1
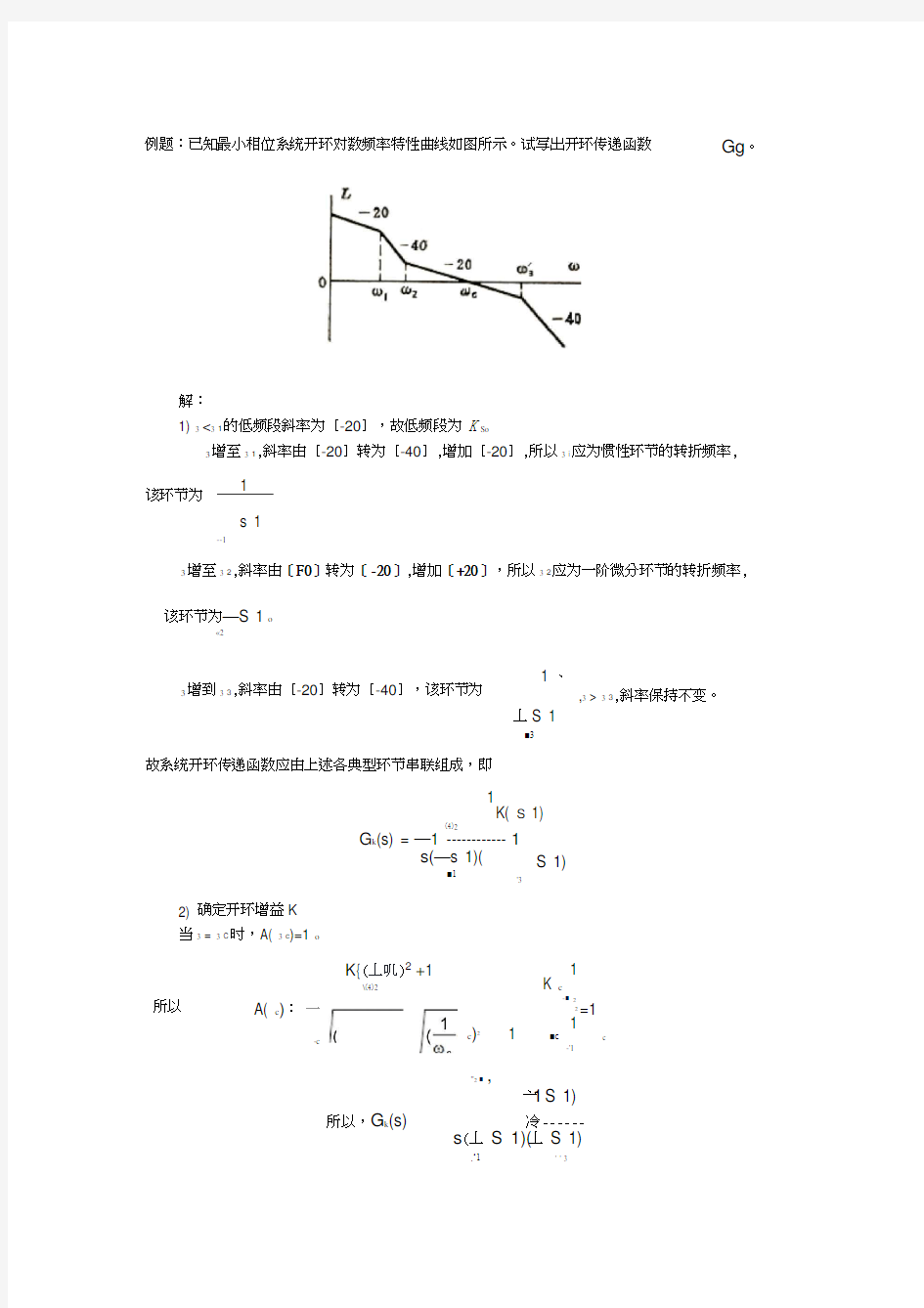
例题:已知最小相位系统开环对数频率特性曲线如图所示。试写出开环传递函数
''2 ■
,
亠 S 1)
所以,G k (s)
冷 ------
s (丄 S 1)(丄 S 1)
.‘1
' ' 3
Gg 。
解:
1) 3 <3 1的低频段斜率为[-20],故低频段为 K So
3增至3 1,斜率由[-20]转为[-40],增加[-20],所以3 i 应为惯性环节的转折频率,
该环节为
1 s 1
--1
3增至3 2,斜率由[F0]转为[-20],增加[+20],所以3 2应为一阶微分环节的转折频率,
该环节为—S 1 o
?2
3增到3 3,斜率由[-20]转为[-40],该环节为
1 、
,3 > 3 3,斜率保持不变。
丄S 1
■3
故系统开环传递函数应由上述各典型环节串联组成,即
1
K( S 1)
⑷2
G k (s) = —1 ------------ 1
s(—s 1)( ■1
S 1)
'3
2) 当
确定开环增益K
3 = 3 C 时,A( 3 c )=1 o 所以
A( c ): 一
-c
K {(丄叽)2 +1
\⑷2
1 K c
-■ 2 2
=1
1
■c c
-'1
c )2
1
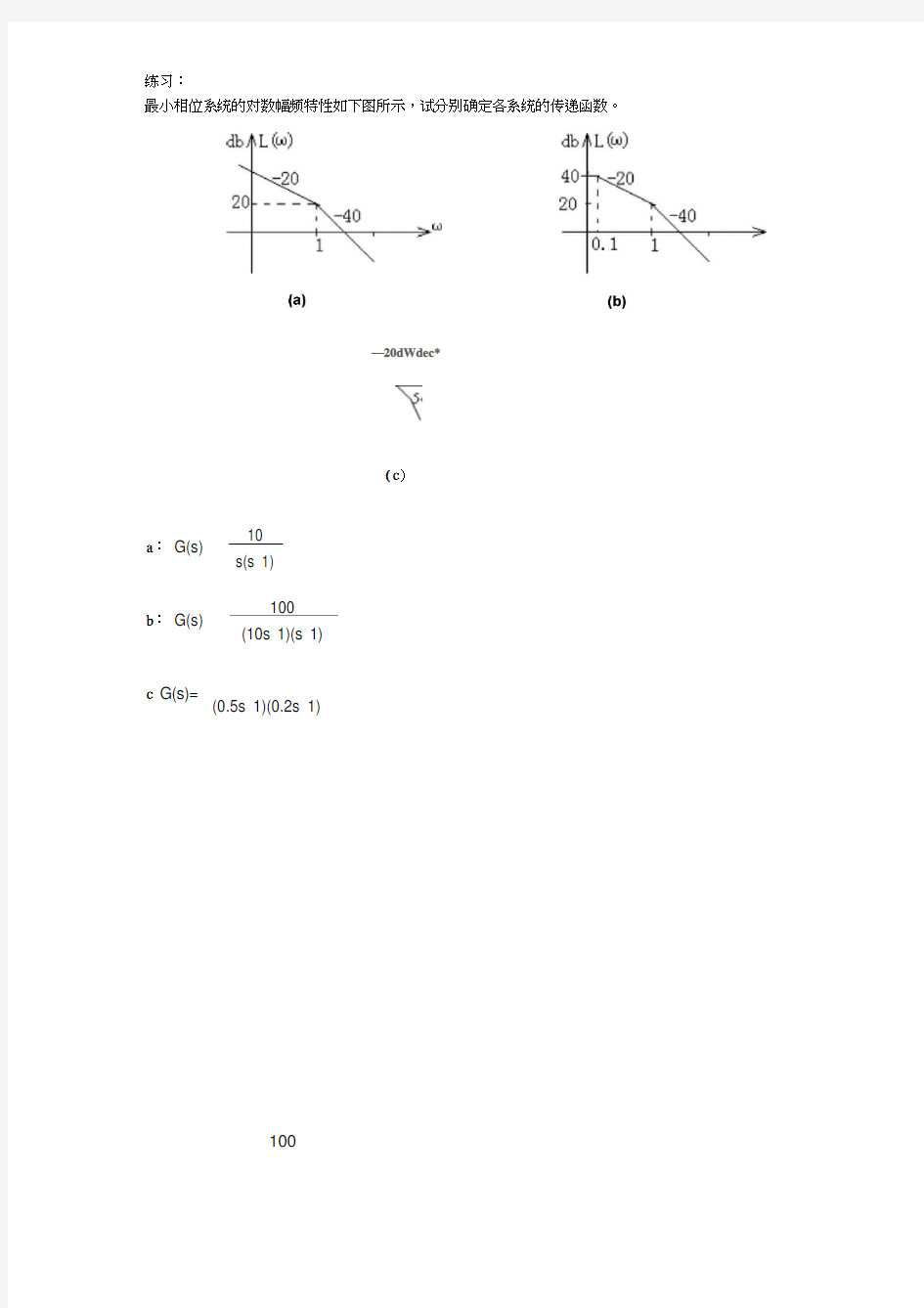
练习:
最小相位系统的对数幅频特性如下图所示,试分别确定各系统的传递函数。
—20dWdec*
(c)
a:G(s)
b:G(s)
c G(s)=
10
s(s 1)
100
(10s 1)(s 1)
(0.5s 1)(0.2s 1)
100
关于一阶二阶传递函数的伯德图 一阶惯性系统的通式为: 将式子两边同时除以a0得 令0 0a K b =为系统静态灵敏度; 0 1a a =τ为系统时间常数; 则有 )()()1( s KX s Y s =+τ 故有 ) 1()()()(+==s K s X s Y s H τ 以液柱式温度计为例,传递函数为 )1(1)()()(+==s s X s Y s H τ 可得频率响应函数 )1j (1)(+= τωs H )()()(001t x b t y a dt t dy a =+)()()(0001t x a b t y dt t dy a a =+
可得传递函数的幅频与相频特性 2)1(1 )()(τωωω+==j H A ωτωω?arctan )()(-=∠=j H 在MATLAB 上输入程序(此时令1=τ) num=[1]; den=[1,1]; figure sys=tf(num,den); bode(sys);grid on 可得bode 图
二阶惯性系统的通式为: 将式子两边同时除以a 0得 令0 0a K b =为系统静态灵敏度; 20n a a = ω为系统无阻尼固有频率; 1 012a a a =ξ为系统阻尼器 传递函数为 12) ()()(22++==n n s s K s X s Y s H ωξω 可得传递函数的幅频与相频特性 2222)(4)1(1 )()(2n n K j H A ωωξωωωω+-== )()()()(001222t x b t y a dt t dy a dt t y d a =++)()()()(00012202t x a b t y dt t dy a a dt t y d a a =++
