检测。 ●LP-UNEQ:低阶通道未装载,V5[5 —7]=000超过了5帧。 为了理顺这些告警维护信号的内在关系,我们在下面列出了两个告警流程图。 图4-13是简明的TU-AIS告警产生流程图。TU-AIS在维护设备时会经常碰到,通过图4-13分析,就可以方便的定位TU-AIS及其它相关告警的故障点和原因。
FANUC 0i系统故障报警信息 [ 内容简介] 总结本次故障,虽然在报警信号信息屏幕上所显示的是系统报警,给人的第一感觉就是数控系统出现问题了,但不是绝对都是这样的,这个故障就是一个例外,这实质上是一个外围故障。 1、报警信息的查看方法 数控系统可对其本身以及其相连的各种设备进行实时的自诊断。当数控机床出现不能保证正常运行的状态或异常都可以通过数控系统强大的功能,对其数控系统自身及所连接的各种设备进行实时的自诊断。当数控机床出现不能满足保证正常运行的状态或异常时,数控系统就会报警,并将在屏幕中显示相关的报警信息及处理方法。这样,就可以根据屏幕上显示的内容采取相应的措施。 一般情况下,系统出现报警时,屏幕显示就会跳转到报警显示屏幕,显示出报警信息,如图所示:
某些情况下,出现故障报警时,不会直接跳转到报警显示屏幕,如图所示: FANUC 0i数控系统提供了报警履历显示功能,其最多可存储并在屏幕上显示的50个最近出现的报警信息。大大方便了对机床故障的跟踪和统计工作。显示报警履历的操作如下:
2、FANUC 0i数控系统报警的分类 FANUC 0i数控系统的报警信息很多,可以归纳为以下类别,便于查找。 表7.1FANUC 0i数控系统报警分类 3、常见报警的故障排除思路 数控机床是当代高新技术机、电、光、气一体化的结晶,电气复杂,管路交叉林立,故障现象也是千奇百怪,各不相同。如何能
迅速找出故障、隐患,并及时排除?这是数控机床维修人员所面临的最现实、最直接的问题。 在这里,我们将以最常碰到的故障为例,学习使用FANUC 0i 数控系统提供的丰富的维修功能进行故障排除的方法。为方便起见,把由机床厂家根据不同的机床结构所可以预见的异常情况汇总后,由机床厂家自己编写错误代码和报警信息,这类故障称为外围报警(这是相对于数控系统而言)。也就是说不同结构类型的机床就会有不同的外部故障的错误代码和报警信息。而由数控系统生产厂家根据数控系统部件所能预见的异常情况汇总后,所编写的错误代码和报警信息,这类故障称为系统报警(数控系统故障)。数控系统故障的错误代码和报警信息不会因不同结构类型的机床而改变,不同型号的数控系统的系统报警可能会有所不同。系统报警是数控系统生产厂家在数控系统传递到机床厂家之前就编写好的,是固定不变的,机床厂家没法对其进行编辑和增删。 在一般情况下,外围故障的发生机率较系统故障的机率要高。不同结构类型的机床就会有不同的外围故障,而若要能够做到对外围故障做出快速准确的定位和排除,就必须对你所要维修的机床的机械结构、电气原理、数控系统、各个机床动作、操作方法有一个全面的认识。若在机床正常的时候,对机床的每一个动作进行仔细的观察,便能够在机床异常(也就是说机床动作不能正常进行)时,根据平时观察所得与之对比,从而做到对故障的快速诊断与排除。与此同时,高效地使用FANUC 0i系统提供的丰富的维修功能,包
诺基亚设备告警代码的含义翻译
诺基亚设备告警代码的含义翻译告警号星级网优级别告警描述告警解释及处理建议 7523 ** 2 TRX TEMPERATURE DANGEROUSLY HIGH TRX 单元中的温度高于80 摄氏度(必须关闭 TX 电源以防止组件损坏) 7524 ** 2 TX FREQUENCY TUNER OUT OF ORDER 某个TX 锁相合成器(PLLI 或PLL2 )出现故 障 7525 ** 2 TX MAIN FREQUENCY TUNER OUT OF ORDER TRX 参考频率合成器未锁 7526 ** 2 RX FREQUENCY TUNER OUT OF ORDER 某个RX 锁相合成器出现故障 7527 ** 2 RX MAIN FREQUENCY TUNER OUT OF ORDER RX 参考频率合成器未锁(PLL3 ) 7528 ** 3 TEST LOOP TUNING OUT OF ORDER TRX 环路合成器未锁并可能发生故障 7529 ** 2 RECEIVER FAULT 该告警表示某个RX 模块合成器中有故障 7530 ** 2 TX OUTPUT POWER LEVEL DECREASED 因为RFU 中的HW 发生故障,TX 功率电平 低于给定的值(发射功率电平下降) 7531 ** 2 TX OUTPUT POWER LOST 如果发送器
