
CwRsync是基于cygwin平台的rsync软件包,支持windows对windows、windows 对Linux、Linux对windows高效文件同步。由于CwRsync已经集成了cygwin类库,因此安装的时候可以省去cygwin包。Cwrsync还集成了OpenSSH for windows,可以实现Linux 下Rsync一模一样的操作。详细配置步骤如下:
一、服务器端安装配置
1、下载服务器端安装文件https://www.doczj.com/doc/b914870643.html,/projects/sereds/files/cwRsync/
2、安装
这一步很重要,可以说是cwRsync安装成功与否的关键。这一步要求输入当前系统存在的账号密码,用来启动RsyncServe r服务,这个账号需要在安装前就要建立好(最新版亦会自动生成新的账号)。
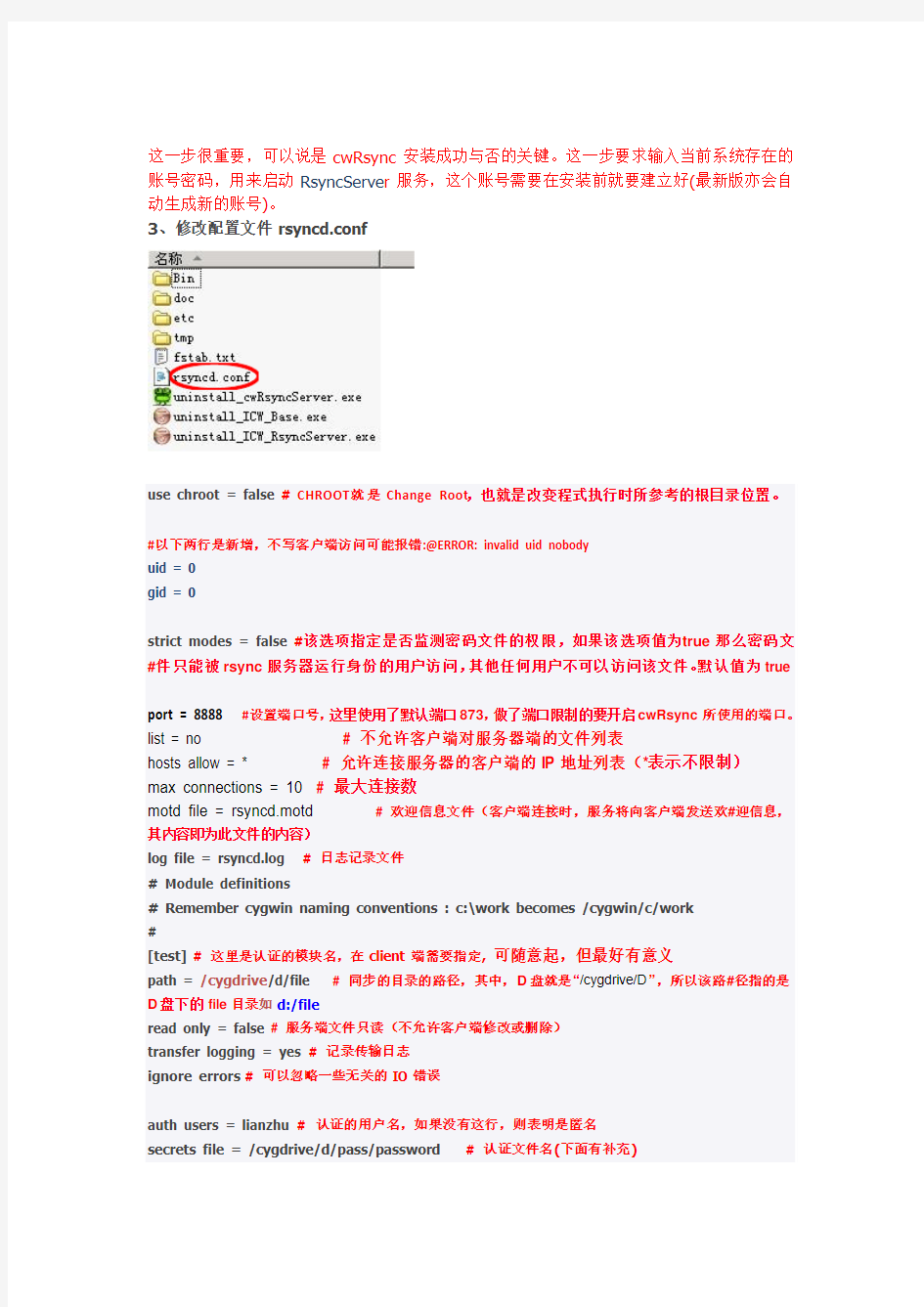
3、修改配置文件rsyncd.conf
use chroot = false # CHROOT就是Change Root,也就是改变程式执行时所参考的根目录位置。
#以下两行是新增,不写客户端访问可能报错:@ERROR: invalid uid nobody
uid = 0
gid = 0
strict modes = false #该选项指定是否监测密码文件的权限,如果该选项值为true那么密码文#件只能被rsync服务器运行身份的用户访问,其他任何用户不可以访问该文件。默认值为true
port = 8888 #设置端口号,这里使用了默认端口873,做了端口限制的要开启cwRsync所使用的端口。list = no # 不允许客户端对服务器端的文件列表
hosts allow = * # 允许连接服务器的客户端的IP地址列表(*表示不限制)
max connections = 10 # 最大连接数
motd file = rsyncd.motd # 欢迎信息文件(客户端连接时,服务将向客户端发送欢#迎信息,其内容即为此文件的内容)
log file = rsyncd.log # 日志记录文件
# Module definitions
# Remember cygwin naming conventions : c:\work becomes /cygwin/c/work
#
[test] # 这里是认证的模块名,在client端需要指定,可随意起,但最好有意义
path = /cygdrive/d/file # 同步的目录的路径,其中,D盘就是“/cygdrive/D”,所以该路#径指的是D盘下的file目录如d:/file
read only = false # 服务端文件只读(不允许客户端修改或删除)
transfer logging = yes # 记录传输日志
ignore errors # 可以忽略一些无关的IO错误
auth users = lianzhu # 认证的用户名,如果没有这行,则表明是匿名
secrets file = /cygdrive/d/pass/password # 认证文件名(下面有补充)
需要注意的几点:
(1)你设置的rsync服务器端口必须在防火墙里打开,否则客户端还是连接不上。
(2)rsyncd.conf文件中的模块上方是公用的参数,也就是所有模块都会共享的参数,如果在该模块内部又为该参数设置了不同的值,则会按模块内部的值来算。
(3)rsyncd.secrets文件的内容格式如下:
用户名:密码
例如:
lianzhu:123456
(4)一般来说,你要同步一个目录的话,就要在rsyncd.conf中添加一个“模块”,并为该模块设置路径等参数。
(5)如果客户端连接rsync服务器时,可能报错:@ERROR: invalid uid nobody,并且你的登录用户名和密码之类的都设置对了,那么很可能你就需要添加上面的“uid=0”和“gid=0”了,我就用这个解决了问题。
(6)在模块的路径(path)中,经测试可以包含空格。
好了,服务器端的设置基本完成,然后启动rsync服务,就可以了。
4.启动RsyncServer服务并保证开机自动重启,服务器端配置完毕。
二、客户端安装配置
1、下载客户端安装包https://www.doczj.com/doc/b914870643.html,/projects/sereds/files/cwRsync/截止本文档更新日期,最新版本是cwRsync_4.1.0_Installer
2、安装
3、cwRsync客户端不需要很复杂的配置
(1)设置环境变量
(2)只需要通过命令行来同步服务器端的数据批处理脚本,例如:自定义rsync.bat内容如下:
rsync -avz --progress --delete --password-file=/cygdrive/e/mypassword lianzhu@192.168.1.100::test /cygdrive/f/testclient 命令参数解释: -avzP -a 参数,相当于-rlptgoD,-r 是递归 -l 是链接文件,意思是拷贝链接文件;-p 表示保持文件原有权限;-t 保持文件原有时间;-g 保持文件原有用户组;-o 保持文件原有属主;-D 相当于块设备文件; -z 传输时压缩; -P 传输进度; -v verbose,详细模式输出 -u是只同步已经更新的文件,避免没有更新的文件被重复更新一次,不过要注意两者机器时钟的同步 --progress 显示备份过程 --delete 删除那些客户端中SRC没有的文件 --password-file 指定密码文件,只需包含密码而不用包含用户名,你要在指定的目录下定义一个密码文件,只要写lianzhu这个用户名对应的密码就可以。我这里是E盘根目录下的mypassword。 补充:关于 如果客户端密码文件报错如下: rsync password file must be owned by root when running as root 解决方案可添加 rsync -avz --progress --delete lianzhu@192.168.1.100::test /cygdrive/f/testclient lianzhu@192.168.1.100::test lianzhu登陆服务器端的用户名 @192.168.1.100服务器端的ip地址 test服务器端指定的认证模块名,多个同步作业靠此模块名区分 / cygdrive/f/testclient 存放服务器端同步文件的本地目录 4、配置系统作业,运行脚本选择rsync.bat,客户端配置完毕。 rsync会自动判断哪些文件修改了,哪些没有修改,只传输修改过的文件(并且还会增量传输),节省你的带宽,极其高效。rsync功能非一般强大,关于rsync的更多配置选项,此处绝对不可能描述得完,请参考其手册,手册可在安装目录下的doc文件夹中找到。 5.通过windows中的“任务计划”来创建定时任务,执行定时同步.以下以WIN7为例创建任务计划。(1)计算机管理-----------→任务计划程序--------→创建基本任务 (2)下一步下一步 (3)最后点击完成,就创建了一个任务计划。只不过它是按天执行的,如果我们希望其每小时执行一次。