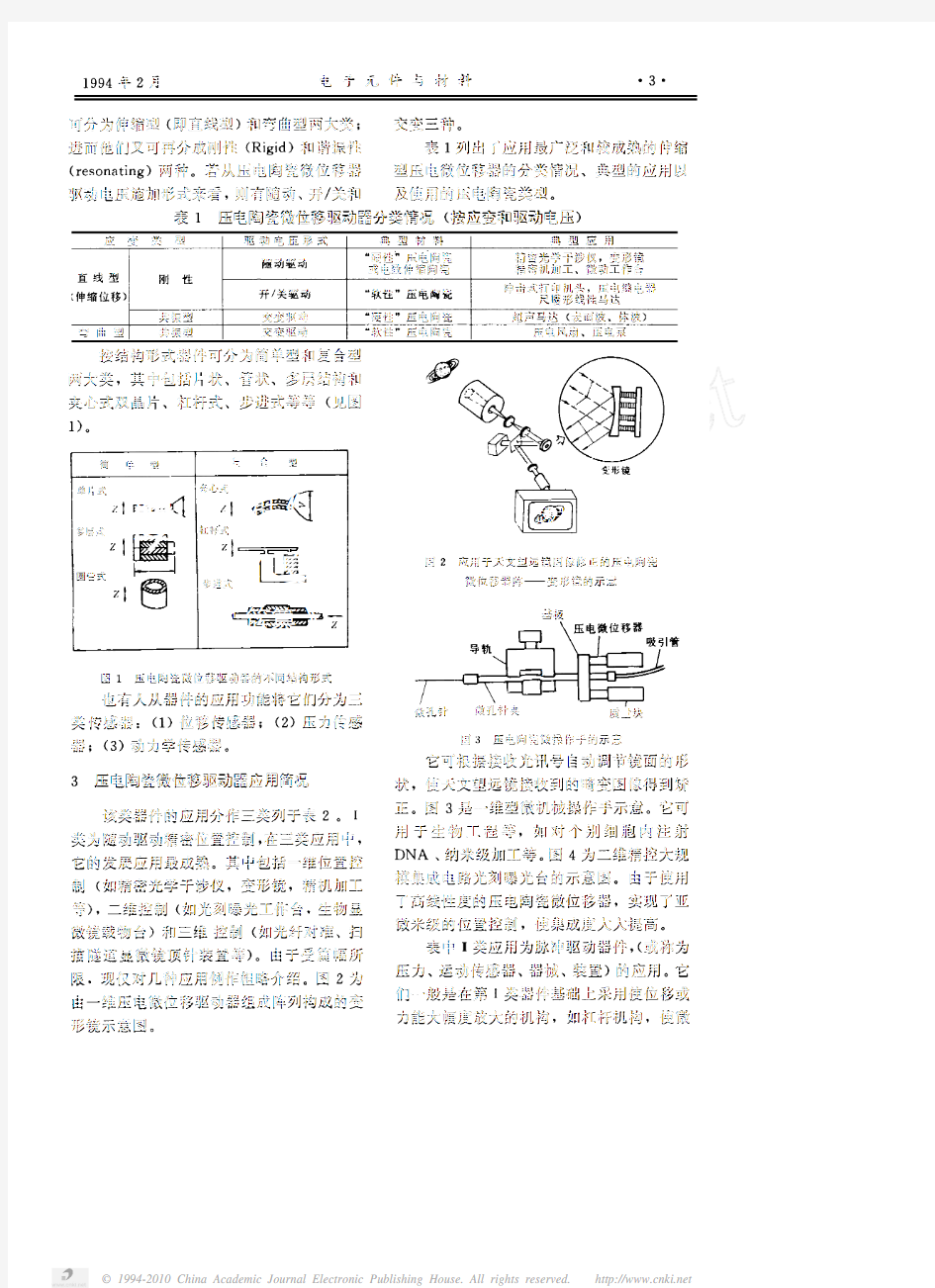
微位移执行器是精密驱动系统的末端执行环节,由驱动元件(致动器)和微位 移传递机构二部分组成。目前,微位移驱动元件种类很多,如机电驱动类、电磁 驱动类、压电/电致伸缩驱动类、磁致伸缩驱动类等。从控制精度和可操作性分 析,压电陶瓷驱动器以其体积小、分辨率高、响应快和推力大等特点有其独特的 优点,但它的输出位移小,尤其在需要较高频响场合位移输出幅度受到了很大的 限制,故目前主要应用在加工中的误差补偿、微量进给和精密调整等场合。 压电陶瓷驱动器(PzT)具有体积小、分辨率高及承载能力强等优点,使用Pzr 控制简单,易实现亚微米甚至纳米级的精度,且不产生热量和噪声。 2.2.1 压电陶瓷微位移器的原理、特点及应用 压电陶瓷微位移器是由多层压电陶瓷薄片,经过多层叠层技术制成的固态移动器,它能直接将电能转换成动能(机械位移)。压电驱动的工作原理是基于压电体具有逆压电效应: 即当压电体受电场作用时会产生形变。与其他形式的驱动相比,压电驱动具有的 最大特点和优点是为微米、纳米量级的位移或运动提供了新手段和新途径。同时, 压电驱动具有控制方便、位移分辨率高、频率响应好、不发热、推力大、无噪声、 外界干扰小等优点。但压电陶瓷本身存在着非线性、迟滞、蠕变等缺点,需要通 过一些措施来改变和补偿。压电驱动具有很大的发展前途,大多应用在高技术 领域,如光纤光学定位,自适应光学,生物工程细胞穿制,精密微定位,摄影, 摄像器材快门控制,光纤熔接机等。 2.2.2 电致伸缩陶瓷微位移器(以WTDS型为例) WTDS电致伸缩微位移器是由PLZT陶瓷材料(在电场作用下,该材料晶格定位引起介电驰豫而发生形变),经叠层工艺制作而成的。它是一种高分辨电压控制微小应变的器件。其位移量是由叠层数和电场大小控制的。它具有工作电压低、分辨率高、响应快、滞后小、回零再现性好、无老化现象、稳定性好等突出优点。它是光学、机械加工、电子、航空、生物、医学、遗传工程和光纤通讯等领域中实现超精定位、超精加工、误差补偿、相位调制等功能的理想执行器件。该器件定位精度可达亚微米级,分辨率可达到几十纳米。
微小位移量检测系统设计 魏仲慧 1,张文新1,2,何昕1 (1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033 2.中国科学院研究生院 北京 100039) 摘 要: 介绍了基于激光三角测量法的微小位移量检测原理,并依据这个原理,设计了以一 维PSD 为检测元件,以FPGA 为时序逻辑控制部件,以AT89S51单片机为运算核心的微小位移量检测系统。 关键词: PSD ,信号处理 , 微小位移 中图分类号:TN24 文献标识码:A The Design of Small Displacement Test System Wei,Zhonghui 1, Zhang,Wenxin 1,2, He,Xin 1 (1.Changchun Institute of Optics, Fine Mechanics and Physics, JiLin Changchun 130033 2. Graduate School of the Chinese Academy of Science, Beijing 100039) Abstract: In this paper, the test principle of small displacement is introduced based on laser triangulation technique. According to this principle, we design the test system of small displacement . One-dimensional PSD is the test component , FPGA is the control component of timer and logic, and AT89S51 is the operation core. Key words: PSD , Signal processing , Small displacement 0 引 言 随着科学技术水平和工业生产的不断发展,微小位移量的检测在表面测量、材料测量、精密机械测量等众多应用领域起着越来越重要的作用。检测微小位移量,可以采用接触式测量法和非接触式测量法。传统的接触式测量方法有很多局限性,如无法精确测量软质材料的高精度表面,测量结果受环境因素影响很大等,因此,接触式测量方法很难实现对微小位移量的高精度检测;非接触式的测量方法,由于在检测过程中不与待测物体直接接触,因此避免了上述问题对检测结果的影响。利用非接触测量方法构成的检测系统结构简单,测量精度高,目前应用广泛。 本文首先介绍了微小位移量的检测原理,并依据此原理,设计了以一维PSD 为检测元件,以FPGA 为时序逻辑控制部件,以AT89S51单片机为运算核心的微小位移量检测系统。 1 检测原理 对于微小位移量的检测,是基于激光三角测量法原理。检测原理如图所示: 光源发出的光经过透镜L 1聚焦,投射到被测物体表面上,形成光强分布均匀的光斑,一部 分反射光经成像物镜L 2成像到位置敏感探测器(PSD )受光面上。当被测物体向上或者向光源 PSD
