
EWB基础教程
1.创建电路
(1)元器件操作
元件选用:打开元件库栏,移动鼠标到需要的元件图形上,按下左键,将元件符号拖拽到工作区。
元件的移动:用鼠标拖拽。
元件的旋转、反转、复制和删除:用鼠标单击元件符号选定,用相应的菜单、工具栏,或单击右键激活弹出菜单,选定需要的动作。
元器件参数设置:选定该元件,从右键弹出菜单中选Component Properties 可以设定元器件的标签(Label)、编号(Reference ID)、数值(Value)和模型参数(Model)、故障(Fault)等特性。
说明:①元器件各种特性参数的设置可通过双击元器件弹出的对话框进行;
②编号(Reference ID)通常由系统自动分配,必要时可以修改,但必须保证编号的唯一性;③故障(Fault)选项可供人为设置元器件的隐含故障,包括开路(Open)、短路(Short)、漏电(Leakage)、无故障(None)等设置。(2)导线的操作
主要包括:导线的连接、弯曲导线的调整、导线颜色的改变及连接点的使用。
连接:鼠标指向一元件的端点,出现小园点后,按下左键并拖拽导线到另一个元件的端点,出现小园点后松开鼠标左键。
删除和改动:选定该导线,单击鼠标右键,在弹出菜单中选delete 。或者用鼠标将导线的端点拖拽离开它与元件的连接点。
说明:①连接点是一个小圆点,存放在无源元件库中,一个连接点最多可以连接来自四个方向的导线,而且连接点可以赋予标识;②向电路插入元器件,可直接将元器件拖曳放置在导线上,然后释放即可插入电路中。
(3)电路图选项的设置
Circuit/Schematic Option对话框可设置标识、编号、数值、模型参数、节点号等的显示方式及有关栅格(Grid)、显示字体(Fonts)的设置,该设置对整个电路图的显示方式有效。其中节点号是在连接电路时,EWB自动为每个连接点分配的。
2.使用仪器
(1)电压表和电流表
从指示器件库中,选定电压表或电流表,用鼠标拖拽到电路工作区中,通过旋转操作可以改变其引出线的方向。双击电压表或电流表可以在弹出对话框中设置工作参数。电压表和电流表可以多次选用。
(2)数字多用表
数字多用表的量程可以自动调整。下图是其图标和面板。
其电压、电流档的内阻,电阻档的电流和分贝档的标准电压值都可以任意设置。从打开的面板上选Setting 按钮可以设置其参数。
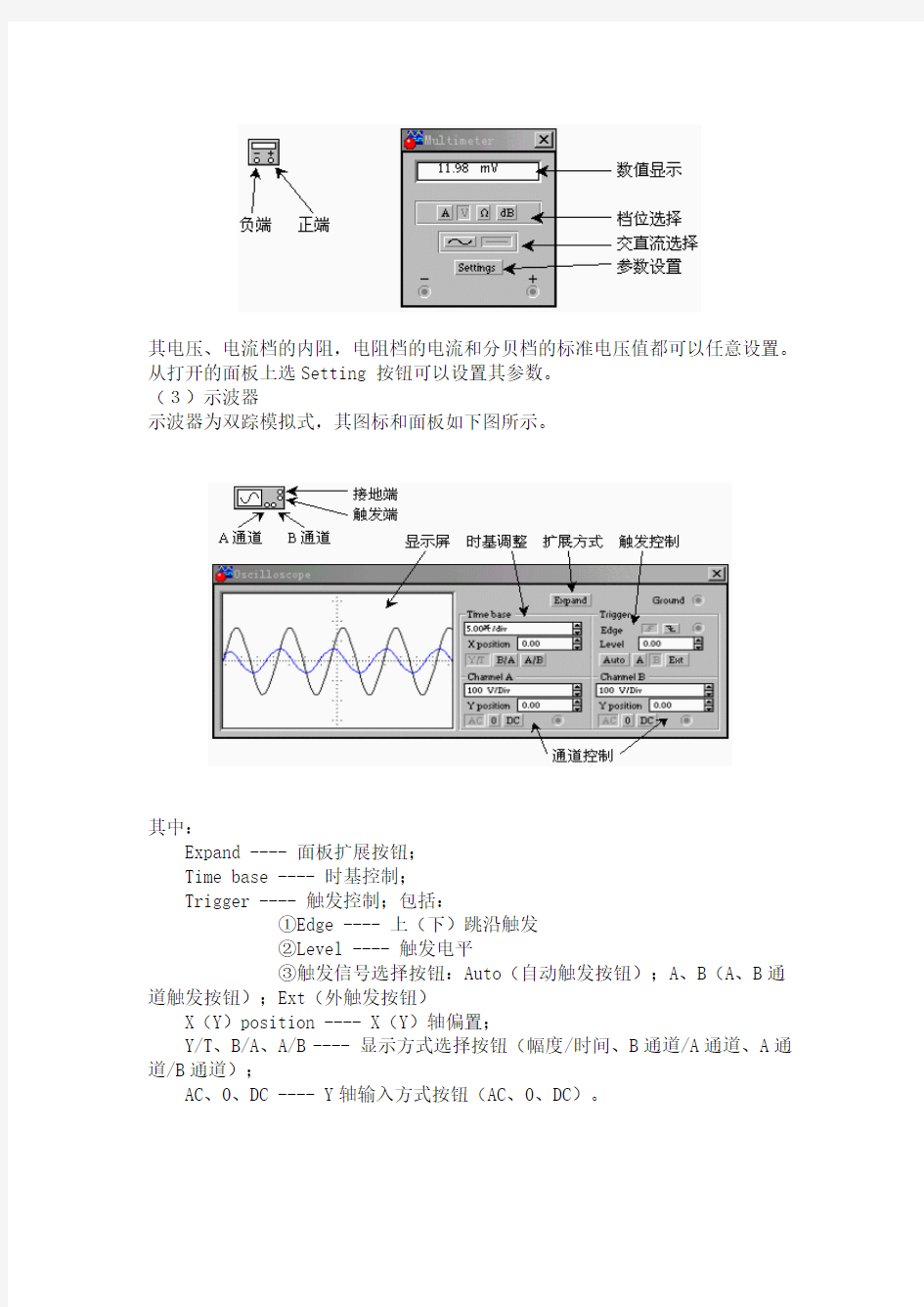
(3)示波器
示波器为双踪模拟式,其图标和面板如下图所示。
其中:
Expand ---- 面板扩展按钮;
Time base ---- 时基控制;
Trigger ---- 触发控制;包括:
①Edge ---- 上(下)跳沿触发
②Level ---- 触发电平
③触发信号选择按钮:Auto(自动触发按钮);A、B(A、B通道触发按钮);Ext(外触发按钮)
X(Y)position ---- X(Y)轴偏置;
Y/T、B/A、A/B ---- 显示方式选择按钮(幅度/时间、B通道/A通道、A通道/B通道);
AC、0、DC ---- Y轴输入方式按钮(AC、0、DC)。
(4)信号发生器
信号发生器可以产生正弦、三角波和方波信号,其图标和面板如下图所示。可调节方波和三角波的占空比。
(5)波特图仪
波特图仪类似于实验室的扫频仪,可以用来测量和显示电路的幅度频率特性和相位频率特性。波特图仪的图标和面板如下图所示。
波特图仪有IN和OUT两对端口,分别接电路的输入端和输出端。每对端口从左到右分别为+V端和-V端,其中IN端口的+V端和-V端分别接电路输入端的正端和负端,OUT端口的+V端和-V端分别接电路输出端的正端和负端。此外在使用波特图仪时,必须在电路的输入端接入AC(交流)信号源,但对其信号频率的设定并无特殊要求,频率测量的范围由波特图仪的参数设置决定。
其中:
Magnitude(Phase)---- 幅频(相频)特性选择按钮;
Vertical(Horizontal)Log/Lin ---- 垂直(水平)坐标类型选择按钮(对数/线性);
F(I)---- 坐标终点(起点)。
3.元件库中的常用元件
EWB带有丰富的元器件模型库,在电路分析软件实验中要用到的元件及其参数的意义如下。
(1)信号源
(2)基本元件
4、元器件库和元器件的创建与删
对于一些没有包括在元器件库内的元器件,可以采用自己设定的方法,自建元器件库和相应元器件。
EWB自建元器件有两种方法:一种是将多个基本元器件组合在一起,作为一个"模块"使用,可采用下文提到的子电路生成的方法来实现;另一种方法是以库中的基本元器件为模板,对它内部参数作适当改动来得到,因而有其局限性。
若想删除所创建的库名,可到EWB的元器件库子目录名"Model"下,找出所需删除的库名,然后将它删除。
5、子电路的生成与使用
为了使电路连接简洁,可以将一部分常用电路定义为子电路。方法如下:首先选中要定义为子电路的所有器件,然后单击工具栏上的生成子电路的按钮或选择Circuit/Create Subcircuit命令,在所弹出的对话框中填入子电路名称并根据需要单击其中的某个命令按钮,子电路的定义即告完成。所定义的子电路将存入自定义器件库中。
一般情况下,生成的子电路仅在本电路中有效。要应用到其它电路中,可使用剪贴板进行拷贝与粘贴操作,也可将其粘贴到(或直接编辑在)Default.ewb 文件的自定义器件库中。以后每次启动EWB,自定义器件库中均自动包含该子电路供随时调用。
6、帮助功能的使用
EWB提供了丰富的帮助功能,选择Help/Help Index命令可调用和查阅有关的帮助内容。对于某一元器件或仪器,"选中"该对象,然后按F1键或单击工具栏的帮助按钮,即可弹出与该对象相关的内容。建议充分利用帮助内容。
7、基本分析方法
(1)直流工作点的分析
直流工作点的分析是对电路进行进一步分析的基础。在分析直流工作点之前,要选定Circuit/Schematic Option中Show nodes(显示节点)项,以把电路的节点号显示在电路图上。
(2)交流频率分析
交流频率分析即分析电路的频率特性。需先选定被分析的电路节点,在分析时,电路的直流源将自动置零,交流信号源、电容、电感等均处于交流模式,输入信号也设定为正弦波形式。
(3)瞬态分析
瞬态分析即观察所选定的节点在整个显示周期中每一时刻的电压波形。在进行瞬态分析时,直流电源保持常数,交流信号源随着时间而改变,电容和电感都是能量储存模式元件。在对选定的节点作瞬态分析时,一般可先对该节点作直流工作点的分析,这样直流工作点的结果就可作为瞬态分析的初始条件。
