基于自适应模糊控制的拖拉机自动导航系统
摘要:阐述了一种基于自适应模糊控制的拖拉机自动导航系统。由PLC、电控开关液压阀和比例方向液压阀组成自动转向控制系统,设计了PD转向控制算法;为提高拖拉机自动导航的精度和稳定性,提出了一种基于遗传算法的自适应模糊控制方法,采用遗传算法在线优化模糊控制规则以及输出比例因子,既保留了传统模糊控制的优点,又有效了改善了系统的控制品质;仿真和田间实验结果表明,该方法可以迅速消除跟踪误差,相应速度快,超调小,系统工作稳定,稳态跟踪误差不超过10cm。
关键词:拖拉机;模糊控制;遗传算法;自动导航;自适应控制
引言
为提高农用车辆自动导航的精度和稳定性,许多学者对其导航方法进行了研究。文献[1~11]分别对线性模糊控制方法、模糊控制方法、最优控制方法、神经网络控制方法以及纯追踪算法进行了研究。总体来说,目前对于自适应导航控制方法研究较少。
模糊控制具有不依赖精确的数学模型、鲁棒性好等特点。对于一个确定的模糊控制器,当被控对象受到参数摄动和外部干扰等不确定因素影响时,仍可以保证系统最终趋于稳定,但是会降低系统的控制品质,出现诸如振荡加剧、过渡时间过长等缺点。因此有必要研究自适应模糊控制方法,在控制过程中的不同阶段,对模糊控制器进行自动调整。拖拉机本身是一个具有大延迟、高度非线性以及时变性和不确定性的复杂系统,而且农田地况较差,轮胎和地面作用过程复杂,难以建立精确的数学模型,因此应避免运用车辆模型进行控制,但是也应该充分挖掘车辆模型所蕴含的车辆状态信息,以改善导航系统性能。
本文提出一种基于遗传算法的自适应模糊控制算法,以RTK-DGPS为导航传感器,构建拖拉机自动导航系统,并进行拖拉机田间自动导航实验。
1 拖拉机自动导航控制系统
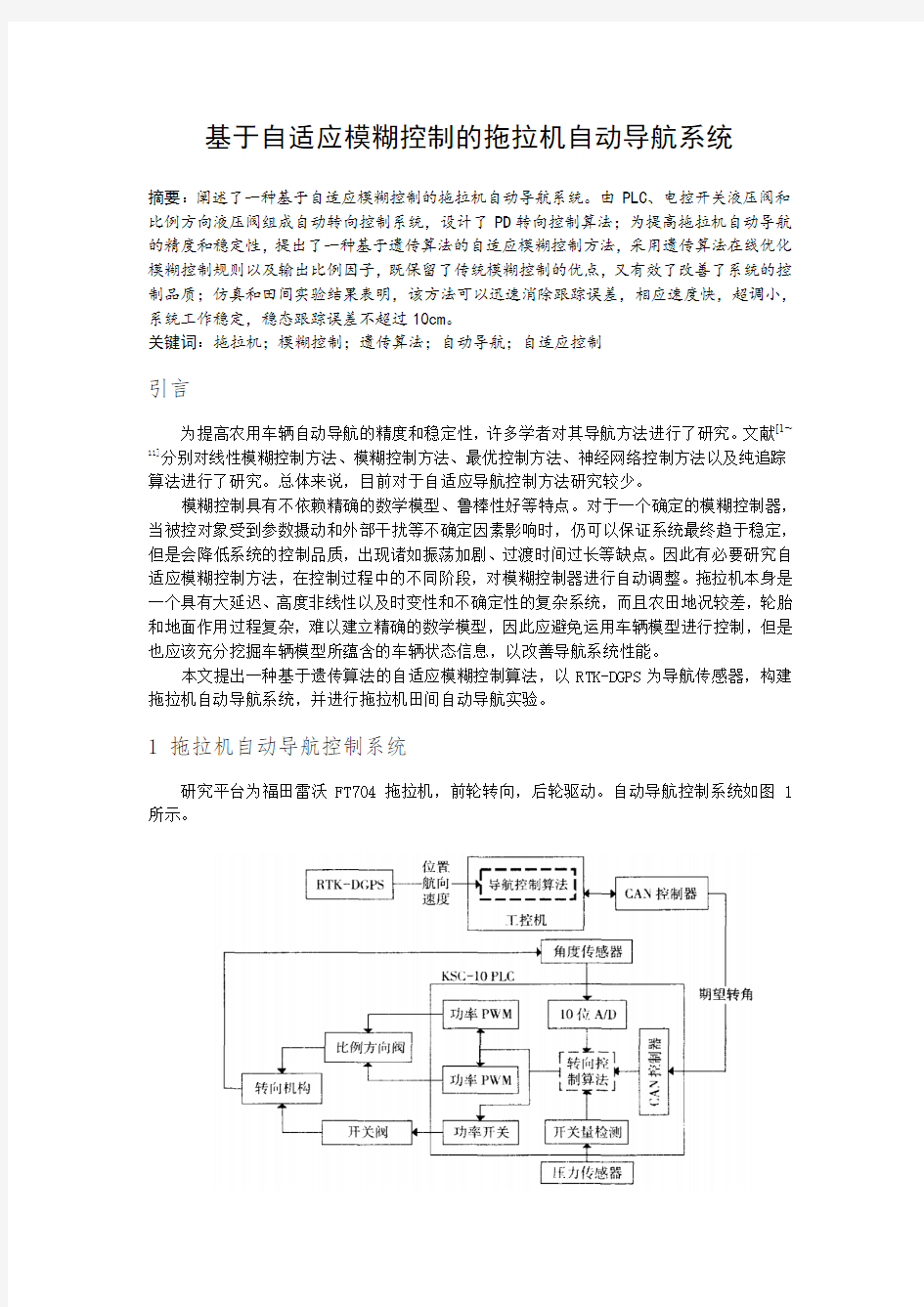
研究平台为福田雷沃FT704拖拉机,前轮转向,后轮驱动。自动导航控制系统如图1所示。
