PIV 用于微尺度滑移长度测量的问题
李战华、郑旭
中国科学院力学研究所LNM 实验室,100190,北京
摘要:本文简单介绍了滑移边界条件的基本概念、测量壁面滑移的实验方法,着重分析了焦平面厚度等几个重要因素在MicroPIV 壁面滑移测量中的影响。根据实验发现的近壁粒子浓度非线性分布现象,解释了测量速度偏大的可能原因。
1 微尺度流动滑移问题
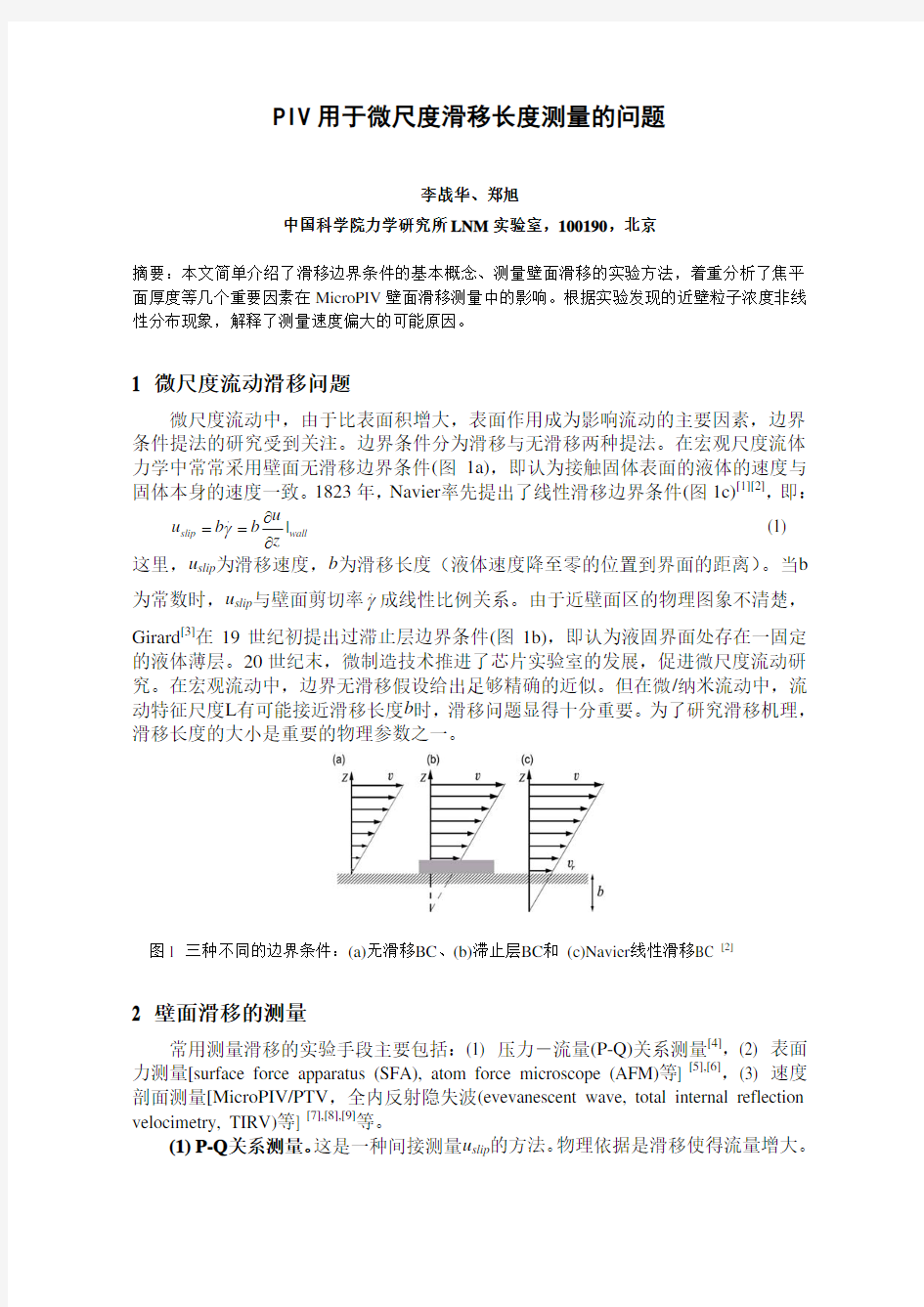
微尺度流动中,由于比表面积增大,表面作用成为影响流动的主要因素,边界条件提法的研究受到关注。边界条件分为滑移与无滑移两种提法。在宏观尺度流体力学中常常采用壁面无滑移边界条件(图1a),即认为接触固体表面的液体的速度与固体本身的速度一致。1823年,Navier 率先提出了线性滑移边界条件(图1c)[1][2],即:
|slip wall u u b b z
γ?==? (1) 这里,u slip 为滑移速度,b 为滑移长度(液体速度降至零的位置到界面的距离)。当b 为常数时,u slip 与壁面剪切率γ 成线性比例关系。由于近壁面区的物理图象不清楚,Girard [3]在19世纪初提出过滞止层边界条件(图1b),即认为液固界面处存在一固定的液体薄层。20世纪末,微制造技术推进了芯片实验室的发展,促进微尺度流动研究。在宏观流动中,边界无滑移假设给出足够精确的近似。但在微/纳米流动中,流动特征尺度L 有可能接近滑移长度b 时,滑移问题显得十分重要。为了研究滑移机理,滑移长度的大小是重要的物理参数之一。
图1 三种不同的边界条件:(a)无滑移BC 、(b)滞止层BC 和 (c)Navier 线性滑移BC [2]
2 壁面滑移的测量
常用测量滑移的实验手段主要包括:(1) 压力-流量(P-Q)关系测量[4],(2) 表面力测量[surface force apparatus (SFA), atom force microscope (AFM)等] [5],[6],(3) 速度剖面测量[MicroPIV/PTV ,全内反射隐失波(evevanescent wave, total internal reflection velocimetry, TIRV)等] [7],[8],[9]等。
(1) P-Q 关系测量。这是一种间接测量u slip 的方法。
物理依据是滑移使得流量增大。
以半径为r 微圆管为例。实验测量管道流量为Q exp ,Poiseuille 管流的无滑移理论流量Q P 与Q exp 之差即为滑移导致流量增加,因此滑移速度为:
4exp exp 2211()(8slip p )pr u Q Q Q r r πππΔ=?=?L
μ (2) P-Q 关系测量虽然是一种简便的方法,但其测量结果受到很多限制。因为理论上Q ~r 4,管径r 的测量误差成为最终测量误差的主要来源。管道截面形状的规则程度,管径延长度方向分布的均匀性和管径测量的精度都对结果有重大影响。
(2) 表面力测量。SFA 和AFM 测量表面力是根据相互接近的小球或平板之间的水动力学阻力的无滑移条件Taylor 解。Vinogradova(1995)[5] 给出滑移修正:
26h r v F f h
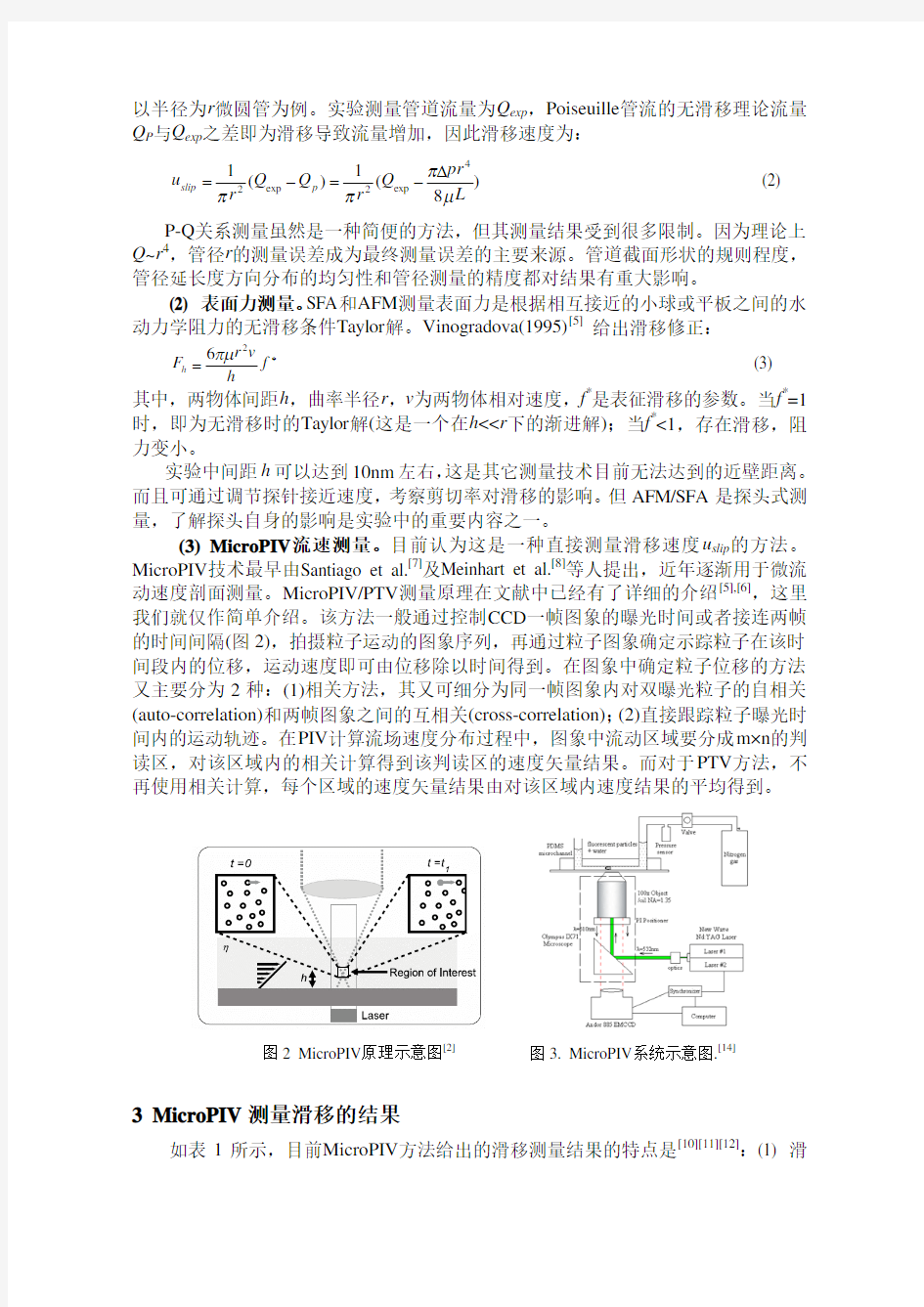
πμ?= (3) 其中,两物体间距h ,曲率半径r ,v 为两物体相对速度,f *是表征滑移的参数。当f *=1时,即为无滑移时的Taylor 解(这是一个在h < 实验中间距h 可以达到10nm 左右,这是其它测量技术目前无法达到的近壁距离。而且可通过调节探针接近速度,考察剪切率对滑移的影响。但AFM/SFA 是探头式测量,了解探头自身的影响是实验中的重要内容之一。 (3) MicroPIV 流速测量。目前认为这是一种直接测量滑移速度u slip 的方法。MicroPIV 技术最早由Santiago et al.[7]及Meinhart et al.[8]等人提出,近年逐渐用于微流动速度剖面测量。MicroPIV/PTV 测量原理在文献中已经有了详细的介绍[5],[6],这里我们就仅作简单介绍。该方法一般通过控制CCD 一帧图象的曝光时间或者接连两帧的时间间隔(图2),拍摄粒子运动的图象序列,再通过粒子图象确定示踪粒子在该时间段内的位移,运动速度即可由位移除以时间得到。在图象中确定粒子位移的方法又主要分为2种:(1)相关方法,其又可细分为同一帧图象内对双曝光粒子的自相关(auto-correlation)和两帧图象之间的互相关(cross-correlation);(2)直接跟踪粒子曝光时间内的运动轨迹。在PIV 计算流场速度分布过程中,图象中流动区域要分成m×n 的判读区,对该区域内的相关计算得到该判读区的速度矢量结果。而对于PTV 方法,不再使用相关计算,每个区域的速度矢量结果由对该区域内速度结果的平均得到。 图2 MicroPIV 原理示意图[2] 图3. MicroPIV 系统示意图.[14] 3 MicroPIV 测量滑移的结果 如表1所示,目前MicroPIV 方法给出的滑移测量结果的特点是[10][11][12]:(1) 滑 移长度的测量结果分散在50nm -1μm 范围;(2)壁面附近测量速度常出现明显的突然偏大现象。而现有理论一般认为在光滑亲水表面,滑移长度近似为0[2]。AFM/SFA 的测量结果也显示亲水壁面滑移长度小于1.5nm [13]。 显然,MicroPIV 的已有测量结果并不能令人满意,值得我们重新推敲。本文将就MicroPIV 近壁速度测量进行分析。 表3.1 已有MicroPIV 滑移测量结果 溶液 粒子 剪切率 壁面接触角 滑移长度 与剪切率关系 Tretheway & Meinhart [10] Di-water 300nm 102-104s -190~100° OTS 1μm ±400nm 未比较Devasenathipathy [11]Di-water 200nm ~2000 90° 硅 ~500nm 未比较102-103s -1 亲水玻璃 50 ±50nm 无关 Joseph et al. [12]Di-water 200nm 102-103s -1 95° OTS 57 ±100nm 无关 亲水玻璃 20~50nm 有关 Huang & Breuer [9]Di-water 200nm 200-2000120°OTS 20~100nm 有关 4 MicroPIV 测量技术与误差来源 4.1 实验装置 以中科院力学所LNM 室的MicroPIV 系统为例,该系统主要由荧光倒置显微镜(Olympus IX71)、EMCCD(Andor 885)、纳米位移控制器(Physik Instrument LVPZT E665)、双脉冲激光器(New Wave 120XT)、同步控制器(北京立方天地Micropulse 710)等组成(图3)。压力驱动装置包括高压氮气瓶、压力传感器、温度传感器、调压阀门和输气管路等。该系统已进行了微流动相关的速度测量[14][15]。 4.2 误差来源 MicroPIV/PTV 测量的误差分析已有文献进行了讨论[16],[17]。 人们已经注意到焦平面厚度的影响,以及微流动特有因素的影响。以下我们对此进行讨论。 (1) 焦平面厚度。MicroPIV 系统是体照明,无法提供真正的片光源,视野中看到的实际是物镜焦平面厚度范围内所有粒子的像。MicroPIV 速度测量是对图象中所有粒子速度信息进行平均。如果垂直方向焦平面厚度范围内,真实速度场非线性分布,会导致平均速度不再代表焦平面中心速度。在剪切流中,这种误差将会比较明显。焦平面厚度的确定一般有两种方法,(a)是由物镜的景深δz [8] (depth of field)给出: 2n ne z NA NA M λδ=+? (4) 其中n 是物镜观测介质的折射率,λ为散射光波长,NA 为物镜数值孔径,M 为物镜放大倍数,e 为CCD 单象素尺度。