(4)傅里叶分析
傅里叶分析用于分析一个时域信号的直流分量、基频分量和谐波分量。一般
将电路中交流激励源的频率设定为基频,若在电路中有几个交流源时,可以将基频设定在这些频率的最小公因数上。
注:运行时开关的切换需在英文输入状态下才可操作。
EWB中双踪示波器的使用
在EWB中双踪示波器的使用如下
双踪示波器(Oscilloscope)
双踪示波器图标如图5.3.1所示,面板如图5.3.2所示。EWB的示波器外观及操作与实际的双踪示波器相似,可同时显示A、B两信号的幅度和频率变化,并可以分析周期信号大小、频率值以及比较两个信号的波形。
(1)示波器的连接
如图5.3.1所示:
①A(B)通道输入:信号A(B)接入端。
②信号接地端:A、B两信号的公共端,如果不接,则默认该公共端接地。
③外接触发端。
(2)示波器的调节。
如图5.3.2所示:
①时基控制(Time base),如图5.3.3所示。
● X轴刻度(s/div):控制示波屏上的横轴,即X轴刻度(时间/每格),调节范围为(0.10ns/div ~ 1s/div)。
● Y轴偏移(X position):控制信号在Y轴的偏移位置,调节范围为(-5 ~ 5)。
X=0:信号起点为示波器屏幕的最左边;
X>0:信号起点右移;
X<0:信号起点左移。
● 显示方式:共有三种,分别为:
Y /T :幅度/ 时间,横坐标轴为时间轴,纵坐标轴为信号幅度。
B /A :B电压/ A电压、
A /
B :A 电压/ B电压。
②A(B)信号通道控制调节,如图5.3.4所示。A、B通道调节方法一样。
● Y轴刻度:设定Y轴每一格的电压刻度,调节范围为(0.01mV/Div
~5kV/Div)。
● Y轴偏移:控制示波器Y轴方向的原点。Y=0,垂直原点在屏幕的垂直方向的中
点;Y>0时,原点上移;Y<0,原点下移。调节范围为(-3 ~ 3)。
● 输入显示方式(AC / 0 / DC):
AC方式:仅显示信号的交流成分;
0方式:无信号输入;
DC方式:显示交流和直流信号之和。
③触发控制(Tigger),如图5.3.5所示。
● 触发方式:上升沿触发和下降沿触发;
● 触发信号选择:
Auto按钮:自动触发;
A按钮:A通道触发;
B按钮:B通道触发;
Ext按钮:外触发。
如果希望尽可能显示波形或希望显示的波形平坦,一般选用Auto。
(3)示波器的接地(Ground)。
一般情况下,示波器的参考点设定为接地。在使用中,示波器的接地端可不接;但是,测试电路中必须有接地点,否则示波器不能正确显示。如果要在测量中让示波器使用其它点(电平)作参考点,则必须将该参考点接到示波器的“接地”
端Ground。
(4)面板展开显示(Expand)。
单击扩展按钮(Expand按钮),可将示波器屏幕扩展开来显示,并可准确读出波形数值。如图5.3.6,可以拖动红色指针1和蓝色指针2至合适位置,可直接在面板下方读出指针1和指针2所对应波形的时间和电压,以及指针1和指针2之间的时间和电压差。
图5.3.6 双踪示波器扩展面板
例:如图5.3.7所示,用示波器测试时钟信号信号源E1和交流信号源E2。
(1)信号源库中调出时钟信号源E1、交流电压源E2和示波器,并照图5.3.7所示连接好导线。E1参数设置为频率F = 50Hz、占空比D=50%、交流电压源E2,E2参数设置为电压v=5V、频率F=50Hz、初相位f=0。
(2)为更好地区别两个信号的显示波形,把E1信号源与示波器的连接导线设置为红色(双击元器件或连线即可设置其参数),E2与示波器的连接导线设置为蓝色。
(3)单击示波器图标,再单击Expand按钮,弹出示波器面板,调整时基控制(Time base)的X轴刻度设置为5.00ms/div、信号A和B通道的Y 轴设置为5v/div,启动电路仿真开关,按图所示调节指针,即可得到图5.3.8所示波形。
(4)停止仿真,可从示波器面板上读出测试的波形数据。
指针1所对应的数据值:T1=1.0401S、VA1 =0V、VB1
=124.3943mV;
指针2所对应的数据值:T2=1.0601S、VA2 =0V、VB2 =124.3943 mV;
指针1、2所对应的数据值差:
周期T2 - T1 = 1.0601S,
指针1对应的电压差:VA2 -VA1 = 0V,
指针2对应的电压差:VB1 - VB2 = 2.4944e-13V。
一般情况下,示波器连续显示并自动刷新所测量的波形。如果希望仔细观察和读取波形数据,可以在电路菜单栏Analysis的分析选项Analysis Options 中选择Pause after each Screen选项(示波器屏幕满暂停,当显示波形到屏幕右端时,分析会自动暂停。如要恢复运行,可单击Pause按钮或F9键)。
电子仿真软件MultiSIM最初由加拿大的IIT 公司推出,从Multisim2001开始到后来的Multisim7和Multisim8止;Multisim9到目前的Multisim10版本,已改由美国国家仪器公司(NI公司)所推出。Multisim版本每次升级,软件功能都有相应的提高,但它们的操作方法和电子电路虚拟仿真这一块内容几乎没有太
大的变化。也就是说,读者只要掌握和学会了Multisim7软件的使用方法,其它的版本也就触类旁通了。软件更新快,读者也不一定要一味去赶时髦,这要看你用软件做什么内容来决定,如果是初学者和一般电子电路虚拟仿真,学会和掌握Multisim7软件的使用方法已足够。一是上手快,二是获得软件容易。
当然,读者要进一步提高,要学LabVIEW技术,要学单片机仿真,要学UltiBoard 制版,那当然需要安装Multisim9或Multisim10版本了,但目前介绍这方面的专业书籍资料不太多,且新版本软件刚推出时不易得到、存在不够稳定等缺点;再说LabVIEW技术也不像电子电路仿真那样容易学会,它是属于构建虚拟仪器技术范畴;至于单片机仿真,软件目前只适用汇编语言,不能用C语言编程;且模块也仅有8051和8052两种,单片机仿真技术方面还不是太理想,有待于版本进一步升级和提高。
电子仿真软件MultiSIM的元件库中虽然收集了大量的常用电子元件,供读者调用搭建电路进行虚拟仿真,但有些读者有时用到的电子元件,MultiSIM的元件库中没有怎么办?下面就这个话题谈谈自己的一些处理方法,或许对读者有一些启发。
一、没有“热释电人体红外传感器”怎么办?