图1 导航控制系统
系统采用分层控制策略,两层之间通过CAN 总线(ISO11783协议标准)同信。PPC-3710GS 型工控机作为上层控制器,通过串口接受RTK-DGPS 输出的GGA 和VTG 两种数据格式(输出频率5Hz ),获取车辆的位置、航向和速度信息,经过导航控制算法输出期望前轮转角。KSC-10PLC 作为下层控制器,实时采集角度传感器数据,获取当前前轮转角,与期望转角相比较,通过转向控制算法,输出功率PWM 信号和功率开关信号,驱动开关阀和比例方向阀,实现前轮转向动作,并实时检测压力传感器的输出信号,实现自动驾驶模式和人工驾驶模式的自动切换。
2 基于遗传算法的自适应模糊导航控制器
采用拖拉机的横向偏差E 和航向偏差Ψ作为模糊控制器的输入,输出量为期望前轮转角U 。横向偏差E 基本论域选择为[-30cm,30cm],量化因子为Ke =0.5,航向偏差ψ基本论域选择为[-15°,15°],量化因子为K ψ=1,即两输入变量的模糊论域均为[-15,15],同时令输
出变量的模糊论域与输入相等。模糊控制器可以用解析式概括为[12]
U =-(αE +(1-α)ψ] (α∈(0,1)) (1)
其中,α为规则修正因子,又称为加权因子。通过调整α值,可以调整控制规则。这种基于解析式的模糊控制器可以将变量的基本论域划分得很细,不仅有利于提高控制精度,而且易于计算机实现,避免了常规模糊控制器规则繁琐的缺点。
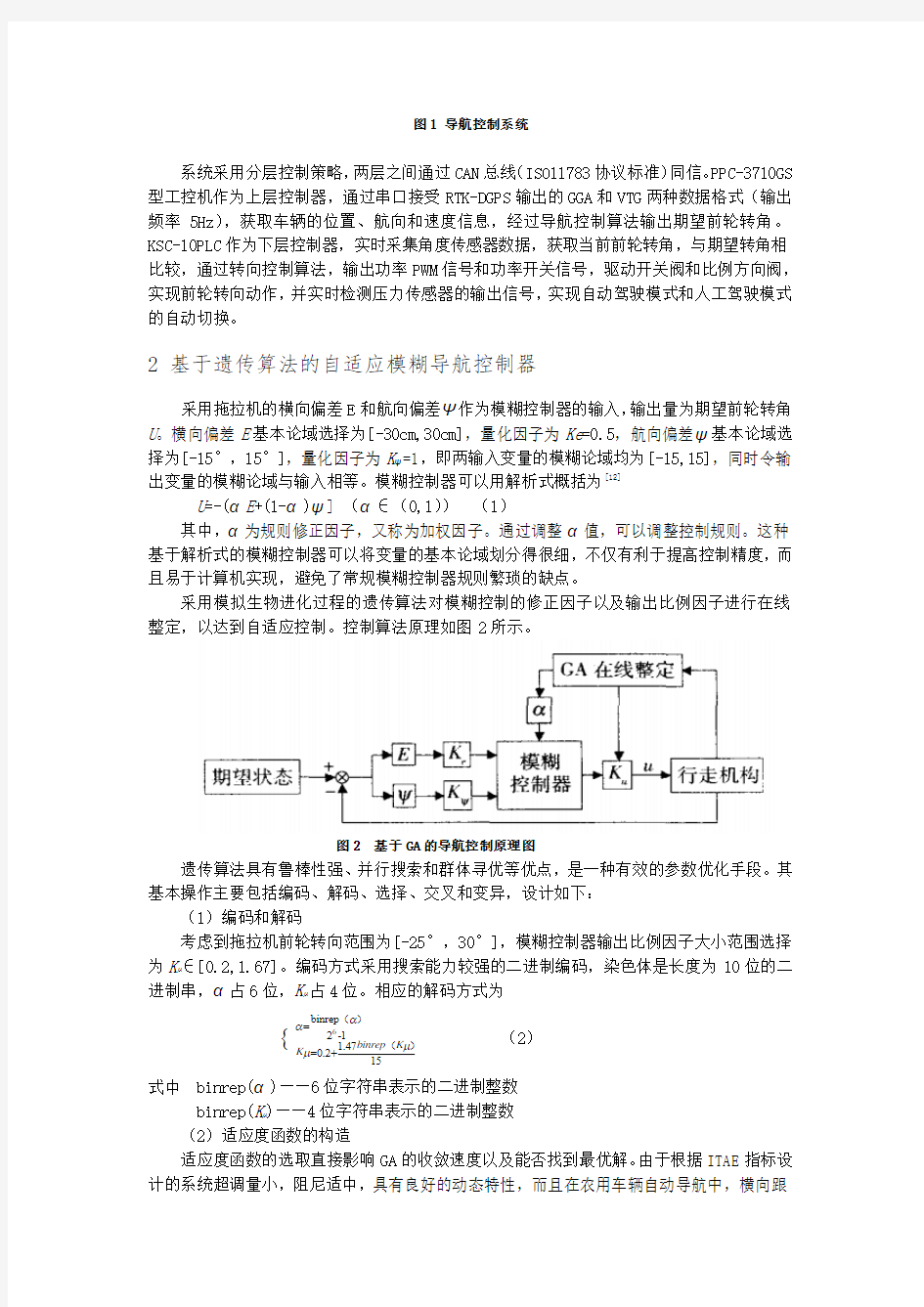
采用模拟生物进化过程的遗传算法对模糊控制的修正因子以及输出比例因子进行在线整定,以达到自适应控制。控制算法原理如图2所示。
图2 基于GA 的导航控制原理图
遗传算法具有鲁棒性强、并行搜索和群体寻优等优点,是一种有效的参数优化手段。其基本操作主要包括编码、解码、选择、交叉和变异,设计如下:
