
LCD画线方法及C语言实现
数学上的直线是没有宽度、由无数个点构成的集合,显然,光栅显示器只能近地似显示直线。当我们对直线进行光栅化时,需要在显示器有限个象素中,确定最佳逼近该直线的一组象素,并且按扫描线顺序,对这些象素进行写操作,这个过程称为用显示器绘制直线或直线的扫描转换。
由于在一个图形中,可能包含成千上万条直线,所以要求绘制算法应尽可能地快。本节我们介绍一个象素宽直线绘制的三个常用算法:
数值微分法(DDA)、中点画线法和Bresenham算法。
(1)数值微分(DDA)法
设过端点P0(x0 ,y0)、P1(x1 ,y1)的直线段为L(P0 ,P1),则直线段L的斜率为k=(y1-y0)/(x1-x0)。要在显示器显示L,必须确定最佳逼近L的像素集合。我们从L的起点P0的横坐标x0向L的终点P1的横坐标x1步进,取步长=1(个象素),用L的直线方程y=kx+b 计算相应的y坐标,并取象素点(x,round(y))作为当前点的坐标。
因为:yi+1 = kxi+1+b = kxi+b+kDx = yi+kDx
所以,当Dx =1; yi+kDx = yi+k。
也就是说,当x每递增1,y递增k(即直线斜率)。
根据这个原理,我们可以写出DDA画线算法程序。DDA画线算法程序:
void DDALine(int x0,int y0,int x1,int y1,int color)
{
int x;
float dx, dy, y, k;
dx = x1-x0;
dy=y1-y0;
k=dy/dx,;
y=y0;
for (x=x0;x< x1;x++)
{
drawpixel (x, int(y+0.5), color);
y=y+k;
}
}
注意:我们这里用整型变量color表示象素的颜色和灰度。
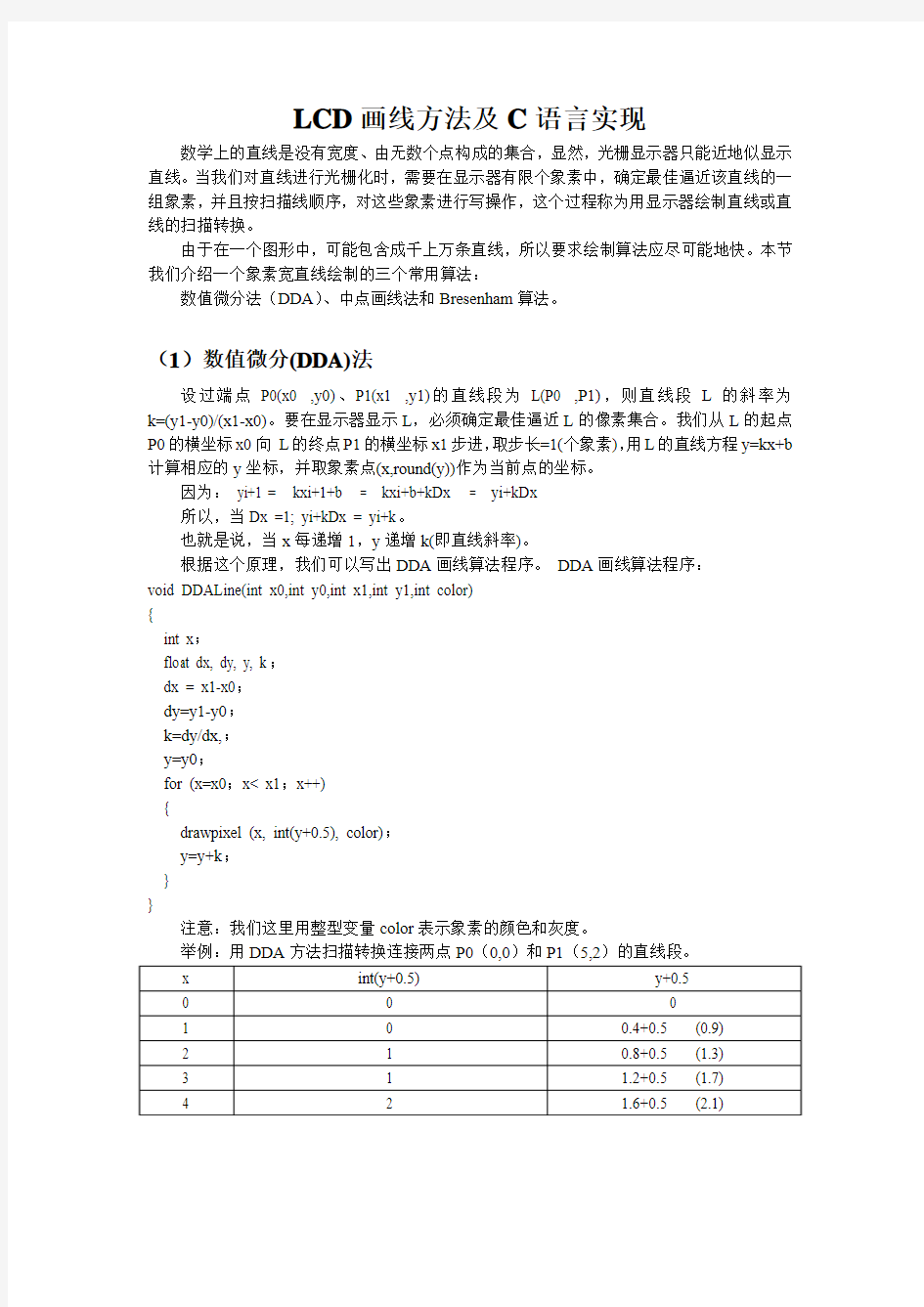
举例:用DDA方法扫描转换连接两点P0(0,0)和P1(5,2)的直线段。
图2.1.1直线段的扫描转换
注意:上述分析的算法仅适用于|k| ≤1的情形。在这种情况下,x每增加1,y最多增加1。当|k| > 1时,必须把x,y地位互换,y每增加1,x相应增加1/k。在这个算法中,y与k 必须用浮点数表示,而且每一步都要对y进行四舍五入后取整,这使得它不利于硬件实现。
(2)中点画线法
假定直线斜率k在0~1之间,当前象素点为(xp,yp),则下一个象素点有两种可选择点P1(xp+1,yp)或P2(xp+1,yp+1)。若P1与P2的中点(xp+1,yp+0.5)称为M,Q为理想直线与x=xp+1垂线的交点。当M在Q的下方时,则取P2 应为下一个象素点;当M在Q 的上方时,则取P1为下一个象素点。这就是中点画线法的基本原理。
图2.1.2 中点画线法每步迭代涉及的象素和中点示意图
下面讨论中点画线法的实现。过点(x0,y0)、(x1, y1)的直线段L的方程式为F(x, y)=ax+by+c=0,其中,a=y0-y1, b=x1-x0, c=x0y1-x1y0,欲判断中点M在Q点的上方还是下方,只要把M代入F(x,y),并判断它的符号即可。
为此,我们构造判别式: d=F(M)=F(xp+1, yp+0.5)=a(xp+1)+b(yp+0.5)+c
所以:
当d<0时,M在L(Q点)下方,取P2为下一个象素;
当d>0时,M在L(Q点)上方,取P1为下一个象素;
当d=0时,选P1或P2均可,约定取P1为下一个象素;
注意到d是xp, yp的线性函数,可采用增量计算,提高运算效率:
若当前象素处于d>=0情况,则取正右方象素P1(xp+1, yp),要判下一个象素位置,应计算d1=F(xp+2, yp+0.5)=a(xp+2)+b(yp+0.5)=d+a,增量为a。
若d<0时,则取右上方象素P2(xp+1, yp+1)。要判断再下一象素,则要计算d2= F(xp+2, yp+1.5)=a(xp+2)+b(yp+1.5)+c=d+a+b ,增量为a+b。画线从(x0, y0)开始,d的初值d0=F(x0+1, y0+0.5)=F(x0, y0)+a+0.5b,因F(x0, y0)=0,所以d0=a+0.5b。
由于我们使用的只是d的符号,而且d的增量都是整数,只是初始值包含小数。因此,我们可以用2d代替d来摆脱小数,写出仅包含整数运算的算法程序。中点画线算法程序:
void Midpoint Line (int x0,int y0,int x1, int y1,int color)
{
int a, b, d1, d2, d, x, y;
a=y0-y1;
b=x1-x0;
d=2*a+b;
d1=2*a;d2=2* (a+b);
x=x0;y=y0;
drawpixel(x, y, color);