“热释电人体红外传感器”是一种新产品,电子仿真软件MultiSIM的元件库中没有。我们知道“热释电人体红外传感器”是一种能接收人体发出的微弱红外线,然后将它转换成微弱电信号的一种器件。既然我们知道了它的工作机理,很简单,我们可以用一个开关来代替它。将开关和电源连在一起,开关打开时表示电路没有接收到信号;开关闭合一下随即打开,表示电路已接收到人体走动的红外线信号,并已转换成电信号被接收,电路会动作,或控制的节能灯亮了,或控制的继电器闭合了等。图一是“热释电人体红外感应节能灯”的虚拟仿真电路,读者可以去试一下,开关J1闭合一下随即打开,看红色指示灯是否会亮一段时间,然后自动熄灭。在实际电路中,电路是控制交流灯泡的,这里采取了用红色指示灯来代替的变通方法,一般来说只要虚拟仿真成功了,做成实物也就没有大问题了(注:图中电阻R19是为了仿真时红色指示灯发光稳定添加的,实际电路可以不用;图一是在Multisim10软件下做的仿真,读者完全可以在Multisim7或“汉化特殊版Multisim8.3.30”软件下实现)。
图1
二、没有“光敏电阻”怎么办?
同样地,电子仿真软件MultiSIM的元件库中也找不到光敏电阻。比如图一的实际节能灯电路,要求天黑以后工作,白天不工作。这时在实际电路中就需要接上光敏电阻,光敏电阻接收到光照时,阻值降低,如MG45-13型光敏电阻亮阻≤5KΩ;相反,光敏电阻在黑暗中时,阻值升高,如MG45-13型光敏电阻暗阻≥5MΩ。既然知道了光敏电阻这一特性,我们就可以用两个电阻来分别代替它进行电路虚拟仿真。在图1的运放第9脚接一个5.1MΩ电阻到地,表示黑夜,接在此处的光敏电阻对原电路仿真没有任何影响,即开关J1闭合一下随即打开,红色指示灯会亮一段时间,然后自动熄灭;将接在此处的电阻换成5.1KΩ,表示白天,则开关J1闭合后红色指示灯始终不会亮。
三、如何对双向晶闸管控制交流灯泡进行虚拟仿真?
上述节能灯电路实际应用时,是用双向晶闸管来控制交流灯泡的亮和灭的,可以在电子仿真软件中搭建如图2所示虚拟仿真电路。先用“+10V”电源控制交流灯泡X1的发光如图3所示;再用“–10V”电源控制交流灯泡X1的发光如图4所示。以上虚拟仿真结果,实现了用双向晶闸管来控制交流灯泡发光的实验验证。实际上,双向二极管是受交流电的正、负半周电压控制的,这里也可用正、负直流电压来代替仿真,效果是一样的。
图2
图3
图4
四、没有“热敏电阻”怎么办?
同样地,电子仿真软件MultiSIM的元件库中也找不到热敏电阻。热敏电阻特性和光敏电阻相似,有负温度系数和正温度系数之分,如图5所示为一用负温度系数电阻控制电路,图中以普通电阻R4代替热敏电阻,打开仿真开关,当温度正常时,晶体管不工作,继电器K2常闭触点吸合,控制加热器加热;假设温度升高,负温度系数热敏电阻阻值减小,我们再用一个普通电阻R5并联到电阻R4上,模拟负温度系数热敏电阻阻值减小,这时再打开仿真开关,继电器K2常闭触点分开如图6所示,控制加热器停止加热(注:图5和图6是在Multisim7软件下做的仿真)。
图5
图6
五、结束语
以上所列例子都说明了,在应用电子仿真软件MultiSIM进行虚拟仿真时,有许多传感器或新器件,只要知道了它们的电特性或在电路中的作用,完全可以灵活采用变通的办法代替进行仿真,本来软件就是进行虚拟实验的,并不一定非要用真实元件不可,这样可以大大地拓宽电子仿真软件MultiSIM的应用范围。再说用软件仿真时不存在损坏和烧毁元件、仪器的问题,只要设计好了电路都可以试一试,仿真成功了就可以进行实际电路的组装和调试,不成功再修改电路重新仿真。
电子仿真技术MultiSIM软件更新很快,不断有新版本问世,一方面说明推出软件的公司资源雄厚、精益求精、不懈努力、与时俱进;另一方面,更说明了电子仿真技术MultiSIM市场看好、前途光明。特别是加拿大的IIT公司被美国国家仪器公司(NI公司)收购以后,实现了强强联合,在Multisim9和Multisim10版本中加强了LabVIEW技术,MCU仿真技术,VHDL仿真技术,Verilog HDL仿真技术,CommSIM 仿真技术,UltiBOARD制版技术等内容,使MultiSIM
软件性能更加先进和实用,相信不久的将来,MultiSIM技术会在国内受到广大电子工作者的喜爱,应用会越来越广泛。
PSPICE中的电路元器件类型描述
在运行于Windows环境下的PSPICE中,均采用图形方式描述需要仿真的电路。即在PSPICE提供的绘图编辑器中,画出电路图,并将其存为扩展名为sch的图形文件(计算机自动生成扩展名)。电路中用到的元器件、电源和信号源可从PSPICE提供的库中直接调用。
一个完整的电路,不仅包括电路的结构,而且还包含各元器件、信号源及电源的有关参数。电路的结构可以通过元器件符号以及它们之间的连线来描述;而参数则是在元件属性(Attributes)中描述的。描述一个元器件通常包括元器件符号名称、元器件在电路中的标号、元器件参数值等几部分内容。由于有源器件的参数较多,它们不直接在属性中给出,而是用专门的模型(Model)来描述,属性中只给出它的模型名称。仿真时,PSPICE从模型库中调出该元器件的参数值进行仿真。下面对电路元
件的描述作进一步的介绍。
表1.3.1
1. 电阻、电容和电感
别用关键字R、C和L来标识
电阻、电容和电感元件
(PSPICE中的元器件关键字
见表1.3.1所示)。在电路
中以关键字开头,后跟长度
不超过8个字符的字母或数
字作为它们的标号。例如,
R2、C e、L5。它们的参数在
元件属性的VALUE
例如,VALUE=10k。另外,在
IC项中还可以设置电容的初
始电压和电感的初始电流。
R、C和L
因此,在做统计分析时必须
将它们换成具有模型的元
件,如Rbreak、Cbreak和
Lbreak分别是带模型的电
阻、电容和电感元件。
2. 有源器件
有源器件在符号库中的
名称(NAME)通常以关键字
开头,后跟长度不超过8个
字符的字母或数字命名,如
Q2N2222表示一种NPN型
BJT。74系列的数字集成电路
芯片以它们的型号作为元器
件名称。
有源器件的参数均在它
们的模型中描述。在PSPICE中是按器件类型(DEVICE-TYPE)来建立模型的,这些类型如表1.3.1所示。同一类型的器件有相同的模型结构,只是具体参数值有所不同。例如,Q2N2222和Q2N3904均属NPN型BJT。
在模型库中,有源器件的模型名称(MODELNAME)与符号库中器件名称的命名方法类似。符号库(扩展名为slb的磁盘文件)与模型库(扩展名为lib的磁盘文件)是通过模型名称建立联系的。例如,Q2N2222、Q2N2222-X。
电路仿真的精度主要由元器件所选用的模型和模型参数来决定。PSPICE中选用了较精确的模型,其模型参数也很多,在多数情况下,可以忽略其中许多参数。PSPICE在分析时使用这些参数的缺省值(default value 计算机自动给出的值,也称为默认值)。表1.3.2中给出了几种器件常用的模型参数。
表1.3.2 几种元器件常用的模型参数
3. 信号源及电源
在电路描述中,信号源和电源是必不可少的。实际上电源可以看作是一种特殊的信号源。在PSPICE中,信号源被分为两类:独立源和受控源。表1.3.3给出了几种主要独立源。在类型名前加V表示电压源,加I表示电流源。受控源共分为四类如表1.3.4所示,它们可用来描述等效电路。
信号源的参数可在其属性中定义。例如,脉冲源的初始电压V1、脉冲电压V2、延迟时间TD、上升时间TR、下降时间TF、脉冲宽度PW、周期PER等,均可在其属性窗中赋值。
1.3.3 几种主要的独立源
由PSPICE过渡至NIMultisim
概览
SPICE(针对集成电路的仿真程序)是加利福尼亚大学伯克莱分校开发的模拟电路仿真器,是作为CANCER(除射频电路外的非线性电路计算分析)程序的一部分进行开发的。
过去的50年中,众多公司开发了大量不同的SPICE变体(包括HSPICE和PSPICE)。
SPICE以网表形式定义电路并使用参数仿真电路特性。网表描述电路中的部件及其连接方式。SPICE可以仿真DC工作点、AC响应、瞬态响应以及其它有用的仿真项目。
目录
1.为何采用本教程作为PSPICE到Multisim间的过渡?