(1)编码和解码
考虑到拖拉机前轮转向范围为[-25°,30°],模糊控制器输出比例因子大小范围选择为K μ∈[0.2,1.67]。编码方式采用搜索能力较强的二进制编码,染色体是长度为10位的二进制串,α占6位,K μ占4位。相应的解码方式为 {
1
-2binrep 15
47.12.06)()(ααμμ=
+
=K binrep K (2) 式中 binrep(α)——6位字符串表示的二进制整数 binrep(K μ)——4位字符串表示的二进制整数 (2)适应度函数的构造
适应度函数的选取直接影响GA 的收敛速度以及能否找到最优解。由于根据ITAE 指标设计的系统超调量小,阻尼适中,具有良好的动态特性,而且在农用车辆自动导航中,横向跟
踪偏差是衡量控制效果的首要指标,故选择横向跟踪偏的ITAE 指标的倒数为适应度函数,即为
?
∞
=
|)(|1
dt
t y t f (3)
式中 y(t)——t 时刻的横向跟踪偏差,m
在实际寻优中,为提高算法运算速度,保证控制的实时性,改进为 )20(|
)(|11νround N k y t t f N
k k =?=
∑= (4)
式中 Δt ——分段积分区间长度,为0.1s
Y (k)——k Δt 时刻的横向跟踪偏差,m υ——拖拉机前进速度,m/s round ——对结果取整
为计算适应度函数,采用简化的两轮车运动学模型推算y(k),由于不考虑车辆离心力和侧滑,两轮车模型虽然在实际过程中不能完全精确描述车辆的运动状态,但是在很大程度
上还是能够反映车辆真实运动变化趋势的。同时将液压转向系统简化为一阶惯性环节[13]
,以预定直线路径为横轴建立跟踪坐标系,前进方向为横轴正方向,跟踪起点横坐标为零,则可得如图3所示的非线性运动学模型为
图3 两轮车运动学模型 θυcos =?
x
θυsin =?
y (5) L /tan αυθ=? ττααα
//d
+
-=?