一、求下图所示系统的传递函数)(/)(0s U s U i 。 (10分) ) 1()()(3132320+++-=CS R R R R CS R R s U s U i 一、控制系统方块图如图所示: (1)当a =0时,求系统的阻尼比ξ,无阻尼自振频率n ω和单位斜坡函数输入时的稳态误差; (2)当ξ=时,试确定系统中的a 值和单位斜坡函数输入时系统的稳态误差; 系统的开环传函为 s a s s G )82(8)(2++=闭环传函为8)82(8)()(2+++=s a s s R s Y 25.0 83.2 36.0===ss n e ωξ 4 25.0==ss e a 设某控制系统的开环传递函数为 ) 22()(2++=s s s k s G 试绘制参量k 由0变至∞时的根轨迹图,并求开环增益临界值。 (15分) 1)j p j p p --=+-==110 321 2)πππ?σ3 5,,332=-=a a (10分) 3)ω=j 2±,c k =4,开环增益临界值为K=2 设某系统的特征方程为23)(234+--+=s s s s s D ,试求该系统的特征根。 列劳斯表如下 0000220112311 2 3 4 s s s s --- (4分) 得 辅助方程为0222=+-s ,解得1,121-==s s (4分)
最后得1,243=-=s s 设某控制系统的开环传递函数为 )()(s H s G =) 10016()12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值 剪切频率为s rad c /75.0=ω 某系统的结构图和Nyquist 图如图(a)和(b)所示,图中 2)1(1)(+=s s s G 23 ) 1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。 (16分) 解:由系统方框图求得内环传递函数为: s s s s s s s H s G s G +++++=+23452 474)1()()(1)( (3分) 内环的特征方程:04742345=++++s s s s s (1 分) 由Routh 稳定判据: 01: 03 10 :16 :044: 171: 01234s s s s s 七、设某二阶非线性系统方框图如图所示,其中 4 , 2.0 , 2.00===K M e 及s T 1=, 试画出输入信号)(12)(t t r ?=时系统相轨迹的大致图形,设系统原处于静止状态。 (16分) 解:根据饱和非线性特性,相平面可分成三个区域,运动方程分别为
Matlab中Bode图的绘制技巧 我们经常会遇到使用Matlab画伯德图的情况,可能我们我们都知道bode这个函数是用来画bode图的,这个函数是Matlab内部提供的一个函数,我们可以很方便的用它来画伯德图,但是对于初学者来说,可能用起来就没有那么方便了。 譬如我们要画出下面这个传递函数的伯德图: 1.576e010 s^2 H(s= ------------------------------------------------------------------------------------------ s^4 + 1.775e005 s^3 + 1.579e010 s^2 + 2.804e012 s + 2.494e014 (这是一个用butter函数产生的2阶的,频率范围为[20 20K]HZ的带通滤波器。 我们可以用下面的语句: num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den; bode(H 这样,我们就可以得到以下的伯德图: 可能我们会对这个图很不满意,第一,它的横坐标是rad/s,而我们一般希望横坐标是HZ;第二,横坐标的范围让我们看起来很不爽;第三,网格没有打开(这点当然我们可以通过在后面加上grid on解决)。 下面,我们来看看如何定制我们自己的伯德图风格: 在命令窗口中输入:bodeoptions