毕业论文文献综述 机械设计制造及其自动化 圆弧形柔性铰链式二维并联压电微动平台的设计 1、前言 以柔性铰链为导向机构的超高精度微动工作台已被广泛用于能束加工、超精密检测、微操作系统等要求具有纳米级定位分辨率的技术领域中。随着纳米技术研究的深入发展, 高分辨率、宽行程、高频响的微动工作台越来越成为研究开发的热点和难点。随着科技的发展, 各类精密、超精密仪器仪表, 如图形发生器、分步重复照相机、光刻机、电子束和X射线及其检测设备等被广泛地应用于科学研究和现实生活中[3~5]。与此同时, 相配套的各类精密、超精密微动平台也应运而生。微动系统一般由微动平台、检测装置、控制系统3 部分组成。 2、微动平台简介 微动平台,或称为微位移机构,是指行程小(一般小于mm 级)、灵敏度和精度高的机构, 它是微动系统的核心。微动工作台主要由微位移驱动器、导轨和输出平台等组成。微位移驱动器直接把输入电压/电流转变成相应的输出位移, 而导轨则把此位移量传递到工作台。 3、压电陶瓷简介 由于压电陶瓷驱动器具有高刚度、高分辨率、无摩擦和磨损以及响应速度快等优点, 因而在纳米级的微定位装置中得到广泛应用。系统采用压电陶瓷微位移驱动器, 它是一种固体器件, 易与电源、位移传感器、微机等实现闭环控制, 无需传动机构, 具有位移精度高, 响应速度快, 功耗低等特点, 被广泛应用于微动平台的设计中。 压电效应的概念最先来源于压电晶体,当此类电介质晶体外加机械载荷时,晶体内部的正负电荷中心发生相对位移而产生极化,导致晶体两端出现符号相反的束缚电荷。反之,如将具有压电效应的电介质晶体置于电场中,由于电场的作用而引起电介质晶体内部正负电荷中心产生相对位移,致使压电晶体发生形变,晶体的这种现象称为逆压电效应。 在工程技术中应用较普遍的是由压电陶瓷材料制作而成的压电元件。通常选用压电常数较大的层叠式压电元件获取微变形,它的线性比较优良,且具有体积小、刚度大、形变相对较大、位移分辨率高和响应迅速的特点。 4、国内外研究现状
压电陶瓷微位移器件性能分析 我国1426所在80年代研制出的WTDS-I型电致伸缩微位移器在国内许多研究部门得到应用,但生产单位没有及时对该器件的迟滞、蠕变、温度特性,尤其是动态特性进行必要的研究。作者根据本文的研究需要,对国内应用该产品的情况进行了大量调研和实验研究,从而获得了一些有关该产品性能的情况,现介绍如下: 一、迟滞及蠕变特性 图5.9是作者测得的WTDS-I电致伸缩微位移器的电压 位移实验曲线。从实验中发现,在高压段,微位移器出现蠕变现象,即在一定电压下,位移达到一定值后随时间缓慢变化,在较长的时间内达到稳定值,这一现象是微位移器内部电介质在电场作用下的极化驰豫造成的。图5.10是在300伏时,微位移器位移随时间的变化曲线。 二、温度特性 原航空航天部303所对WTDS-I型电致伸缩微位移器的温度特性进行了测试。图5.11是在一定电压下,微位移器的伸长量与温度的关系曲线,当温度低于0℃或超过20℃时,伸长量变小。 三、压力特性 在作者的要求下1426所对WTDS-I型电致伸缩微位移器的压力特性作了实验,图5.12是实验曲线,该曲线表示在某一电压下器件伸长量(不包括器件因受力而产生的压缩量)与压力的关系,△S表示在某一压力下的伸长量,S0表示空载时的伸长量,303所也做了这一实验,其结果相同。从图中可以看出:压力对位移量的影响不大。 四、刚度特性 刚度是指器件本身抵抗外力而产生变形的能力。哈尔滨工业大学机械系对WTDS-IB型电致伸缩微位移器件作了这方面的实验。图5.13是刚度特性曲线,在不加电压的情况下,得到的器件压缩量与压力的关系。压缩量—力回归关系式为: S = 0.155F + 2.96 其中S—器件的压缩量(μm) , F—施加外力 (N) 其相关系数为:r = 0.988 刚度为: 6.45(N/μm) 从图5.13中可以看出:在载荷较小时压缩量随载荷的加大而增加较快,而在载荷较大时压缩量随载荷的加大而增加较慢,且基本呈直线关系增加。这主要是 由于器件的叠堆结构造成的,叠堆是由多 片压电陶瓷薄片粘接而成,各薄片间的接 触刚度较差,随外力的增加,由于接触变 形使接触面积增大,刚度提高,因而出现 了如图5.13所示的压缩量与载荷的关系曲 线。 图5.14为在不同压力下的电压—位移曲线。从图中可以看出,微位器的位移随载荷的增加而减小,但电压—位移关系曲线的基本形状不变。