式中 x ——跟踪距离,m v ——速度,m/s
y ——横向跟踪偏差,m L ——轴距,m
θ——航向跟踪偏差,rad α——前轮转向角,rad τ——惯性时间常数,s αd ——期望前轮转角,rad (3)选择策略
采用按适应度比例分配的轮盘赌选择法,即利用个体适应度比例的概率决定其后代留存的可能。若个体i 的适应度为fi ,则其被选中的概率为
∑=
f
f P i
i
i (6)
(4) 遗传算子
主要包括交叉和变异两个遗传算子。交叉算子采用单点交叉方式;变异算子,以变异概率对染色体的每个二进制位进行逻辑取反。遗传算法的流程如图4所示。
α、K μ参数编码
随机产生初始群体
解码并计算适应度 产生群体
满足终止条件? 选择、交叉、变异
输出α、K μ
图4 基于GA 的α、K μ参数优化流程
3 前轮转向控制器
由于KSC-10型PLC 支持多任务运行模式,所以将下层控制器的任务划分为:任务1,按照ISO11783规定的时间周期向导航控制器报告前轮转角;任务2,负责前轮转向控制以及驾驶模式的切换和上报。任务1的优先级高于任务2。
前轮自动转向控制是通过转向控制算法输出一定的功率型号,控制比例阀门的开度,通过调节流量来调节前轮的转向速度,从而实现转角的控制。本文采用位置式数字PD 控制器实现前轮转角控制,期望转角与当前转角之差作为控制器输入。转向控制原理如图5所示。
图5 转向控制结构 考虑到比例方向阀有两路PWM 输入,而且有700mA 的电流死区,控制算法改进为
)(1e e K K I
k k D p PD
e k
--+=
???
????=+
|
|700
700I I I P D P D
P D I
out
)
0(
)0≠=I PD I
PD
(
(7)
式中 I pd ——PD 算法输出值 K p ——比例系数
e k ——当前角度误差 K D ——微分系数
e k-1——前一次角度误差 I out ——控制器最终输出值
I out 的正负极性分别代表左路和右路PWM 输入,相应代表前轮的两个转动方向。在转向过程中的某一时刻,必然有一路PWM 输入需要置为0。
4 算法与系统实验
4.1 前轮转向控制实验
为尽可能考虑农田地面状况对前轮转向控制的影响,找了一块刚秋收后的玉米地进行转向控制实验。选择频率为0.2Hz ,幅值为15°方波指令曲线和正弦指令曲线对转向控制器进行测试。经过多次调试,当K p =250,K D =20时,转向控制效果较佳。测试结果如图6所示。
图 6 指令曲线跟踪
(a) 方波曲线跟踪 (b) 正弦曲线跟踪
可见,转向控制系统可以较好地完成信号跟踪任务。对于方波信号,跟踪一个30°的阶跃信号(从-15°到15°或反之)大约需要1.2~1.4s,对于正弦波,跟踪延迟约为0.2~0.4s,可满足实际自动导航需求。另外,在正负峰值处,跟踪曲线并不完全对称,这是由于左右转向时执行机构参数不同造成的。
4.2 导航控制算法仿真
首先在Matlab环境下,采用式(5)所描述的两轮车模型,对设计的自适应导航控制算法进行仿真验证,仿真程序采用M语言编写。运动学参数为:υ=2m/s,L=2.3m,τ=0.1s。遗传算法的种群大小为40,进化代数为40代,交叉概率为0.6,变异概率为0.02.拖拉机初始状态为[3.5m,0.4rad,0.2rad],分别代表横向偏差、航向偏差和前轮转向偏差,导航控制周期为200ms。与之对比,常规模糊控制的规则因子选择为0.6,输出比例因子为1。仿真结果如图7所示。
图7 直线跟踪仿真
由图可见,基于GA的自适应模糊控制与常规模糊控制相比,消除误差的速度更快,几乎没有超调和振荡,具有良好的动态性能,在理论上是可行的。
通过大量仿真发现,在GA每步进化中,基本不超过10代即可寻找到最优解,其中一步的进化过程如图8所示
图8 适应度曲线
另外,在拖拉机自动导航过程中,导航控制算法的实时性问题也是必须考虑的问题。将上述自适应控制方法在工控机的Visual C ++6.0环境下进行验证,进化代数设置为10代,经统计发现,美不优化平均耗时10ms左右,与200ms的导航控制周期相比,其算法延时造成的影响可以忽略不计。
4.3 田间自动导航试验
试验地点选择在一块秋收后的玉米地,地面颠簸不平。转向控制器采用上述设计的数字PD控制器,拖拉机速度为2m/s左右,分别对常规模糊控制方法和基于GA的自适应模糊控制方法进行试验,实验结果如图9所示。
(a)
(b)
图9 自动导航系统跟踪
(a)常规模糊控制(b)基于GA的自适应模糊控制
由图可见,基础常规模糊控制的直线跟踪,存在一定的超调和振荡,稳态时最大偏差为
20cm左右,而基于自适应模糊控制的直线跟踪可以迅速消除横向偏差,超调较小,振荡也较小,稳态时最大横向偏差为10cm左右,跟踪曲线变化相对平缓,具有良好的动态特性。考虑到地面颠簸不平对GPS天线造成一定定位误差情况下,这个跟踪精度是可以接受的。
5 结论
(1)对电控液压转向机构进行了研究,设计的位置数字PD转向控制器,具有良好的动态性能,可以满足农业机械自动导航的需求。
(2)对拖拉机自动导航控制算法进行了研究,设计的基于遗传算法的自适应模糊控制器,可以显著提高拖拉机自动导航时的跟踪精度,改善系统的控制品质。
参考文献
[1] Noguchi N,Will J,Reid J,et al. Development of a master-slave robot system for farm operations[J]. Computer
and Electronics in Agriculture,2004,44(1):1~19.
