
5.1直线电机二维静态磁场分析
为了简化分析过程,假设本文分析模型边界上没有漏磁(即磁通量与边界平行)。原有直线电机的外铁芯是分成两块,现在合并成一块可以减小漏磁通,改善了直线电机的性能。原有装配图中直线电机的磁回路比较复杂,为分析方便将其简化为二维轴对称模型。二维静态磁场的有限元分析有以下几个步骤:
1.创建物理环境
2.建立模型,对模型的不同区域赋材料特性,划分网格
3.施加边界条件和载荷
4.求解
5.后处理(查看计算结果)
5.1.1创建物理环
境
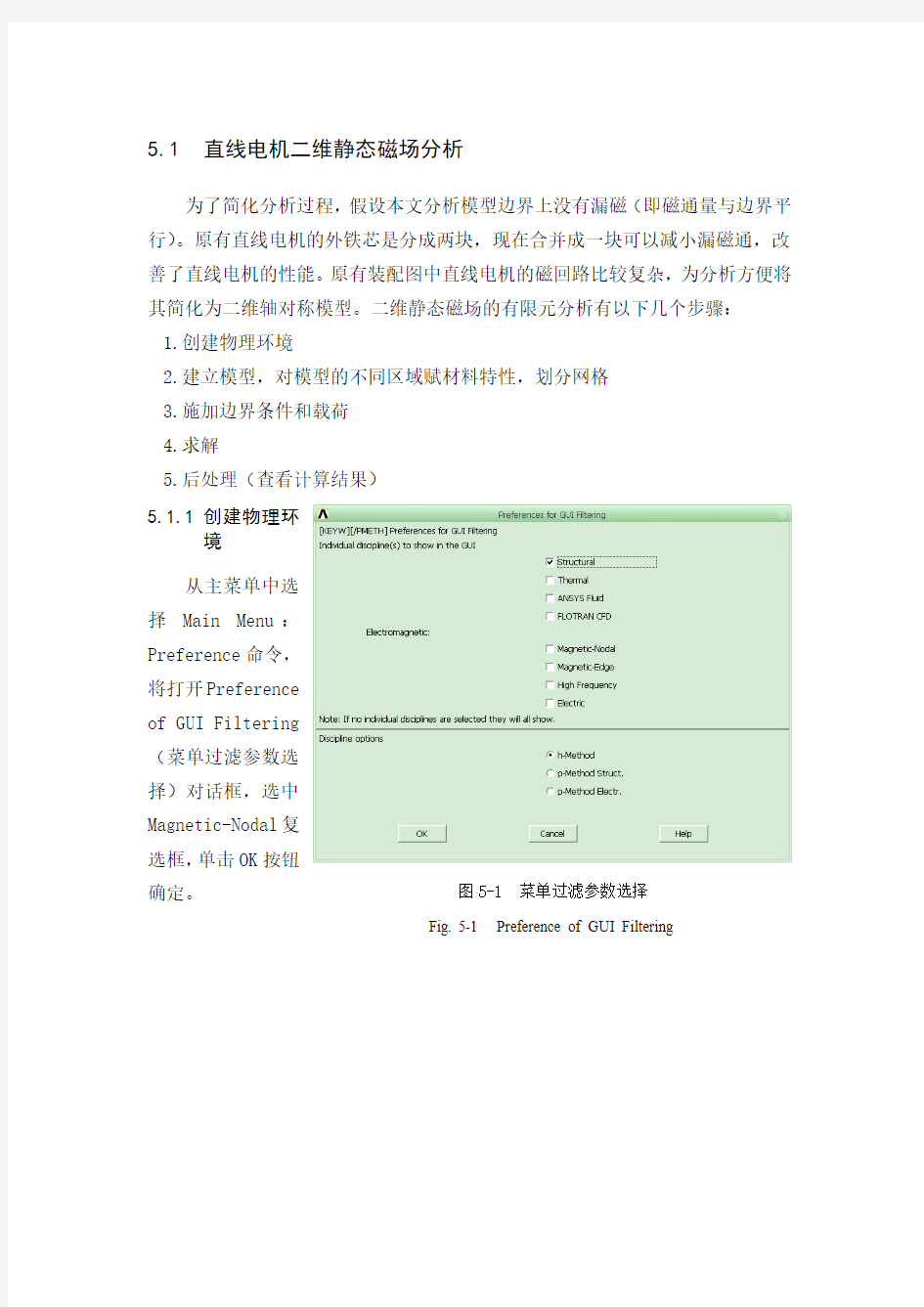
从主菜单中选择Main Menu:Preference命令,将打开Preference of GUI Filtering (菜单过滤参数选择)对话框,选中Magnetic-Nodal复选框,单击OK按钮确定。
图5-1 菜单过滤参数选择Fig. 5-1 Preference of GUI Filtering
定义单元类型和选项:根据论文分析模型的结构选择Vect Quad 4node13单元表示所有区域,包括铁芯、线圈、线圈骨架及空气(如图5-2)。相应操作为:Main Menu>Preprocessor>Element Type>Add/Edit/delete>Add 。文中把磁路模型简化成二维轴对称来分析,所以在单元类型选项中选择轴对称,如图5-3所示:
5.1.2 磁路模型的建立及网格划分
定义材料特性:直线电机内部结构比较复杂,由多种材料构成,如内铁芯、外铁芯、线圈、线圈骨架、空气等。在有限元求解过程中为了考虑实际材料特性的影响,需要对直线电机内部不同面域设置并分配相应的材料属性(如图5-4):
1.线圈骨架(YL12):相对磁导率MURX=l.0;
2.线圈(铜漆包线):相对磁导率MURX=l.0;
3.空气:相对磁导率MURX=l.0;
4.内铁芯和外铁芯(工业纯铁DT4):B-H 磁化特性曲线(如图5-5,5-6所示)。
图5-2 定义单元类型 Fig. 5-2
Define element type
图5-3 单元类型选项 Fig. 5-3
The options of element type
图5-4 定义材料特性
Fig. 5-4
Defining materials performances
图5-5 纯铁(DT4)磁化曲线 Fig. 5-5 Magnetization curve of pure iron
建模:由于将直线电机磁路简化为二维轴对称模型(对称轴为模型左边线),再结合磁路结构尺寸,利用ANSYS 中的Modeling 功能建立磁路的二维模型。磁路模型包括线圈骨架、线圈、铁芯、空气,如图5-7所示:
将上面定义的各种材料属性分别赋予相应的几何面域,然后通过Glue 命令将具有不同材料属性的各面域融合到一起,使各结构边界融合、粘结为一体,使第二类边界条件得到满足。
图5-6 工业纯铁(DT4)BH 值的输入 Fig. 5-6
The BH values input of pure iron
图5-7 直线电机磁路模型
Fig. 5-7
The magnetic loop model of linear motor
图5-8 划分网格后的模型 Fig. 5-8 The model after meshing
有限单元网格化分:采用智能网格划分,精度为5,并按材料属性显示面。如图5-8所示。 5.1.3 定义边界条件
设置电机参数,如图5-9所示。 对于二维静态磁场分析来讲,边界条件和载荷可以施加在实体模型上或者有限元模型上。在有限元分析过程中,ANSYS 可以自动把施加在实体模型上的边界和载荷转移到有限元模型上。
边界条件:在铁芯和骨架支撑边缘上加边界条件Az=O(如图5-10所示外边缘定义为零磁势边界条件), 满足第一类边界条件即齐次边界条件;
施加载荷:对绕组区域(材料编号为2)施加电流载荷,根
据计算公式jdens =acoil I
n 在电
流密度值后面输入5.125e5,如下图5-11所示。
图5-9 参数输入窗口
Fig. 5-9
The parameters input window
图5-10 设置边界条件 Fig. 5-10
Setting boundary condition
图5-11 施加电流密度对话框
Fig. 5-11 The window of setting current density
5.1.4 求解及后处理
求解:从主菜单中选择Main Menu>Solution>Solve>Electromagnet>Static Analysis>Opt&Solv ,接受默认设置,单击OK 确定。直到出现“Solution is done!”提示,表示结束。保存文件。
5.3.5 分析
由直线电机的工作原理可以知道,模型中线圈处的磁力线、磁通量、场强、受力
图5-12 磁力线分布
Fig.5-12
Magnetic force line distribution
图5-13 磁通量密度分布 5-13
Magnetic flux density distribution
图5-14 磁场强度分布
Fig. 5-14
Magnetic intensity distribution
图5-15 电磁力分布
Fig.5-15
Magnetic force distribution
分布越均匀,直线电机的工作性能越好。在以上四幅图中,线圈中上部的磁力线和磁通量分布较为均匀,下部由于铁芯局部漏磁,而导致不均匀;而场强和电磁力则是在空气和线圈骨架连接处分布较大,其他地方分布较小。这是由于直线电机受到材料导磁性能不同、铁芯边缘存在漏磁现象等因素的影响,从而造成的。由分析可得,可以通过减小线圈部分的距离、选用优质的材料等措施缓解。但在实际选用的时候,还应综合考虑材料的重量、线圈通电受热、以及线圈骨架受热膨胀等方面的问题。
