第五章电动轮椅运动控制系统的软件设计在本系统的控制方案中,作者采用 TMS320LF2407A DSP 控制芯片作为系统的核心控制芯片。它具有很快的运行速度,丰富的片内外设等系统资源和强大的中断功能以及灵活丰富的指令集、高速运算能力、内部操作的灵活性、低功耗等特点,使得在系统的软件设计中,可以实现复杂的控制算法。
系统软件设计的终极目的是:实现两个电机平滑稳定的协调运动控制,实现轮椅控制器的人机交互功能,具备完善的故障保护功能,且可以和 PC 机通讯的功能,使得轮椅能够在各种允许路况下都具有非常平稳舒适的运行性能。
5.1 系统的软件设计方案
5.1.1 系统的控制方块图
由第二章可知,本系统是采用电压负反馈、电流截止负反馈和电流正反馈补偿的控制算法实现两台直流电机的协调运动控制。调节器是数字 PI 调节器。系统的控制方块图如图 5-1 所示:
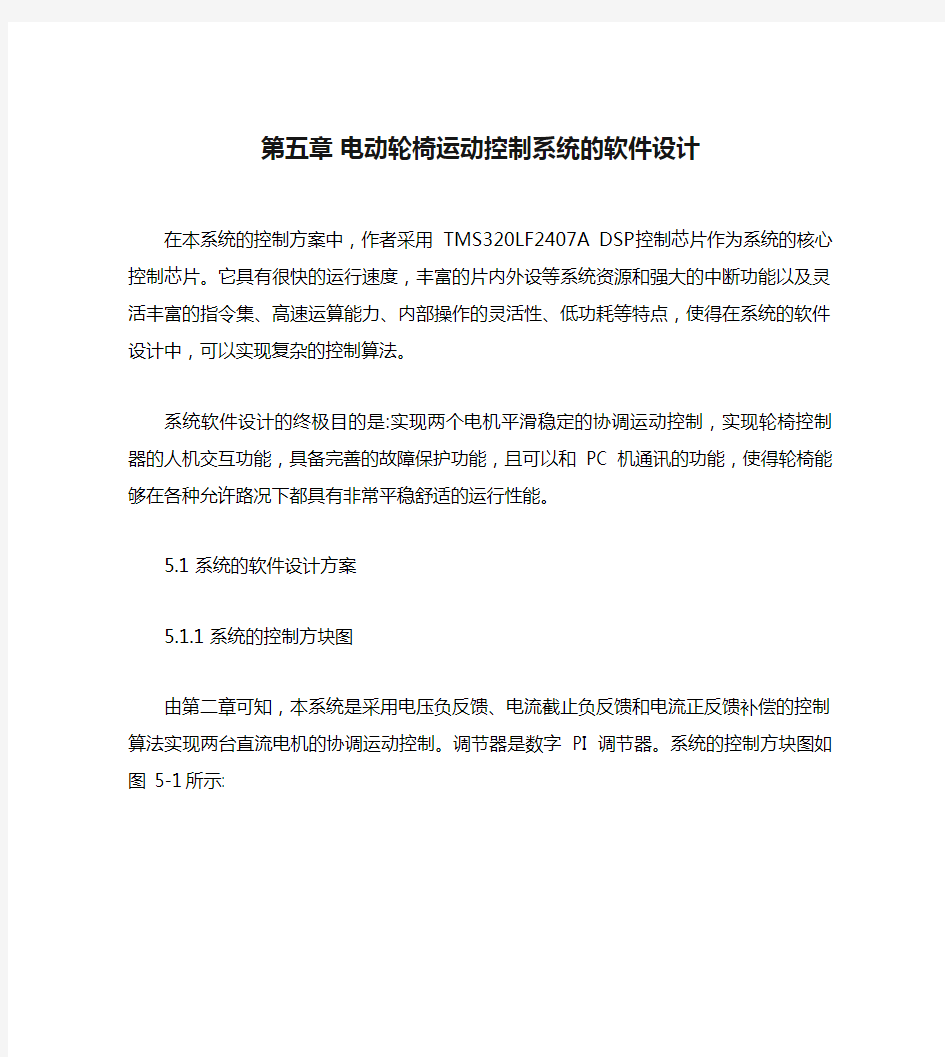
图5-1 轮椅运动控制系统控制方块图
由图 5-1 可知,操纵杆的输出信号 X、Y 经过 S 曲线和左/右电机给定发生器后合成为左/右电机的给定信号,取电机两端电压以及电流采样电阻电压作为反馈信号。为了防止轮椅起动或堵转时电机电流过大,本文采用了具有电流截止负反
馈的电压闭环调速系统。电流正反馈补偿环节是为了补偿由于电枢电阻引起的速降以提高系统的机械特性。当轮椅运行在比较糟糕的路况时,轮椅的左/右电机在相同的给定下,负载大小可能不同,这时当用户本想径直前进时,轮椅可能由于左/右电机负载的不同,而转弯,图 5-1中的“负载不平衡时电流正反馈补偿”环节就是为克服这种情况而设计的。S 曲线的设置使得轮椅在起/制动时都能够非常平滑和舒适,保证了安全性。速度给定发生器和负载补偿仲裁器是两台电机协调控制的核心指挥部,它们保证了轮椅在二维平面上的自由运行。
5.1.2 本系统软件控制的时序
对于一个以 TMS320LF2407A 为核心控制芯片的控制系统来说,首要的任务是确定系统的时钟系统,其次是合理决定软件中的中断数量和顺序。
本系统在硬件上采用的是外部晶体振荡器,其频率是 10MHz,在软件中设定CPU时钟为 40MHz,PWM 载波频率为 20KHz,系统的中断频率和 AD 采样频率也都是20KHz。
5.2 系统软件的主要功能模块
本轮椅运动控制系统软件主要包括以下一些功能模块:
(1)初始化模块;
(2)上电时操纵杆中心位置检测程序;
(3) AD 采样子程序;
(4)电池电量检测子程序;
(5)睡眠模式子程序;
(6)锁存模式子程序;
(7)鸣笛子程序;
(8)加速度曲线给定子程序;
(9)速度按键处理子程序;
(10)速度按键鸣笛子程序;
(11)防积分饱和 PI 调节器子程序;
(12)延时子程序;
(13)显示模块。
1)初始化模块
本系统初始化模块主要包括:DSP 芯片初始化、液晶显示器初始化、参数初始化。
其中 DSP 芯片初始化主要的任务是关中断、定义堆栈宏、配置数据存储空间、禁止看门狗、配置系统寄存器、配置 I/O 口、配置模数转换(AD)模块、配置事件管理器、串行通信接口(SCI)初始化、变量初始化、初始化成功鸣笛等。
液晶显示器初始化主要包括:定义液晶时序、指令集范围、擦除液晶显示屏,为显示数据做好准备。
参数初始化主要是为本系统软件所使用的一些重要参数,例如 PI 调节器参数,休眠时间,最大正反向、转向加速度等。
2)上电时操纵杆中心位置检测程序