只要在用鼠标点击新创建的任务计划,并在弹出菜单中选择“属性”,这时在弹出以下窗口,点击“触发器”,如下 大功告成。 补充: Rsync的命令格式可以为以下六种: rsync [OPTION]... SRC DEST rsync [OPTION]... SRC [USER@]HOST:DEST rsync [OPTION]... [USER@]HOST:SRC DEST rsync [OPTION]... [USER@]HOST::SRC DEST rsync [OPTION]... SRC [USER@]HOST::DEST rsync [OPTION]... rsync://[USER@]HOST[:PORT]/SRC [DEST] 对应于以上六种命令格式,rsync有六种不同的工作模式: 1)拷贝本地文件。当SRC和DES路径信息都不包含有单个冒号":"分隔 符时就启动这种工作模式。如:rsync -a /data /backup 2)使用一个远程shell程序(如rsh、ssh)来实现将本地机器的内容拷 贝到远程机器。当DST路径地址包含单个冒号":"分隔符时启动该模式。如:rsync -avz *.c foo:src 3)使用一个远程shell程序(如rsh、ssh)来实现将远程机器的内容拷 贝到本地机器。当SRC地址路径包含单个冒号":"分隔符时启动该模式。如:rsync -avz foo:src/bar /data 4)从远程rsync服务器中拷贝文件到本地机。当SRC路径信息包含"::" 分隔符时启动该模式。如:rsync -av root@172.16.78.192::www /databack 5)从本地机器拷贝文件到远程rsync服务器中。当DST路径信息包含"::"分隔符时启动该模式。如:rsync -avu /cygdrive/f/xx hy@127.0.0.1::up 6)列远程机的文件列表。这类似于rsync传输,不过只要在命令中省略 掉本地机信息即可。如:rsync -v rsync://172.16.78.192/www rsync参数的具体解释如下: -v, --verbose 详细模式输出 -q, --quiet 精简输出模式 -c, --checksum 打开校验开关,强制对文件传输进行校验 -a, --archive 归档模式,表示以递归方式传输文件,并保持所有文件属性,等于-rlptgoD -r, --recursive 对子目录以递归模式处理 -R, --relative 使用相对路径信息 -b, --backup 创建备份,也就是对于目的已经存在有同样的文件名时,将老的文件重新命名为~filename。可以使用--suffix选项来指定不同的备份文件前缀。 --backup-dir 将备份文件(如~filename)存放在在目录下。 -suffix=SUFFIX 定义备份文件前缀 -u, --update 仅仅进行更新,也就是跳过所有已经存在于DST,并且文件时间晚于要备份的文件。(不覆盖更新的文件) -l, --links 保留软链结 -L, --copy-links 想对待常规文件一样处理软链结 --copy-unsafe-links 仅仅拷贝指向SRC路径目录树以外的链结 --safe-links 忽略指向SRC路径目录树以外的链结 -H, --hard-links 保留硬链结 -p, --perms 保持文件权限 -o, --owner 保持文件属主信息 -g, --group 保持文件属组信息 -D, --devices 保持设备文件信息 -t, --times 保持文件时间信息 -S, --sparse 对稀疏文件进行特殊处理以节省DST的空间 -n, --dry-run现实哪些文件将被传输 -W, --whole-file 拷贝文件,不进行增量检测 -x, --one-file-system 不要跨越文件系统边界 -B, --block-size=SIZE 检验算法使用的块尺寸,默认是700字节 -e, --rsh=COMMAND 指定使用rsh、ssh方式进行数据同步 --rsync-path=PATH 指定远程服务器上的rsync命令所在路径信息 -C, --cvs-exclude 使用和CVS一样的方法自动忽略文件,用来排除那些不希望传输的文件 --existing 仅仅更新那些已经存在于DST的文件,而不备份那些新创建的文件 --delete 删除那些DST中SRC没有的文件 --delete-excluded 同样删除接收端那些被该选项指定排除的文件 --delete-after 传输结束以后再删除 --ignore-errors 及时出现IO错误也进行删除 --max-delete=NUM 最多删除NUM个文件 --partial 保留那些因故没有完全传输的文件,以是加快随后的再次传输 --force 强制删除目录,即使不为空 --numeric-ids 不将数字的用户和组ID匹配为用户名和组名 --timeout=TIME IP超时时间,单位为秒 -I, --ignore-times 不跳过那些有同样的时间和长度的文件 --size-only 当决定是否要备份文件时,仅仅察看文件大小而不考虑文件时间 --modify-window=NUM 决定文件是否时间相同时使用的时间戳窗口,默认为0 -T --temp-dir=DIR 在DIR中创建临时文件 --compare-dest=DIR 同样比较DIR中的文件来决定是否需要备份 -P 等同于 --partial --progress 显示备份过程 -z, --compress 对备份的文件在传输时进行压缩处理 --exclude=PATTERN 指定排除不需要传输的文件模式 --include=PATTERN 指定不排除而需要传输的文件模式 --exclude-from=FILE 排除FILE中指定模式的文件 --include-from=FILE 不排除FILE指定模式匹配的文件 --version 打印版本信息 --address 绑定到特定的地址 --config=FILE 指定其他的配置文件,不使用默认的rsyncd.conf文件--port=PORT 指定其他的rsync服务端口 --blocking-io 对远程shell使用阻塞IO -stats 给出某些文件的传输状态 --progress 在传输时现实传输过程 --log-format=formAT 指定日志文件格式 --password-file=FILE 从FILE中得到密码 --bwlimit=KBPS 限制I/O带宽,KBytes per second -h, --help 显示帮助信息 一般都使用azv选项 全日制普通本科生毕业设计 基于MATLAB实时串口数据采集与曲线显示REAL-TIME SERIAL DATA ACQUISITION AND FIGURE SHOW BASED ON MATLAB 学生姓名: 学号: 年级专业及班级: 指导老师及职称: 学院: 提交日期:2011年5月 全日制普通本科生毕业论文(设计) 诚信声明 本人郑重声明:所呈交的本科毕业论文(设计)是本人在指导老师的指导下,进行研究工作所取得的成果,成果不存在知识产权争议。除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体在文中均作了明确的说明并表示了谢意。