习题1答案
1.1 单项选择题
(1) A (2)C (3)A (4) A (5)A
(6) A (7)C (8)C (9) D (10)C
1.2 填空题
(1)硬件系统、软件系统
(2)时钟、复位
(3)XTAL1、XTAL2、RST、EA
(4)片内数据存储器、片内程序存储器、片外数据存储器、片外程序存储器
(5)时钟电路
(6)程序存储器
(7)工作寄存器组、位寻址区、用户RAM区
(8)1us、2us
(9)上电复位电路、按键复位电路
(10)2、高
1.3
答:
单片微型计算机是指集成在一个芯片上的微型计算机,它的各种功能部件,包括CPU (Central Processing Unit)、随机存取存储器RAM(Random Access Memory)、只读存储器ROM(Read-only Memory)、基本输入/输出(Input/Output,简称I/O)接口电路、定时器/计数器等都制作在一块集成芯片上,构成一个完整的微型计算机,可以实现微型计算机的基本功能。
单片机应用系统是以单片机为核心,配以输入、输出、显示、控制等外围电路和软件,能实现一种或多种功能的实用系统。
单片机应用系统是由硬件和软件组成的,硬件是应用系统的基础,软件则是在硬件的基础上对其资源进行合理调配和使用,从而完成应用系统所要求的任务,二者相互依赖,缺一不可。
1.4
答:
1.5
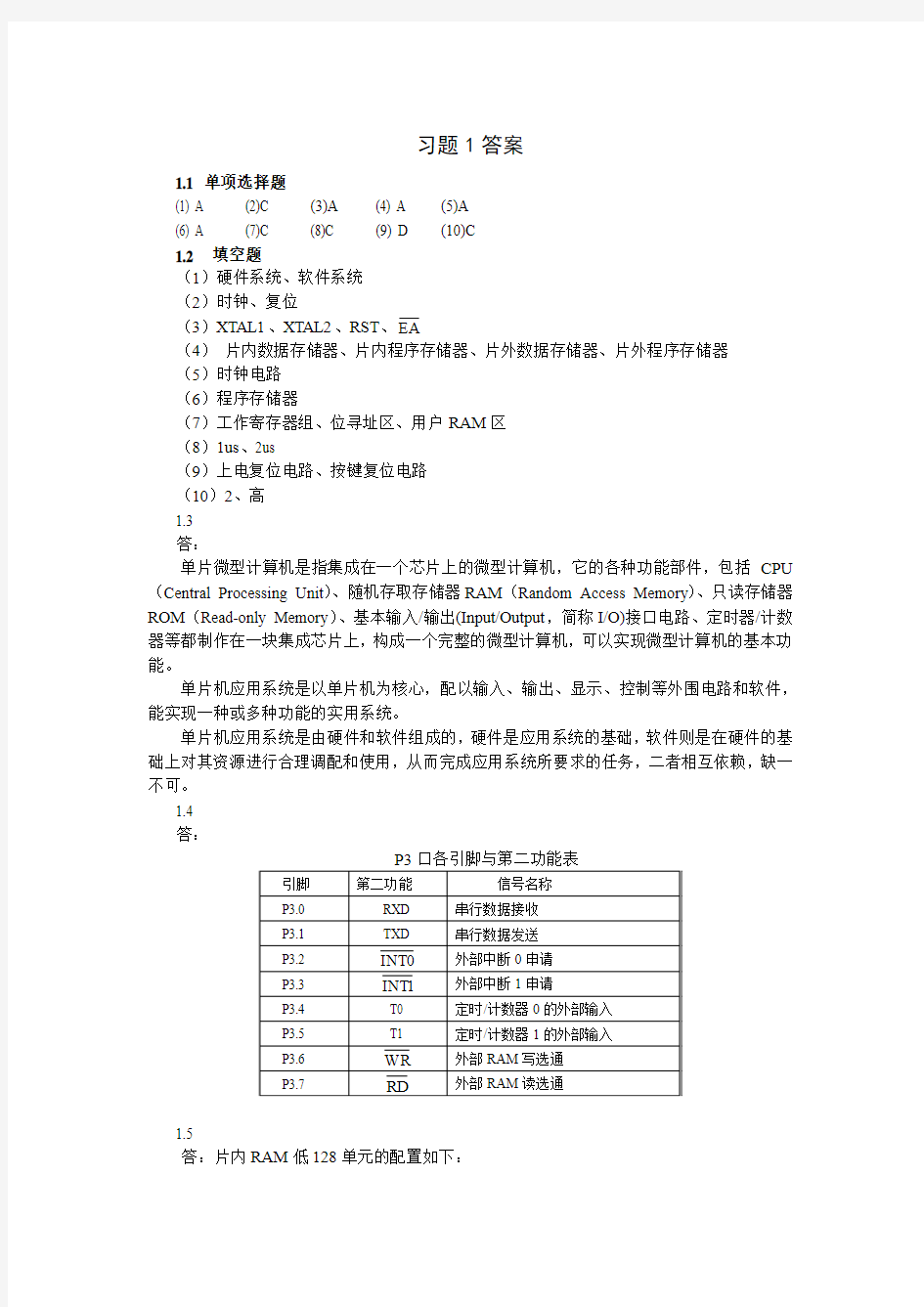
答:片内RAM低128单元的配置如下:
单元,既可作为一般RAM单元使用,进行字节操作,也可以对单元中每一位进行位操作;在内部RAM低128单元中,通用寄存器占去了32个单元,位寻址区占去了16个单元,剩下80个单元,这就是供用户使用的一般RAM区,其单元地址为30H~7FH。
片内RAM高128单元安排有21个特殊功能寄存器,其他空闲单元用户不能使用。
1.6
答:有21个可寻址的特殊功能寄存器,它们不连续地分布在片内RAM的高128单元中,尽管其中还有许多空闲地址,但用户不能使用。另外还有一个不可寻址的特殊功能寄存器,即程序计数器PC,它不占据RAM单元,在物理上是独立的。
在可寻址的21个特殊功能寄存器中,有11个寄存器不仅可以字节寻址,也可以进行位寻址。
1.7
答:
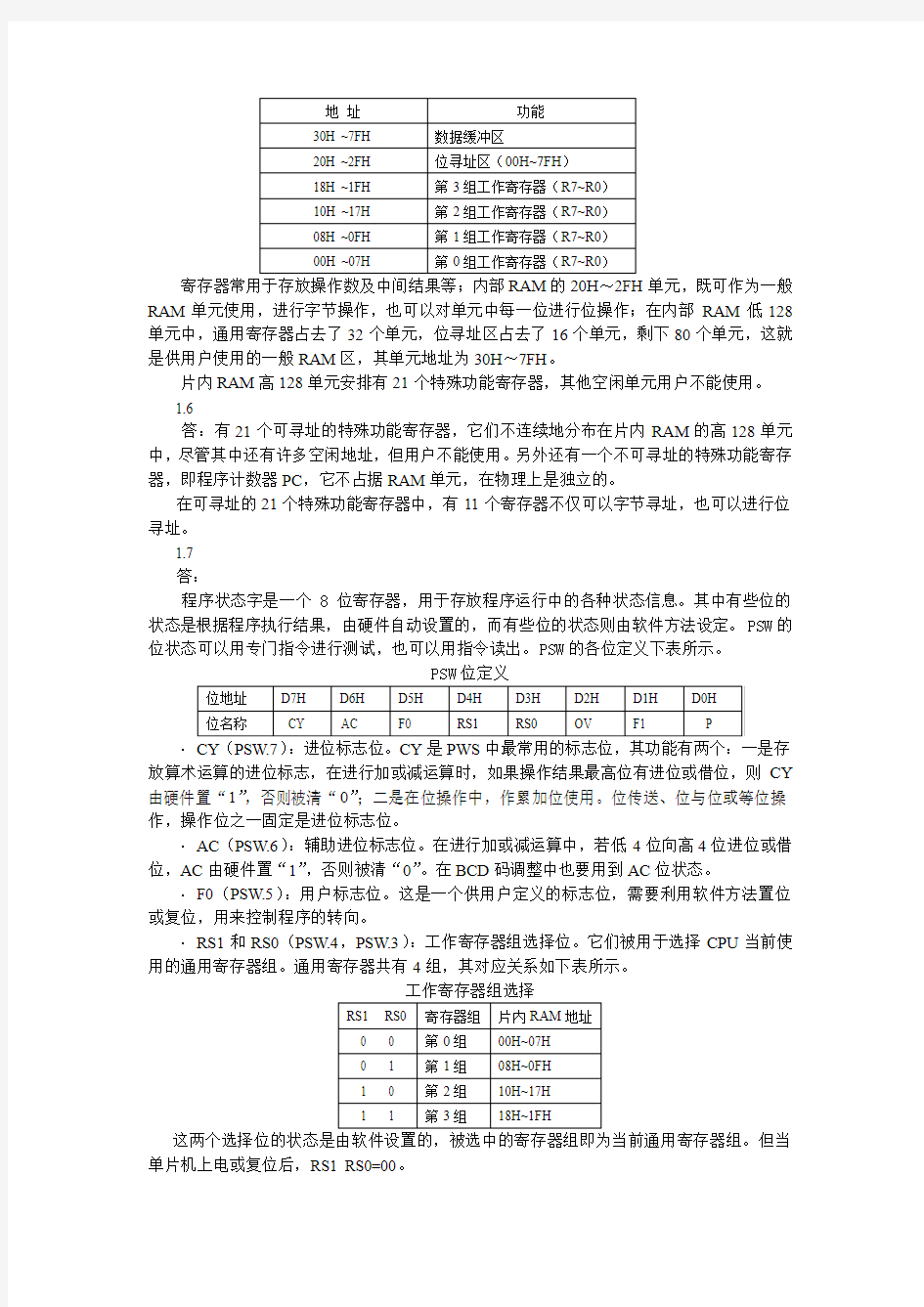
程序状态字是一个8位寄存器,用于存放程序运行中的各种状态信息。其中有些位的状态是根据程序执行结果,由硬件自动设置的,而有些位的状态则由软件方法设定。PSW的位状态可以用专门指令进行测试,也可以用指令读出。PSW的各位定义下表所示。
PSW位定义
·CY(PSW.7):进位标志位。CY是PWS中最常用的标志位,其功能有两个:一是存放算术运算的进位标志,在进行加或减运算时,如果操作结果最高位有进位或借位,则CY 由硬件置“1”,否则被清“0”;二是在位操作中,作累加位使用。位传送、位与位或等位操作,操作位之一固定是进位标志位。
·AC(PSW.6):辅助进位标志位。在进行加或减运算中,若低4位向高4位进位或借位,AC由硬件置“1”,否则被清“0”。在BCD码调整中也要用到AC位状态。
·F0(PSW.5):用户标志位。这是一个供用户定义的标志位,需要利用软件方法置位或复位,用来控制程序的转向。
·RS1和RS0(PSW.4,PSW.3):工作寄存器组选择位。它们被用于选择CPU当前使用的通用寄存器组。通用寄存器共有4组,其对应关系如下表所示。
工作寄存器组选择
这两个选择位的状态是由软件设置的,被选中的寄存器组即为当前通用寄存器组。但当单片机上电或复位后,RS1 RS0=00。
·OV(PSW.2):溢出标志位。在带符号数加减运算中,OV=1表示加减运算超出了累加器A所能表示的符号数有效范围(-128 ~+127),即产生了溢出,因此运算结果是错误的;OV=0表示运算正确,即无溢出产生。
在乘法运算中,OV=1表示乘积超过255,即乘积分别在B与A中;否则,OV=0,表示乘积只在A中。
在除法运算中,OV=1表示除数为0,除法不能进行;否则,OV=0,除数不为0,除法可正常进行。
·F1(PSW.1):保留未使用。
·P(PSW.0):奇偶标志位。P标志位表明累加器A中内容的奇偶性,如果A中有奇数个“1”,则P置“1”,否则置“0”。凡是改变累加器A中内容的指令均会影响P标志位。
此标志位对串行通信中的数据传输有重要的意义。在串行通信中常采用奇偶校验的办法来校验数据传输的可靠性。
1.8
答:
0003H~002AH这40个单元被均匀地分为5段,作为5个中断源的中断地址区。其中:0003H~000AH 外部中断0中断地址区
000BH~0012H 定时器/计数器0中断地址区
0013H~001AH 外部中断1中断地址区
001BH~0022H 定时器/计数器1中断地址区
0023H~002AH 串行中断地址区
中断响应后,按中断种类,自动转到各中断区的首地址去执行程序。因此在中断地址区中理应存放中断服务程序。但通常情况下,8个单元难以存下一个完整的中断服务程序,因此通常也是从中断地址区首地址开始存放一条无条件转移指令,以便中断响应后,通过中断地址区,再转到中断服务程序的实际入口地址。
1.9
答:
当需要扩展存储器时,低8位地址A7~A0和8位数据D7~D0由P0口分时传送,高8位地址A15~A8由P2口传送。
因此,只有在没有扩展片外存储器的系统中,P0口和P2口的每一位才可作为双向I/O 端口使用。
1.10
答:
单片机晶振电路
一般地,电容C1和C2取30pF左右,晶体的振荡频率范围是1.2MHz~12 MHz。如果
晶体振荡频率高,则系统的时钟频率也高,单片机运行速度也就越快。MCS-51在通常应用情况下,使用振荡频率为的6MHz或12MHz的晶振,如果系统中使用了单片机的串行口通信,则一般采用振荡频率为11.059MHz的晶振。
1.11
答:
规定一个机器周期的宽度为12个振荡脉冲周期,因此机器周期就是振荡脉冲的十二分频。
当振荡脉冲频率为12 MHz时, 一个机器周期为1μs;当振荡脉冲频率为6 MHz时,一个机器周期为2 μs。
1.12
答:
(a)上电复位电路(b)按键复位电路
单片机常见的复位电路
图(a)为上电复位电路,它是利用电容充电来实现的。在接电瞬间,RST端的电位与VCC相同,随着充电电流的减少,RST的电位逐渐下降。只要保证RST为高电平的时间大于两个机器周期,便能正常复位。
图(b)为按键复位电路。该电路除具有上电复位功能外,若要复位,只需按图(b)中的RESET键,此时电源VCC经电阻R1、R2分压,在RST端产生一个复位高电平。
习题2答案
2.1 单项选择题
(1)C (2)A (3)B (4)A (5)D
2.2
答:
单片机开发过程所用的设备与软件称为单片机开发系统或开发工具。
单片机开发系统包括计算机、单片机在线仿真器、开发工具软件、编程器等。连接方法如下图所示。
单片机开发系统连接方法示意图
2.3
答:单片机应用系统的开发过程如下:
设计电路图→制作电路板→程序设计→硬软件联调→程序下载→产品测试
2.4
答:
1.在线仿真功能
在线仿真器(In Circuit Emulator,简称ICE)是由一系列硬件构成的设备,它能仿真用户系统中的单片机,并能模拟用户系统的ROM、RAM和I/O口。因此,在线仿真状态下,用户系统的运行环境和脱机运行的环境完全“逼真”。
2.调试功能
1)运行控制功能
开发系统应能使用户有效地控制目标程序的运行,以便检查程序运行的结果,对存在的硬件故障和软件错误进行定位。
2)单片机状态查看修改功能
当CPU停止执行程序运行后,开发系统允许用户方便地读出或修改目标系统资源的状态,以便检查程序运行的结果、设置断点条件以及设置程序的初始参数。任务2中图2.13给出了在Medwin调试环境下查看单片机内部资源的菜单。
3.程序编译功能
1) 程序设计语言
单片机程序设计语言包括机器语言、汇编语言和高级语言。
机器语言是单片机唯一能够识别的语言。
汇编语言具有使用灵活、实时性好的特点。目前,在实际项目开发中较少使用汇编语言。
高级语言通用性好,且具有较好的可读性和可移植性,是目前单片机编程语言的主流。
2) 程序编译
单片机开发系统能够提供源程序的编辑、编译和下载功能以及工程管理功能。
4.程序固化功能
编程器是完成这种任务的专用设备,它也是单片机开发系统的重要组成部分。
习题3 答案
3.1 单项选择题
(1)A (2) A (3) C (4)C (5)A
(6)B (7)D (8)D (9)A (10)A
(11)B (12)C (13)D (14)D (15)C
3.2 填空题
(1)P3口
(2)字节,位
(3)主函数main()
(4)sbit FLAG=P3^1;
(5)sfr
(6)顺序结构、选择结构和循环结构
(7)表达式加上分号“;”
(8)if,switch
(9)do-while,while
(10)无限次
(11)10000
(12)unsigned char
(13)变量在MCS-51硬件系统中所使用的存储区域
(14)'\0'
(15)程序存储器ROM中
3.3 上机操作题
(1)
//xiti3_3_1.c——第三章习题3.3上机操作题(1)
#include
void delay(unsigned char i); //延时函数声明
void main() //主函数
{
while(1){
