第5章点的复合运动
5.1复合运动中的基本概念
5.2复合运动中的运动方程之间的关系
5.3复合运动中的速度之间的关系
一、目的要求:
1、使学生了解速度和加速度的矢量式
2、理解绝对运动,相对运动和牵连运动
3、使学生对合成运动问题能恰当地选择动点,动系和定系,并能较正确的判定点的绝对,相对和牵连运动
4、使学生掌握速度合成定理,并能较正确应用它解点的速度合成运动问题。
二、重点:绝对运动,相对运动和牵连运动的概念,速度合成定理及其应用。
难点:牵连运动,牵连点,动点,动系的选择
三、学时安排:4学时
四、教学准备:幻灯片
五、教学过程
导入新课:
5.1复合运动中的基本概念
一、概念:
1、静参考系:固定在地球上的坐标。
2、动参考系:固定在其它相对于地球运动的参考体上的坐标,
3、复杂运动:研究物体相对于不同参考系的运动,分析物体相对于不同参考系运动之间的关系,可称为复杂运动和合成运动。
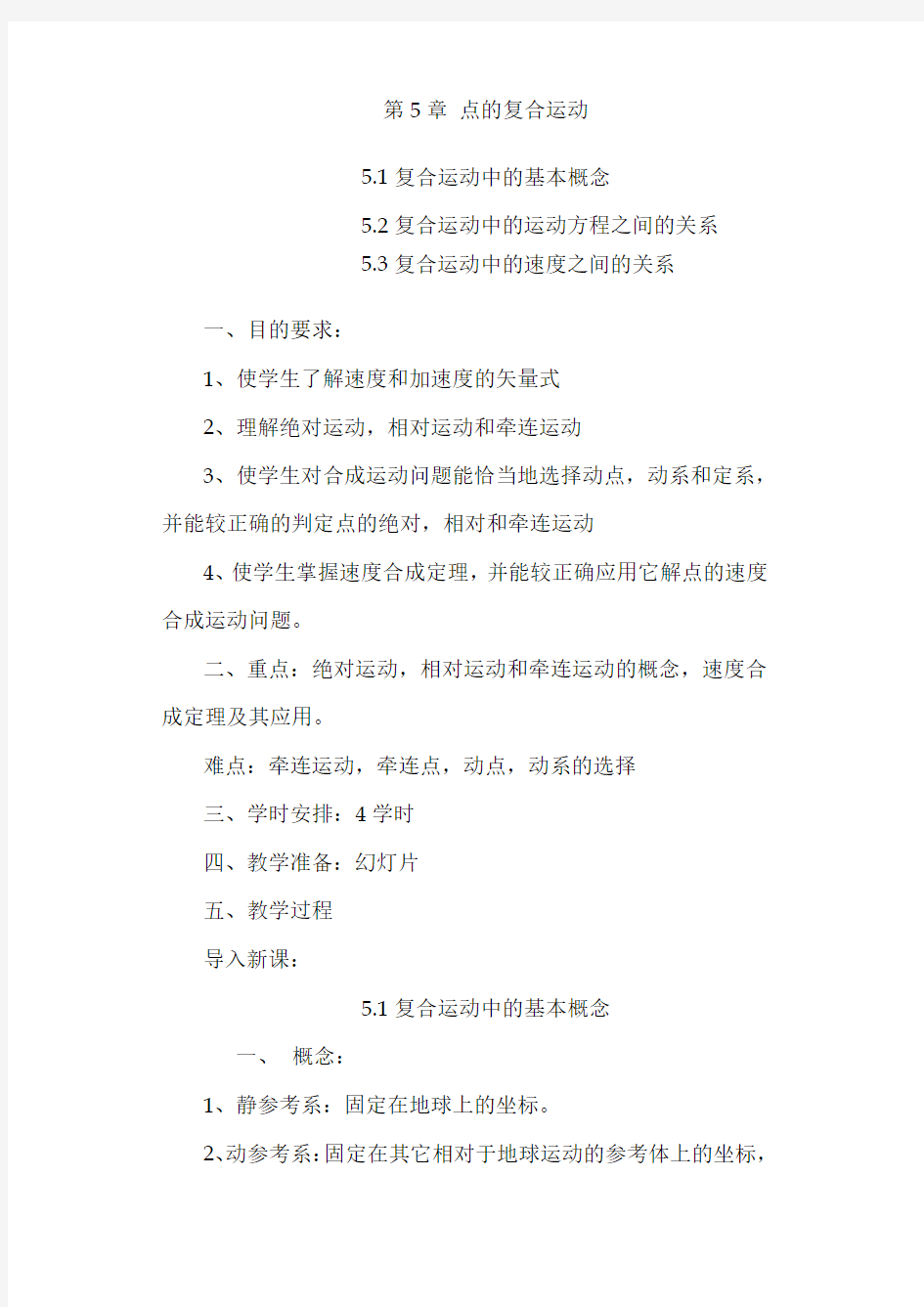
实例之一:小船自左岸边A向后岸边B点运动,河水以均匀速度v运动,小船最终到到右岸的D点。
(1)动系中小船对动系来说是直线运动,从
(2)静系中:动系对静系则是直线运动。小船从A→B,C→D。
(3)同时性:先假设河水不动,则小船从A划到B:在假设人不划船,小船随河水漂流到下游D处。实际上小船和水是同时运动的,小船动点的运动是上述两个简单运动的合成
C
A
v
图5-1 小船的复合运动图5-2车轮轮缘上点M的复合运动实例之二:研究沿地面作直线滚动的车轮轮缘上点M的运动(1)静系中:动点的轨迹是旋轮线车厢作直线运动
(2)动系中:M 动点作圆周运动
(3)运动的同时性,M点运动和平动是同时进行的,M点既跟随着动系一起平动,又在动系上作圆周运动。旋轮线就是这两个运动的合成运动的轨迹,轮缘上M点的运动就是这两个简单
运动的合成。
实例3:在大梁固定不动时,卷杨小车沿大梁可作直线运动,同时将吊钩上的重物A铅垂向上提升,研究重物的运动称合成运
动
(1)静系中:A→B
(2)动系中:A →A’
(3)同时性:点:A →A’
小车:A→B
重物既跟随动系一起向右平动,图5-3吊重物的复合运动又在动系上从下往向运动,重物的运动是两个简单运动的合成。
三. 三种运动绝对相对牵连
1、绝对运动:动点相对于静系的运动,即人站在地面上观察点的真实运动。
2、相对运动:动点相对于动系的运动,即人站在动系上(或人站在运动的物体上)观察点的运动。
3、牵连运动:动点随动系相对于静系的运动,即人站在地面上观察动点随动系的运动。由于动系上各个点的运动速度一般是不同的(动系作平动除外),在同一瞬时,动系上与动点位置相重合的点称为牵连点,含有牵连点的动系相对于定系的运动即为牵连运动。(为平动或转动或复杂运动的动系相对于定系的运动注:绝对运动是相对运动和牵连运动的合成。
4、动系、动点的选取原则:
(1)动点、动系和静系必须分别选在三个物体上。静系一般固定在地面或与地固连的机架上,即静系固定在不动的物体上。
(2)动点和动系不能选在同一个运动的刚体上,若选在同一个刚体上,动点对动系就不会有相对运动。
(3)动点相对动系的相对运动轨迹简单、明显,如相对轨迹是直线,圆等。
(4)动系的运动要容易判定,如平动和转动等。
(5)对于有约束联系的系统,例如机构转动问题,动点多选取主动件与从动件的连接点,并与其中一个构件固接,而动系固定在另一运动的构件上。
(6)对于没有约束联系的系统,所研究的点为动点,如雨滴,矿砂,物料:动系固定在另一运动的物体上,如车辆,转送带,
四、三种速度绝对速度相对速度牵连速度
1、绝对速度:动点相对于定系运动的速度
2、相对速度:动点相对于动系运动的速度。
3、牵连速度:牵连点相对于动系运动的速度
动坐标系是一个包含与之固连的刚体在内的运动空间,除动坐标系作平移外,动坐标系上各点的运动状态是不相同的。在任意瞬时,只有牵连点的运动能够给动点以直接的影响。为此,定义某瞬时,与动点相重合的动坐标系上的点(牵连点)相对于静
坐标系运动的速度称为动点的牵连速度。动点和牵连点是一对相伴点。
例如,直管OB 以匀角速度
ω绕定轴O 转动,小球M 以速
度u 在直管OB 中作相对的匀速直线运动,如图示。将动坐标系固结在OB 管上,以小球M 为动点。随着动点M 的运动,牵连点在动坐标系中的位置在相