本人完全意识到本声明的法律结果由本人承担。 毕业论文(设计)作者签名: 年月日 目录 摘要 (1) 关键词 (1) 1前言 (2) 1.1 Matlab实时串口数据采集研究现状及发展趋势 (2) 1.2研究的目的和意义 (4) 1.3论文的组织结构 (5) 2Matlab下实时串口数据采集概要 (5) 2.1 Matlab的Serial类 (5) 2.2 数据采集 (6) 2.3曲线显示 (7) 3实时串口数据采集与曲线显示的实现 (8) 3.1实时串口通信的实现 (8) 3.2数据采集的实现 (9) 3.3曲线显示GUI的实现 (10) 4基于MATLAB的实时串口数据采集与曲线显示的具体做法 (12) 4.1数据采集的一般流程 (12) 4.1.1创建接口对象并设置属性 (12) 4.1.2打开串口设备对象 (12) 4.1.3读写串口操作 (13) 4.1.4关闭并清除设备对象 (13) 4.2基于Matlab中断方式的实时串行通信编程 (13) 4.3绘制采集数据的曲线波形和数据显示 (14) 4.3.1绘制曲线波形 (14) 实时数据采集系统项目解决方案 目录 1、背景 (2) 1. 1、引言 (2) 1.2、项目目标 (2) 2、应用系统体系结构 (3) 2.1、实时数据采集系统的原理构架 (3) 3、实时数据采集系统的主要功能….. .............................................................. .3 4、实时数据采集系统主要技术特征 (4) 4.1、数据传输方面 (5) 4.2、数据存储方面 (5) 4.3、历史数据 (5) 4.4、图形仿真技术 (5) 5、实时数据采集系统性能特征 (5) 5.1、数据具有实时性 (6) 5.2、数据具有稳定性 (6) 5.3、数据具有准确性 (6) 5.4、数据具有开放性 (6) 6、DCS及实时数据采集机连接说明 (6) 7、系统运行环境说明 (7) 7.1系统网络环境说明 (8) 7.2硬件环境说明 (8) 1、背景 1. 1、引言 随着国家大力推进走新型工业化道路,以信息化带动工业化,以工业化促进信息化。电力企业面临着日趋激烈的竞争。降低成本,提高生产效率,快速响应市场,是电力企业不断追求的目标。要实现上述目标,必须把企业经营生产中的各个环节,包括市场分析、经营决策、计划调度、过程监控、销售服务、资源管理等全部生产经营活动综合为一个有机的整体,实现综合信息集成,使企业在经营过程中保持柔性,因此,建立全厂统一的生产实时数据平台,就成了流程企业今后生产信息化的关键。 1.2、项目目标 “实时数据采集系统”是为生产过程进行实时综合优化服务信息系统提供数据基础。 企业信息化建设的关键问题是集成,即在获取生产流程所需全部信息的基础上,将分散的控制系统、生产调度系统和管理决策系统有机地 集成起来,不同业务和系统间能够实时的交换和共享数据。 ?建立统一的企业数据模型。 ?解决分期建设的不同应用系统、不同电厂之间彼此隔离、互不匹配、 互不共享的“信息孤岛”问题。 ?保证数据来源一致性,提高数据经过层层抽取之后的可信度。 ?汇总、分析和展示企业历史的业务数据。 ?企业管理层能够直接根据各个电厂的真实数据进行统计数据、分析 逐步钻取直到数据根源。 ?透明底层的数据,监督统计分析数据的准确性。 特殊三角形同步练习 (直角三角形) 1.如图,直线l上有三个正方形ABC,若A,C的面积分别为6,8,则正方形B的面积为________. 2.如图所示的图形中,所有的四边形都是正方形,所有的三角形都是直角三角形,其中,最大的正方形的边长为7cm,则正方形ABCD的面积之和为___________. 3.如图,△ABC中,∠ACB=90°,AB=6,分别以边AC、BC为直径向形外作两个半圆,则这两个半圆的面积的和为___________.(结果中保留π) 注:第4-6题要求写出解答过程(提示:勾股定理、方程思想) 4.如图所示,有一块直角三角形纸片,∠C=90°,AC=4cm,BC=3cm,将斜边AB翻折,使点 B落在直角边AC的延长线上的点E处,折痕为AD,则BD的长为________. 5.如图,折叠矩形纸片ABCD的一边AD,使点D落在BC边的点F处,已知AB=8cm, BC=10cm,则EC的长________. 6.如图,正方形ABCD的边长为9,将正方形折叠,使D点落在BC边上的点E处, 折痕为GH.若BE:EC=2:1,则线段CH的长是________. 7.如图,△ABC中,∠C=90°,D在CB上,E为AB之中点,AD、CE相交于F,且AD=DB.若∠B=20°,则∠DFE=________. 8.如图,在△ABC中,∠C=2∠B,D是BC上的一点,且AD⊥AB,点E是BD的中点,连接AE,若AE=6.5,AD=5,则AC=______;△ABE的周长是______. 9.如图,在△ABD中,∠D=90°,CD=6,AD=8,∠ACD=2∠B,则BD的长是________. 10.如图1,一架梯子AB长2.5米,顶端A靠在墙AC上,这时梯子下端B与墙角C距离1.5米,梯子滑动后停在DE的位置上,如图2所示,测得BD=0.5米,求梯子顶端A下滑的距离. 11.如图,在△ABC中,AB=AC=13,BC=10,AM⊥BC,D为AC的中点,E为BC延长线上的一点,且BC=2EC. (1)求△DMC的周长.(2)求证:DB=DE. 由第二讲的内容可知,在三相静止坐标系中,异步电动机数学模型是一个多输入、多输出、非线性、强耦合的控制对象,为了实现转矩和磁链之间的解耦控制,以提高调速系统的动静态性能,必须对异步电动机的数学模型进行坐标变换。 3.1 变换矩阵的确定原则 坐标变换的数学表达式可以用矩阵方程表示为 y=ax (3-1) 式(3-1)表示利用矩阵a将一组变量x变换为另一组变量y,其中系数矩阵a称为变换矩阵,例如,设x是交流电机三相轴系上的电流,经过矩阵a的变换得到y,可以认为y是另一轴系上的电流。这时,a称为电流变换矩阵,类似的还有电压变换矩阵、阻抗变换矩阵等,进行坐标变换的原则如下: (1)确定电流变换矩时,应遵守变换前后所产生的旋转磁场等效的原则; (2)为了矩阵运算的简单、方便,要求电流变换矩阵应为正交矩阵; (3)确定电压变换矩阵和阻抗变换矩阵时,应遵守变换前后电机功率不变的原则,即变换前后功率不变。 假设电流坐标变换方程为: i=ci′ (3-2) 式中,i′为新变量,i称为原变量,c为电流变换矩阵。 电压坐标变换方程为: u′=bu (3-3) 式中,u′为新变量,u为原变量,b为电压变换矩阵。 根据功率不变原则,可以证明: b=ct (3-4) 式中,ct为矩阵c的转置矩阵。 以上表明,当按照功率不变约束条件进行变换时,若已知电流变换矩阵就可以确定电压变换矩阵。 3.2 定子绕组轴系的变换(a-b-c<=>α-β) 所谓相变换就是三相轴系到二相轴系或二相轴系到三相轴系的变换,简称3/2变换或2/3变换。 三相轴系和二相轴系之间的关系如图3-1所示,为了方便起见,令三相的a轴与两相的α 轴重合。假设磁势波形是按正弦分布,或只计其基波分量,当二者的旋转磁场完全等效时,合成磁势沿相同轴向的分量必定相等,即三相绕组和二相组绕的瞬时磁势沿α、β轴的投影应该相等,即: (3-5) 式中,n3、n2分别为三相电机和两相电机每相定子绕组的有效匝数。 