我们可以看到以下内容:ans = Title: [1x1 struct] XLabel: [1x1 struct] YLabel: [1x1 struct] TickLabel: [1x1 struct] Grid: 'off' XLim: {[1 10]} XLimMode: {'auto'} YLim: {[1 10]} YLimMode: {'auto'} IOGrouping: 'none' InputLabels: [1x1 struct] OutputLabels: [1x1 struct] InputVisible: {'on'} OutputVisible: {'on'} FreqUnits: 'rad/sec' FreqScale: 'log' MagUnits: 'dB' MagScale: 'linear' MagVisible: 'on' MagLowerLimMode: 'auto' MagLowerLim: 0 PhaseUnits: 'deg' PhaseVisible: 'on' PhaseWrapping: 'off'
控制系统的开环频率特性 目的:掌握开环Bode 图的绘制 根据Bode 图确定最小相位系统的传递函数 重点:开环Bode 图的绘制、根据Bode 图确定最小相位系统的传递函数 1 开环伯德图手工作图的一般步骤: 1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率 2)求20lgK 的值,并明确积分环节的个数ν 3)通过(1,20lgK )绘制斜率为-20vdB/dec 低频段 4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率 最小相位系统定义: 递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。否则就是非最小相位系统。 对数幅频特性与相频特性之间存在确定的对应关系。对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。 非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。对响应要求快的系统,不宜采用非最小相位元件。 2 典型环节的伯德图 绘制曲线在MA TLAB 中实现,利用下述的程序段: num=[b2 b1 b0]; den=[1 a2 a1 a0]; H=tf(num,den); bode(H) margin(H) hold on 2.1 比例环节 传递函数:()G s K = 频率特性:()G j K ω= 对数幅频特性:()20lg L j K ω= 对数相频特性:()0?ω= 程序段: num=[0 10]; den=[0 1]; H=tf(num,den); bode(H) margin(H) hold on 结论:放大环节的对数幅频特性是一条幅值为20lgK 分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。 