微位移传感器(D-KB-50) 微位移传感器(D-KB-50) 产品简介 D-KB-50光栅测微传感器,是以高精度光栅作为检测元件的精密测量装置。与数显表配套,组成高精度数字化测量仪器。可以代替机械式千分表、扭簧比较仪、深度尺、电感测位移和精密量块,配以适当的转换器,可将温度、压力、硬度、重量等参数转换为数字量。用于自动化大生产中在线监测及精密仪器的位置检测。其优点是测量值数字化显示,精度高,稳定可靠,读数直观准确。亦可把测量数据输入计算机打印出测量数据或绘出曲线。 一、主要技术参数: 1.测量范围:0~10、0~20、0~30、0~40、0~50(mm)
2.栅距:10um(100对线/毫米),20um(50X寸线/毫米) 3.显示分辨率:0.5um,5um,1um 4.准确度:±1um,±2um 5.重复精度:±1个显示值 6.输出信号:相位依次相差90°幅值大于500mv二路或四路脉冲信号,无绝对参考零位 7.光源:红外发光二极管 8.接收元件:组合光电二极管 9.工作温度:0℃~40℃ 10.储存温度:-20℃~70℃ 11.外形尺寸:长*宽*厚=L*42*22(mm),L0测杆伸出长度。 二、使用安装 光栅测微传感器主要用于高精度测量。使用时除保证环境条件外,正确的安装与使用不仅保证测量精度,还能延长使用寿命。光栅测微传感器正确安装位置是测杆朝下或水平放置。安装固定方式有两种:①以螺钉固定,固定孔中心距为22±0.2mm.②以①15轴夹紧。安装固定后,测杆中心线垂直于被测工件。 使用时,测头接触基面,数显表清零,轻轻提起测杆,当测头接触被测工件表面时,数显表显示值就是测量值。切忌快推或快速释放测杆,以免损坏光栅或因撞击影响传感器精度。 三、故障分析处理 1.光栅测微传感器与数显表对接后,数显表不显示。故障原因: ①电源未接通(保险丝熔断)②传感器输出插头与数显表插座接触不良:上述检查仍不能排除故障,应检查数显表电路或送厂家检修。 2.接通电源数显表工作正常,推动测杆,数显表现显示不进位。故障原因:检查传感器有无输出信号,若无输出信号属传感器内部故障,送厂家检修, 3.数显表进位正常,显示数字频频闪动。故障原因: ①检查输出信号幅值是否过低(一般幅值大于500mv) ②用示波器检查输出信号波形与相位是否正确,若不正确属传感器内部故障,送厂家检修。 ③检查屏蔽线接地是否良好。 公司名称 威海迪控电子科技有限公司
第!"卷!第"期#$$%年&月!!!!!!!!!!!光学精密工程!’()*+,-./012+*,*3.4.5*.221*.5!!!!!!!!6378!"!938"!!: ;.8#$$%!!收稿日期! #$$%<$#<$&"修订日期!#$$%<$=#=O ##$$%$$"<$#>!<$P 新型压电步进型精密直线驱动器 刘国嵩!赵宏伟!曾平!程光明!杨志刚 "吉林大学机械科学与工程学院!吉林长春!"$$#%# 摘要!以压电叠堆为驱动元件&设计了新型的步进型精密直线驱动器’驱动器由于设计了独特的双侧对称箝位结构&可以利用精调斜块准确调整箝位面与动子的配合间隙&同时采用整体加工的柔性结构&保证了工作的稳定性和准确性’应用有限元分析方法对步进型精密直线驱动器进行了力学分析&并进行了大量的试验研究’试验测试结果表明(驱动器的分辨率达到=$.@)行程!?@@) 驱动速度达到&@@*@*.&可牵引!%$5的载荷’ 关!键!词!直线驱动器!压电叠堆!柔性铰链!精密驱动!有限元分析 中图分类号!J B P $"8&"J 9"?=!!文献标识码!R O .;-46.9,1601230->60-991$8 41$-3/91-E .-4-20/12320=30./I Q D A ;3<,3.5&e B R ’B 3.5
位移传感器又称为线性传感器,是一种属于金属感应的线性器件,传感器的作用是把各种被测物理量转换为电量。在生产过程中,位移的测量一般分为测量实物尺寸和机械位移两种。按被测变量变换的形式不同,位移传感器可分为模拟式和数字式两种。模拟式又可分为物性型和结构型两种。 位移传感器的主要分类 根据运动方式 直线位移传感器: 直线位移传感器的功能在于把直线机械位移量转换成电信号。 为了达到这一效果,通常将可变电阻滑轨定置在传感器的固定部位,通过滑片在滑轨上的位移来测量不同的阻值。传感器滑轨连接稳态直流电压,允许流过微安培的小电流,滑片和始端之间的电压,与滑片移动的长度成正比。将传感器用作分压器可最大限度降低对滑轨总阻值精确性的要求,因为由温度变化引起的阻值变化不会影响到测量结果。 角度位移传感器: 角度位移传感器应用于障碍处理:使用角度传感器来控制你的轮子可以间接的发现障碍物。原理非常简单:如果马达角度传感器构造运转,而齿轮不转,说明你的机器已经被障碍物给挡住了。此技术使用起来非常简单,而且非常有效;唯一要求就是运动的轮子不能在地