经计算并整理之后可得: (3-6) (3-7) 实时数据采集系统方案 4.1、数据传输方面……………………………………………………..5 4.2、数据存储方面……………………………………………………..5 4.3、历史数据…………………………………………………………...5 4.4、图形仿真技术……………………………………………………..5 5、实时 数据采集系统性能特 征 ...................................................................... 5 5.1、数据具有实时性…………………………………………………..6 5.2、数据具有稳定性…………………………………………………..6 5.3、 数据具有准确性…………………………………………………6 5.4、数据具有开放性…………………………………………………..6 6、DCS 及实时数据采集机连接说 明 ............................................................. 6 7、系 统运行环境说 明 ..................................................................... ................ 7 7.1 系统网络环境说明………………….……………………………....8 7.2 硬件环境说明……………………………………………………….8 1 实时数据采集系统《项目解决方案》 1、背景 1. 1、引言 随着国家大力推进走新型工业化道路,以信息化带动工业化,以工业化促进信 息化。电力企业面临着日趋激烈的竞争。降低成本,提高生产效率,快速响应市 中考数学第二轮复习二 分类讨论 同步跟踪配套试题 (60分 45分钟) 一、选择题(每题 3分,共 15分) 1.若等腰三角形的一个内角为500 则其他两个内角为( ) A .500 ,80o B .650, 650 C .500 ,650 D .500,800或 650,650 2.若||3,||2,,( )a b a b a b ==>+=且则 A .5或-1 B .-5或1; C .5或1 D .-5或-1 3.等腰三角形的一边长为3cm ,周长是13cm ,那么这个等腰三角形的腰长是( ) A .5cm B.3cm C .5cm 或3cm D .不确定 4.若⊙O 的弦 AB 所对的圆心角∠AOB=60°,则弦 AB 所对的圆周角的度数为( ) A .300 B 、600 C .1500 D .300或 1500 5.一次函数y=kx+b ,当-3≤x ≤l 时,对应的y 值为l ≤y ≤9, 则kb 值为( ) A .14 B .-6 C .-4或21 D.-6或14 二、填空题(每题3分,共15分) 6.已知||3,||2,0,x y xy x y ==<+=且则_______. 7.已知⊙O 的半径为5cm ,AB 、CD 是⊙O 的弦,且 AB=8cm ,CD=6cm ,AB ∥CD ,则 AB 与CD 之间的距离为__________. 8.矩形一个角的平分线分矩形一边为1cm 和3 cm 两部分,则这个矩形的面积为__________. 9.已知⊙O 1和⊙O 2相切于点P ,半径分别为1cm 和3cm .则⊙O 1和⊙O 2的圆心距为________. 10 若a 、b 在互为倒数,b 、c 互为相反数,m 的绝对值为 1,则2()ab b c m m m ++-的值是______. 三、解答题(每题10分,共30分) 11 已知 y=kx +3与两坐标轴围成的三角形的面积为 24,求其函数解析式. 12 解关于x 的方程(2)1a x b -=-. 13 已知:如图3-2-8所示,直线l 切⊙O 于点C ,AD 为⊙O 的任意一条直径,点B 在直 线l 上,且∠BAC=∠CA D(A D 与AB 不在一条直线上),试判断四边形ABCO 为怎样的特殊四边形? 1.1概要 同步跟踪是一个可选的功能,可让机器人把一个移动工件作为一个固定对象来对待。该功能是应用于那些机器人必须执行的且装配线输送不停止生产的应用中。 此用户指南对如何安装和操作FUNUC数控机器人系统的R-J3b 示教盒程序(TPP)同步跟踪选项提供了说明。此功能为所有基于环线同步跟踪的TP提供了一个完全独立的环境,TP屏幕上可获得同步跟踪程序执行的参数和说明。 图1-1典型同步操作 1.2一般的同步跟踪描述 同步跟踪是指用于跟踪装配生产线的R-J3i B功能选项。在此环境下,机器人必须跟踪操作传送带,平台或者机械上移动的工件。 同步跟踪可以避免使工件从传送带上拿下放到固定工装上,以节省生产时间。如果你细心的把程序分段编到不同的视窗中,同步跟踪也增加了机器人的工作的空间。视窗规定的区域就是工件通过机器人工作区域的那一段时间。 同步跟踪器用以下两种方式实现: ●单轴线性跟踪 ●笛卡儿线性或者环形跟踪 1.3 单轴(轨道)跟踪 在单轴同步跟踪中,机器人延长轴(集成的或者非集成的基轴)的位置调整以能够跟踪直线传送带。传送带的运动方向必须于同步跟踪轴的方向相同。这种单轴跟踪方式就是我们熟知的轨道跟踪,因为传统的应用就是用一根轨道或者平台来实施跟踪动作。关于轨道跟踪,机器人手臂(不包括跟踪轴)是用程序来配置的。所有的动作类型(线性的,环形的或者两个结合使用)都是可行的。轨道跟踪是一种处理连续工件的简单方式。轨道跟踪用在大型系统中,且需要大量的场地空间。其大部分的应用易教易用。这种功能选项使单个系统能够完成大量的工作。 1.4笛卡儿跟踪 笛卡儿跟踪是指固定的机器人,调整其刀锯中心点(TPC)的位置来跟踪传送带的动作。您在使用笛卡尔跟踪时应首要关注工作空间大小,否则您不能安装跟踪的铁轨轴。 您可以通过示教模式有效提高机器人的工作能力。您也可以通过改变传送带的动作来减少环形线的循环时间,从而增加机器人的工作空间和减少完成其动作的时间。 笛卡儿跟踪,就是通过改变机器人主轴(不包括延长轴)手臂设置来实现跟踪动作。由于这个原因,笛卡儿坐标跟踪只能用于线性和环形跟踪程序模式。JOINT模式不适用。 笛卡尔追踪有两种:line和circular(不要把它们和linear跟circular混为一谈)。这些描述分别在1.4.1和第1.4.2章。 注意:轨迹编程和示教对笛卡尔跟踪至关重要。效率低的轨迹会限制机器人的动作,而且会降低生产效率。另外,由于传送带动作,机器人的组合轨迹在程序执行过程中和与在程序示教过程很少相同。在你尝试教学跟踪轨迹前,请参考第四章的计划创建程序和第五章的高级技巧。 注意:笛卡儿跟踪只支持集成的延长轴。 1.4.1 线性跟踪 线性笛卡儿跟踪由一个机器人和一个直线运行通过机器人的传送带组成。机器人通常安装在传送带旁的固定基座上,当由工件经过时,机器人可以轻松地触及。机器人也可以高于或者低于传送带安装,或者根据应用的需要,安装在轨道或者集成延长轴上。 1.4.2 环形跟踪 坐标变换就是两种坐标类型、不同参照体系之间的变换 坐标变换因不同的坐标类型、体系变换方法不一样,没有固定的公式 比方说测量地球,就有多种坐标体系: 1。以地心为原点的空间直角坐标 2。经纬度坐标 3。