K>1时,20lgK>0dB ;K<1时,20lgK<0dB 。 2.2 惯性环节(低通滤波特性) 传递函数:1()1G s s τ= + 频率特性:()()()j G j A e ?ωωω= 对数幅频特性:2 1()20lg 1() L ωτω=+ 对数相频特性:()arctan ?ωτω=- 绘制1()10.1G s s =+的Bode 图 程序段: num=[0 1]; den=[0.1 1];H=tf(num,den); bode(H) margin(H) hold on 结论:惯性环节的对数幅频特性可以用在1ωτ= 处相交于0分贝的两条渐近直线来近似表示:当1ωτ 时,是一条0分贝的直线; 当1ωτ 时,是一条斜率为-20dB/dec 的直线。 惯性环节具有低通特性,对低频输入能精确地复现,而对高频输入要衰减,且产生相位迟后。因此,它只能复现定常或缓慢变化的信号。 2.3 积分环节 传递函数:1 ()G s s τ= 频率特性:()()()j G j A e ?ωωω= 对数幅频特性:1 ()20lg L j ωτω = 对数相频特性:()2 π?ω=- 在同一坐标中绘制1()G s s = 、1()0.1G s s = 和 1()0.01G s s = 的Bode 图 num1=[0 1];den1=[1 1];H1=tf(num1,den1); bode(H1)margin(H1)hold on
一、求下图所示系统的传递函数 ) (/)(0s U s U i 。 (10分) ) 1()()(313 2320+++-=CS R R R R CS R R s U s U i 一、控制系统方块图如图所示: (1)当a =0时,求系统的阻尼比ξ,无阻尼自振频率n ω和单位斜坡函数输入时的稳态误差; (2)当ξ=0.7时,试确定系统中的a 值和单位斜坡函数输入时系统的稳态误差; 系统的开环传函为 s a s s G )82(8)(2++= 闭环传函为8)82(8 )()(2 +++=s a s s R s Y 25.0 83.2 36.0===ss n e ωξ 4 25.0==ss e a 设某控制系统的开环传递函数为 ) 22()(2 ++= s s s k s G 试绘制参量k 由0变至∞时的根轨迹图,并求开环增益临界值。 (15分) 1)j p j p p --=+-==110321 2) πππ?σ3 5 ,,332=- =a a (10分) 3)ω=j 2±,c k =4,开环增益临界值为K=2 设某系统的特征方程为23)(2 3 4 +--+=s s s s s D ,试求该系统的特征根。 列劳斯表如下 022******* 2 34 s s s s ---
得辅 助 方 程 为 222=+-s ,解得 1,121-==s s (4分) 最后得1, 243=-=s s 设某控制系统的开环传递函数为 )()(s H s G = ) 10016() 12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值 剪切频率为s rad c /75.0=ω 某系统的结构图和Nyquist 图如图(a)和(b)所示,图中 2)1(1)(+=s s s G 2 3 ) 1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。 (16分) 解:由系统方框图求得内环传递函数为: s s s s s s s H s G s G +++++= +23452 474)1()()(1)(
