全面解析5种常见悬挂 在这个言必谈操控、论必说运动的年代里,几乎所有汽车品牌多在大力的宣传自己产品优秀的操控性能,从欧系的宝马、奥迪、萨伯到日系的讴歌、英菲尼迪等高端品牌无不在极力宣传自己良好的操控性和运动性,就连一向以舒适性能为取向的奔驰、凯迪拉克、雷克萨斯等高端品牌也在新近的设计中加入了更多的运动取向。从以福克斯为代表的紧凑型轿车到以迈腾为代表的中级车到以宝马5系Li为代表的高档车无不标榜自己的运动性能。那么他们是否如宣传所说这么优秀,此次汽车探索就为大家解读影响汽车运动性能的汽车底盘的核心——悬挂系统,并分析不同悬挂对汽车操控性及舒适性的影响。 『悬挂在汽车底盘安放位置的示意图』 ● 悬挂的概念和分类 首先让我们来了解一下什么是悬挂:悬挂是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,悬架的主要作用是传递作用在车轮和车身之间的一切力和力矩,比如支撑力、制动力和驱动力等,并且缓和由不平路面传给车身的冲击载荷、衰减由此引起的振动、保证乘员的舒适性、减小货物和车辆本身的动载荷。典型的汽车悬挂结构由弹性元件、减震器以及导向机构等组成,这三部分分别起缓冲,减振和力的传递作用。绝大多数悬挂多具有螺旋弹簧和减振器结构,但不同类型的悬挂的导向机构差异却很大,这也是悬挂性能差异的核心构件。根据结构不同可分为非独立悬挂和独立悬挂两种。
『奥迪S4前后均采用了独立悬挂』 非独立悬挂由于是用一根杆件直接刚性地连接在两侧车轮上,一侧车轮受到的冲击、振动必然要影响另一侧车轮,这样自然不会得到较好的操纵稳定性及舒适性,同时由于左右两侧车轮的互相影响,也容易影响车身的稳定性,在转向的时候较易发生侧翻。独立悬挂底盘扎实感非常明显。由于采用独立悬挂汽车的两侧车轮彼此独立地与车身相连,因此从使用过程来看,当一侧车轮受到冲击、振动后可通过弹性元件自身吸收冲击力,这种冲击力不会波及另一侧车轮,使得厂家可在车型的设计之初通过适当的调校使汽车在乘坐舒适性、稳定性、操纵稳定性三方面取得合理的配置。选用独立悬挂汽车一般来说其操控性和舒适性均要明显好于选用非独立悬挂的汽车。 『多连杆悬挂是独立悬挂的典型代表』
多目标优化实例和m a t l a b程序
精品文档 收集于网络,如有侵权请联系管理员删除 NSGA-II 算法实例 目前的多目标优化算法有很多, Kalyanmoy Deb 的带精英策略的快速非支配排序遗传算法(NSGA-II) 无疑是其中应用最为广泛也是最为成功的一种。本文用的算法是MATLAB 自带的函数gamultiobj ,该函数是基于NSGA-II 改进的一种多目标优化算法。 一、 数值例子 多目标优化问题 424221********* 4224212212112 12min (,)10min (,)55..55 f x x x x x x x x x f x x x x x x x x x s t x =-++-=-++-≤≤??-≤≤? 二、 Matlab 文件 1. 适应值函数m 文件: function y=f(x) y(1)=x(1)^4-10*x(1)^2+x(1)*x(2)+x(2)^4-x(1)^2*x(2)^2; y(2)=x(2)^4-x(1)^2*x(2)^2+x(1)^4+x(1)*x(2); 2. 调用gamultiobj 函数,及参数设置: clear clc fitnessfcn=@f; %适应度函数句柄 nvars=2; %变量个数 lb=[-5,-5]; %下限 ub=[5,5]; %上限 A=[];b=[]; %线性不等式约束 Aeq=[];beq=[]; %线性等式约束 options=gaoptimset('paretoFraction',0.3,'populationsize',100,'generations' ,200,'stallGenLimit',200,'TolFun',1e-100,'PlotFcns',@gaplotpareto); % 最优个体系数paretoFraction 为0.3;种群大小populationsize 为 100,最大进化代数generations 为200, % 停止代数stallGenLimit 为200, 适应度函数偏差TolFun 设为1e- 100,函数gaplotpareto :绘制Pareto 前端 [x,fval]=gamultiobj(fitnessfcn,nvars,A,b,Aeq,beq,lb,ub,options)
中级轿车多连杆后悬架设计-王昱昕-20070306 中级轿车多连杆后悬架设计 --------几何学定义GEOMETRY 二零零七年三月六日 PDF 文件使用 "pdfFactory Pro" 试用版本创建 comcn 序言 本文档主要从整车总布置角度出发在总体概念设计阶段进行悬架的 选型硬点几何定义设计从而确定悬架各相关部件的详细结构设计边 界和输入信息
PDF 文件使用 "pdfFactory Pro" 试用版本创建 comcn 目录 后悬架常见类型 多连杆优缺点详细分析 预备信息 多连杆后悬架几何详细定义步骤 悬架目标设定 PDF 文件使用 "pdfFactory Pro" 试用版本创建 comcn 常见后悬架类型 1 拖曳臂TRAILING ARM 2 扭曲梁TWIST AXLE
3 多连杆MULTILINK PDF 文件使用 "pdfFactory Pro" 试用版本创建 comcn 拖曳臂 TRAILING ARM 后悬架 优点 沿Y和Z方向的尺寸较小因此对于后部车厢布置非常有利能有较好的空间利用率尤其是轮罩之间的宽 度较大和容易布置备胎和油箱 悬架和车身容易装配 悬架结构简单零部件少容易分装 由于没有衬套滞后性较小 容易保护后驱
Compatibility with traction 缺点 在沿着车身与拖曳臂的旋转轴拖曳臂的长度和宽度有比较大的杠杆比因此当存在侧向载荷有不利 的前束 在车身的横向翻转有不利的车轮外倾角如果有一个比较合适的悬转轴有可能纠正外倾角但这样会影 响轮罩之间的宽度 不好的调整潜能所有的几何特征和相应变形参数都是相关联的 由于缺少衬套不能进行有效的衰减震动 PDF 文件使用 "pdfFactory Pro" 试用版本创建 comcn 扭曲梁 TWIST AXLE 后悬架
前言: 悬架是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,其作用是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动,以保证汽车能平顺地行驶。典型的悬架结构由弹性元件、导向机构以及减震器等组成,个别结构则还有缓冲块、横向稳定杆等。弹性元件又有钢板弹簧、空气弹簧、螺旋弹簧以及扭杆弹簧等形式,而现代轿车悬架多采用螺旋弹簧和扭杆弹簧,个别高级轿车则使用空气弹簧。悬架是汽车中的一个重要总成,它把车架与车轮弹性地联系起来,因此悬架与车辆的行驶平顺性、操控稳定性具有极大的关系。悬架设计的好坏直接影响到整车的性能。因此开发出高品质的悬架是车辆工程师的一项重要任务。而悬架部分涉及的专业知识也比较高深,本文期望通过对悬架进行初级设计以达到对悬架有进一步了解的目 的。 关键词:悬架;减震器;弹簧计算 1
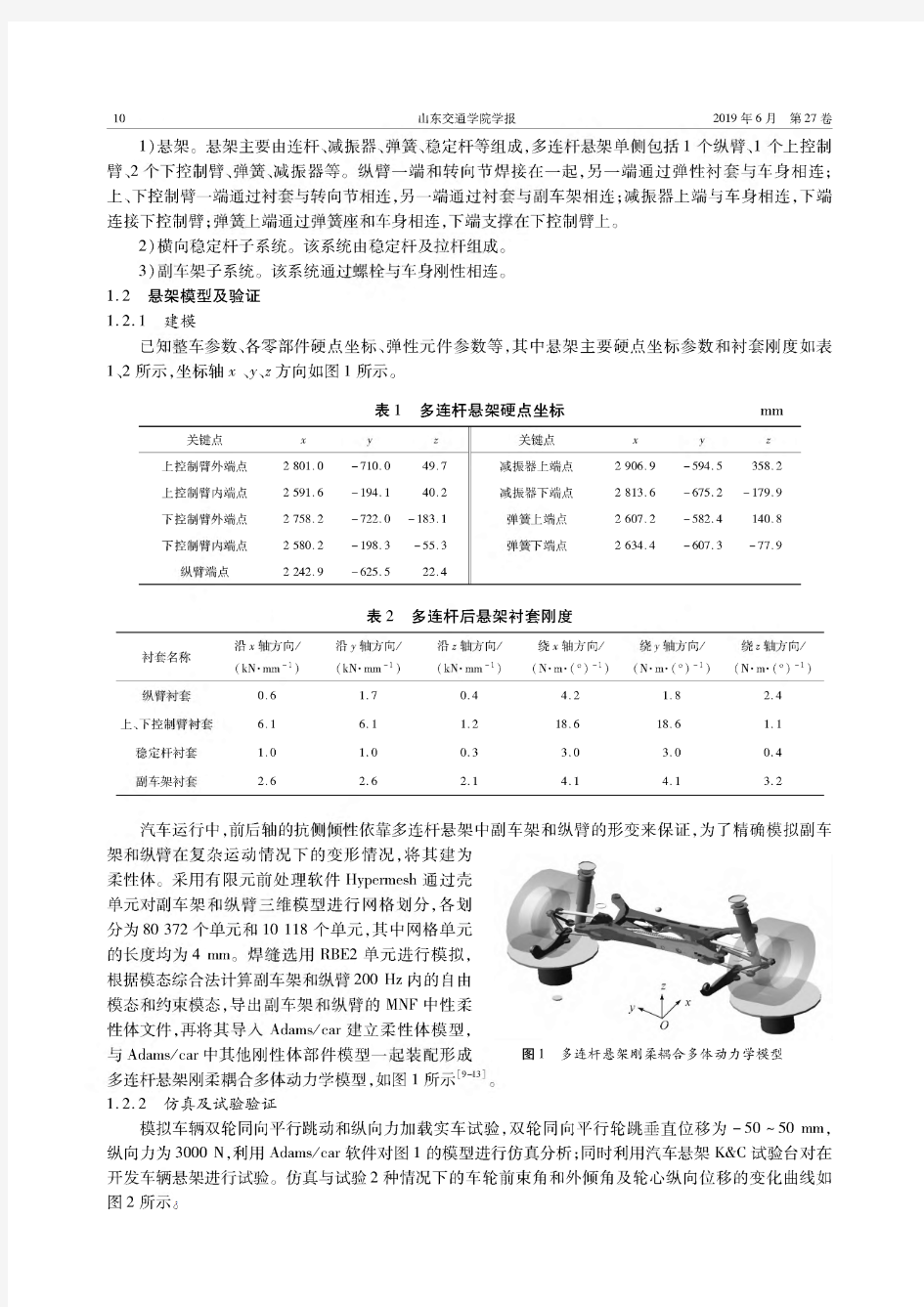
1悬架 1.1悬架的功用 汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。它的作用是弹性地连接车桥和车架(或车身),缓和行驶中车辆受到的冲击力;保证货物完好和人员舒适;衰减由于弹性系统引进的振动,使汽车行驶中保持稳定的姿势,改善操纵稳定性;同时悬架系统承担着传递垂直反力,纵向反力(牵引力和制动力)和侧向反力以及这些力所造成的力矩作用到车架(或车身)上,以保证汽车行驶平顺;并且当车轮相对车架跳动时,特别在转向时,车轮运动轨迹要符合一定的要求,因此悬架还起使车轮按一定轨迹相对车身跳动的导向作用。 1.2 悬架的组成 一般悬架由弹性元件、导向机构、减振器和横向稳定杆组成。 1.弹性元件 弹性元件用来承受并传递垂直载荷,缓和由于路面不平引起的对车身的冲击。弹性元件种类包括钢板弹簧、螺旋弹簧、扭杆弹簧、油气弹簧、空气弹簧和橡胶弹簧等,这里我们选用螺旋弹簧。 2.减振器 减振器用来衰减由于弹性系统引起的振动,减振器的类型有筒式减振器,阻力可调式新式减振器,充气式减振器。 3.导向机构 导向机构用来传递车轮与车身间的力和力矩,同时保持车轮按一定运动轨迹相对车身跳动,通常导向机构由控制摆臂式杆件组成。种类有单杆式或多连杆式的。钢板弹簧作为弹性元件时,可不另设导向机构,它本身兼起导向作用。有些轿车和客车上,为防止车身在转向等情况下发生过大的横向倾斜,在悬架系统中加设横向稳定杆,目的是提高横向刚度,使汽车具有不足转向特性,改善汽车的操纵稳定性和行驶平顺性。
浅析多目标优化问题 【摘要】本文介绍了多目标优化问题的问题定义。通过对多目标优化算法、评估方法和测试用例的研究,分析了多目标优化问题所面临的挑战和困难。 【关键词】多目标优化问题;多目标优化算法;评估方法;测试用例 多目标优化问题MOPs (Multiobjective Optimization Problems)是工程实践和科学研究中的主要问题形式之一,广泛存在于优化控制、机械设计、数据挖掘、移动网络规划和逻辑电路设计等问题中。MOPs有多个目标,且各目标相互冲突。对于MOPs,通常存在一个折衷的解集(即Pareto最优解集),解集中的各个解在多目标之间进行权衡。获取具有良好收敛性及分布性的解集是求解MOPs的关键。 1 问题定义 最小化MOPs的一般描述如下: 2 多目标优化算法 目前,大量算法用于求解MOPs。通常,可以将求解MOPs的算法分为两类。 第一类算法,将MOPs转化为单目标优化问题。算法为每个目标设置权值,通过加权的方式将多目标转化为单目标。经过改变权值大小,多次求解MOPs 可以得到多个最优解,构成非支配解集[1]。 第二类算法,直接求解MOPs。这类算法主要依靠进化算法。进化算法这种面向种群的全局搜索法,对于直接得到非支配解集是非常有效的。基于进化算法的多目标优化算法被称为多目标进化算法。根据其特性,多目标进化算法可以划分为两代[2]。 (1)第一代算法:以适应度共享机制为分布性策略,并利用Pareto支配关系设计适应度函数。代表算法如下。VEGA将种群划分为若干子种群,每个子种群相对于一个目标进行优化,最终将子种群合并。MOGA根据解的支配关系,为每个解分配等级,算法按照等级为解设置适应度函数。NSGA采用非支配排序的思想为每个解分配虚拟适应度值,在进化过程中,算法根据虚拟适应度值采用比例选择法选择下一代。NPGA根据支配关系采用锦标赛选择法,当解的支配关系相同时,算法使用小生境技术选择最优的解进入下一代。 (2)第二代算法:以精英解保留机制为特征,并提出了多种较好的分布性策略。代表算法如下。NSGA-II降低了非支配排序的复杂度,并提出了基于拥挤距离的分布性策略。SPEA2提出了新的适应度分配策略和基于环境选择的分布性策略。PESA-II根据网络超格选择个体并使用了基于拥挤系数的分布性策略。
NSGA-II 算法实例 目前的多目标优化算法有很多, Kalyanmoy Deb 的带精英策略的快速非支配排序遗传算法(NSGA-II) 无疑是其中应用最为广泛也是最为成功的一种。本文用的算法是MATLAB 自带的函数gamultiobj ,该函数是基于NSGA-II 改进的一种多目标优化算法。 一、 数值例子 多目标优化问题 424221********* 4224212212112 12min (,)10min (,)55..55 f x x x x x x x x x f x x x x x x x x x s t x =-++-=-++-≤≤??-≤≤? 二、 Matlab 文件 1. 适应值函数m 文件: function y=f(x) y(1)=x(1)^4-10*x(1)^2+x(1)*x(2)+x(2)^4-x(1)^2*x(2)^2; y(2)=x(2)^4-x(1)^2*x(2)^2+x(1)^4+x(1)*x(2); 2. 调用gamultiobj 函数,及参数设置: clear clc fitnessfcn=@f; %适应度函数句柄 nvars=2; %变量个数 lb=[-5,-5]; %下限 ub=[5,5]; %上限 A=[];b=[]; %线性不等式约束 Aeq=[];beq=[]; %线性等式约束 options=gaoptimset('paretoFraction',0.3,'populationsize',100,'generations', 200,'stallGenLimit',200,'TolFun',1e-100,'PlotFcns',@gaplotpareto); % 最优个体系数paretoFraction 为0.3;种群大小populationsize 为100,最大进化代数generations 为200, % 停止代数stallGenLimit 为200, 适应度函数偏差TolFun 设为1e-100,函数gaplotpareto :绘制Pareto 前端 [x,fval]=gamultiobj(fitnessfcn,nvars,A,b,Aeq,beq,lb,ub,options)
前麦弗逊悬架和后多连杆 悬架设计 This manuscript was revised on November 28, 2020
存档编号 华北水利水电大学North China University of Water Resources and Electric Power 毕业设计 题目乘用车悬架系统设计 学院机械学院 专业机械设计制造及其自动化 姓名 学号 指导教师 完成时间 教务处制 独立完成与诚信声明 本人郑重声明:所提交的毕业设计(论文)是本人在指导教师的指导下,独立工作所取得的成果并撰写完成的,郑重确认没有剽窃、抄袭等违反学术道德、学术规范的侵权行为。文中除已经标注引用的内容外,不包含其他人或集体已经发表或撰写过的研究成果。对本文的研究做出重要贡献的个人和集体,均已在文中作了明确的说明并表示了谢意。本人完全意识到本声明的法律后果由本人承担。
毕业设计(论文)作者签名:指导导师签名: 签字日期:签字日期: 毕业设计(论文)版权使用授权书 本人完全了解华北水利水电大学有关保管、使用毕业设计(论文)的规定。特授权华北水利水电大学可以将毕业设计(论文)的全部或部分内容公开和编入有关数据库提供检索,并采用影印、缩印或扫描等复制手段复制、保存、汇编以供查阅和借阅。同意学校向国家有关部门或机构送交毕业设计(论文)原件或复印件和电子文档(涉密的成果在解密后应遵守此规定)。 毕业设计(论文)作者签名:导师签名: 签字日期:签字日期:
摘要 悬架的主要功能是传递作用在车轮和车身之间的一切力和力矩,缓冲传给车身的冲击载荷,通过减震器衰减由车轮引起的簧上震动,保证汽车行驶的平顺性,保证车轮在路面不平和载荷变化时有理想的运动特征,增强汽车的操纵稳定性,轻便性。 本文首先论述了悬架的分类、优缺点及国内外的研究现状,然后以日产天籁为设计参照,使用传统设计方法(非优化设计)设计计算前麦弗逊悬架和后多连杆悬架,涵盖了选定悬架质量分配系数,选定车震频率、偏频比,计算悬架静挠度和动挠度,减震器行程及工作缸内径的选择及螺旋弹簧的直径、工作圈数设计等。 本次设计中使用UG软件做出三维模型,再进行装配,装配完成后,将其分别导入ADAMS/car和adams/view中进行仿真分析和动画仿真,得出汽车行驶时的仿真动画、整车车轮前束角、整车车轮外倾角、前轮主销内倾角、前轮主销后倾角、摩擦半径、后轮侧倾中心坐标的相关数据变化。 在介绍了主动悬架和半主动悬架之后,阐述了他们之间以及相对于传统悬架之间的优缺点、前麦弗逊悬架和后多连杆悬架减震器可行的改良方法,以及未来研究方向,最后对此次设计设计进行一次回顾,总结设计中的收获和存在的问题。 关键字:麦弗逊式悬架、多连杆悬架、三维模型、运动仿真、仿真分析 中图分类号:+1
悬架系统设计步骤 在此主要是分析竞争车型的底盘布置。底盘布置首先要确定出轮胎、悬架形式、转向系统、发动机、传动轴、油箱、地板、前纵梁结构(满足碰撞)等,因为这些重要的参数,如轮胎型号、悬架尺寸、发动机布置、驱动形式、燃油种类等在开发过程中要尽可能早地确定下来。在此基础上,线束、管路、减振器、发动机悬置等才能继续下去 悬架选择 对各种后悬架结构型式进行优缺点比较,包括对后部轮罩间空间尺寸的分析比较,进行后悬架结构的选择。 常见的后悬架结构型式有:扭转梁式、拖曳臂式、多连杆式。 扭转梁式悬架 优点: 1.与车身连接简单,易于装配。 2.结构简单,部件少,易分装。 3.垂直方向尺寸紧凑。 4.底板平整,有利于油箱和后备胎的布置。 5.汽车侧倾时,除扭转梁外,有的纵臂也会产生扭转变形,起到横向稳定作用, 若还需更大的悬架侧倾角刚度,还可布置横向稳定杆。 6.两侧车轮运转不均衡时外倾具有良好的回复作用。 7.在车身摇摆时具有较好的前束控制能力。 8.车轮运动特性比较好,操纵稳定性很好,尤其是在平整的道路情况下。 9.通过障碍的轴距具有相当好的加大能力,通过性好。 10.如果采用连续焊接的话,强度较好。 缺点: 1.对横向扭转梁和纵向拖臂的连续焊接质量要求较高。 2.不能很好地协调轮迹。 3.整车动态性能对轴荷从空载到满载的变化比较敏感。 4.但这种悬架在侧向力作用时,呈过度转向趋势。另外,扭转梁因强度关系,允 许承受的载荷受到限制。 扭转梁式悬架结构简单、成本低,在一些前置前驱汽车的后悬架上应用较多。 拖曳臂式悬架 优点: 1.Y轴和X轴方向尺寸紧凑,非常有利于后乘舱(尤其是轮罩间宽度尺寸较大) 和下底板备胎及油箱的布置。 2.与车身的连接简单,易于装配。 3.结构简单,零件少且易于分装; 4.由于没有衬套,滞后作用小。 5.可考虑后驱。 缺点: 1.由于沿着控制臂相对车身转轴方向控制臂较大的长宽比,侧向力对前束将产生 不利的影响。 2.车身摇摆(body roll)对外倾产生不利影响;(适当的控制臂转轴有可能改善外 倾的回复能力,但这导致轮罩间宽度尺寸的减小。)
某SUV汽车多连杆后独立悬架设计与分析 摘要 近年来,随着汽车工业的快速发展,人们对汽车的操纵稳定性和乘坐舒适性的要求越来越高,因此对汽车的悬架系统也提出了更高的要求。多连杆式独立悬架以其综合指标过硬、兼顾操控性和行驶舒适性在内的多种特性受到广大消费者的青睐。然而多年以来,结构复杂、成本高昂、舒适性较好的多连杆式独立悬架只用于豪华轿车,或少部分定位较高端的中高级别轿车。伴随着汽车制造技术的不断提升,零部件单位生产成本逐步降低,汽车厂商们开始更多的在低端轿车上装备这种结构复杂、性能优异的悬架,以此来提高车辆在行驶过程中的综合表现,并在同级别车型中形成鹤立鸡群的效应。我这次设计的奔驰GLK300的悬架系统正是符合大众的需求,采用多连杆式独立悬架。 本次设计的主要内容是:奔驰GLK300SUV的后悬架系统的设计,后悬架采用目前较为流行的多连杆式独立悬架系统。减振器采用双作用液力减振器,并对其进行参数计算。对导向机构和横向稳定杆进行结构计算及强度校核。采用CATIA软件对多连杆式独立悬架的零件进行建模并对悬架进行装配。同时采用CATIA软件对悬架的性能进行分析,论证悬架系统设计参数的合理正确性。 在这次设计中,采用了性能较好的多连杆式独立悬架系统,虽然多连杆式独立悬架还未广泛应用于中低端轿车,但随着成本的降低,此悬架系统将越来越多的得到使用。通过CATIA软件对悬架系统的建模及对其进行仿真优化,验证了多连杆式独立悬架的优异性能。因此,这次设计的悬架系统具有广泛的发展前景。 关键词:多连杆;独立悬架;仿真优化;CATIA
A SUV multi-link independent rear suspension of automobile design and analysis Abstract In recent years, with the rapid development of automobile industry, people on the handling stability and riding comfort of the increasingly high demand, so the car's suspension system is also put forward higher requirements. Multi-link independent suspension with its comprehensive index, consideration of different characteristics of excellent handling and ride comfort, favored by the vast number of consumers. However, over the years, complex structure, high cost, comfort good multi-link independent suspension is used only for luxury cars, or a few more high-end positioning in high-grade car. Along with the automobile manufacturing technology continues to improve, spare parts production costs per unit decrease gradually, the automobile manufacturers began more equipment of this structure in the low-end cars complex, excellent performance of suspension, in order to improve the comprehensive performance of vehicles in the process, and the effect of forming in the same stand head and shoulders above others don't models. Suspension system I the design of the Mercedes-Benz GLK300 is in line with the needs of the public, the multi-link independent suspension. The design of the main content is: the design of rear suspension system of the Mercedes-Benz GLK300SUV, rear suspension uses the popular multi-link independent suspension system. Damper adopts double acting hydraulic shock absorber, and parameter calculation of its. The guide mechanism and a transverse stable rod structure calculation and strength check. The components of CATIA software for multi-link independent suspension modeling and assembly of suspension. At the same time were analyzed by CATIA software performance of suspension, reasonable design parameter argumentation suspension system. In this design, the multi-link independent suspension system with better performance, although the multi-link independent suspension is not widely used in the low-end cars, but with lower costs, this suspension system will be more and more use. Through the CATIA software model of suspension system and simulation and optimization of its, verify the multi-link independent suspension performance. Therefore, the design of the suspension system has a broad development prospects. Keywords:Connecting rod;independent suspension ;Simulation optimization;CATIA
多目标优化方法 基本概述 几个概念 优化方法 一、多目标优化基本概述 现今,多目标优化问题应用越来越广,涉及诸多领域。在日常生活和工程中,经常要求不只一项指标达到最优,往往要求多项指标同时达到最优,大量的问题都可以归结为一类在某种约束条件下使多个目标同时达到最优的多目标优化问题。例如:在机械加工时,在进给切削中,为选择合适的切削速度和进给量,提出目标:1)机械加工成本最低2)生产率低3)刀具寿命最长;同时还要满足进给量小于加工余量、刀具强度等约束条件。 多目标优化的数学模型可以表示为: X=[x1,x2,…,x n ]T ---------- n维向量 min F(X)=[f1(X),f2(X),…,f n(X)]T----------向量形式的目标函数 . g i(X)≤0,(i=1,2,…,m) h j(X)=0,(j=1,2,…,k)--------设计变量应满足的约束条件 多目标优化问题是一个比较复杂的问题,相比于单目标优化问
题,在多目标优化问题中,约束要求是各自独立的,所以无法直接比较任意两个解的优劣。 二、多目标优化中几个概念:最优解,劣解,非劣解。 最优解X*:就是在X*所在的区间D中其函数值比其他任何点的函数值要小即f(X*)≤f(X),则X*为优化问题的最优解。 劣解X*:在D中存在X使其函数值小于解的函数值,即 f(x)≤f(X*), 即存在比解更优的点。 非劣解X*:在区间D中不存在X使f(X)全部小于解的函数值 f(X*). 如图:在[0,1]中X*=1为最优解 在[0,2]中X*=a为劣解
在[1,2]中X*=b为非劣解 多目标优化问题中绝对最优解存在可能性一般很小,而劣解没有意义,所以通常去求其非劣解来解决问题。 三、多目标优化方法 多目标优化方法主要有两大类: 1)直接法:直接求出非劣解,然后再选择较好的解 将多目标优化问题转化为单目标优化问题。 2)间接法如:主要目标法、统一目标法、功效系数法等。 将多目标优化问题转化为一系列单目标优化问题。 如:分层系列法等。 1、主要目标法 求解时从多目标中选择一个目标作为主要目标,而其他目标只需满足一定要求即可,因此可将这些目标转化成约束条件,也就是用约束条件的形式保证其他目标不致太差,这样就变成单目标处理方法。 例如:多目标函数f1(x),f2(x),.....,f n(x)中选择f k(x)作为主要目标,这时问题变为求 min f k(x) D={x|f min≤f i(x)≤f max},D为解所对应的其他目标函数应满足上下限。 2、统一目标法 通过某种方法将原来多目标函数构造成一个新的目标函数,
中级轿车多连杆后悬架设计 --------几何学定义(GEOMETRY) 二零零七年三月六日
序言 本文档主要从整车总布置角度出发,在总体概念设计阶段进行悬架的选型、硬点、几何定义设计,从而确定悬架各相关部件的详细结构设计边界和输入信息。
拖曳臂(TRAILING ARM)后悬架 优点: ?沿Y和Z方向的尺寸较小,因此对于后部车厢布置非常有利,能有较好的空间利用率(尤其是轮罩之间的宽度较大)和容易布置备胎和油箱。 ?悬架和车身容易装配 ?悬架结构简单: 零部件少、容易分装 ?由于没有衬套,滞后性较小 ?容易保护后驱 Compatibility with traction 缺点: ?在沿着车身与拖曳臂的旋转轴,拖曳臂的长度和宽度有比较大的杠杆比,因此当存在侧向载荷时,有不利的前束。 ?在车身的横向翻转时有不利的车轮外倾角(如果有一个比较合适的悬转轴,有可能纠正外倾角,但这样会影响轮罩之间的宽度。) ?不好的调整潜能: 所有的几何特征和相应变形参数都是相关联的。 ?由于缺少衬套,不能进行有效的衰减震动。
扭曲梁(TWIST AXLE)后悬架 优点: ?悬架和车身容易装配 ?悬架结构简单: 零部件少、容易分装 ?垂直尺寸较小 ?水平方向尺寸较小,有利于布置备胎和油箱 ?在车轮上下跳动不同时,可以进行自动调整车轮外倾角?当车身有横向倾斜时,可以进行前束自动调整 ?有好的操纵性能,尤其是在光滑路面 ?当存在障碍物时,有增大轮距的能力 ?如果设计要求拉焊,有比较大的抗误操作强度 缺点: ?对横向和纵向的梁的拉焊工艺有比较严格的质量要求?不利于进行驱动 ?对车辆动态最小化比较敏感–轴上的满载 变化 Skoda Fabia
多目标优化算法与求解策略 2多目标优化综述 2.1多目标优化的基本概念 多目标优化问题(Multi-objective Optimization Problem,MOP)起源于许多实际复杂系统的设计、建模和规划问题,这些系统所在的领域包括工业制造、城市运输、资本预算、森林管理、水库管理、新城市的布局和美化、能量分配等等。几乎每个重要的现实生活中的决策问题都要在考虑不同的约束的同时处理若干相互冲突的目标,这些问题都涉及多个目标的优化,这些目标并不是独立存在的,它们往往是祸合在一起的互相竞争的目标,每个目标具有不同的物理意义和量纲。它们的竞争性和复杂性使得对其优化变得困难。 多目标最优化是近20多年来迅速发展起来的应用数学的一门新兴学科。它研究向量目标函数满足一定约束条件时在某种意义下的最优化问题。由于现实世界的大量问题,都可归结为含有多个目标的最优化问题,自70年代以来,对于多目标最优化的研究,在国内和国际上都引起了人们极大的关注和重视。特别是近10多年来,理论探索不断深入,应用范围日益广泛,研究队伍迅速壮大,显示出勃勃生机。同时,随着对社会经济和工程设计中大型复杂系统研究的深入,多目标最优化的理论和方法也不断地受到严峻挑战并得到快速发展。近几年来,将遗传算法(Genetic Algorithm,GA)应用于多目标优化问题成为研究热点,这种算法通常称作多目标优化进化算法或多目标优化遗传算法。由于遗传算法的基本特点是多方向和全局搜索,这使得带有潜在解的种群能够一代一代地维持下来。从种群到种群的方法对于搜索Pareto解来说是十分有益的。 一般说来,科学研究与工程实践中许多优化问题大都是多目标优化问题。多目标优化问题中各目标之间通过决策变量相互制约,对其中一个目标优化必须以其它目标作为代价,而且各目标的单位又往往不一致,因此很难客观地评价多目标问题解的优劣性。与单目标优化问题的本质区别在于,多目标优化问题的解不是唯一的,而是存在一个最优解集合,集合中
第六章最优化数学模型 §1 最优化问题 1.1 最优化问题概念 1.2 最优化问题分类 1.3 最优化问题数学模型 §2 经典最优化方法 2.1 无约束条件极值 2.2 等式约束条件极值2.3 不等式约束条件极值 §3 线性规划 3.1 线性规划 3.2 整数规划 §4 最优化问题数值算法4.1 直接搜索法 4.2 梯度法 4.3 罚函数法 §5 多目标优化问题 5.1 多目标优化问题 5.2 单目标化解法 5.3 多重优化解法 5.4 目标关联函数解法5.5 投资收益风险问题
第六章 最优化问题数学模型 §1 最优化问题 1.1 最优化问题概念 (1)最优化问题 在工业、农业、交通运输、商业、国防、建筑、通信、政府机关等各部门各领域的实际工作中,我们经常会遇到求函数的极值或最大值最小值问题,这一类问题我们称之为最优化问题。而求解最优化问题的数学方法被称为最优化方法。它主要解决最优生产计划、最优分配、最佳设计、最优决策、最优管理等求函数最大值最小值问题。 最优化问题的目的有两个:①求出满足一定条件下,函数的极值或最大值最小值;②求出取得极值时变量的取值。 最优化问题所涉及的内容种类繁多,有的十分复杂,但是它们都有共同的关键因素:变量,约束条件和目标函数。 (2)变量 变量是指最优化问题中所涉及的与约束条件和目标函数有关的待确定的量。一般来说,它们都有一些限制条件(约束条件),与目标函数紧密关联。 设问题中涉及的变量为n x x x ,,,21 ;我们常常也用),,,(21n x x x X =表示。 (3)约束条件 在最优化问题中,求目标函数的极值时,变量必须满足的限制称为约束条件。 例如,许多实际问题变量要求必须非负,这是一种限制;在研究电路优化设计问题时,变量必须服从电路基本定律,这也是一种限制等等。在研究问题时,这些限制我们必须用数学表达式准确地描述它们。 用数学语言描述约束条件一般来说有两种: 等式约束条件 m i X g i ,,2,1,0)( == 不等式约束条件 r i X h i ,,2,1, 0)( =≥ 或 r i X h i ,,2,1, 0)( =≤ 注:在最优化问题研究中,由于解的存在性十分复杂,一般来说,我们不考虑不等式约束条件0)(>X h 或0)( 用于约束多目标优化问题的双群体差分进化算 法精编 Document number:WTT-LKK-GBB-08921-EIGG-22986 用于约束多目标优化问题的双群体差分进化算法 孟红云 1 张小华2刘三阳1 (1.西安电子科技大学应用数学系,西安,710071; 2.西安电子科技大学智能信息处理研究所,西安,710071)摘要:首先给出一种改进的差分进化算法,然后提出一 种基于双群体搜索机制的求解约束多目标优化问题的差分 进化算法.该算法同时使用两个群体,其中一个用于保存 搜索过程中找到的可行解,另一个用于记录在搜索过程中 得到的部分具有某些优良特性的不可行解,避免了构造罚 函数和直接删除不可行解.此外,将本文算法、NSGA-Ⅱ和SPEA的时间复杂度进行比较表明,NSGA-Ⅱ最优,本文算法与SPEA相当.对经典测试函数的仿真结果表明,与NSGA-Ⅱ相比较,本文算法在均匀性及逼近性方面均具有一定的优势. 关键字:差分进化算法;约束优化问题;多目标优化问题; 中图分类号:TP18 1 引言 达尔文的自然选择机理和个体的学习能力推动进化算 法的出现和发展,用进化算法求解优化问题已成为一个研 究的热点[1-3].但目前研究最多的却是无约束优化问题.然而,在科学研究和工程实践中,许多实际问题最终都归结 为求解一个带有约束条件的函数优化问题,因此研究基于 进化算法求解约束优化问题是非常有必要的.不失一般 性,以最小化问题为例,约束优化问题(Constrained Optimization Problem ,COP )可定义如下: )(COP ()()()()q j x h p i x g t s x f x f x f x F j i k R x n ,,1,0)( ,,1,0)( ..,,,)(min 21 ===≤=∈ (1) 其中)(x F 为目标函数,)(),(x h x g j i 称为约束条件, n n R x x x x ∈=),,,(21 称为n 维决策向量.将满足所有约束条件的 解空间S 称为(1)的可行域.特别的,当1=k 时,(1)为单目 标优化问题;当1>k 时,(1)为多目标优化问题.)(x g i 为 第i 个不等式约束,)(x h j 是第j 个等式约束.另一方面,对于等式约束0)(=x h j 可通过容许误差(也称容忍度)0>δ将它转 化为两个不等式约束: ?????≤--≤-0)(0)(δδx h x h j j (2) 故在以后讨论问题时,仅考虑带不等式约束的优化问题.进一步,如果x 使得不等式约束0)(=x g i ,则称约束() x g i 在x 处是积极的.在搜索空间S 中,满足约束条件的决策变量x 称为可行解,否则称为不可行解. 定义1(全局最优解)()**2 *1*,,,n x x x x =是COP 的全局最优解,是指S x ∈*且)(*x F 不劣于可行域内任意解y 所对应的目标 函数)(y F ,表示为)( )(*y F x F . 对于单目标优化问题, )( )(*y F x F 等价为)()(*y F x F ≤,而对于多目标优化问题是指不 存在y ,使得)(y F Pareto 优于)(*x F . 目前,进化算法用于无约束优化问题的文献居多,与 之比较,对约束优化问题的研究相对较少[4-6]。文[7] 对当前基于进化算法的各种约束处理方法进行了较为详细的综述. 对于约束优化问题的约束处理方法基本上分为两类:基于 罚函数的约束处理技术和基于多目标优化技术的约束处理 多目标优化的求解方法 多目标优化(MOP)就是数学规划的一个重要分支,就是多于一个的数值目标函数在给定区域上的最优化问题。 多目标优化问题的数学形式可以描述为如下: 多目标优化方法本质就是将多目标优化中的各分目标函数,经处理或数学变换,转变成一个单目标函数,然后采用单目标优化技术求解。目前主要有以下方法: (1)评价函数法。常用的方法有:线性加权与法、极大极小法、理想点法。评价函数法的实质就是通过构造评价函数式把多目标转化为单目标。 (2)交互规划法。不直接使用评价函数的表达式,而就是使决策者参与到求解过程,控制优化的进行过程,使分析与决策交替进行,这种方法称为交互规划法。常用的方法有:逐步宽容法、权衡比替代法,逐次线性加权与法等。 (3)分层求解法。按目标函数的重要程度进行排序,然后按这个排序依次进行单目标的优化求解,以最终得到的解作为多目标优化的最优解。 而这些主要就是通过算法来实现的, 一直以来很多专家学者采用不同算法解决多目标优化问题, 如多目标进化算法、多目标粒子群算法与蚁群算法、模拟退火算法及人工免疫系统等。 在工程应用、生产管理以及国防建设等实际问题中很多优化问题都就是多目标优化问题, 它的应用很广泛。 1)物资调运车辆路径问题 某部门要将几个仓库里的物资调拨到其她若干个销售点去, 在制定调拨计划时一般就要考虑两个目标, 即在运输过程中所要走的公里数最少与总的运输费用最低, 这就是含有两个目标的优化问题。利用首次适配递减算法与标准蚁群算法对救灾物资运输问题求解, 求得完成运输任务的最少时间, 将所得结果进行了比较。 2)设计 如工厂在设计某种新产品的生产工艺过程时, 通常都要求产量高、质量好、成本低、消耗少及利润高等, 这就就是一个含有五个目标的最优化问题; 国防部门在设计导弹时, 要考虑导弹的射程要远、精度要最高、重量要最轻以及消耗燃料要最省等,这就就是一个含有四个目标的最优化问题。Jo等人将遗传算法与有限元模拟软件结合 毕业论文 题目大学生方程式赛车设计(前、后悬架设计) 2013年05月30 日 大学生方程式赛车设计(前、后悬架设计) 摘要 本设计为中国大学生方程式汽车大赛(Formula SAE - China,简称"FSAE")赛车前、后悬架总成设计。悬架总成是汽车的一个重要组成部分,它的功用是把路面作用于车轮上的垂直反力、纵向反力和侧向反力以及这些反力所造成的力矩传递到车架上,以保证汽车的正常行驶。 本次设计根据大学生方程式汽车大赛的比赛规则及赛车设计具体参数要求,参考各种赛车悬架资料,分析各种悬架类型的优缺点,参考国际国内方程式汽车大赛的赛车设计方案,初选出了多连杆悬架和双横臂悬架,然后进行进一步的分析,并最终确定适合赛车运动的悬架形式---不等长双横臂式螺旋弹簧独立悬架。 设计中运用运动学原理分析各机构运动关系、确定尺寸参数,运用理论力学、材料力学知识计算悬架各部件的受力,以满足各零部件的强度要求。本次设计运用了CAD2008画平面图,并运用UG NX 7.0建立悬架模型,进行运动分析和高级仿真。 关键词:悬架,减振器,导向机构,定位参数,建模,运动分析 This design for Chinese University students formula car(front and rear suspension design) ABSTRACT This design for Chinese University students formula car contest (Formula SAE-China, referred to as "FSAE.") racing front and rear suspension design. Suspension Assembly is an important component of the car, its function is to act on the pavement on vertical force, longitudinal force and lateral force as well as the reaction caused by the moment passed to the frame, in order to ensure that the vehicle's normal driving.This design according to the formula of college car racing rules and concrete parameters design requirements, refer to the data of many racing suspension , analysis of the advantages and disadvantages of various suspension type, and ultimately determine the suitable for motor sport suspension---differ long double wishbone arm typed spiral spring independent suspension. Determine the use of unque length double wishbonecoil springindependent suspension,calculated and verified, to the rule of the game,and the actual needs of the cars’s roll center,select the suspension of the car-oriented institutions,and then according to the positioning of the wheel parameterspreliminary design calcuations on the dimensions of the upper and lower wishbone front and rear suspension and frame size as well as track and wheelbase dimensions,and the subsequent stress analysis under various conditions on the suspension,and determine the final suspension size and locationaramerers.In the design application kinematics analysis of the relationship between the various bodies exercise、determine the size parameters, use of theoretical mechanics, material mechanics calculation of the various components of suspension force to meet the strength用于约束多目标优化问题的双群体差分进化算法精编
多目标优化的求解方法
大学生方程式赛车设计(前后悬架设计)(有cad图+三维图)
相关主题
文本预览