电源的测量指出断电(尽管传输应该是活 的), TRX 软件产生该告警。 7532 ** 2 TRANSMITTER OUT OF CONTROL 如果发送器电源的测量指出有电(尽管传输应该被关闭), TRX 软件产生该告警 7533 ** 2 TX ANTENNA OR COMBINER CONNECTION FAULTY 该告警指出在TRXTX 接口中的SWR 太高,发射天线或合路器连接失败 7535 ** 2 RECEIVING FAULT IN BASEBAND MODULE 使用了分集,则两条EQDSP接收线路都有故障。未使用分集,则一条线路有故障。 7536 ** 2 FAILURE IN MAIN RECEIVING PATH OF BASEBAND MODULE 常用的EQDSP 接收线路有故障(使用分集时出现。否则出现的是告警7535) 7537 * 3 FAILURE IN DIVERSITY RECEIVING PATH OF BASEBAND MODULE EQDSP 分集线路有故障(该告警只在使用了分集的情况下出现) 7538 ** 2 SIGNALLING ERROR IN ABIS INTERFACE Abis接口信令错误(在电信信令信息传输中TRX 发生故障) 7539 ** 2 SIGNALLING ERROR IN DBUS 在内部D 总线信息传输中TRX 发生故障
常用故障代码和故障排除方法 伺服 - 001操作面板紧急停止 SRVO- 001 Operator panel E-stop [现象]按下了操作箱/操作面板的紧急停止按扭。 SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。(注释) [对策1]解除操作箱/操作面板的紧急停止按扭。 [对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。 [对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。逐一更换开关单元或操作面板。 [对策4]更换配电盘。 [对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。 在采取对策6之前,完成控制单元的所有程序和设定内容的备份。 [对策6]更换配电盘。 (注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。(参阅示教操作盘的报警历史画面) 伺服-001操作面板紧急停止 伺服-004栅栏打开 サーボ-007外部紧急停止 伺服-204外部(SVEMG异常)紧急停止 伺服-213保险丝熔断(面板PCB) 伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止 SRVO- 002 Teach pendant E-stop [现象]按下了示教操作盘的紧急停止按扭。 [对策1]解除示教操作盘的紧急停止按扭。 [对策2]更换示教操作盘。 伺服 - 003紧急时自动停机开关 SRVO- 003 Deadman switch released [现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 [对策1]按下紧急时自动停机开关并使机器人操作。 [对策2]更换示教操作盘。 伺服 - 021SRDY断开(组:i轴:j) SRVO- 021 SRDY off (Group:i Axis:j) [现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。(所谓HRDY,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服相对于主机发出伺服放大器是否已经停止的信号。