6-1试求图示有源网络的传递甫数和Bode 图,并说明其网络特性。 6-2已知单位反馈控制系统的开环传递函数为 G(f)二 10 5(0.25 +1) 当串联校正装置的传递函数G c ($)如下所示时: (1) G c (5)= 0.2s +1 0.05s +1 2($ +1) (10s+ 1) 1?试绘出两种校正时校正前和校正后系统Bode 图; 2.试比较两种校正方案的优缺点。 6-3已知单位反馈系统的对数幅频特性Illi 线如图屮厶)@), 串联校正装置G c (s)的对 数幅频特性如图中&9),要求: 1. 在图小画出系统校止后的对数幅频特性厶(e); 2. 写出校正后系统的开环传递函数; 3. 分析校止装置G c (5)对系统的作用。 6-4系统的结构图如图所示,试利用根轨迹法设计超前校止装置,使系统满足下列性 能指标:=0.7 , t s =1.45, K v = 。 6—5已知一单位反馈系统的开环传递函数为 习题6— 1图
试设计一?校正装置,使系统的相角裕量厂> 45° ,剪切频率0. > 50$ j 0 6-6单位反馈系统的开环传递函数为 设计一串联滞后校正装置,使系统相角裕量/ > 40° ,并保持原有的开环增益。 6-7设单位反馈系统的开环传递函数为 G(s)= --------------- ------------ 5(0.15 + 1)(0.255 + 1) 试设计--校正装置,使系统满足下列性能指标,速度误差系数K,, 相角裕量 / > 40° ,剪切频率 > 0.5s~} o 6-8单位反馈系统的开环传递函数为 若耍求校正后系统的谐振峰值=1.4,谐振频率> lor 1,试确定校正装置的形 式与参数。 6-9单位反馈系统的结构如图所示,现用速度反馈来校正系统,校正后系统具有临界 G(s) = 200 5(0.15 + 1) G() = 4 s(2s +1) G(s)= 10 5(0.255 +1)(0.055 +1) 习题6 —3图
使用MATLAB 绘制频率特性曲线 姓名 黄勇 班级 16电气本三 学号 4702160186 一、频率特性 在定义谐波输入下,输出响应中与输入同频率的谐波分量与谐波输入的幅值之比A(ω)为幅频特性,相位之差)(ω?为相频特性,并称其指数表达形式: ()()()j G j A e ?ω ωω= 为系统的频率特性。 总结上述我们可知:频率特性由两个部分组合而成,分别是幅频特性和相频特性。稳态系统的输出信号与输入信号的相位之差我们称其为相频特性。稳态系统输出与输入的幅值之比称为幅频特性。另外频率响应对稳定系统和不稳定系统都适应,其中稳定系统的频率特性可以通过实验的方法确定。 二、频率特性的几何表示法 ? 幅相频率特性曲线 简称幅相特性曲线,或幅相特性,或极坐标图。 ? 对数频率特性曲线 又称为伯德曲线或伯德图。 ? 对数幅相曲线 又称为尼科尔斯曲线或尼科尔斯图。 三、惯性环节频率特性的绘制 惯性环节的表达式为: () 1 1G s Ts = + T 的取值分别为2、4、7,使用MATLAB 软件绘制
MATLABA的函数指令如下: 指令说明:num为分子指令;den为分母指令;此次画图调用了伯德图画法(bode指令)。绘制图如下:
T=2时。 MATLABA的函数指令如下: 绘制图如下: 同理当T=4时。MATLABA的函数指令如下:
绘制图如下: 四、振荡环节频率特性的绘制 振荡环节的传递函数为: ()22 1=21 n n G s s s ζωω+ +
在 2 01取值,本次取值分别为0.1 0.3 0.5 0.707 0.85 0.91 1。 方法一:使用伯德图画MATLAB函数程序指令如下: MATLAB图形显示如下:
习 题 6-1 试求图示有源网络的传递函数和Bode 图,并说明其网络特性。 6—2 已知单位反馈控制系统的开环传递函数为 ) 12.0(10)(+=s s s G 当串联校正装置的传递函数)(s G c 如下所示时: (1)1 05.012.0)(++=s s s G c (2))110()1(2)(++=s s s G c 1.试绘出两种校正时校正前和校正后系统Bode 图; 2 6—3 已知单位反馈系统的对数幅频特性曲线如图中)(0ωL ,串联校正装置)(s G c 的对数幅频特性如图中)(ωc L ,要求: 1.在图中画出系统校正后的对数幅频特性)(ωL ; 2 3.分析校正装置)(s G c 对系统的作用。 6—4系统的结构图如图所示,试利用根轨迹法设计超前校正装置,使系统满足下列性 能指标7.0=ζ,s t s 4.1=,12-=s K v 。 6—5 已知一单位反馈系统的开环传递函数为
) 11.0(200)(+= s s s G 试设计一校正装置,使系统的相角裕量?≥45γ,剪切频率150-≥s c ω。 6—6 单位反馈系统的开环传递函数为 ) 12(4)(+=s s s G c 设计一串联滞后校正装置,使系统相角裕量?≥40γ,并保持原有的开环增益。 6—7 设单位反馈系统的开环传递函数为 ) 125.0)(11.0(5)(++=s s s s G 试设计一校正装置,使系统满足下列性能指标,速度误差系数15-=s K v ,相角裕量 ?≥40γ,剪切频率15.0-≥s c ω。 6—8 单位反馈系统的开环传递函数为 ) 105.0)(125.0(10)(++=s s s s G 若要求校正后系统的谐振峰值4.1=r M ,谐振频率110-≥s r ω,试确定校正装置的形 式与参数。 6—9 单位反馈系统的结构如图所示,现用速度反馈来校正系统,校正后系统具有临界
盛年不重来,一日难再晨。及时宜自勉,岁月不待人。 一、求下图所示系统的传递函数 ) (/)(0s U s U i 。 (10分) ) 1()()(313 2320+++-=CS R R R R CS R R s U s U i 一、控制系统方块图如图所示: (1)当a =0时,求系统的阻尼比ξ,无阻尼自振频率n ω和单位斜坡函数输入时的稳态误差; (2)当ξ=0.7时,试确定系统中的a 值和单位斜坡函数输入时系统的稳态误差; 系统的开环传函为 s a s s G )82(8)(2++= 闭环传函为8 )82(8 )()(2 +++=s a s s R s Y 25.0 83.2 36.0===ss n e ωξ 4 25.0==ss e a 设某控制系统的开环传递函数为 ) 22()(2 ++= s s s k s G 试绘制参量k 由0变至∞时的根轨迹图,并求开环增益临界值。 (15分) 1)j p j p p --=+-==110321 2) πππ?σ3 5 ,,332=- =a a (10分) 3)ω=j 2±,c k =4,开环增益临界值为K=2 设某系统的特征方程为23)(2 3 4 +--+=s s s s s D ,试求该系统的特征根。 列劳斯表如下
022******* 2 34s s s s --- (4分) 得辅助方程为0 222=+-s ,解得 1,121-==s s (4分) 最后得1, 2 43=-=s s 设某控制系统的开环传递函数为 )()(s H s G = ) 10016() 12.0(752 +++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值 剪切频率为s rad c /75.0=ω 某系统的结构图和Nyquist 图如图(a)和(b)所示,图中 2)1(1)(+=s s s G 2 3 )1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程 正实部根的个数。 (16分)
一、设最小相位系统的开环幅频特性曲线(渐近线)如图所示,试确定系统的开环传递函数,求出系统的相角裕量,说明系统的稳定性。 /s /s
(a)解:①由开环幅频特性写传递函数。根据低频段的斜率为-20dB/dec ,传递函数有1阶积分环节。根据转折频率和斜率的变化,传递函数有2个惯性环节,故可得, ) 1)(1()(210++= s T s T s K s G /s /s
②求时间常数。 25 .011 1 1== = ωT 1.0101122===ωT ③求K 。 由题图5.0=ω时,dB 20lg 20=ω K , 10l 20lg 20g K =ω 10=ω K , 55.010=?=K 系统的开环传递函数为, ) 11.0)(12(5 )(0++= s s s s G 求穿越频率, 20)5.0log (log 40=-c ω, 205 .0log 40=c ω, 58.1=c ω 相 角 裕 量 为, 00058.8)58.11.0arctan()58.12arctan(90)(180=??=Φ+=--c ωγ 故系统稳定。 (b)解:①由开环幅频特性写传递函数。根据低频段的斜率为0dB/dec ,传递函数没有积分环节。根据转折频率和斜率的变化,传递函数有2个惯性环节,故可得, ) 1)(1()(210++= s T s T K s G ②求时间常数。 5.0211 1 1== = ωT 0125.080 1122===ωT ③求K 。 由题图系统的低频段有,dB 20lg 20=K , 10=K
系统的开环传递函数为, ) 10125.0)(15.0(10 )(0++= s s s G 穿越频率为,20=c ω 相角裕量为,0067.81)200125.0arctan()205.0arctan(180=??=--γ 故系统稳定。 (c)解:①由开环幅频特性写传递函数。根据低频段的斜率为-40dB/dec ,传递函数有2阶积分环节。根据转折频率和斜率的变化,传递函数有惯性环节和比例微分环节,故可得, )1() 1()(2210++= s T s s T k s G ②求时间常数。 101 .011 2 1== = ωT , 1112==ωT ③求K 。 由题图1.0=ω时,dB 20lg 202 =ω K , 10lg 20lg 202 =ω K 102 =ω K , 1.0101.02 =?=K 系统的开环传递函数为, ) 1() 110(1.0)(20++= s s s s G 穿越频率为,1=c ω 相角裕量为, 0029.39)110arctan()11arctan()(180=?+?=Φ+=-c ωγ 故系统稳定。