2.1.0PSPICE过渡至Multisim教程:放置电阻和电容
3.2.0PSPICE过渡至Multisim教程:增加电源部件
4.3.0PSPICE过渡至Multisim教程:接线部件
5.4.0PSPICE过渡至Multisim教程:设置仿真
6.5.0PSPICE过渡至Multisim教程:运行仿真
7.6.0PSPICE过渡至Multisim教程:结语
为何采用本教程作为PSPICE到Multisim间的过渡?
本教程的目标受众为那些使用过PSPICE的Multisim用户,我们的目标是为这些正在积极寻找如何在Multisim中创建和仿真电路的用户提供进阶指南。本教程除了讲述如何在PSPICE中完成任务,同时亦为您提供使用Multisim的简单设置步骤。无论您是否有过操作其它仿真工具的经验,本教程均可帮助您迅速上手Multisim。这一评价来自于我们在斯坦福大学创建的优秀教程,见此处。
Multisim
如果您是首次使用Multisim,您可能会很快发现仿真环境和原理图捕获环境非常相似,只是传统的多级步骤和复杂过程已被简化,仿真变得更加简单。
1.0PSPICE过渡至Multisim教程:放置电阻和电容
1.1打开软件
在PSPICE中,仿真设计开始前,用户通常需要通过下列步骤(程序>>PSPICE 学生版>>原理图),打开“原理图”程序。
必须通过开始>>所有程序>>NationalInstruments>>电路设计套件
11.0>>Multisim11.0这一步骤打开Multisim
1.2放置Op-Amp
在PSPICE中,用户需要打开“获取新部件”窗口,然后在描述框中搜索“opamp”。搜索到合适的型号后,将其连接到对应的设备符号上,然后单击“放置并关闭”。此时需要正确定向部件。双击Op-Amp,用户就可以设置相应的仿真参数。
在Multisim中放置部件:
1.选择放置>>部件。
2.在“选择部件”对话框中,按照下图红圈内的参数设置界面(图1)。图中选择的为模拟组中的模拟_虚拟类。
3.在“部件区域”中,选择OPAMP_3T_VIRTUAL(红圈)。
4.单击OK,在黄框内放置部件。
5.左击鼠标,在原理图区域放置OPAMP。
6.右击部件,选择“垂直翻转”
7.此时会出现图2所示的原理图。
图1选择部件界面
图2.运算放大器
1.3放置电阻和电容
在PSPICE中,此时已返回“使用获取新部件”,可在此搜索名称为“R”和“C”的部件(对应为电阻和电容)。当用户在原理图中放置了两个电阻和一个电容之后,需要双击各个部件设定及更改参数数值。
在Multisim中,放置电阻和电容:
1.选择放置>>部件。
2.在“选择部件”对话框中,按照红圈内给出的参数进行设置。图示为选择基本组和电阻类(见图3)
3.在“部件区域”中输入电阻值-本例中为2K(蓝色区域)。
4.单击OK,在黄框内放置部件。
5.左击鼠标,在原理图区域放置电阻。
6.同样返回至部件选择指南。
智能蓝精灵 门禁考勤管理软件 使 用 说 明 书
软件使用基本步骤
一.系统介绍―――――――――――――――――――――――――――――2二.软件的安装――――――――――――――――――――――――――――2三.基本信息设置―――――――――――――――――――――――――――2 1)部门班组设置 -------------------------- 3 2)人员资料管理 -------------------------- 3 3)数据库维护 ---------------------------- 3 4)用户管理 ------------------------------ 3 四.门禁管理―――――――――――――――――――――――――――――4 1)通迅端口设置―――――――――――――――――――――――――4 2)控制器管理――――――――――――――――――――――――――4 3)控制器设置 ---------------------------- 6 4)卡片资料管理―――――――――――――――――――――――――11 5)卡片领用注册 ------------------------- 12 6)实时监控 ----------------------------- 13 五.数据采集与事件查询――――――――――――――――――――――――13六.考勤管理―――――――――――――――――――――――――――――14 1 )班次信息设置――――――――――――――――――――――――――14 2 )考勤参数设置--------------------------------------------------------- 15 3 )考勤排班------------------------------------------------------------- 15 4 )节假日登记―――――――――――――――――――――――――――16 5 )调休日期登记――――――――――――――――――――――――――16 6 )请假/待料登记―――――――――――――――――――――――――17 7 )原始数据修改――――――――――――――――――――――――――17 8 )考勤数据处理分析――――――――――――――――――――――――17 9 )考勤数据汇总―――――――—――――――――――――――――――18 10 )考勤明细表—―――――――――――――――――――――――――18 11 )考勤汇总表――――――――――――――――――――――――――18 12 )日打卡查询――――――――――――――――――――――――――18 13 )补卡记录查询—――――――――――――――――――――――――19
电路仿真软件的使用方法
河南机电高等专科学校软件实习报告 系部:电子通信工程系 专业:应用电子技术 班级:应电111 学生姓名: xxx 学号: xxxxxxxx
201x年xx月xx日 实习任务书 1.时间:201x年xx月xx日~201x年xx月xx日 2. 实训单位:河南机电高等专科学校 3. 实训目的:学习电路仿真软件的使用方法 4. 实训任务: ①了解电路仿真与EDA技术的基础常识; ②了解电路仿真软件的作用及其特点; ③了解软件仿真结果与实际电路结果的异同; ④熟悉电路仿真软件的界面,能熟练的在电路仿真软件环境中绘制电路图; ⑤能够使用电路仿真软件的各种分析功能对电路进行软件仿真; ⑥会使用电路仿真软件中的虚拟仪器对电路进行数据和波形等的测量; ⑦作好实习笔记,对自己所发现的疑难问题及时请教解决; ⑧联系自己专业知识,体会本软件的具体应用,总结自己的心得体会; ⑨参考相关的的书籍、资料,认真完成实训报告。
软件实习报告 前言:经过半学期深入地学习基础电路知识,我们终于有机会学习电路仿真用软件设计并检验电路,深入的理解电路定理,增加我们对专业的兴趣,增强我们的实际动手操作能力。 实习报告: 实验一、戴维南定理和诺顿定理的研究 一、实验目的 1、求出一个已知网络的戴维南等效电路。 2、求出一个已知网络的诺顿等效电路。 3、验证戴维南定理和诺顿定理的正确性。
二、实验器材 直流电压源 1个 电压表 1个 电流表 1个 电阻 3个 万用表 1个 三、实验原理及实验电路 任何一个具有固定电阻和电源的线性二端网络,都可以用一个串联电阻的等效电压源来代替,这个等效电压源的电压等于原网络开路时的端电压U oc ,或用一个并联电阻的等效电流源来代替,这个等效电压源的电压等于原网络开路时的端电压I sc 。下图电路中负载为RL ,试用EWB 仿真测得到除去负载后的二端网络的开路电压、短路电流以及等效电阻大小。 0.5Ω RL=0.25Ω
FANUC机器人仿真软件操作手册
2008年10月第1版ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (2) 1.1. 软件安装 (2) 1.2. 软件注册 (3) 1.3. 新建Workcell的步骤 (4) 1.3.1. 新建 (4) 1.3.2. 添加附加轴的设置 (11) 1.4. 添加焊枪,TCP设置。 (16) 1.5. Workcell的存储目录 (20) 1.6.鼠标操作 (22) 第二章创建变位机 (25) 3.1.利用自建数模创建 (25) 3.1.1.快速简易方法 (25) 3.1.2.导入外部模型方法 (42) 3.2.利用模型库创建 (54) 3.2.1.导入默认配置的模型库变位机 (54) 3.2.2.手动装配模型库变位机 (58) 第三章创建机器人行走轴 (66) 3.1. 行走轴-利用模型库 (66) 3.2. 行走轴-自建数模 (75) 第四章变位机协调功能 (82) 4.1. 单轴变位机协调功能设置 (82) 4.2. 单轴变位机协调功能示例 (96) 第五章添加其他外围设备 (98) 第六章仿真录像的制作 (102)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。