FANUC交流速度控制单元有多种规格,早期的交流伺服为模拟式,目前一般都使用数字式伺服,在数控机床中,常用的规格型号有以下几种: 1)与FANUC交流伺服电动机AC0、5、10、20M、20、30、30R等配套的模拟式交流速度控制单元。它是FANUC最早的AC伺服产品,速度控制单元采用正弦波PWM控制,大功率晶体管驱动。在结构形式上,可以分单轴独立型、双轴一体型、三轴一体型三种基本结构。单轴独立型速度控制单元,常用的型号有 A06B-6050-H102/H103/H104/H113等;双轴一体型速度控制单元,常用的型号有A06B-6050-H201/H202/H203等;三轴一体型速度控制单元,常用的型号有A06B-6050-H401/H402/H403/H404等,多与FANUC 11、0A、0B等系统配套使用。 2)与FANUC交流S (L、T)系列伺服电动机配套的S (L、C)系列数字式交流伺服驱动器,它是FANUC中期的AC伺服产品,驱动器采用全数字正弦波PWM控制,IGBT驱动。其中,S系列用量最广,规格最全;L 系列只有单轴型结构,常用的型号有A06B-6058-H001-H007/H102/H103等;C系列有单轴型、双轴型两种结构,常用的单轴型有A06B-6066-H002-H006等规格,常用的双轴型有A06B-6066-H222~H224/H233、H234、H244等规格。 作为常用规格,S系列有单轴型、双轴型、三轴型三种结构,常用的单轴型有 A06B-6058-H001~H007/H023/H025等;常用的双轴型有A06B-6058-H221~H231/H251-H253等规格;常用的三轴型有A06B-6058-H331-H334等规格;多与FANUC 0C、11、15系统配套使用。 3)与FANUC α/αC/αM/αL系列伺服电动机配套的FANUC α系列数字式交流伺服驱动器,它是FANUC 当前常用的AC伺服产品,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。FANUC α系列数字式交流速度控制单元有如下两种基本结构形式: ①各驱动公用电源模块(PSM)、伺服驱动单元(SVM)为模块化安装的结构形式,驱动器可以是单轴型、双轴型与三轴型三种结构。常用的单轴型有A06B-6079-H101~H106等,常用的双轴型有 A06B-6079-H201~H208等规格,常用的三轴型有A06B-6079/6080-H301~H307等规格,多与FANUC 0C、15A/B、16A/B、18A、20、21系统配套使用。 ②电源与驱动器一体化(SVU型)的结构形式,各驱动器单元可以独立安装,有单轴型、双轴型两种结构,常用的单轴型有A06B-6089-H10l~H106等规格,常用的双轴型有A06B-6089-H201~H210等规格,多与FANUC 0C、0D、15A/B、16A/B、18A、20、21系统配套使用。 4)与FANUC β系列伺服电动机配套的FANUC β系列数字式交流伺服驱动器,它亦是FANUC当前常用的AC伺服产品,采用电源与驱动器一体化(SVU型)的结构,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。可以使用PWM接口、I/OLink接口,亦可以采用光缆接口。型号为 A06B-6093-H101~H104/H151~H154//H111-H114,多与FANUC 0TD、PM01等经济型数控系统配套使用。 5)与FANUC αi系列伺服电动机配套的FANUCα i系列伺服驱动器是FANUC公司的最新产品,它在FANUC α系列的基础上作了性能改进。产品通过特殊的磁路设计与精密的电流控制以及精密的编码器速度反馈,使转矩波动极小,加速性能优异,可靠性极高。电动机内装有脉冲/转极高精度的编码器,作为速度、位置检测器件,使系统的速度、位置控制达到了极高的精度。 α i系列驱动器由电源模块(PSM)、伺服驱动器(SVM)、主轴驱动器(SPM)等组成,伺服驱动与主轴驱动共用电源模块,组成伺服/主轴一体化的结构。伺服驱动模块有单轴型、双轴型、三轴型三种基本规格。标准型(FANUC αi系列)为200VAC输入,常用的单轴型有A06B-6114-H103~H109等,双轴型有 A06B-6114-H201-H211等,三轴型有A06B-6114-H301~H304等。高电压输入型(FANUC α i(HV)系列)为400VAC 输入,常用的单轴型有A06B--6124-H102~H109等,双轴型有A06B-6124-H201-H211等,目前尚无三轴型结构。FANUC αi系列交流数字伺服配套的数控系统主要有FANUC 0i、FANUC 15i/150i、 FANUC16i/18i/l60i/180i/20i/21i等。