当操纵杆不在中心位置时,为了防止用户突然上电开动轮椅造成安全隐患,在上电系统初始化后即对操纵杆是否在中心位置进行检测,若操纵杆在中心位置,则程序继续往下执行;否则每隔一秒鸣笛一次报警,以示操纵杆不在中心位置,如果十秒内用户释放操纵杆到中心位置则鸣笛结束,程序继续往下执行,否则程序便进入死循环,用户将无法开动轮椅,此时的唯一解决办法是:关了电源,把操纵杆放到中心位置,重新上电。
3)模数转换(AD)子程序
AD 采样子程序主要是对操纵杆输出、电机两端电压、电机电流、电池电压进行采样。TMS320F2407A DSP 的 AD 具有十位精度,系统在软件计算中一般将采样
值变换为 Q12 格式。对于轮椅运动控制系统,由于硬件中存在大量的感性元件,以及本文在硬件设计中并没有将功率驱动部分和控制部分进行信号隔离,所以电路中存在大量的干扰信号,尤其是与采样周期同频率的干扰信号。为此,对电机电流和电压采样值采用了递推平均滤波法[44]。递推平均滤波法是把 N 个测量数据看成一个队列,队列的长度为 N,每进行一次新的测量,就把测量结果放入队尾,而扔掉原来队首一个数据,这样在队列中始终有 N 个“最新”数据。计算滤波值时,只要对队列中的N 个数据进行平均,就可以得到新的滤波值。递
推平均滤波法对周期性干扰具有良好的抑止作用,而且还有平滑度高和灵敏度低的特点。在本轮椅运动控制系统中,N取 8。
4)电池电量检测子程序
电池电量检测子程序将 AD 采样得到的电池电压值换算成用户可以识读的十进制电压值并由液晶显示器显示。在电池电压不足时向用户鸣笛警示,同时液晶显示电池电压不足,给出充电提示。当电池电压低于某下限时,控制器会报警一段时间:如果轮椅此时正在运行,则控制器报警一分钟后封管抱闸,以给用户足够的时间停车;如果轮椅静止,则控制器报警五秒后封管抱闸。当轮椅在起/制动时,负载电流较大,此时 AD 采样所得到的电压值比正常时要小得多,显然不是真实的电池电压值,这就需要对采样值进行滤波处理。本文采用程序判断滤波法[44],根据经验判断确定两次采样允许的最大偏差 Y ,若先后两次的采样值的差值大于 Y ,则表明输入信号是干扰信号,应该去掉,而将上次采样值作为本次采样值;若小于 Y ,则本次采样值有效。在本文中取 Y 5 V。
5)睡眠模式子程序
当轮椅处在开机状态且三分钟内没有接收到用户对速度键和操纵杆的任何操作,则轮椅进入休眠模式。在进入休眠模式的最后十秒内,每隔一秒将鸣笛一次以向用户警示轮椅即将进入休眠模式,在此期间如果用户对速度键或操纵杆有任何
动作,轮椅将重新开始休眠时间倒计时,否则轮椅将进入休眠模式。要想控制器从休眠模式中退出,只有复位控制器或重新上电。
6)锁存模式子程序
在某些特殊场合为了防止对控制器的误动作或为了防止非用户本人使用轮椅,需要将轮椅置于锁存模式。要使得轮椅进入锁存模式,长按加速键听到一声长鸣后,轮椅即进入锁存模式;解锁时,长按减速键约五秒听到一声长鸣后,轮椅即退出锁存模式。需要注意的是:只有当操纵杆在中心位置时轮椅才可以被锁定。进入锁存模式后,轮椅封管、抱闸、关继电器。
7)鸣笛子程序
鸣笛子程序主要是供其它程序在需要给用户以蜂鸣器的方式警示时调用的子程序。控制鸣笛计时器可以控制蜂鸣器鸣笛时间的长短。
8)加速度曲线给定子程序
为了使得轮椅在起/制动时能够平滑稳定安全,本文设计了具有 S 曲线特性的加
速度给定子程序。
9)速度按键处理子程序
速度按键处理子程序是用来接收处理来自加减速键的信号,使得轮椅的最大速度能够按照加减速键的状态变化。轮椅的速度共分五个档位,每个档位对应着轮椅的一个最大速度。
10)速度按键鸣笛子程序
速度按键鸣笛子程序是用在当用户按下加减速键时蜂鸣器发出一声短鸣以示按键有效,值得注意的是当速度档是一挡或五档时蜂鸣器不叫。
11)PI 调节器子程序。
12)延时子程序