把地球表面分成很多格子,对于一个小格子区,球面接近平面,在这个平面上设一个平面直角坐标系,就是北京54坐标等坐标形式 这些坐标来回转换,比较复杂,甚至是学术性的问题,一般根据不同的观点和精度,有一些小程序,做转换工作 工程施工过程中,常常会遇到不同坐标系统间,坐标转换的问题。目前国内常见的转换有以下几种:1,大地坐标(BLH)对平面直角坐标(XYZ);2,北京54全国80及WGS84坐标系的相互转换;3,任意两空间坐标系的转换。其中第2类可归入第三类中。所谓坐标转换的过程就是转换参数的求解过程。常用的方法有三参数法、四参数法和七参数法。以下对上述三种情况作详细描述如下: 1,大地坐标(BLH)对平面直角坐标(XYZ) 常规的转换应先确定转换参数,即椭球参数、分带标准(3度,6度)和中央子午线的经度。椭球参数就是指平面直角坐标系采用什么样的椭球基准,对应有不同的长短轴及扁率。一般的工程中3度带应用较为广泛。对于中央子午线的确定有两种方法,一是取平面直角坐标系中Y坐标的前两位*3,即可得到对应的中央子午线的经度。如x=3250212m, y=395121123m,则中央子午线的经度=39*3=117度。另一种方法是根据大地坐标经度,如果经度是在155.5~185.5度之间,那么对应的中央子午线的经度=(155.5+185.5)/2=117度,其他情况可以据此3度类推。 另外一些工程采用自身特殊的分带标准,则对应的参数确定不在上述之列。 确定参数之后,可以用软件进行转换,以下提供坐标转换的程序下载。 2,北京54全国80及WGS84坐标系的相互转换 这三个坐标系统是当前国内较为常用的,它们均采用不同的椭球基准。 数据采集系统的历史与发展 数据采集系统起始于20设计50年代,1956年美国首先研究了用在军事上的测试系统,目标是测试中不依靠相关的测试文件,由非熟练人员进行操作,并且测试任务是由测试设备高速自动控制完成的。由于该种数据采集测试系统具有高速性和一定的 灵活性可以满足众多传统方法不能完成的数据采集和测试任务,因而得到了初步的认可。大约在60年代后期,国外就有成套的数据采集设备产品进入市场,此阶段的数据采集设备和系统多属于专业的系统。 20世纪70年代中后期,随着微型的发展,诞生了采集器,仪表同计算机溶于一 体的数据采集系统。由于这种数据采集系统的性能优良,超过了传统的自是这一类的 典型代表。这种接口系统采用积木式结构,把相应的接口卡装在专用的机箱内,然后 由一台计算机控制。第二类系统在工业现场应用较多。这两种系统中,如果采集测试 任务改变,只需将新的仪用电缆接入系统,或将新卡在添加的专业的机箱里即可完成 硬件平台中建,如果采集测试任务改变,只需将新的仪用电缆接入系统,或将新卡再 添加到专用的机箱即可完成硬件平台重建,显然,这种系统比专用系统灵活得多。20 世纪80年代后期,数据采集系统发生了极大的变化,工业计算机,单片机和大规模集成电路的组合,用软件管理,使系统的成本降低,体积减小,功能成倍增加,数据处 理能力大大加强。 20世纪90年代至今,在国际上技术先进的国家,数据采集技术已经在军事,航 空电子设备及宇航技术,工业等领域被广泛应用。由于集成电路制造技术的不断提高,出现了高性能,高可靠性的单片数据采集系统(DAS)。目前有的DAS产品精度已达16位,采集速度每秒达到几十万次以上。数据采集技术已经成为一种专门的技术,在工业领域得到了广泛的应用。该阶段数据采集系统采用更先进的模块式结构,根据不 同的应用要求,通过简单的增加和更改模块,并结合系统编程,就可扩展或修改系统,迅速地组成一个新的系统。该阶段并行总线数据采集系统高速,模块化和即插即用方 向发展,典型系统有VXI总线系统,PCI,PXI总线系统等,数据位以达到32位总线宽度,采用频率可以达到100MSps。由于采用了高密度,屏蔽型,针孔式的连接器和卡 式模块,可以充分保证其隐定性急可靠性,但其昂贵的价格是阻碍它在自动化领域取 得了成功的应用。 串行总线数据采集系统向分布式系统结构和智能化方向发展,可靠性不断提高。 数据采集系统物理层通信,由于采用RS485双绞线,电力载波,无线和光纤,所以其技术得到了不断发展和完善。其在工业现场数据采集和控制等众多领域得到了广泛的 应用。由于目前局域网技术的发展,一个工厂管理层局域网,车间层的局域网和底层 的设备网已经可以有效地连接在一起,可以有效地把多台数据采集设备联在一起,以 实现生产环节的在线实时数据采集与监控。 交流电动机矢量控制变压变频调速系统(三)第三讲坐标 变换的原理和实现方法 收藏此信息打印该信息添加:李华德来源:未知 由第二讲的内容可知,在三相静止坐标系中,异步电动机数学模型是一个多输入、多输出、非线性、强耦合的控制对象,为了实现转矩和磁链之间的解耦控制,以提高调速系统的动静态性能,必须对异步电动机的数学模型进行坐标变换。 3.1 变换矩阵的确定原则 坐标变换的数学表达式可以用矩阵方程表示为 y=ax (3-1) 式(3-1)表示利用矩阵a将一组变量x变换为另一组变量y,其中系数矩阵a称为变换矩阵,例如,设x是交流电机三相轴系上的电流,经过矩阵a的变换得到y,可以认为y是另一轴系上的电流。这时,a称为电流变换矩阵,类似的还有电压变换矩阵、阻抗变换矩阵等,进行坐标变换的原则如下: (1)确定电流变换矩时,应遵守变换前后所产生的旋转磁场等效的原则; (2)为了矩阵运算的简单、方便,要求电流变换矩阵应为正交矩阵; (3)确定电压变换矩阵和阻抗变换矩阵时,应遵守变换前后电机功率不变的原则,即变换前后功率不变。 假设电流坐标变换方程为: i=ci′ (3-2) 式中,i′为新变量,i称为原变量,c为电流变换矩阵。 电压坐标变换方程为: u′=bu (3-3) 式中,u′为新变量,u为原变量,b为电压变换矩阵。 根据功率不变原则,可以证明: b=ct (3-4) 式中,ct为矩阵c的转置矩阵。 以上表明,当按照功率不变约束条件进行变换时,若已知电流变换矩阵就可以确定电压变换矩阵。 3.2 定子绕组轴系的变换(a-b-c<=>α-β) 所谓相变换就是三相轴系到二相轴系或二相轴系到三相轴系的变换,简称3/2变换或2/3变换。 三相轴系和二相轴系之间的关系如图3-1所示,为了方便起见,令三相的a轴与两相的α轴重合。假设磁势波形是按正弦分布,或只计其基波分量,当二者的旋转磁场完全等效时,合成磁势沿相同轴向的分量必定相等,即三相绕组和二相组绕的瞬时磁势沿α、β轴的投影应该相等,即: (3-5) 式中,n3、n2分别为三相电机和两相电机每相定子绕组的有效匝数。 经计算并整理之后可得: (3-6) (3-7) 图3-1 三相定子绕组和二相定子绕组中磁势的空间矢量位置关系 第十四章控制与控制过程同步练习 双击自动滚屏发布者:admin 发布时间:2008/5/18 阅读:6037次 第十四章控制与控制过程 一、单项选择题 1、(C )的特点是,控制标准Z值是控制对象所跟踪的先行量的函数。 A.自适应控制 B.程序控制 C.跟踪控制 D.最佳控制 2、财务分析、成本分析、质量分析等都属于(A ) A.反馈控制 B.结果控制 C.同期控制 D.前馈控制 3、( C )是进行控制的基础。 A.确定控制对象 B.选择控制重点 C.确立控制对象 D.纠正偏差 4、(D )是企业需要控制的重点对象。 A.资源投入 B.组织的活动 C.人员分配 D.