中国铁塔动环常见告警处理指导手册 一、FSU离线告警 告警名称:FSU?线; 告警解释:FSUffi铁塔集团平台连接通讯中断; 原因分析:1)信号差或不稳定;2)FSUI^备掉电;3)无线模块硬件故障;4) FSUI^备硬件故障;5)天线和无线模块连接中断,或天线丢失;6) VPM艮务器连接不上;7) SIM卡被盗、欠费或故障。 平台处理方法:查询历史告警记录,如频繁离线或长时间离线,需现场检查。 现场处理方法: 第一步检查供电: 1)在运维监控系统检查离线站点是否有停电告警,判断是否现场停 电; 2)现场检查FSU指示灯不亮设备没有供电。 原因分析:FSUtt电异常。 解决方案: 1)检查整个基站是否停电,如停电则通知相关人员取电; 2)检查FSU供电空开是否跳闸及通电线路是否正常。 第二步检查无线模块: 检查无线模块指示灯都不亮或都常亮。
原因分析:无线模块供电异常或无线模块故障。 解决方案: 1)无线模块供电故障,则检查给无线模块供电接线是否正常如正常, 则用万用表测量给无线模块供电FSLtt出端是否有12V,如没有则为FS姬电板问题,更换FSUf;电板。 2)确认供电正常,则更换无线模块进行测试。 下站建议:下站时建议随身带上一套可以成功拨号的无线网卡和SIM 卡,下站的时候作对比验证,快速确认是SIM卡问题,还是无线模块问题。 第三步FSU^查 解决方案:更换运营商无线模块或将天线外延(室内站放到室外,室外柜放到底部隐蔽区域或有外层保护情况下放到机柜顶部) 2)铁塔VPN网络连接异常:铁塔VPMW络提示连接异常 3)铁塔网管未注册:铁塔网管提示连接异常(正常显示连接正常) 解决方案: 确认总部平台正常,重启FSU(等待程序连接)。如重启后未恢复,联系厂家专业人员。 平台恢复确认:告警管理-活动告警监控-当前告警查询该站点,确认告警是否消除。
FANUC系统常见报警中文对照及解决方法 1005 X AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 X轴闭锁.禁止移动(没在交换台过程中,没在修调方式,台板1或2在伸出位 X轴锁住,不能移动 设D493=1进入修调方式.检查继电器,电磁阀,开关及线路 1006 Y AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 机械手臂在主轴側 Y轴锁住,不能移动. 设D499=1进入修调方式.检查继电器,电磁阀,开关及线路 1007 Z AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 机械手臂在主轴側 ZY轴锁住,不能移动. 设D499=1进入修调方式.检查继电器,电磁阀,开关及线路
1010 SPINDLE TOOL NOT CLAMP 产生状态及原因 主轴刀具未夹紧。 主轴不能旋转。 检查主轴刀具夹紧开关,确认动作正常后, 同时按下键和键,清除报警。 1011 SPINDLE TOOL NOT UNCLAMP 产生状态及原因 主轴刀具未松开。 主轴不能旋转。 检查主轴刀具松开开关,确认动作正常后, 同时按下键和键,清除报警。 1012 SPINDLE ORIENTAL NOT COMPLETE 产生状态及原因 主轴定向未完成(F45.7没输出)。 不能进行刀具交换。 检查主轴定向开关是否工作正常。 1013 M FUNCTION DID NOT COMPLETE 产生状态及原因 在执行M功能时,可能是某个M代码未执行完.程序加工不能正常进行. 检查是哪一个M功能未执行。