在本轮椅控制系统的软件设计中,所有的延时子程序,均采用 NOP 空指令的循环,而不是 RPT 指令,这是由于 RPT 指令不可以被中断打断[45],这会造成系统的误动作和一些别的软件故障。
13)显示模块
显示模块主要用于显示电池电压值、速度档值、轮椅的相关工作模式以及故障报警显示。
4.3 轮椅运动控制系统总的流程图
轮椅运动控制系统总的流程图如图 4-2 所示
4.4 系统软件的中断结构
本系统主要使用了外部中断 XINT1 和 T1 定时器周期中断。
其中外部中断 XINT1 主要完成的任务是:对功率管的故障检测与保护;T1 定时器周期中断则主要完成对两个电机的协调控制、AD 采样、过流保护、速度按键处理等。
(1)XINT1 中断程序流程图,如图 4-3 所示
(2)T1 定时器周期中断程序流程图,如图 4-4 所示
这里对程序流程图做几点说明。
1)程序中需要对操纵杆的位置和轮椅的运行状态进行判断,当操纵杆在中心位置且轮椅静止时(二者缺一不可),可以对轮椅进行封管、抱闸的操作。 2)电流控制。在本系统中,电流分别以三种方式参与了控制。第一,电流截止负反馈环节,起限流保护的作用。第二,电流正反馈补偿环节,起提高电机机械特性作用。第三,负载不平衡补偿,顾名思义,起协调两台电机平衡的作用。
脑控智能轮椅控制系统 摘要:为身体高度瘫痪的残疾人士能够自由移动,提出了一种基于脑机接口实验平台BCI2000的自发想象控制轮椅的新方法。该控制系统主要由Emotiv脑电采集装置、一台笔记本电脑、一个单片机控制器组成,对采集的信号进行时频特征分析,并利用改进的感知器算法对信号进行分类。利用提示被试者想象左右手运动的脑电信号特征,实现对轮椅的左转和右转的控制,对今后进一步研究轮椅的精确控制系统具有重要的指导意义。 关键词: Emotiv;BCI2000;脑控;智能轮椅 脑-机接口BCI(Brain-Computer Interface)是一种利用脑部神经发出的信息与计算机或其他外部设备通信的系统[1]。基于头皮的脑电信号可以反映大脑的不同状态,且记录简单、无创,能够实时地进行信号的提取和分类,在目前脑-机接口研究中是最多的[2]。 传统的轮椅人机交互由声音、摇杆和按键等实现。然而对于高位瘫痪不具备语言能力的人来说,通过BCI这种技术可以很好地帮助他们实现意念控制外部设备的愿望。目前随着BCI 技术的发展,实现大脑控制外部设备变得越来越有可能。在国外,Farwell等人就利用脑电信号中的P300开发了虚拟打字机,可以实现意念控制文字的输入[3]。同时,在现有脑电控制的智能轮椅系统中,可以利用闭眼放松的脑电信号的Alpa波和左右手运动想象脑电信号的Beta波来实现对轮椅的控制[4]。而脑电信号很微弱且易受外部环境的干扰[5],其处理的算法也非常复杂。对于利用脑电信号进行控制的系统,处理脑电的步骤一般包括信号的滤波、特征提取、信号分类和转换。脑电特征提取方法主要有小波(包)分析、功率谱法和共空间模型等。而脑电信号的分类方法中最主要的包括线性判别法、支持向量机法和人工神经网络等[6]。 由于脑机接口的研究很复杂,许多处理算法也只是处于离线的理论研究阶段,实际操作的可靠性也有待提高。本文主要研究了脑电数据的离线处理方法,运用AR模型估计方法验证了想象数据的可分离性,然后使用感知器算法对信号的特征进行分类,并基于BCI2000平台将其转换为控制信号,达到了控制外部轮椅设备的目的。该操作平台的优点是:不利用人体的肢体动作就可以实现对轮椅运动方向的控制,成本较低,为行动有障碍的残疾人士提供了一个自由的控制平台,对今后进一步实现轮椅的集成控制有重要意义。 