while (x { if (d<0) { x++; y++; d+=d2; } else {x++;d+=d1;} drawpixel (x, y, color); } /* while */ } /* mid PointLine */ 举例:用中点画线方法扫描转换连接两点P0(0,0)和P1(5,2)的直线段。a=y0-y1=-2; b=x1-x0=5; d0=2*a+b=1; d1=2*a=-4; 图2.1.3 中点画线法 (3)Bresenham算法 Bresenham算法是计算机图形学领域使用最广泛的直线扫描转换算法。仍然假定直线斜率在0~1之间,该方法类似于中点法,由一个误差项符号决定下一个象素点。 算法原理如下:过各行各列象素中心构造一组虚拟网格线。按直线从起点到终点的顺序计算直线与各垂直网格线的交点,然后确定该列象素中与此交点最近的象素。该算法的巧妙之处在于采用增量计算,使得对于每一列,只要检查一个误差项的符号,就可以确定该列的所求象素。 图2.1.4 Bresenham算法 如图2.1.4所示,设直线方程为yi+1=yi+k(xi+1-xi)+k。假设列坐标象素已经确定为xi,其行坐标为yi。那么下一个象素的列坐标为xi+1,而行坐标要么为yi,要么递增1为yi +1。是否增1取决于误差项d的值。误差项d的初值d0=0,x坐标每增加1,d的值相应递增直线的斜率值k,即d=d+k。一旦d≥1,就把它减去1,这样保证d在0、1之间。当d≥0.5时,直线与垂线x=xi+1交点最接近于当前象素(xi,yi)的右上方象素(xi+1,yi +1);而当d<0.5时,更接近于右方象素(xi+1,yi)。为方便计算,令e=d-0.5,e的初值为-0.5,增量为k。当e≥0时,取当前象素(xi,yi)的右上方象素(xi+1,yi+1);而当e<0时,取(xi,yi)右方象素(xi+1,yi)。图2.1.4 Bresenham算法所用误差项的几何含义Bresenham 画线算法程序: void Bresenhamline (int x0,int y0,int x1, int y1,int color) { int x, y, dx, dy; float k, e; dx = x1-x0; dy = y1- y0; k=dy/dx; e=-0.5; x=x0,; y=y0; for (i=0;i drawpixel (x, y, color); x=x+1;e=e+k; if (e >= 0) { y++; e=e-1; } } } 举例:用Bresenham方法扫描转换连接两点P0(0,0)和P1(5,2)的直线段。 图2.1.5 Bresenham算法 上述Bresenham算法在计算直线斜率与误差项时用到小数与除法。可以改用整数以避免除法。由于算法中只用到误差项的符号,因此可作如下替换:2*e*dx。改进的Bresenham 画线算法程序: void InterBresenhamline (int x0,int y0,int x1, int y1,int color) { int x, y, dx, dy,e; dx = x1-x0,; dy = y1- y0,; e=-dx; x=x0; y=y0; for (i=0; i { drawpixel (x, y, color); x++; e=e+2*dy; if (e >= 0) y++; e=e-2*dx; } } } 基于模糊控制的速度控制 ——地面智能移动车辆速度控制系统问题描述 利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门(throttle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。 算法思想 模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 Figure 1模糊控制器的结构图 模糊控制的优点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。 模糊控制的缺点 成都工业学院·计算机工程学院 《程序设计基础》实验报告 1.实验目的 (1)熟练掌握while语句、do…while语句和for语句格式及使用方法,掌握三种循环控制语句的循环过程以及循环结构的嵌套,利用三 种循环语句实现循环结构; (2)掌握简单、常用的算法,并在编程过程中体验各种算法的编程技巧; (3)进一步学习调试程序,掌握语法错误和逻辑错误的检查方法。2.实验内容 (1)输出两个整数m和n,求它们的最大公约数和最小公倍数。 要求: ①画出算法流程图,从键盘输入m和n; ②对负数和零可不做考虑; ③运行程序,对m>n、m ③按照数字、大写字母、小写字母及其他字符数的顺序输出结果 3.流程图 4.源程序 5. 运行结果 (1 ) 求最大公约数和最小公倍数 (2)求1000内最大的10个素数之和(3)计算π值 for循环结构程序设计教案 课程名称:C语言程序设计 本课内容:循环结构程序设计——for 语句 一、教学目标 1、领会程序设计中构成循环的方法 2 、掌握for 语句的用法 二、教学重点 1、for 语句的一般格式 2、for语句的执行过程 三、教学难点 for 语句的综合利用 四、教学方法 1、课堂讲授,给出主要内容。 2、讲解其基本格式。 3、应用示例,结合相应的知识讲解。 