FANUC常见伺服报警及解决方法 SV0301:APC报警:通信错误 1、检查反馈线,是否存在接触不良情况。更换反馈线; 2、检查伺服驱动器控制侧板,更换控制侧板; 3、更换脉冲编码器。 SV0306:APC报警:溢出报警 1、确认参数No.2084、No.2085是否正常; 2、更换脉冲编码器。 SV0307:APC报警:轴移动超差报警 1、检查反馈线是否正常; 2、更换反馈线。 SV0360:脉冲编码器代码检查和错误(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 SV0364:软相位报警(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 3、检查是否有干扰,确认反馈线屏蔽是否良好 。 SV0366:脉冲丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 2、更换脉冲编码器。 SV0367:计数丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 3、更换脉冲编码器。 SV0368:串行数据错误(内装)报警 1、检查反馈线屏蔽是否良好; 2、更换反馈线; 3、更换脉冲编码器。 SV0369:串行数据传送错误(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰源; 2、更换反馈线; 3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警 1、检查分离型接口单元SDU是否正常上电; 2、更换分离型接口单元SDU。 SV0385:串行数据错误(外置)报警 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0386:数据传送错误(外置) 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0401:伺服准备就绪信号断开 1、查看诊断No.358,根据No.358的内容转换成二进制数值,进一步确认401报警的故障点。 2、检查MCC回路; 3、检查EMG急停回路; 4、检查驱动器之间的信号电缆接插是否正常; 5、更电源单元。 同步控制中SV0407:误差过大报警 1、检查同步控制位置偏差值; 2、检查同步控制是否正常。 移动轴时SV0409报警 1、检查移动时该轴的负载情况; 2、确认机械是否卡死; 3、确认伺服参数设定是否正常; 4、更换伺服电机; 5、更换伺服驱动器。 SV0410:停止时误差过大报警 1、检查机械是否卡死; 2、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 3、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,更换电机或伺服驱动器。 SV0411:移动时误差过大报警 1、查看负载情况,若负载过大。 2、检查机械是否卡死; 3、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 4、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,伺服驱动器。
常见(重要)告警说明一.常见(重要)告警列表:
目录索引: 1.1 PROCESSOR[33] ACCESS-FAIL[3] (3) 1.2 BSC-ADAPT[73]EQUIPMENT-FAULT[128]: (4) 1.3 BSC-CLOCK[52] LOSS-OF-SYSTEM-CLK-A[3]: (5) 1.4 BSC-CLOCK[52] LOSS-OF-SYSTEM-CLK-B[4]: (5) 1.5 BSC-CLOCK[52] BSC-RUN-ON-LOCAL-CLK[6]: (6) 2.1 PROCESSOR[33] RESTART[0]: (7) 2.2 PROCESSOR[33] RESET[1]: (7) 2.3 PROCESSOR[33] SDCCH-OVRL-BSC[9]: (8) 2.4 PROCESSOR[33] TAKEOVER[7]: (8) 2.5 PROCESSOR[33] RELC-OV[4]: (9) 2.6 GOLBAL-BSC[47] SCCP-NOT-A V AIL[1]: (10) 3.1 N7[35] LNK-REP[0]: (11) 3.2 TSC-TRUNK [66] TWO-MB-MISSING[50]: (11) 3.3 TSC-TRUNK [66] AIS-2-MB[66]: (11) 3.4 TSC-TRUNK [66] FRAME-ALIGNMENT[81]: (11) 3.5 TSC-TRUNK [66] BER-10E-3[99]: (12) 3.6 TSC-TRUNK [66] BER-10E-4[100]: (12) 3.7 TSC-TRUNK [66] BER-10E-6[102]: (12) 3.8 TSC-TRUNK [66] FAR-END-ALARM[176]: (12) 4.1 BSS BVCSig is broken on: (13) 4.2 BSS GSL is broken on(GSL out): (14) 5.1 CELL[43] LOSS-OF-BCCH[0]: (16) 5.2 CELL[43] LOSS-OF-ALL-CHAN[3]: (17) 6.1 CELL[43] LOSS-OF-TCH[2]: (18) 7.1 RTCH_fail_rate (18) 8.1 BTS-EXTERNAL[9] bts-external-2[2] (19) 8.2 BTS-EXTERNAL[9] bts-external-2[2]mbo (19) 8.3 ENVIR[5] MAINS-AL[20] (19) 9.1 BTS-EXTERNAL[9] bts-external-3[3] (19) 9.2 BTS-EXTERNAL[9] bts-external-3[3]mbo (19) 10.1 At least one temperature sensor has detected a T > 65C: (20) 10.2 CNVR: disjunction due to output voltage problem on converter: (20) 10.3 2.1V: no more redondancy of GPU boards: (21)
10. 故障代码明细表 本章描述了汇报到BSC的故障及被怀疑引起故障的硬件单元。 应用时,此故障代码列表指出的故障对CME20版本R5、R6.0、R6.1或R7及更高版本,以及RBS模型RBS2301,2302有效。 当本章应用于CMS40时,需对应下面的转换表 表12 10.1术语 以下术语本章通用 10.1.1故障号码 故障号码与故障表经由Abis接口汇报的位置点是相一致的。 10.1.2 1A类内部故障表(I1A) 此类故障汇报的是影响MO功能的故障,有故障的硬件是MO所对应的硬件中的一部分。 10.1.3 1B类内部故障表(I1B) 此类故障汇报的是影响MO功能的故障,故障源在MO的外部。 10.1.4 2A类内部故障表(I2A) 此类故障汇报的是不影响MO功能的故障,有故障的硬件位于MO内部。 10.1.5 1类外部环境表(EC1) 此类环境汇报的是影响MO功能的环境,环境为TG外部环境。 10.1.6 2类外部环境表(EC2) 此类环境汇报的是不影响MO功能的环境,环境为TG外部环境。 10.1.7 可替换单元表(RU 表) 此表所汇报的单元是上述的内部故障表内被怀疑引起故障的硬件单元。 10.1.8逻辑RU 一个逻辑RU定义为一个可用作参考的单元,但不是一个单独的物理单元,有四类不同的逻辑RU: (1)总线:总线常被归类为一个单独的物理单元,只是实现于机柜底板的线缆, 当某一总线在RU表上被指出时可理解为发生故障的硬件可能是连到此总线上的任何单元或是此总线本身。 逻辑RU总线有:
? X总线; ? 本地总线; ? 定时总线; ? CDU总线; ? 电源通讯环路 (2)天线:(不应用于RBS2301和RBS2302)。一个逻辑天线表示的是收发信机和物理天线间整个的信号通道。逻辑RU天线有: ? RX天线A (只用于R5) ? RX天线B (只用于R5) ? TX天线A (只用于R5) ? TX天线B (只用于R5) ? 天线 当就故障进行更多细节的故障分析时上述1、2类逻辑RU将被提及。 (3)环境:此类RU记录了基站不能影响的情形,此类RU有两组; ? 电源,指外部电源 ? 气候,指温度和湿度 例如,若是机柜内的温度过高或引入的交流电超压,则逻辑RU“环境”便指示出错。 此类逻辑RU为: ? 环境 (4)RBS数据库。尽管RBS数据库不是一个物理单元,但仍被看作是一个可替换单元,它仅由数据库里面的数据组成而非存贮其的介质。 10.2故障表解码 注意:在使用RBS2000版本HRB105 01/2,R7修订版及更高版本时,故障表无需解码。故障表会当场给出故障类型及表述。 当一个故障表发送到OMC(操作维护中心)必须转化为一个十进制数,以下故障代码说明将被用到。例如,当打印出错日志时。 