经营活动的成果 5、所有权和经营权相分离的股份公司,为强化对经营者行为的约束,往往设计有各种治理和制衡的手段,包括:①股东们要召开大会对董事和监事人选进行投票表决;②董事会要对经理人员的行为进行监督和控制;③监事会要对董事会和经理人员的经营行为进行检查监督;④要强化审计监督,如此等等。这些措施是:(C) A.均为事前控制 B.均为事后控制 C.①事前控制,②同步控制,③、④事后控制 D.①、②事前控制,③、④事后控制 6、"亡羊补牢,犹未为晚",可以理解成是一种反馈控制行为。下面各种情况中,哪一组更为贴近这里表述的"羊"与"牢”的对应关系? (B) A.企业规模与企业利润B.产品合格率与质量保证体系 C.降雨量与因洪水造成的损失D.医疗保障与死亡率 7、对客观条件,尤其是对管理者需要的信息的量和可靠性而言,要求最高的控制类型是:(A) A.预先控制 B.现场控制 C.事后控制 D.反馈控制 8、控制工作可以说既是上个管理工作过程的终结,又是一个新的管理工作过程的开始。那么控制工作是通过哪一环节与其他4个管理职能紧密结合在一起,从而使管理工作过程形成一个相对闭合的系统:( D ) A.制定目标 B.建立标准 C.衡量实际工作成效 D.纠正偏差 9、小张下岗后开了一间小型餐饮店。他知道,要取得经营成功,除了要有可口的饭菜外,周到的服务和与顾客的良好关系也是非常重要的。为此,他采取了如下控制措施:①在店内显眼的位置挂一本顾客意见簿,欢迎顾客提出意见和批评;②让领班严密地监视服务人员的行为,并对棘手问题的处理提供协助和建议;③在员工上岗之前进行工作技能和态度的培训;④明确规定半年后要对服务质量好的员工给予奖励。以下哪种说法是正确的?( B ) A.④和①一样,都属于事后控制 B.①是事后控制,②是现场控制,③是事前控制 C.④属于激励措施,不属于控制措施 D.③属于激励措施,不属于控制措施 10、统计分析表明,“关键的事总是少数,一般的事常是多数”,这意味着控制工作应该:( A ) A.突出重点,强调例外 B.灵活、及时和适度 C.客观、精确和具体 D.协调计划和组织工作 11、你所在企业的领导为加强对员工绩效的控制,责令你给下列4类人员的工作设计出适宜的控制方法。这些人员分别是:①在一重要领域中进行了多年研究但还没有什么突破的科研人虽; ②—个生产秩序严重混乱的工厂的新任厂长,他恐怕要经过一段较长时期的工作才能理出头绪来;③需要经过几道检测才能认定产品质量是否合格的质量检验人员;④可按某种既定的步骤进行工作的审计人员。你将建议对他们各自采取何种控制方法( C ) A.均采取成果控制法 B.均采取程序控制法 C.①、②采用目标管理法③④采用程序控制法 D.①、②采用程序控制法③④采用成果控制法 经纬度转西安80坐标系坐标转换方法 一、分带划分 1.我国采用6度分带和3度分带: 1∶2.5万及1∶5万的地形图采用6度分带投影,即经差为6度,从零度子午线开始,自西向东每个经差6度为一投影带,全球共分60个带,用1,2,3,4,5,……表示.即东经0~6度为第一带,其中央经线的经度为东经3度,东经6~12度为第二带,其中央经线的经度为9度。 1∶1万的地形图采用3度分带,从东经1.5度的经线开始,每隔3度为一带,用1,2,3,……表示,全球共划分120个投影带,即东经1.5~ 4.5度为第1带,其中央经线的经度为东经3度,东经4.5~7.5度为第2带,其中央经线的经度为东经6度.我省位于东经113度-东经120度之间,跨第38、39、40共计3个带,其中东经115.5度以西为第38带,其中央经线为东经114度;东经115.5~118.5度为39带,其中央经线为东经117度;东经118.5度以东到山海关为40带,其中央经线为东经120度。 地形图上公里网横坐标前2位就是带号,例如:1∶5万地形图上的横坐标为2 0345486,其中20即为带号,345486为横坐标值。 2.当地中央经线经度的计算 六度带中央经线经度的计算:当地中央经线经度=6°×当地带号-3°,例如:地形图上的横坐标为20345,其所处的六度带的中央经线经度为:6°×20-3°=117°(适用于1∶2.5万和1∶5万地形图)。 三度带中央经线经度的计算:中央经线经度=3°×当地带号(适用于1∶1万地形图)。 3、如何计算当地的中央子午线? 当地中央子午线决定于当地的直角坐标系统,首先确定您的直角坐标系统是3 度带还是6度带投影公式推算: 6度带中央子午线计算公式:当地经度/6=N;中央子午线L=6 * N (带号)当没有除尽,N有余数时,中央子午线L=6*N - 3 3度带中央子午线计算公式:当地经度/3=N;中央子午线L=3 X N 我国的经度范围西起73°东至135°,可分成 六度带十一个(13号带—23号带),各带中央经线依次为(75°、81°、 (1) 23°、129°、135°); 三度带二十二个(24号带—45号带)。各带中央经线依次为(72°、75°、……132°、135°); 六度带可用于中小比例尺(如1:250000)测图,三度带可用于大比例尺(如1:10000)测图,城建坐标多采用三度带的高斯投影 二、以以下经纬度为例: 生产现场实时数据采集解决方案 摘要:对于大部分制造企业,生产现场的不良品信息及相关的产量数据的实时数据采集是当前企业面临的一大难题,如何实现高效率、简洁、实时的数据采集,是当前制造业急需解决的问题。 现场数据采集仪产生背景 对于大部分制造业企业,测量仪器的自动数据采集一直是个令人烦恼的事情,即使仪器已经具有RS232/485等接口,但仍然在使用一边测量,一边手工记录到纸张,最后再输入到PC中处理的方式,不但工作繁重,同时也无法保证数据的准确性,常常管理人员得到的数据已经是滞后了一两天的数据;而对于现场的不良产品信息及相关的产量数据,如何实现高效率、简洁、实时的数据采集更是一大难题。 太友科技作为国内领先的精益生产解决方案供应商,针对生产现场的数据采集,正式推出国内首创的现场数据采集领先解决方案,从软、硬件方面帮助客户快速建立车间现场数据采集网络,实时获取车间现场的数据信息,为生产及决策提供实时的数据依据。 生产现场数据采集仪的主要功能 ?实时采集来自生产线的产量数据或是不良品的数量、或是生产线的故障类型(如停线、缺料、品质),并传输到数据库系统中; ?接收来自数据库的信息:如生产计划信息、物料信息等; ?传输检查工位的不良品名称及数量信息; ?连接检测仪器,实现检测仪器数字化,数据采集仪自动从测量仪器中获取测量数据,进行记录,分析计算,形成相应的各类图形,对测量结果进行自动判断,如在机械加工零部件的跳动测量,拉力计拉力曲线的绘制等; 数据采集仪的主要特点 ?配备RS232、RS485串口,可连接多个检测仪器实现自动数据采集; ?配备USB接口,方便数据的输出; ?配备RJ45接口,可通过网线接入网络; ?配备VGA视频输出及音频输出接口; ?内置WIFI模块,可通过无线方式接入,方便现场组网; ?最大支持32G数据存储空间; ?配备4.3英寸触摸屏,方便操作; ?用户可在网络中的任一PC通过接口获取数据,方便进行二次开发; ?配备4.3英寸触摸屏,方便操作; ?可移动测量,即时传输数据,也可测试完成后,通过网络上传数据; ?电源连续工作时间6小时,待机时间长达10天; 生产现场数据采集在品质过程中的非常重要的一个环节,好的数据采集方案可把品质管理人员从处理数据的繁重工作中解放出来,有更多的时间去解决实际的品质问题,同时即时的数据采集也使系统真正地实现实时监控,尽早发现问题,避免更大的损失。 