近来,也有学者认为[18]测量深度(depth of measurement)δz m 才是真正反映焦平面厚度的参数,其定义为: 2 2.163tan p m d n z NA λδp d θ =++ (5) 式中θ为物镜观测半角。如果microPIV 系统使用一般的物镜(20x/NA=0.5),那么可以 估算其δz ≈4.6μm , δz m ≈11.3μm ;而使用100x/NA=1.35的物镜,δz ≈0.6μm ,δz m ≈1.8μm 。 可见,对于微米尺度的测量区域,比如1微米量级的微流动近壁区,焦平面厚度对于速度测量是有显著影响的。 (2) 示踪粒子速度相关的影响。使用示踪粒子测速,需要考察示踪粒子的速度是否能很好地代表当地流场的速度。在MicroPIV 里,人们容易忽视的有两个方面:(a)壁面的存在会施加给粒子额外的阻力。对此Goldman [19]给出了渐进解,当粒子到壁面的距离z 大于粒子半径r 时,粒子速度u p 与当地流体速度u f 的关系为 3 5116p f u r u z ??≈????? (6) 在MicroPIV 中,使用的示踪粒子半径基本在100nm 到1微米的量级,可见在近壁区z 接近r ,此时粒子速度u p 与当地流体速度u f 的偏差会达到约30%。(b)粒子流向电势导致的电泳的影响。由于示踪粒子表面总是会带电荷,那么即使在压力驱动流动中,流向电势会导致粒子产生一个额外的流向电泳速度。Lauga [20]分析了这种因素的影响,给出了此电泳速度的表达式: 2222()3r w p w E c dp u dx εεζζζσμ?=? (7) 其中ε0 是真空介电常数, εr 是流体相对介电常数, dp/dx 是压力梯度, μ是流体粘度, σc 是流体电导率,e 是电子电荷,ζw 和 ζp 分别是壁面和粒子表面的zeta 电势。由此图4. 200nm 粒子近壁速度测量结果.可以估计,u E 可以达到0.1mm/s 的量级,这在微流动里有可能有较大影响。 [15]。 (3).3 实验测量结果改进 们提出了改进速度测量和分析实验结果的方法。 度[14][15],由此 的示踪粒子理论速度u(z)按照浓度分布c(z)加权平均,[15] 图5. 200nm 粒子预期平均测量速度结果近壁区粒子浓度的分布。Zheng & Silber-Li [14][15]通过MicroPIV/PTV 分别使用200nm 和50nm 示踪粒子对亲水玻璃壁面附近进行速度测量(壁面剪切率约1200s -1),发现近壁区约1微米以内,测量速度明显偏大(图4)。如果认为速度偏大是由滑移造成的,估计亲水玻璃壁面滑移长度达到约100nm 。这显然与理论预测不符。实验中发现示踪粒子的浓度分布不均匀,即越靠近壁面,粒子浓度越低。在焦平面内对粒子测量速度积分求平均时,粒子浓度非均匀分布的影响会显现出来。 4基于以上的分析,我(1) 有效焦平面厚度。我们采用了灰度阈值控制的方法减少了焦平面厚,有效的焦平面厚度Δz 缩小至约0.4μm 。 (2) 粒子浓度分布影响 对有效焦平面厚度Δz 内得到的预期平均测量速度0'()u z 为: 0/2()()z z u z c z +Δ∫000/2 0/2/2 '()()z z z z z z dz u z c z dz ?Δ+Δ?Δ=∫ (8) 如果0'()u z 能与实验测量速度符合,说明有效焦平面深度和粒子浓度分布不均确实是的改进结果由图5给出,图中虚线为预期测量速度分布。结果显示,200nm 粒子的差是由滑移和4.2节中(2)讨论的粒子速度影响共同造成的,那么光oPIV 在微流动研究尤其是滑移研究中已经获得了广泛的利用,但给出的近速量结果普遍偏大。本文简单介绍了滑移边界条件的基本概念、测量壁面滑1)和863项目 007AA04Z302)的支持。 ] C.L.M.H. Navier. Mémoire sur les lois du mouvement des fluids Mem. Acad. Sci. Inst. Fr. 1823. D.R.Evans, E.Bonaccurso, H-J.Butt and V .S.J.Craig. Boundary slip in Newtonian liquids: a review of [hydrophilic and hydrophobic microchannels. Physics LANGMUIR 18 (26): 10058-10063, 2002. . on velocimetry. J. Fluid. Mech. Vol.566, 447-464, 2006. 测量偏差的来源。对200nm 和50nm 粒子的测量结果分别使用上述方法分析。200nm 预期平均测量速度分布与实际测量速度分布接近。这说明有效焦平面深度和粒子浓度分布不均确实是近壁测量速度偏大的主要来源。50nm 粒子的粒子能获得更为准确的测量结果。 经过以上对焦平面深度和粒子分布影响的修正,如果认为此时实际测量速度和预期测量速度之滑亲水壁面的滑移长度的上限约为10nm ,比之前面100nm 的估计值更为合理。 小结 5 Micr 壁度测移的实验方法,着重分析了焦平面厚度等几个重要因素在MicroPIV 壁面滑移测量中的影响。根据实验发现的近壁粒子浓度非线性分布现象,解释了测量速度偏大的可能原因。总之,近壁速度测量是观测微/纳尺度流动的重要实验手段,与宏观PIV 技术相比,增加了许多新的影响因素,需要进一步通过实验探索解决。 致谢:作者感谢国家自然科学基金(10672172),国家973项目(2007AC74470(2 参考文献 [1[2] https://www.doczj.com/doc/a73954607.html,o, experimental studies. Rep. Prog. Phys. V ol.68, 2859-2897, 2005. [3] P.S. Girard. Mémoires de la Classe des Sciences Mathématiques et Physiques de l’Institut de France 14, 329, 1815. 4] C-H. Choi, J. A. Westin and K. Breuer. Apparent slip flows in of Fluids, V ol.15, No.10, 2897-2902, 2003. [5] O. Vinogradova. Drainage of a Thin Liquid Film Confined between Hydrophobic Surfaces. Langmuir, 11, 2213, 1995. [6] YX. Zhu and S. Granick. No-slip boundary condition switches to partial slip when fluid contains surfactant. [7] J.G. Santiago, S.T. Wereley, C.D. Meinhart, D.J. Beebe, R.J. Adrian. A partical image velocimetry system for microfluidics. Exp Fluids 25:316-319, 1998[8] C.D. Meinhart, S.T. Wereley, J.G . Santiago. PIV measurements of a microchannel flow. Exp Fluids 25:414-419, 1999. [9] P. Huang, J.S. Guasto and K. S. Breuer. Direct measurement of slip velocities using three-dimensional total internal reflecti [10] D.C. Trethway and C.D. Meinhart. Apparent fluid slip at hydrophobic microchannel wall. Phys Fluids 14(3): L9-L11,2002. [11] S. Devasenathipathy, J.G. Santiago, S.T. Wereley, C.D. Meinhart, K. Takehara. Particle imaging techniques for microfabricated fluidic systems. Exp Fluids 34:504-514, 2003. [y condition for hydrophilic particles. Phys Rev Letters , 2008. p Fluids, 2008 S174, 2000. 103606, 2005. 20[G. Kazarian, B.J. Briscoe, C.J. Lawrence. Effects of particle size on near-wall depletion in nce 280:511-517,2004 [12] P. Joseph & P. Tabeling. Direct measurement of the apparent slip length. Physical review E. Vol.71, 035303, 2005. 13] C.D.F. Honig, W.A. Ducker. No-slip hydrodynamic boundar 98:028305, 2007. [14] X. Zheng, ZH. Silber-Li. Measurement of velocity profiles in a rectangular microchannel with aspect ratio α=0.35. Exp Fluids, 44, 951[15] X. Zheng, ZH. Silber-Li. The effect of particle concentration distribution in near wall velocity measurements by microPTV . Submitted to Ex [16] M.G. Olsen, R.J. Adrian. Out-of-focus effects on particle image visibility and correlation in microscopic particle image velocimetry. Exp Fluids 29(7):S166-[17] S.T. Wereley, L. Gui and C.D. Meinhart. Advanced algorithms for microscale particle image velocimetry. AIAA Journal, 40, 1047, 2002. [18] Jia Ou and J.O. Rothstein. Direct velocity measurements of the flow past drag-reducting ultrahydrophobic surfaces. Physics of Fluids. V ol.17.[19] A.J. Goldman, R.G. Cox, H. Brenner. Slow viscous motion of a sphere parallel to a plane wall – ii: Couette flow. Chem Engng Sci 22:653-660, 1967. [20] E. Lauga. Apparent slip due to the motion of suspended particles in flows of electrolyte solutions. Langmuir :8924-8930, 2004. [21] F. White. Viscous fluid flow. pp.123 McGraw-Hill, Inc. 1974. 22] P. Hartman Kok, S.mono-dispersed colloidal suspensions. J Colloid and Interface Scie 第二讲工程测量学的原理、方法和技术Theory,way,technology of engineering surveying 主要内容:观测量和测量定位原理、地面测量方法和技术、专用测量方法与技术、空间测量方法与技术。 难点:专用测量方法与技术、空间测量方法与技术 2. 1概述 工程测量学与大地测量学、摄影测量与遥感学、地图制图学海洋测绘和 测绘仪器学一样,是现代测绘学的分支学科。它即遵循测绘学的基本原理、方法和技术,又为了解决工程和工程建设中的测绘技术问题,工程测量学也形成了具有自身特点的原理、方法和技术,以及各种专用和通用的测量仪器。 2. 2 观测量和测量定位原理 2. 2. 1工程测量中的观测量 工程测量的实质是: 1>通过各种观测量确定客观物体上的特征点在某一坐标系下的三维坐标(平面位置与高程即X,丫,H)及其随时间的变化。 2>根据设计坐标(X,丫,Z)通过各种观测量将设计实体放样到实地。 观测量: 1>角度(方向)观测量 角度观测量又分水平角和垂直角(高度角)或天顶距(观测方向线与铅垂线间的夹角) 所用仪器:经纬仪、全站仪 2>距离观测量 两点间的平距、斜距,一点到直线的距离,一点到平面的距离。 所用仪器:钢尺、皮尺、铟瓦线尺(叫丈量法或机械法) 经纬仪、视距仪(叫视距法或视差法) 测距仪、全站仪(叫物理测距法) GPS全球定位系统(伪距法) 3>高差观测量 两点正常高程之差 所用仪器:钢尺、水准仪、测距仪、全站仪、液体静力水准测量(用于工程变形测量) 4>方位角观测量 地面上某一方向线与真北方向的夹角(真方位角) 所用仪器:陀螺仪(用于矿山、铁路与公路隧道及城市地铁隧道中) 2. 2. 2工程测量中测量定位原理 工程测量的任务:测量、测设或放样 工程测量中所采用的坐标系统: 1>平面一高斯一克吕格平面直角坐标系或独立平面直角坐标系 2>高程一正常高系统 测量定位原理: 1>高差与高程的测定 不论进行水准测量还是利用水准仪进行高程放样,均是利用水平视线测定两 811《量子力学》 中科院研究生院硕士研究生入学考试 《量子力学》考试大纲 本《量子力学》考试大纲适用于中国科学院研究生院物理学相关各专业(包括理论与实验类)硕士研究生的入学考试。本科目考试的重点是要求熟练掌握波函数的物理解释,薛定谔方程的建立、基本性质和精确的以及一些重要的近似求解方法,理解这些解的物理意义,熟悉其实际的应用。掌握量子力学中一些特殊的现象和问题的处理方法,包括力学量的算符表示、对易关系、不确定度关系、态和力学量的表象、电子的自旋、粒子的全同性、泡利原理、量子跃迁及光的发射与吸收的半经典处理方法等,并具有综合运用所学知识分析问题和解决问题的能力。 一.考试内容: (一)波函数和薛定谔方程 波粒二象性,量子现象的实验证实。波函数及其统计解释,薛定谔方程,连续性方程,波包的演化,薛定谔方程的定态解,态叠加原理。 (二)一维势场中的粒子 一维势场中粒子能量本征态的一般性质,一维方势阱的束缚态,方势垒的穿透,方势阱中的反射、透射与共振,d--函数和d-势阱中的束缚态,一维简谐振子。 (三)力学量用算符表示 坐标及坐标函数的平均值,动量算符及动量值的分布概率,算符的运算规则及其一般性质,厄米算符的本征值与本征函数,共同本征函数,不确定度关系,角动量算符。连续本征函数的归一化,力学量的完全集。力学量平均值随时间的演化,量子力学的守恒量。 (四)中心力场 两体问题化为单体问题,球对称势和径向方程,自由粒子和球形方势阱,三维各向同性谐振子,氢原子及类氢离子。 (五)量子力学的矩阵表示与表象变换 态和算符的矩阵表示,表象变换,狄拉克符号,谢振子的占有数表象。 (六)自旋 电子自旋态与自旋算符,总角动量的本征态,碱金属原子光谱的双线结构与反常塞曼效应,电磁场中的薛定谔方程,自旋单态与三重态,光谱线的精细和超精细结构,自旋纠缠态。 (七)定态问题的近似方法 定态非简并微扰轮,定态简并微扰轮,变分法。 (八)量子跃迁 量子态随时间的演化,突发微扰与绝热微扰,周期微扰和有限时间内的常微扰,光的吸收与辐射的半经典理论。 中国科学院大气物理研究所 中国科学院大气物理研究所简介 大气物理研究所前身是1928年成立的原中央研究院气象研究所。现有职工325人,其中科技人员251人,有中国科学院院士7人,研究员46人,副研究员和高级工程师86人,中级科技人员108人。大气所是博士、硕士学位授予单位和博士后流动站建站单位。是中国科学院博士生重点培养基地,国家毕业生就业重点保证单位。现有在学博士生211人,硕士生105人,博士后18人。 大气物理研究所主要研究大气中各种运动和物理化学过程的基本规律及其与周围环境的相互作用,特别是研究在青藏高原、热带太平洋和我国复杂陆面作用下的东亚天气气候和环境的变化机理、预测理论及其探测方法,以建立东亚气候系统和季风环境系统的理论体系及遥感观测体系,发展新的探测和试验手段,为天气、气候和环境的监测、预测和控制提供理论和方法。四个优势创新研究领域是:气候系统动力学和预测理论研究、大气环境和人类生存环境变化动力学和预测理论研究、中层大气与遥感理论和技术研究、中小尺度天气系统与灾害研究。 大气物理研究所拥有的科研部门包括:大气科学和地球流体力学数值模拟国家重点实验室、大气边界层物理与大气化学国家重点实验室、中国科学院东亚区域气候-环境重点实验室、中层大气遥感与探测开放实验室、云降水物理与强风暴实验室、国际气候与环境科学中心、竺可桢--南森国际研究中心、灾害性气候研究与预测中心、中国生态系统研究络大气分中心、季风系统研究中心。另外还设有信息科学中心。 2005年,大气物理所知识创新工程全面推进阶段工作进展顺利,科研工作取得若干重要进展,气候数值模式、模拟及气候可预报性研究项目荣获2005年度国家自然科学二等奖;获得湖北省科技进步一等奖1项,中国人民解放军科学技术进步二等奖1项,中国气象局气象科技奖成果应用奖一等奖 1项,国家教育部科学技术进步二等奖1项。共发表科技论文469篇,其中ScI收录论文126篇,申报专利5项。队伍建设和人才培养工作成效显著,叶笃正荣获国家科学技术最高奖,并作为第一主持人荣获国家科学技术进步二等奖;吕达仁当选为中国科学院院士。一批科研和管理人员以及研究生获得了各类奖项,取得佳绩。制度化、民主化、科学化三化建设继续向前推进。 2005年,申请获得973项目北方干旱化与人类适应1项、973课题2项、863专题3项;获得国家自然科学基金各类项目29项,包括4个重点基金、面上基金23项,杰出A和杰出B各1项;获院方向性项目3项,课题1项。还获 第二讲工程测量学的原理、方法和技术 Theory,way,technology of engineering surveying 主要内容:观测量和测量定位原理、地面测量方法和技术、专用测量方法与技术、空间测量方法与技术。 难点:专用测量方法与技术、空间测量方法与技术2.1 概述 工程测量学与大地测量学、摄影测量与遥感学、地图制图学海洋测绘和测绘仪器学一样,是现代测绘学的分支学科。它即遵循测绘学的基本原理、方法和技术,又为了解决工程和工程建设中的测绘技术问题,工程测量学也形成了具有自身特点的原理、方法和技术,以及各种专用和通用的测量仪器。2.2 观测量和测量定位原理2.2.1 工程测量中的观测量工程测量的实质是: 1> 通过各种观测量确定客观物体上的特征点在某一坐标系下的三维坐标(平面位置 与高程即X, 丫,H)及其随时间的变化。 2>根据设计坐标(X, Y, Z)通过各种观测量将设计实体放样到实地。观测量: 1> 角度(方向)观测量角度观测量又分水平角和垂直角(高度角)或天顶距(观 测方向线与铅垂线间的夹角) 所用仪器:经纬仪、全站仪2> 距离观测量 两点间的平距、斜距,一点到直线的距离,一点到平面的距离。所用仪器:钢尺、皮尺、铟瓦线尺(叫丈量法或机械法)经纬仪、视距仪(叫视距法或视差法)测距仪、全站仪(叫物理测距法)GPS 全球定位系统(伪距法) 3> 高差观测量两点正常高程之差所用仪器:钢尺、水准仪、测距仪、全站仪、液体静力水准测量(用于工程变形测量) 4> 方位角观测量地面上某一方向线与真北方向的夹角(真方位角)所用仪器:陀螺 仪(用于矿山、铁路与公路隧道及城市地铁隧道中) 2.2.2 工程测量中测量定位原理工程测量的任务:测量、测设或放样工程测量中所采用的坐标系统:1> 平面—高斯—克吕格平面直角坐标系或独立平面直角坐标系2> 高程—正常高系统 测量定位原理: 1> 高差与高程的测定不论进行水准测量还是利用水准仪进行高程放样,均是利用水平视线测定两 研究所代码 代码研究所 80005 中国科学院武汉岩土力学研究所 80007 中国科学院力学研究所 80008 中国科学院物理研究所 80009 中国科学院高能物理研究所 80010 中国科学院声学研究所 80012 中国科学院理论物理研究所 80014 中国科学院上海原子核研究所 80017 中国科学院近代物理研究所 80018 中国科学院国家天文台南京天文光学技术研究所80019 中国科学院国家天文台长春人造卫星观测站80020 中国科学院武汉物理与数学研究所 80021 中国科学院紫金山天文台 80022 中国科学院上海天文台 80023 中国科学院云南天文台 80024 中国科学院国家授时中心 80025 中国科学院国家天文台 80026 中国科学院声学研究所东海研究站 80027 中国科学院渗流流体力学研究所 80028 中国科学院新疆理化技术研究所 80029 中国科学院自然科学史研究所 80030 中国科学院理化技术研究所 80032 中国科学院化学研究所 80033 中国科学院广州化学研究所 80035 中国科学院上海有机化学研究所 80036 中国科学院成都有机化学研究所 80037 中国科学院长春应用化学研究所 80038 中国科学院大连化学物理研究所 80039 中国科学院兰州化学物理研究所 80040 中国科学院上海硅酸盐研究所 80041 中国科学院过程工程研究所 80042 中国科学院生态环境研究中心 80043 中国科学院山西煤炭化学研究所 80045 中国科学院福建物质结构研究所 80046 中国科学院青海盐湖研究所 80053 中国科学院兰州地质研究所 80054 中国科学院古脊椎动物与古人类研究所 80055 中国科学院南京地质古生物研究所 80057 中国科学院测量与地球物理研究所 80058 中国科学院大气物理研究所 80060 中国科学院地理科学与资源研究所 80061 中国科学院南京地理与湖泊研究所 第一章、对准、调焦 ?对准、调焦的定义、目的; 1.对准又称横向对准,是指一个对准目标与比较标志在垂直瞄准轴方向像的重合或置 中。目的:瞄准目标(打靶);精确定位、测量某些物理量(长度、角度度量)。 2、调焦又称纵向对准,是指一个目标像与比较标志在瞄准轴方向的重合。 目的: --使目标与基准标志位于垂直于瞄准轴方向的同一个面上,也就是使二者位于同一空间深度; --使物体(目标)成像清晰; --确定物面或其共轭像面的位置——定焦。 人眼调焦的方法及其误差构成; 清晰度法:以目标和标志同样清晰为准则; 消视差法:眼睛在垂直视轴方向上左右摆动,以看不出目标和标志有相对横移为准则。可将纵向调焦转变为横向对准。 清晰度法误差源:几何焦深、物理焦深; 消视差法误差源:人眼对准误差; 几何焦深:人眼观察目标时,目标像不一定能准确落在视网膜上。但只要目标上一点在视网膜上生成的弥散斑直径小于眼睛的分辨极限,人眼仍会把该弥散斑认为是一个点,即认为成像清晰。由此所带来的调焦误差,称为几何焦深。 物理焦深:光波因眼瞳发生衍射,即使假定为理想成像,视网膜上的像点也不再是一个几何点,而是一个艾里斑。若物点沿轴向移动Δl后,眼瞳面上产生的波像差小于λ/K(常取K=6),此时人眼仍分辨不出视网膜上的衍射图像有什么变化。 (清晰度)人眼调焦扩展不确定度: (消视差法)人眼调焦扩展不确定度: 人眼摆动距离为b ?对准误差、调焦误差的表示方法; 对准:人眼、望远系统用张角表示;显微系统用物方垂轴偏离量表示; 调焦:人眼、望远系统用视度表示;显微系统用目标与标志轴向间距表示 ?常用的对准方式; 22 22 122 8 e e e D KD αλ φφφ ???? ''' =+=+ ? ? ???? 121 11e e l l D α φ'=-= 22 21 118 e l l KD λ φ'=-= e b δ φ'= 中国科学院理化技术研究所 科研物资采购管理暂行办法 为规范理化所科研物资采购管理,严格执行国家相关法规和管理制度,根据财政部和中国科学院有关事业单位国有资产管理实施办法以及政府采购的相关规定,结合我所实际情况特制订《理化所科研物资采购管理暂行办法》。 一、科研物资采购范围 科研物资采购范围包括科研材料与科研设备等。 科研材料主要指用于科研活动直接需要和间接需要的不纳入固定资产管理的各类物资; 科研设备包括整机设备、自行研制设备、委托加工设备等。 二、科研物资采购经费 科研物资采购经费包括课题项目经费、所公用经费以及研究所其它经费等。 三、科研物资采购流程 科研物资采购流程包括采购计划报批、确定采购方案、实施采购、验收入库等环节。 1.采购计划报批: 凡属政府采购范围内的科研物资,采购部门须在采购计划报批之前,根据上级部门的统一要求提前跨年度申报预算(具体申报时间以所资产办下发通知为准)。 采购3万元(含)以上科研物资,采购部门须填报《理化所科研物资采购审批表》(附件1)。其中主管业务部门须依据项目任务书或科研活动的需要对物资采购申请进行严格把关。 其中对于采购金额在50万元(含)以上的进口设备,采购部门实施采购前,还需通过资产办组织所外专家进行评审,并上报财政部审批。 2.确定采购方案: 采购部门在完成《理化所科研物资采购审批表》逐级审批后,即可进入采购方案的论证阶段。须组建采购小组,由采购小组组织并通过调研和论证等方式确定采购方案,填报《理化所科研物资采购方案论证报告》(附件2)。 对于单项或批量采购金额一次性在50万元(含)以上的科研物资,须执行政府采购相关规定。 对于单项或批量采购金额一次性在120万元(含)以上的科研物资,须采用公开招标方式(由资产办组织实施),附招投标过程相关文件与材料。 对于委托加工与研制的科研物资,附选定供货商的资质证明等(有效期限内的营业执照、生产许可证复印件)。 1H412010测量技术 前言 本节的重点是:机电工程项目工程测量技术、起重技术、焊接技术,也是机电工程一级建造师必备的基本专业技术知识。 工程测量是指遵照施工图纸的要求,使用精密的测量仪器和工具,将工程项目的建(构)筑物、机电工程工艺生产线上的设备、系统管线等的坐标位置、几何形状、相关数据等准确地测量、放样到实地,并在施工全过程中进行测量控制。 本目重点是: 机电工程测量的方法; 测量的要求; 测量仪器的应用。 1H412011测量的方法 工程测量是按照设计和施工的要求将设计的建筑物、构筑物的平面位置和高程在地面上标定出来,作为施工的依据,并在施工过程中进行一系列的测量工作,以衔接和指导各工序之间的施工。 本条主要知识点是: 工程测量的目的和内容;工程测量的特点、工程测量的原则和要求;工程测量的基本原理及方法;工程测量的程序;竣工图的绘制;常见的机电工程中的测量。 一、工程测量的目的和内容 1.工程测量的目的 (1)工程测量的首要工作也是要做好控制点布测。工程测量包括对建(构)筑物施工放样、建(构)筑物变形监测、工程竣工测量等,以保证将设计的建(构)筑物位置正确地测设到地面上,作为施工的依据。 (2)工程测量贯穿于整个施工过程中。从场地平整、建筑物定位、基础施工、建筑物构件安装等,都需要进行工程测量,以使建筑物、构筑物各部分的尺寸、位置符合设计要求。 2.主要内容 (1)建立施工控制网。 (2)建筑物、构筑物的详细测设。 (3)检查、验收。每道施工工序完工之后,都要通过测量检查工程各部位的实际位置及高程是否与设计要求相符合。 (4)变形观测。随着施工的进展,测定建筑物在平面和高程方面产生的位移和沉降,收集整理各种变形资料,作为鉴定工程质量和验证工程设计、施工是否合理的依据。 二、工程测量的特点 与测图工作相比,具有如下特点: 1.目的不同。测图工作是将地面上的地物、地貌测绘到图纸上,而工程测量是将图纸上设计的建筑物或构筑物测设到实地。 2.精度要求不同。工程测量的精度要求取决于工程的性质、规模、材料、施工方法等因素。 一般高层建筑物的工程测量精度要求高于低层建筑物的工程测量精度,钢结构工程测量精度要求高于钢筋混凝土结构的工程测量精度,装配式建筑物的工程测量精度要求高于非装配式建筑物的工程测量精度。 此外,由于建筑物、构筑物的各部位相对位置关系的精度要求较高,因而工程 中国科学院大气物理研究所 2006年博士生入学试题 《大气化学》(满分100) 一、解释下列各对名词(每组2分,共计40分) 1)干沉降和湿沉降2)光学等效直径和空气动力学等效直径3)气溶胶及 PM 10、PM 2.5 4)热化学平衡和光化学平衡5)原生粒子和次生粒子6)元素 和同位素7)细粒子和硫酸盐8)反应物和前体物9)自由基和链式反应10)化学反应速率常数和平衡常数11)雾和光化学烟雾12)粒子数浓度和质量浓度13)pH 值和酸雨14)光化学反应和量子效率15)温室气体和温室效应16)人工降雨和凝结核17)爱根核和云18)酸雨和酸沉降19)大气寿命和半衰期20)均相化学反应和非均相化学反应 二、简答题(每题10分,共计20分) 1.写出《京都议定书》明确要求发达国家减少排放的6种(类)人造物质名称和 分子式,并从它们大气化学降解速率和过成的角度说明必须减少向大气排放这些物质的原因。(10分) 2.N 2 O是一种重要的温室气体,主要从土壤排放到大气,消耗于平流层。当前国 际上测量土壤N 2 O排放普遍使用的方法是用一定体积的箱子罩在一定面积的土壤 上,通过测量箱内N 2 O浓度随时间的变化率,从而计算其界面交换通量(单位时 间单位面积的质量)。设在两地分别测量土壤N 2 O的排放,采样箱参数和测定值如下表,请问A、B哪个排放通量大?(提示:使用理想气体状态方程,0 ℃=273.5 K ) (10分) (t0浓度是指开始罩箱时的N2O浓度;t1是指开始罩箱后的t1时刻N2O浓度) 三、述题(40分,每题20分) 1.目前城市大气中两种最重要的O 3前体物是VOC和NOx(NO+NO 2 ),下图显示的是 第1页共2页 中国科学院数学与系统科学研究院 *中国科学院数学研究所 *中国科学院应用数学研究所 *中国科学院系统科学研究所 *中国科学院计算数学与科学工程计算研究所 中国科学院物理研究所 中国科学院理论物理研究所 中国科学院高能物理研究所 中国科学院力学研究所 中国科学院声学研究所 中国科学院理化技术研究所 中国科学院化学研究所 中国科学院生态环境研究中心 中国科学院过程工程研究所 中国科学院地理科学与资源研究所 中国科学院国家天文台 *中国科学院云南天文台 *中国科学院乌鲁木齐天文工作站 *中国科学院长春人造卫星观测站 *中国科学院南京天文光学技术研究所 中国科学院遥感应用研究所 中国科学院地质与地球物理研究所 中国科学院古脊椎动物与古人类研究所 中国科学院大气物理研究所 中国科学院植物研究所 中国科学院动物研究所 中国科学院心理研究所 中国科学院微生物研究所 中国科学院生物物理研究所 中国科学院遗传与发育生物学研究所 *中国科学院遗传与发育生物学研究所农业资源研究中心(原中国科学院石家庄农业资源研究所) 中国科学院计算技术研究所 中国科学院软件研究所 中国科学院半导体研究所 中国科学院微电子研究所 中国科学院电子学研究所 中国科学院自动化研究所 中国科学院电工研究所 中国科学院工程热物理研究所 中国科学院空间科学与应用研究中心 中国科学院自然科学史研究所 中国科学院科技政策与管理科学研究所 中国科学院光电研究院 北京基因组研究所 中国科学院青藏高原研究所 国家纳米科学中心 院直属事业单位(京外) 中国科学院山西煤炭化学研究所 中国科学院沈阳分院 中国科学院大连化学物理研究所 中国科学院金属研究所 中国科学院沈阳应用生态研究所 中国科学院沈阳自动化研究所 中国科学院海洋研究所 青岛生物能源与过程研究所(筹) 烟台海岸带可持续发展研究所(筹) 中国科学院长春分院 中国科学院长春光学精密机械与物理研究所 中国科学院长春应用化学研究所 中国科学院东北地理与农业生态研究所 *中国科学院东北地理与农业生态研究所农业技术中心(原中国科学院黑龙江农业现代化研究所) 中国科学院上海分院 中国科学院上海微系统与信息技术研究所 中国科学院上海技术物理研究所 中国科学院上海光学精密机械研究所 中国科学院上海硅酸盐研究所 中国科学院上海有机化学研究所 中国科学院上海应用物理研究所(原子核研究所) 中国科学院上海天文台 中国科学院上海生命科学院 *生物化学与细胞生物学研究所 *神经科学研究所 *药物研究所 *植物生理生态研究所 *国家基因研究中心 *健康科学研究中心 *中国科学院上海生命科学信息中心 *营养科学研究所 *中国科学院上海生物工程研究中心 中国科学院上海巴斯德研究所(筹) 中国科学院福建物质结构研究所 中国科学院城市环境研究所 中国科学院宁波材料技术与工程研究所(筹) 中国科学院南京分院 二、经验类 [quote]1:考中科院科大完全攻略! 普物类 力学科大出版社杨维宏很好的教材 电磁学高教社赵凯划经典教材(科大出版社的也不错) 热学高教社褚圣麟经典教材(科大出版社的也不错)已经出版了对照的习题解答 上述3门是普物a b的考试范围,弄清楚课后习题足够了! 电动力学郭硕鸿高教社已经出版了对照的习题解答 理论力学高教社已经出版了对照的习题解答 光学赵凯华北大出版社 量子类 量子力学卷1曾谨言科学出版社,最好同时购买习题集的上下册非常好搞清楚就足够了! 周世勋高教社《量子力学》入门型已经出版了对照的习题解答! 考科大、中科院的用这些足够了。还有哪些?大家提出我补充。现在资料更新很快,很多抖出了专门的习题集建议大家看最新的,00年以前的老掉牙的东西没什么用处了。 引用 2、各位朋友大家好:也谈中国科大物理辅导班笔记,物理教材! 我是科大研究生想告诉大家,不要太指望辅导班笔记。 看到不少人受到误导心痛不已,其实复习就是很简单的事情,很多教材的选择也就是基础常见的就足够了, 高教版的基本都是非常经典的还要习题集的选择电磁学力学等太多了,不过建议大家看一些比较新的资料。 老掉牙的就算了n年了,编这些书的老师估计早就退休了! 下面几个常见问题: 中国科大物理辅导班笔记,物理教材!(我觉得这个帖子很好) 1 辅导班何时开办? 每年的11月中旬,到12月20左右出来! 1 考科大用什么教材? 其实这个问题很简单了,当然最好是科大教材了,如果是科大习题集最好了,现在科大教材变化很快毫无疑问最好的教材就是最新的。多少年来变化很大的,但是科大教材不是好教材,力学其实复旦的比较好,科大yangweihong的觉得很一般,不过习题不错。电磁学毫无疑问是高教社的zhaokaihua的好啊,科大张玉民的也是很一般的教材。原子物理也是推荐高教社chushe nglin的很经典的教材。但是教材归教材,习题集最好还是选择科大这个道理很简单了 1 为什么考科大物理? 2科大物理国内一流国际闻名科大全公费住宿免费补助待遇每月500以上设备先进值得你去努力 2 外校能否报名? 不能,就是科大校内的学生也要凭借学生证,不是科大物理系的就很难接受。 3 辅导班笔记含金量多高? 辅导班笔记其实就是串讲班不叫辅导班,所以就是科大物理各门的大复习。知识点几乎面面据到! 4 市场上的辅导班笔记可信么? 这个我觉得还是大家自己判断为好。你相信外部人有么?自己决定! 5 给你辅导班笔记怎么判断真假? 首先要考虑对方可能会有么?如果可能有,对比一下是不是往年的笔记可信度多大?科大官方部不提供这个咨询服务。 6 如果没有辅导班笔记怎么复习? 扎扎实实的复习力学电磁学原子物理量子力学建议使用科大版本教材,道理很简单了。其实很多其他教材也不错,科大的很多教材很差不想想你想像的那么好! 引用 3、关于中科大中科院量子力学和普通物理考研试题的若干说明 热烈欢迎2008年考中科大中科院的同学们!!! 2008年考研的要提前准备才充分!!! 中国科学院的一些招生单位(包括物理所和高能所在内),在06年研究生入学考试抛弃了以前科大的命题,改由中科院研究生院命题。实际上就是由以前中科大的老师出题,变为中科院的研究机构的那些导师出题。(据了解,一些导师接到出题任务都很烦,因为科研压力大啊,出题就让自己带的研究生随便在习题集上 1H412010 测量技术 前言 本节的重点是:机电工程项目工程测量技术、起重技术、焊接技术,也是机电工程一级建造师必备的基本专业技术知识。 工程测量是指遵照施工图纸的要求,使用精密的测量仪器和工具,将工程项目的建(构)筑物、机电工程工艺生产线上的设备、系统管线等的坐标位置、几何形状、相关数据等准确地测量、放样到实地,并在施工全过程中进行测量控制。 本目重点是: 机电工程测量的方法; 测量的要求; 测量仪器的应用。 1H412011测量的方法 工程测量是按照设计和施工的要求将设计的建筑物、构筑物的平面位置和高程在地面上标定出来,作为施工的依据,并在施工过程中进行一系列的测量工作,以衔接和指导各工序之间的施工。 本条主要知识点是: 工程测量的目的和内容;工程测量的特点、工程测量的原则和要求;工程测量的基本原理及方法;工程测量的程序;竣工图的绘制;常见的机电工程中的测量。 一、工程测量的目的和内容 1. 工程测量的目的 (1) 工程测量的首要工作也是要做好控制点布测。工程测量包括对建(构)筑 物施工放样、建(构)筑物变形监测、工程竣工测量等,以保证将设计的建(构)筑物位置正确地测设到地面上,作为施工的依据。 (2) 工程测量贯穿于整个施工过程中。从场地平整、建筑物定位、基础施工、建筑物构件安装等,都需要进行工程测量,以使建筑物、构筑物各部分的尺寸、位置符合设计要求。 2.主要内容 (1) 建立施工控制网。 (2) 建筑物、构筑物的详细测设。 (3) 检查、验收。每道施工工序完工之后,都要通过测量检查工程各部位的实际位置及高程是否与设计要求相符合。 (4) 变形观测。随着施工的进展,测定建筑物在平面和高程方面产生的位移和沉降,收集整理各种变形资料,作为鉴定工程质量和验证工程设计、施工是否合理的依据。 二、工程测量的特点 与测图工作相比,具有如下特点:1.目的不同。测图工作是将地面上的地物、地貌测绘到图纸上,而工程测量是将图纸上设计的建筑物或构筑物测设到实地。 2.精度要求不同。工程测量的精度要求取决于工程的性质、规模、材料、施工方法等因素。 一般高层建筑物的工程测量精度要求高于低层建筑物的工程测量精度,钢结构工程测量精度要求高于钢筋混凝土结构的工程测量精度,装配式建筑物的工程测量精度要求高于非装配式建筑物的工程测量精度。 此外,由于建筑物、构筑物的各部位相对位置关系的精度要求较高,因而工程的细 部放样精度要求往往高于整体放样精度。 3 .工程测量工序与工程施工工序密切相关。 三、工程测量的原则和要求 一、工程测量的原理 (一)水准测量原理 ——水准测量原理:是利用水准仪和水准标尺,根据水平视线原理测定两点高差的测量方法。 ——利用水准仪和水准标尺测定待测点高程的方法:高差法和仪高法 1.高差法——采用水准仪和水准尺测定待测点与已知点之间的高差,通过计算得到待定点的高程的方法; 2.仪高法——采用水准仪和水准尺,只需计算一次水准仪的高程,就可以简便地测算几个前视点的高程。 请注意两种方法的应用选择: 当安置一次仪器,同时需要测出数个前视点的高程时,使用仪高法。(二)基准线测量方法 ——基准线测量原理:是利用经纬仪和检定钢尺,根据两点成一直线原理测定基准线。 ——测定待定位点的方法有: 水平角测量和竖直角测量,这是确定地面点位的基本方法。每两个点位都可连成一条直线(或基准线)。 切记: 1.保证量距精度的方法 返测丈量,当全段距离量完之后,尺端要调头,读数员互换,按同法进行返测,往返丈量一次为一测回,一般应测量两测回以上。 ——量距精度以两测回的差数与距离之比表示。 2.安装基准线的设置 安装基准线一般都是直线,只要定出两个基准中心点,就构成一条基准线。 ——平面安装基准线不少于纵横两条 3.安装标高基准点的设置 根据设备基础附近水准点,用水准仪测出的标志具体数值。 ——相邻安装基准点高差应在0.3 mm以内 (一)工程测量的程序 建筑安装或工业安装的测量,其基本程序是: (二)平面控制测量 1.平面控制测量的要求 (1)平面控制网建立的测量方法 ——三角测量法、导线测量法、三边测量法等。 (2)平面控制网的坐标系统,应满足测区内投影长度变形值不大于2.5cm/Km。 (3)三角测量的网(锁)布设,应符合下列要求: 各等级的首级控制网,宜布设为近似等边三角形的网(锁)。 其三角形的内角不应小于30°;当受地形限制时,个别角可放宽,但不应 小于25°。 2.平面控制网布设的方法 ——导线测量法和三边测量法 2)三边测量法的技术要求 各等级三边网的起始边至最远边之间的三角形个数不宜多于10个; 其三角形的内角不应小于30°;当受地形限制时,个别角可放宽,但不应 小于25°。 3) 平面控制网的基本精度 应使四等以下的各级平面控制网的最弱边边长中误差不大于0.1mm。 育明教育 2015年全国硕士研究生招生考试公告 根据《2015年全国硕士研究生招生工作管理规定》,现将2015年硕士研究生招生考试有关事项公告如下: 一、初试时间 2015年硕士研究生招生考试初试时间为:2014年12月27日至12月28日(每天上午8:30-11:30,下午14:00-17:00)。超过3小时的考试科目在12月29日进行(起始时间8:30,截止时间由招生单位确定,不超过14:30)。 考试时间以北京时间为准。不在规定日期举行的硕士研究生入学考试,国家一律不予承认。 二、初试科目 初试方式均为笔试。 12月27日上午思想政治理论、管理类联考综合能力 12月27日下午外国语 12月28日上午业务课一 12月28日下午业务课二 12月29日考试时间超过3小时的考试科目 每科考试时间一般为3小时;建筑设计等特殊科目考试时间最长不超过6小时。 详细考试时间、考试科目及有关要求等请见《准考证》。 三、报名要求 硕士研究生招生考试报名包括网上报名和现场确认两个阶段。所有参加2015年硕士研究生招生考试的考生均须进行网上报名,并到报考点现场确认网报信息、缴费和采集本人图像等相关电子信息。 应届本科毕业生原则上应选择就读学校所在省(区、市)的报考点办理网上报名和现场确认手续;单独考试及工商管理、公共管理、旅游管理和工程管理等专业学位的考生应选择招生单位所在地省级教育招生考试管理机构指定的报考点办理网上报名和现场确认手续;其他考生应选择工作或户口所在地省级教育招生考试管理机构指定的报考点办理网上报名和现场确认手续。 网上报名技术服务工作由全国高等学校学生信息咨询与就业指导中心负责。现场确认由省级教育招生考试管理机构负责组织相关报考点进行。 四、网上报名 (一)网上报名时间 2014年10月10日至10月31日,每天9:00-22:00。逾期不再补报,也不得再修改报名信息。 (二)网上预报名时间 2014年9月25日至9月28日,每天9:00-22:00。 (三)报名流程 考生登录“中国研究生招生信息网”(公网网址:https://www.doczj.com/doc/a73954607.html,,教育网址:https://www.doczj.com/doc/a73954607.html,,以下简称“研招网”)浏览报考须知,按教育部、省级教育招生考试管理机构、报考点以及报考招生单位的网上公告要求报名。 报名期间将对考生学历(学籍)信息进行网上校验,并在考生提交报名信息三天内反馈校验结果。考生可随时上网查看学历(学籍)校验结果。考生也可在报名前或报名期间自行登录“中国高等教育学生信息网”(网址: 2000,2001,2002年中科大与中科院量子力学试题2000年(实验型) 1. 在电子的双窄逢干涉理想实验中,什么结果完全不能用粒子性而必须用波动性来解释?为什么? 2. 一个质量为的粒子在势场中运动.设t=0时,其归一化波函数.求1)时,测量能量所得的几率性的结果;(2)>0时的含时波函数以及时测量能量的结果. 3. 设一维运动粒子的坐标和动量分别为和,c为常数.(1)求力学量和的对易关系.(2)若是算符的本征值,试证明也是的本征值. 4. 对于单个电子的运动1)证明轨道角动量算符和动量算符对易.(2)论答:运动于球对称场中束缚态的力学量完全集合是什么?(不计自旋)(3)设,用测不准关系估算其基态能量. 5. 设硼原子受到的微扰作用.在简并微扰一级近似下(1)论答:其价电子2p能级分裂为几个能级?(2)若已知其中一个能级移动值为A>0,则其余诸能级移动值各为多少?(3)求出各分裂能级对应的波函数(用原来的2p波函数表示) 2000年(理论型) 1一个质量为m的粒子被限制在一维区域运动.t=0时的波函数为其中A为常数. (1) 后来某一时刻t0的波函数是什么? (2) 体系在t=0和t=t0时的平均能量是多少? (3) 在t0时处于势井右半部分(即)发现粒子的几率是多少? 2氢原子的基态能量为,其中为波尔半径,m为折合质量. (1) 写出电子偶素(氢原子中质子由正电子代替)的基态能量和半径. (2) 由于电子有自旋,电子偶素的基态的简并度是多少?写出具有确定总自旋值的可能波函数以及相应的本征值. (3) 电子偶素的基态会发生衰变,湮灭为光子.这个过程中释放的能量和角动量是多少?证明终态至少有两个光子. 3设粒子处于状态,计算角动量的分量和分量的平均平方差, 4记为泡利矩阵。定义 (1)计算 (2)证明(为常数) (3)化简下面两式 5设为一量子体系的能量算符,其本征态为。若体系受到微扰作用,微扰算符为(为实数),为某一厄密算符,为另外的厄密算符,且。如在微扰作用前的基态中,的平均值为已知的。试对微扰后的基态(非简并)计算厄密算符的平均值,精确到量级。 6以和表示费米子体系的某个单粒子态的产生和湮灭算符,满足基本关系式。以表示该单粒子态上的粒子数算符,求的本征值,并计算两个对易式,。 2001年中国科技大学与中科院量子力学试题 2001年(实验型) 1设质量为的粒子在一维无限深势井中运动.试用的驻波条件,求粒子能量的可能取值. 2设质量为的粒子束沿正方向以能量向处的势垒运动,.试用量子力学观点回答:在处被发射的发射系数是多少? 3(1)在坐标表象中写出一维量子体系的坐标算符和动量算符,并推导出其间的对易关系.(2)在动量表象中做(1)所要求做的问题. 第一章、 对准、调焦 ? 对准、调焦的定义、目的; 1. 对准又称横向对准,是指一个对准目标与比较标志在垂直瞄准轴方向像的重合或置 中。目的:瞄准目标(打靶);精确定位、测量某些物理量(长度、角度度量)。 2、调焦又称纵向对准,是指一个目标像与比较标志在瞄准轴方向的重合。 目的: --使目标与基准标志位于垂直于瞄准轴方向的同一个面上,也就是使二者位于同一空间深度; --使物体(目标)成像清晰; --确定物面或其共轭像面的位置——定焦。 人眼调焦的方法及其误差构成; 清晰度法:以目标和标志同样清晰为准则; 消视差法:眼睛在垂直视轴方向上左右摆动,以看不出目标和标志有相对横 移为准则。可将纵向调焦转变为横向对准。 清晰度法误差源:几何焦深、物理焦深; 消视差法误差源:人眼对准误差; 几何焦深:人眼观察目标时,目标像不一定能准确落在视网膜上。但只要目标上一点在视网膜上生成的弥散斑直径小于眼睛的分辨极限,人眼仍会把该弥散斑认为是一个点,即认为成像清晰。由此所带来的调焦误差,称为几何焦深。 物理焦深:光波因眼瞳发生衍射,即使假定为理想成像,视网膜上的像点也不再是一个几何点,而是一个艾里斑。若物点沿轴向移动Δl 后,眼瞳面上产生的波像差小于λ/K(常取K=6),此时人眼仍分辨不出视网膜上的衍射图像有什么变化。 (清晰度)人眼调焦扩展不确定度: (消视差法)人眼调焦扩展不确定度: 人眼摆动距离为b ,所选对准扩展不确定度为δe , ? 对准误差、调焦误差的表示方法; 对准:人眼、望远系统用张角表示;显微系统用物方垂轴偏离量表示; 调焦:人眼、望远系统用视度表示;显微系统用目标与标志轴向间距表示 ? 常用的对准方式; φ'= = 12111e e l l D αφ'=-= 22 2 1 118e l l K D λφ'= - = e b δφ'= 全站仪测量原理 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 全站仪:即全站型电子测距仪(Electronic Total Station),是一种集光、机、电为一体的高技术测量仪器,是集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统。与光学经纬仪比较电子经纬仪将光学度盘换为光电扫描度盘,将人工光学测微读数代之以自动记录和显示读数,使测角操作简单化,且可避免读数误差的产生。因其一次安置仪器就可完成该测站上全部测量工作,所以称之为全站仪。广泛用于地上大型建筑和地下隧道施工等精密工程测量或变形监测领域。 最初速测仪的距离测量是通过光学方法来实现的,我们称这种速测仪为“光学速测仪”。实际上,“光学速测仪”就是指带有视距丝的经纬仪,被测点的平面位置由方向测量及光学视距来确定,而高程则是用三角测量方法来确定的。 随着电子测距技术的出现,大大地推动了速测仪的发展。用电磁波测距仪代替光学视距经纬仪,使得测程更大、测量时间更短、精度更高。人们将距离由电磁波测距仪测定的速测仪笼统地称之为“电子速测仪”(Electronic Tachymeter)。然而,随着电子测角技术的出现。这一“电子速测仪”的概念又相应地发生了变化,根据测角方法的不同分为半站型电子速测仪和全站型电子速测仪。半站型电子速测仪是指用光学方法测角的电子速测仪,也有 称之为“测距经纬仪”。这种速测仪出现较早,并且进行了不断的改进,可将光学角度读数通过键盘输入到测距仪,对斜距进行化算,最后得出平距、高差、方向角和坐标差,这些结果都可自动地传输到外部存储器中。全站型电子速测仪则是由电子测角、电子测距、电子计算和数据存储单元等组成的三维坐标测量系统,测量结果能自动显示,并能与外围设备交换信息的多功能测量仪器。由于全站型电子速测仪较完善地实现了测量和处理过程的电子化和一体化,所以人们也通常称之为全站型电子速测仪或简称全站仪。 1全站仪的测量原理 全站仪是一种集光、机、电为一体的高技术测量仪器,是集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统。它的基本测量原理是电子测距技术和电子测角技术。 1.1 电子测距技术 电子测距的基本原理是利用电磁波在空气中传播的速度为已知这一特性,测定电磁波在被测距离上往返传播的时间来求得距离值。但是,这种直接测距的方法实现起来非常困难,当我们要求较高的测量精度时,对测量时间的要求很高,这在实践过程中是非常困难的。因此,在实际的测距过程中可以根据此原理采取改进的方法进行测距。在实际过程中主要用两种方法,脉冲法和相位法。 1) 脉冲法:测距使用的光源为激光器,它发射一束极窄的光脉冲射向目标,同时输出一电脉冲信号,打开电子门让标准频率发生器产生的时标脉冲通过并对其进行计数。光脉冲被目 中国科学院研究生院 2015年招收硕士学位研究生入学统一考试试题 科目名称:量子力学(811) 考生须知: 1.本试卷满分为150分,全部考试时间总计为180分钟。所有的答案必须写在答题纸上,写在试题纸上或草稿纸上一律无效。 一、一个质量为μ的粒子在一个一维的盒匣()0x L <<里自由运动,波函数()x ψ满足条件()()()() 0'0'L L ψψψψ==,1)求系统的能级 2)将第一激发态写成归一化动量本征态的组合形式,并给出当p <>为0时,组合系数满足的条件 二、一个三维简谐振子受到微扰() 22'H xyz x y y x λ=++的作用,试用微扰论求系统的基态能量,并精确到2λ量级。三、两个粒子的自旋分别为12,s s ,相对取向为n ,设两个粒子的相互作用为 ()()1212=3H s n s n s s ××-×,记12s s s =+,证明: 1)2212s 3=24s s ×-?,()()()2 2121=24s n s n s n ×××-?2)[]0 H s =,四、一个质量为μ的粒子在势场(){ 0 0 x V x Bx x ¥£=>中运动1)用变分法求基态的能量可以选取下列的哪个作为近似波函数,并说明理由a)/x a e -,b)/x a xe -,c)/1x a e --() a 为变分参数 2)用所选的近似波函数求基态能量。 五、一个二能级系统,哈密顿量为: ()()01020=0 E H E éùêúêú??()()() 0012E E <当0t =,系统处于基态,当0t >时,开始受到的微扰0'=0H λλéùêúêú?? 1)求0t >时,系统跃迁到激发态的概率()02 ()E P t (精确值) 2)用含时微扰论重求上题的概率,与精确值对比,指出结果成立的条件。 LIDAR的技术原理以及在测绘中的应用 朱士才 (江苏省测绘工程院南京 210013) 摘要:LIDAR是一种集激光、全球定位系统(GPS)和惯性导航系统(INS)三种新技术于一身的系统,用于获得高精度、高密度 的三维坐标数据,并构建目标物的三维立体模型。该技术在基础测绘 DEM、DOM、DLG生产、精密工程测量、数字城市建设等领域具有 广泛的应用前景,它代表了测绘技术又一个新时代的到来,。 关键词:LIDAR 数字高程模型测绘 一、LIDAR的技术原理 1、前言 激光雷达技术是根据英文Light Detection And Ranging 的翻译而命名的专业术语,简称为LiDAR。该技术可以实现空间三维坐标的同步、快速、精确地获取,并根据实时摄影的数码像片,通过计算机重构来实现大型实体或场景目标的3D数据模型,再现客观事物的实时的、真实的形态特性,为快速获取空间信息提供了简单有效手段。因此被有些专家称为,继GPS以来在测绘领域的又一个技术革命。 根据载体的不同,LiDAR技术主要分地面三维激光扫描技术和机载激光雷达扫描技术两大类,目前这两类系统在国内外都得到了成功的运用。 顾名思义,地面三维激光扫描系统的空间载体是地面,类似于传统的地面近景摄影测量。它将激光扫描仪直接与数码相机、GPS相结合,对目标物进行扫描成像,获取激光反射回波数据和目标表面影像,并在软件支持下构建三维数字模型和纹理的精确贴加,从而达到目标物快速、有效、精确的三维立体建模。经过改装,地面三维激光扫描系统不但可以安置在固定设备上,也可以装载在运动的汽车上,进行连续的三维场景和目标形态的空间数据采集。 机载激光雷达系统则是一款高速度、高性能、长距离的航空测量设备,该系统由激光测高仪、GPS定位装置、IMU(Inertial Measurement Unit,惯性制导仪)和高分辨率数码照相机组成,实现对目标物的同步测量。测量数据通过特定方程解算处理,生成高密度的三维激光点云数值,为地形信息的提取提供精确的数据源。与地面LiDAR技术相比,机载LiDAR更适合于大规模、大范围的测绘作业。 2、LiDAR的测量原理 我们知道,与普通光波相比,激光具有方向性好、单色性好、相干性好等特点,不易受大气环境和太阳光线的影响。使用激光进行距离量测可大大提高了数工程测量原理与方法
811《量子力学》 - 中国科学院
中国科学院大气物理研究所
工程测量原理与方法
全国研究所代码 (标准)
光学测量原理与技术
中国科学院理化技术研究所科研物资采购管理暂行办法
1测量技术讲解
中国科学院大气物理研究所
中科院各大研究所
中科院-科大真题最完整版+考试攻略
1测量技术讲解
测量原理
2014年中国科学院量子力学考研真题及答案解析
2000,2001,2002年中科大与中科院量子力学试题
光学测量原理与技术
全站仪测量原理【详解】
中科院2015考研量子力学(811)真题.pdf
LIDAR的技术原理以及在测绘中的应用
相关主题
文本预览