1 BCI2000试验平台 BCI2000是一种能描述任意BCI系统的模型,该模型由4个相互联系的功能模块构成:数据获取模块(数据的采集和存储)、信号处理模块、用户应用程序模块、操作员模块,。这4个模块各自分离,并通过TCP/IP协议进行相互通信[7]。 在BCI2000系统运行过程中,每次数据获取模块获得一组脑电数据后,就发送给信号处理模块,在此对脑电数据进行信号的特征提取和模式分类,并将分类的结果转化为控制命令发送给用户应用模块。每个模块各自实现自己的功能,它们之间的通信协议不受信号的通道数和采样率、信号处理的复杂度和所需要控制的外部设备等因素的限制[7]。 2 脑电信号分析 2.1 特征分析 在想象运动中Mu节律的能量高低及分布可用于对数据进行分类,并且可以通过训练用户控制Mu节律的能量高低和分布状况来实现对外部设备的控制[8]。本设计利用Mu节律的能量幅值变化来研究人脑下达不同运动意识指令时EEG的表现特征,并且将时域特征与频域特征结合作为时频特征。实验中,利用刺激界面使被试者进行左右手运动的想象动作,从提示到结束的时间为9 s,同时记录下被试者的脑电数据,将通过电脑采集的脑电数据存储到计算机内。最后利用MATLAB进行数据分析,提取脑电数据的特征向量。
毕业论文﹙设计﹚任务书 院(系) 机械工程学院专业班级学生姓名 一、毕业论文﹙设计﹚题目电动轮椅车设计 二、毕业论文﹙设计﹚工作自 2014 年 3 月 5 日起至 2014 年 5 月 28 日止 三、毕业论文﹙设计﹚进行地点: 四、毕业论文﹙设计﹚的内容要求: 1、设计课题简介 电动轮椅是一种以蓄电池为能源、电子装置控制驱动的动力轮椅车。使用者可通过控制装置自行驱动轮椅车行进。适用于高位截瘫、偏瘫及下肢功能障碍者使用。本课题主要是设计一款含有机械传动减速机构的电动轮椅,使学生充分利用所学知识,初步锻炼产品的总体设计和研究能力。 2、论文要求: 1)通过查阅有关资料,了解产品总体设计的方法和步骤; 2)设计的电动轮椅要方便操作使用; 3)所确立的设计方案应按照产品总体设计方法和步骤进行,确保科学合理; 4)论文应包括对电动轮椅进行安全、强度和力学方面的设计计算数据。 3、工作任务与要求: 1)充分了解电动轮椅的结构特点及构造,了解设计的主要内容,并进行市场调查。 2)搜集各类电动轮椅的资料,包括相关的国家标准及最新成果。 3)设计多个方案,并从选出总体设计方案后对总体设计进行细化。 4)对设计进行校核,确保方案的可行性,绘制总装图和关键零件图。撰写研究设计论文一份。4.工作任务时间安排:
第1-3周:了解产品总体设计的方法和步骤,搜集有关电动轮椅的资料,包括设计的相关国家标准及最新研究成果,撰写毕业设计开题报告一份。 第4-6周:通过市场调查已有的电动轮椅驱动机构结构,设计出相应的总体设计方案。 第7-12周:设计控制方式及电路,绘制总装示意图和关键零件图,撰写毕业论文。 5、设计说明书格式要求: 设计说明书应包括:序言、目录、摘要(中英文)、关键词(中英文)、中图分类号、正文(含设计方案论证、设计及其它说明等)、结束语和参考文献等内容,并按照封页、设计任务书、序言、目录、摘要、关键词、正文、结束语、参考文献和封底的顺序装订。 指导教师系(教研室) 系(教研室)主任签名批准日期 接受论文 (设计)任务开始执行日期学生签名
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910283794.X (22)申请日 2019.04.10 (71)申请人 广州思智科技有限公司 地址 510000 广东省广州市天河区天河北 路689号5楼自编11房 (72)发明人 肖怒海 党彦波 黄康军 周玉梅 (74)专利代理机构 北京高沃律师事务所 11569 代理人 程华 (51)Int.Cl. A61G 5/04(2013.01) A61G 5/10(2006.01) (54)发明名称 一种电动轮椅控制系统 (57)摘要 本发明公开了一种电动轮椅控制系统,包 括:轮椅控制装置、遥控装置和驱动装置;轮椅控 制装置中的第一无线通讯模块与第一主控制模 块连接;遥控装置包括遥控姿态检测模块、第二 无线通讯模块和第二主控制模块;遥控姿态检测 模块的输出端与第二主控制模块的输入端连接, 用于传输遥控装置的姿态信息;第二主控模块与 第二无线通讯模块连接;轮椅控制装置与遥控装 置通过第一无线通讯模块和第二无线通讯模块 进行数据交互;轮椅控制装置用于将来自于遥控 装置的控制信号发送至驱动装置;驱动装置的输 入端与轮椅控制装置的输出端连接,用于根据控 制信号控制轮椅的运动姿态。本发明提供的电动 轮椅控制系统具有控制方便、 操作简单的特点。权利要求书1页 说明书4页 附图2页CN 109846617 A 2019.06.07 C N 109846617 A
权 利 要 求 书1/1页CN 109846617 A 1.一种电动轮椅控制系统,其特征在于,包括:轮椅控制装置、遥控装置和驱动装置; 所述轮椅控制装置包括第一主控制模块和第一无线通讯模块;所述第一无线通讯模块与所述第一主控制模块连接; 所述遥控装置包括遥控姿态检测模块、第二无线通讯模块和第二主控制模块;所述遥控姿态检测模块用于检测遥控装置的姿态信息;所述遥控姿态检测模块的输出端与所述第二主控制模块的输入端连接;所述第二主控模块与第二无线通讯模块连接; 所述轮椅控制装置与所述遥控装置通过所述第一无线通讯模块和第二无线通讯模块进行数据交互;所述轮椅控制装置用于将来自于所述遥控装置的控制信号发送至所述驱动装置; 所述驱动装置的输入端与所述轮椅控制装置的输出端连接;所述驱动装置用于根据所述控制信号控制轮椅的运动姿态。 2.根据权利要求1所述的一种电动轮椅控制系统,其特征在于,所述遥控装置的姿态信息包括绕遥控装置X轴旋转的俯仰角,绕遥控装置Y轴旋转的横滚角与绕遥控装置Z轴旋转的偏航角。 3.根据权利要求1所述的一种电动轮椅控制系统,其特征在于,所述轮椅的运动姿态包括:运动速度、前进、后退、停止、左转和右转。 4.根据权利要求1所述的一种电动轮椅控制系统,其特征在于,所述轮椅控制装置还包括按键模块和摇杆模块; 所述摇杆模块的输出端与所述第一主控制模块的输入端连接;所述摇杆模块用于控制轮椅前进、后退、左转、右转和停止;所述按键模块的输出端与所述第一主控制模块的输入端连接;所述按键模块用于选择轮椅的运动速度、控制电源的开闭以及控制声音的有无。 5.根据权利要求4所述的一种电动轮椅控制系统,其特征在于,所述按键模块包括加键、减键、声音键、开机键和关机键; 所述加键和减键用于调整轮椅的运动速度;所述声音键用于控制轮椅发出的声音;所述开机键用于开启轮椅控制装置的电源;所述关机键用于关闭轮椅控制装置的电源。 6.根据权利要求1所述的一种电动轮椅控制系统,其特征在于,所述遥控装置还包括遥控按键模块;所述遥控按键模块的输出端与所述第二主控制模块的输入端连接;所述遥控按键模块用于输入控制轮椅运动姿态的信息。 7.根据权利要求6所述的一种电动轮椅控制系统,其特征在于,所述遥控按键模块包括发送键;所述发送键用于向所述轮椅控制装置发送轮椅的运动姿态信息。 8.根据权利要求1所述的一种电动轮椅控制系统,其特征在于,所述轮椅控制装置和遥控装置中均包括有LCD显示模块;所述LCD显示模块用于显示轮椅的运动姿态信息、剩余电量和故障信息。 2