[2] Kaizu Y,Yokoyama S,Imou K,et al. Vision-based navigation of a rice transplanter [C]//2004 CIGR International
Confenrence,V ol.2,Beijing,2004:III 147.
[3]周建军,张漫.基于模糊控制的农用车辆路线跟踪[J].农业机械学报,2009,40(4):151~156.
[4]周俊,姬长英.视觉导航轮式移动机器人横向预测模糊控制[J].农业机械学报,2002,33(6):76~79.
[5]吕安涛,毛恩荣,宋正河,等.一种拖拉机自动驾驶复合模糊控制方法[J].农业机械学报,2006,37(4): 17~20.
[6]吕安涛,宋正河,毛恩荣.拖拉机自动转向最优控制方法的研究[J].农业工程学报,2006,22(8):116~ 119.
[7]朱忠祥,宋正河,谢斌,等.拖拉机队列自动控制系统[J].农业机械学报,2009,40(8):149~154.
[8]陈军,朱忠祥,鸟巢谅,等.拖拉机沿曲线路径的跟踪控制[J].农业工程学报,2006,22(11):108~111.
[9]周俊,姬长英,刘成良.农用轮式移动机器人视觉导航系统[J].农业机械学报,2005,36(3):90~94.
[10]陈军,朱忠祥,鸟巢谅,等.基于神经网络的农用车辆自动跟踪控制[J].农业机械学报,2007,38(5): 131~133.
[11]张智刚,罗锡文.基于Kalman滤波和纯追踪模型的农业机械导航控制[J].农业机械学报,2009,40(增
刊):6~12.
[12]李士勇.模糊控制、神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1998.
[13]吕安涛.基于GPS/IMU的拖拉机自动驾驶方法的研究[D].北京:中国农业大学,2006.
Matlab仿真代码
%fuzzy tunning PID control
clear all;
clear all;
a=newfis('fuzzpid');
a=addvar(a,'input','e',[-3,3]); %parameter e
a=addmf(a,'input',1,'NB','zmf',[-3,-1]);
a=addmf(a,'input',1,'NM','trimf',[-3,-2,0]);
a=addmf(a,'input',1,'NS','trimf',[-3,-1,1]);
a=addmf(a,'input',1,'Z','trimf',[-2,0,2]);
a=addmf(a,'input',1,'PS','trimf',[-1,1,3]);
a=addmf(a,'input',1,'PM','trimf',[0,2,3]);
a=addmf(a,'input',1,'PB','smf',[1,3]);
a=addvar(a,'input','ec',[-3,3]); %parameter ec
a=addmf(a,'input',2,'NB','zmf',[-3,-1]);
a=addmf(a,'input',2,'NM','trimf',[-3,-2,0]);
a=addmf(a,'input',2,'NS','trimf',[-3,-1,1]);
a=addmf(a,'input',2,'Z','trimf',[-2,0,2]);
a=addmf(a,'input',2,'PS','trimf',[-1,1,3]);
a=addmf(a,'input',2,'PM','trimf',[0,2,3]);
a=addmf(a,'input',2,'PB','smf',[1,3]);
a=addvar(a,'output','kp',[-0.3,0.3]); %parameter kp
a=addmf(a,'output',1,'NB','zmf',[-0.3,-0.1]);
a=addmf(a,'output',1,'NM','trimf',[-0.3,-0.2,0]);
a=addmf(a,'output',1,'NS','trimf',[-0.3,-0.1,0.1]);
a=addmf(a,'output',1,'Z','trimf',[-0.2,0,0.2]);
a=addmf(a,'output',1,'PS','trimf',[-0.1,0.1,0.3]);
a=addmf(a,'output',1,'PM','trimf',[0,0.2,0.3]);
a=addmf(a,'output',1,'PB','smf',[0.1,0.3]);
a=addvar(a,'output','ki',[-0.06,0.06]); %parameter ki a=addmf(a,'output',2,'NB','zmf',[-0.06,-0.02]);
a=addmf(a,'output',2,'NM','trimf',[-0.06,-0.04,0]);
a=addmf(a,'output',2,'NS','trimf',[-0.06,-0.02,0.02]); a=addmf(a,'output',2,'Z','trimf',[-0.04,0,0.04]);