另:现场自动数据采集软件 华东师大版八年级下册数学数据的集中趋势 一.选择题(共8小题) 1.一名射击爱好者5次射击的中靶环数如下:6,7,9,8,9,这5个数据的中位数是() A.6 B.7 C.8 D.9 2.数据0,1,1,x,3,4的平均数是2,则这组数据的中位数是() A.1 B.3 C.1.5 D.2 3.某校八年级(2)班6名女同学的体重(单位:kg)分别为35,36,38,40,42,42,则这组数据的中位数是()A.38 B.39 C.40 D.42 4.一组数据3,3,4,2,8的中位数和平均数分别是() A.3和3 B.3和4 C.4和3 D.4和4 5.某市5月份连续五天的日最高气温(单位:℃)分别为:33,30,30,32,35.则这组数据的中位数和平均数分别是() A.32,33 B.30,32 C.30,31 D.32,32 6.在一次信息技术考试中,抽得6名学生的成绩(单位:分)如下:8,8,10,8,7,9,则这6名学生成绩的中位数是() A.7 B.8 C.9 D.10 7.一次英语测试后,随机抽取九年级某班5名学生的成绩如下:91,78,98,85,98.关于这组数据说法正确的是() A.中位数是91 B.平均数是91 C.众数是91 D.极差是78 8.小明记录了一星期天的最高气温如下表,则这个星期每天的最高气温的中位数是() 星期一二三四五六日 最高气温(℃)22 24 23 25 24 22 21 A.22℃ B.23℃ C.24℃ D.25℃ 二.填空题(共6小题) 9.某班7名学生的数学考试成绩(单位:分)如下:52,76,80,76,71,92,67 则这组数据的中位数是_分. 10.某校男子足球队的年龄分布如图的条形统计图,则这些足球队的年龄的中位数是_________岁. 11.若一组数据3,4,x,5,8的平均数是4,则该组数据的中位数是_________. 12.在一次数学测试中,小明所在小组6人的成绩(单位:分)分别为84、79、83、87、77、81,则这6人本次数学测试成绩的中位数是_________. 信息采集系统解决方案 1系统概述 信息采集是信息服务的基础,为信息处理和发布工作提供数据来源支持。信息数据来源的丰富性、准确性、实时性、覆盖度等指标是信息服务的关键一环,对信息服务质量的影响至关重要。针对交通流信息数据,包括流量、速度、密度等,目前主要是基于微波、视频、地磁等固定车辆检测器以及浮动车等移动式车辆检测器进行采集,各种采集方式都存在响应的利弊。针对车驾管以及出入境数据,包括车辆信息、驾驶人信息、出入境办证进度信息等,主要是通过和公安相关的数据库进行对接,此类信息将在信息分析处理系统进行详细介绍。 针对目前交通信息来源的多样性以及今后服务质量水平发展对信息来源种类扩展要求,需要建设一套统一的,具备良好兼容性和前瞻性的交通信息统一接入接口。一方面,本期项目的各种交通信息来源可以使用该接口进行数据接入,另一方面,当新的或第三方的交通信息来源需要加入到本系统中来时,可以使用该接口进行数据接入,不需要再次投入资源进行额外开发。 统一接入接口建成后,根据各种数据来源系统的网络环境、系统技术特性和交通流信息数据特点,开发相应的交通信息数据对接程序,逐一完成微波采集系统、浮动车分析系统、人工采集等来源的交通信息数据采集接入。 2系统架构及功能介绍 2.1统一接入接口 统一接入接口的建设的关键任务包括接口技术规范制定、路网路段编码规则约定及交通信息数据结构约定等多个方面。 2.1.1接口技术规范 一方面由于本系统接入的交通信息数据来源多样,开发语言和系统运行的环境均存在差异,不具备统一的技术特性;另一方面,考虑到以后可能需要接入更多新的或第三方的信息系统作为数据来源,应当选择较成熟和通用的接口实现技术作为本项目的交通流信息采集统一接入接口实现技术。 根据目前信息系统建设的行业现状,选择Web Service和TCP/UDP Socket 作为数据传输接口的实现技术是较优的选择。Web Service和TCP/UDP Socket 具有实时性强、通用性强、应用广泛、技术支持资源丰富等优势,可以实现跨硬件平台、跨操作系统、跨开发语言的数据传输和信息交换。 项目实施时需要根据现有的信息采集系统的技术特点来具体分析,以选定采用Web Service或TCP/UDP Socket作为接口实现技术,必要时可以两种方式并举,提供高兼容度的接口形式。 为了保护接入接口及其数据传输的安全性,避免恶意攻击访问,避免恶意数据窃取,可以使用身份认证、加密传输等技术来加以保证。 统一数据采集接口的工作流程可以如下进行: 以地轴和地球赤道面为参照坐标,地球的自转和在黄道面上绕着太阳平移时所形成已知的、在一定周期内有规律的相对于地面的视运行轨迹,我们称之为太阳相对于地球的视运行轨迹,依据这一轨迹的函数方程近似表达式,建立同步跟踪太阳的方法和理论、设计同步跟踪太阳机构。其特征在于用一个电机的日晷机构驱动接收装置跟踪太阳视运行轨迹的三维运动轨迹,其中包括用晷杆机构跟踪太阳的视赤经(时角)轨迹,用数学链与晷杆机构联动的晷盘(修正正弦函数)机构驱动接收装置跟踪太阳的视赤纬轨迹(仰角),能量经接口输出,实现对太阳的实时、同步、连续、高精度、低功耗、线性跟踪太阳视运行轨迹,这种线性跟踪方法我们称之为同步(线性)跟踪方法,其实现机构称之为同步跟踪太阳机构,也称日晷机构。 Take axis and equatorial plane of earth as reference coordinate, the rotation of the earth and its apparent motion path relative to the ground, which is known and regular in certain period, is formed while it translate around the sun in the ecliptic plane, and we call it solar apparent motion trajectory of sun relative to earth. According to functional equation of this trajectory, methods and theory for tracking the sun was built, and tracking machine was designed. Its features are to track solar apparent right ascension path by using a solarium mechanism of motor to drive a receiving device; to track the solar declination path (elevation angle) by using modified sine function mechanism which interconnect with solarium mechanism to drive the receiving devices; energy output by the interface; realize real-time, synchronously, continuously tracking the solar apparent movement path. Such linear tracking method is called synchronous tracking methods, and its realization organization is called synchronous 实时数据采集系统研究 一、生产指挥系统实时数据采集系统的组建 1OPC接口技术。