应改变。设小球在t 1、t 2瞬时分别到达M 1、M 2位置,则动点的牵连速度分别为
1122e e OM OM ω
ω=?=?v v
五、实例简述三种运动. 三种速度 1、小船过河
(1)动系、定系、动点分别在河水上、河岸上、小船。 (2)运动分析:小船(从A → B )相对于河水的运动是相对运动,其速度为相对速度r v ,小船随河水的漂动(即从A → C )是牵连运动,河水的流速为牵连速度e v ,小船自A 到D 的运动是绝对运动,其速度为绝对速度a v 。
2、前进中的车轮缘上动点M :
(1)动系—车厢、定系—地、动点—轮子。
(2)旋轮线的运动是绝对运动,其速度为绝对速度a v ;
动点
图5-4 牵连点 牵连速度
随车厢的平动为牵连运动,车在前进中的速度为牵连速度e v ;动点绕轴心的转动为相对运动,其速度为e v 。
3、被提升的重物(向上向前运动) (1)动系—大梁,动点—重物,定系—地面
(2)重物相对于小车的铅垂向上的运动为相对运动,其速度为r v :重物随小车的平动为牵连运动,其速度为e v ;重物自A 到A 1的运动为绝对运动,其速度为a v 。
5.2复合运动中的运动方程之间的关系
一、 用矢径表示的运动方程 1、Oxyz: ()a a t x ==r r i +yj +zk
a r ──绝对矢径。是动点矢量形式的绝对运动方程;其矢端
曲线就是动点的绝对轨迹。
2、O ’x ’y ’z ’: ()'r r t x ==r r i +y'j +z'k
r r ──相对矢径,相对运动方程,相对轨迹。
O
y
图5-5 矢径表示 图5-6 直角坐标表示 二、用直角坐标表示运动方程。
'
'
cos sin sin cos O O x x x'-y'y y x'y'??
??
?=+??=++??
在点的绝对运动方程中消去时间t ,即得点的绝对运动轨迹;在点的相对运动方程中消去时间t ,即得点的相对运动轨迹。 例如清华《教材》P.97例5-1。
5.3 复合运动中速度之间的关系
一、解析法求速度
将三种运动方程之间的关系式对时间连续求导,可得三种运动中速度之间与加速度之间的关系,这就是求解点的复合运动的解析法。 例如清华《教材》P.98例5-2。
二、速度合成定理
1、绝对速度应是相对速度和牵连速度合成的矢量。
=+v v v a e r
2、推导: (1)几何证明:
动点在一个任意运动的刚体K 上沿弧AB 相对于刚体K 运动,动坐标系固结刚体K 上,静坐标系固结在地面上。
瞬时t ,动点位于M 处,?t 后动点运动到1M ‘处。绝对运动轨迹
1MM ‘,M 1是瞬时t 的牵连点,1MM 是此牵连点的轨迹。
图5-7 速度合成定理
111111110001111
000lim lim lim lim
lim lim t t t a e r t t t a e r MM MM M M MM MM M M t t t MM MM M M t t t
?→?→?→?→?→?→''''=+=+???''
===???=+v v v v v v 点的速度合成定理是矢量式,有两个投影方程,可求解2个未知量,3个速度矢量共6个量(大小 方向),若知道其中任意4个量,即求出其余两个量。 (2)矢量证明
e r
a e r r ω=+?=+'o v v v v v
(1)当牵连运动为平动0ω=,动系上各点速度相同,故
e ='
o v v
(2)当牵连运动为定轴转动,0='o v ,故e r r ω=?v 。 三、运用点的速度合成定理解题的方法步骤 1、分析题意,确定动点,动系和定系。 2、分析三种运动,三种速度。
(1)凡速度大小可以算出的求出其值,凡方向已知的画出其方向。
(2)作速度平行四边形求解未知量,a v 是e r 、v v 为邻边的对角线,利用合矢量投影定理或解三角形求未知量。
例5-1如图所示,车厢以速度 1v 沿水平轨道行驶,雨点垂直下落,现测得雨点对车厢的相对速度的方向与铅垂线成 角,且偏向车厢运动相反的方向,试求雨点相对于地面的速度。
图5-8 雨点的运动分析
(1)运动分析:雨点为动点,动系固连在小车上,如图所示。动点的绝对运动是铅垂向下的直线运动:动点的相对运动为与铅垂线成 φ 角的直线运动;牵连运动是车厢的平动与车厢牵连点的平动;
(2)速度分析:速度平行四边形表示a v 、r v 、e v 的关系
c tan tan a ??