4、执行过程用流程图和例题用(演示法和讲解法)进行详细说明。 五、教学过程 (一)导入 1、复习前两节课我们学习的两种循环语句——while语句和do~while 语句的基本格式和执行过程和特征。 2、给出例子如下: main( ) {int x=1; (表达式1) s=0; while(x<=100) (表达式2) {s=s+x; x=x+1; (表达式3) } printf(“%d”,s); } 分析用while语句来完成的程序,主要完成1到100的累加和,对一个循环程序来说最关键的三个部分:循环变量的赋初值、控制循环条件、循环控制变量的更新。 (二)教学过程 1、写出本节课要介绍的for语句的一般格式 for(表达式1;表达式2;表达式3) 循环体; 2、掌握:基本格式和各个表达式的功能和特征 强调:for语句中的所有表达式和while语句中的表达式所完成的功能是相同的。 表达式1:循环变量的初始化(初始值) 表达式2:循环条件(终止值) 表达式3:循环变量自增 3、for语句的执行过程 for ( int i = 0 ; i < 10 ; i++) { printf("我最棒"); } PWM调速的C语言程序编写 关于PWM的原理在上一篇文章中已经说的很详细了,现在就细说一下pwm C语言程序的编写。 C语言中PWM的编写有这么几种方法;一、用普通的I/O口输出的PWM ,二、使用定时计数器编写,三、就是使用片内PWM了。 1 先说使用普通的I\O口编写PWM程序了。 使用I/O口输出PWM波形你必须首先明白PWM他的实质是:调制占空比,占空比就是波形中高电平的长度与整个波长的比值。我们写C语言的目的是写PWM波形的一个周期。在这个周期内高低电平的比值是可以改变的。这也就符合了PWM的原意脉宽调制。即高电平的宽度的调制。当然了PWM他也可用于改变频率,我们这里只先说他改变脉宽。 一旦我们的C语言程序写完那么他产生的PWM波形的频率就一定了。(也可写频率变化的PWM,难度有点大)一般我们控制使用1K到10K的PWM波进行控制。当然了你也可在要求不是很高的地方使用频率更低的PWM波。比如在飞思卡尔智能车比赛中我们学校使用的PWM波频率只有600HZ. 我们要改变一个PWM波周期内的高电平的宽度显然需要将一个PWM波的周期分成单片机可以控制的N个小的周期,N的 取值越大你的调速等级越高,但产生的PWM频率就越低。我们下面以实现100级调速为例编写PWM程序。 先写出程序再慢慢给大家分析 void pwm (uchar x,uint y) //X 为占空比 Y为函数使用时间 { uint i,j,a,b; for(i=y;i>0;i--) //定时外函数 { for(j=7;j>0;j--) //定时内函数 { for(a=y;a>0;a--) //PWM波高电平宽度 { PORTA=0X01; } 一、循环控制 (一)、break语句 break语句通常用在循环语句和开关语句中。当break用于开关语句switch中时,可使程序跳出switch而执行switch以后的语句;如果没有break语句,则将成为一个死循环而无法退出。break在switch中的用法已在前面介绍开关语句时的例子中碰到,这里不再举例。 当break语句用于do-while、for、while循环语句中时,可使程序终止循环而执行循环后面的语句,通常break语句总是与if语句联在一起。即满足条件时便跳出循环。 例如: int main(int argc, char *argv[]) { int sn=0,i; for(i=1;i<=100;i++) { if(i==51) break; /*如果i等于51,则跳出循环*/ sn+=i; /*1+2+……+50*/ } printf(%d\n,sn); } 可以看出,最终的结果是1+2+……+50。因为在i等于51的时候,就跳出循环了。自己写写怎样在while和do--while循环中增加break语句。 注意: 1. break语句对if-else的条件语句不起作用。 2. 在多层循环中,一个break语句只向外跳一层。 例如: int main(int argc, char *argv[]) { int i,j; printf(i j\n); for(i=0;i<2;i++) for(j=0;j<3;j++) { if(j==2) break; printf(%d %d\n,i,j); } } 输出结果为: i j 0 0 0 1 1 0 1 1 当i==0,j==2时,执行break语句,跳出到外层的循环,i变为1。 (二)、continue语句 循环数组练习题 一.选择题 1.for(i=0;i<10;i++);结束后,i的值是;B A 9 B 10 C 11 D 12 2.下面程序的循环次数是:D int k=0; while(k<10) {if(k<1) continue; if(k==5) break; k++; } A. 5 B 6 C 4 D 死循环,不能确定循环次数3.