
第二章
2.1 判断下列序列是否是周期序列。若是,请确定它的最小周期。 (1)x(n)=Acos(6
85ππ+n ) (2)x(n)=)8(
π-n
e j
(3)x(n)=Asin(3
43π
π+n )
解 (1)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),得出=ω85π。因此5
16
2=ωπ是有理数,所以是周期序列。最小周期等于N=
)5(165
16
取k k =。 (2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。因此πωπ162=是无理数,所以不是周期序列。
(3)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π3
43π
π-n )
=Acos(6
143-n π),得出=ω43π。因此38
2=ωπ是有理数,所以是周期序列。最小周期等于N=
)3(83
8
取k k =
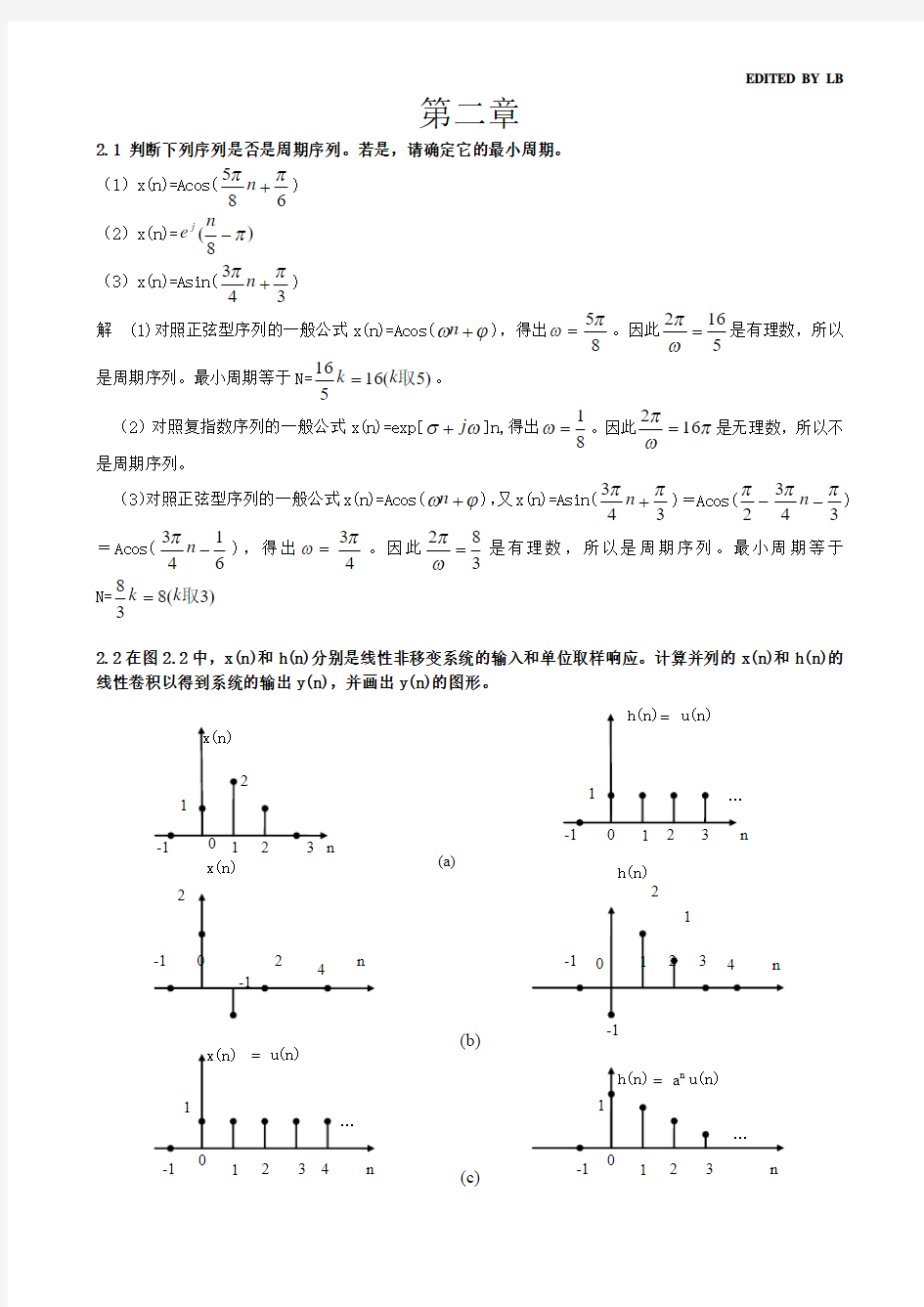
2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
(a)
1
11
1
(b)
(c)
11
1
11
0 0
-1-1
-1
-1
-1
-1
-1
-1
2
2
2
22
2 3
3
3
3
34
44
…
…
…n
n
n n
n
n
x(n)x(n)
x(n)
h(n)h(n)
h(n)2
1
u(n)
u(n)
u(n)a n ===2
2
解 利用线性卷积公式
y(n)=
∑∞
-∞
=-k k n h k x )()(
按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。 (a) y(0)=x(O)h(0)=1
y(l)=x(O)h(1)+x(1)h(O)=3
y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1)
h(n)=-δ(n)+2δ(n-1)+ δ(n-2)
y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)=
∑∞
-∞
=--k k
n k n u k u a
)()(=
∑∞
-∞
=-k k
n a
=a
a n --+111
u(n)
2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λ
n
u(n)*u(n)
解:(1) y(n)=
∑∞
-∞=-k k n u k u )()(
=
∑∞
=-0
)()(k k n u k u =(n+1),n ≥0
即y(n)=(n+1)u(n) (2) y(n)=∑∞
-∞=-k k k n u k u )()(λ
=∑∞
=-0
)()(k k
k n u k u λ
=λ
λ--+111
n ,n ≥0
即
y(n)=λ
λ--+111
n u(n)
2.4 图P2.4所示的是单位取样响应分别为h 1(n)和h 2(n)的两个线性非移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a n u(n),|a|<1,求系统的输出y(n).