=
e
v v =v 1 例5-2:有常接触点: 已知:θ、u 水平向右。DE 杆沿滑槽上下运动,求DE 杆的速度。
图5-9 有常接触点的运动分析之一
〈1〉 运动分析:从动杆下端D 为常接触点,取其为动点,动点的绝对运动为铅垂向上的直线运动,相对运动为沿斜面向上的直线运动,牵连运动为尖辟的平动。
v 1
v
〈2〉 速度分析:速度平行四边形见图。 〈3〉 求DE 杆的速度:
大小:tan tan a u θθ=e v v =,
方向:铅垂向上,e v 为牵连点的平动速度。
例5-3:有常接触点 已知:OC=e
,=R , 轮以匀角速度ω0绕轴O 转动,求当OC 与AC 垂直时从动杆AB 的速度。
(1)三选动系与轮固定,随轮绕O 转动,
(2)运动分析:动点的绝对运动是铅垂向上的直线运动动点的相对运动是绕的几何中心C 的圆周运动,牵连运动为绕O 的定轴转动,即牵连点绕O 的圆周运动,
方法一:
(3)速度分析:速度平行四边形,e v 为牵连点绕O 的圆周
运动速度。0tan 3a ωθω==e v v =
方法一 方法二 图5-10 有常接触点的运动分析之二
方法二:
(1)动系为过C 点的平行坐标系,不与轮固接,相当于过C 点的平行的无限大的平板
(2)运动分析:牵连运动为平板的平动,而动系平动,其上各点的速度是相同的。=v v e C 即牵连点随板平动。
(3)速度平行四边形
03a ωωθ==v =e e
v cos
讨论:动系不同、v v e r 则不同,但v a 不变。
例5-4: 有常接触点
已知:曲柄OA 以r 、ω,匀速转动。带动摇杆的转动。 求:当30θ=摇杆的角速度1ω
图5-11 有常接触点的运动分析之三
分析:(1)三选:取曲柄OA 的端点A (即滑块A )常接触点为动点。机座上固连定系Oxy 摆杆OB 上固连动系Ox ’y ’。
(2)运动分析:滑块A 的绝对运动是以O 为圆心,r 为半径的圆周运动:动点的相对运动为沿OB 的直线运动;牵连运动为摆杆的定轴转动(绕O 2)即牵连点随动系的转动
(3)速度分析:作速度平行四边形,e v 为动系上的牵连点的速度
2211sin sin sin sin /sin 4
e a r v v O A r r ωθω
θωωθωωθθ=→?=→=
==
例5-5 无常接触点
图形凸轮的半径r ,偏心距e ,以及绕O 转动,杆AB 能在滑槽上下平动,杆的下端A 紧贴在凸轮上,试求:AB 杆与凸轮圆心在一直线上时,杆AB 的速度。
图5-12 无常接触点的运动分析之四
(1)三选:两构件上均无常接触点。可任取凸轮上的接触点或杆AB 上的接触点为动点。因为AB 杆为平动,各点速度均相同,求出其上任意一点的速度即可。故取AB 杆的下端接触点M 为动点,动系,定系。
(2)运动分析:M 点的直线运动为绝对运动,M 点相对于动系的运动轨迹是圆,绕C 点的几何中心定轴转动;牵连点的运动即凸轮绕O 点圆周运动为牵连运动。
(3)速度分析:e v 为动系上牵连点O 的圆周运动速度
cos cos cos ()a e e e
v v r r e r r
??ω?ωω=
====向上 练习1:有常接触点
正弦机构的曲柄OA 绕固定轴O 匀速转动,通过滑块带动槽杆BC 作水平往复平动。已知:r 、ω、φ。求BC 杆的速度。
图5-13 有常接触点的运动分析之四
(1)三选:常接触点为动点。
(2)动点绕O 的定轴转动为绝对运动,动点相对于槽的直线运动为相对运动;动系牵连点的运动为牵连运动。
(3)作速度平行四边形,A OA ⊥v ,r v 沿导槽向上,e v 沿水平方向e a r ?ω?==v v sin sin ,e v 为牵连点缩导槽的平动速度。
练习2: 对下列各图进行运动分析
°
°
图5-14 动点M的运动分析
x
v
图5-15 动点M的运动分析图5-16 平移杆ABC的速度
e
ω
a
v = v= v /l=v sinφ/l
图5-17 求OA杆的角速度图5-18 求OB、OC杆的角速度
小结:三选
点的
运动
绝对
运动
重合
点的
运动点
的
运动相对
运动动系上与动点重合的点动点
动系
(刚体运动)
牵连运动牵
连运动定系
作业:P.109 5-6、7
5.4 复合运动中加速度之间的关系
5.4.1 牵连运动为平动时的加速度合成定理
5.4.2牵连运动为定轴转动时的加速度合成定理
一、目的要求:使学生掌握加速度合成定理。并能较正确应用它解点的加速度合成运动问题。
二、重点:加速度合成定理及其运用。
难点:加速度合成定理的运用与计算;牵连速度、牵连加速度及科氏加速度的概念。
三、学时:2学时
四、教学准备:幻灯片
五、教学过程
导入新课:
5.4 复合运动中加速度之间的关系
一、牵连运动为平动时的加速度合成定理
1、三种加速度:
绝对加速度
a:动点相对定系的加速度。
a
相对加速度
a:动点相对动系的加速度。
r
牵连加速度
a:牵连点相对定系的加速度。
e
2、牵连运动为平动时点的加速度合成定理:(三种运动的轨迹可能都是曲线)
(1)矢量表达:
牵连运动:动系xAyz 平动,因此,e A e A a ==v v a , 相对运动:,r r x y z x y z =++=++v i j k a i j k
(
a e r
a e r a A A a A r a e r
t t t
x y z t t t
x y z =+→
=+→=+++=+++→++或v v v v v v v v i j v i j k
a =a a a =a a d d d d d d d d d
d d d
图5-19 动系平动时的加速度合成定理推导
动点的绝对加速度a a 是相对加速度r a 、牵连加速度e a 的矢量和。绝对加速度a a 是合矢量,r a 、e a 是a a 的分量。
n n
n
n n n
a e r ττττττ=+=+=+=+????????→+=+++e e e r r r
a a a
a a a a a a a a e e r r a a a a a a a a a a a a ,
(2)投影式:
可以将加速度合成定理的矢量表达式的等号左右部分向某轴投影,可得到合矢量a a 在某轴上的投影等于r a 、e a 在同一轴上的投影的代数和。在平面问题中,加速度合成定理的矢量表达式中,各矢量有大小和方向两个因素,可向两个互不平行的两个坐标轴投影,得两个代数方程,求解两个未知量。
加速度与速度合成公式一样均为二维矢量方程,每个量均有大小、方向两个因素,只有当方程中未知因素的个数不超过两个时,可以解出需求的未知量。矢量方程可通过解三角形的办法求
解,或者在一组线性无关的轴上投影得到代数方程组的方法求解。
①三个法向加速度6个要素,三个法向加速度的方向可以确定,大小通过速度分析可以求解出来:
222
n n n a
e
r
v v v ρρρ=
=
、=
、a
e
r a
e
r
a a a
②三个切向加速度6个要素,若知到其中4个因素,余下的2个因素就完全可以求解出来。
3、解题步骤
(1)三选;(2)运动分析 ;(3)速度分析; (4)加速度分析,画加速度矢量图。 加速度矢量图
注意:只能求解两个未知量 例5-6 已知:00R ωα、、
求:曲柄与导杆轴线夹角θ时,杆a 滑块A 为动点 分析:(1)三选:动系与导杆固接,定系与机架固接。 (2)运动分析:绕O 轴的定轴转动为绝对运动,在导槽的直线运动为相对运动,牵连运动为到导杆的水平直线平动。 (3)速度分析:动点有绕O 点匀速圆周运动的角速度0
ω
(4)加速度分析:、a a 只有沿法线分量a n =a a ,方向由A 指向O ;
因相对运动是直线运动,r a 沿铅垂直槽;因动参考系为平动,各点轨迹为水平直线,故 e a 是沿水平方向。共有四个要素已知,可
作出加速度平行四边形如图:由图中三角形关系得:
(a ) (b) 图5-20 牵连运动为平动时的加速度合成实例之一
2
=cos cos n a e r
n e a a r θωθ
=+==a
a (b) a a a a 2cos sin cos sin n n
a x n a (b)a a a a r r a ττ
θθωθαθ=+=+=-+=--+=-a a e r
a a e e
a a a a a 例5-6:已知:凸轮向右作减速直线运动,r ?、、、u a 。已知:求导杆AB 在图示位置时的加速度.