a=addmf(a,'output',2,'PS','trimf',[-0.02,0.02,0.06]);
a=addmf(a,'output',2,'PM','trimf',[0,0.04,0.06]);
a=addmf(a,'output',2,'PB','smf',[0.02,0.06]);
a=addvar(a,'output','kd',[-3,3]); %parameter kd a=addmf(a,'output',3,'NB','zmf',[-3,-1]);
a=addmf(a,'output',3,'NM','trimf',[-3,-2,0]);
a=addmf(a,'output',3,'NS','trimf',[-3,-1,1]);
a=addmf(a,'output',3,'Z','trimf',[-2,0,2]);
a=addmf(a,'output',3,'PS','trimf',[-1,1,3]);
a=addmf(a,'output',3,'PM','trimf',[0,2,3]);
a=addmf(a,'output',3,'PB','smf',[1,3]);
rulelist=[1 1 7 1 5 1 1;
1 2 7 1 3 1 1;
1 3 6
2 1 1 1;
1 4 6
2 1 1 1;
1 5 5 3 1 1 1;
1 6 4 4
2 1 1;
1 7 4 4 5 1 1;
2 1 7 1 5 1 1;
2 2 7 1
3 1 1;
2 3 6 2 1 1 1;
2 4 5
3 2 1 1;
2 5 5
3 2 1 1;
2 6 4 4
3 1 1;
2 7
3
4 4 1 1;
3 1 6 1
4 1 1;
3 2 6 2 3 1 1;
3 3 6 3 2 1 1;
3 4 5 3 2 1 1;
3 5
4 4 3 1 1;
3 6 3 5 3 1 1;
3 7 3 5
4 1 1;
4 1 6 2 4 1 1;
4 2 6 2 3 1 1;
4 3
5 3 3 1 1;
4 4 4 4 3 1 1;
4 5 3 5 3 1 1;
4 6 2 6 3 1 1;
4 7 2 6 4 1 1;
5 1 5 2 4 1 1;
5 2 5 3 4 1 1;
5 3 4 4 4 1 1;
5 4 3 5 4 1 1;
5 5 3 5 4 1 1;
5 6 2 6 4 1 1;
5 7 2 7 4 1 1;
6 1 5 4
7 1 1;
6 2 4 4 5 1 1;
6 3 3 5 5 1 1;
6 4 2 5 5 1 1;
6 5 2 6 5 1 1;
6 6 2
7 5 1 1;
6 7 1 7 7 1 1;
7 1 4 4 7 1 1;
7 2 4 4 6 1 1;
7 3 2 5 6 1 1;
7 4 2 6 6 1 1;
7 5 2 6 5 1 1;
7 6 1 7 5 1 1;
7 7 1 7 7 1 1];
a=addrule(a,rulelist);
a=setfis(a,'DefuzzMethod','mom');
writefis(a,'fuzzpid');
a=readfis('fuzzpid');
%PID controller
ts=0.001;
sys=tf(5.235e005,[1,87.35,1.047e004,0]); dsys=c2d(sys,ts,'tustin');
[num,den]=tfdata(dsys,'v');
u_1=0.0;u_2=0.0;u_3=0.0;
y_1=0;y_2=0;y_3=0;
x=[0,0,0]';
error_1=0;
e_1=0.0;
ec_1=0.0;
kp0=0.40;
kd0=1.0;
ki0=0.0;
for k=1:1:500
time(k)=k*ts;
rin(k)=1;
%using fuzzy inference to tunning PID
k_pid=evalfis([e_1,ec_1],a);
kp(k)=kp0+k_pid(1);
ki(k)=ki0+k_pid(2);
kd(k)=kd0+k_pid(3);
u(k)=kp(k)*x(1)+kd(k)*x(2)+ki(k)*x(3);
if k==300 %adding disturbance(1.0v at time 0.3s)
u(k)=u(k)+1.0;
end
if u(k)>=10
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
yout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(1)*u(k)+num(2)*u_1+num( 3)*u_2+num(4)*u_3;
error(k)=rin(k)-yout(k);
%%%%%%%%%%%%%%%%%%%%%%%%%return of pid parameters%%%%%%%%%%%%%%%%%%%%%%%%
u_3=u_2;
u_2=u_1;
u_1=u(k);
y_3=y_2;