P1=0x55; //按状态1的方式点亮8个LED
delay(200); //延时
P1=0xaa; //按状态2的方式点亮8个LED
delay(200); //延时
}
}
void delay(unsigned char i) //延时函数参见任务1程序ex1_1.c
(2)
//xiti3_3_2.c——第三章习题3.3上机操作题(2)
#include
void delay(unsigned char i); //延时函数声明
void main() //主函数
{
unsigned char i,l,r;
while(1){
l=0x10; // 高4位灯的位置初值为00010000B
r=0x08; // 低4位灯的位置初值为00001000B
for(i=0;i<4;i++){
P1=~(l|r); // 循环点亮灯
l<<=1; // 高4位灯的位置移动
r>>=1; // 低4位灯的位置移动
delay(200); //延时
}
}
}
void delay(unsigned char i) //延时函数参见任务1程序ex1_1.c
(3)
//xiti3_3_3.c——第三章习题3.3上机操作题(3)
#include
void delay(unsigned char i); //延时函数声明
void main() //主函数
{
unsigned char i;
unsigned char display[]={0x89, 0xff,0x86, 0xff,0xc7, 0xff,0xc7, 0xff,0xc0, 0xff};
while(1){
for(i=0;i<10;i++){
P1=display[i]; //显示字送P1口
delay(200); //延时
}
}
}
void delay(unsigned char i) //延时函数参见任务1程序ex1_1.c
习题4 答案
4.1 单项选择题
(1)B (2)A (3)C (4)A (5)A
(6)B (7)A (8)A (9)D (10)A
(11)C (12)C (13)A (14)D
4.2 填空题
(1)①定时器T0 ②定时器T1 ③定时器方式寄存器TMOD ④定时器控制寄存器TCON
(2)GATE=0
(3)TMOD=0x05
(4)选择定时器T0/T1的工作方式
(5)控制定时器的启动、停止,标志定时器的溢出和中断情况。
(6)定时控制寄存器TCON 、串行口控制寄存器SCON 、中断允许寄存器IE 、中断优先权寄存器IP
(7)外部中断0、定时器0、外部中断1、定时器1、串行口 (8)电平触发方式
(9)硬件自动清除、软件清除、硬件配合软件共同清除 (10)0 4. 3 答:
当定时/计数器设置为定时工作方式时,计数器对内部机器周期计数,每过一个机器周期,计数器增1,直至计满溢出。定时器的定时时间与系统的振荡频率紧密相关,如果单片机系统采用12M 晶振,则计数周期为:s 112
/110121T 6μ=??=
,这是最短的定时周期,适
当选择定时器的初值可获取各种定时时间。
当定时/计数器设置为计数工作方式时,计数器对来自输入引脚T0(P3.4)和T1(P3.5)的外部信号计数,外部脉冲的下降沿将触发计数,检测一个由1到0的负跳变需要两个机器周期,所以,最高检测频率为振荡频率的1/24。计数器对外部输入信号的占空比没有特别的限制,但必须保证输入信号的高电平与低电平的持续时间在一个机器周期以上。
当需要准确计算时间时往往采用定时器的定时方式,而当要对一些外部事件计数时则采用定时器的计数方式。
4. 4 答:
软件定时是通过编写一段延时程序来实现定时,这段延时程序不完成任何操作,只是通过一些空操作浪费掉一段时间。这样的软件定时往往浪费CPU 的工作效率,并且定时不够准确,前面三章的各个任务中均采用了这种方法。
硬件定时是通过单片机的定时器来实现时间的计算,用户只需要对定时器的工作方式、初始值赋予合适的数值,启动定时器后,定时器将自动按照机器周期定时。这种由定时器实现的定时方式,定时时间准确、CPU 的工作效率高。
4.5 答:
MCS-51系列单片机的定时/计数器是增1计数器。
对于增1计数器,计数初值应等于最大计数值减去所需要的计数值。 而减1计数器,计数初值就等于所需要的计数值。
例如:假设需要计数50000次。对于增1计数器的单片机,若采用方式1的定时器,最大计数值为65536,则初值应为:65536-50000=15536。
而对于减1计数器,则计数初值将为50000。 4.6 答:
在定时/计数器工作于方式1下,最大计数值为65536。
若晶振频率为6MHz ,则一个机器周期为2μS,所以最短定时时间为2μS (计数初值为65535),最长定时时间为2μS ×65536=131072μS (计数初值为0)
4.7 答:
定时/计数器的4种工作方式由方式寄存器TMOD 中的M1、M0来进行选择,具体如下:
4.8
答:
中断是通过硬件来改变CPU的运行方向。计算机在执行程序的过程中,当出现CPU以外的某种情况,由服务对象向CPU发出中断请求信号,要求CPU暂时中断当前程序的执行而转去执行相应的处理程序,待处理程序执行完毕后,再继续执行原来被中断的程序。这种程序在执行过程中由于外界的原因而被中间打断的情况称为“中断”。
调用中断服务程序的过程类似于调用子程序,其区别在于调用子程序在程序中是事先安排好的;而何时调用中断服务程序事先却无法确定,因为“中断”的发生是由外部因素决定的,程序中无法事先安排调用指令,因此,调用中断服务程序的过程是由硬件自动完成的。
中断的特点:分时操作、实时处理、故障处理
4.9
答:
MCS-51系列单片机有5个中断源,分别是外部中断0、定时器0、外部中断1、定时器1、串行口。它们的优先级别通过寄存器IP实现。
4.10
答:
外部中断有低电平触发和下降沿触发两种方式。通过定时器控制寄存器TCON中的IT0、IT1来选择和设定。
IT1为1
INT中断触发方式控制位,当IT1 = 0,外部中断1控制为电平触发方式。当IT1 = 1,外部中断1控制为下降沿触发方式。
4.11
答:
常用的中断函数定义语法如下:
void 函数名()interrupt n
其中n为中断类型号,C51编译器允许0~31个中断,n取值范围0~31。
习题5答案
5.1 单项选择题
(1) C (2) A (3) C (4) B (5) B
(6) D (7) B (8) C (9) A
5.2
(1) led[k]
(2) delay()
5.3
答:
不能,因为共阴极和共阳极数码管com段接的电平不一样,点亮段码所需的电平也不同。应该将共阴极数码管的com端接至GND上,P1口和8个段之间接上非门。
5.4
答:
LED静态显示时各位数码管相对独立,公共端恒定接地(共阴极)或正电源(共阳极),每个数码管的8个字段分别与一个8位I/O口地址相连,适合于2个及其以下的数码管显示。动态显示时各位数码管的段选线相应并联在一起,由一个8位的I/O口控制,各位的段选线由另外的I/O口控制。
5.5
答:
每次只能点亮一行。其采用的为动态显示,具体原理为:从第一行开始点亮,每行点亮之间延时1ms,第八行结束后再从第一行开始循环显示。利用人体的视觉驻留现象,所以看到的是一个稳定的图形,好像8行同时点亮。
5.6
答:
可以采用硬件和软件两种方式,硬件上可在键输出端加RS触发器或单稳态触发器构成去抖电路,软件上可以在检测到有按键按下时,执行一个10ms左右的延时程序,然后确认该键是否仍保持闭合状态的电平。
5.7
答:
独立式按键是直接用I/O口线构成的单个按键电路,其特点是每个按键单独占用一根I/O 口线,适合于八键以下使用;矩阵式键盘由行线和列线组成,按键位于行、列线的交叉点上,在按键数量较多时,矩阵式键盘较之独立式按键键盘要节省很多I/O口,适合于八个键以上使用。
习题6答案
6.1 单项选择题
(1) D (2)C (3)A (4) A (5)B (6) D
6.2 填空题
(1)分辨率和建立时间
(2)ILE、CS、1
WR、XFER
WR、2
(3)模拟,数字;数字,模拟
6.3
答:
DAC0832与8051单片机接口时,主要有如下控制信号:ILE、/CS、/WR1、/WR2 、/XFER,作用分别是:
(1)CS:转入寄存器片选信号,低电平有效。
(2)ILE:输入寄存器的数据锁存允许信号,高电平有效。
(3)1
WR:输入寄存器的数据写信号,低电平有效。
(4)2
WR:DAC寄存器写信号,并启动转换。低电平有效。
(5)XFER:数据向DAC寄存器传送控制信号,传送后即启动转换,低电平有效。
ADC0809与8051单片机接口时,控制信号主要有:ALE、START、EOC、OE。作用分别是:(1)ALE:地址锁存允许信号在ALE上升沿,ADDA、ADDB、ADDC地址状态被送入地址锁存器中。
(2)START:转换启动信号。START上跳沿时,所有内部寄存器清0;START下跳沿
时,开始进行A/D转换;在A/D转换期间,START应保持低电平。
(3)OE:输出允许信号。用于控制三态输出锁存器向单片机输出转换得到的数据。OE=0,输出数据线呈高电阻;OE=1,输出转换得到的数据。
(4)EOC——转换结束状态信号。启动转换后,系统自动设置EOC=0,转换完成后,EOC=1。该状态信号既可作为查询的状态标志,又可以作为中断请求信号使用。
6.4
答:
所谓单缓冲方式就是使0832的两个输入寄存器中有一个处于直通方式,而另一个处于受控的锁存方式,或者两个输入寄存器同时受相同的信号控制的方式。在实际应用中,如果只有一路模拟量输出,或虽有几路模拟量但并不要求同步输出的情况,就可采用单缓冲方式。
所谓双缓冲方式,就是把DAC0832的两个锁存器都接成受控锁存方式。
6.5
答:
判断A/D转换是否结束一般可采用3种方式,即EOC信号和单片机相连可有3种方式:
①延时方式:EOC悬空,启动转换后,延时100μs后读入转换结果。
②查询方式:EOC接单片机端口线,查得EOC变高,读入转换结果,作为查询信号。
③中断方式:ROC经非门接单片机的中断请求端,转换结束作为中断请求信号向单片
机提出中断申请,在中断服务中读入转换结果。
其中延时方式和查询方式均占用单片机CPU,即在这段时间,CPU只能做延时或查询的工作,而采用中断方式时,CPU可先执行主程序,一旦产生中断,才去处理数据接收的工作,使得CPU利用率较前面两种要高。
6.6
答:
(1)周期为25ms的锯齿波发生器C语言源程序如下:
#include
#include
#define DA0832 XBYTE[0x7fff]
#define uchar unsigned char
#define uint unsigned int
uchar i;
void delay_100us()
{ TH1=0xff; // 置定时器初值0xff9c,即65436,定时0.1ms
TL1=0x9c;
TR1=1; // 启动定时器1
while(!TF1); // 查询计数是否溢出,即定时0.1ms时间到,TF1=1 TF1=0; // 0.1ms时间到,将定时器溢出标志位TF清零
}
void main(void)
{ TMOD=0x10; // 置定时器1为方式1
while(1)
{ for(i=0;i<=255;i++) //形成锯齿波输出值,最大255
{ DA0832=i; //D/A转换输出
delay_100us();
}
}
}
(2)周期为50ms的三角波C语言源程序如下:
#include
#include
#define DA0832 XBYTE[0x7fff]
#define uchar unsigned char
#define uint unsigned int
uchar i,j;
void delay_100us()
{ TH1=0xff; //置定时器初值0xff9c,即65436,定时0.1ms
TL1=0x9c;
TR1=1; // 启动定时器1
while(!TF1); // 查询计数是否溢出,即定时0.1ms时间到,TF1=1 TF1=0; // 0.1ms时间到,将定时器溢出标志位TF清零
}
void main(void)
{ TMOD=0x10; // 置定时器1为方式1
while(1)
{ for(i=0;i<=255;i++) //形成三角波输出值,最大255
{ DA0832=i; //D/A转换输出
delay_100us();
}
for(j=255;j>=0;j--)//形成三角波输出值,最大255
{ DA0832=j; //D/A转换输出
delay_100us();
}
}
}
(3)周期为50ms的方波C语言源程序如下:
#include
#include
#define DA0832 XBYTE[0x7fff]
#define uchar unsigned char
#define uint unsigned int
uchar i,j;
void delay_25ms()
{ TH1=0x9e; // 置定时器初值
TL1=0x58;
TR1=1; // 启动定时器1
while(!TF1); // 查询计数是否溢出,即定时25ms时间到,TF1=1 TF1=0; // 25ms时间到,将定时器溢出标志位TF清零
}
void main(void)
{ TMOD=0x10; // 置定时器1为方式1
while(1)
{ DA0832=255; //形成方波输出值,最大255 ,D/A转换输出
delay_25ms();
DA0832=0; //D/A转换输出
delay_25ms();
}
}
6.7
答:
在选定转换通道后,ADC0809工作的主要有以下几个步骤:
1.启动A/D转换,给START引脚一个下降沿;
2.ALE信号与START信号一般连接在一起,这样使得在ALE信号的前沿写入地址信号,紧接着在其后沿就启动转换;
3.查询EOC引脚状态,EOC引脚由0变1,表示A/D转换过程结束;
4.允许读数,将OE引脚设置为1状态。
5.读取A/D转换结果,从ADC0809的外部地址读取其转换结果。
习题7答案
7.1 单项选择题
(1) A (2)B (3)D (4) C (5)B
(6) C (7)B (8)C (9) C (10)A
(11) C (12)D (13)A
7.2
答:
在异步通信中,数据是不连续传送的,数据通常是以字符为单位组成字符帧传送的。字符帧由发送端一帧一帧地发送,每一帧数据是低位在前,高位在后,通过传输线被接收端一帧一帧地接收。发送端和接收端可以由各自独立的时钟来控制数据的发送和接收,这两个时钟彼此独立,互不同步。
异步通信的字符帧格式分为无空闲位帧格式和有空闲位帧格式。
7.3
答:
T1的溢出率取决于单片机定时器T1的计数速率和定时器的预置值。当定时器T1做波特率发生器使用时,通常是工作在模式2,即自动重装载的8位定时器,此时TL1作计数用,自动重装载的值在TH1内。设计数的预置值(初始值)为X,那么每过256-X个机器周期,定时器溢出一次。为了避免溢出而产生不必要的中断,此时应禁止T1中断。
7.4
答:
参考程序如下:
#include
#define uchar unsigned char
code uchar tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6D,0x7D,0x07,0x7f,0x6f}; uchar send[]={0x04,0x03,0x02,0x01,0x08,0x07,0x06,0x05};
int i,t;
//延时函数,当t取值12000时,若晶振fosc=12MHz,大约延时1s
void delay(t)
{for(i=0;i {;} } main() { unsigned char i,j,k,m; SCON=0x00; //串行口工作方式 while(1) { for(i=0;i<6;i++) {SBUF=(tab[send[i]]); // 发送第i个数据 while(TI==0); // 等待发送是否完成 TI=0; // TI清0 } delay(12000) ; for(m=6;m<12;m++) {SBUF=(tab[send[m]]); // 发送第i个数据 while(TI==0); // 等待发送是否完成 TI=0; // TI清0 } delay(12000) ; } } 7.5 答: 参考程序如下: 甲机发送 发送子程序参考如下: #include #include #include #include #include #define uchar unsigned char uchar FREQ; /*定时器计数变量*/ void main(void) { // 以下是设置中断和定时器 EA=1; PT0=1; ET0=1; TCON=0x08; TMOD=0x21; // 定时器0为产生10ms的中断,定时器1为9600bit/s 的波特率发生器TH0=-10000/256; TL0=-10000%256; TL1=0xfd; TH1=0xfd; SCON=0xd8; //串行口方式3发送 PCON=0x00; TR1=1; // 开定时器 TR0=1; TI=1; while(1){} } // 定时器0的中断服务程序,向串口发送“A”数据 void intsvr1(void) interrupt 1 { // 重新装入定时器0的初值; TH0=-10000/256; TL0=-10000%256; FREQ=FREQ+1; // 定时器T0的低四位赋值 if (FREQ==100) // 1秒判断 { FREQ=0; printf("A"); // 发送字符 } } 乙机接收子程序参考如下: #include #define uchar unsigned char void main(void) { uchar astring; //在11.059MHz晶振下,设置串行口波特率为9600bit/s,用串行口方式3接收TMOD=0x20; TH1=0xfd; TL1=0xfd; TR1=1; SCON=0xdb; PCON=0x00; while(1) { while(RI==0); RI=0; astring=SBUF; lcd_display(); //液晶显示参考前面章节程序 } } 7.6 答: 参考程序如下: #include #define INBUF_LEN 4 //数据长度 unsigned char inbuf1[INBUF_LEN]; unsigned char checksum,count3; bit read_flag= 0 ; //串行口初始化函数:init_serialcomm //函数功能:串行口初始化,设置波特率为4800bit/s,允许串口中断 //形式参数:无 //返回值:无 void init_serialcomm( void ) { SCON = 0x50 ; //SCON: 串行口方式1,允许接收 TMOD |= 0x20 ; //设置定时器1为方式2定时 PCON |= 0x80 ; //SMOD=1; TH1 = 0xf4 ; // 波特率4800bit/s, fosc=11.0592MHz TL1 = 0xf4 ; IE = 0x90 ; //开串口中断 TR1 = 1 ; // 启动定时器1 } //发送字符函数:send_char_com //函数功能:向串口发送一个字符 //形式参数:存放字符的变量ch, unsigned char类型 //返回值:无 void send_char_com( unsigned char ch) { SBUF=ch; while (TI== 0 ); TI= 0 ; } //发送字符串函数:send_string_com //函数功能:向串口发送一个字符串,strlen为该字符串长度 //形式参数:字符串变量*str, unsigned char 类型; 字符串长度strlen, unsigned int //类型 //返回值:无 void send_string_com( unsigned char *str, unsigned int strlen) { unsigned int k= 0 ; do { send_char_com(*(str + k)); k++; } while (k < strlen); } //串口接收中断函数 void serial () interrupt 4 using 3 { if (RI) { unsigned char ch; RI = 0 ; ch=SBUF; if (ch> 127 ) { count3= 0 ; inbuf1[count3]=ch; checksum= ch- 128 ; } else { count3++; inbuf1[count3]=ch; checksum ^= ch; if ( (count3==(INBUF_LEN- 1 )) && (!checksum) ) //最后一个字节是否为前几个字节 //后7位的异或校验和{ read_flag= 1 ; //如果串口接收的数据达到INBUF_LEN个,且校验没错, //就置位取数标志 } } } } void main() //主函数 { init_serialcomm();//初始化串口 while ( 1 ) { if (read_flag) //如果取数标志已置位,就将读到的数从串口发出 { read_flag= 0 ; //取数标志清0 send_string_com(inbuf1,INBUF_LEN); } } } 习题8 答案 8.1单项选择题,在A、B、C、D四个答案中只有一个正确答案。 (1)B (2)D (3)C (4)D (5)A (6)A (7) B 8.2填空题 (1)PSEN (2)双向数据线,P0口 (3)数据总线,地址总线 (4)74LS165,74LS164 (5)外接上拉电阻,由于AT24C01的SDA和SCL为开漏输出 (6)512 8.3 答: 因为MCS-51系列单片机分别对程序存储器和数据存储器访问提供了不同的控制信号,对程序存储器的读操作和取指操作由信号PSEN控制,而对数据存储器的读写操作由控制信号WR和RD控制,而且,对二者的操作指令也不相同,因此不会发生冲突。 8.4 答: 如果要在EPROM中定义表格,应在变量声明时使用code标志符,例如: unsigned char code tab[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8, 0x80,0x90}; //将0~9的共阳极数码管字符码表定义到程序存储器中。 在程序存储器中定义表格后,可以通过变量赋值实现从EPROM中读出所定义的表格数据。下面的程序段实现在程序存储器中查表、并将0~9显示字符码逐一送到P1口的操作: unsigned char i; for (i=0;i<=9;i++) { P1=tab[i]; //从程序存储器中取显示字符码送P1口 delay(); } 8.5 答: 参考程序如下: #include "reg51.h" unsigned char da[]={0xF9,0x80}; void delay (unsigned int i); //延时函数声明 main() { unsigned char i; P1=0xff; //P1.0置1,允许串行移位 SCON=0x00; //设串行口方式0 while(1){ for (i=0;i<2;i++) { SBUF=da[i]; //送显示 TI=0; while(!TI); //等待发送完毕 delay(2000); } } } void delay (unsigned int i) { 略 } 思考题与习题 3-1 传感器主要包括哪几部分试举例说明。 传感器一般由敏感元件、转换元件、基本转换电路三部分组成。 如气体压力传感器。其内部的膜盒就是敏感元件,它的外部与大气压力相通,内部感受被测压力p ,当p 发生变化时,引起膜盒上半部分移动,可变线圈是传感器的转换元件,它把输入的位移量转换成电感的变化。基本电路则是完成上述电感变化量接入基本转换电路,便可转换成电量输出。 3-2 请举例说明结构型传感器与物性型传感器的区别。 答:结构型传感器主要是通过传感器结构参量的变化实现信号变换的。例如,电容式传感器依靠极板间距离变化引起电容量的变化;电感式传感器依靠衔铁位移引起自感或互感的变化。 物性型传感器则是利用敏感元件材料本身物理性质的变化来实现信号变换。例如,水银温度计是利用水银的热胀冷缩性质;压电式传感器是利用石英晶体的压电效应等。 3-3 金属电阻应变片与半导体应变片在工作原理上有何区别 答:金属电阻应变片与半导体应变片的主要区别在于:金属电阻应变片是基于电阻应变效应工作的;半导体应变片则是基于压阻效应工作的。 3-4 有一电阻应变片(见图3-105),其灵敏度S 0=2,R =120Ω,设工作时其应变为1000με,问ΔR =设将此应变片接成图中所示的电路,试求:1)无应变时电流指示值;2)有应变时电流指示值;3)试分析这个变量能否从表中读出 解:由0dR R s ε = 得,0R R s ε?=??即,6012010001020.24R R s ε-?=??=???= ()1.5 12.5120 I mA = = 3-5 电容式传感器常用的测量电路有哪几种 答:变压器式交流电桥、直流极化电路、调频电路、运算放大电路。 3-6 一个电容测微仪其传感器的圆形极板半径r=4mm ,工作初始间隙δ=0.3mm ,求: 图3-105 题3-4图 《测试技术》(第二版)课后 习题答案-_ -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII 解: (1) 瞬变信号-指数衰减振荡信号,其频谱具有连续性和衰减性。 (2) 准周期信号,因为各简谐成分的频率比为无理数,其频谱仍具有离 散性。 (3) 周期信号,因为各简谐成分的频率比为有理数,其频谱具有离散 性、谐波性和收敛性。 解:x(t)=sin2t f 0π的有效值(均方根值): 2 /1)4sin 41(21)4sin 41(21)4cos 1(212sin 1)(1000 00 00 00 000 020 2 000=-= - = -== =? ? ? T f f T T t f f T T dt t f T dt t f T dt t x T x T T T T rms ππππππ 解:周期三角波的时域数学描述如下: (1)傅里叶级数的三角函数展开: ,式中由于x(t)是偶函数,t n 0sin ω是奇函数,则t n t x 0sin )(ω也是奇函数,而奇函数在上下限对称区间上的积分等于0。故 =n b 0。 因此,其三角函数展开式如下: 其频谱如下图所示: ? ????????+≤ ≤-≤≤- +=) (2 02022)(0000 0nT t x T t t T A A t T t T A A t x 2 1)21(2)(12/0002/2/00000= -==??-T T T dt t T T dt t x T a ??-==-2/000 02 /2/00 000cos )21(4cos )(2T T T n dt t n t T T dt t n t x T a ωω?????==== ,6,4,20 ,5,3,14 2sin 422222n n n n n π ππ?-=2 /2 /00 00sin )(2T T n dt t n t x T b ω∑∞ =+=102 2 cos 1 4 21)(n t n n t x ωπ ∑∞ =++=102 2)2sin(1 421n t n n πωπ (n =1, 3, 5, …) 1-3 求指数函数()(0,0)at x t Ae a t -=>≥的频谱。 (2)220 2 2 (2) ()()(2) 2(2)a j f t j f t at j f t e A A a j f X f x t e dt Ae e dt A a j f a j f a f -+∞ ∞ ---∞-∞-==== =-+++??πππππππ ()X f = Im ()2()arctan arctan Re ()X f f f X f a ==-π? 1-5 求被截断的余弦函数0cos ωt (见图1-26)的傅里叶变换。 