所有故障代码及RU代码由一个十六进制数构成,最多12位。这个12位的十六进制数表明故障表由48个比特组成。 除此之外的是外部故障代码,这些代码由一个4位十六进制数即16个比特组成,其故障表解码原理与上述是一样的。 10.2.1例1 SO(服务对象)CF汇报了一个1A类内部故障,故障代码为“000000004100”。 第8位和14位比特为“1”,表明故障代码8和14在CF 1A类故障列表内被缴活。根据此故障列表里的信息8号和14号给出的故障为“定时单元VCO故障”(故障代码8)和“本地总线故障”(故障代码14)。 VCO-V oltage Controlled Oscillator压控振荡器。 10.2.2例2
发那科fanuc数控系统常见问题及解决方法 学习2010-06-13 09:04:52 阅读106 评论0 字号:大中小订阅 1、要编辑FS10/11格式程序,必须将设定画面的:FS15 TAPE FORMATE=1 (FANUC 0i-TB) 请问FS10/11格式程序什么含义它有什么特点如何进行参数设定我想了解的详细一点,非常感谢您的回信!操作书中所讲,让我看的满头汗水。 答:18 使用FS10/11 纸带格式的存储器运行概述通过设定参数(#1),可执行FS10/11 纸带格式的程序。说明Oi 系列和10/11 系列的刀具半径补偿,子程序调用和固定循环的数据格式是不同的。10/11 系列数据格式可用于存储器运行。其它数据格式必须遵从Oi 系列。当指定的数据值超出Oi 系列的规定范围时,出现报警。对于Oi 系列无效的功能不能存储也不能运行。 详细参见B-63844C/01 编程18.使用FS10/11 纸带格式的存储器运行 2、关于梯形图(0i-A) 梯形图传下来后如何用LADDER--3打开,详细步骤是怎样的 答:打开LADDER III, 新建一个文件,PMC类型要和你的实际类型一致,然后再进入"文件"--"导入"(import), 选择"Memory card file" 再选择需要导入的文件名(传下来的梯形图),确定, 就可以了。 3、还是老问题(FANUC-0i) 专家同志:你好我按您的方法去操作了.在A轴显示正常的那台台中精机上用手动操作A轴,超过360度时,会报警A超程,而在A轴显示不正常的台中精机上手动操作时,即使超过360度,也不会报警,不停的往一个方向摇时,其显示值会累加,当然,反方向摇时会累减.我好困惑.是哪个参 数设错了呢还得请您指导.谢谢!!!!! 4、参数不可改写(BJ-FANUC Oi-MB) 最近不知道是怎么回事,我们所用的加工中心,在设置中的参数可写入不能置1了。请帮我们分析一下是什么原因引起的。怎样能够修改参数。谢谢。还有一个问题是最近每天我们的机床 都出现了926报警,这是怎么回事呀 答:1.不能修改PWE,可能是将设定画面的3292#7改为1了,2。检查除了PWE不能修改外,看其他的能否改动。3。926报警和伺服放大器之间的连接有关系,当出现该报警时,观察电器 柜中的放大器各个数码管都显示什么 5、如何关掉光栅尺(FANUC-16) 一台发那科16系统带光栅尺加工中心,X轴回原点时,报警090,回不了原点.现在要把光栅尺关掉, 请问,怎样才能关掉呢多谢! 答:1.参数1815#1=02.伺服参数:2084/2085(N/M),设定=电机一转移动量(丝杠毫米数)/1000。2024=1=电机一转移动量(微米)假如丝杠为10毫米,则:2084=1,2085=100, 1825=10000 6、还是注释的问题(FANUC-SEVERIES OI MB) 因为我们经常用到宏程序,也就是说方括号和圆括号可能在一个程序中同时出现,在我以前用的VMC800(由成都托普数控生产)机床上是用LCD下面的软键输入的,这样不会在不修改参数的情况下就能输入方括号和圆括号了.请问要实现这种功能时,应该怎么办谢谢你们在百忙之中回 复的信息,对我的工作有相当大的帮助,谢谢! 答:3204 #0PAR 使用小键盘时,"["和"]"字符,0:作为"["和"]"使用。1:作为"("和")"使用。3204 #2EXK 是否使用输入字符扩展功能。0:不使用1:使用。注软键[C-EXT]是在程序画面的操作选择软键。用此键,可以通过软键操作输入"("、")"、"@"。使用小型键盘时,因没有"("、")"、"@"键,故使用[C-EXT]键。试一下3204 #0=0,3204 #2=1