板上打滑(或者说打滑次数太多),否则你将无法检测到障碍物。一个空转的齿轮连接到马达上就可以避免这个问题,这个轮子不是由马达驱动而是通过装置的运动带动它:在驱动轮旋转的过程中,如果惰轮停止了,说明你碰到障碍物了。 根据材质 电位器式位移传感器:它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。图1中的电位器式位移传感器的可动电刷与被测物体相连。物体的位移引起电位器移动端的电阻变化。阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。通常在电位器上通以电源电压,以把电阻变化转换为电压输出。线绕式电位器由于其电刷移动时电阻以匝电阻为阶梯而变化,其输出特性亦呈阶梯形。如果这种位移传感器在伺服系统中用作位移反馈元件,则过大的阶跃电压会引起系统振荡。因此在电位器的制作中应尽量减小每匝的电阻值。电位器式传感器的另一个主要缺点是易磨损。它的优点是:结构简单,输出信号大,使用方便,价格低廉。 霍耳式位移传感器:它的测量原理是保持霍耳元件(见半导体磁敏元件)的激励电流不变,并使其在一个梯度均匀的磁场中移动,则所移动的位移正比于输出的霍耳电势。磁场梯度越大,灵敏度越高;
微位移技术第一章概论 第二章微位移机构 第三章柔性铰链
第一章概论 作为精密机械与精密仪器的关键技术之一一微位移技术,近年来随着微电子技术、宇航、生物工程等学科的发展而迅速的发展起来。例如用金刚石车刀直接车削大型天文望远镜的抛物面反射镜时,要求加工出几何精度高于l/l0光波波长的表面,即几何形状误差小于0.5u m。计算机外围设备中大容量磁鼓和磁盘的制造,为保证磁头与磁盘在工作过程中维持1um内的浮动气隙,就必须严格控制磁盘或磁鼓在高速回转下的跳动。特别是到20世纪70年代后期,微电子技术向大规模集成电路和超大规模集成电路方向发展,随着集成度的提高,线条越来越微细化。256K动态RAM线宽已缩小到1.25um左右,目前己小于0.1um,对与之相应的工艺设备(如图形发生器、分步重复照相机、光刻机、电子束和X射线曝光机及其检测设备等)提出了更高的要求,要求这些设备的定位精度为线宽的1/3~1/5,即亚微米甚至纳米级的精度。 生物工程是当今一门崭新的学科,现代科学的发展要求,随意捕捉和释放单一游离细胞,或向细胞内注入和拾取某一成份,同时还能测定和记录细胞生物的电参数,因此研制满足这一要求的设备同样离不开微位移技术。随着机器人技术的发展,机器人精微操作已成为机器人研究领域中的重要课题之一,如用机器人完成精密伺服阀,压电陀螺等精密零部件的装配作业,其技术关键之一是微位移技术的研究.[1]因此,微位移技术是现代工业基础的重要组成部分,它几乎左右着上述各领域的发展,并引起国内外研究人员的极大关注,他们加紧了这方面的研究,并取得了很大进展。由于定位技术的水平几乎影响着整个设备的性能,因此直接影响到微电子、宇航、生物工程等高科技技术的发展。例如精密仪器,无论是大行程的精密定位,还是小范围内的光学对准,都离不开微位移技术。因此微位移技术,成为现代精密仪器工业的共同基础。 1.1国内外现状及发展趋势 美国LLN以美国知名核聚变实验室)研制的加工大口径光学元件的金刚石车床(LODTM)是目前世界上能进行最高精度切削加工的车床,其所用的快速刀具伺服机构采用了PZT(错钦酸铅压电陶瓷),能在士1.27um范围内分辨力达到2.5nm,频率响应可达到IOOHz;日本日立制作所采用柔性支承导轨、压电晶体驱动方式的微位移机构的位移精度为士0.05um,行程为士8um,该机构已成功应用于电子束曝光机;中国国防科技大学采用柔性支承导轨、电致伸缩驱动方式的微位移机构的分辨力为0.01um,行程为20um[4]。现将收集的具体资料列于下表1-1
2008年7月第4卷第3期 系统仿真技术 SystemSimulationTechnology Jul..2008 V01.4.No.3 中图分类号:’rM282文献标识码:A 基于虚拟仪器的压电微位移驱动器线性化研究 秦文罡,陈志超,吴威,高爱华 (西安工业大学光电工程学院,陕西西安710032) 摘要:根据压电陶瓷的非线性特性,提出了一种采用离散电压标定和控制压电微位移驱动器线性化的方法。利用数模输出卡,输出不同步长的单个的离散电压,控制压电陶瓷伸长的速度,从而达到利用选取的电压值参数来控制压电陶瓷伸长速度的目的。选取恰当的电压值,可以使得压电驱动器在时间域上线性地伸长而达到线性化。设计基于Labview的控制系统,并对线性化方法进行了原理分析和实验。实验结果表明,该系统可以有效地在0~300V范围内使压电微位移驱动器的∞#量与时间成线性关系,定位精度为1]tim。 