下面程序的输出结果是() main() { int s,k; for(s=1,k=2;k<5;k++) s+=k; printf(“%d\n”,s); } A 1 B 9 C 10 D 15 4.要使下面程序输出10个整数,则在下画线处填入正确的数是:for(i=0;i<= ;) printf(“%d\n”,i+=2); A 9 B 10 C 18 D 20 5.运行下面程序: main() { int i=10,j=0; do { j=j+i; i--; }while(i>5); printf(“%d\n”,j); } 输出结果是: A 45 B 40 C 34 D 55 6.运行下面程序 #include “stdio.h” main() { int k=0,a=1; while(k<10) { for( ; ;) { if((k%10)==0) break; else k--; } k+=11; a+=k; } printf(“%d %d\n”,k,a); } 则输出的结果是() A 21 32 B 21 33 C 11 12 D 10 11 7.以下叙述正确的是: A.do---while语句构成的循环不能用其他语句构成的循环来代替。 B.do---while语句构成的循环只能用break语句退出。 C.用do---while语句构成的循环,在while 后的表达式为非零时结束循环。 D.用do---while语句构成的循环,在while后的表达式为零时结束循环。 8.有如下程序: main() { int x=3; do{ printf(“%d”,x--); 五种编程方式实现流水灯的单片机C程序 //功能:采用顺序结构实现的流水灯控制程序 /*此方式中采用的是字操作(也称为总线操作)*/ #include 电动车控制器C语言源代码 . #define _E_BIKE_W79E83X_C_ #include "intrins.h" #include "E_BIKE_W79E83X.H" #include"W79E834.h" /******************************************************************** ********* * 主函数 ******************************************************************** * *********/ void main(void) { Init(); // 初始化 Init_IO(); // 初始化端口 H_Sample(); // 霍尔信号采样 Phase_Change(); // 相位变换 AutoHelpEN(1,0x1AA,200); /* 第一个参数设定助力功能允许不否,1为允许,0为禁止 第二个参数设定助力力量(PWM占空比),数值围:0~0x355,数值越大,力量 越大 第三个参数设定助力时间,数值越大,时间越长 */ Keep_SpeedEN(1,0x20,6); /* 第一个参数设定定速巡航功能允许不否,1为允许,0为禁止第二个参数设定定速巡航最低速设置 . . 第三个参数设定在巡航点保持多长时间后才进入巡航 */ Current_Lim(0xB48); /* 过流保护上限值设定 0xB00对应限电流最大大约为2.6A 0xB80对应限流值最大大约为3.8A */ LowVoltage_Lim(0x9B0); /* 欠压保护下限值设定 电池电压为47.9V时ADC采样值为0xB6 ==> 0xB60 推算电池电压为41V时的采样值为0x9B ==> 0x9B0 推算电池电压为40V时的采样值为0x98 ==> 0x980 */ EABS_Set(1,1); /* 第一个参数为滑行充电功能使能,1为允许,0为禁止 总结归纳了C语言的32个关键字 第一个关键字:auto 用来声明自动变量。可以显式的声明变量为自动变量。只要不是声明在所有函数之前的变量,即使没加auto关键字,也默认为自动变量。并且只在声明它的函数内有效。而且当使用完毕后,它的值会自动还原为最初所赋的值。自动变量使用时要先赋值,因为其中包含的是未知的值。 例:auto int name=1; 第二个关键字:static 用来声明静态变量。可以显式的声明变量为静态变量。也为局部变量。只在声明它的函数内有效。它的生命周期从程序开始起一直到程序结束。而且即使使用完毕后,它的值仍旧不还原。即使没有给静态变量赋值,它也会自动初始化为0. 例:static int name=1. 第三个关键字:extern 用来声明全局变量。同时声明在main函数之前的变量也叫全局变量。它可以在程序的任何地方使用。程序运行期间它是一直存在的。全局变量也会初始化为0. 例:extern int name; 第四个关键字:register 用来声明为寄存器变量。也为局部变量,只在声明它的函数内有效。它是保存在寄存器之中的。速度要快很多。对于需要频繁使用的变量使用它来声明会提高程序运行速度。 例:register int name=1; 第五个关键字:int 用来声明变量的类型。int为整型。