y_2=y_1;
y_1=yout(k);
x(1)=error(k); %calculating P
x(2)=error(k)-error_1; %calculating D
x(3)=x(3)+error(k); %calculating D
e_1=x(1);
ec_1=x(2);
error_2=error_1;
error_1=error(k);
end
showrule(a)
figure(1);plot(time,rin,'b',time,yout,'r'); xlabel('time(s)');ylabel( 'rin,yout');
figure(2);plot(time,error,'r');
xlabel('time(s)');ylabel( 'error ');
figure(3);plot(time,u,'r');
xlabel('time(s)');ylabel( 'u ');
figure(4);plot(time,kp,'r');
xlabel('time(s)');ylabel( 'kp ');
figure(5);plot(time,ki,'r');
xlabel('time(s)');ylabel( 'ki ');
figure(6);plot(time,kd,'r');
xlabel('time(s)');ylabel( 'kd ');
figure(7);plotmf(a,'input',1);
figure(8);plotmf(a,'input',2);
figure(9);plotmf(a,'output',1);
figure(10);plotmf(a,'output',2);
figure(11);plotmf(a,'output',3);
plotfis(a);
fuzzy fuzzpid.fis
第二部分 技术科目考试内容与评定标准 一、场地驾驶技能考试 (一)方向盘式拖拉机场地驾驶考试 1、图形: 2、图例: ○桩位,—边线,→前进线,┄┄→倒车线。 3、尺寸: (1)起点:距甲库外边线1.5倍机长; (2)路宽:机长的1.5倍;
(3)库长:机长的2倍; (4)库宽:大中型拖拉机为机宽加60厘米,小型拖拉机为机宽加50厘米。 4、操作要求: 采用单机进行,从起点倒车入乙库停正,然后两进两退移位到甲库停正,前进穿过乙库至路上,倒入甲库停正,前进返回起点。 5、考试内容 (1)在规定场地内,按照规定的行驶路线和操作要求完成驾驶拖拉机的情况; (2)对拖拉机前、后、左、右空间位置的判断能力; (3)对拖拉机基本驾驶技能的掌握情况。 6、合格标准 未出现下列情形的,考试合格: (1)不按规定路线、顺序行驶; (2)碰擦桩杆; (3)机身出线; (4)移库不入; (5)在不准停机的行驶过程中停机两次以上; (6)发动机熄火; (7)原地打方向; (8)使用半联动离合器或者单边制动器; (9)违反考场纪律。
(二)手扶式拖拉机场地驾驶考试 1、图形: 2、图例: ○桩位,—边线,→前进线,—→倒车线。 3、尺寸: (1)桩间距:机长加40厘米; (2)桩与边线间距:机宽加30厘米。 4、操作要求: 手扶式拖拉机考试应挂接挂车进行。按考试图规定的路线行驶,从起点按虚线绕桩倒车行驶,再按实线绕桩前进驶出。 5、考试内容 (1)在规定场地内,按照规定的行驶路线和操作要求完成驾驶拖拉机的情况; (2)对拖拉机前、后、左、右空间位置的判断能力; (3)对拖拉机基本驾驶技能的掌握情况。 6、合格标准
ICS 65.060.10 CCS T 69 拖拉机自动辅助驾驶显控系统技术规范 Technical specifications for tractor automatic assistant steering display and control systems (征求意见稿) 中关村空间信息产业技术联盟发布
T/ZKJXX XXXX—2020 目次 前言...................................................................................................................................................................... I I 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 3.1自动辅助驾驶显控系统 (1) 3.2农具重叠 (1) 3.3农具跳过 (1) 3.4作业管理 (2) 3.5光靶 (2) 3.6引导线 (2) 4 略缩语 (2) 5 拖拉机自动辅助驾驶显控系统组成 (2) 6 显控系统要求 (2) 6.1 显控单元技术要求 (2) 6.2 控制执行单元技术要求 (3) 6.3 显控系统接口 (3) 6.4 外观要求 (3) 6.5 电气要求 (3) 6.6 环境适应性要求 (4) 6.7 功能要求 (4) 6.8 性能要求 (5) 7 试验方法 (5) 7.1 试验条件 (5) 7.2 性能试验 (5) 7.3 环境试验 (5) 8 检验方法 (5) 8.1 检验条件 (6) 8.2 显控系统性能检验 (6) 8.3 显控系统环境检验 (6) 9 标志、包装、运输和贮存 (6) 9.1 标志 (6) 9.2 包装 (7) 9.3 贮存和运输 (7) I