横向磁场永磁电机的发展和研究现状 【摘要】横向磁场永磁电机因其高转矩密度和高效率的优点,吸引各国电机设计人员们对其结构设计、制造工艺、磁场分析及运行性能等方面展开了具体研究。在查阅现有的国内外相关文献资料的基础上,系统介绍了横向磁场永磁电机的主要拓扑结构的特点,分析了当前国内外横向磁场电机的主要研究方向,最后对其应用前景进行了展望。 【关键词】横向磁场;拓扑结构;自定位转矩;功率因数 1.引言 横向磁场永磁电机(Transverse Flux Permanent Magnet Machine,简称TFPM)是由德国著名电机专家H.Weh教授率先于1986年提出的一种新型电机结构,与传统电机相比,横向磁场电机具有以下特点[1][2]: (1)电机的每相都完全独立,因此相与相之间没有电磁耦合,可提高电机的容错能力。 (2)电机磁路呈三维分布,磁路与电路(线圈部分)处于不同平面,定子尺寸和线圈尺寸相互独立,从而使TFPM能够同时获得较大的定子齿横截面和线圈横截面,大大提高了电机的转矩密度,其输出大约是标准工业用异步电机的5~10倍。 (3)在保持转速、电机主要尺寸、气隙磁密等参数不变时,TFPM的功率与电机的极对数成正比,适用于低速、大转矩场合。 近几年来,随着电动车、电力直接推进装置和风力发电技术研究的深入,对高转矩密度、低速直接驱动电机的要求更为迫切,于是横向磁场永磁电机因其上述优点成为了新型电机的研究热点之一。许多欧美经济发达国家投入了大量的人力、物力和财力进行横向磁场电机的理论和应用研究,丰富了横向磁场永磁电机的拓扑结构,促进了横向磁场电机的发展。本文较系统地介绍分析了当前横向磁场永磁电机的主要拓扑结构,阐述了当前国内外横向磁场电机的主要研究方向和方法,并对横向磁场电机存在的问题也做了简单介绍。 2.横向磁场电机的拓扑结构形式 按照永磁体的有无及安装方式来分,横向磁场电机拓扑结构可以分为四类:平板式、聚磁式、无源转子式和磁阻式[3]。 图1为德国亚琛的G.Henneberger教授设计的外转子平板式横向磁场永磁电机。这种结构中,永磁体被均匀地平铺于转子表面,相邻的永磁体被充磁成不同的极性,充磁方向一般为径向,U形定子铁心以两倍极距均匀分布在圆周上,其
所谓线性马达又称为直线电机,是一种将传统的旋转电机沿轴线方向切开后,将旋转电机的初 级展开作为直线电机(线性马达)的定子,次级通电后在电磁力的作用下沿着初级做直线运动,成为直线电机(线性马达)的动子。 我们常说的磁悬浮,往往和直线电机(线性马达)驱动有着很大联系。磁浮运输系统通常采用“线性马达”也就是直线电机作为推进系统的。 线性马达的构成原理 设靠三相交流电力励磁的移动用电磁石 (作为定子),分左右两排夹装在铝板两旁 (但不接触),磁力线与铝板垂直相交,铝板即感应而生电流,因而产生驱动力。由于线性感应马达的定子装在列车上,较导轨短,因此线性感应马达又称为“短定子线性马达”(Short-stator Motor);线性同步马达的原理则是将超导电磁石装于列车上 (当作转子),轨道上则装有三相电枢线圈 (作为定子),当轨道上的线圈供应以可变周波数的三相交流电时,即能驱动车辆。由于车辆移动的速度系依与三相交流电周波数成比例的同步速度移动,故称为线性同步马达,而又 由于线性同步马达的定子装于轨道上,与轨道同长,故线性同步马达又称为“长定子线性马 达”(Long-stator Motor)。 传统轨道运输系统由于使用专用轨道,并以钢轮作为支撑与导引,因此随着速度的增加, 行驶阻力会递增,而牵引力则递减,列车行驶阻力大于牵引力时即无法再加速,故一直无法突 破地面运输系统理论上最高速度每小时375公里的瓶颈。虽然法国TGV曾创下传统轨道运输系统时速515.3公里的世界纪录,但因轮轨材料会有过热疲乏的问题,故现今德、法、西、日等 国之高铁商业营运时速均不超过300公里。
因此,如要进一步提升车辆速度,必须放弃传统以车轮行驶之方式,而采用“磁力悬 浮”(Magnetic Levitation,简称“磁浮”Maglev) 的方式,使列车浮离车道行驶,以减少摩 擦力、大幅提高车辆的速度。此一浮离车道的作法,除不会造成噪音或空气污染外,并可增进 能源使用之效率。另外采用“线性马达”(Linear Motor) 亦可加快该磁浮运输系统的速度, 因此使用线性马达的磁浮运输系统应运而生。 所谓磁浮运输系统就是利用磁力相吸或相斥的原理,使列车浮离车道,此磁力的来源可分 为“常电导磁石”(Permanent Magnets) 或“超导磁石”(Super Conducting Magnets, SCM)。所谓的常电导磁石就是一般的电磁铁,即只有通电时才具有磁性,电流一切断则磁性消失,由 于列车在极高速时集电困难,故常电导磁石仅能适用于采用磁力相斥原理、速度相对较慢 (约300kph) 的磁浮列车;至于速度高达500kph以上的磁浮列车 (利用磁力相吸原理),就非使用 通一次电就永久具有磁性 (因此列车可以不用集电) 之超导磁石不可。 因磁浮运输系统是利用磁力相吸或相斥的原理,故导致其分为“电动悬 浮”(Electrodynamic Suspension, EDS) 与“电磁悬浮”(Electromagnetic Suspension, EMS) 两种型态。电动悬浮 (EDS) 是利用同性相斥的原理,当列车经由外力而移动,装置于列车上的常电导磁石产生移动磁场,而在轨道上的线圈产生感应电流,此电流再生磁场,由于此二磁场 方向相同,故列车与轨道间产生互斥力,列车随即由此互斥力举升而悬浮。因列车的悬浮是靠 两磁场作用力相互平衡而达成,故其悬浮高度可固定不变 (约10 ~ 15mm),列车即因此具有相 当之稳定性。此外,列车必须先以其他方式启动,其所带之磁场才能产生感应电流与磁场,车 辆才会悬浮;因此,列车必须装置车轮以便“起飞”与“降落”之用,当速度达40kph以上时,列车开始悬浮 (即“起飞”),车轮自动收起;同理当速度渐减不再悬浮时,车轮自动放下以便滑行 (即“降落”)。通常采用电动悬浮 (EDS) 的系统,只能以“线性同步马达”(Linear Synchronous Motor, LSM) 作为推进系统,且其速度相对较慢 (约300kph)。 电动悬浮系统 (EDS) 与线性同步马达 (LSM) 的组合 电磁悬浮 (EMS) 则是利用异性相吸的原理,列车两侧向导轨环抱 (类似跨座式单轨系统),列车环抱的下部装有电磁石,导轨的底部装有钢板代替线圈,此时导轨之钢板在上,而列车之 电磁石在下,当通电励磁时,电磁石产生之磁场吸引力吸引列车向上,列车因重力而下沉,两
《数控技术》大作业二 1.综述 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级线圈之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动.通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设产生涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将(费来明法则)产生连续的推力F。 2.工作原理 直线电动机的初级三相绕组通入三相交流电后,就会在气隙中产生一个沿直线移动的正弦波磁场,其移动方向由三相交流电的相序决定,如图所示。显然该行波磁场的移动速度与普通电机旋转磁场在定子内圆表面的线速度相等。 行波磁场切割次级上的导体后,在导体中感应出电动势和电流,该电流与气隙磁场作用,在次级中产生电磁力,驱动次级沿着行波磁场移动的方向作直线运行,或者利用反作用力驱动初级朝相反的方向运动。如果改变直线电动机初级绕组的通电相序,即可改变电动机的运行方向。因此直线电动机可实现往返直线运动。 3.直线电机的特点 直线电机是一种将电能直接转换成直线运动机械能而不需通过中问任何转换装置的新颖电机,它具有系统结构简单、磨损少、噪声低、组合性强、维护方便等优点。旋转电机所具有的品种,直线电机几乎都有相对应的品种,其应用范围正在不断扩大,并在一些它所能独特发挥作用的地方取得了令人满意的效果。 直线感应电动机的特点是:结构简单,维护方便;散热条件好,额定值高;适宜于高速运行;能承担特殊任务,如液态金属的运输、加工等。其缺点是气隙大,功率因数低,力能指标差,低速运行时需采用低频电源,使控制装置复杂。 4.直线电机的应用
喏名L 乃农别名阄2018,45 (2)研究与设计I EMCA U 型无铁心永磁同步直线电机磁场建模与分析 李争",张家祯",王群京2 (1.河北科技大学电气工程学院,河北石家庄 050018; 2.安徽大学高节能电机及控制技术国家地方联合工程实验室,安徽合肥230601) 摘要:传统的铁心式直线电机由于铁心开断的影响,造成了横向和纵向边端效应,使推力输出波动较 大;无铁心 直线电机 槽 的优点,结构简单,控制灵活。采两种 铁心 直线电机 的问题, 和 电 , 采 电机 , 验 计算的 。 电机 的影响。 电机 , 了 优化设计,为 电机的设计与 了 。 关键词:无铁心"直线电机;磁场分析;解析法"有限元法中图分类号: TM 351 文献标志码:A 文章编号:1673-6540(2018)02-0075-06 Magnetic Field Modeling and Analysis of U-Shaped Ironless Permanent Magnet Synchronous Linear Motor * Ll Zheng 1, ZHANG Jiazhen 1, WANG Qunjing 2 (1. School of Electrical Engineering,Hebei University of Science and Technology,Shijiazhuan 2. National Engineering Laboratory of Energy-saving M otor & Control Technique,Anhui University , Hefei 230601,China ) Abstract : Due t o the influence of tlie core breaking ,the traditional iron core linear motor had the end-effect of lateral and vertical side ,which m ade the output of the thrust line fluctuate greatly. The ironless permanent magnet synchronous linear motor has the advantages of zero slot effect , simple structure and flexible control. Based on the analysis of air gap magnetic field ironless permanent magnet synchronous linear motor problems by using two kinds of analytical method ,namely e quivalent magnetic potential method and the equivalent magnetizing current method ,and the finite element analysis of the magnetic field using the finite element method. The analytical m field analysis was verified to be accurate. By changing the motor parameters ,the optimization design was achieved , which provided the r eference for the design and analysis of same kind of motors. Key words : ironless ; linear motor ; magnetic field analysis ; analytical method ; finite element method 0 ^ * 更小、效率更高,系统的精度、稳定性和响应速度0 能 优越。齿槽 和端 直线电机把电能直 成直线推 于铁心式 直线电机中,会造成电机动态动力能的 ,与传统的 电 机 ,直线电机 能差、振动 高、系统 ,影响电机 传动 , 统结构更简单、 和 [1]; 铁心 直线电 *基金项目:国家自然科学基金项目(51577048,51637001,51107031);河北省留学人员科技活动项目择优项目(C 2015003044);高节 能电机及控制技术国家地方联合工程实验室开放课题基金项目( K F K T 201601) 作者简介:李争(1980—),男,博士,教授,硕士生导师,研究方向为特种电机及其控制。 张家祯(1993—),女,硕士研究生,研究方向为直线电机设计与控制技术。王群京(I 960—),男,博士,教授,博士生导师,研究方向为电机及其控制技术。 一 75 —
,提高系统精确度,所以得到广泛的应用。直线电动机的种类按结构形式可分为;单边扁平型、双边扁平型、圆盘型、圆筒型(或称为管型)等;按工作原理可分为:直流、异步、同步和步进等。下面仅对结构简单,使用方便,运行可靠的直线异步电动机做简要介绍。 直线异步电动机的结构主要包括定子、动子和直线运动的支撑轮三部分。为了保证在行程范围内定子和动子之间具有良好的电磁场耦合,定子和动子的铁心长度不等。定子可制成短定子和长定子两种形式。由于长定子结构成本高、运行费用高,所以很少采用。直线电动机与旋转磁场一样,定子铁心也是由硅钢片叠成,表面开有齿槽;槽中嵌有三相、两相或单相绕组;单相直线异步电动机可制成罩极式,也可通过电容移相。直线异步电动机的动子有三种形式: (1)磁性动子动子是由导磁材料制成(钢板),既起磁路作用,又作为笼型动子起导电作用。 (2)非磁性动子,动子是由非磁性材料(铜)制成,主要起导电作用,这种形式电动机的气隙较大,励磁电流及损耗大。 (3)动子导磁材料表面覆盖一层导电材料,导磁材料只作为磁路导磁作用;覆盖导电材料作笼型绕组。 因磁性动子的直线异步电动机结构简单,动子不仅作为导磁、导电体,甚至可以作为结构部件,其应用前景广阔。 直线异步电动机的工作原理和旋转式异步电动机一样,定子绕组与交流电源相连接,通以多相交流电流后,则在气隙中产生一个平稳的行波磁场(当旋转磁场半径很大时,就成了直线运动的行波磁场)。该磁场沿气隙作直线运动,同时,在动子导体中感应出电动势,并产生电流,这个电流与行波磁场相互作用产生异步推动 直线异步电动机主要用于功率较大场合的直线运动机构,如门自动开闭装置,起吊、传递和升降的机械设备,驱动车辆,尤其是用于高速和超速运输等。由于牵引力或推动力可直接产生,不需要中间连动部分,没有摩擦,无噪声,无转子发热,不受离心力影响等问题。因此,其应用将越来越广。直线同步电动机由于性能优越,应用场合与直线异步电动机相同,有取代趋势。直线步进电动机应用于数控绘图仪、记录仪、数控制图机、数控裁剪机、磁盘存储器、精密定位机构等设备中。
第六章3-D静态磁场分析(棱边单元方法) 6.1何时使用棱边元方法 在理论上,当存在非均匀介质时,用基于节点的连续矢量位A来进行有限元计算会产生不精确的解,这种理论上的缺陷可通过使用棱边元方法予以消除。这种方法不但适用于静态分析,还适用于谐波和瞬态磁场分析。在大多数实际3-D 分析中,推荐使用这种方法。在棱边元方法中,电流源是整个网格的一个部分,虽然建模比较困难,但对导体的形状没有控制,更少约束。另外也正因为对电流源也要划分网格,所以可以计算焦耳热和洛伦兹力。 用棱边元方法分析的典型使用情况有: ·电机 ·变压器 ·感应加热 ·螺线管电磁铁 ·强场磁体 ·非破坏性试验 ·磁搅动 ·电解装置 ·粒子加速器 ·医疗和地球物理仪器 《ANSYS理论手册》不同章节中讨论了棱边单元的公式。这些章节包括棱边分析方法的概述、矩阵列式的讨论、棱边方法型函数的信息。 对于ANSYS的SOLID117棱边单元,自由度是矢量位A沿单元边切向分量的积分。物理解释为:沿闭合环路对边自由度(通量)求和,得到通过封闭环路的磁通量。正的通量值表示单元边矢量是由较低节点号指向较高节点号(由单元边连接)。磁通量方向由封闭环路的方向根据右手法则来判定。 在ANSYS中,AZ表示边通量自由度,它在MKS单位制中的单位是韦伯(Volt·Secs),SOLID117是20节点六面体单元,它的12个边节点(每条边
的中间节点)上持有边通量自由度AZ。单元边矢量是由较低节点号指向较高节点号。在动态问题中,8个角节点上持有时间积分电势自由度VOLT。 ANSYS程序可用棱边元方法分析3-D静态、谐波和瞬态磁场问题。(实体模型与其它分析类型一样,只是边界条件不同),具体参见第7章,第8章。 6.2单元边方法中用到的单元 表 1三维实体单元 6.3物理模型区域的特性与设置 对于包括空气、铁、永磁体、源电流的静态磁场分析模型,可以通过设置不同区域不同材料特性来完成。参见下表,详情在后面部分叙述。
第29卷第9期中国电机工程学报V ol.29 No.9 Mar.25, 2009 98 2009年3月25日 Proceedings of the CSEE ?2009 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2009 09-0098-06 中图分类号:TM 351;TM 359 文献标志码:A 学科分类号:470?40 永磁直线电机精确相变量建模方法 曾理湛1,陈学东1,李长诗2,农先鹏1,伞晓刚1 (1. 数字制造装备与技术国家重点实验室(华中科技大学,湖北省武汉市 430074; 2. 郑州轻工业学院机电工程学院,河南省郑州市 450002 Accurate Phase Variable Modeling of PM Linear Motors ZENG Li-zhan1, CHEN Xue-dong1, LI Chang-shi2, NONG Xian-peng1, SAN Xiao-gang1 (1. State Key Laboratory of Digital Manufacturing Equipment & Technology (Huazhong University of Science and Technology, Wuhan 430074, Hubei Province, China; 2. College of Mechanical and Electrical Engineering, Zhengzhou University of Light Industry, Zhengzhou 450002, Henan Province, China ABSTRACT: This paper proposes a general finite element (FE based phase variable modeling method of permanent magnet (PM linear motors for the accurate dynamic simulation of drive systems. A general phase variable model of PM linear motors is established taking account of the effects of the nonideal geometrical structure on the thrust force, in which the mover position dependent variables are obtained from FE
第10卷 第1期2006年1月 电 机 与 控 制 学 报 EL EC TR IC MACH I N ES AND CON TROL Vol 110No 11Jan .2006 一种微小型永磁直流直线电机 王坤东, 颜国正 (上海交通大学电信与电气工程学院820所,上海200030) 摘 要:针对永磁直流直线电机的微型化问题,提出了近似拼接的设计方案,优化了结构参数,并 加工出样机进行了试验。在尺寸所限下,该电机使用多个长方体永磁块拼接的正八边形来近似逼近全径向磁化管形磁铁励磁。利用有限元分析软件Max W ell910优化了气隙和磁铁厚度等结构参数。对样机进行了试验分析,结果表明电机驱动力和电流呈线性关系,在整个行程中,输出力均匀,驱动力在电流01004A 时可达0172N,线圈温度在5516°C 。关键词:微小型;永磁;直线电机;有限元优化 中图分类号:T M351 文献标识码:A 文章编号:1007-449X (2006)01-0070-04 A m i n i a ture per manent magnet li n ear DC motor WANG Kun 2dong, Y AN Guo 2zheng (School of Electrical and I nf or mati on Eng .,Shanghai J iaot ong Univ .,Shanghai 200030,China ) Abstract:This paper p resented a method based on j ointed per manents for m iniature of DC linear mot or .Structural para meters were op ti m ized .Pr ot otype was manufactured t o make s ome experi m ents .Under the constraint of m icr o di m ensi on,several rectangular per manent magnets were j oined t o be octagon,whose field app r oaches the filed of tube 2shaped per manent magnetized at radial directi on .Based on the FEA s oft w are Max W ell 910,the structural para meters such as dep th of air gap and per manent magnet were op 2ti m ized .The characters of mot or are analyzed thr ough experi m ents .Research de monstrates that driving f orce is p r oporti onal with the current,and driving force is stable in the whole str oke,and driving force reaches 0172N when the current strength is 01004A ,and the te mperature of coil rises t o 5516°C .Key words:m iniature;per manent;linear mot or;FE op ti m is m 收稿日期:2004-10-21;修订日期:2005-06-15 基金项目:国家高技术研究发展计划(863)资助项目(2001AA422210) 作者简介:王坤东(1978-),男,博士研究生,研究方向为微型特种机器人; 颜国正(1960-),男,博士后、教授、博士生导师,研究方向为特种机器人、仿生机械。 1 引 言 在微小空间进行作业的行走机构,如工业细小管道或人体消化道的检测机器人等,要求直径在10~15mm 之间,同时对驱动技术也提出了新的要求, 如驱动力大、控制方便、可靠等[1,2] 。微型旋转电机受尺寸的限制,加上将旋转运动变为直线运动的中间机构也占有一定空间,因此将外形尺寸控制在直径为10mm 以下比较困难 [3] 。压电驱动器行程较 短,一般都是在μm 量级,存在如何将位移进行放大 的问题,而且驱动力很难控制[4] 。形状记忆合金驱动器由于记忆合金的加热变形—冷却回复的时间较 长,因此速度较慢[5] 。直线电机是近年来出现的一种新型驱动技术,它将电能直接转换为直线运动的机械能,不需要运动转换的中间机构,因此结构尺寸上能够进一步减小。直线电机种类繁多,其中永磁直流直线电机由永磁励磁,结构简单,控制方便。从现有的产品看,还没有出现直径在10mm 以下的圆
第27卷第24期中国电机工程学报V ol.27 No.24 Aug. 2007 2007年8月Proceedings of the CSEE ?2007 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2007) 24-0058-05 中图分类号:TM341 文献标识码:A 学科分类号:470?40 新型横向磁通永磁电机磁场研究 褚文强,辜承林 (华中科技大学电气与电子工程学院,湖北省武汉市 430074) Study on Magnet Field of Novel Transverse-flux Permanent Magnet Machine CHU Wen-qiang, GU Cheng-lin (College of Electrical and Electronic Engineering, Huazhong University of Science and Technology, Wuhan 430074, Hubei Province, China) ABSTRACT: Firstly,a novel transverse-flux permanent magnet machine(TFPMM) is introduced.Then its no-load magnetic field is analyzed, including flux curve, the influence of different air gap/permanent magnet weight on magnetic field. Beside its cogging torque is also calculated.Finally, The experimental data is given and compared with the magnetic field computation results to prove the method above is available. KEY WORDS: transverse-flux; permanent-magnet machine; magnetic field computation 摘要:简要介绍了一种新型横向磁通电机,然后针对该电机进行了空载磁场分析,给出了磁通变化曲线,分析了气隙长度、永磁体宽度对磁场的影响,同时还计算了电机定位力矩。给出了样机实验数据,并与磁场计算结果进行了对比分析,比较结果说明以上方法是有效的。 关键词:横向磁通;永磁电机;磁场计算 0 引言 横向磁通永磁电机(Transverse-flux permanent magnet machine,TFPMM)是20世纪80年代末由德国的H.Weh教授提出的一种新型电机结构形式[1-2]。磁路结构的改变使其从理论上克服了传统电机齿槽位于同一截面,几何尺寸相互制约,电机转矩难以根本提高的缺陷,特别适合低速、大转矩、直接驱动等应用场合。德国于1988年率先研制了首台45kW横向磁通永磁电机样机,1999年又将TFPMM作为电动车发展优选部件之一;英国Rolls- Royce国际研发中心于1997年设计并制作了3.0MW采用C形定子铁心的TFPMM样机,目前正在研制16相20MW横向磁通永磁电机[3-5];美国通用汽车Allsion传动部着手于研究复合软磁材料(SMC)成形定子的横向磁通电机和爪形齿横向磁通电机,并研制了30kW电动车用横向磁通电机[6-8];国内对横向磁通电机的研究开展较晚,但目前已有不少样机研制成功[9-11]。此外TFPMM还被应用于磁悬浮[12-14]、风力发电、直线驱动[15]等领域。但是上述各种拓扑结构都存在工艺复杂,加工困难,基本上不适合中小功率低速直驱式场合应用。文献[16]提出了一种新型TFPMM拓扑形式,简化了电机结构,降低了对制造工艺的要求,使得TFPMM有可能应用于中小功率场合。本文在文献[16]基础上,利用有限元方法分析了该电机的空载磁场,给出了磁通变化曲线,分析了气隙长度、磁体宽度对磁场的影响,同时还计算了定位力矩,最后对样机的实验数据进行了比较分析。 1 新型横向磁通永磁电机 TFPMM磁路呈三维分布,其拓扑结构变化较为丰富,按其永磁转子结构和磁路特点,可以分为平板式、聚磁式、磁阻式、无源转子式4类[17]。文献[16]正是在德国G.Henneberger教授设计的单边定子平板式TFPMM结构[18]基础上提出一种新型横向磁通电机拓扑结构(内定子、外转子),其定转子结构如图1、2所示,主要结构特点如下: (1)永磁体轴向磁化,相邻磁体极性相反,各相磁体(2p个)沿转子内表面均布,m相磁体轴向分隔,周向对齐。 (2)U形磁轭以两倍极距均布(每相p个),各相独立,三相定子轴向互错120o电角度被固定在非磁性定子支架上。 (3)电枢绕组由同心绕制在U形磁轭中的周向线圈组成。
直线电机的工作原理 直线电机是一种将电能直接转换成直线运动机械能,而不需要任何中间转换机构的传动装置。它可以看成是一台旋转电机按径向剖开,并展成平面而成,如图1所示。 由定子演变而来的一侧称为初级,由转子演变而来的一侧称为次级。在实际应用时,将初级和次级制造成不同的长度,以保证在所需行程范围内初级与次级之间的耦合保持不变。直线电机可以是短初级长次级,也可以是长初级短次级。考虑到制造成本、运行费用,目前一般均采用短初级长次级。 直线电动机的工作原理与旋转电动机相似。以直线感应电动机为例:当初级绕组通入交流电源时,便在气隙中产生行波磁场,次级在行波磁场切割下,将感应出电动势并产生电流,该电流与气隙中的磁场相作用就产生电磁推力。如果初级固定,则次级在推力作用下做直线运动;反之,则初级做直线运动。 直线电机的优缺点介绍
直线电机是一种将电能转化为动能的机械装置,通常应用于工业生产当中。与直线电机相对应的一种装置是旋转电机,两者的工作原理类似。但是直线电机是进行直线运动的电机,而旋转电机是进行旋转运动的电机。直线电机可以直接将电能转化为动能,而不需要中间装置。 直线电机的优点 直线电机一般有平板式、U型式、管式几种。直线电机的工作系统是通过内部直线导轨来完成工作,用环保材料将线圈压缩成电路板的动子和电热调节器连接,然后在稀土磁铁的磁轨上进行动力推动,不需要像旋转电机一样,将动子固定在旋转轴承的支撑架上来保证相
对运动部分的稳定,通过直接反馈位置的直线编码器装置,就可以直接测量负载位置,从而保证负载位置的精确度。 由上看出,直线电机因为不需要中间转换装置,所以操作简单,非常适合进行非离心力的运动。直线电机的优势主要有以下几点: 首先,结构简洁。直线电机直接产生直线运动,位置精确度高,更为节省成本、稳定可靠、操作和维护简便。 第二,运动效率高。直线电机的气垫和磁垫中间存在缝隙,在运动时,不会出现机械接触,也不会出现摩擦和噪音,对零部件的损伤较小,从而具有较高的工作效率,可以进行高速直线运动。
一周总结报告 一、ANSYS学习 1.学习情况 目前正在边看书籍边操作ANSYS系统,已经了解了ANSYS的基本操作系统以及ANSYS 分析过程的三大步骤,大体上知道了它的整个工作流程。目前正在深入仔细学习每一部分的详细步骤。现在已经学习了ANSYS有限元分析典型步骤、实体建模、网格划分、创建有限元模型,正在学习加载和求解这一部分。 2.理论知识 (1)网格划分与创建有限元模型 ①设置单元属性,包括: a.选择单元类型,如常用的有PLANE13,PLANE53,INFIN110;在Element Type中设 置; b.设置单元实常数,如线圈横截面积、匝数、导体填充率等; c.设置材料属性,如泊松比、材料密等; d.设置单元坐标系统。 ②通过网格划分工具设置网格划分属性包括: a.单元属性分配设置,作用是在网格划分之前为模型(包括实体和有限元模型)分配单元属性; b.智能划分水平控制; c.单元尺寸控制,单元尺寸的意思是单元边的长度。 ③实体模型的划分 ANSYS有两种方式对实体模型进行网格划分。 映射网格划分方法:最大特点就是必须使用形状规则的单元划分,对于面对象必须使用三角形单元或四边形单元,对于体对象只能使用六面体单元。故划分对象必须形状规则。不是任何形状的对象都能用映射网格划分。 (2)加载和求解 有限元分析的主要目的在于得到系统在特定激励源和边界条件下的响应。这些激励以及边界条件统称为载荷。所以载荷包括边界条件和激励。磁场分析中常见的载荷有磁势、磁通量边界条件等。 载荷分为六大类:自由度约束、集中力载荷、面载荷、体载荷、惯性载荷以及耦合场载荷。关于载荷步、子步和平衡迭代,通过阅读理论知识自己的理解的总结是:一个实际加载过程需要多次施加不同的载荷才能满足要求,每一步就称为一个载荷步。一个载荷步可以通过多个子步来逐渐施加。平衡迭代用于考虑收敛的非线性分析。 3.仿真结果 目前按照教程的步骤将ANSYS从建立模型到加载求解再到查看后处理器的整个分析过程大体操作了一遍,目的就是先通过简单模型熟练ANSYS的整体操作。最终的分析结果如图所示。 4.下周计划 (1)学习ANSYS通用后处理器以及时间历程后处理器; (2)目前只是跟着书上的步骤可以进行操作,还得进一步熟练; (3)目前主要是用GUI方式进行,下一步要更加熟练使用命令流的操作方式。
直线电机的结构及工作原理 来源:本站整理作者:佚名2010年02月25日 17:43 分享 订阅 [导读]直线电机的结构直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相 关键词:直线电机 直线电机的结构 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理 设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动. 通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设引起涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将按费来明法则产生连续的推力F。 直线电机的特点 高速响应由于系统中直接取消了一些响应时间常数较大的如丝杠等机械传动件,使整个闭环控制系统动态响应性能大大提高,反应异常灵敏快捷。 位精度高线驱动系统取消了由于丝杠等机械机构引起的传动误差减少了插补时因传动系统滞后带来跟踪误差。通过直线位置检测反馈控制,即可大大提高机床的定位精度。传动环节的弹性变形、摩擦磨损和反向间隙造成的运动滞后现象,同时提高了其传动刚度。 速度快、加减速过程短 行程长度不受限制在导轨上通过串联直线电机,就可以无限延长其行程长度。 动安静、噪音低由于取消了传动丝杠等部件的机械摩擦,且导轨又可采用滚动导轨或磁垫悬浮导轨(无机械接触),其运动时噪音将大大降低。 效率高由于无中间传动环节,消除了机械摩擦时的能量损耗。 直线电机的应用 直线电机主要应用于三个方面: 应用于自动控制系统,这类应用场合比较多; 作为长期连续运行的驱动电机; 应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 U槽无刷直线电机可以直接驱动,无需将转动转为线性运动,机械结构简单可靠。电机运行超平稳,无齿槽效应,动态响应速度极快,惯量小,加速度可达20G,速度达到10-30m/s,低速1μm/s时运动平滑,刚性高,结构紧凑,可选配直线编码器做高精度位置控制,其位置精度取决于所选编码器。
第五章3-D静态磁场分析(标量法) 5.1 在3-D静态磁场分析(标量法)中要用到的单元 表1三维实体单元: 单元维数形状或特性自由度 SOLID5 3-D 六面体,8个节点每节点6个:位移、电势、磁标量位或温度SOLID96 3-D 六面体,8个节点磁标量位 SOLID98 3-D 四面体,10个节点位移、电势、磁标量位、温度 表2三维界面单元 单元维数形状或特性自由度 INTER115 3-D 四边形,4个节点磁标量位,磁矢量位 表3三维连接单元 单元维数形状或特性自由度3D杆状( Bar)、弧状(Arc)、线圈 SOURC36 3个节点无 (Coil)基元 表4三维远场单元 单元维数形状或特性自由度 四边形,4个节点; INFIN47 3-D 磁标量位、温度 或三边形,3个节点 INFIN111 3-D 六面体,8个或20个节点磁矢量位、磁标量位、电势、温度SOLID96和SOLID97是磁场分析专用单元,SOLID62、SOLID5和SOLID98更适合于耦合场求解。 5.2 磁标量位(MSP)法介绍 在磁标量位方法中,可使用三种不同的分析方法:简化标势法(RSP)、差分标势法(DSP)和通用标势(GSP)法。 ·若模型中不包含铁区,或有铁区但无电流源时,用RSP法。若模型中既有铁区又有电流源时,就不能用这种方法。 ·若不适用RSP法,就选择DSP法或GSP法。DSP法适用于单连通铁区,GSP法适用于多连通铁区。 5.2.1单连通区与多连通区
单连通铁区是指不能为电流源所产生的磁通量提供闭合回路的铁区,而多连通铁区则可以构成闭合回路。参见图1(a)、(b)“连通域”。 数学上,通过安培定律来判断单连通区或是多连通区,即磁场强度沿闭合回路的积分等于包围的电流(或是电动势降MMF)。 因为铁的磁导率非常大,所以在单连通区域中的MMF降接近于零,几乎全部的MMF降都发生在空气隙中。但在多连通区域中,无论铁的磁导率如何,所有的MMF降都发生在铁芯中。 5.3 3-D静态磁标势分析的步骤 该分析类型与2-D静态分析的步骤基本一样: 1.建立物理环境 2.建模、给模型区域赋属性和分网格 3.加边界条件和载荷(激励) 4.用RSP、DSP或GSP方法求解 5.观察结果 5.3.1创建物理环境 首先设置分析参数为“Magnetic-Nodal”,并给出分析题目。然后用ANSYS前处理器定义物理环境包含的项目。即单元类型、KEYOPT选项、材料特性等。3D分析的大部分过程与2D 分析一致,本章下面部分介绍3D分析中要特殊注意的事项。 · SOLID96单元可为模型所有的内部区域建模,包括:饱和区、永磁区和空气区(自由空间)。对于电流传导区,需用SOURC36单元来表示,关于电流传导区建模,后面有详细讲述。 ·对于空气单元的外层区域,推荐使用INFIN47单元(4节点边界单元)或INFIN111单元(8节点或20节点边界单元)。INFIN47单元和INFIN111单元可很好地描述磁场的远场衰减,
直线电机工作原理及其驱动技术的应用 摘要:简述了直线电机工作原理及其驱动技术,并且举例说明了直线电机直接驱动与传统数控机床“旋转伺服电机+滚珠丝杠”的传动方式对比具有的巨大优势。介绍了直线电机进给驱动技术在数控机床上的几个应用实例,指出直线电机进给驱动技术将是高速数控机床未来发展的方向。 引言 随着航空航天、汽车制造、模具加工、电子制造行业等领域对高效率地进行加工的要求越来越高,需要大量高速数控机床。机床进给系统是高速机床的主要功能部件。而直线电机进给系统彻底改变了传统的滚珠丝杠传动方式存在的弹性变形大、响应速度慢、存在反向间隙、易磨损等先天性的缺点,并具有速度高、加速度大、定位精度高、行程长度不受限制等优点,令其在数控机床高速进给系统领域逐渐发展为主导方向。 1 直线电机及其驱动技术 现代先进的驱动技术主要分为两大类:一类为电磁式的,另一类则为非电磁式的。 电磁类的现代先进的驱动技术主要由现代电磁类驱动器与现代控制系统组成,它的驱动器包括传统改进型的电磁驱动器与新发展型的电磁驱动器。它们中有旋转的、直线的、磁浮的、电磁发射的等等。除了在一般通用电机技术基础上改进获得的电机技术外,还有更多的是在通用电机技术基础上进一步发展的新型电机技术,如直线电机技术、无刷直流电机技术、开关磁阻电机技术和各种新型永磁电机技术等。 直线电机是一种将电能直接转换成直线运动机械能而不需通过中问任何转换装置的新颖电机,它具有系统结构简单、磨损少、噪声低、组合性强、维护方便等优点。旋转电机所具有的品种,直线电机几乎都有相对应的品种,其应用范围正在不断扩大,并在一些它所能独特发挥作用的地方取得了令人满意的效果。 直线电机结构示意图如下图所示。直线电机是将传统圆筒型电机的初级展开拉直,变初级的封闭磁场为开放磁场,而旋转电机的定子部分变为直线电机的初级,旋转电机的转子部分变为直线电机的次级。在电机的三相绕组中通入三相对称正弦电流后,在初级和次级间产生气隙磁场,气隙磁场的分布情况与旋转电机相似,沿展开的直线方向呈正弦分布。当三相电流随时问变化时,使气隙磁场按定向相序沿直线移动,这个气隙磁场称为行波磁场。当次级的感应电流和气隙磁场相互作用便产生了电磁推力,如果初级是固定不动的,次级就能沿着行波磁场运动的方向做直线运动。即可实现高速机床的直线电机直接驱动的进给方式,把直线电机的初级和次级分别直接安装在高速机床的工作台与床身上。由于这种进给传动方式的传动链缩短为0,被称为机床进给系统的“零传动”。 与“旋转伺服电机+滚珠丝杠”传动方式相比较,直线电机直接驱动有以下优点:(1)高速度,目前最大进给速度可达100~200m/min。(2)高加速度,可高达2g~10g。(3)定位精度高,由于只能采用闭环控制,其理论定位精度可以为0,但由于存在检测元件安装、测量误差,实际定位精度不可能为0。最高定位精度可达0.1~0.01m。(4)