0cos ()0 ωt t T x t t T ?≥的频谱密度函数为 1122 1()()j t at j t a j X f x t e dt e e dt a j a ∞ ∞ ----∞ -= == =++? ?ωωω ωω 根据频移特性和叠加性得: []001010222200222 000222222220000()()11()()()22()()[()]2[()][()][()][()] a j a j X X X j j a a a a j a a a a ??---+= --+=-??+-++?? --= -+-+++-++ωωωωωωωωωωωωωωωωωω ωωωωωωωω 0-1.什么是电力电子技术? 电力电子技术是应用于电力技术领域中的电子技术;它是以利用大功率电子器件对能量进行变换和控制为主要内容的技术。国际电气和电子工程师协会(IEEE)的电力电子学会对电力电子技术的定义为:“有效地使用电力半导体器件、应用电路和设计理论以及分析开发工具,实现对电能的高效能变换和控制的一门技术,它包括电压、电流、频率和波形等方面的变换。” 0-2.电力电子技术的基础与核心分别是什么? 电力电子器件是基础。电能变换技术是核心. 0-3.请列举电力电子技术的 3 个主要应用领域。 电源装置;电源电网净化设备;电机调速系统;电能传输和电力控制;清洁能源开发和新蓄能系统;照明及其它。 0-4.电能变换电路有哪几种形式?其常用基本控制方式有哪三种类型? AD-DC整流电;DC-AC逆变电路;AC-AC交流变换电路;DC-DC直流变换电路。 常用基本控制方式主要有三类:相控方式、频控方式、斩控方式。 0-5.从发展过程看,电力电子器件可分为哪几个阶段? 简述各阶段的主要标志。可分为:集成电晶闸管及其应用;自关断器件及其应用;功率集成电路和智能功率器件及其应用三个发展阶段。集成电晶闸管及其应用:大功率整流器。自关断器件及其应用:各类节能的全控型器件问世。功率集成电路和智能功率器件及其应用:功率集成电路(PIC),智能功率模块(IPM)器件发展。 0-6.传统电力电子技术与现代电力电子技术各自特征是什么? 传统电力电子技术的特征:电力电子器件以半控型晶闸管为主,变流电路一般 为相控型,控制技术多采用模拟控制方式。 现代电力电子技术特征:电力电子器件以全控型器件为主,变流电路采用脉宽 调制型,控制技术采用PWM数字控制技术。 0-7.电力电子技术的发展方向是什么? 新器件:器件性能优化,新型半导体材料。高频化与高效率。集成化与模块化。数字化。绿色化。 1-1.按可控性分类,电力电子器件分哪几类? 按可控性分类,电力电子器件分为不可控器件、半控器件和全控器件。 1-2.电力二极管有哪些类型?各类型电力二极管的反向恢复时间大约为多少? 电力二极管类型以及反向恢复时间如下: 1)普通二极管,反向恢复时间在5us以上。 2)快恢复二极管,反向恢复时间在5us以下。快恢复极管从性能上可分为快速恢复和超快速恢复二极管。前者反向恢复时间为数百纳秒或更长,后者在100ns 以下,甚至达到20~30ns,多用于高频整流和逆变电路中。 3)肖特基二极管,反向恢复时间为10~40ns。 1-3.在哪些情况下,晶闸管可以从断态转变为通态? 维持晶闸管导通的条件是什么? 1、正向的阳极电压; 2、正向的门极电流。两者缺一不可。阳极电流大于维持电流。 第三章:常用传感器技术 3-1 传感器主要包括哪几部分?试举例说明。 传感器一般由敏感元件、转换元件、基本转换电路三部分组成。 如图所示的气体压力传感器。其内部的膜盒就是敏感元件,它的外部与大气压力相通,内部感受被测压力p ,当p 发生变化时,引起膜盒上半部分移动,可变线圈是传感器的转换元件,它把输入的位移量转换成电感的变化。基本电路则是完成上述电感变化量接入基本转换电路,便可转换成电量输出。 3-2 请举例说明结构型传感器与物性型传感器的区别。 答:结构型传感器主要是通过传感器结构参量的变化实现信号变换的。例如,电容式传感器依靠极板间距离变化引起电容量的变化;电感式传感器依靠衔铁位移引起自感或互感的变化。 物性型传感器则是利用敏感元件材料本身物理性质的变化来实现信号变换。例如,水银温度计是利用水银的热胀冷缩性质;压电式传感器是利用石英晶体的压电效应等。 3-3 金属电阻应变片与半导体应变片在工作原理上有何区别? 答: (1)金属电阻应变片是基于金属导体的“电阻应变效应”, 即电阻材料在外力作用下发生机械变形时,其电阻值发生变化的现象,其电阻的相对变化为()12dR R με=+; (2)半导体应变片是基于半导体材料的“压阻效应”,即电阻材料受到载荷作用而产生应力时,其电阻率发生变化的现象,其电阻的相对变化为dR d E R ρλερ == 。 3-4 有一电阻应变片(见图3-105),其灵敏度S 0=2,R =120Ω,设工作时其应变为1000με,问ΔR =?设将此应变片接成图中所示的电路,试求:1)无应变时电流指示值;2)有应变时电流指示值;3)试分析这个变量能否从表中读出? 解:根据应变效应表达式R /R =S g 得 R =S g R =2100010-6120=0.24 1)I 1=1.5/R =1.5/120=0.0125A=12.5mA 2)I 2=1.5/(R +R )=1.5/(120+0.24)0.012475A=12.475mA 3)电流变化量太小,很难从电流表中读出。如果采用高灵敏度小量程的微安表,则量程不够,无法测量12.5mA 的电流;如果采用毫安表,无法分辨0.025mA 的电流变化。一般需要电桥图3-105 题3-4图 机械工程测试技术课后 习题答案 集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN] 第三章:常用传感器技术 3-1 传感器主要包括哪几部分?试举例说明。 传感器一般由敏感元件、转换元件、基本转换电路三部分组成。 如图所示的气体压力传感器。其内部的膜盒就是敏感元件,它的外部与大气压力相通,内部感受被测压力p ,当p 发生变化时,引起膜盒上半部分移动,可变线圈是传感器的转换元件,它把输入的位移量转换成电感的变化。基本电路则是完成上述电感变化量接入基本转换电路,便可转换成电量输出。 3-2 请举例说明结构型传感器与物性型传感器的区别。 答:结构型传感器主要是通过传感器结构参量的变化实现信号变换的。例如,电容式传感器依靠极板间距离变化引起电容量的变化;电感式传感器依靠衔铁位移引起自感或互感的变化。 物性型传感器则是利用敏感元件材料本身物理性质的变化来实现信号变换。例如,水银温度计是利用水银的热胀冷缩性质;压电式传感器是利用石英晶体的压电效应等。 3-3 金属电阻应变片与半导体应变片在工作原理上有何区别? 答: (1)金属电阻应变片是基于金属导体的“电阻应变效应”, 即电阻材料在外力作用下发生机械变形时,其电阻值发生变化的现象,其电阻的相对变化为()12dR R με=+; (2)半导体应变片是基于半导体材料的“压阻效应”,即电阻材料受到载荷作用而产生应力时,其电阻率发生变化的现象,其电阻的相对变化为dR d E R ρλερ == 。 3-4 有一电阻应变片(见图3-105),其灵敏度S 0=2,R =120Ω,设工作时其 应变为1000με,问ΔR =?设将此应变片接成图中所示的电路,试求:1)无应变时电流指示值;2)有应变时电流指示值;3)试分析这个变量能否从表中读出? 解:根据应变效应表达式R /R =S g 得 R =S g R =2100010-6120=0.24 1)I 1=1.5/R =1.5/120=0.0125A=12.5mA 2)I 2=1.5/(R +R )=1.5/(120+0.24)0.012475A=12.475mA 图3-105 题3-4图 第一章 2. 如图所示,设小面源的面积为?A s ,辐射亮度为L e ,面源法线与l 0 的夹角为θs ;被照面的面积为?A c ,到面源?A s 的距离为l 0。若θc 为辐射在被照面?A c 的入射角,试计算小面源在?A c 上产生的辐射照度。 解:亮度定义: r r e e A dI L θ?cos = 强度定义:Ω Φ =d d I e e 可得辐射通量:Ω?=Φd A L d s s e e θcos 在给定方向上立体角为: 2 cos l A d c c θ?= Ω 则在小面源在?A c 上辐射照度为:2 cos cos l A L dA d E c s s e e e θθ?=Φ= 3.假如有一个按朗伯余弦定律发射辐射的大扩展源(如红外装置面对 的天空背景),其各处的辐亮度L e 均相同,试计算该扩展源在面积为A d 的探测器表面上产生的辐照度。 答:由θcos dA d d L e ΩΦ = 得θcos dA d L d e Ω=Φ,且() 2 2cos r l A d d +=Ωθ 则辐照度:()e e e L d r l rdr l L E πθπ =+=? ?∞ 20 0222 2 7.黑体辐射曲线下的面积等于等于在相应温度下黑体的辐射出射度M 。试有普朗克的辐射公式导出M 与温度T 的四次方成正比,即 M=常数4T ?。这一关系式称斯特藩-波耳兹曼定律,其中常数为 5.6710-8W/m 2K 4 解答:教材P9,对公式2 1 5 1 ()1 e C T C M T e λλλ=-进行积分即可证明。 第二章 3.对于3m 晶体LiNbO3,试求外场分别加在x,y 和z 轴方向的感应主折射率及相应的相位延迟(这里只求外场加在x 方向上) 解:铌酸锂晶体是负单轴晶体,即n x =n y =n 0、n z =n e 。它所属的三方晶系3m 点群电光系数有四个,即γ22、γ13、γ33、γ51。电光系数矩阵为: L e ?A s ?A c l 0 θs θc 第1.2题图 练习题解答 [解] S 闭合时, S 断开时 下一题 返回练习题集 幻灯片2 1.3.2 求图示电路中开 关S 闭合和断开两种情况下a、b、c 三点的电位。 S 2 k? a b c +12 V 4 k? -6 V 4 k? 2 k? 1.3.1 求图示电路中开关S 闭合和断开两种情况下a、b、c 三点的电位。 R S 3 V 6 V a b c 下一题 上一题 返回练习题集 幻灯片3 1.5.1 试根据理想电压源和理想电流源的特点分析图示的两电路:当 R 变化时,对其余电路(虚线方框内的电路)的电压和电流有无影响?R 变化时所造成的影响是什么? [解] S 断开时, V V V 3 a 3 3 b 3 3 c 3 21012(126)V 9V (2442)10(24)1012(126)V 3V (2442)102106(126)V 3V (2442)10???=-?+=??+++??? ??+?=-?+=??+++??? ???=-+?+=-??+++???解:S 闭合时 V V V b 3 a 33 3 c 33 0V 410(12)V 8V 210410410(6)V 4V 210410=?=?=?+????=?-=-???+??? IS R 任 何 电 路 US + _ R 任 何 电 路 [解] 对电路(b ),因为凡与理想电流源串联的元件其电流均等于理想电流源的电流,故改变 R 不会影响虚线部分电路的电流,而虚线部分电路结构一定,故亦不会影响其电压。R 的变化仅影响其本身的电压及理想电流源的电压。 IS R 任 何 电 路 (b ) 现测课后习题答案 第1章 1. 直接的间接的 2. 测量对象测量方法测量设备 3. 直接测量间接测量组合测量直读测量法比较测量法时域测量频域测量数据域测量 4. 维持单位的统一,保证量值准确地传递基准量具标准量具工作用量具 5. 接触电阻引线电阻 6. 在对测量对象的性质、特点、测量条件(环境)认真分析、全面了解的前提下,根据对测量结果的准确度要求选择恰当的测量方法(方式)和测量设备,进而拟定出测量过程及测量步骤。 7. 米(m) 秒(s) 千克(kg) 安培(A) 8. 准备测量数据处理 9. 标准电池标准电阻标准电感标准电容 第2章 填空题 1. 系统随机粗大系统 2. 有界性单峰性对称性抵偿性 3. 置信区间置信概率 4. 最大引用0.6% 5. 0.5×10-1[100.1Ω,100.3Ω] 6. ± 7.9670×10-4±0.04% 7. 测量列的算术平均值 8. 测量装置的误差不影响测量结果,但测量装置必须有一定的稳定性和灵敏度 9. ±6Ω 10. [79.78V,79.88V] 计算题 2. 解: (1)该电阻的平均值计算如下: 1 28.504n i i x x n == =∑ 该电阻的标准差计算如下: ?0.033σ == (2)用拉依达准则有,测量值28.40属于粗大误差,剔除,重新计算有以下结果: 28.511?0.018x σ '='= 用格罗布斯准则,置信概率取0.99时有,n=15,a=0.01,查表得 0(,) 2.70g n a = 所以, 0?(,) 2.700.0330.09g n a σ =?= 可以看出测量值28.40为粗大误差,剔除,重新计算值如上所示。 (3) 剔除粗大误差后,生于测量值中不再含粗大误差,被测平均值的标准差为: ?0.0048σσ ''== (4) 当置信概率为0.99时,K=2.58,则 ()0.012m K V σ'?=±=± 由于测量有效位数影响,测量结果表示为 28.510.01x x m U U V =±?=± 4. 解: (1) (2) 最大绝对误差?Um=0.4,则最大相对误差=0.4%<0.5% 被校表的准确度等级为0.5 (3) Ux=75.4,测量值的绝对误差:?Ux=0.5%× 100=0.5mV 《电工电子技术》(第二版)节后学习检测解答 第1章节后检验题解析 第8页检验题解答: 1、电路通常由电源、负载和中间环节组成。电力系统的电路功能是实现电能的传输、分配和转换;电子技术的电路功能是实现电信号的产生、处理与传递。 2、实体电路元器件的电特性多元而复杂,电路元件是理想的,电特性单一、确切。由理想元件构成的、与实体电路相对应的电路称为电路模型。 3、电路中虽然已经定义了电量的实际方向,但对某些复杂些的直流电路和交流电路来说,某时刻电路中电量的真实方向并不能直接判断出,因此在求解电路列写方程式时,各电量前面的正、负号无法确定。只有引入了参考方向,方程式中各电量前面的的正、负取值才有意义。列写方程式时,参考方向下某电量前面取正号,即假定该电量的实际方向与参考方向一致,若参考方向下某电量前面取负号,则假定该电量的实际方向与参考方向相反;求解结果某电量为正值,说明该电量的实际方向与参考方向相同,求解结果某电量得负值,说明其实际方向与参考方向相反。电量的实际方向是按照传统规定的客观存在,参考方向则是为了求解电路方程而任意假设的。 4、原题修改为:在图1-5中,五个二端元 件分别代表电源或负载。其中的三个元件上电流和电压的参考方向已标出,在参考方向下通过测量得到:I 1=-2A ,I 2=6A ,I 3=4A ,U 1=80V ,U 2=-120V ,U 3=30V 。试判断哪些元 件是电源?哪些是负载? 解析:I 1与U 1为非关联参考方向,因此P 1=-I 1×U 1=-(-2)×80=160W ,元件1获得正功率,说明元件1是负载;I 2与U 2为关联参考方向,因此P 2=I 2×U 2=6×(-120)=-720W ,元件2获得负功率,说明元件2是电源;I 3与U 3为关联参考方向,因此P 3= I 3×U 3=4×30=120W ,元件3获得正功率,说明元件3是负载。 根据并联电路端电压相同可知,元件1和4及3和5的端电压之代数和应等于元件2两端电压,因此可得:U 4=40V ,左高右低;U 5=90V ,左低右高。则元件4上电压电流非关联,P 4=-40×(-2)=80W ,元件4是负载;元件5上电压电流关联,P 5=90×4=360W ,元件5是负载。 验证:P += P 1+P 3+ P 4+ P 5= 160+120+80+360=720W P -= P 2 =720W 电路中电源发出的功率等于负载上吸收的总功率,符合功率平衡。 第16页检验题解答: 图1-5检验题4电路图 U 3 西安理工研究生考试 传 感 器 与 智 能 检 测 技 术 课 后 习 题 1、对于实际的测量数据,应该如何选取判别准则去除粗大误差? 答:首先,粗大误差是指明显超出规定条件下的预期值的误差。去除粗大误差的准则主要有拉依达准则、格拉布准则、t检验准则三种方法。准则选取的判别主要看测量数据的多少。 对于拉依达准则,测量次数n尽可能多时,常选用此准则。当n过小时,会把正常值当成异常值,这是此准则的缺陷。 格拉布准则,观测次数在30—50时常选取此准则。 t检验准则,适用于观察次数较少的情况下。 2、系统误差有哪些类型?如何判别和修正? 答:系统误差是在相同的条件下,对同一物理量进行多次测量,如果误差按照一定规律出现的误革。 系统误差可分为:定值系统误差和变值系统误差。 变值系统误差乂可以分为:线性系统误差、周期性系统误差、复杂规律变化的系统误差。判定与修正: 对于系统误差的判定方法主要有: 1、对于定值系统误差一?般用实验对比检验法。改变产生系统误差的条件,在不同条件下进行测量,对结果进行比较找出恒定系统误差。 2、对于变值系统误差:a、观察法:通过观察测量数据的各个残差大小和符号的变化规律来判断有无变值系统误差。这些判断准则实质上是检验误差的分布是否偏离正态分布。 b、残差统计法:常用的有马利科夫准则(和检验),阿贝-赫梅特准则(序差检验法)等。 c、组间数据检验正态检验法 修正方法: 1.消除系统误差产生的根源 2.引入更正值法 3.采用特殊测量方法消除系统误差。主要的测量方法有:1)标准量替代法2)交换法3)对称测量法4)半周期偶数测量法 4.实时反馈修正 5.在测量结果中进行修正 3、从理论上讲随机误差是永远存在的,当测量次数越多时,测量值的算术平均值越接近真值。因此,我们在设计自动检测系统时,计算机可以尽可能大量采集数据,例如每次采样数万个数据计算其平均值,这样做的结果合理否? 答:这种做法不合理。随机误差的数字特征符合正态分布。当次数n增大时,测量精度相应提高。但测量次数达到一定数Id后,算术平均值的标准差下降很慢。对于提高精度基本可忽略影响了。因此要提高测量结果的精度,不能单靠无限的增加测量次数,而需要采用适当的测量方法、选择仪器的精度及确定适当的次数等几方面共同考虑来使测量结果尽可能的接近真值。 4、以热电阻温度传感器为例,分析传感器时间常数对动态误差的影响。并说明热电阻传感器的哪些参数对有影响? 答:1、对于热电阻温度传感器来说,传感器常数对于温度动态影响如式子t2=t x-T (dtJdt)所示,7■决定了动态误差的波动幅度。了的大小决定了随着时间变化 习题解答 【1-1】填空: 1.本征半导体是,其载流子是和。两种载流子的浓度。 2.在杂质半导体中,多数载流子的浓度主要取决于,而少数载流子的浓度则与有很大关系。 3.漂移电流是在作用下形成的。 4.二极管的最主要特征是,与此有关的两个主要参数是和。 5.稳压管是利用了二极管的特征,而制造的特殊二极管。它工作在。描述稳压管的主要参数有四种,它们分别是、、、和。 6.某稳压管具有正的电压温度系数,那么当温度升高时,稳压管的稳压值将。7.双极型晶体管可以分成和两种类型,它们工作时有和两种载流子参与导电。 8.场效应管从结构上分成和两种类型,它的导电过程仅仅取决于载流子的流动;因而它又称做器件。 9.场效应管属于控制型器件,而双极型晶体管是控制型器件。 10.当温度升高时,双极性晶体管的β将,反向饱和电流I CEO将,正向结压降U BE将。 11.用万用表判断电路中处于放大状态的某个晶体管的类型与三个电极时,测出最为方便。 12.晶体管工作有三个区域,在放大区时,应保证和;在饱和区,应保证和;在截止区,,应保证和。 13.当温度升高时,晶体管的共射输入特性曲线将,输出特性曲线将,而且输出特性曲线之间的间隔将。 解: 1.完全纯净的半导体,自由电子,空穴,相等。 2.杂质浓度,温度。 3.少数载流子,(内)电场力。 4.单向导电性,正向导通压降U F和反向饱和电流I S。 5.反向击穿特性曲线陡直,反向击穿区,稳定电压(U Z),工作电流(I Emin),最大管耗(P Zmax)和动态电阻(r Z) 6.增大; 7.NPN,PNP,自由电子,空穴(多子,少子)。 8.结型,绝缘栅型,多数,单极型。 9.电压,电流。 10.变大,变大,变小。 11.各管脚对地电压; 12.发射结正偏,集电结反偏;发射结正偏,集电结正偏;发射结反偏,集电结反偏。 13.左移,上移,增大.。 思考与习题 1-1 1-35图中,已知电流I =-5A ,R =10Ω。试求电压U ,并标出电压的实际方向。 图1-35 题1-1图 解:a)U=-RI=50V b)U=RI=-50V 。 1-2 在1-36图所示电路中,3个元件代表电源或负载。电压和电流的参考方向如图所示,通过实验测量得知:I 1=-4A ,I 2=4A ,I 3=4A ,U 1=140V ,U 2=-90V ,U 3=50V 。试求 (1)各电流的实际方向和各电压的实际极性。 (2)计算各元件的功率,判断哪些元件是电源?哪些元件是负载? (3)效验整个电路的功率是否平衡。 图1-36 题1-2图 解:(2)P 1=U 1I 1=-560W ,为电源;P 2=-U 2I 2=360W ,为负载;P 3=U 3I 3=200W,为负载。 (3)P发出=P吸收,功率平衡。 1-3 图1-37中,方框代表电源或负载。已知U =220V ,I = -1A ,试问哪些方框是电源,哪些是负载? 图1-37 题1-3图 a) b) I I a) b) c) d) 解:a)P=UI =-220W,为电源;b)P=-UI=220W,为负载; c)P=-UI=220W,为负载;d)P=UI =-220W,为电源。 1-4 图1-38所示电路中,已知A、B段产生功率1500W,其余三段消耗功率分别为1000W、350W、150W,若已知电流I=20A,方向如图所示。 (1)标出各段电路两端电压的极性。 (2)求出电压U AB、U CD、U EF、U GH的值。 (3)从(2)的计算结果中,你能看出整个电路中电压有什么规律性吗? 解:(2) U AB=-75V,U CD=50V,U EF=17.5V,U GH=7.5V (3) U AB+U CD+U EF+U GH=0. 1-5 有一220V、60W的电灯,接在220V的电源上,试求通过电灯的电流和电灯在220V 电压下工作时的电阻。如果每晚用3h,问一个月消耗电能多少? 解:I=P/U=0.27A,R= U 2/ P= 807Ω,W= P t=60×10-3 kW×30×3h =5.4度. 1-6 把额定电压110V、额定功率分别为100W和60W的两只灯泡,串联在端电压为220V的电源上使用,这种接法会有什么后果?它们实际消耗的功率各是多少?如果是两个110V、60W的灯泡,是否可以这样使用?为什么? 解:把额定电压110V、额定功率分别为100W和60W的两只灯泡,串联在端电压为220V的电源上使用,将会使60W的灯泡烧毁。60W的灯泡实际消耗的功率是93.8W,100W 的灯泡实际消耗的功率是56W。如果是两个110V、60W的灯泡,都在额定值下工作,可以这样使用。 1-7 有一直流电源,其额定功率为150W,额定电压50V,内阻1Ω,负载电阻可以调节。试求:(1)额定状态下的电流及额定负载。(2)开路状态下的电源端电压。(3)电源短路状态下的短路电流。 解:(1)I N=150/50=3A,R N=50/3-1=15.67Ω(2)U OC=50V (3) I S=50A 1.1简述测量仪器的组成与各组成部分的作用 答:感受件、中间件和效用件。感受件直接与被测对象发生联系,感知被测参数的变化,同时对外界发出相应的信号;中间件将传感器的输出信号经处理后传给效用件,放大、变换、运算;效用件的功能是将被测信号显示出来。 1.2测量仪器的主要性能指标及各项指标的含义是什么 答:精确度、恒定度、灵敏度、灵敏度阻滞、指示滞后时间等。精确度表示测量结果与真值一致的程度;恒定度为仪器多次重复测量时,指示值的稳定程度;灵敏度以仪器指针的线位移或角位移与引起这些位移的被测量的变化值之间的比例表示;灵敏度阻滞又称感量,是足以引起仪器指针从静止到做微小移动的被测量的变化值;指示滞后时间为从被测参数发生改变到仪器指示出该变化值所需时间,或称时滞。 2.3试述常用的一、二阶测量仪器的传递函数及它的实例 答:一阶测量仪器如热电偶;二阶测量仪器如测振仪。 2.4试述测量系统的动态响应的含义、研究方法及评价指标。 答:测量系统的动态响应是用来评价系统正确传递和显示输入信号的指标。研究方法是对系统输入简单的瞬变信号研究动态特性或输入不同频率的正弦信号研究频率响应。评价指标为时间常数τ(一阶)、稳定时间t s和最大过冲量A d(二阶)等。 2.6试说明二阶测量系统通常取阻尼比ξ=0.6~0.8范围的原因 答:二阶测量系统在ξ=0.6~0.8时可使系统具有较好的稳定性,而且此时提高系统的固有频率ωn会使响应速率变得更快。 3.1测量误差有哪几类?各类误差的主要特点是什么? 答:系统误差、随机误差和过失误差。系统误差是规律性的,影响程度由确定的因素引起的,在测量结果中可以被修正;随机误差是由许多未知的或微小因素综合影响的结果,出现与否和影响程度难以确定,无法在测量中加以控制和排除,但随着测量次数的增加,其算术平均值逐渐接近零;过失误差是一种显然与事实不符的误差。 3.2试述系统误差产生的原因及消除方法 答:仪器误差,安装误差,环境误差,方法误差,操作误差(人为误差),动态误差。消除方法:交换抵消法,替代消除法,预检法等。 3.3随机误差正态分布曲线有何特点? 答:单峰性、对称性、有限性、抵偿性。 4.1什么是电阻式传感器?它主要分成哪几种? 答:电阻式传感器将物理量的变化转换为敏感元件电阻值的变化,再经相应电路处理之后转换为电信号输出。分为金属应变式、半导体压阻式、电位计式、气敏式、湿敏式。 4.2用应变片进行测量时为什么要进行温度补偿?常用的温度补偿方法有哪几种? 答:在实际使用中,除了应变会导致应变片电阻变化之外,温度变化也会使应变片电阻发生误差,故需要采取温度补偿措施消除由于温度变化引起的误差。常用的温度补偿方法有桥路补偿和应变片自补偿两种。 4.4什么是电感式传感器?简述电感式传感器的工作原理 答:电感式传感器建立在电磁感应的基础上,是利用线圈自感或互感的变化,把被测物理量转换为线圈电感量变化的传感器。 4.5什么是电容式传感器?它的变换原理如何 答:电容式传感器是把物理量转换为电容量变化的传感器,对于电容器,改变ε ,d和A都会 r 影响到电容量C,电容式传感器根据这一定律变换信号。 4.8说明磁电传感器的基本工作原理,它有哪几种结构形式?在使用中各用于测量什么物理量? 第1章 测试技术基础知识 1.4 常用的测量结果的表达方式有哪3种?对某量进行了8次测量,测得值分别为:8 2.40、 82.43、82.50、82.48、82.45、82.38、82.42、82.46。试用3种表达方式表示其测量结果。 解:常用的测量结果的表达方式有基于极限误差的表达方式、基于t 分布的表达方式和基于 不确定度的表达方式等3种 1)基于极限误差的表达方式可以表示为 0max x x δ=± 均值为 8 1 18 i x x = =∑82.44 因为最大测量值为82.50,最小测量值为82.38,所以本次测量的最大误差为0.06。极限误差m ax δ取为最大误差的两倍,所以 082.4420.0682.440.12x =±?=± 2)基于t 分布的表达方式可以表示为 x t x x ∧ ±=σβ0 标准偏差为 s = =0.04 样本平均值x 的标准偏差的无偏估计值为 ?x σ ==0.014 自由度817ν=-=,置信概率0.95β=,查表得t 分布值 2.365t β=,所以 082.44 2.3650.01482.440.033x =±?=± 3)基于不确定度的表达方式可以表示为 0x x x x σ ∧ =±=± 所以 082.440.014x =± 解题思路:1)给出公式;2)分别计算公式里面的各分项的值;3)将值代入公式,算出结果。 第2章 信号的描述与分析 2.2 一个周期信号的傅立叶级数展开为 1 2ππ120ππ()4( cos sin )10 4 30 4 n n n n n y t t t ∞ ==+ + ∑ (t 的单位是秒) 求:1)基频0ω;2)信号的周期;3)信号的均值;4)将傅立叶级数表示成只含有正弦项的形式。 解:基波分量为 12ππ120ππ()|cos sin 10 430 4n y t t t == + 所以:1)基频0π(/)4 rad s ω= 2)信号的周期0 2π 8()T s ω= = 2-2 试用电压源与电流源等效变换的方法计算题图2-2中3Ω电阻中的电流I 。 题题2-2 解题图12(a) 解题图12(b) 解题图12(c) 解题图12(d) 解题图12(e) 解题图12(f) 解题图12(g) 解题图12(h) 解题图12(i)解题图12(j) 解:根据题目的要求,应用两种电源的等效变换法,将题图2-2所示电路按照解题图12所示的变换顺序,最后化简为解题图12(j)所示的电路,电流I 为 A 2.08 22 I =+= 注意: (1) 一般情况下,与理想电流源串联的电阻可视为短路、而与理想电压源并联的电阻可视为开路。故题图2-2所示电路最左边支路中的2Ω电阻可视为0; (2)在变换过程中,一定要保留待求电流I 的支路不被变换掉; (3)根据电路的结构,应按照a-b 、c-d 、e-f 的顺序化简,比较合理。 2-3 计算题图2-3中1Ω电阻上的电压U ab 。 V 题图2-3 V 解题图13(a) Ω解题图13(b) Ω 解题图13(c) Ω解题图13(d) Ω解题图13(e) 解:该题采用两种电源的等效变换法解题比较简便。按照解题图13的顺序化简,将题图2-3所示的电路最后化简为解题图13(e)所示的电路,根据电阻串联电路分压公式计算电压U ab 为 V 37.21 18.08 .2U ab =+= 2-5 应用支路电流法计算题图2-5所示电路中的各支路电流。 V 45题题2-5 V 45解题图15 解:首先对于题图2-5所示电路的三条支路电流分别确定参考方向,如解题图15所示。然后应用基尔霍夫电流定律和基尔霍夫电压定律定律列出下列三个方程: ?? ? ??+=++=+=++==-+3223231131321I 6I 5I 3I 6I 245I 6I 20I 10I 6I 10700I I I 解之,得 A 3I A 5I A 2I 321=== 2-6 应用支路电流法计算题图2-6所示电路中的各支路电流。 解:如题图2-6所示,电路中的四条支路均为并联,其中一条支路电流为已知,根据支路电流法可知,只需列出三个独立方程即可求解。为看图方便,将电路中4Ω电阻支路改画到解题图16所示的地方,应用基尔霍夫电流定律对结点a 列出一个电流方程,再应用基尔霍夫电压定律对电路左边回路和中间回路列出两个电压方程,即 ?? ? ??+=+==++-I 4I 4.0116I 4I 8.0120010I I I 2121 解之,得 A 13.28I A 75.8I A 38.9I 21=== 2-8 电路如题图2-8所示,试用结点电压法计算图中电阻R L 两端电压U ,并计算理想电流源的功率。 Ω 8L R A 解题图16 I 题题2-6 Ω Ω8L 习题8 8.2一等强度梁上、下表面贴有若干参数相同的应变片,如题图8.1 所示。 题图8.1 梁材料的泊松比为μ,在力P的作用下,梁的轴向应变为ε,用静态应变仪测量时,如何组桥方能实现下列读数? a)ε;b) (1+μ)ε;c) 4ε;d) 2(1+μ)ε;e) 0;f) 2ε 解: 本题有多种组桥方式,例如图所示。 8.2如题图8.2所示,在一受拉弯综合作用的构件上贴有四个电阻应变片。试分析各应变片感受的应变,将其值填写在应变表中。并分析如何组桥才能进行下述测试:(1) 只测弯矩,消除拉应力的影响;(2) 只测拉力,消除弯矩的影响。电桥输出各为多少? 题图8.2 解 组桥如图。 设构件上表面因弯矩产生的应变为ε,材料的泊松比为μ,供桥电压为u0,应变片的灵敏度系数为K。 各应变片感受的弯应变如题表8.1-1。 题表8.1-1 R1R2R3R4 -μεε-εμε 可得输出电压 )] 1(2[ 4 1 ] ( ) ( [ 4 1 με με με ε ε+ = - - + - - =K u K u u y 其输出应变值为) 1(2με + (1)组桥如题图。 2 3 设构件上表面因拉力产生的应变为ε,其余变量同(1)的设定。 各应变片感受的应变如 题表8.1-2。 可得输出电压 )] 1(2[4 1 ]()([4100μεμεε μεε+=--+--= K u K u u y 输出应变值为 )1(2με+ 8.4 用YD -15型动态应变仪测量钢柱的动应力,测量系统如题图10.3所示,若R 1=R 2=120Ω,圆柱轴向应变为220με,μ=0.3,应变仪外接负载为R fz =16Ω,试选择应变仪衰减档,并计算其输出电流大小。(YD -15型动态应变仪的参数参见题表8.3-1和8.3-2。) 解 电桥输出应变 286220)3.011仪=?+=+=()(εμεμε 由题表8.3-1选衰减档3。 测试技术 第一章 习 题(P29) 解: (1) 瞬变信号-指数衰减振荡信号,其频谱具有连续性和衰减性。 (2) 准周期信号,因为各简谐成分的频率比为无理数,其频谱仍具有离散 性。 (3) 周期信号,因为各简谐成分的频率比为无理数,其频谱具有离散性、 谐波性和收敛性。 解:x(t)=sin2t f 0π的有效值(均方根值): 2 /1)4sin 41(21)4sin 41(21)4cos 1(212sin 1)(1000 00 00 00 000 020 2 000=-= - = -== =? ? ? T f f T T t f f T T dt t f T dt t f T dt t x T x T T T T rms ππππππ 解:周期三角波的时域数学描述如下: (1)傅里叶级数的三角函数展开: ,式中由于x(t)是偶函数,t n 0sin ω是奇函数,则t n t x 0sin )(ω也是奇函数,而奇函数在上下限对称区间上的积分等于0。故=n b 0。 因此,其三角函数展开式如下: ? ????????+≤ ≤-≤≤- +=) (2 02022)(0000 0nT t x T t t T A A t T t T A A t x 21)21(2)(12/0002/2/00000= -==??-T T T dt t T T dt t x T a ??-==-2/000 02 /2/00 000cos )21(4cos )(2T T T n dt t n t T T dt t n t x T a ωω?????====ΛΛ,6,4,20 ,5,3,14 2sin 422222n n n n n π ππ?-=2 /2 /00 00sin )(2T T n dt t n t x T b ω∑∞ =+=102 2 cos 1 4 21)(n t n n t x ωπ ∑∞ =++=102 2)2sin(1 421n t n n πωπ (n =1, 3, 5, …) 第五章 作业题答案 5.7解:最小可探测功率为: W 1074.11103001038.11067.51011616115231222 1 5 min 2 1 ----?=??? ? ?????????==???? ???=ασf kT A P 5.8解:(1) 当T =300K 时 最小可探测功率为: W 1038.18.013001038.11067.51051616115231222 15 2 1 ----?=??? ? ??????????=??? ? ???=ασf kT A P NE 比探测率为:/W H cm 1062.110 38.1)1105()(*2 121 z 1011 22 1??=???=?=--NE P f A D 热传导为: W/K 1045.230010 67.58.0105445 312 2 3 ---?=??????==T A G ασ (2) 当T =280K 时 最小可探测功率为: W 1016.18.012801038.11067.5105161611 5231222 15 2 1 ----?=??? ? ??????????=??? ? ???=ασf kT A P NE 比探测率为:/W H cm 1093.110 16.1)1105()(*2 121 z 1011 22 1??=???=?=--NE P f A D 热传导为: W/K 1099.128010 67.58.0105445 312 2 3 ---?=??????==T A G ασ 5.9 热释电器件为什么不能工作在直流状态? 答:当红外辐射照射到已经极化的铁电体薄片上时,引起薄片温度升高,表面电机械工程测试技术课后习题答案
《测试技术》(第二版)课后习题答案-_
(完整版)测试技术课后题答案
电力电子技术课后题答案
机械工程测试技术课后习题答案
机械工程测试技术课后习题答案
光电子技术安毓英习题答案(完整版)
电工学少学时唐介主编 课后习题答案
现代测试技术课后答案
电工电子技术课后答案
传感器与智能检测技术课后习题答案.doc
电子技术课后习题详解
电工电子技术课本习题答案
测试技术课后题部分答案
测试技术部分课后习题参考答案
电工与电子技术课后习题答案
测试技术课后题答案8力
贾民平《测试技术》课后习题答案
光电技术课后答案第五章
相关主题
文本预览