解 ω(n)=x(n)*h 1(n) =
∑∞
-∞
=k k u )([δ(n-k)-δ(n-k-4)]
=u(n)-u(n-4)
y(n)=ω(n)*h 2(n) =
∑∞
-∞=k k
k u a )([u(n-k)-u(n-k-4)]
=∑∞
-=3
n k k
a
,n ≥3
2.5 已知一个线性非移变系统的单位取样响应为h(n)=a
n
-u(-n),0 系统的单位阶跃响应。 2.6 试证明线性卷积满足交换率、结合率和加法分配率。 证明(1)交换律 X(n) * y(n) = ∑∞ -∞ =- k k n y k x) ( ) ( 令k=n-t,所以t=n-k,又-∞ ` x(n) * y(n) =∑∞ -∞ = - - - t t n n y t n x)] ( [ ) ( =∑∞ -∞ =- t t y t n x)( ) (=y(n) * x(n) 交换律得证. (2)结合律 [x(n) * y(n)] * z(n) =[∑∞ -∞ =- k k n y k x) ( ) (] * z(n) =∑∞ -∞ =t [∑∞ -∞ = - k k t y k x) ( ) (]z(n-t) =∑∞ -∞ = k x(k) ∑∞ -∞ =t y(t-k)z(n-t) =∑∞ -∞ = k x(k) ∑ m y(m)z(n-k-m) =∑∞ -∞ = k x(k)[y(n-k) * z(n-k)] =x(n) * [y(n) * z(n)] 结合律得证. (3)加法分配律 x(n) * [y(n) + z(n)] = ∑∞ -∞ = k x(k)[y(n - k) +z(n - k)] =∑∞ -∞ = k x(k)y(n-k)+ ∑∞ -∞ = k x(k)z(n - k) =x(n) * y(n) + x(n) *z(n) 加法分配律得证. 2.7 判断下列系统是否为线性系统、非线性系统、稳定系统、因果系统。并加以证明 (1)y(n)= 2x(n)+3 (2)y(n)= x(n)sin[ 32πn+6 π] (3)y(n)= ∑∞-∞ =k k x )( (4)y(n)= ∑=n n k k x 0 )( (5)y(n)= x(n)g(n) 解 (1)设y 1(n)=2x 1(n)+3,y 2(n)=2x 2(n)+3,由于 y(n)=2[x 1(n)+x 2(n)]+3 ≠y 1(n)+ y 2(n) =2[x 1(n)+x 2(n)]+6 故系统不是线性系统。 由于y(n-k)=2x(n-k)+3,T[x(n-k)]=2x(n-k)+3,因而 y(n-k) = T[x(n-k)] 故该系统是非移变系统。 设|x(n)|≤M ,则有 |y(n)|=|2x(n)+3|≤|2M+3|<∞ 故该系统是稳定系统。 因y(n)只取决于现在和过去的输入x(n),不取决于未来的输入,故该系统是因果系统。 (2)设 y 1(n)=ax 1(n)sin[ 3 2π n+6π] y 2(n)=bx 2(n)sin[3 2π n +6π] 由于 y(n)=T[ax 1(n)+ bx 2(n)] =[ax 1(n)+bx 2(n)]sin[3 2π n+6π] =ax 1(n)sin[ 32πn+6π]+bx 2(n)sin[3 2πn+6π ] =ay 1(n)+by 2(n) 故该系统是线性系统。 由于 y(n-k)=x(n-k)sin[ 3 2π (n-k)+6π] T[x(n-k)]=x(n-k)sin[3 2π n+6π] 因而有 T[x(n-k)]≠y(n-k) 帮该系统是移变系统。 设 |x(n)|≤M ,则有 |y(n)|=|x(n)sin[ 3 2π (n-k)+6π]| =|x(n)|| sin[3 2π (n-k)+6π]| ≤M|sin[ 3 2π (n- k)+6π]|≤M 故系统是稳定系统。 因y(n)只取决于现在和过去的输入x(n),不取决于未来的输入,故该系统是因果系统。 (3)设 y 1(n)= ∑-∞ =n k k x )(1 ,y 2(n)=∑-∞ =n k k x )(2 ,由于 y(n)=T[ax 1(n)+ bx 2(n)]= ∑-∞ =+n k k k )](bx )(ax [2 1 =a ∑-∞ =n k k x )(1 + b ∑-∞ =n k k x )(2 =ay 1(n)+by 2 (n) 故该系统是线性系统。 因 y(n-k)= ∑--∞ =t n k k x )(= ∑-∞ =-n m t m x )( =T[x(n-t)] 所以该系统是非移变系统。 设 x(n)=M<∞ y(n)= ∑-∞ =n k M =∞,所以该系统是不稳定系统。 因y(n)只取决于现在和过去的输入x(n),不取决于未来的输入,故该系统是因果系统。 (4)设 y 1(n)= ∑=n n k k x 0 1 )( ,y 2(n)=∑=n n k k x 0 2 )(,由于 y(n)=T[ax 1(n)+ bx 2(n)]= ∑=+n n k k k 0 2 1 )](bx )(ax [ = a ∑=n n k k x 0 1 )(+b ∑=n n k k x 0 2 )(=ay 1(n)+by 2 (n) 故该系统是线性系统。 因 y(n-k)= ∑-=t n n k k x 0 )(= ∑+=-n t n m t m x 0)( ≠T[x(n-t)]= ∑=-n n k t m x 0 )( 所以该系统是移变系统。 设x(n)=M,则lim n →∞ y(n)= lim n →∞ (n-n 0)M=∞,所以该系统不是稳定系统。 显而易见,若n ≥n 0。则该系统是因果系统;若n y(n)=T[ax 1(n)+bx 2(n)]=(ax 1(n)+bx 2(n))g(n) =ax 1(n)g(n)+b 2(n)=ay 1(n)+by 2(n) 故系统是线性系统。 因y(n-k)=x(n-k),而 T[x(n-k)]=x(n-k)g(n)≠y(n-k) 所以系统是移变系统。 设|x(n)|≤M<∞,则有 |y(n)|=|x(n)g(n)|=M|g(n)| 所以当g(n)有限时该系统是稳定系统。 因y(n)只取决于现在和过去的输入x(n),不取决于本来的输入,故该系统是因果系统。 2.8 讨论下列各线性非移变系统的因果性和稳定性 (1)h(n)=2n u(-n) (4) h(n)=(12 )n u(n) (2) h(n)=-a n u(-n-1) (5) h(n)= 1 n u(n) (3) h(n)=δ(n+n 0), n 0≥0 (6) h(n)= 2n R n u(n) 解 (1)因为在n<0时,h(n)= 2n ≠0,故该系统不是因果系统。 因为S= n ∞ =-∞ ∑ |h(n)|= n ∞ =∑ |2n |=1<∞,故该系统是稳定系统。 (2) 因为在n n ∞ =-∞ ∑|h(n)|= 1 n -=-∞ ∑| a n |= n ∞ =∞ ∑ a n -,故该系统只有在|a|>1时才是稳定系统。 (3) 因为在n n ∞ =-∞∑|h(n)|= n ∞ =-∞ ∑ |δ(n+n 0)|=1<∞,故该系统是稳定系统。 (4) 因为在n n ∞=-∞ ∑ |h(n)|= n ∞=∑ |( 12 )n |<∞,故该系统是稳定系统。 (5) 因为在n 1 n u(n)=0,故该系统是因果系统 。 因为S= n ∞ =-∞ ∑|h(n)|= n ∞ =-∞ ∑ |1n u(n)|= 0 n ∞ =∑1n =∞,故该系统不是稳定系统。 (6) 因为在n n ∞ =-∞ ∑ |h(n)|= 1 N n -=∑ |2n |=2N -1<∞,故该系统是稳定系统。 2.9 已知y(n)-2cosβy(n-1)+y(n-2)=0,且y(0)=0,y(1)=1,求证y(n)=sin() sin nβ β 证明题给齐次差分方程的特征方程为 α2-2cosβ·α+1=0 由特征方程求得特征根 α 1 =cosβ+jsinβ=e jβ,α2=cosβ-jsinβ= e jβ-齐次差分方程的通解为 y(n)=c 1α 1 n+c 2 α 2 n=c 1 e j nβ+c 2 e j nβ - 代入初始条件得 y(0)=c 1+c 2 =0 y(1)= c 1e j nβ+c 2 e j nβ -=1 由上两式得到 c 1= 1 j n j n e e ββ - - = 1 2sinβ ,c 2 =- c 1 =- 1 2sinβ 将c 1和c 2 代入通解公式,最后得到 y(n) =c 1 e j nβ+c 2 e j nβ -= 1 2sinβ ( e j nβ+ e j nβ -)= sin() sin n β β 2.10 已知y(n)+2αy(n-1)+β(n-2)=0,且y(0)=0,y(1)=3,y(2)=6,y(3)=36,求y(n) 解首先由初始条件求出方程中得系数a和b 由 (2)2(1)(0)660 (3)2(2)(1)361230 y ay by a y ay by a b ++=+= ? ? ++=++=? 可求出a=-1,b=-8 于是原方程为 y(n)-2y(n-1)-iy(n-2)=0 由特征方程α2-2α-8=0求得特征根α 1 =4 ,α2=-2 齐次差分方程得通解为 y(n)=c 1α 1 n+c 2 α 2 n= c 1 4n+c 2 (-2n) 代入初始条件得 y(n)= c 1α 1 +c 2 α 2 = 4α1+2α2=3 由上二式得到 c 1= 12,c 2=-12 将c 1和c 2代入通解公式,最后得到 y(n)=c 1α 1 n +c 2α 2 n = 12 [4n -(-2) n ] 2.11 用特征根法和递推法求解下列差分方程: y(n)-y(n-1)-y(n-2)=0,且y(0)=1,y(1)=1 解 由特征方程α 2 -α-1=0求得特征根 α1= 15 2 +,α2= 15 2 - 通解为y(n)=c 1α1 n +c 2α 2 n =c 1( 152+)n +c 2(152 -)n 代入初始条件得 12121 1515 ( )()122 c c c c +=?? ?