如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。 1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口,
实验一 Proteus仿真软件使用方法 一.实验目的: (1)了解Proteus仿真软件的使用方法。 (2)了解51单片机编程器Keil与Proteus仿真软件的联用方法。 二.实验要求: 通过讲授和操作练习,学会正确使用Proteus仿真软件及Keil编程及其联合调试。 三.实验内容: (1)Proteus 仿真软件介绍 Proteus 软件是由英国LabCenter Electronics 公司开发的EDA工具软件,由ISIS 和ARES两个软件构成,其中ISIS是一款便捷的电子系统仿真平台软件,ARES是一款高级的布线编辑软件。它集成了高级原理布线图、混合模式SPICE电路仿真、PCB设计以及自动布线来实现一个完整的电子设计。 通过Proteus ISIS软件的VSM(虚拟仿真技术), 用户可以对模拟电路、数字电路、模数混合电路,以及基于微控制器的系统连同所有外围接口电子元器件一起仿真。 图1是Proteus ISIS的编辑窗口: 图1 ISIS的编辑界面 图中最顶端一栏是“标题栏”,其下的“File View Edit ……”是“菜单栏”,再下面的一栏是“命令工具栏”,最左边的一栏是“模式选择工具栏”;左上角的小方框是“预览窗口”,其下的长方框是“对象选择窗口”,其右侧的大方框是“原理图编辑窗口”。 选择左侧“模式选择工具栏”中的图标,并选择“对象选择窗口”中的P按钮,就会出现如图2的元器件选择界面:
图2 元器件库选择界面 在元器件列表框中点击你需要的器件类型(例如:电阻-Resistors,单片机芯片-MicroprocessorICs, LED-Optoelectronics)或在左上角的关键字(Keywords)框中输入你需要的器件名称的关键字(如:信号源 - Clock, 运放 - CA3140等),就会在图2中间的大空白框列出你所需的一系列相关的元件。此时,你可用鼠标选中你要的元件,则图2右上角的预览框会显示你所要元件的示意图,若就是你要的元器件,则点击OK按钮,该元器件的名称就会列入位于图1左侧的“对象选择窗口”中(参见图1左侧下方框)。 所需元器件选择好后,在“对象选择窗口”选择某器件,就可以将它放到图1中的“原理图编辑窗口”中(若器件的方向不合适,你可以利用图1左下角的旋转按钮来改变它)。将所要的元器件都选好后,将它们安放到合适的位置,就可以用连接线把电路连接好,结果存盘(请按规定的目录存盘,并记住其路径/目录/文件名[学号-实验序号])。 (2)51单片机编程器– Keil V3的使用 Keil编程器可用于MCS-51单片机软件编程与调试,它的工作界面如图3所示: Keil编程器是Keil Software Inc/Keil Electronic GmbH 开发的基于80C51内核的微处理器软件开发平台,可以完成从工程(Project)的建立和管理、程序的编译和连接、目标代码的形成、软件仿真等一套完整的软件开发流程。它与Proteus挂接,可以进行单片机应用系统的硬件仿真。 汇编语言编程方法: ①打开“File”菜单→选择新建“New...”→在弹出的文本框(Text1)中编写所需的汇编语言程序→程序写好后,保存(从File→Save As..→选择某目录,文件名.ASM, 存盘); ②打开“Project”菜单→选择新建工程“New Project...”→在弹出的窗口填写:工程名→保存(文件名的后缀是 .uv2 。此时图3的工程窗口中将建立Target1
在使用本软件时,需要对IE作如下设置: 1)需设置工具->Internet属性->浏览历史记录->设置->设置检查所存网页的较新 2)把“格安信息协同工作”网站加入可信任站点:工具->Internet属性->安全->可信站点->站点->加入该站点IP,如图所示: 系统使用流程 1.立项:市场部人员点击导航栏->项目管理->填写立项选项,申请一个新的项目立项,下 面的附件管理可以添加该项目立项所需附件,在确认立项前可以修改相关内容,如图所示:
注意:在填写新的立项时一定要设置状态为“立项”,否则该项目无法进行确认。 2.确认立项:填写完立项后,执行部门的部门经理就可以对项目进行确认了。如果没有问 题,点击导航栏->项目管理->确认立项选项,然后点击提交审批,在审批过程中,可以 3.审批:总经办人员对项目进行审批,点击导航栏->项目管理->立项审批或从首页提示中 直接点击进入,如图所示,同意立项则点击审批按钮。
4.财务审核:财务人员点击导航栏->项目管理->立项财务审核或从首页提示中直接点击进 入,财务人员可以根据项目情况选择下面的修改项目信息对该项目进行修改,该项目无问题后,点击下方“财务审批”按钮进行审核。 5.部门经理制作预算:首先点击导航栏->项目管理->收入预算,对该项目预计收入进行添 加, 注意:此处预算与员工报销时的费用密切相关,必须仔细且与财务名目一致,如果细类不准确,如办公费预算不足了,即使总预算未超,员工也无法进行该项费用报销 然后点击导航栏->项目管理->估算经费,对该项目预计花费进行添加,
最后点击导航栏->项目管理->提交预算审批,对该项目预算进行提交,等待审批。 6.预算审批:预算审批人员对预算进行审批。 7.预算财务审核:财务人员对预算进行审核。 8.指定项目经理:该项目承接部门负责人指定项目经理, 点击导航栏->项目管理->指定项 目经理,选中被批准过的项目,点击选中该项目,在弹出的界面选择下面的添加,指定项目经理及其任职时间。
一.当今流行的电路仿真软件及其特性 电路仿真属于电子设计自动化(EDA)的组成部分。一般把电路仿真分为三个层次:物理级、电路级和系统级。教学中重点运用的为电路级仿真。 电路级仿真分析由元器件构成的电路性能,包括数字电路的逻辑仿真和模拟电路的交直流分析、瞬态分析等。电路级仿真必须有元器件模型库的支持,仿真信号和波形输出代替了实际电路调试中的信号源和示波器。电路仿真主要是检验设计方案在功能方面的正确性。电路仿真技术使设计人员在实际电子系统产生之前,就有可能全面地了解电路的各种特性。目前比较流行的电路仿真软件大体上说有:ORCAD、Protel、Multisim、TINA、ICAP/4、Circuitmaker、Micro-CAP 和Edison等一系列仿真软件。 电路仿真软件的基本特点: ●仿真项目的数量和性能: 仿真项目的多少是电路仿真软件的主要指标。各种电路仿真软件都有的基本功能是:静态工作点分析、瞬态分析、直流扫描和交流小信号分析等4项;可能有的分析是:傅里叶分析、参数分析、温度分析、蒙特卡罗分析、噪声分析、传输函数、直流和交流灵敏度分析、失真度分析、极点和零点分析等。仿真软件如SIMextrix只有6项仿真功能,而Tina6.0有20项,Protel、ORCAD、P-CAD等软件的仿真功能在10项左右。专业化的电路仿真软件有更多的仿真功能。对电子设计和教学的各种需求考虑的比较周到。例如TINA的符号分析、Pspice和ICAP/4的元件参数变量和最优化分析、Multisim的网络分析、CircuitMaker的错误设置等都是比较有特色的功能。 Pspice语言擅长于分析模拟电路,对数字电路的处理不是很有效。对于纯数字电路的分析和仿真,最好采用基于VHDL等硬件描述语言的仿真软件,例如,Altera公司的可编程逻辑器件开发软件MAX+plusII等。 ●仿真元器件的数量和精度: 元件库中仿真元件的数量和精度决定了仿真的适用性和精确度。电路仿真软件的元件库有数千个到1--2万个不等的仿真元件,但软件内含的元件模型总是落后于实际元器件的生产与应用。因此,除了软件本身的器件库之外,器件制造商的网站是元器件模型的重要来源。大量的网络信息也能提供有用的仿真模型。设计者如果对仿真元件模型有比较深入的研究,可根据最新器件的外部特性参数自定义元件模型,构建自己的元件库。对于教学工作者来说,软件内的元件模型库,基本上可以满足常规教学需要,主要问题在于国产元器件与国外元器件的替代,并建立教学中常用的国产元器件库。 电路仿真软件的元件分类方式有两种:按元器件类型如电源、二极管、74系列等分成若干个大类;或按元器件制造商分类,大多数仿真软件有电路图形符号的预览,便于选取使用。
DMI仿真软件操作说明书(doc 11页)
DMI仿真软件使用说明书 DMI仿真软件,让你更快的掌握DMI的使 用,熟悉DMI的功能… 制作小组:21组 组长: 黄鸿珺 20088525 组员: 魏红燕 20088510 王珂麟 20088520 高正乾 20088524
目录