OPC(OLEforProcessControl——用于过程控制的OLE)定义了应用Microsoft操作系统在基于PC的客户机之间交换自动化实 时数据的方法。OPC技术基于COM/DCOM,COM透过一组一组的接口提供服务,所有COM组件的使用者必须透过这些接口来访问组件提供的功能。OPC客户和OPC服务器实行数据交互能够采取同步方式或异步方式。同步方式每一次读数据时读取该组中的所有项,得到返回的数据后在 采集周期内再次发出读取申请,得不到数据就不结束此进程;异步通 讯方式中,客户端把关心的数据点通知Server,并且提供一个回调函数,只相关心的数据发生变化时,OPC服务器才调用其回调函数,通知客户端做相对应的处理。在前期实时数据采集中,绝大多数通讯方式 采用异步方式,在后期的测试中发现几个站队数据采集不上的现象。 分析原因后发现,工控机的OPCServer版本比较低,同时,数采通讯 的优先级别要远远低于工控机本身数据处理的优先级,在有大量的系 统运算时,就会出现服务缓慢或中断的现象。南一、一大队杏V-I原稳、杏三浅冷、六大队深冷都出现了这种现象,如果改成同步通讯方式,持续地发出读取申请,又会增加工控机和数采机的负荷,针对此 问题,研发了单组同步通讯方式,它是同步通讯方式中的一个特例, 这种方式把原数据组中数据项重新分成若干组,采取少量多次的方式 采集,以牺牲部分采集效率为前提,既保证数据采集不中断,又极大 的减小了工控机和前置机的负荷。 2DDE接口技术。DDE是一种动态数据交换机制(DynamicDataExchange,DDE)。使用DDE通讯需要两个Windows应 用程序,其中一个作为服务器处理信息,另外一个作为客户机从服务 器获得信息。客户机应用程序向当前所激活的服务器应用程序发送一 条消息请求信息,服务器应用程序根据该信息作出应答,使用共享的 内存有应用程序之间实行数据交换。数采前置机将通过以上几种接口 方式从工控机(Server端)采集到数据写入实时数据库,形成基础数 企业生产计划和控制中的实时跟踪 供应链管理基于―竞争—合作—协调‖机制、以分布式企业集成合作和协调为保证。企业的决策不再局限于个别的企业框架中,各个企业相互独立又相互依存,正如前面所言,在供应链环境下,企业的决策必然要相互协商。协调供应链的目在于使信息在供应链中的传递更加快捷有效,减少因信息失真而导致生产与实际需求不符现象的发生,使整个供应链能以顾客的需求为中心,而保持步调一致,能够快速响应市场需求变化。 而供应链上企业生产计划决策信息的来源不再限于一个企业内部,还有来自供应链上不同的企业,在这样一个开放的环境中,各企业围绕客户需求这个主线,彼此之间进行信息交换和数据共享,保证彼此计划之间的一致性,使同一供应链上的企业间有效地协同合作与控制。这主要是通过供应链上的信息共享平台来实现,在这个平台上将来自整个供应链上企业的信息集成,对各个企业的生产计划进行合作式调整,而且这个信息平台是围绕客户需求实时变动的,企业可以根据这个信息平台不断更新自己的生产计划。并且这个信息平台在企业遇到特殊情况时,能够为企业进行一种协商式地处理。 随着环境的转变、时代的进步,供应链上企业的角色也不断在变化,企业不再只是单一的角色,一个企业往往担任多种身份,因此企业彼此之间能够相互理解,在考虑共同利益的基础上更快、更好地合作,以达到多赢的局面,提高整个供应链的竞争优势。 信息实时反馈 企业之间进行协同合作,围绕客户需求进行生产,离不开信息的实时反馈。信息的实时反馈使企业生产与供求关系同步进行,消除不确定性对供应链的影响,保证上下游企业生产的协调一致。 首先,企业将客户的需求信息转化为企业的订单信息,企业内部以及供应链上其他企业的一切经营活动就都围绕这个订单进行。信息的实时反馈,贯穿于供应链上各个企业的各个生产环节,通过信息的实时反馈让企业在生产计划与控制过程中对自己的订单进行全面监督与协调检查,有效地计划订单的完成日期和完成工作量度,并对订单进行跟踪监控。企业将各个环节中得到的信息随时随地地传送到网络中,集成到公共的信息平台与其他企业进行共享,相关企业则可以根据波动的信息进行一定范围内的生产计划调整。事后分析订单完成情况,对计划进行比较分析,并进行有效的、切实可行的改进措施。 信息实时反馈通过对企业生产计划和控制中的实时跟踪,保证了上下游企业所需要的实时计划信息,并保持生产计划的有效性。生产控制系统必须建立信息实时反馈机制,才能实现面向客户的数据搜集,生产计划才能够获得必要的信息以实现面向用户的实时计划。 维持排产计划的可行性 工厂日历指明了休息日和其它资源工时的中断,另外还包括车间(或资源)是否以一班, 1基于MATLAB实时串口数据采集与曲线显示
实时数据采集系统方案
特殊三角形:经典同步跟踪训练(附参考答案)
(整理)坐标变换的原理和实现方法
实时数据采集系统方案
实时数据采集系统《项目解决方案》 实时数据采集系统 项目解决方案 0 实时数据采集系统《项目解决方案》 目录 1、背 景 ..................................................................... .................................... 2 1. 1、引 言 ..................................................................... ..................... 2 1(2、项目目 标 ..................................................................... ............. 2 2、应用系统体系结 构 ..................................................................... .............. 3 2.1、实时数据采集系统的原理构架…………………………………..3 、实时 数据采集系统的主要功 能….. ........................................................... .3 3 4、实时数据采集系统主要技术特 征 .............................................................. 4分类讨论同步跟踪配套试题
FAUNC同步跟踪
坐标变换就是两种坐标类型
数据采集系统的历史与发展
三相坐标系和二相坐标系转换
第14章 控制与控制过程同步练习
坐标转换方法
生产现场实时数据采集解决方案
华师版八下数学数据的集中趋势同步跟踪训练(考点+分析+点评)
信息采集系统解决方案
同步跟踪技术定义
实时数据采集系统研究
企业生产计划和控制中的实时跟踪
相关主题
文本预览