图5-21 牵连运动为平动时的加速度合成实例之二 分析:(1)三选:动点为导杆AB 上的A 点,动系与凸轮固接,定系与地面固接。
(2)运动分析:A 点随导杆AB 沿铅垂导槽做的上下直线为绝对运动,A 在凸轮上的圆周运动为相对运动,牵连运动为凸轮的水平向右的减速直线运动。
(3)速度分析:A 点随导杆的上下直线速度为绝对速度,A 在凸轮上的圆周运动速度为相对速度,牵连速度即为凸轮的平动速度。
(4)加速度分析:、只有相对加速度才有切向和法向之分,作出加速度矢量如图。法向加速度可通过2/v r
2
22
23sin cos 0sin cos c tan sin sin 900()900()
n
e v a n n r a e r e r r a e r a a
a a a a a a a u u a a a a r r a a ητ???????
??=
==+=++???
→????→=++→=+→=+
<>↓><↑方向投影
r a a a a a a ,;,
例5-7:平面机构中,曲柄OA=r , 0ω匀速转动,套简A 可沿BC 杆滑动。已知:BC=l 。求图示位置时,杆BD 的α和角速度ω。
图5-21 牵连运动为平动时的加速度合成实例之三
分析:(1)三选(2)运动分析(3)速度分析:画速度平行四边形
第5章 点的复合运动分析 5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。若d 为已知,试求曲杆O 1BC 的角速度。 解:1、运动分析:动点:A ,动系:曲杆 O 1BC ,牵连运动:定轴转动,相对运动:直线, 绝对运动:圆周运动。 2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω == A O v BC O (顺时针) 5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆 BC 上。曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。当机构在图示位置时, 曲柄与水平线交角 30=φ。求此时滑杆CB 的速度。 解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。 2、速度分析:r e a v v v += πω401a =?=A O v cm/s ; 12640a e ====πv v v BC cm/s 5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。曲柄 OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。已知曲 柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。试求滑块滑道中的相对运动方程,以及摇杆的转动方程。 解:分析几何关系:A 点坐标 d t r x +=ω?cos cos 1 (1) t r x ω?sin sin 1= (2) 习题5-1图
(1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 t rd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 2 2 222221++=+++= 将(1)、(2)式相除,得: 2.摇杆转动方程: d t r t r += ωω?cos sin tan d t r t r +=ωω?cos sin arctan 5-4 曲柄摇杆机构如图所示。已知:曲柄O 1A 以匀角速度ω1绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。试求当O 1A 水平位置时,杆BC 的速度。 解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。 1a ωR v A =;2 2122 2a e R b R R b R v v A A += +=ω 2、B 点:动点:B ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:直线。 2 21222e e R b b LR A O B O v v A B += =ω 2 1222e a b LR b R b v v v B B BC ω=+== 5-5 如图示,小环M 套在两个半径为r 的圆环上,令圆环O '固定,圆环O 绕其圆周上一点A 以匀角速度ω转动,求当A 、O 、O '位于同一直线时小环M 的速度。 解:1、运动分析:动点:M ,动系:圆环 O ,牵连运动:定轴转动,相对运动:圆周运动, 绝对运动:圆周运动。 2、速度分析:r e a v v v += ωr v 3e = ωr v v v M =?==30tan e a 5-6 图a 、b 所示两种情形下,物块B 均以速度B υ、加速度a B 沿水平直线向左作平移,从而推动杆OA 绕点O 作定轴转动,OA = r ,?= 40°。试问若应用点的复合运动方法 C 习题5-4图 A v A v 习题5—5图
2- 1凸轮以匀角速度绕°轴转动,杆AB的A端搁在凸轮上。图示瞬时AB杆 处于水平位置,°A为铅直。试求该瞬时AB杆的角速度的大小及转向解:V a V e V r 其中,v e. r2e2 V a V e tg e v e 所以AB a(逆时针) 求当0时,顶杆的速度 2-2.平底顶杆凸轮机构如图所示 转动,轴0位于顶杆轴线上为 R,偏心距OC e, 顶杆AB可沿导轨上下移动, 工作时顶杆的平底始终接触凸轮表面 凸轮绕轴0转动的角速度为 偏心圆盘绕轴0 该凸轮半径 ,0C与水平线成夹角 A
(1)运动分析 轮心C 为动点,动系固结于AB ;牵连运动为上下直线平移,相对运动为与平底 平行直线,绝对运动为绕0圆周运动。 (2)速度分析,如图b 所示 V - V - V a e r 方向 丄OC 1 - 大小 ? ? y 肋二人二 v a cos 14.1 图示半径为r 的半圆形凸轮在水平面上滑动,使直杆OA 可绕轴O 转动。OA=r ,在图示瞬时杆OA 与铅垂线夹角 30=θ,杆端A 与凸轮相接触,点O 与O 1在同一铅直线上,凸轮的的速度为v ,加速度为a 。求在图示瞬时A 点的速度和加速度。并求OA 杆的角速度和角加速度。 14.2 图示机构中AB =CD=EF =l ,设在图示位置时45θ?== ,杆EF 的角速度为ω,角加速度为0,求此 时杆AB 的角速度与角加速度。 以滑块F 为动点,动系固结于BD 杆上,定系固结于地面,牵连运动为平动。动点的速度矢量合成图如图(a )所示,则有 e a v v = 而,e AB a v l v l ωω==,所以 AB ωω=(顺时针转向) 。 动点的加速度矢量合成图如图(b )所示。其中2a a l ω=,22n e AB a l l ωω==,t e AB a l ε= 将t n a r e e a a a a =++ 向水平方向投影得 sin 45cos45sin 45n t a e e a a a =-- 22AB εω=-(顺时针转向) ( b ) ( a ) 14.3 圆盘的半径cm R 32=,以匀角速度s rad 2=ω,绕O 轴转动,并带动杆AB 绕A 轴转动,如图。求机构运动到A 、C 两点位于同一铅垂线上,且 30=α时,AB 杆转动的角速度与角加速度。 14.4 图示平面机构中,杆O 1A 绕O 1轴转动,设O 2B = L ,在图示? = 30°位置时,杆O 1A 的角速度为ω ,角加速度为零。试求该瞬时杆O 2B 转动的角速度与角加速度。 解:以铰链为动点,杆O 1A 为动系。有 ω?ωωL L B O v B 2 1 sin 1e ==?= r e B B B v v v +=, ω? L v v B B == sin e , 23cos r ω?L v v B B == 2 v v e =1 v v =AB r v v =0 45 45 v r =N B C .第七章 点的合成运动习题解 [习题7-1] 汽车A 以h km v /401=沿直线道路行驶,汽车B 以h km v /2402=沿另一叉道行驶。求在B 车上观察到的A车的速度。 解: 动点:A 车。 动系:固连于B 车的坐标系。 静系:固连地面的坐标系。 绝对运动:动点A 相对于地面的运动。 相对运动:动点A 相对于B 车的运动。 牵连运动:在动系中,动点与动系的重合点, 即牵连点相对于静系(地面)的运动。当A、 B两车相遇时,即它们之间的距离趋近于0时, A、B相重合,B车相对于地面的速度就是 牵连速度。2v v e =。由速度合成定理得: → → → +=r e v v v 。用作图法求得: h km v v AB r /40== (↑) 故,B车上的人观察到A车的速度为h km v v AB r /40==,方向如图所示。 [习题7-2] 由西向东流的河,宽1000m ,流速为0.5m/s ,小船自南岸某点出发渡至北岸,设小船相对于水流的划速为1m/s 。问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方向?渡河时间需多久? 解:(1) 动点:船。 动系:固连在流水上。 静系:固连在岸上。 绝对运动:岸上的人看到的船的运动。 相对运动:船上的有看到的船的运动。 牵连运动:与船相重合的水体的运动。 绝对速度:未知待求,如图所示的v 。 相对速度:s m v r /1=,方向如图所示。 牵连速度:s m v e /5.0=,方向如图所示。 由速度合成定理得: → → → +=r e v v v 第5章 点得复合运动分析 5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。若d 为已知,试求曲杆O 1BC 得角速度。 解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。 2、速度分析: ; (顺时针) 5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径, 圆心O 1在导杆上。曲柄长,以匀角速绕O 轴转动。 当机构在图示位置时,曲柄与水平线交角。求此时滑杆CB 得速度。 解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。 2、速度分析: cm/s; cm/s 5-3 图示刨床得加速机构由两平行轴O 与 O 1、曲柄OA 与滑道摇杆O 1B 组成。曲柄OA 得末端与滑块铰接,滑块可沿摇杆O 1B 上得滑道滑动。已知曲柄OA 长r 并以等角速度转动,两轴间得距离就是OO 1 = d 。试求滑块滑道中得相对运动方程,以及摇杆得转动方程。 解:分析几何关系:A 点坐标 (1) (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 将(1)、(2)式相除,得: 2.摇杆转动方程: 5-4 曲柄摇杆机构如图所示。已知:曲柄O 1A 以匀角速度ω1 绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。试求当O 1A 水平位置时,杆BC 得速度。 解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。 ; 2、B 点:动点:B ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:直线。 5-5 如图示,小环套在两个半径为得圆环上,令圆环固定, 圆环绕其圆周上一点以匀角速度转动,求当、、位于同一直线时 小环M 得速度。 解:1、运动分析:动点:M ,动系:圆环O ,牵连运动:定轴转动, L ω1 O 1 A B O 2 C O v A e v B e v A a v B a v B r v A r 习题54图 C l l θ ω0 O A v a v r v e 习题51图 O 习题52图 v a v r v e 习题53图 O 习题5—5图 v e v a v r 第14章 点的复合运动 工程力学学习指导 第14章 点的复合运动 由于运动的相对性,在不同的参考系中,对于同一动点,其运动方程、速度和加速度是不相同的。许多力学问题中,常常需要研究一点在不同参考系中的运动量(速度和加速度)的相互关系。 本章用定、动两种参考系,描述同一动点的运动;分析两种结果之间的相互关系,建立点的速度合成定理和加速度合成定理。 点的运动的合成与分解是运动分析方法的重要内容,在工程运动分析中有着广泛的应用;同时可为相对运动动力学提供运动分析的理论基础;点的复合运动分析方法还可推广应用于分析刚体的复合运动。本章是“工程运动学基础” 篇的重点内容。 14.1 教学要求与学习目标 1. 准确理解本章阐述的若干概念,如:动点、动系、三种运动、三个速度、三个加速度以及科氏加速度等。尤其要注意牵连速度、牵连加速度与科氏加速度的概念与计算。 2.明确动点与动系的选择原则,能在具体问题中恰当地选择动点与动系,并正确地分析三种运动。 3. 应用速度、加速度合成定理解题时,能正确地确定各已知量,明确问题的可解性(未知量数目与方程数相等)。使用投影式时会选择恰当的投影轴。 14.2 理 论 要 点 14.2.1 动点、定系、动系与三种运动 一般工程问题中,通常将固连在地球或相对地球不动的机架上的坐标系, 称为定参考系,简称定系,以Oxyz 坐标系表示;固定在其他相对于地球运动的参考体上的坐标系称为动参考系,简称动系,以z y x O ′′′′坐标系表示。 所研究的点称为动点。 动点(研究对象)相对于定系的运动,称为动点的绝对运动。动点相对于定系的运动速度和加速度,分别称为动点的绝对速度和绝对加速度,分别用符号a v 和a a 来表示。 动点相对于动系的运动,称为动点的相对运动。动点相对于动系的运动速度和加速度,分别称为动点的相对速度和相对加速度,分别用符号r v 和r a 来表示。 动系相对于定系的运动,称为牵连运动。 由于除了刚体平移以外,一般情形下,刚体上各点的运动并不相同。动系上每一瞬时与动点相重合的那一点,称为瞬时重合点(又称牵连点)。由于动点相对于动系是运动的,因此,在不同的瞬时,牵连点是动系上的不同点。 动系上牵连点相对定系的运动速度和加速度,定义为动点的牵连速度和牵连加速度,分别用符号e v 和e a 表示。 需要注意的是: 1) 动点的绝对运动和相对运动都是指点的运动,它可能作直线运动或曲线运动;而牵连运动则是指动系的运动,实际上是其所固连的参考体——刚体的运动,牵连运动可能是平移、定轴转动或其他较复杂的运动; 2) 牵连速度(加速度)是指牵连点的(绝对)速度(加速度),而牵连运动是指动参考体——刚体的运动。这在概念上是不同的,而其联系是牵连点是动参考体上的瞬时重合点; 3) 分析这三种运动时,必须明确:以哪一物体作为参考系。 14.2.2 速度、加速度合成定理 1. 速度合成定理 动点的绝对速度等于其牵连速度与相对速度的矢量和,即 a v =e v +r v 由于证明时没有对绝对运动和相对运动轨迹形状作任何限制,也没有对牵连运动为何种刚体运动作限制,因此速度合成定理对各种运动都是适用的。 10图示倾角?=30°的尖劈以匀速u =200 mm/s 沿水平面向右运动,使杆OB 绕O 轴转动, mm r =。求当?θ=时,杆OB 的角速度和角加速度。 解:取尖劈为动系,杆上B 为动点,其牵连运动为水平直线运动,相对运动为沿尖劈斜面的直线运动,绝对运动为绕O 点的圆周运动。速度分析如图(a)所示。 e v B v r v 由速度合成公式及几何关系可得: sin 30sin120e B v v == 故杆OB 的角速度为: 1/rad/s 3 B v r ω== 加速度分析如图(b)所示,其中0e a =,2Bn a r ω=。加速度合成公式为: B Bn e r τ+=+a a a a e a B τa r a Bn a 将上式向垂直于r a 的方向投影,得: sin30cos300Bn B a a τ+= 2B a r τ= 故杆OB 的角加速度为: 2rad/s B a r τε= = (顺时针) 12小环M 同时与半径为r 的两圆环如图相交,圆O ' 固定,圆环O 绕其圆周上一点A 以匀角速度ω转动。求当A 、O 、O ' 位于同一直线时两圆环交点M 的速度大小与加速度大小。 解: 取圆环O 为动系,M 点为动点,牵连运动为绕A 点的圆周运动,相对运动为沿圆环O 的圆周运动,绝对运动为沿则圆O ' 的圆周运动,速度分析如图(a)所示,其中e v ω。由几何关系可知,30MAO MBO '∠=∠= ,60MO O '∠= ,连线AM 为圆O '的切线,MB 为圆O 的切线。 v e v r v B (a) 速度合成公式为: e r =+v v v (1) 因此有: cot 60e v v r ω== /cos602r v v r ω== 加速度分析如图(b)所示,其中2 e a ω=,2 4c a r ω=,22 4r rn v a r r ω==,22n v a r r ω==。 第五章 点的合成运动 本章要点 一、绝对运动、相对运动和牵连运动 一个动点, 两个参照系: 定系,动系; 三种运动:绝对运动、相对运动和牵连运动, 包括三种速度:绝对速度、相对速度和牵连速度; 三种加速度:绝对加速度、相对加速度和牵连加速度; 牵连点:动参考系上瞬时与动点相重合的那一点称为动参考系上的牵连点。 二、速度合成定理 动点的绝对速度,等于它在该瞬时的牵连速度与相对速度的矢量和,即 r e a v v v += 解题要领 1 定系一般总是取地面,相对定系运动的物体为动系,动点不能在动系上. 2 牵连速度是牵连点的速度. 3 速度合成定理中的三个速度向量,涉及大小方向共六个因素,能且只能存在两个未知数方能求解,因此,至少有一个速度向量的大小方向皆为已知的. 4 作速度平行四边形时,注意作图次序:一定要先画大小方向皆为已知的速度向量,然后再根据已知条件画上其余两个速度向量,特别注意,绝对速度处于平行四边形的对角线位置. 5 用解三角形的方法解速度合成图. 三、加速度合成定理 1 牵连运动为平移时的加速度合成定理 当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和,即 r e a a a a +=, 当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成 n r t r n e t e n a t a a a a a a a +++=+ 其中 t v a d d a t a =,a 2a n a ρv a =,t v a d d e t e =,e 2e n e ρv a =,t v a d d r t r =,r 2r n r ρv a =,r e a ,,ρρρ依次为绝 对轨迹、牵连轨迹和相对轨迹的曲率半径。 解题要领 1牵连运动为平移时的加速度合成定理只对“牵连运动为平移时”成立,因此,判定牵连运动是否为平移至关重要. 2 牵连运动为平移时的加速度合成定理涉及的三个加速度,每一加速度都可能有切向和法向加速度。但是,法向加速度只与速度有关,因此,可以通过速度分析予以求解,从而在此处是作为已知的。剩下的三个切向加速度的大小方向共有六个因素,能且只能有2个未知量时方可求解。 3 因加速度合成定理涉及的矢量较多,一般不用几何作图的方法求解,而是列投影式计算,千万不能写成“平衡方程”的形式。 4 在加速度分析中,因动点和动系的选择不当而出现了一种似是而非的分析过程。教材中例5.3.5的一个典型错误解法如下: 例:半径为r 的半圆凸轮移动时,推动靠在凸轮上的杆OA 绕O 轴转动,凸轮底面直径DE 的延长线通过O 点,如图所示。若在 30=?的图示瞬时位置,已知凸轮向左的移动速度为u ,加速度为a 且与u 反向,求此瞬时OA 杆的角速度ω与角加速度α。 ·75· 第7章 点的合成运动 一、是非题(正确的在括号内打“√”、错误的打“×”) 1.点的速度和加速度合成定理建立了两个不同物体上两点之间的速度和加速度之间的 关系。 ( √ ) 2.根据速度合成定理,动点的绝对速度一定大于其相对速度。 ( × ) 3.应用速度合成定理,在选取动点和动系时,若动点是某刚体上的一点,则动系不可以固结在这个刚体上。 ( √ ) 4.从地球上观察到的太阳轨迹与同时在月球上观察到的轨迹相同。 ( × ) 5.在合成运动中,当牵连运动为转动时,科氏加速度一定不为零。 ( × ) 6.科氏加速度是由于牵连运动改变了相对速度的方向而产生的加速度。 ( √ ) 7.在图7.19中,动点M 以常速度r v 相对圆盘在圆盘直径上运动,圆盘以匀角速度ω绕定轴O 转动,则无论动点运动到圆盘上的什么位置,其科氏加速度都相等。 ( √ ) 二、填空题 1.已知r 234=++v i j k ,e 63=-ωi k ,则k =a 18 i + -60 j + 36 k 。 2.在图7.20中,两个机构的斜杆绕O 2的角速度均为2ω,O 1O 2的距离为l ,斜杆与竖直方向的夹角为θ,则图7.20(a)中直杆的角速度=1ωθ θωcos sin 2 ,图7.20(b)中直杆的角速 度=1ω2ω。 图7.19 图7.20 3.科氏加速度为零的条件有:动参考系作平动、0=r v 和r e v ω//。 4.绝对运动和相对运动是指动点分别相对于定系和动系的运动,而牵连运动是指牵连点相对于定系的运动。牵连点是指某瞬时动系上和动点相重合的点,相应的牵连速度和加速度是指牵连点相对于定系的速度和加速度。 5.如图7.21所示的系统,以''Ax y 为动参考系,Ax'总在水平轴上运动,AB l =。则点B 的相对轨迹是圆周,若kt ?= (k 为常量),点B 的相对速度为lk ,相对加速度为2lk 。 第七章点的合成运动 一、是非题 1、牵连速度是动参考系相对于固定参考系的速度。 × 2、不论牵连运动的何种运动,点的速度合成定理v a=v e+v r皆成立。() 答案:√ 3、在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。() 答案:× 4、当牵连运动为平动时,相对加速度等于相对速度对时间的一阶导数。() 答案:√ 5、用合成运动的方法分析点的运动时,若牵连角速度ωe≠0,相对速度υr≠0,则一定有不为零的科氏加速度。()答案:× 6、若将动坐标取在作定轴转动的刚体上,则刚体内沿平行于转动轴的直线运动的动点,其加速度一定等于牵连加速度和相对加速度的矢量和。()答案:√ 7、刚体作定轴转动,动点M在刚体内沿平行于转动轴的直线运动,若取刚体为动坐标系,则任一瞬时动点的牵连加速度都是相等的。()答案:× 8、当牵连运动定轴转动时一定有科氏加速度。() 答案:× 9、如果考虑地球自转,则在地球上的任何地方运动的物体(视为质点),都有科氏加速度。() 答案:× 二、选择题 1.在点的合成运动问题中,当牵连运动为平动时------。 ①一定会有科氏加速度②不一定会有科氏加速度③一定没有科氏加速度 答案:③ 2.平行四边形机构,在图示瞬时,杆以角速度转动。 滑块M相对AB杆运动若取M为动点,AB为动坐标, 则该瞬时动点的牵连速度与杆AB 间的夹角为------。 ①②③④ 答案:② 3、长L 的直杆OA ,以角速度ω绕O 轴转动,杆的A 端铰接一 个半径为r 的圆盘,圆盘相对于直杆以角速度ωr 绕A 轴转动。今 以圆盘边缘上的一点M 为动点,OA 为动坐标,当AM 垂直OA 时,点M 的相对速度为 。 A υr =L ωr ,方向沿AM ; B υr =r (ωr -ω),方向垂直AM ,指向左下方; C υr =r (L 2+r 2)1/2ωr ,方向垂直OM ,指向右下方; D υr =r ωr ,方向垂直AM ,指向在左下方。 答案:D 4、直角三角形板ABC ,一边长L ,以匀角速度ω绕B 轴转动,点M 以S=Lt 的规律自A 向C 运动,当t=1秒时,点M 的相对加速度的大小αr= ;牵连加速度的大 小αe = ;科氏加速度的大小αk = 。 方向均需在图中画出。 A L ω2; B 0; C 3 L ω2; D 23 L ω2。 答案:B A D 5.圆盘以匀角速度ω0绕O 轴转动,其上一动点M 相对于圆盘以匀速u 在直槽内运动。若以圆盘为动系,则 当M 运动到A 、B 、C 各点时,动点的牵连加速度的大 小 ,科氏加速度的大 小 。 A 相等; B 不相等; C 处于A ,B 位置时相等。 答案:B A 6.一动点在圆盘内运动,同时圆盘又绕直径轴x 以角速度ω转动,若AB ∥OX ,CD ⊥OX ,则当动点沿 运动时,可使科氏加速度恒等于零。 A 直线CD 或X 轴; B 直线CD 或AB ; C 直线AB 或X 轴; D 圆周。 答案:C 习 题 7-1 如图7-26所示,光点M 沿y 轴作谐振动,其运动方程为:x = 0,)cos(θω+=t A y ,式中,A 、ω、θ均为常数。如将点M 投影到感光记录纸上,此纸以等速v e 向左运动,试求点在记录纸上的轨迹。 图7-26 t v x e =' )c o s ()c o s (e θωθω+'=+=='x v A t A y y 7-2 用车刀切削工件的端面,车刀刀尖M 的运动方程为 t b x ωsin =,其中b 、ω为 常数,工件以等角速度ω逆时针方向转动,如图7-27所示。试求车刀在工件端面上切出的痕迹。 图7-27 t b t y t x x ωωωsin sin cos ='-'= 0c o s s i n ='+'=t y t x y ωω 解得 )2s i n (2 c o s s i n s i n t a n c o s s i n t b t t b t t t t b x ωωωωωωω==+=' ]1)2[cos(2 sin tan 2-=-='-='t b t b t x y ωωω 4 )2()(222 b b y x = +'+' 7-3 河的两岸相互平行,如图7-28所示。设各处河水流速均匀且不随时间改变。一船 由点A 朝与岸垂直的方向等速驶出,经过10 min 到达对岸,这时船到达点B 的下游120 m 处的点C 。为使船A 能垂直到达对岸的点B ,船应逆流并保持与直线AB 成某一角度的方向航行。在此情况下,船经12.5 min 到达对岸。试求河宽L 、船相对于水的相对速度v r 和水的流速v 的大小。 图7-28 m/s 2.0600120== v 600r L v = 船A 能垂直到达对岸的点B 750a L v = 2 a 22r v v v += 2222.0)750 ()600(+=L L m 200)750 1()6001(2 .02 2=-=L m/s 31r =v 7-4 半径R = 60mm 的半圆管BC 绕定轴OO 1按规律)5(t t -=?转动,点在管内运动, 第5章点的复合运动 5.1复合运动中的基本概念 5.2复合运动中的运动方程之间的关系 5.3复合运动中的速度之间的关系 一、目的要求: 1、使学生了解速度和加速度的矢量式 2、理解绝对运动,相对运动和牵连运动 3、使学生对合成运动问题能恰当地选择动点,动系和定系,并能较正确的判定点的绝对,相对和牵连运动 4、使学生掌握速度合成定理,并能较正确应用它解点的速度合成运动问题。 二、重点:绝对运动,相对运动和牵连运动的概念,速度合成定理及其应用。 难点:牵连运动,牵连点,动点,动系的选择 三、学时安排:4学时 四、教学准备:幻灯片 五、教学过程 导入新课: 5.1复合运动中的基本概念 一、概念: 1、静参考系:固定在地球上的坐标。 2、动参考系:固定在其它相对于地球运动的参考体上的坐标, 3、复杂运动:研究物体相对于不同参考系的运动,分析物体相对于不同参考系运动之间的关系,可称为复杂运动和合成运动。 实例之一:小船自左岸边A向后岸边B点运动,河水以均匀速度v运动,小船最终到到右岸的D点。 (1)动系中小船对动系来说是直线运动,从 (2)静系中:动系对静系则是直线运动。小船从A→B,C→D。 (3)同时性:先假设河水不动,则小船从A划到B:在假设人不划船,小船随河水漂流到下游D处。实际上小船和水是同时运动的,小船动点的运动是上述两个简单运动的合成 C A v 图5-1 小船的复合运动图5-2车轮轮缘上点M的复合运动实例之二:研究沿地面作直线滚动的车轮轮缘上点M的运动(1)静系中:动点的轨迹是旋轮线车厢作直线运动 (2)动系中:M 动点作圆周运动 (3)运动的同时性,M点运动和平动是同时进行的,M点既跟随着动系一起平动,又在动系上作圆周运动。旋轮线就是这两个运动的合成运动的轨迹,轮缘上M点的运动就是这两个简单 2-1 凸轮以匀角速度ω绕O 轴转动,杆AB 的A 端搁在凸轮上。图示瞬时AB 杆处于水平位置,OA 为铅直。试求该瞬时AB 杆的角速度的大小及转向。 解: r e a v v v += 其中,22e r v e -=ω e v v e a ωφ==tg 所以 l e l v a AB ωω== (逆时针) 2-2. 平底顶杆凸轮机构如图所示,顶杆AB 可沿导轨上下移动,偏心圆盘绕轴O 转动,轴O 位于顶杆轴线上。工作时顶杆的平底始终接触凸轮表面。该凸轮半径为R ,偏心距e OC =,凸轮绕轴O 转动的角速度为ω,OC 与水平线成夹角?。求当?=0?时,顶杆的速度。 (1)运动分析 轮心C 为动点,动系固结于AB ;牵连运动为上下直线平移,相对运动为与平底平行直线,绝对运动为绕O 圆周运动。 (2)速度分析,如图b 所示 2-3. 曲柄CE 在图示瞬时以ω0绕轴E 转动,并带动直角曲杆ABD 在图示平面运动。若d 为已知,试求曲杆ABD 的角速度。 解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。 2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1 ωω== A O v BC O (顺时针) 2-4. 在图示平面机构中,已知:AB OO =1,cm 31===r B O OA ,摇杆D O 2在 D 点与套在A E 杆上的套筒铰接。OA 以匀角速度rad/s 20=ω转动, cm 332==l D O 。试求:当?=30?时,D O 2的角速度和角加速度。 杭州师范大学学校505条目的4类题型式样及交稿式样 1. 选择题 题号: 分值:3分 难度系数等级: 令电子的速率为v ,则电子的动能E k 对于比值v/c 的图线可用下列图中哪一个图表示?(c 表示真空中光速) [ ] 答案:(D ) 题号: 分值:3分 难度系数等级: 根据相对论力学,动能为0.25 MeV 的电子,其运动速度约等于 ( c 表示真空中光速, 电子的静止能5.020 c m MeV) (A )c 1.0 (B )c 5.0 (C )c 75.0 (D )c 85.0 [ ] 答案:(C ) 题号: 分值:3分 难度系数等级: 粒子的动能等于它本身的静止能量,这时该粒子的速度为 (A ) c 2 3 (B )c 43 (C )c 21 (D )c 54 [ ] 答案:(A ) 题号: 分值:3分 难度系数等级: 一个电子运动速度v=0.99c ,它的动能是(电子的静止能量是0.51MeV) (A )3.5MeV (B )4.0MeV (C )3.1MeV (D )2.5MeV [ ] 答案:(C ) 题号: 分值:3分 难度系数等级: k E 是粒子的动能,p 是它的动量,那么粒子的静能20c m 等于 (A) k k E E c p 2/)(2 22- (B) k k E E pc 2/)(2- (C) 222k E c p - (D) k k E E c p 2/)(222+ [ ] 答案:(A ) 题号: 分值:3分 难度系数等级: 某核电站年发电量为100亿度,它等于36?15 10J 的能量,如果这是由核材料的全部静 止能转化产生的,则需要消耗的核材料的质量为 (A )0.4kg (B )0.8kg (C )12?7 10-kg (D ) 12 1 ?710-kg [ ] 答案:(A ) 题号: 分值:3分 难度系数等级: 粒子在加速器中被加速,当其质量为静止质量的3倍时,其动能相当于静止能量的 (A )2倍 (B )3倍 (C )4倍 (D )5倍 [ ] 答案:(A ) 题号: 分值:3分 难度系数等级: 把一个静止质量为0m 的粒子,由静止加速到0.6c (c 为真空中的速度) 需做的功等于 (A )0.1820c m (B )0.2520c m (C )0.3620c m (D )1.2520c m [ ] 答案:(B ) 题号: 分值:3分 难度系数等级: 在惯性系S 中,有两个静止质量都是0m 的粒子A 和B ,分别以速度v 沿同一直线相向运动,相碰后合在一起成为一个粒子复合,则在相对S 同样以v 匀速运动的S '系中看来,复合粒子的静止质量的值为 (A )02m (B ) 2 0) /(15.0c v m - (C ) 20)(12c v m - (D )2 0)/(12c v m - 理论力学课后习题答案-第5章--点的复合运动分析) 第5章 点的复合运动分析 5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。若d 为已知,试求曲杆O 1BC 的角速度。 解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。 2、速度分析:r e a v v v += 0a 2ωl v =;0 e a 2ωl v v == 1e 1ωω==A O v BC O (顺时针) 5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。当机构在图示位置时,曲柄与水平线交 角ο 30=φ。求此时滑杆CB 的速度。 解:1、运动分析:动 C l l θ ωO A v v v 习题5-1图 O ω ?习题5-2图 v v v 点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。 2、速度分析:r e a v v v += πω401 a =?=A O v cm/s ; 12640a e ====πv v v BC cm/s 5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。试求滑块滑道中的相对运动方程,以及摇杆的转动方程。 解:分析几何关系:A 点坐标 d t r x +=ω?cos cos 1 (1) t r x ω?sin sin 1 = (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 t rd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 222 22221 ++=+++= 将(1)、(2)式相除,得: 2.摇杆转动方程: d t r t r +=ωω?cos sin tan d t r t r +=ωω?cos sin arctan 习题5-3图第14章点的复合运动-习题
《理论力学》第七章点的合成运动习题解
理论力学课后习题集答案解析第5章点的复合运动分析)
第14章 点的复合运动
点的复合运动2011b
点的合成运动知识题解答080814
第7章 点的合成运动
第七章 点的合成运动练习
第七章点的合成运动习题解答
第5章点的复合运动.
点的合成运动 习题解答
第14章-狭义相对论-505-杭州师范大学
理论力学课后习题答案-第5章--点的复合运动分析)
相关主题
文本预览