产品说明书 使用须知: 由于该系统完全模拟CTCS功能所以读者需要了解CTCS的功能。CTCS系统描述 CTCS基本功能:在不干扰机车乘务员正常驾驶的前提下有效地保证列车运行安全。 1.安全防护: 在任何情况下防止列车无行车许可运行。防止列车超速运行。包括:列车超过进路允许速度;列车超过线路结构规定的速度;列车超过机车车辆构造速度;列车超过铁力有关运行设备的限速; 防止列车溜逸。 2.人机界面: 为乘务员提供的必须的显示,数据输出及操作装置。能够以字符,数字及图形等方式显示列车运行速度,允许速度,目标速度和目标距离。能够实现给出列车超速,制动,允许缓解等表示以及设备故障状态的报警。 3.检查功能: 具有开机自检和动态检测功能。具有关键动作的记录功能及监测接口。 4.可靠性和安全性: 按照信号故障导向安全原则进行系统设计,采用冗余结构,满足电磁兼容性相关标准。
DMI人机界面 DMI是列控车载设备的显示和操作界面,安装在便于司机操作和观察的位置。相关规定应符合有关标准和技术条件的要求 1.报警功能 人机界面应设有声报警功能,能够及时给出列车超速,切除牵引力,制动,允许缓解或故障状态等的报警和表示。 2.人机界面应有数据功能 输出列车参数有关的信息,输入操作应简明并有清晰的表示。对机车乘务员输入的数据和操作应进行合理性判断。 3.设置位置: 应设置在机车乘务员便于观察及可接近的区域,符合标准化安装尺寸要求。显示部分要便于观察,常用按钮,开关应易于机车乘务员操作。 4.DMI的显示与操作标准统一 文字及语音信息采用中文,用双针速度表,数字,图形显示相结合的方式提供运行速度,允许速度,目标速度和目标距离。 软件设计原理及实现的功能: 根据CTCS系统的功能要求,设计出符合要求的CTCS系统DMI界面的B,D区域,由visual c #2008编写的,制作DMI界面的B,D区,实现列车速度与目标距离的显示情况,以及相关的功能部件的显示。大致有两部分构成,实现两个区域的相互关联。 根据需求分析,运用软件编写符合要求的DMI界面相应区域,实现
专 组号:小组成员: 完成时间:
目录 1.系统概述 (3) 1.1. 系统功能简介 (3) 1.2 系统用户角色 (3) 2.理由 (3) 3.项目范围 (3) 4.系统假设 (3) 5.系统定义 (4) 6.用户场景 (5) 7.用户用例 (5) 7.1 用户用例步骤 (5) 7.2系统需求 (9) 7.2.1 功能需求 (9) 7.2.2 非功能需求 (12) 8.文档历史 (14)
1.系统概述 1.1. 系统功能简介 教务处工作人员根据设置的用户名和密码,登录到学生信息管理系统,并对学生提交的信息修改进行审核,,系统优先级高; 档案管理员添加、查看、删除、修改学生的基本信息, 系统优先级高; 老师查看自己所管班级的学生的信息, 系统优先级高; 学生修改、查看自己的某些信息, 系统优先级高; 1.2 系统用户角色 2.理由 由于现在的学校规模在逐渐的扩大,设置的专业类别、分支机构及老师、学生人数越来越多,对于过去的学生信息管理系统,不能满足当前学生信息管理的服务性能要求。本报告对于开发新的<<学生信息管理系统>>面临的问题及解决方案进行初步的设计与合理的安排,对用户需求进行了全面细致的分析,更清晰的理解学生信息管理系统业务需求,深入描述软件的功能和性能与界面,确定该软件设计的限制和定义软件的其他有效性需求,对开发计划进行了总体的规划确定开发的需求与面临困难的可行性分析。 3.项目范围 学生信息管理系统是典型的信息管理系统,其开发主要包括后台数据库的建立、维护以及前端应用程序的开发两个方面。对于前者要求建立起数据一致性和完整性强、数据安全性好的数据库。而对于后者则要求应用程序具有功能完备,易使用等特点。学生信息管理系统对全校学生实行统一的管理,可以方便的进行增添、查询、修改、删除学生信息的工作。为了使本系统成功达到用户的要求,需要在2012.12.28之前完成本系统的开发测试,并写提交相关的技术文档。通过与用户的沟通,及时获得用户的最新需求以便于本系统的完善。 4.系统假设 本项目的开发时间为2012.9.9—2012.12.28 开发人员人数:3人 技术文档写作人员人数3人
使用方法: 1.本软件无需安装,解压缩后双击S7_200.exe即可使用; 2.仿真前先用STEP 7 - MicroWIN编写程序,编写完成后在菜单栏“文件”里点击“导出”,弹出一个“导出程序块”的对话框,选择存储路径,填写文件名,保存类型的扩展名为awl,之后点保存; 3.打开仿真软件,输入密码“6596”,双击PLC面板选择CPU型号,点击菜单栏的“程序”,点“装载程序”,在弹出的对话框中选择要装载的程序部分和STEP 7 - MicroWIN的版本号,一般情况下选“全部”就行了,之后“确定”,找到awl文件的路径“打开”导出的程序,在弹出的对话框点击“确定”,再点那个绿色的三角运行按钮让PLC进入运行状态,点击下面那一排输入的小开关给PLC 输入信号就可以进行仿真了。 使用教程: 本教程中介绍的是juan luis villanueva设计的英文版S7-200 PLC 仿真软件(V2.0),原版为西班牙语。关于本软件的详细介绍,可以参考 https://www.doczj.com/doc/b21105373.html,/canalPLC。 该仿真软件可以仿真大量的S7-200指令(支持常用的位触点指令、定时器指令、计数器指令、比较指令、逻辑运算指令和大部分的数学运算指令等,但部分指令如顺序控制指令、循环指令、高速计数器指令和通讯指令等尚无法支持,仿真软件支持的仿真指令可参考 https://www.doczj.com/doc/b21105373.html,/canalPLC/interest.htm)。仿真程序提供了数字信号输入开关、两个模拟电位器和LED输出显示,仿真程序同时还支持对TD-200文本显示器的仿真,在实验条件尚不具备的情况下,完全可以作为学习S7-200的一个辅助工具。 仿真软件界面介绍:
3DMS监控平台软件使用说明书 版本:4.23 深圳市亚美达通讯设备有限公司
目录 1、系统登录 (3) 2、主界面 (4) 2.1标题栏 (4) 2.2菜单栏 (4) 2.3工具栏 (4) 2.4状态栏 (4) 2.5树形区 (4) 2.6地图区 (5) 2.7简明信息区 (6) 2.8报警区 (6) 3、监控站点界面 (7) 3.1组态图形 (7) 3.2数据列表 (8) 3.3单灯 (8) 3.4监控点资料 (9) 4、配电箱端的远程操作 (10) 4.1遥测数据 (11) 4.2设置自动开关灯时间 (11) 4.3手动开关灯 (12) 4.4校准时钟 (13) 4.5设置采集器参数 (13) 5、单灯监控 (14) 5.1报警信息 (14) 5.2监测数据 (14) 5.3单灯手动开关灯控制 (15) 5.4单灯配置管理 (15) 6、报表 (17) 6.1监控数据 (17) 6.2故障记录 (17) 6.3监控点数据 (18) 6.4操作记录 (18) 7、数据配置 (19) 7.1监控点管理 (19) 7.2设备管理 (19) 7.3监控项管理 (20) 7.4人员管理 (20) 7.5字典管理 (21) 7.6时间表管理 (21) 8、常见问题 (22)
1、系统登录 启动客户端软件(3DMS.exe),出现登录界面,输入正确的用户名和登录密码,点击登录按钮即可进入监控软件。
2、主界面 主界面采用Windows标准风格,分为: 2.1标题栏:上方第一行,包括软件名称、Windows标准缩放按钮。 2.2菜单栏:上方第二行,为软件功能的菜单。 2.3工具栏:上方第三行,软件常用功能的快捷方式图标。 2.4状态栏:最下方一行,显示服务器连接状态和登录用户信息。 2.5树形区:左侧,按层次显示所有监控站点,可在监控站点名称上单击右键弹出菜单,执行常用功能,亦可在监控站点名称上双击左
PLC是“Programmable Logic Controller(可编程序逻辑控制器)”的英文缩写,是采用微电脑技术制造的自动控制设备。它以顺序控制为主,回路调节为辅,能完成逻辑判断、定时、记忆和算术运算等功能。与传统的继电器控制相比,PLC控制具有控制速度快、可靠性高、灵活性强、硬件接线简单、改变工艺方便等优点。 PLC的基本构成见图1-1,简要说明如下: 1. 中央处理器CPU 起运算控制作用,指挥协调整机运行。 2. 存储器ROM RAM 存放程序和数据 (1) 系统程序存储器ROM 存放生产厂家写入的系统程序,用户不可更改。 (2) 随机读写存储器RAM 存放随机变化的数据。 (3) 用户程序存储器EPROM或E2 PROM 存放用户编写的用户程序。 3. 通信接口与计算机、编程器等设备通信,实现程序读写、监控、联网等功能。 4. 电源利用开关电源将AC220V转变成DC5V供给芯片;DC12V供给输出继电器; DC24V供给输入端传感器。另有锂电池做为备份电源。 5. 输入接口IN 将外部开关或传感器的信号传递给PLC。 6. 输出接口OUT 将PLC的控制信号输出到接触器、电磁阀线圈等外部执行部件。作为一般技术人员,对于上述构成,主要关心的是输入输出接口。输入输出接口的详细情况,见第9页§3.2的有关介绍和图2-3 PLC输入输出接口电路示意图。