注意在16位和32位系统中它的范围是不同的。16位中占用2个字节。32位中占用4个字节。还可以显式的声明为无符号或有符号: unsigned int或signed int .有符号和无符号的区别就是把符号位也当作数字位来存储。也可用short和long来声明为短整型,或长整行。 例:int num; 第六个关键字:float 用来声明变量的类型。float为浮点型,也叫实型。它的范围固定为4个字节。其中6位为小数位。其他为整数位。 例:float name; 音量控制M62446的驱动C程序 音量控制M62446 m62446 pdf //------------------------------------------------------------------------- // M62446 drving routines, VER 1.0 // // COPYRIGHT (C) 2000, Enbia Technology Inc. // Target: 8031 // AUTHOR: STEVEN LUO // // Revision History: // 2001/1/5 - Original Version // //------------------------------------------------------------------------- #include 《C语言循环程序设计—for语句》教学案例漠河县职业技术学校尘威威 《C语言循环程序设计—for语句》教学案例 漠河县职业技术学校尘威威 C语言基础是中职计算机专业的一门必修课,也是要求计算机专业学生学习、掌握的一门重点课程,这门课程核心内容就是要让学生掌握一门编程的语言,学会编写简单的程序,能读懂C语言源程序。 案例背景: 在计算机应用专业教学中,C语言是一门理论与实践结合得比较紧的课程。要掌握和使用好这门语言,既要求学生有比较扎实的理论基础,又要具备较强的应用实践能力。如果只是按照传统的知识体系照本宣科,让学生理解这些枯燥的概念都难,更不要说达到良好的教学效果,而且易挫伤学生学习编程的积极性。因此,在教学中可以改为从案例入手,通过给学生演示、让学生模仿,在实际应用中去探究和领悟这些概念,并适时地加以归纳总结和进行概念的延伸,让学生在轻松愉快的气氛中学习新知识。所以从课程内容而言,案例教学是适用的,是切合学生的。 循环结构是程序设计三种基本结构的重中之重,而循环中的for 循环是程序中运用最多的,也是较灵活的语句之一,它既是前面知识的延续,又是后面知识的基础,在知识构架中起着重要的衔接作用,如果不采用一些恰当有效的方法,学生在学习过程中会难以掌握。在教学过程中教师应结合一些有趣的程序,提高学生的学习兴趣,引导 学生全身心地投入课堂。本文针对学生的实际情况,具体阐述for循环语句在具体编程时的灵活应用。 教学目标确定 (一)知识与技能 1、领会程序设计中构成循环的方法 2、能使用for循环语句编写C语言语句,并能运用for循环语句编写出正确的程序。 (二)过程与方法 C语言程序设计中for循环语句教学以行动导向教学为主线,通过“提出问题―分析问题―解决问题―问题扩展―讨论―总结归纳―实践”的程序,过渡到知识应用和练习。 本课采用多媒体课件进行教学,通过课件把文字和图片有机的结合,使学生在学习过程中更加容易理解,学习效率高。在课堂讨论和实践过程中,教师适当引导,学生主动探究、归纳总结学习内容,既有利于领会掌握新知识点,又能充分发挥学生的主体作用。在重点的突破上,采用范例比较教学法,给出具体的案例,让学生通过典型的例子掌握知识,同时通过用while、do while语句的所编写的程序进行比较,加深学生印象,让学生快速的掌握for循环语句的基本结构及使用方法。 (三)情感与价值观 1.让学生在自主解决问题的过程中培养成就感,为今后自主学习打下良好的基础。 P I D控制算法的C语言 实现完整版 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256) P I D控制算法的C语言实现一P I D算法原理最近两天在考虑一般控制算法的C语言实现问题,发现网络上尚没有一套完整的比较体系的讲解。于是总结了几天,整理一套思路分享给大家。 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!简单的不是原始的,简单的也不是落后的,简单到了美的程度。先看看PID算法的一般形式: PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t 时刻): 1.输入量为rin(t); 2.输出量为rout(t); 3.偏差量为err(t)=rin(t)-rout(t); pid的控制规律为 理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境具体一下: 1.规定这个流程是用来为直流电机调速的; 2.输入量rin(t)为电机转速预定值; 3.输出量rout(t)为电机转速实际值; 4.执行器为直流电机; 5.