+-+=?? 求出 c 1= 1525+,c 2=15 25 - 最后得到通解 y(n)= c 1( 1525+)n + c 2(1525 -)n = 15[(1525+)1n +-(1525 -)1n +] 2.12 一系统的框图如图P2.12所示,试求该系统的单位取样响应h(n)和单位阶跃响应 解 由图可知 + x -1 ? x(n) y(n)=x(n)+ βy(n-1) 为求单位取样响应,令x(n)=δ(n),于是有 h(n)= δ(n)+ βh(n-1) 由此得到 h(n)= () 1n D δβ-=βn u(n) 阶跃响应为 y(n)=h(n)*u(n)= n k =∑ βk y(k)u(n-k) =111n ββ +--u(n) 2.13 设序列x(n)的傅立叶变换为X(e jw ),求下列各序列的傅立叶变换 解 (1)F[ax 1(n)+bx 2(n)]=aX 1(e jw )+bX 2(e jw ) (2)F[x(n-k)]=e jwk -X(e jw ) (3)F[e 0jw n x(n)]=X[e 0() j w w -] (4)F[x(-n)]=X(e jw -) (5)F[x * (n)]=X * (e jw -) (6)F[x * (-n)]= X * (e jw ) (7) (8)jIm[x(n)]=1 2 [X(e jw )-X *(e jw -)] (9) 1 2π X(e j θ)*X(e jw ) (10)j ()jw dx e dw 2.14 设一个因果的线性非移变系统由下列差分方程描述 y(n)-12y(n-1)=x(n)+ 1 2 x(n-1) (1) 求该系统的单位取样响应h(n) (2) 用(1)得到的结果求输入为x(n)=e jwn 时系统的响应 (3) 求系统的频率响应 (4) 求系统对输入x(n)=cos(2πn+4 π )的响应 解 (1)令X (n )=δ(n),得到 h(n)-h(n-1)/2=δ(n)+ δ(n-1)/2 由于是因果的线性非移变系统,故由上式得出 h(n)=h(n-1)/2+δ(n)+ δ(n-1)/2 ,n ≥0 递推计算出 h(-1)=0 h(0)=h(-1)/2+δ(0)=1 h(1)=h(0)/2+1/2=1 h(2)=h(1)/2=1/2 h(3)=2 1h(2)=(2 1)2 h(4)= 21h(2)=(21)3 . . . h(n)=δ(n)+ (2 1)n-1u(n-1) 或 h(n)= (2 1)n [u(n)-u(n-1)] 也可将差分方程用单位延迟算子表示成 (1-D)h(n)=(1+D)δ(n) 由此得到 h(n)=[(1+2 1D)/(1-2 1D)]δ(n) =[1+D+2 1D 2+ (2 1)2 D 3+…+(2 1)k-1 D 3+…] δ(n) =δ(n)+ δ(n-1)+ 2 1δ(n-2)+2 1δ(n-3)+... +(2 1)k-1δ(n-1)+… =δ(n)+ (2 1)n u(n-1) 2)将jwn e n X =)(代入)(*)()(n h n x n y =得到 [ ] ()jw jw jwn jw n jw jwn n n jwn jwn e e e e e e D D D D e D D n D D e n y ------+=-+ =?? ??????????+??? ??+????+??? ??+++=-+ =-+ =21121121121212112 11211)(2 11211*)(11 322δ (3)由(2)得出 () jw jw jw e e e H ---+= 2 11211 (4)由(3)可知 12 112112121 2=-+=???? ??--w j w j w j e e e H ? ? ? ??-=??????--??????+=??????? ????? ??--21arctan 2211arctan 211arctan arg 222π πj j w j e e e H 故: ()()()[] ? ?? ?????? ??-+=? ? ? ???++=21arctan 242 cos arg 42cos ππππn e H n e H n y jw jw 2.15 某一因果线性非移变系统由下列差分方程描述 y(n)-ay(n-1)=x(n)-bx(n-1) 试确定能使系统成为全通系统的b 值(b ≠a ),所谓全通系统是指其频率响应的模为与频率ω无关的常数的系统。 解:令 x(n)= (n),则 h(n)=ah(n-1)=(n)-b8(n-1) 或 h(n)=ah(n-1)+ (n)- (n-1),n ≥0 由于是线性的非移变系统,故对上式递推计算得出: h(-1)=0 h(0)=1 h(1)=ah(0)-b (0)=a-b h(2)=ah(1)=-ab h(3)=ah(2)= - b h(n)=ah(n-1)= -b,n ≥0 h(n)= u(n)-bu(n-1) 或系统的频率特性为 H( )= = = = 振幅的特性平方 = = = = 若选取a =*1b 或b =*1a ,则有|H(e jw )|2=|b|2 ,即幅度响应等于与频率响应无关的常数,故该 系统为全通系统。 2.16 (1)一个线性非移变系统的单位冲激响应为h(n)=a n u(n),其中a 为实数,且0 β n u(n), β为实数,且0<β<1.试利用线性卷积计算系统的输出y(n),并将结果写成下列形式 y(n)=(k 1a n +k 2β n )u(n) (2)分别计算x(n)、h(n)和(1)中求得的y(n)的傅立叶变换X(e jw )、H(e jw )、Y(e jw ),并证明 Y(e jw )=H(e jw )X(e jw ) 解 (1)y(n)= ∑∞ -∞=-k k n x k h )()( = ∑∞ -∞ =--k k k n u k u a )()(1β =∑∞ -∞ =--k k a )(11 ββ=1 1111] )(1[-+----αβαββn =-1111+---n ααββ+1 1 11----βαβ β,n ≥0 y(n)=( n αβα-1-n ββ β -1)u(n) (2)X(iw e )=ωγβi n e -∞ =∑0=-ω βj e --11 H(e ω j )=ωγαi n e -∞ =∑0= ω αj e --11 Y(e ω j )=∑∞ =--- -0 )( n j n n e ωββ αβαβ αα = βα-1(ω ααj e --1-n j e ββαβω--) 由于 βα-1(ωααj e --1-ω ββj e --1) = ) 1)(1(1 ωωβαj j e e ----=X(e ωj )H(e ωj ) 故得出 Y(e jw )=H(e jw )X(e jw ) 2.17 令x(n)和X(e jw )分别表示一个序号及其傅立叶变换,证明: **1()()()()2n jw jw n n x n x n X e X e dx π +∞ -=-∞ = ∑ ? 此式是帕塞瓦尔(Parseval )定理的一种形式。 证明:证法一 ??∑?∑?∑∑∑???∑∑?∑ ∑?∑ ∑∑- - ∞ -∞ =--∞ -∞=- -∞ -∞=∞ -∞ =∞ -∞ =----- - -∞ -∞ =∞ -∞ =- ∞ -∞ =∞ -∞ =--∞ -∞ =-∞ =-∞ =-= = ===? ? ? ??≠=--==--=-= = = ==π π π π π π π π πππ π π π π π π π π ππππ ππππ ππ dw e X e X dw e n x e X dw e e X n x dw e e X n x n x n x n x n x dw e X e X m n m n e e m n dw m n ejw dw e n x m x dw e n x e m x dw e X e X e n x e N x e X e n x e X jw jw n jwn jw jwn jw n jwn jw n n n jw jw m n jw m n jw m n jw n m m n jw jwn jw jw n jwn n jwn jw n jwn jwn )(*)(21)() (*21 ])(*21 [ )(] )(21 [ )() (*)() (*)()(*)(21,....0,.... 2)(21) (*) (])(*][)([ 21 )(*)(21)(**))(*( )(*)()() ()()(证法二: 其中 2.18 当需要对带限模拟信号滤波时,经常采用数字滤波器,如图P2.18所示,图中T 表示取样周期,假设T 很小,足以防止混叠失真,把从x α(t)到y α(t)的整个系统等效成一个模拟滤波器。 (1)如果数字滤波器h (n )的截止频率ω等于8πrad ,1 T =10kHz ,求整个系统的截止频率ac f ,并求出理想低通滤波器的截止频率c f (2)对 1 T =20kHz ,重复(1)的计算 解 理想低通滤波器的截止频率T π (弧度/秒)折合成数字域频率为π(弧度),它比数字滤波器h (n )的截止频率8π(弧度)要大,故整个系统的截止频率由数字滤波器h(n)的截止频率8 π (弧度)来决定。