随着PLC技术的发展,其功能越来越多,集成度越来越高,网络功能越来越强,PLC与PC 机联网形成的PLC及其网络技术广泛地应用到工业自动化控制之中,PLC集三电与一体,具有良好的控制精度和高可靠性,使得PLC成为现代工业自动化的支柱。 PLC的生产厂家和型号、种类繁多,不同型号自成体系,有不同的程序语言和使用方法,但是编程指导思想和模式是相同的,其编程和调试步骤如下: 1. 设计I/O接线图 根据现场输入条件和程序运行结果等生产工艺要求,设计PLC的外围元件接线图,作为现场接线的依据,也作为PLC程序设计的重要依据。(I/O接线图参见9页图2-3) 2. 编制PLC的梯形图和指令语句表 根据生产工艺要求在计算机上利用专用编程软件编制PLC的梯形图,并转换成指令语句表(FX系列PLC编程常用指令见13页表2-2)。 3. 程序写出与联机调试 用编程电缆连接计算机和PLC主机,执行“写出”操作,将指令语句表写出到PLC主机。PLC 输入端连接信号开关,输出端连接执行部件,暂不连接主回路负载,进行联机调。 PLC的控制方式是由继电器控制方式演化而来,由PLC内部的微电子电路构成的模拟线圈和触点取代了继电器的线圈和触点,用PLC 的程序指令取代继电器控制的连接导线,将各个元件按照一定的逻辑关系连接起来,PLC控制的梯形图在许多方面可以看作是继电器控制的电路图。 可以理解为,PLC内部有大量的由软件程序构成的继电器、计时器和计数器等软元件,用软件程序按照一定的规则将它们连接起来,取代继电控制电路中的控制回路。 本文第一章介绍利用PLC计算机仿真软件,学习PLC用户程序设计,并且仿真试运行、调试程序。由于仿真软件不需要真正的PLC主机,就可以在计算机上仿真运行调试,所以它既是学习PLC程序设计的得力助手,也给实际工作中调试程序带来很大方便。本章的编程仿真练习题,请读者认真完成,会对掌握PLC应用大有帮助。 本文第二章介绍PLC实际应用的编程软件的使用方法。 §2 PLC计算机仿真软件 FX系列PLC可用“FX-TRN-BEG-C”仿真软件,进行仿真运行。该软件既能够编制梯形图程序,也能够将梯形图程序转换成指令语句表程序,模拟写出到PLC主机,并模拟仿真PLC控制现场机械设备运行。 使用“FX-TRN-BEG-C”仿真软件,须将显示器象素调整为1024*768,如果显示器象素较低,则无法运行该软件。 §2.1 仿真软件界面和使用方法介绍 启动“FX-TRN-BEG-C”仿真软件,进入仿真软件首页。软件的A-1、A-2两个章节,介绍PLC 的基础知识,此处从略,请读者自行学习。从A-3开始,以后的章节可以进行编程和仿真培训练习,界面显示如图2-1所示。
传感器仿真软件使用说明 书 The Standardization Office was revised on the afternoon of December 13, 2020
THSRZ-2型传感器系统综合实验装置仿真软件使用说明书THSRZ-2型传感器系统综合实验装置仿真软件 ................. 错误!未定义书签。 实验一属箔式应变片――单臂电桥性能实验。 ................. 错误!未定义书签。 实验二金属箔式应变片――半桥性能实验 ......................... 错误!未定义书签。 实验三金属箔式应变片――全桥性能实验 ......................... 错误!未定义书签。 实验四直流全桥的应用――电子秤实验 ............................. 错误!未定义书签。 实验五交流全桥的应用――振动测量实验 ......................... 错误!未定义书签。 实验六扩散硅压阻压力传感器差压测量实验 ..................... 错误!未定义书签。 实验七差动变压器的性能实验 ............................................. 错误!未定义书签。 实验八动变压器零点残余电压补偿实验 ............................. 错误!未定义书签。 实验九励频率对差动变压器特性的影响实验 ..................... 错误!未定义书签。 实验十差动变压器的应用――振动测量实验 ..................... 错误!未定义书签。 实验十一电容式传感器的位移特性实验 ............................. 错误!未定义书签。 实验十二容传感器动态特性实验 ......................................... 错误!未定义书签。 实验十三直流激励时霍尔式传感器的位移特性实验 ......... 错误!未定义书签。 实验十四流激励时霍尔式传感器的位移特性实验 ............. 错误!未定义书签。 实验十五霍尔测速实验 ......................................................... 错误!未定义书签。 实验十六霍尔式传感器振动测量实验 ................................. 错误!未定义书签。 实验十七磁电式转速传感器的测速实验 ............................. 错误!未定义书签。 实验十八压电式传感器振动实验 ......................................... 错误!未定义书签。 实验十九电涡流传感器的位移特性实验 ............................. 错误!未定义书签。 实验二十被测体材质、面积大小对电涡流传感器的特性影响实验错误!未定义书签。 实验二十一电涡流传感器测量振动实验 ............................. 错误!未定义书签。 实验二十二光纤传感器的位移特性实验 ............................. 错误!未定义书签。 实验二十三光纤传感器的测速实验 ..................................... 错误!未定义书签。 实验二十四光纤传感器测量振动实验 ................................. 错误!未定义书签。 实验二十五光电转速传感器的转速测量实验 ..................... 错误!未定义书签。 实验二十六 PT100温度控制实验 .......................................... 错误!未定义书签。 实验二十七集成温度传感器的温度特性实验 ..................... 错误!未定义书签。 实验二十八铂电阻温度特性实验 ......................................... 错误!未定义书签。 实验二十九热电偶测温实验 ................................................. 错误!未定义书签。 实验三十 E型热电偶测温实验 .......................................... 错误!未定义书签。 实验三十一热电偶冷端温度补偿实验 ................................. 错误!未定义书签。 实验三十二气敏传感器实验 ................................................. 错误!未定义书签。 实验三十三湿敏传感器实验 ................................................. 错误!未定义书签。 实验三十四转速控制实验 ..................................................... 错误!未定义书签。
怎样利用电路仿真软件进行模拟电路课程的学习电路分析实验报告 实验二 学习用multisim软件对电路进行仿真 一.实验要求与目的 1.进一步熟悉multisim软件的各种功能。 2.巩固学习用multisim软件画电路图。 3.学会使用multisim里面的各种仪器分析模拟电路。 4.用multisim软件对电路进行仿真。 二、实验仪器 电脑一台及其仿真软件。 三.实验内容及步骤
(1)在电子仿真软件Multisim 基本界面的电子平台上组建如图所示的仿真电路。双击电位器图标,将弹出的对话框的“Valve”选项卡的“Increment”栏改成“1”,将“Label”选项卡的“RefDes”栏改成“RP。 ” 2)调节RP大约在35%左右时,利用直流工作点分析方法分析直 流工作点的值。直流工作点分析(DC Operating Point Analysis)是用来分析和计算电路静态工作点的,进行分析时,Multisim 自动将电路分析条件设为电感、交流电压源短路,电容断开。 单击Multisim 菜单“Simulate/Analyses/DC operating Point…”,在弹出的对话框中选择待分析的电路节点,如2图所示。单击Simulate 按钮进行直流工作点分析。分析结果如图3所示。列出了