关键词:压电驱动器;线性化;虚拟仪器 ResearchonLinearizatiOnOfPiezOeIeCtriCActuator BasedonVirtuallnStrUment QlNWengang.CHENZhichao.WUWei,GAOAihua (SchoolofOptoeleetronieEngineering,Xi’allTechnologicalUniversity,Xi’all710032,China) Abstract:Accordingtothe piezoelectricactuator’Snonlinearcharacteristic,amethod of piezoelectricac— tuator’Slinearizationbasedondiscretepointofvoltageispresented.Byusingthedigital—to—analog(DA) outputcard,outputsinglevoltagewhichindifferentinterval.Inthisway,thespeedofpiezoelectricce-ramic’Selongationcanbecontrolledbytheoutputvoltages.Itcanbeelongatedlinearlyinthetimefield withthespecial voltagesadoptedbefore.Inordertotestthemethod,anexperimentalcontrolsystemandprogramisdesigned.Theexperimentshowsthatthesystemiseffectivetolinearizethepiezoelectricce-ramicintherangeof0—300V,andthesuperiorityincludinglowcostwithuniversalcomponentandhighpositioningaccuracywith1hill. Keywords:piezoelectricactuator;linearization;virtualinstrument 1引言 压电微位移驱动器是一种利用压电陶瓷逆压电效应制作的微位移器,广泛应用在微机电系统、超精密加工、微电子、光电子和生物工程等前沿学 基金项目:陕西省重点实验室开放基金资助项目 (ZSⅪ200703)科领域。但是,由于压电陶瓷自身电压与伸缩量问的非线性,即不满足S=扭线性关系[1。],给驱动器精确定位带来误差,使驱动器转换信号失真。降低了其控制精度。因此必须采取适当措施,控制其非线性。由于现在各种牌号的压电陶瓷特性曲线各不相同,快速方便地对其进行线性化校正非常必要。用传统的方式制作的驱动电源∞再】,由于数据存储在电可擦写可编程只读存储器中, 万方数据
先进功能材料课程论文 学院:材料学院 专业:材料学 学号:11S009078 姓名:鲁明 2012年5月20日
压电材料驱动器研究进展 鲁明 11S009078 摘要:作为新型功能材料驱动器家族中的重要成员,压电陶瓷在工业生产和日常生活中得到了广泛的应用。由压电陶瓷构成的精度高、控制方便、能耗低的驱动器,在精密伺服控制系统中具有独特的技术优势。详细阐明了压电驱动器的独特优点,概述了其结构类型与应用分类。在此基础上,综述了该驱动器研究与应用中的若干热点以及未来的发展趋势。 关键词:压电驱动器;精密控制;应用 简介: 压电驱动器以其尺寸小、线性好、控制方便、位移分辨率高、频率响应好、能耗低、无噪声等特点,己成为一种理想的微位移驱动装置,非常适合在精密定位及小负载、大转矩、高精度的机械传动装置等领域中应用。Et本的M.Asano,T.Matsuoka等人应用8块压电陶瓷片通过变换驱动时序和相位研制成了针型驱动器[1]。这种驱动器主要用来作为微型管道机器人的动力源。它可以实现精确的位移(0.5微米),并有很快的移动速度(103mm/s),其最大驱动力是0.02256N。德国Karlsrule大学用压电驱动器作为驱动单元研制成功的定位机器人[2],可实现三自由度的运动,其运动精度为5nm。美国加利福尼亚大学R.S.Feairng 等人结合仿生学原理,研制了用于微飞行昆虫的振翅压电微驱动器[3]。该驱动器最大速度为0.9mm/s,最大步长为36m,最小步长0.142m。近年来,日本东京理工大学的JamesFirend 等人研制了体积为4mm×3mm×8.5mm的旋转振动压电微驱动器[4],在87.1mN负载下,最大输出转矩0.1N·m。国内许多高校和科研机构也做了应用研究工作,但研究成果尚未实用化。 一结构类型 按驱动方式不同,压电驱动器可分为刚性位移驱动器和谐振位移驱动器。 刚性位移驱动器的驱动模式主要有多层式驱动器和单(双)晶片驱动器,此外还有Rainbow驱动器、Moonie驱动器和Cymbals驱动器等,几种模式在大小、质量、位移量及负载能力上均各有特点。 多层片式陶瓷驱动器(MLAS)是利用单片陶瓷电场作用下直接伸长变形,再通过多层叠加使总的变形量达到一个较大的数值。MLAS具有承载力大、响应快、位移可重复性好、体积效率高、电场控制相对简单等优点,缺点是位移量较小、电容高。 D33双晶片弯曲驱动器是由两片相同的沿厚度方向极化过的压电陶瓷片粘结在一起形成的,结构如图l所示。d单晶片弯曲驱动器结构与双晶片不同之处只是由金属代替了其中的一片陶瓷。将弯曲驱动器一端固定,构成悬臂梁结构,沿z轴方向施加电场,驱动器自由端发生弯曲变形[5]。 D33单晶片弯曲驱动器结构如图2所示。其中导电环氧树脂既起到电连结作用,又提高了驱动器的断裂韧性,从而使驱动器能承受很大的弯曲应力而没有机械损坏。d双晶片弯曲驱动器是用同样的压电陶瓷体代替了图2中的金属板。由于常用压电陶瓷的d值是d的2~2.2倍,所以这种结构的驱动器在相同电场强度作用时产生的位移量比d33弯曲驱动器要高得多。
位移传感器 一、简介 位移传感器又称为线性传感器,是一种属于金属感应的线性器件,传感器的作用是把各种被测物理量转换为电量。在生产过程中,位移的测量一般分为测量实物尺寸和机械位移两种。按被测变量变换的形式不同,位移传感器可分为模拟式和数字式两种。模拟式又可分为物性型和结构型两种。常用位移传感器以模拟式结构型居多,包括电位器式位移传感器、电感式位移传感器、自整角机、电容式位移传感器、电涡流式位移传感器、霍尔式位移传感器等。数字式位移传感器的一个重要优点是便于将信号直接送入计算机系统。这种传感器发展迅速,应用日益广泛。位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。 二、工作原理 电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。电位器式位移传感器的可动电刷与被测物体相连。 物体的位移引起电位器移动端的电阻变化。阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。通常在电位器上通以电源电压,以把电阻变化转换为电压输出。线绕式电位器由于其电刷移动时电阻以匝电阻为阶梯而变化,其输出特性亦呈阶梯形。如果这种位移传感器在伺服系统中用作位移反馈元件,则过大的阶跃电压会引起系统振荡。因此在电位器的制作中应尽量减小每匝的电阻值。电位器式传感器的另一个主要缺点是易磨损。它的优点是:结构简单,输出信号大,使用方便,价格低廉。
压电陶瓷应用研究进展 程院莲,鲍 鸿,李 军,李小亚 (广东工业大学自动化学院,广东广州510090) 摘 要:阐述了压电陶瓷在振子、换能器及光电等方面的应用及近年来所取得的最新成果;给出了具体的最新应用实例。 关键词:压电陶瓷;超声换能器;压电驱动器 中图分类号:TN712+ 5 文献标识码:A 文章编号:1672-4984(2005)02-0012-03 Research progress in applications of piezoelectric ceramic C HENG Yuan -lian,BAO Hong,LI Jun,LI Xiao -ya (College of Automation,Guangdong University of Technology,Guangzhou 510090,China) Abstract:The applications to the aspects such as piezoelectric resonators ,piezoelectric transducer,photo devices,and the newest research outcomes made in the recent years are expounded,some newest application examples are also given Key words:Piezoelectric ceramic;Ultrasonic transducer;Piezoactuator 收稿日期:2004-06-09;收到修改稿日期:2004-08-17基金项目:广东省教育厅科研基金项目资助(030058)作者简介:程院莲(1978-),女,硕士研究生,主要从事检测技术与自动化装置研究。 1 引 言 压电陶瓷是一种能够将机械能和电能互相转换的功能陶瓷材料,它具有压电效应。所谓压电效应是指由应力诱导出极化(或电场),或由电场诱导出应力(或应变)的现象,前者为正压电效应,后者为负压电效应,两者统称为压电效应。目前为止,压电陶瓷的这种压电效应已被应用到与人们生活密切相关的许多领域,遍及工业、军事、医疗卫生、日常生活等。可见压电陶瓷应用的研究意义非常重大。随着新工艺和新材料的出现,压电陶瓷应用日新月异,本文描述了一些压电陶瓷新应用成果。 2 压电陶瓷的广泛应用 压电陶瓷的应用十分广泛。大体说来,可分为频率控制、换能传感和光电器件等方面。2 1 压电陶瓷频率控制器件 压电频率控制器件有滤波器、谐振器和延迟线等,这类器件使用于道倍机、微机、彩电延迟电路等中。压电陶瓷片(压电振子)在外加交变电压作用下,会产生一定频率的机械振动。在一般情况下这种振动的振幅很小,但是当所加电压的频率与压电 振子的固有机械振动频率相同时会引起共振,振幅 大大增加。这时,交变电场通过逆压电效应产生应变,而应变又通过正压电效应产生电流,电能和机械能最大限度地互相转换,形成振荡。利用压电振子这一特点,可以制造各种滤波器、谐振器等,其频率稳定性好,精度高,适用频率范围宽,体积小,不吸潮,寿命长,特别是在多路通信设备中能提高抗干扰性,所以目前已取代了相当大一部份电磁振荡器和滤波器,而且这一趋势还在不断发展中。2 2 压电换能器及传感器 压电陶瓷在交变电场作用下,会产生伸缩振动,从而向介质中发射声波。当交变电场的频率与压电陶瓷的固有机械频率相近时会产生共振,它能发出很强的超声波振动。因而可利用所产生的高强度超声波来改变物质的性质和状态,如超声清洗、超声乳化以及制作各种超声切割器、焊接装置及烙铁,对塑料甚至金属进行加工等。压电晶体产生的超声波在介质中传播,遇到障碍物时,大部分声能被折回形成回波,回波再被压电晶体接收转变成电信号,电信号的幅度与给定频率下的声信号的幅度成比例。根据此电信号的各种参量,可以进行超声医疗,对金属进行无损探测以及探测水下物体等。其中把声能转换为电能的换能器叫作接收器或水听器;把电能转换为声能的换能器叫作发射器。声纳就是这方面的一个广泛应用,有些声纳用同一只换能器来发射和接收声音;另一些则使用分开的发射器和水听器。其 第31卷第2期 2005年3月中国测试技术 C HINA MEASUREME NT TECHNOLOGY Vol 31 No 2Mar,2005
《传感器原理及应用》课程 考核论文 题目电感式微位移传感器分析及应用实例 班级 学号 姓名 成绩 机械与汽车工程学院机械电子工程系 二零一四年五月
目录 摘要 2 引言 2 一、电感式传感器组成及原理 3 二、电感测头的结构11 三、差动变压器应用11 四、电感式微位移传感器应用实例12 参考文献23
电感式微位移传感器分析及应用实例 摘要:随着现代制造业的规模逐渐扩大,自动化程度愈来愈高。要保证产品质量,对产品的检测和 质量管理都提出了更高的要求。电感式微位移传感器是一种分辨率极高、工作可靠、使用寿命很长的测 量仪器,应用于微位移测量已有比较长的历史. 本文主要对电感式微位移传感器进行了系统性分析,阐 述了其物理效应、构成、结构、测量电路、显示装置等基本内容,并在网上对此传感器进行了选型,结 合其产品手册/使用说明书,详细说明了此传感器的用法,并进行了举例说明。 关键词: 电感式传感器,相敏检波,零点残余电压 Abstract:With modern manufacturing scale expands gradually, more and more high degree of automation. To ensure the quality of product, the product testing and quality management are put forward higher requirements. Inductive micrometer is a kind of extremely high resolution, reliable operation, long service life measuring instrument, used in the micro displacement measurement has a long history. This article mainly has carried on the systematic analysis to inductance displacement of weak, expounds the physical effect, composition, structure, measuring circuit, display device, the basic content, and for the selection of this sensor on the net,
摘要 微动平台的机构优化及其超精运动控制技术,是目前微/纳制造领域中的研究热点之一,具有广阔的应用前景。为此,本文在优化设计基于柔性铰链的二维微动平台本体结构,并分析其静/动力学性能的基础上,以高性能ATmega128微控制器为中心测控单元,PA85为功率放大模块,结合传统的PID控制技术,研发了一套数字式的二维微动平台驱动控制系统,并实现了系统的集成。研究的主要工作如下: 首先,提出了一个由压电陶瓷驱动器、柔性铰链平台机构、衍射光栅位移传感器和微控制器构成的二维微动平台的总体设计方案;并在此基础上设计了一个综合杠杆放大和柔性铰链机构的二维低耦合微动平台结构,其运动放大比为5,工作行程为100μm×100μm。然后,采用通用有限元软件ANSYS对优化后的平台进行了静力、动态特性和瞬态响应分析,验证了所设计二维平台的运动传递、静态和动态力学特性。 其次,针对二维微动平台的超精密控制要求,研制了由ATmega128微控制器、ADS8325模数转换模块、DAC8564数模转换模块组成的控制系统的硬件部分;并编制了微控制器与AD、DA模块进行SPI通讯以及与上位机串行通讯的接口程序,实现了PID控制运算模型;采用负反馈线性电压放大电路,将控制信号进行电压与功率放大后驱动压电陶瓷,进而控制微动平台运动。 最后,组装了二维微动实验平台,并进行了0.625Hz、5Hz、10Hz和20Hz的谐波轨迹的跟随实验,验证了论文所设计的二维低耦合微动平台及其控制系统的有效性和运动跟随性能。 关键词:微动平台;柔性铰链;ATmega128微控制器;控制
ABSTRACT Micro motion stage is one of the most hot research fields with broad prospect, of which the key technology is its mechanism and precision positioning control. The mechanism of a two-dimensional nano-manipulator is optimized and its static and dynamic performances are analyzed with FEM in ANSYS. Hence, the driving control system for this nano-positioning stage is developed and the integrated experimental platform is realized, applying ATmega128 as its central control unit and PA85 as power amplify unit and combining with the traditional PID control technology. The contents of this dissertation as below: First of all, the thesis proposes the overall scheme of the nano-positioning stage and designs a low coupling two-dimensional nano-manipulator having flexure hinges and lever mechanisms with magnifying ratio 5, of which the working stroke is 100μm×100μm. Besides, FEM analysis of the optimized nano-manipulator in ANSYS were performed to verify the parasitic motion suppressing effects and guarantee the work stoke in limited workspace, as while as its statistic and dynamic response characteristics. Moreover, for the precision positioning control of the nano-positioning stage, the thesis develops its hardware of this control system, consisting of ATmega128 MCU, ADS8325 A/D module, DAC8564 D/A module. Furthermore, the compiling of the SPI communication between the MCU and A/D, D/A module is realized, as while as the calculate model of PID control. The design adopts negative feedback high-voltage amplifier circuit to amplify control signal to drive the piezo actuator, so that the nano-manipulator can be positioned. Finally, based on the assembly experimental platform, the effectiveness and performance of the low coupling nano-positioning stage and its driving control system is verified through the experiment of tracking 0.625Hz, 5Hz, 10Hz and 20Hz harmonic signal. Key words: nano-positioning stage; flexure hinge; ATmega128 micro controller; control