将 其换算成实际频率,即将s f = 1 T =10000Hz 带入28ac s f f ππ=,便得到 ac f =625 Hz 理想低通滤波器的截止频率 T π(弧度/秒)换算成实际频率使得到c f ,即由T π =2πc f ,得到 ac f =12T =100002 =500 Hz 2.19 求下列序列的Z 变换和收敛域 (1)δ(n -m ) (2)1()()2 n u n (3)a n u(-n-1) (4)1()[()(10)]2 n u n u n -- (5)cos(0n ω)u(n) 解:(1)X(z)=∑∞ z m n )(-δn =z -nm 当m>0时,x(n)是因果序列,收敛域为0<|z |≤∞,无零点,极点为0(m 阶); 当m<0时,x(n)是逆因果序列,收敛域为0≤|z |≤∞,零点为0(m 阶),无极点; 当m=0, X(z)=1,收敛域为0≤|z |≤∞,既无零点,也无极点 (2)X(z)=∑∞ ∞=-n n ? ? ? ??21u(n)z -n =∑∞=0 n n z ??? ??-121=12 111--z X(n)是右边序列,它的Z 变换的收敛域是半径为R -x 的圆的外部区域,这里 R -x =lim ∞ →n ) () 1(n x n x +=21 τ(n )还是因果序列,可以有|z |=∞,故收敛域为 2 1 <|z |≤∞。零点为0,极点 为 2 1。 X(n)还是因果序列,可以有|z |=∞,故收敛域为21<|z |≤∞。零点为0,极点为2 1。(3)x(z)= n n n z u u a -∞ ∞ =--∑)1(= n n az )(1 1 ∑-∞ -=- = n n z a )(1 1 ∑-∞ -=-=n n az )(1 1∑∞=-=z a z a 111---=1 11---az X(n)是左边序列,它的Z 变换的收敛域是半径围x R +的圆的内部区域,这里 x R +=|))1(()(|lim +--∞ →n x n x n = ||) 1(lim +--∞ →n n n a a =||a )(n x 还是逆因果序列,可以有0||=z ,故收敛域为||||0a z ≤≤零点为0,极点为a 。 (4)X(z)= ∑ ∞ ∞=-n n ?? ? ??21[]10)-u(n -u(n)z -n =∑ =9 n n ?? ? ??21 z -n =110 )2(1)2(1----z z X(n)是有限长序列,且它的Z 变换只有负幂项,故收敛域为0<|z |≤∞.零点为0和2 1 (10 阶),极点为2 1 。 (5)z z e e z n u n w z X n n jw n jw n n ∑∑∞ ∞ =--∞ -∞ =+== 00)()cos()(0 =n jw n z e )(21100-∞ =∑+)(2 11 00--∞=∑z e jw n = )1111(211100----+-z e z e jw jw =2 010 1cos 21cos 1---+--z w z w z )(n x 是右边序列,它的Z 变换的收敛域是半径为-x R 的圆的外部区域,这里 -x R =|)() 1(|lim n x n x n +→∞ =|)cos()]1(cos[|00lim n w n w n +→∞=1 )(n x 还是因果序列,可以有∞=||z ,故收敛域为∞≤≤||1z ,零点为0和0cos w , 极点为0 jw e 和 jw e -。 2.20求下列序列的Z 变换和收敛域和零极点分布图 (1) x(n)=a ||n ,0 0()a jw n +u(n) (3) x(n)=Ar n cos(0ω?+)u(n),0 1 ! n u(n) (5) x(n)=sin(0ω?+)u(n) (1)X(z)= n n n a z ∞ -=-∞ ∑ = 1 n n n n n n a z a z -∞ ---=-∞ =+∑ ∑ = 1 1 111n n n n n n ax a z a z ax ax ∞ ∞--=-=+=+ --∑∑ = 2(1) (1)()z a az z a --- X(n)是双边序列,可看成是由一个因果序列(收敛域a z <≤∞)和一个因果序列(收敛域1 0z a ≤< )相加组成,故X(z)的收敛域是这两个收敛域的重叠部分,即圆环区域1 a z a << 。零点为0和∞,极点为a 和 1a 。 (2) 0() ()()()j j n n n n X z e u n z e z ?θω?ω? ∞ ∞ ++=-∞ == =∑ ∑ = 11 1j e z ? θω+-- X(n)是右边序列,它的Z 变换的收敛域是半径为x R -的圆的外部区域,这里 (1) lim () x x x n R e x n θ-→∞+== X(n)还是右边序列,可以有 z =∞,故收敛域为e z θ<≤∞。零点为0,极点为0 j e θω+。 (3) ()() 11001 1()()11()cos()()()()2 2112121()21(o o o o o o o o o o n n o n j n j n n n n j j j j n n n n j j j j j j j j j j X z Ar n u n z e e Ar z n Ae Ae re z re z Ae Ae re z re z e re re z e A rz e e ω?ω?? ?ωω??ωωω?ω??? ωωω?∞ -=-∞ +-+∞ -=-∞ ∞ ---==-----------=++= = +=+---++=-+∑ ∑ ∑∑221122 )cos cos()12cos o o r z rz A rz r z ?ω?ω----?? ??+? ??--? =??-+? ? X(n)是右边序列,它的Z 变换的收敛域是半径为3R -的圆的 外部区域,这里 100cos[(1)](1) lim lim ()cos() n n r X n n r A n x n R z x n A ω?ω?+→∞→∞+++-===+ ()x n 还是因果序列,可以有 z =∞ ,故收敛域为 r z <≤∞ 。 零点为0和 0cos()cos r ω?? - ,极点为 0j re ω 和 0 j re ω- 数字信号处理习题及答案1 一、填空题(每空1分, 共10分) 1.序列()sin(3/5)x n n π=的周期为 。 2.线性时不变系统的性质有 律、 律、 律。 3.对4()()x n R n =的Z 变换为 ,其收敛域为 。 4.抽样序列的Z 变换与离散傅里叶变换DFT 的关系为 。 5.序列x(n)=(1,-2,0,3;n=0,1,2,3), 圆周左移2位得到的序列为 。 6.设LTI 系统输入为x(n) ,系统单位序列响应为h(n),则系统零状态输出 y(n)= 。 7.因果序列x(n),在Z →∞时,X(Z)= 。 二、单项选择题(每题2分, 共20分) 1.δ(n)的Z 变换是 ( )A.1 B.δ(ω) C.2πδ(ω) D.2π 2.序列x 1(n )的长度为4,序列x 2(n ) 的长度为3,则它们线性卷积的长度是 ( )A. 3 B. 4 C. 6 D. 7 3.LTI 系统,输入x (n )时,输出y (n );输入为3x (n-2),输出为 ( ) A. y (n-2) B.3y (n-2) C.3y (n ) D.y (n ) 4.下面描述中最适合离散傅立叶变换 DFT 的是 ( ) A.时域为离散序列,频域为连续信号 B.时域为离散周期序列,频域也为离散周期序列 C.时域为离散无限长序列,频域为连续周期信号 D.时域为离散有限长序列,频域也为离散有限长序列 5.若一模拟信号为带限,且对其抽样满足奈奎斯特条件,理想条件下将抽样信号通过 即 可完全不失真恢复原信号 ( )A.理想低通滤波器 B.理想高通滤波器 C.理想带通滤波器 D.理 想带阻滤波器 6.下列哪一个系统是因果系统 ( )A.y(n)=x (n+2) B. y(n)= cos(n+1)x (n) C. y(n)=x (2n) D.y(n)=x (- n) 第二章 2.1 判断下列序列是否是周期序列。若是,请确定它的最小周期。 (1)x(n)=Acos(6 85ππ+n ) (2)x(n)=)8( π-n e j (3)x(n)=Asin(3 43π π+n ) 解 (1)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),得出=ω85π。因此5 16 2=ωπ是有理数,所以是周期序列。最小周期等于N= )5(165 16 取k k =。 (2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。因此πωπ162=是无理数,所以不是周期序列。 (3)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π3 43π π-n )=Acos(6143-n π),得出=ω43π。因此3 8 2=ωπ是有理数,所以是周期序列。最小周期等于 N= )3(83 8 取k k = 2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。 (a) 1 11 1 (b) (c) 11 1 11 0 0 -1-1 -1 -1 -1 -1 -1 -1 2 2 2 22 2 3 3 3 3 34 44 … … …n n n n n n x(n)x(n) x(n) h(n)h(n) h(n)2 1 u(n) u(n) u(n)a n ===2 2 解利用线性卷积公式 y(n)=∑∞ -∞ =- k k n h k x) ( ) ( 按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。 (a) y(0)=x(O)h(0)=1 y(l)=x(O)h(1)+x(1)h(O)=3 y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n≥2 (b) x(n)=2δ(n)-δ(n-1) h(n)=-δ(n)+2δ(n-1)+ δ(n-2) y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)= ∑∞ -∞ =-- k k n k n u k u a) ( ) (=∑∞ -∞ = - k k n a= a a n - -+ 1 11 u(n) 2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λn u(n)*u(n) 解:(1) y(n)= ∑ ∞ -∞ = - k k n u k u) ( ) ( =∑ ∞ = - ) ( ) ( k k n u k u=(n+1),n≥0 即y(n)=(n+1)u(n) (2) y(n)=∑∞ -∞ = - k k k n u k u) ( ) ( λ 1-1画出下列序列的示意图 (1) (2) (3) (1) (2) (3) 1-2已知序列x(n)的图形如图1.41,试画出下列序列的示意图。 图1.41信号x(n)的波形 (1)(2) (3) (4) (5)(6) (修正:n=4处的值为0,不是3)(修正:应该再向右移4个采样点)1-3判断下列序列是否满足周期性,若满足求其基本周期 (1) 解:非周期序列; (2) 解:为周期序列,基本周期N=5; (3) 解:,,取 为周期序列,基本周期。 (4) 解: 其中,为常数 ,取,,取 则为周期序列,基本周期N=40。 1-4判断下列系统是否为线性的?是否为移不变的? (1)非线性移不变系统 (2) 非线性移变系统(修正:线性移变系统) (3) 非线性移不变系统 (4) 线性移不变系统 (5) 线性移不变系统(修正:线性移变系统)1-5判断下列系统是否为因果的?是否为稳定的? (1) ,其中因果非稳定系统 (2) 非因果稳定系统 (3) 非因果稳定系统 (4) 非因果非稳定系统 (5) 因果稳定系统 1-6已知线性移不变系统的输入为x(n),系统的单位脉冲响应为h(n),试求系统的输出y(n)及其示意图 (1) (2) (3) 解:(1) (2) (3) 1-7若采样信号m(t)的采样频率fs=1500Hz,下列信号经m(t)采样后哪些信号不失真? (1) (2) (3) 解: (1)采样不失真 (2)采样不失真 (3) ,采样失真 1-8已知,采样信号的采样周期为。 (1) 的截止模拟角频率是多少? (2)将进行A/D采样后,的数字角频率与的模拟角频率的关系如何? (3)若,求的数字截止角频率。 解: (1) (2) (3) 第2章DSP的硬件结构 DSP的硬件结构: DSP与标准微处理器有许多共同的地方,都是由CPU、存储器、总线、外设、接口、时钟组成。从广义上讲,可以说DSP是一种CPU。但DSP和一般的CPU 又有不同, DSP有自己的一些独特的特点,比如采用哈佛结构、流水线操作、独立的硬件乘法器、独立的DMA总线和控制器等。 Von Neuman结构与Harvard结构: Harvard结构:程序与数据存储空间分开,各有独立的地址总线和数据总线,取指和读数可以同时进行,从而提高速度,目前的水平已达到90亿次浮点运算/秒(9000MFLOPS)。 MIPS--Million Instruction Per Second MFLOPS--Million Floating Operation Per Second 流水操作(pipeline): 独立的硬件乘法器: 在卷积、数字滤波、FFT、相关、矩阵运算等算法中,都有A(kB(n-k一类的运算,大量重复乘法和累加。 通用计算机的乘法用软件实现,用若干个机器周期。 DSP有硬件乘法器,用MAC指令(取数、乘法、累加)在单周期内完成。 独立的DMA总线和控制器: 有一组或多组独立的DMA总线,与CPU的程序、数据总线并行工作,数据的传递和处理可以独立进行,DMA内部总线与系统总线完全分开,避开了总线使用上的瓶颈。在不影响CPU工作的条件下,DMA速度已达800Mbyte/s。 CPU: 通用微处理器的CPU由ALU和CU组成,其算术运算和逻辑运算通过软件来实现,如加法需要10个机器周期,乘法是一系列的移位和加法,需要数十个机器周期。 DSP的CPU设置硬件乘法器,可以在单周期内完成乘法和累加. 移位: 通用微处理器的移位,每调用一次移位指令移动1-bit DSP可以在一个机器周期内左移或右移多个bit,可以用来对数字定标,使之放大或缩小,以保证精度和防止溢出;还可以用来作定点数和浮点数之间的转换. 溢出: 通用CPU中,溢出发生后,设置溢出标志,不带符号位时回绕,带符号位时反相,带来很大的误差 DSP把移位输出的最高位(MSB)存放在一个位检测状态寄存器中,检测到MSB=1时,就通知下一次会发生溢出,可以采取措施防止. 数据地址发生器(DAG): 在通用CPU中,数据地址的产生和数据的处理都由ALU来完成 在DSP中,设置了专门的数据地址发生器(实际上是专门的ALU),来产生所需要的数据地址,节省公共ALU的时间. 外设(peripherals): 时钟发生器(振荡器与PLL) 定时器(Timer) 软件可编程等待状态发生器 通用I/O 同步串口(SSP)与异步串口(ASP) 1.4 习题与上机题解答 1. 用单位脉冲序列δ(n)及其加权和表示题1图所示的序列。 题1图 解:x(n)=δ(n+4)+2δ(n+2)-δ(n+1)+2δ(n)+δ(n -1)+2δ(n -2)+4δ(n -3)+0.5δ(n -4)+2δ(n -6) 2. 给定信号: ?? ? ??≤≤-≤≤-+=其它04 061 452)(n n n n x (1) 画出x(n)序列的波形, 标上各序列值; (2) 试用延迟的单位脉冲序列及其加权和表示x(n)序列; (3) 令x 1(n)=2x(n -2),试画出x 1(n)波形; (4) 令x 2(n)=2x(n+2),试画出x 2(n)波形; (5) 令x 3(n)=x(2-n),试画出x 3(n)波形。 解:(1) x(n)序列的波形如题2解图(一)所示。 (2) x(n)=-3δ(n+4)-δ(n+3)+δ(n+2)+3δ(n+1)+6δ(n)+6δ(n -1)+6δ(n -2)+6δ(n -3)+6δ(n -4) (3)x 1(n)的波形是x(n)的波形右移2位,再乘以2,画出图形如题2解图(二)所示。 (4) x 2(n)的波形是x(n)的波形左移2位,再乘以2,画出图形如题2解图(三)所示。 (5) 画x 3(n)时,先画x(-n)的波形(即将x(n)的波形以纵轴为中心翻转180°),然后再右移 2位, x 3(n)波形如题2解图(四)所示。 3.判断下面的序列是否是周期的; 若是周期的, 确定其周期。 (1)是常数 A n A n x 8π73 cos )(??? ??-=π (2))8 1 (j e )(π-= n n x 解:(1) 因为ω=7 3 π, 所以314 π 2= ω , 这是有理数,因此是周期序列,周期T=14。 (2) 因为ω=81 , 所以ωπ2=16π, 这是无理数, 因此是非周期序列。 4. 对题1图给出的x(n)要求: (1) 画出x(-n)的波形; (2) 计算x e (n)=1/2[x(n)+x(-n)], 并画出x e (n)波形; (3) 计算x o (n)=1/2[x(n)-x(-n)], 并画出x o (n)波形; (4) 令x 1(n)=x e (n)+x o (n), 将x 1(n)与x(n)进行比较, 你能得到什么结论? 解:(1)x(-n)的波形如题4解图(一)所示。 (2) 将x(n)与x(-n)的波形对应相加,再除以2,得到x e (n)。毫无疑问,这是一个偶对称序列。x e (n)的波形如题4解图(二)所示。 (3) 画出x o (n)的波形如题4解图(三)所示。 (4) 很容易证明:x(n)=x 1(n)=x e (n)+x o (n) 上面等式说明实序列可以分解成偶对称序列和奇对称序列。偶对称序列可以用题中(2)的公式计算,奇对称序列可以用题中(3)的公式计算。 5.设系统分别用下面的差分方程描述,x(n)与y(n)分别表示系统输入和输出,判断系统是否是线性非时变的。 数字信号处理作业实验题报告 第一章16.(1) 实验目的: 求解差分方程所描述的系统的单位脉冲响应和单位阶跃响应。 实验要求: 运用matlab求出y(n)=0.6y(n-1)-0.08y(n-2)+x(n)的单位脉冲响应和单位阶跃响应的示意图。 源程序: B1=1;A1=[1, -0.6, 0.08]; ys=2; %设差分方程 xn=[1, zeros(1, 20)]; %xn=单位脉冲序列,长度N=31 xi=filtic(B1, A1, ys); hn1=filter(B1, A1, xn, xi); %求系统输出信号hn1 n=0:length(hn1)-1; subplot(2, 1, 1);stem(n, hn1, '.') title('单位脉冲响应'); xlabel('n');ylabel('h(n)') xn=ones(1, 20); sn1=filter(B1, A1, xn, xi); %求系统输出信号sn1 n=0:length(sn1)-1; Subplot(2, 1, 2); stem(n, sn1, '.') title('单位阶跃响应'); xlabel('n'); ylabel('s(n)') 运行结果: 实验分析: 单位脉冲响应逐渐趋于0,阶跃响应保持不变,由此可见,是个稳定系统。 第二章31题 实验目的: 用matlab判断系统是否稳定。 实验要求: 用matlab画出系统的极,零点分布图,输入单位阶跃序列u(n)检查系统是否稳定。 源程序: A=[2, -2.98, 0.17, 2.3418, -1.5147]; B=[0, 0, 1, 5, -50]; subplot(2,1,1); zplane(B,A); %求H(z)的极点 p=roots(A); %求H(z)的模 pm=abs(p); if max(pm)<1 disp('系统因果稳定'), else,disp('系统因果不稳定'),end un=ones(1,800); sn=filter(B, A, un); n=0:length(sn)-1; subplot(2, 1, 2);plot(n, sn) xlabel('n');ylabel('s(n)') 一. 填空题 1、一线性时不变系统,输入为x(n)时,输出为y(n);则输入为2x(n)时,输出为2y(n) ;输入为x(n-3)时,输出为y(n-3) 。 2、从奈奎斯特采样定理得出,要使实信号采样后能够不失真还原,采样频率fs与信号最高频率f max关系为:fs>=2f max。 3、已知一个长度为N的序列x(n),它的离散时间傅立叶变换为X(e jw),它的N点离散傅立叶变换X(K)是关于X(e jw)的N 点等间隔采样。 4、有限长序列x(n)的8点DFT为X(K),则X(K)= 。 5、用脉冲响应不变法进行IIR数字滤波器的设计,它的主要缺点是频谱的交叠所产生的现象。 6.若数字滤波器的单位脉冲响应h(n)是奇对称的,长度为N,则它的对称中心是(N-1)/2 。 7、用窗函数法设计FIR数字滤波器时,加矩形窗比加三角窗时,所设计出的滤波器的过渡带比较窄,阻带衰减比较小。 8、无限长单位冲激响应(IIR)滤波器的结构上有反馈环路,因此是递归型结构。 9、若正弦序列x(n)=sin(30nπ/120)是周期的,则周期是N= 8 。 10、用窗函数法设计FIR数字滤波器时,过渡带的宽度不但与窗的类型有关,还与窗的采样点数有关 11.DFT与DFS有密切关系,因为有限长序列可以看成周期序列的主值区间截断,而周期序列可以看成有限长序列的周期延拓。 12.对长度为N的序列x(n)圆周移位m位得到的序列用x m (n)表示,其数学表达式为 x m (n)= x((n-m)) N R N (n)。 13.对按时间抽取的基2-FFT流图进行转置,并将输入变输出,输出变输入即可得到按频率抽取的基2-FFT流图。 14.线性移不变系统的性质有交换率、结合率和分配律。 15.用DFT近似分析模拟信号的频谱时,可能出现的问题有混叠失真、泄漏、栅栏效应和频率分辨率。 第一章 第二章 11-=--m/2 m=-m -/2 12 m=--/2 -/21 2 m=-m=-()121.7DTFT[x(2n)]=(2n)e m=2n DTFT[x(2n)]=(m)e =[()(1) ()]e [()e e ()e ] [()()] j n n j m j m j m j m j m j j x x x m x m x m x m X e X e ωωωωπ ωωωπ∞ ∞∞ ∞∞ ∞∞ ∞ ∞ ∞-+-=+ =+∑∑ ∑∑∑,为偶数 求下列序列的傅里叶变换()x(2n) 令,于是 -n 1 1 121 z (1) 2u(n)()2 ()2 1,|(2)|11(2),||n n n n n n X z u n z z z z z z z +∞ --=-∞+∞ --=-∞ --=== <-=>-∑∑14.求出下列序列的变换及收敛域 3.3(1).()cos(),781() 8 (2).()5.25n 640() (5)()x n A n A j n x n e x n y n e πππω=--==判断下面的序列是否周期的是常数 试判断系统是否为线性时不变的()y(n)=x (n)(7) y(n)=x(n)sin() .试判断系统是否为因果稳定系统()y(n)=x(n-n ) -1 -1-2 -1 -1112 1-317.X(z)=,2-5+2105< | z | < 2x(n)(2) | z | > 2x(n) 11 X(z)= -1-z 1-2z 05< | z | < 2(n)=2(-n-1)+()(n) | z | > 2(n)=()(n)-2(n)n n n n z z z u u u u 已知分别求:()收敛域.对应的原序列收敛域对应的原序列解:收敛域.时: x 收敛域时: x -1-1 -1 -1-1 -1 21.(n)=0.9y(n-1)+x(n)+0.9x(n-1)(1)h(n)(2)H(e )1+0.9(1)H(z)=,|z|>0.91-0.91+0.9F(z)=H(z)z =z 1-0.9n 1z=0.9(n j n n z z z z h ω≥已知线性因果网络用下面差分方程表示: y 求网络的系统函数及单位脉冲响应写出网络频率响应函数的表达式,并定性画出其幅频特性曲线解: 令当时,有极点-1-1=0.9-112-1-1-1-1=0=0.9-1-1)=Res[F(z),0.9]1+0.9=z (z-0.9)|1-0.9=20.9(n)=0,n<0 n=0z =0,=0.9(n)=Res[F(z),0]+Res[F(z),0.9]1+0.91+0.9=z z|+z (z-0.9)|1-0.91-0.9=-1+2=1 h(n)=n z n z z z z z h z z z z ?∴因为系统是因果系统,所以有h 当时,有极点00000000=0n-m =0n -m =0 n n 20.9(n-1)+(n)+0.9 (2)H(e )=-0.9 (3)y(n)=h(n)*x(n) =(m)x(n-m) =(m)e =(m)e e =e H(e )+0.9=e -0.9 n j j j m j m j j m j j j j j u e e h h h e e ωω ω ωωωωωωωωδ∞ ∞ ∞ ?∑∑∑( ) 第一章,DSP技术概述 1.DSP是什么?DSP芯片又是什么?二者区别? 1)Digtial Signal Processing代表数字信号处理技术,理论,算法。 2)Digital Signal Processor 代表数字信号处理器,既DSP芯片。 3)前者是理论和计算方法上的技术,后者是指实现这些技术的通用或专用可编程微处理器芯片。 2.DSP 芯片按数据格式分类:定点DSP和浮点DSP, 3.字长:计算机一次能够处理的二进制数的位数。 4.存储空间由地址总线的位数决定。 5.堆栈方式:向下生长型 6.定点DSP,TMS320C2x,TMS320C2xx,TMS320C5x,TMS320C54x 浮点DSP,TMS350C3x,TMS320C4x和TMS320C8x, 多处理器:TMS320C6x 7.MAC时间,一次乘法和一次加法的时间,大部分DSP芯片可在一个指令周期内完成一次乘法和一次加法操作。 8.流水线技术是将指令的各个步骤重叠起来执行,而不是一条指令执行完成后,才开始执行下一条指令。 第二章,DSP芯片结构介绍 9.存储器映像寄存器:指用0页数据存储器来当做寄存器用,而不专门设计制作寄存器从而可简化设计,并增加数据储存器的使用灵活性, 10.桶形移位寄存器范围:左移最多31位,右移最多16位。 11.递增:压:先SP+1,再入栈; 弹:先弹栈,再SP-1。 12.MP/MC:微处理器/微型计算机工作方式位 MP/MC=0,允许使能并寻址片内ROM; MP/MC=1,不能利用片内ROM。 13.OVLY可以允许片内双寻址数据RAM块映射到程序空间,OVLY=0,只能在数据空间而不能在程序空间寻址在片RAM;OVLY=1片内RAM,可以映像到程序空间和数据空间,但是数据页0(0h~7Fh)不能映像到程序空间。 14.TSM320C54x芯片在提高芯片运算速度方面采用了哪些措施? 1)采用了单个指令周期实现乘加运算的处理技术;单周期实现多个运算单元并行处理;数据搬运工作由DMA处理,无需CPU干涉;提供针对高级数学运算(指数,开方,FFT等)的密函数。 2)数据总线(CB DB和EB),将内部各单元(如CPU,数据地址生成电路,程序地址产生逻辑,在片外围电路,以及数据存储器)连接在一起,其中CB和DB传送独自数据存储器的操作数,EB传送写到存储器的数据。 3)地址总线(PAB,CAB,DAB和EAB):传送执行指令所需的地址。 16.DSP采用多处理单元结构有何好处? 可完成巨大运算量的多处理器系统,即将算法划分给多个处理器,借助高速通信接口来实现计算任务并行处理的多处理器阵列。 17.TSM320C54x芯片的CPU主要包括哪些部分?它们的功能是什么? 1)算术逻辑运算单元(ALU),可完成宽范围的算术逻辑运算; 2)累加器A和B:可用于存放从ALU或乘/加单元输出的数据,也能输入数据到ALU或乘/加单元; 3)桶形移位器:对输入数据进行0~31位的左移,和0~16位的右移; 4)乘法器/加法器:可在一个指令周期里完成17*17位的进制补码乘法运算,也可在一个流水线状态周期内完成一个乘法累加(MAC)运算, 5)比较,选择和存储单元:专为Visterb算法设计的进行加法/比较/选择(ACS)运算的硬件单元; 6)指数编码器:用于支持单周期指令EXP的专用硬件,它可以求出累加器的指数值,并以2的补码方式存到T寄存器中, 7)CPU状态和控制寄存器:ST0和ST1中包含有各种工作条件和工作方式的状态;PMST中包含存储器的设置状态,及其他控制信息, 18.累加器A和B的作用是什么?它们有何区别? 作用:同17.2)在执行MIN和MAX指令或者并行指令时都要用到它们,这时,一个累加器加载数据,另一个完成预算。区别:累加器A的31~16位可以用作乘法器的一个输入。19.STO.ST1.PMST的作用是什么?它们是如何影响DSP工作过程的? 见书P23-P26 20.C54x的总存储空间为192k字,它们由3个可选择的存储空间构成,即64k字的程序存储空间,64k字的数据存储空间和64k字的I/O空间。 21.RAM有两种:单寻址RAM(SARAM)和双寻址RAM (DARAM):一个周期内访问两次与片外存储器相比,片内存储器具有不需插入等待状态,成本和功耗低等优点。 22.试述三种存储器空间的各自作用是什么? 1)程序存储空间:用于存放要执行的指令和指令执行中所用的系列表; ==============================绪论============================== 1. A/D 8bit 5V 00000000 0V 00000001 20mV 00000010 40mV 00011101 29mV ==================第一章 时域离散时间信号与系统================== 1. ①写出图示序列的表达式 答:3)1.5δ(n 2)2δ(n 1)δ(n 2δ(n)1)δ(n x(n)-+---+++= ②用δ(n) 表示y (n )={2,7,19,28,29,15} 2. ①求下列周期 ②判断下面的序列是否是周期的; 若是周期的, 确定其周期。 (1)A是常数 8ππn 73Acos x(n)??? ? ??-= (2))8 1 (j e )(π-=n n x 解: (1) 因为ω= 73π, 所以314 π2=ω, 这是有理数, 因此是周期序列, 周期T =14。 (2) 因为ω= 81, 所以ω π2=16π, 这是无理数, 因此是非周期序列。 ③序列)Acos(nw x(n)0?+=是周期序列的条件是是有理数2π/w 0。 3.加法 乘法 序列{2,3,2,1}与序列{2,3,5,2,1}相加为__{4,6,7,3,1}__,相乘为___{4,9,10,2} 。 移位 翻转:①已知x(n)波形,画出x(-n)的波形图。 ② 尺度变换:已知x(n)波形,画出x(2n)及x(n/2)波形图。 卷积和:①h(n)*求x(n),其他0 2 n 0n 3,h(n)其他03n 0n/2设x(n) 例、???≤≤-=???≤≤= ②已知x (n )={1,2,4,3},h (n )={2,3,5}, 求y (n )=x (n )*h (n ) x (m )={1,2,4,3},h (m )={2,3,5},则h (-m )={5,3,2}(Step1:翻转) 西安电子 ( 高西全丁美玉第三版 ) 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列 (n) 及其加权和表示 题 1 图所示的序列。 解: x( n)(n 4) 2 (n 2) ( n 1) 2 (n)(n 1) 2 (n 2) 4 ( n 3) 0.5 (n 4) 2 (n 6) 2n 5, 4 n 1 2. 给定信号: x( n) 6,0 n 4 0, 其它 (1)画出 x( n) 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示 x(n) 序列; (3)令 x 1( n) 2x(n 2) ,试画出 x 1( n) 波形; (4)令 x 2 (n) 2x(n 2) ,试画出 x 2 (n) 波形; (5)令 x 3 (n) 2x(2 n) ,试画出 x 3 (n) 波形。 解: ( 1) x(n) 的波形如 题 2 解图(一) 所示。 ( 2) x(n)3 ( n 4) (n 3) (n 2) 3 ( n 1) 6 (n) 6 (n 1) 6 ( n 2) 6 (n 3) 6 (n 4) ( 3) x 1 (n) 的波形是 x(n) 的波形右移 2 位,在乘以 2,画出图形如 题 2 解图(二) 所示。 ( 4) x 2 (n) 的波形是 x(n) 的波形左移 2 位,在乘以 2,画出图形如 题 2 解图(三) 所示。 ( 5)画 x 3 (n) 时,先画 x(-n) 的波形,然后再右移 2 位, x 3 ( n) 波形如 题 2 解图(四) 所 示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1) x( n) Acos( 3 n ) ,A 是常数; 7 8 (2) x(n) j ( 1 n ) e 8 。 解: 【最新整理,下载后即可编辑】 第二章 2.1 判断下列序列是否是周期序列。若是,请确定它的最小周期。 (1)x(n)=Acos(6 85ππ+n ) (2)x(n)=)8( π-n e j (3)x(n)=Asin(3 43π π+ n ) 解 (1)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),得出= ω8 5π 。因此 5 16 2= ωπ 是有理数,所以是周期序列。最小周期等于N= )5(165 16 取k k =。 (2)对照复指数序列的一般公式 x(n)=exp[ωσj +]n,得出8 1 =ω。因此 πω π 162=是无理数,所以不是周期序列。 (3)对照正弦型序列的一般公式x(n)=Acos(?ω+n ),又x(n)=Asin(3 43ππ+n ) =Acos( -2π343ππ-n )=Acos(6143-n π),得出= ω43π。因此3 8 2=ωπ是有理数,所以是周期序列。最小周期等于N=)3(83 8 取k k = 2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。 (a) 1 11 1 (b) (c) 11 1 11 0 0 -1 -1 -1 -1 -1 -1 -1 2 2 2 22 2 3 3 3 34 44 … … …n n n n n n x(n)x(n) x(n) h(n)h(n) h(n)2 1 u(n) u(n) u(n)a n ===2 2 解 利用线性卷积公式 y(n)=∑∞ -∞=-k k n h k x )()( 按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。 (a) y(0)=x(O)h(0)=1 y(l)=x(O)h(1)+x(1)h(O)=3 y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1) h(n)=-δ(n)+2δ(n-1)+ δ(n-2) y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)= ∑∞ -∞=--k k n k n u k u a )()(= ∑∞ -∞ =-k k n a = a a n --+111u(n) 三、计算题 1、已知10),()(<<=a n u a n x n ,求)(n x 的Z 变换及收敛域。 (10分) 解:∑∑∞ =-∞ -∞=-= = )()(n n n n n n z a z n u a z X 1 111 )(-∞=--== ∑ az z a n n ||||a z > 2、设)()(n u a n x n = )1()()(1--=-n u ab n u b n h n n 求 )()()(n h n x n y *=。(10分) 解:[]a z z n x z X -=? =)()(, ||||a z > []b z a z b z a b z z n h z H --=---= ?=)()(, ||||b z > b z z z H z X z Y -= =)()()( , |||| b z > 其z 反变换为 [])()()()()(1n u b z Y n h n x n y n =?=*=- 3、写出图中流图的系统函数。(10分) 解:2 1)(--++=cz bz a z H 2 1124132)(----++= z z z z H 4、利用共轭对称性,可以用一次DFT 运算来计算两个实数序列的DFT ,因而可以减少计算量。设都是N 点实数序列,试用一次DFT 来计算它们各自的DFT : [])()(11k X n x DFT = []) ()(22k X n x DFT =(10分)。 解:先利用这两个序列构成一个复序列,即 )()()(21n jx n x n w += 即 [][])()()()(21n jx n x DFT k W n w DFT +== []()[]n x jDFT n x DFT 21)(+= )()(21k jX k X += 又[])(Re )(1n w n x = 得 [])(})({Re )(1k W n w DFT k X ep == [] )())(()(2 1*k R k N W k W N N -+= 同样 [])(1 })({Im )(2k W j n w DFT k X op == [] )())(()(21*k R k N W k W j N N --= 所以用DFT 求出)(k W 后,再按以上公式即可求得)(1k X 与)(2k X 。 5、已知滤波器的单位脉冲响应为)(9.0)(5n R n h n =求出系统函数,并画出其直接型 结构。(10分) 解: x(n) 1-z 1-z 1-z 1-z 1 9.0 2 9.0 3 9.0 4 9.0 y(n) 6、略。 7、设模拟滤波器的系统函数为 31 11342)(2+-+=++=s s s s s H a 试利用冲激响应不变法,设计IIR 数字滤波器。(10分) 解 T T e z T e z T z H 31111)(-------= 答案很详细,考试前或者平时作业的时候可以好好研究,祝各位考试 成功!! 电子科技大学微电子与固体电子学钢教授著 数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤??? 其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n =; (7)0()()n m y n x m ==∑。 解: (1)令:输入为0()x n n -,输出为 '000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。 12121212()[()()] ()()2((1)(1))3((2)(2)) y n T ax n bx n ax n bx n ax n bx n ax n bx n =+=++-+-+-+- 1111[()]()2(1)3(2)T ax n ax n ax n ax n =+-+- 2222[()]()2(1)3(2)T bx n bx n bx n bx n =+-+- 1212[()()][()][()]T ax n bx n aT x n bT x n +=+ 故该系统是线性系统。 数字信号处理第2章习题解答 2.1 今对三个正弦信号1()cos(2)a x t t π=,2()cos(6)a x t t π=-,3()cos(10)a x t t π=进行理想采样,采样频率为8s πΩ=,求这三个序列输出序列,比较其结果。画出 1()a x t 、2()a x t 、3()a x t 的波形及采样点位置并解释频谱混淆现象。 解:采样周期为2184 T ππ= = 三个正弦信号采样得到的离散信号分别表示如下: 1()cos(2)cos()42a n x n n π π=?= 2()cos(6)cos()42a n x n n π π=-?=- 3()cos(10)cos()42 a n x n n π π=?= 输出序列只有一个角频率2π ,其中1()a x n 和3()a x n 采样序列完全相同,2()a x n 和 1()a x n 、3()a x n 采样序列正好反相。 三个正弦信号波形及采样点位置图示如下: t x a 1(t ) t x a 2(t ) t x a 3(t ) 三个正弦信号的频率分别为1Hz 、3Hz 和5Hz ,而采样频率为4Hz ,采样频率大于第一个正弦信号频率的两倍,但是小于后两个正弦信号频率的两倍,因而由第一个信号的采样能够正确恢复模拟信号,而后两个信号的采样不能准确原始的模拟信号,产生频谱混叠现象。 2.3 给定一连续带限信号()a x t 其频谱当f B >时,()a X f 。求以下信号的最低采样频率。 (1)2()a x t (2)(2)a x t (3)()cos(7)a x t Bt π 数字信号处理习题及答案 ==============================绪论============================== 1. A/D 8bit 5V 00000000 0V 00000001 20mV 00000010 40mV 00011101 29mV ==================第一章 时域离散时间信号与系统================== 1. ①写出图示序列的表达式 答:3)1.5δ(n 2)2δ(n 1)δ(n 2δ(n)1)δ(n x(n)-+---+++= ②用δ(n) 表示y (n )={2,7,19,28,29,15} 2. ①求下列周期 ) 5 4sin( )8 sin( )4() 51 cos()3() 54sin()2() 8sin( )1(n n n n n πππ π - ②判断下面的序列是否是周期的; 若是周期的, 确定其周期。 (1) A是常数 8ππn 73Acos x(n)???? ? ?-= (2))8 1 (j e )(π-=n n x 解: (1) 因为ω=73π, 所以3 14 π2=ω, 这是有理数, 因此是周期序列, 周期T =14。 (2) 因为ω=81, 所以ω π 2=16π, 这是无理数, 因此是非周期序列。 ③序列)Acos(nw x(n)0 ?+=是周期序列的条件是是有理数2π/w 0 。 3.加法 乘法 序列{2,3,2,1}与序列{2,3,5,2,1}相加为__{4,6,7,3,1}__,相乘为___{4,9,10,2} 。 移位 翻转:①已知x(n)波形,画出x(-n)的波形图。 ② 尺度变换:已知x(n)波形,画出x(2n)及x(n/2)波形图。 数字信号处理试卷及答案 一、 选择题(每题3分,共5题) 1、 )63()(π-=n j e n x ,该序列是 。 A.非周期序列 B.周期6π =N C.周期π6=N D. 周期π2=N 2、 序列)1()(---=n u a n x n ,则)(Z X 的收敛域为 。 A.a Z < B.a Z ≤ C.a Z > D.a Z ≥ 3、 对)70()(≤≤n n x 和)190()(≤≤n n y 分别作20点DFT ,得)(k X 和)(k Y , 19,1,0),()()( =?=k k Y k X k F ,19,1,0)],([)( ==n k F IDFT n f , n 在 范围内时,)(n f 是)(n x 和)(n y 的线性卷积。 A.70≤≤n B.197≤≤n C.1912≤≤n D.190≤≤n 4、 )()(101n R n x =,)()(72n R n x =,用DFT 计算二者的线性卷积,为使计算量尽可能的少,应使 DFT 的长度N 满足 。 A.16>N B.16=N C.16 西安电子(高西全丁美玉第三版)数字信号处理课后答案 1.2 教材第一章习题解答 1. 用单位脉冲序列()n δ及其加权和表示题1图所示的序列。 解: ()(4)2(2)(1)2()(1)2(2)4(3) 0.5(4)2(6) x n n n n n n n n n n δδδδδδδδδ=+++-+++-+-+-+-+- 2. 给定信号:25,41()6,040,n n x n n +-≤≤-?? =≤≤?? ?其它 (1)画出()x n 序列的波形,标上各序列的值; (2)试用延迟单位脉冲序列及其加权和表示()x n 序列; (3)令1()2(2)x n x n =-,试画出1()x n 波形; (4)令2()2(2)x n x n =+,试画出2()x n 波形; (5)令3()2(2)x n x n =-,试画出3()x n 波形。 解: (1)x(n)的波形如题2解图(一)所示。 (2) ()3(4)(3)(2)3(1)6() 6(1)6(2)6(3)6(4) x n n n n n n n n n n δδδδδδδδδ=-+-+++++++-+-+-+- (3)1()x n 的波形是x(n)的波形右移2位,在乘以2,画出图形如 题2解图(二)所示。 (4)2()x n 的波形是x(n)的波形左移2位,在乘以2,画出图形如题2解图(三)所示。 (5)画3()x n 时,先画x(-n)的波形,然后再右移2位,3()x n 波形如题2解图(四)所示。 3. 判断下面的序列是否是周期的,若是周期的,确定其周期。 (1)3()cos()78 x n A n π π= -,A 是常数; (2)1 ()8 ()j n x n e π-=。 解: (1)3 214 , 73w w π π= = ,这是有理数,因此是周期序列,周期是T=14; (2)12,168w w π π ==,这是无理数,因此是非周期序列。 5. 设系统分别用下面的差分方程描述,()x n 与()y n 分别表示系统输入和输出,判断系统是否是线性非时变的。 (1)()()2(1)3(2)y n x n x n x n =+-+-; (3)0()()y n x n n =-,0n 为整常数; (5)2()()y n x n = ; (7)0 ()() n m y n x m ==∑ 。 解: (1)令:输入为0()x n n -,输出为 ' 000' 0000()()2(1)3(2) ()()2(1)3(2)() y n x n n x n n x n n y n n x n n x n n x n n y n =-+--+---=-+--+--= 故该系统是时不变系统。数字信号处理习题及答案1
数字信号处理答案第二章
数字信号处理答案解析
DSP原理及应用第二章DSP的硬件结构总结(精)
数字信号处理课后答案
数字信号处理第二章上机题作业
数字信号处理试题和答案 (1)
数字信号处理习题解答1
DSP第一第二章可做小条
数字信号处理习题及答案
《数字信号处理》第三版课后答案(完整版)
数字信号处理 答案 第二章(精编文档).doc
数字信号处理习题及答案
《数字信号处理》第三版答案(非常详细完整)
(完整word版)数字信号处理第二章习题解答
数字信号处理习题及答案
数字信号处理试卷及答案
数字信号处理课后答案 西安电子(高西全丁美玉第三版)
相关主题
文本预览