单级阻容耦合放大电路各节点对地电压数据,根据各节点对地电压数据,可容易计算出直流工作点的值,依据分析结果,将测试结果填入表1中,比较理论估算与仿真分析结果。 表1 静态工作点数据 电压放大倍数测试 (1)关闭仿真开关,从电子仿真软件Multisim 10基本界面虚拟仪器工具条中,调出虚拟函数信号发生器和虚拟双踪示波器,将虚拟函数信号发生器接到电路输入端,将虚拟示波器两个通道分别接到电路的输入端和输出端,如图4所示。 (2)开启仿真开关,双击虚拟函数信号发生器图标“XFG1”,将打开虚拟函数信号发生器放大面板,首确认“Waveforms”栏下选取的是正弦信号,然后再确认频率为1kHZ”;再确认幅度为 10mVp,如图5所示。 四.仿真分析 动态测量仿真电路
Machining数控仿真软件简明使用手册视频教程下载:软件基本操作: 机床视图右键菜单介绍: A.XOZ平面:改变机床视图视角 B.YOZ平面:改变机床视图视角 C.XOY平面:改变机床视图视角 D.隐藏/显示床身: 在机床视图中点右键,选择“隐藏床身”或者“显示床身” E.快速定位: 让主轴移动到工件中心位置。 F.开关机舱门 3D机床模型操作: A.鼠标左键旋转 B.鼠标滚轮放大或缩小 C.按下鼠标中键平移 提示窗口: 软件菜单介绍 A.加工时间 估算加工程序所需时间
B.文件 1.导入:导入一个加工程序,但必须在E DIT模式下打开或者新建了一个程序的情况下才能导入2?保存工件:保存已加工工件 3.读入工件:打开保存的工件 C.设置 1.显示刀具轨迹 选中后会在自动加工中显示加工轨迹。 2.显示床身 选中该选项将显示床身。 3.机床声音 选中该选项将启用声音效果。 4.模型阴影 选中该选项将启用阴影效果,但是一些比较老的显卡运行速度会下降。如果速度慢请取消该选项。 D.视图 视图:当面板视图被关闭后,用该菜单将面板重新打开。 双屏显示:分别在两个显示器中显示面板和机床模型。 E.切换面板 各系统间进行切换操作。 F.设置工件 选择工件类型,工件类型为:长方体和圆柱体。 设置工件的显示精度,精度有3级: 1.性能:工件精度较低 2.平衡:工件精度中等 3.质量:工件精度较高 请根据显卡能力选择适当的精度,较高的精度资源占用高。 G.检查更新 检查是否有新版本,该功能需要联网。 H.帮助文档
2.刀具选择 1.新建刀具: 添加刀具:按“Add按钮添加新的刀具,然后在自定义刀具对话框中输入直径和长度2.编辑刀具: 双击“ Tool Select "中列表中的条目进行刀具参数编辑。 3.删除刀具: 按“ Delete ”按钮删除所选刀具。 4 .选择刀具: 鼠标移动到右边刀具栏,出现"select tool" 对话框,在里面选择所需的刀具。再点击“ Tool Number”下拉菜单,选择所需的刀号。点击“ OK确认。 将刀具移动到刀具库上,单击鼠标左键,刀具装入。将鼠标移动至刀位可以查看刀号。 3.数控面板操作 FANUC 0iM 操作控制面板急停按钮 电源开 电源关 循环启动 循环停止 自动模式编辑模式手动输入模式步进模式 手轮模式回参考点手动模式
变电所联网监控系统使用说明书 **发展有限公司 2013.04.01
目录 第一部分设计说明______________________________________ 2一系统概况____________________________________________ 2二系统网络结构________________________________________ 2 三、监控内容及方式_____________________________________ 3 3.1 联网变电所_________________________________________ 3 3.2 监控内容___________________________________________ 4 四、使用环境___________________________________________ 4 五、设计依据___________________________________________ 5第二部分系统功能介绍__________________________________ 6 2.1 主菜单_____________________________________________ 8 2.2 历史曲线__________________________________________ 11 2.3 报警查询__________________________________________ 12 2.4 操作查询__________________________________________ 13 2.5 报表查询__________________________________________ 14 2.6 系统说明__________________________________________ 15 2.7 报警确认__________________________________________ 15第三部分系统故障及维护_______________________________ 16 3.1 系统故障处理______________________________________ 16 3.2 使用注意__________________________________________ 16
项目一:焊接机器人 1.打开Robot studio软件,单击创建新建空工作站,同时保存一下,如下图所示; 2.选择ABB机器人模型IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下图所示: 3.导入设备-tools-Binzel air 22,并拖动安装在机器人法兰盘上: 4.选择建模-固体-矩形体,设定长宽高,点击创建: 5.选择基本-机器人系统-从布局创建系统-下一步-下一步-完成; 6.控制器启动完成后,选择路径-创建一个空路径, 创建成功后,修改下方参数:moveJ , V1000,Z100 8.激活当前路径,选择机器人起点,单击示教指令 9.开启捕捉末端或角点,同时将机器人的移动模式设为手动线性,将机器人工具移到矩形体的一个角点上,单击示教指令,形成第一条路径,依次示教四个角点,形成路径,右击路径,选择查看机器人目标,可将机器人移动到当前位置 10.路径制作完成后,选择基本-同步到VC,在弹出的对话框中全部勾选,并点击确定,同步完成后选择仿真-仿真设定-将路径添加到主队列,选择应用--确定; 11.选择仿真录像,点击播放,开始仿真录像。 项目二:搬运机器人 1.新建空工作站--导入机器人IRB4600--选择最大承重能力,选择建模-固体-圆柱体,添加两个圆柱体,半径为200mm,高度分别为60mm和500mm,把其中一个作为工具添加到法兰盘上,同时导入两个设备Euro pallet如下图所示: 2.右击物体或在左侧布局窗口中右击物体名称,在下拉菜单中选择设定颜色来更改颜色: 3.根据布局创建机器人系统,细节与项目一相同,系统完全启动后,选择控制器-配置编辑器,在下拉菜单中选择I/O,在弹出窗口中新建Unit,细节如下图所示; 4.Unit新建完毕后,右击新建signal,新建do1和do2,细节如下图所示: 5.新建完毕后,重启控制器 6.重启完毕后,选择仿真-配置-事件管理器-添加事件,细节如下图所示: 7.事件添加完成后,开始创建路径啊,依次示教,机器人到达指定位置时,右击插入逻辑指令,如图所示: 8.路径创建完成后,同步到VC,仿真设定,然后进行仿真录像 项目三:叉车搬运 1.打开软件,新建空工作站,导入机器人模型IRB4600,选择最大承重能力,然后选择基本--导入几何体--浏览几何体--选择本地几何体--打开,如下图所示: 2.利用平移和旋转指令,将不同几何体按下图位置摆放整齐: 3.创建一个300*300*70的方体分别作为tool,将其创建为工具,具体操作如下图所示: 4.设定tool的本地原点为它的中心点,如下图所示: 5.选中tool,点击创建工具,将tool创建为工具,具体操作如下: 6.创建完成后将其安装在机器人法兰盘上,右击机器人选择显示机器人工作范围,可看到机器人最大到达距离,再次选择取消显示: 4.创建四个200*200*200的方体分别作为Box1~Box4,设定为不同颜色,将Box2~Box4设为不可见 5.布局结束,如下图所示:, 6.根据布局创建机器人系统,待系统启动完毕后,选择控制器--配置编辑器-新建Unit --新建signal,包括do1~do 15,如下图所示: 7.设置完成后,重启控制器,打开事件管理器,添加所需事件,包括显示对象,附加对象,提取对象,移动对象四类事件,具体如下: