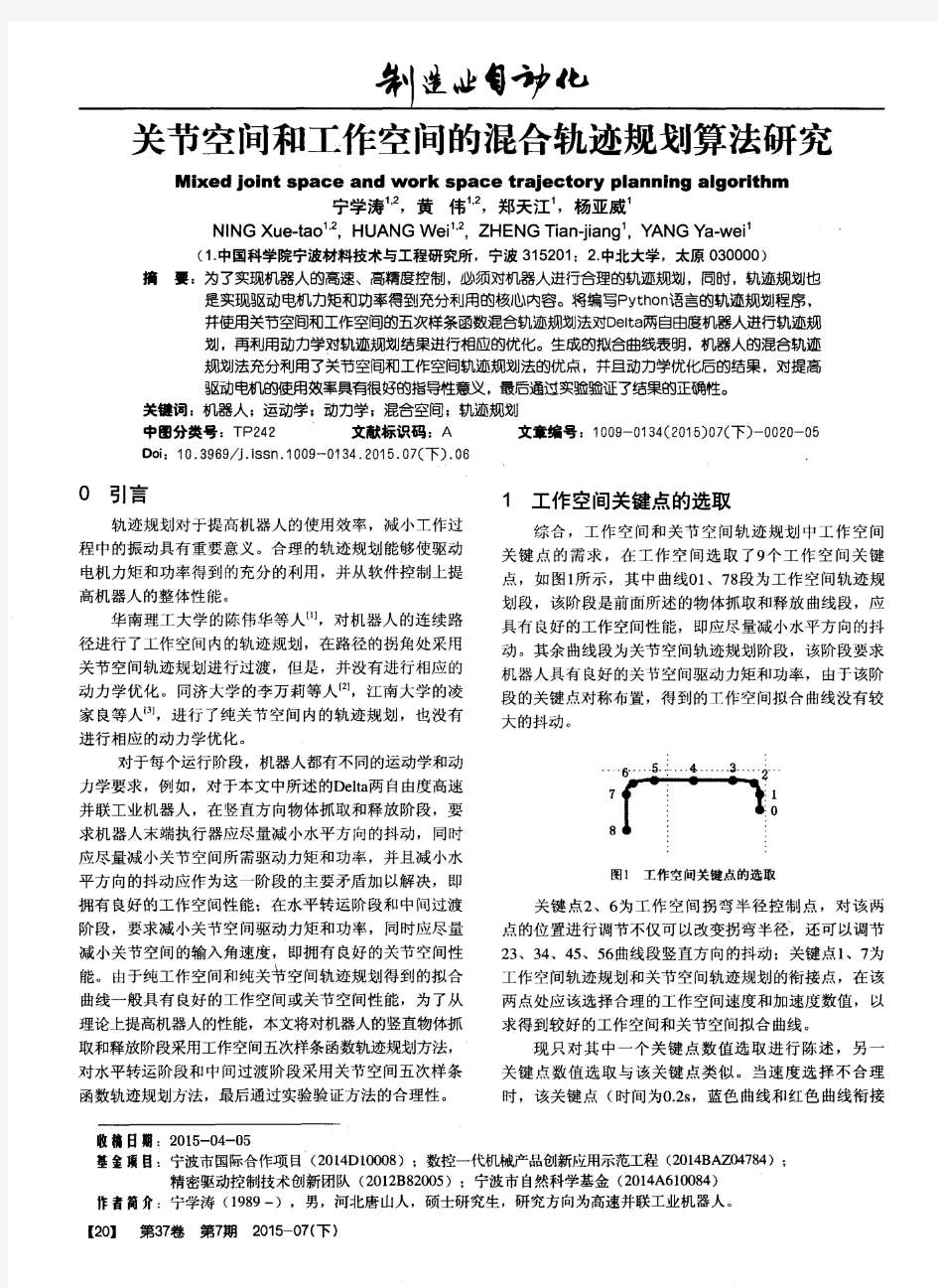
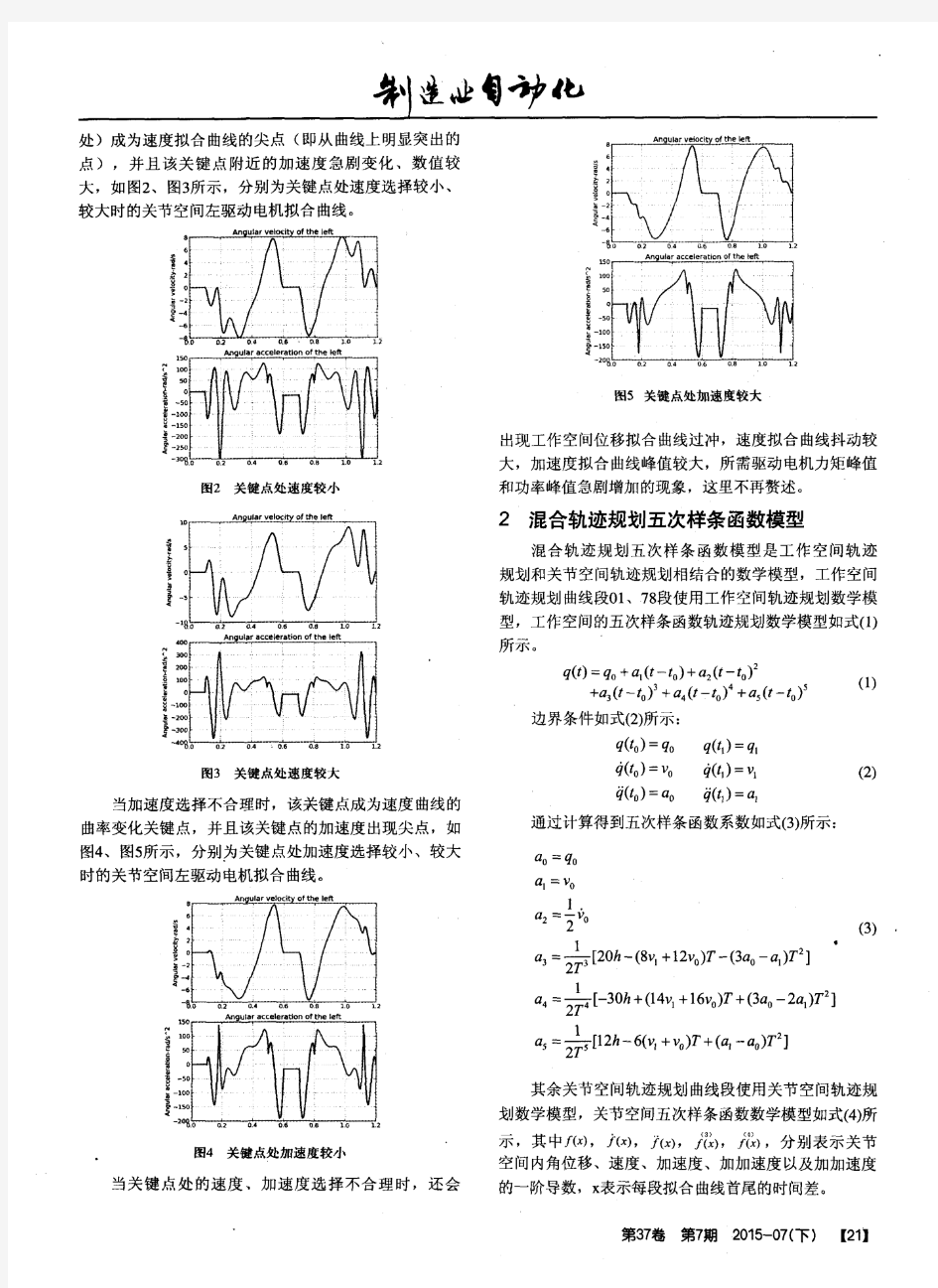
机器人轨迹规划算法的分析 摘要: 本文根据机器人最优轨迹规划的约束与要求,采用了一种新的基于最小耗能的轨迹规划方法。该方法在传统的差分进化算法的基础上,采用样条插值法来获得机器人连续型的最优轨迹。通过MA TLAB软件建立机器人模型,并且编写了其轨迹规划的程序进行仿真。仿真结果表明,差分进化算法是一种性能优良的,具有高效性、并行性、鲁棒性等优点的轨迹规划方法。 1.引言 机器人技术是综合了力学、机械学、电子学、生物学、控制论、计算机、人工智能、系统工程等多种学科领域知识的高新技术,是当代研究十分活跃、应用日益广泛的一门学科。机器人的应用情况,也是一个国家工业自动化水平的重要标志。 机器人的轨迹规划属于底层规划,是在机器人手部运动学的基础上,讨论机器人运动过程中的轨迹和轨迹生成方法。在实际机器人运动规划过程中,机器人的一次作业任务可能要经过多个作业点,这就可能导致产生多个可能的结果。这时,就需要采用一种策略从这些结果中选出一个最优的路径。同时还需要意识到,机器人运动过程中各关节运动轨迹函数必须是连续和平滑的。此外,操作臂的运动也应该平稳,不平稳的运动会加速机器部件磨损,并且导致对操作臂的振动和冲击。这就要求寻找到一条最优的轨迹规划,使其满足多种约束条件和性能指标。通常研究中以最短时间、最小耗能或者机械臂扫过的扇形面积最小作为优化目标。本文所要研究内容是基于最小耗能性能指标的机器人轨迹规划。 2.机器人轨迹规划算法的介绍 1、A*搜索算法 A*算法是一种启发式的图搜索算法,可以在有限的条件中得到一个最优解,并可以在理论上保证全局最优解的收敛性,可以较好地满足轨迹规划问题中的各种约束条件。 A*算法的核心思想是建立启发函数: f(n)=g(n)+h(n)(2.1)式中,g(n)是从起始节点到当前节点n的实际代价值;h(n)是从当前节点n到目标节点的估计值。两者相加得到的就是当前节点的估计价值f(n),然后再对f(n)
路径轨迹规划 (1)加减速控制简述 加减速控制算法的目标是建立加减速过程中速度相对于时间的函数关系式f=V(t)。 按照加减速控制算法与插补算法的先后位置关系,加减速控制方式可分为前加减速控制和后加减速控制。前加减速控制即插补计算前进行加减速运算,其优点在于对合成速度进行控制,不影响位置精度,但是需要预测减速点;后加减速控制即插补计算后进行加减速运算,它是对各插补轴分别进行加减速控制,由于各轴没有协调关系,因此合成位置可能不准确。后加减速控制只适用线性插补,在应用上有很大的局限性。 (2)几种速度控制模型 1)直线加减速速度控制模型 直线加减速是当机床启动、停止或者运动速速改变时,速度将按照一定斜率的直线上升或下降。 数学表达式为:at t +=0)(νν 直线加减速控制算法的主要优点是算法简单,机器人响应快,效率高,适合进行实时运算,但是机器人运动存在柔性冲击,速度的过渡不够平滑。 2)指数加减速速度控制模型 指数加减速是启动或停止时的速度发生突变,并且速度变化随时间按指数规律上升或下降。 速度数学表达式为: 加速时:)1()(τ t c e v t v --= 减速时:τ t c e v t v -=)( 加速度数学表达式为: 加速时:ττ t c e v t a -=)()( 减速时:ττ t c e v t a --=)()( 指数型加减速曲线的优点是数学表达式相对简单,可以实时计算,加减速结 束时加速度变小冲击变小;缺点是启动过程仍存在较大冲击。 2)S 曲线加减速速度控制模型 通过对启动阶段即高速阶段的加速度衰减,来保证电机性能的充分发挥和减小启动冲击。 正常情况下S 曲线加减速的运行过程分为7段:加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段、减减速段,如下图所示:
第4章机器人轨迹规划 本章在操作臂运动学和动力学的基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法。所谓轨迹,是指操作臂在运动过程中的位移、速度和加速度。而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹。首先对机器人的任务,运动路径和轨迹进行描述,轨迹规划器可使编程手续简化,只要求用户输入有关路径和轨迹的若干约束和简单描述,而复杂的细节问题则由规划器解决。例如,用户只需给出手部的目标位姿,让规划器确定到达该目标的路径点、持续时间、运动速度等轨迹参数。并且,在计算机内部描述所要求的轨迹,即选择习惯规定及合理的软件数据结构。最后,对内部描述的轨迹、实时计算机器人运动的位移、速度和加速度,生成运动轨迹。 4.1 机器人轨迹规划概述 一、机器人轨迹的概念 机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。 机器人在作业空间要完成给定的任务,其手部运动必须按一定的轨迹(trajectory)进行。轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。工业机器人轨迹规划属于机器人低层规划,基本上不涉及人工智能的问题,本章仅讨论在关节空间或笛卡尔空间中工业机器人运动的轨迹规划和轨迹生成方法。 机器人运动轨迹的描述一般是对其手部位姿的描述,此位姿值可与关节变量相互转换。控制轨迹也就是按时间控制手部或工具中心走过的空间路径。 二、轨迹规划的一般性问题 通常将操作臂的运动看作是工具坐标系{T}相对于工件坐标系{S}的一系列运动。这种描述方法既适用于各种操作臂,也适用于同一操作臂上装夹的各种工具。对于移动工作台(例如传送带),这种方法同样适用。这时,工作坐标{ S }位姿随时间而变化。 例如,图 4.1所示将销插入工件孔中的作业可以借助工具坐标系的一系列位姿 图4.1 机器人将销插入工件孔中的作业描述
机械臂运动的轨迹规划 摘要 空间机械臂是一个机、电、热、控一体化的高集成的空间机械系统。随着科技的发展,特别是航空飞机、机器人等的诞生得到了广泛的应用,空间机械臂作为在轨迹的支持、服务等以备受人们的关注。本文将以空间机械臂为研究对象,针对空间机械臂的直线运动、关节的规划、空间直线以及弧线的轨迹规划几个方面进行研究,对机械臂运动和工作空间进行了分析,同时对机械臂的轨迹规划进行了验证,利用MATLAB软件对机械臂的轨迹进行仿真,验证算法的正确性和可行性,同时此路径规划方法可以提高机械臂的作业效率,为机械臂操作提高理论指导,为机器人更复杂的运动仿真与路径规划打下基础。 本文一共分为四章: 第一章,首先总结了机械臂运动控制与轨迹规划问题的研究现状及研究方法,归纳了各种轨迹规划的算法及其优化方法,阐述了机械臂的研究背景和主要内容。 第二章,对机械臂的空间运动进行分析研究,采用抽样求解数值法—蒙特卡洛方法,进行机械臂工作空间求解,同时在MATLAB中进行仿真,直观展示机械臂工作范围,为下一章的轨迹规划提供理论基础;同时通过D-H参数法对机械臂的正、逆运动分析求解,分析两者的区别和联系。 第三章,主要针对轨迹规划的一般性问题进行分析,利用笛卡尔空间的轨迹规划方法对机械臂进行轨迹规划,同时利用MATLAB对空间直线和空间圆弧进行轨迹规划,通过仿真验证算法的正确性和可行性。 第四章,总结全文,分析本文应用到机械臂中的控制算法,通过MATLAB 结果可以得出本文所建立的算法正确性,能够对机械臂运动提供有效的路径,而且改进了其他应用于空间机械臂的路径规划问题。 【关键词】运动分析工作空间算法研究轨迹规划
路径规划的分类: 一、按路径维数 根据医学影像设备的不同,穿刺手术可以分二维和三维影像导航手术。所以根据应用场合的不同,路径规划也可分为二维路径规划和三维路径规划。 二维路径规划主要应用在超声、CT、X 射线等设备的导航手术中,三维路径规划则主要应用在三维超声、MRI 等设备的导航手术中。 二、按路径形式 根据穿刺路径特点,路径规划又可按照路径形式的不同分为: R 型、S 型、H 型和混合型,即整个路径包含两种以上不同路径形式组合。 三、按规划方向 由路径形式可以看出路径是可逆的,即理论上针可以从目标靶点沿原路返回穿刺至入针点。所以根据路径规划方向可分为正向规划和逆向规划。正向规划即从入针点到目标靶点的穿刺规划,逆向规划是利用针路的可逆性,从目标靶点出发穿刺可以选择的入针区域,来优化入针位姿和整个路径。 四、按规划算法 路径规划按算法大体可分为数值法、搜索法和反解法三大类。 五、算法概述 (一)数值法是通过数值计算的方法来优化路径,通常是利用目标函数的最大或最小值来得到最优路径的方 法。 1)概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。 2)目标函数法是考虑一些优化的指标(如路径最短,绕开障碍物等),建立目标函数,通过计算目 标函数得到最优解。 (二)搜索法是根据路径形式特点,利用计算机的人工智能搜索算法来搜索可行性路径。 1)路线图法主要思想是将自由空间转换成为一维线段所组成的网络,所要找的路径被局限在这个 网络之中,即将路径规划问题转化成图的搜索问题。 i.可视图法是由麻省理工学院的Tomás Lozano-Pérez和IBM研究院的MichaelA.Wesley 于1979年提出的。其最大特点是将障碍物用多边形包围盒来表达。图1表示某一环境 空间,s、g分别称为起始点和目标点。O1和O2表示两个障碍物。图2是构造出的对 应图1的可视图。利用搜索算法规划出从起始点至目标点的最优路径。
摘要 机器人的轨迹规划在机器人的控制中具有重要的地位。良好的轨迹规划是机械手平稳、安全地避开障碍物,完成作业任务的保证。本文根据机器人学的相关理论,以PUMA560为研究对象,建立的D-H坐标系,在关节空间内,运用推广的三次多项式插值法进行了过路径点以满足避障要求的机械手轨迹规划,并且采用MATLAB 软件对具体的规划实例进行了运动仿真,主要绘出了机械手各关节的角位移、角速度和角加速度曲线。结果显示,每条曲线都是连续而光滑的,保证了各关节的运动平稳性,说明此次规划完全符合要求。 由此可以得出结论,过路径点的三次多项式插值法不仅能满足机械手速度和加速度的连续性要求,而且能通过主动选择路径点以满足避障要求。这种轨迹规划方法可以很好解决机械臂在工作过程中的平稳性、实时性等问题,而且简单易行。 关键词:轨迹规划;多项式插值;避障;MA TLAB仿真
Abstract Robot’s path planning plays an important role in controlling the robot.Good trajectory planning can guarantee manipulator avoid obstacles and finish the tasks smoothly and safely. Based on the theory of robot kinematics,this article use PUMA560 type mechanical arm to detablish D-H coordinate system and make trajectory planning by using extent cubic polynomial interpolation in joint space to meet the requirements of avoiding obstacles,and then use MA TLAB software example for the planning,and mainly draw angular displacement,velocity and angle acceleration curve of each joint.The result show that every curve is continuous and smooth so it can guarantee the stability of each joint movement.So this trajectory planning fully meet the requirements. So it comes to a conclusion that the cubic polynomial interpolation method can not only satisfy the requirements of continuitiy of the robot velocity and acceleration,but also can avoid obstacles by choosing path piont actively. This method of the path planning can make sure the manipulator working steadily in the course of its work well and can also solve the problem of the accuracy and the real-time characteristic,and it is easy to perform. Key words:Path planning;Polynomial interpolation; avoid obstacles;Matlab simulation