传感器为光电码盘,假设码盘为10线; 6.直流电机采用PWM调速转速用单位转/min表示; 不难看出以下结论: 1.输入量rin(t)为电机转速预定值(转/min); 2. 输出量rout(t)为电机转速实际值(转/min); 3.偏差量为预定值和实际值之差(转/min); 那么以下几个问题需要弄清楚: 1.通过PID环节之后的U(t)是什么值呢 2.控制执行器(直流电机)转动转速应该为电压值(也就是PWM占空比)。 第5章循环结构程序设计 练习题 1. 单项选择题 (1)语句while (!e);中的条件!e等价于 A 。 A. e==0 B. e!=1 C. e!=0 D. ~e (2)下面有关for循环的正确描述是 D 。 A. for循环只能用于循环次数已经确定的情况 B. for循环是先执行循环体语句,后判定表达式 C. 在for循环中,不能用break语句跳出循环体 D. for循环体语句中,可以包含多条语句,但要用花括号括起来 (3)C语言中 D 。 A. 不能使用do-while语句构成的循环 B. do-while语句构成的循环必须用break语句才能退出 C. do-while语句构成的循环,当while语句中的表达式值为非零时结束循环 D. do-while语句构成的循环,当while语句中的表达式值为零时结束循环 (4)C语言中while和do-while循环的主要区别是 A 。 A. do-while的循环体至少无条件执行一次 B. while的循环控制条件比do-while的循环控制条件严格 C. do-while允许从外部转到循环体内 D. do-while的循环体不能是复合语句 (5)以下程序段 C 。 int x=-1; do { x=x*x; } while (!x); A. 是死循环 B. 循环执行二次 C. 循环执行一次 D. 有语法错误 (6)下列语句段中不是死循环的是__C__。 第5章循环结构程序设计35 A. i=100; while (1) { i=i%100+1; if (i==20) break; } B.for (i=1;;i++) sum=sum+1; C.k=0; do { ++k; } while (k<=0); D.s=3379; while (s++%2+3%2) s++; (7)与以下程序段等价的是__A__。 while (a) { if (b) continue; c; } A. while (a) B. while (c) { if (!b) c; } { if (!b) break; c; } C. while (c) D. while (a) { if (b) c; } { if (b) break; c; } (8)以下程序的输出结果是_B___。 #include 循环控制结构(又称重复结构)是程序中的另一个基本结构.在实际问题中,常常需要 进行大量的重复处理,循环结构可以使我们只写很少的语句,而让计算机反复执行,从而完成大量类同的计算. C语言提供了while语句、do...while语句和for语句实现循环结构. 3.4.1while语句 while语句是当型循环控制语句,一般形式为: while<表达式>语句; 语句部分称为循环体,当需要执行多条语句时,应使用复合语句. while语句的流程图见图3-8,其特点是先判断,后执行,若条件不成立,有可能一次也不执行. [例3-11]求n! 分析:n!=n*(n-1)*(n-2)*..2*1,0!=1.即S0=1,Sn=Sn-1*n.可以从S0开始,依次求出S1、S2、...Sn. 统一令S等于阶乘值,S的初值为0!=1;变量i为计数器,i从1变到n,每一步令S=S*i,则最终S中的值就是n!. 流程图见图3-9,程序如下: 考察图3-9中循环部分的流程图可以看出,在循环前各变量应有合适的值(s=1),另外,控制循环结束的变量(此处为i)必须在循环体中被改变,否则,循环将无限进行下去,成为死循环. 本题中,将多项式的每一项用t表示,s代表符号,在每一次循环中,只要改变s、n的值, 就可求出每一项t. 一般情况下,while型循环最适合于这种情况:知道控制循环的条件为某个逻辑表达式的值,而且该表达式的值会在循环中被改变,如同例3-12的情况一样. 3.4.2do...while语句 在C语句中,直到型循环的语句是do...while,它的一般形式为: do语句while<表达式> 其中语句通常为复合语句,称为循环体. do...while语句的流程图见图3-10,其基本特点是:先执行后判断,因此,循环体至少被执行一次. 但需要注意的是,do...while与标准的直到型循环有一个极为重要的区别,直到型循环是当条件为真时结束循环,而do...while语句恰恰相反,当条件为真时循环,一旦条件为假,立即结束循环,请注意do...while语句的这一特点. 例[3-13]计算sin(x)=x-x3/3!+x5/5!-x7/7!+... 直到最后一项的绝对值小于1e-7时为止. 分析:这道题使用递推方法来做. 