第五章电动轮椅运动控制系统的软件设计在本系统的控制方案中,作者采用 TMS320LF2407A DSP 控制芯片作为系统的核心控制芯片。它具有很快的运行速度,丰富的片内外设等系统资源和强大的中断功能以及灵活丰富的指令集、高速运算能力、内部操作的灵活性、低功耗等特点,使得在系统的软件设计中,可以实现复杂的控制算法。 系统软件设计的终极目的是:实现两个电机平滑稳定的协调运动控制,实现轮椅控制器的人机交互功能,具备完善的故障保护功能,且可以和 PC 机通讯的功能,使得轮椅能够在各种允许路况下都具有非常平稳舒适的运行性能。 5.1 系统的软件设计方案 5.1.1 系统的控制方块图 由第二章可知,本系统是采用电压负反馈、电流截止负反馈和电流正反馈补偿的控制算法实现两台直流电机的协调运动控制。调节器是数字 PI 调节器。系统的控制方块图如图 5-1 所示: 图5-1 轮椅运动控制系统控制方块图 由图 5-1 可知,操纵杆的输出信号 X、Y 经过 S 曲线和左/右电机给定发生器后合成为左/右电机的给定信号,取电机两端电压以及电流采样电阻电压作为反馈信号。为了防止轮椅起动或堵转时电机电流过大,本文采用了具有电流截止负反
馈的电压闭环调速系统。电流正反馈补偿环节是为了补偿由于电枢电阻引起的速降以提高系统的机械特性。当轮椅运行在比较糟糕的路况时,轮椅的左/右电机在相同的给定下,负载大小可能不同,这时当用户本想径直前进时,轮椅可能由于左/右电机负载的不同,而转弯,图 5-1中的“负载不平衡时电流正反馈补偿”环节就是为克服这种情况而设计的。S 曲线的设置使得轮椅在起/制动时都能够非常平滑和舒适,保证了安全性。速度给定发生器和负载补偿仲裁器是两台电机协调控制的核心指挥部,它们保证了轮椅在二维平面上的自由运行。 5.1.2 本系统软件控制的时序 对于一个以 TMS320LF2407A 为核心控制芯片的控制系统来说,首要的任务是确定系统的时钟系统,其次是合理决定软件中的中断数量和顺序。 本系统在硬件上采用的是外部晶体振荡器,其频率是 10MHz,在软件中设定CPU时钟为 40MHz,PWM 载波频率为 20KHz,系统的中断频率和 AD 采样频率也都是20KHz。 5.2 系统软件的主要功能模块 本轮椅运动控制系统软件主要包括以下一些功能模块: (1)初始化模块; (2)上电时操纵杆中心位置检测程序; (3) AD 采样子程序; (4)电池电量检测子程序; (5)睡眠模式子程序; (6)锁存模式子程序; (7)鸣笛子程序; (8)加速度曲线给定子程序; (9)速度按键处理子程序;
毕业设计 论文题目: 学生: 指导教师: 专业: 班级: 2016年5 月
基于单片机的电动轮椅用手柄控制器设计 摘要 随着社会的进步与发展,残障人士的生活质量越来越受到人们的关注,因此用于疾病护理与康复方面的辅助器械就应运而生。电动轮椅是一种理想的代步工具,在社会上的需求量大,因此具有较高的研究价值。本次设计采用双后轮驱动模式,选用NEC公司生产的78K0系列单片机作为主控芯片。 首先,介绍了电动轮椅操纵杆控制器的研究与发展现状,并概述了电动轮椅操纵杆控制器的相关技术。其次,介绍了电动轮椅操纵杆控制器的基本原理,并作出相应的设计方案。第三,分析霍尔效应传感器的特性,本文选择了InSb线性霍尔效应传感器。并采用恒压控制方式,设计完成了操纵信号采集电路。然后,以NEC单片机为主控制芯片,完成手柄控制器的硬件电路设计包括显示、按键、电源转换及主控制器电路等。最后,选择LIN总线协议作为操纵杆控制器系统的通信协议,编写程序实现电路对蜂鸣器的控制、电池电量的显示、速度档位的显示、以及对电机的控制。 关键词:电动轮椅;手柄控制器;单片机;霍尔效应传感器
Based on single chip microcomputer design of the handle controller of electric wheelchair Abstract With the progress and development of society, the quality of life of people with disabilities more and more people's attention, so for disease care and rehabilitation assistive devices came into being.Electric wheelchair is an ideal means of transport, the demand in the community is large, and herefore has a high research value.The design uses a dual-rear-wheel drive model, the choice of NEC 78K0 series produced microcontroller as the master chip. Firstly, the status of research and development of electric wheelchair joystick, and an overview of the electric wheelchair joystick related technologies.Secondly, it introduces the basic principles of electric wheelchair joystick,and make the appropriate design.Third, the analysis features Hall effect sensor, the paper chose InSb linear Hall-effect sensors. And constant pressure control mode, designed to complete the manipulation signal acquisition circuitry.Then, NEC microcontroller-based control chip to complete the hardware circuit design handle controller includes a display, keypad, power conversion, and the main controller circuit.Finally, select the LIN bus protocol as the communication protocol joystick system, the preparation of program control circuit buzzer, battery power display, speed gear display, and control of the motor. Key words:Electric wheelchair; handle controller; Single chip microcomputer; Hall effect sensor