让多项式的每一项与一个变量n对应,n的值依次为1,3,5,7,...,从多项式的前一项算后一项,只需将前一项乘一个因子: (-x2)/((n-1)*n) 用s表示多项式的值,用t表示每一项的值,程序如下: #include 用单片机控制直流电动机的正反转、加减速的程序如何用C语言写 参考一下这个例子吧。 #include 精心整理 第5章循环结构程序设计 5.1基本知识点 ?while语句的使用格式和注意事项 ?do-while语句的使用格式和注意事项 ?for语句的使用格式和注意事项 ?break和continue语句在循环语句中的应用 ? ? ? ? 1. C. A.do-while的循环体至少无条件执行一次 B.while的循环控制条件比do-while的循环控制条件严格 C.do-while允许从外部转到循环体内 D.do-while的循环体不能是复合语句 (5)以下程序段C。 intx=-1; do { x=x*x; } while(!x); A.是死循环 B.循环执行二次 C.循环执行一次 D.有语法错误 (6)下列语句段中不是死循环的是__C__。 A.i=100; while(1) { i=i%100+1; if(i==20)break; } B.for(i=1;;i++) sum=sum+1; C. C. COUT< num++; cout< for循环使用详解(c语言版) 说明:c语言的很多语法部分都和JAVA,AS等相同特别是for的用法. c语言中的for循环语句使用最为灵活,不仅可以用于循环次数已经确定的情况,而且可以用于循环次数不确定而只给出循环结束条件的情况,它完全可以代替while语句. for(表达式 1;表达式 2;表达式 3)语句 它的执行过程如下: (1)先求表达式 1. (2)求表达式2,若其值为真(值为非0),则执行for语句中指定的内嵌语句,然后执行下面第三步做若为 假(值为0),则结束循环,转到第5步. (3)求解表达式3 (4)转回上面第(2)步骤继续执行; (5)结束循环,执行for语句下面的一个语句; for(循环变量赋初值;循环条件;循环变量增值)语句 如 for(i=1;i =100;i++)sum=sum+i; 它的执行相当于 i=1; while(i =100){ sum=sum+i; i++; } 显然,用for语句更简单、方便。 说明: (1)for语句的一般形式中的”表达式1”可以省略,此时应在for语句之前给循环变量赋初值.注意省略表达式1时,其后的分号不能省略.如for(;i =100;i++){....}; (2)如果表达式2省略即不判断循环条件,循环无终止地循环下去,也就是认为表达式2始终为真. 例如:for(i=1;;i++){.....}; 相当于 i=1; while(1) {sum=sum+1; i++; } (3)表达式3也可以省略,但此时程序设计者应另外设法保证循环能正常结束.如: for(i=1;i =100;) {sum=sum+1; i++; PID控制算法的C语言实现一PID算法原理 最近两天在考虑一般控制算法的C语言实现问题,发现网络上尚没有一套完整的比较体系的讲解。于是总结了几天,整理一套思路分享给大家。 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!简单的不是原始的,简单的也不是落后的,简单到了美的程度。先看看PID算法的一般形式: PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t时刻): 1.输入量为rin(t); 2.输出量为rout(t); 3.偏差量为err(t)=rin(t)-rout(t); pid的控制规律为 理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境具体一下: 1.规定这个流程是用来为直流电机调速的; 2.输入量rin(t)为电机转速预定值; 3.输出量rout(t)为电机转速实际值; 4.执行器为直流电机; 5.传感器为光电码盘,假设码盘为10线; 6.直流电机采用PWM调速转速用单位转/min表示; 不难看出以下结论: 1.输入量rin(t)为电机转速预定值(转/min); 2. 输出量rout(t)为电机转速实际值(转/min); 3.偏差量为预定值和实际值之差(转/min); 那么以下几个问题需要弄清楚: 1.通过PID环节之后的U(t)是什么值呢 2.控制执行器(直流电机)转动转速应该为电压值(也就是PWM占空比)。 3.那么U(t)与PWM之间存在怎样的联系呢 水仙花 #include 的排列后再去掉不满足条件的排列。 2.程序源代码: #include "stdio.h" #include "conio.h" main() { int i,j,k; printf("\n"); for(i=1;i<5;i++) /*以下为三重循环*/ for(j=1;j<5;j++) for (k=1;k<5;k++) { if (i!=k&&i!=j&&j!=k) /*确保i、j、k三位互不相同*/ printf("%d,%d,%d\n",i,j,k); } getch(); } 【程序2】 题目:企业发放的奖金根据利润提成。利润(I)低于或等于10万元时,奖金可提10%;利润高于10万元,低于20万元时,低于10万元的部分按1 0%提成,高于10万元的部分,可可提成7.5%;20万到40万之间时,高于20万元的部分,可提成5%;40万到60万之间时高于40万元的部分,可提成3%;60万到100万之间时,高于60万元的部分,可提成1.5%,高于100万元时,超过100万元的部分按1%提成,从键盘输入当月利润I,求应发放奖金总数? 1.程序分析:请利用数轴来分界,定位。注意定义时需把奖金定义成长整型。 2.程序源代码: C语言的32个关键字和9种控制语句 C语言的关键字共有32个,根据关键字的作用,可分其为数据类型关键字、控制语句关键字、存储类型关键字和其它关键字四类。 1 数据类型关键字(12个): (1) char :声明字符型变量或函数 (2) double :声明双精度变量或函数 (3) enum :声明枚举类型 (4) float:声明浮点型变量或函数 (5) int:声明整型变量或函数 (6) long :声明长整型变量或函数 (7) short :声明短整型变量或函数 (8) signed:声明有符号类型变量或函数 (9) struct:声明结构体变量或函数 (10) union:声明共用体(联合)数据类型 (11) unsigned:声明无符号类型变量或函数 (12) void :声明函数无返回值或无参数,声明无类型指针(基本上就这三个作用) 2控制语句关键字(12个): A循环语句 (1) for:一种循环语句(可意会不可言传) (2) do :循环语句的循环体 (3) while :循环语句的循环条件 (4) break:跳出当前循环 (5) continue:结束当前循环,开始下一轮循环 B条件语句 (1)if: 条件语句 (2)else :条件语句否定分支(与if 连用) (3)goto:无条件跳转语句 C开关语句 (1)switch :用于开关语句 (2)case:开关语句分支 (3)default:开关语句中的“其他”分支 D返回语句 return :子程序返回语句(可以带参数,也看不带参数) 3 存储类型关键字(4个) (1)auto :声明自动变量一般不使用 (2)extern:声明变量是在其他文件正声明(也可以看做是引用变量) 用C语言编写程序实现通过按键使LED灯周期闪烁(2010-02-24 21:12:44)标签: 循环闪烁周期led灯按键杂谈 一、设计题目 二、程序功能: 开机复位后,LED0到LED7全部点亮,所有LEDPort持续2S后熄灭,然后等待按键,按0键LED7以 0.8S周期闪烁,按1键LEDPort以1S周期闪烁。 三、总体设计思想 用中断方式实现定时器的定时,然后通过键盘中断程序实现通过对按键的操作来实现相应的周期闪烁。 在我编写的实验程序中我用到了定时器中断和外部中断。程序共分为两个模块,一个为定时器模块,一个为键盘中断程序模块,在主函数中,首先实现所有LEDPort点亮,然后通过中断方式实现定时2S,在定时器num==20时,设定全局变量为标志位flag=1,然后再主函数中设定条件,通过标志位的变化实现所有LEDPort持续2S后熄灭。然后进入循环,等待按键,在按键中断服务程序中使用switch语句实现通过改变num1的值来实现LED7的闪烁周期。设定标志位b=0,在主函数中使用if语句通过判断b的值来改变LED7的亮灭情况,同时相应的b值会取反。 四、程序具体实现 实验要求开机复位后,LED0到LED7全部点亮2S后熄灭。在主函数中使用LEDPort=0x00;这条语句实现所有灯都亮,使用中断方式实现定时器定时2S,因为实验要求20ms溢出,所以设定num=100,在定时器中断服务程序中使用if语句判断条件,当num加到100,也就是说2S时间到时,执行flag=1;语句(先设定全局变量flag=0)。然后在主函数中使用while语句规定只有在flag=0时才执行所有LEDPort点亮的操作。2S时间到后,所有灯熄灭。然后进入while循环,基于模糊控制的速度跟踪控制问题(C语言以及MATLAB仿真实现)
大一上期C语言实验报告5 循环控制语句
C语言for循环语句教案
PWM调速的C语言程序编写
c语言循环语句和循环控制例题解析
C语言循环数组练习题
最新五种编程方式实现流水灯的单片机c程序讲课教案
电动车控制器C语言源代码
C语言 个关键字九种控制语句 种运算符
音量控制M62446的驱动C程序
C语言循环程序设计for语句教学案例
PID控制算法的C语言实现完整版精编版
C语言循环结构练习题带答案
c语言循环控制语句
C语言实现控制电机加减速正反转(飞思卡尔C代码)
C语言循环结构测习题带答案
for循环使用详解(c语言版)
PID控制算法的C语言实现
C语言程序设计50例(经典收藏)
C语言的32个关键字和9种控制语句
用C语言编写程序实现通过按键使LED灯周期闪烁
相关主题
文本预览