物理与电子工程学院 《人工智能》 课程设计报告 课题名称关于模糊控制理论的综述 专业自动化 班级 11级3班 学生姓名郑艳伟 学号 指导教师崔明月 成绩 2014年6月18日
关于模糊控制理论的综述 摘要:模糊控制方法是智能控制的重要组成部分,本文简要回顾了模糊控 制理论的发展,详细介绍了模糊控制理论的原理和模糊控制器的设计步骤, 分析了模糊控制理论的优缺点以及模糊控制需要完善或继续研究的内容,根 据各种模糊控制器的不同特点,对模糊控制在电力系统中的应用进行了分 类,并分析了各类模糊控制器的应用效能.最后,展望了模糊控制的发展趋 势与动态. 关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展模糊控制是以模糊集理论、模糊语言变量和模糊控制逻辑推理为基础的一种智能控制方法,从行为上模拟人的思维方式,对难建模的对象实施模糊推理和决策的一种控制方法.模糊控制作为智能领域中最具有实际意义的一种控制方法,已经在工业控制领域、电力系统、家用电器自动化等领域中解决了很多的问题,引起了越来越多的工程技术人员的兴趣. 模糊控制系统简介 模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术.1965年美国的扎德[1]创立了模糊集合论, 1973 年, 他给出了模糊逻辑控制的定义和相关的定理.1974 年英国的Mamdani 首先用模糊控制语句组成模糊控制器,并把它用于锅炉和蒸汽机的控制, 在实验室获得成功, 这一开拓性的工作标志着模糊控制论的诞生. 模糊控制系统主要是模拟人的思维、推理和判断的一种控制方法, 它将人的经验、常识等用自然语言的形式表达出来, 建立一种适用于计算机处理的输入输出过程模型, 是智能控制的一个重要研究领域.从信息技术的观点来看, 模糊控制是一种基于规则的专家系统.从控制系统技术的观点来看, 模糊控制是一种普遍的非线性特征域控制器. 相对传统控制, 包括经典控制理论与现代控制理论.模糊控制能避开对象的数学模型(如状态方程或传递函数等) , 它力图对人们关于某个控制问题的成功与失败和经验进行加工, 总结出知识, 从中提炼出控制规则, 用一系列多维模糊条件语句构造系统的模糊语言变量模型, 应用CRI 等各类模糊推理方法,
神经网络自适应控制 学院:电气工程与自动化学院 专业:控制科学与工程 姓名:兰利亚 学号: 1430041009 日期: 2015年6月25日
神经网络间接自适应控制 摘要:自适应模糊控制系统对参数变化和环境变化不敏感,能用于非线性和多变 量复杂对象,不仅收敛速度快,鲁棒性好,而且可以在运行中不断修正自己的控制 规则来改善控制性能,因而受到广泛重视。间接自适应控制是通过在线辨识的到 控制对象的模型。神经网络作为自适应控制器,具有逼近任意函数的能力。 关键词:神经网络间接自适应控制系统辨识 一、引言 自适应控制系统必须完成测量性能函数、辨识对象的动态模型、决定控制 器如何修改以及如何改变控制器的可调参数等功能。自适应控制有两种形式: 一种是直接自适应控制,另一种是间接自适应控制。直接自适应控制是根据实 际系统性能与理想性能之间的偏差,通过一定的方法来直接调整控制器的参 数。 二、间接自适应系统分析与建模 2.1系统的分析 系统过程动态方程:y(k+1)= -0.8y(k)/(1+y2(k))+u(k),参考系统模型 由三阶差分方程描述: ym(k+1)=0.8ym(k)+1.2ym(k-1)+0.2ym(k-2)+r(k) 式中,r(k)是一个有界的参考输入。如果输出误差ec(k)定义为 ec(k)=y(k)-ym(k),则控制的目的就是确定一个有界的控制输入u(k),当k趋于 正无穷时,ec(k)=0.那么在k阶段,u(k)可以从y(k)和它的过去值中计算得 到: u(k)=0.8y(k)/(1+y2(k))+0.8y(k)+1.2y(k-1)+0.2y(k-2)+r(k) (1) 于是所造成的误差方程为: ec(k+1)=0.8ec(k)+1.2ec(k-1)+0.2ec(k-2) (2) 因为参考模型是渐进稳定的,所以对任意的初始条件,它服从当k趋于无穷, ec(k)=0。在任何时刻k,用神经元网络N2计算过程的输入控制,即 u(k)=-N[y(k)]+0.8y(k)+1.2y(k-1)+0.2y(k-2)+r(k) (3) 由此产生非线性差分方程:y(k+1)=-0.8y(k)/(1+y2(k))+N[y(k)] +0.8y(k)+ 1.2y(k-1)+0.2y(k-2)+r(k) (4) 故设计的要点是设计一个神经网络来逼近0.8y(k)/(1+y2(k))。 2.2系统的建模设计过程 第一步,用BP神经网络逼近,神经网络的结构包含三层:输入层、隐含层 和输出层。BP网络的训练过程如下:正向传播是输入信号从输入层经隐层传向 输出层,若输出层得到了期望的输出,则学习算法结束;否则,转至反向传 播。 第二步,输入测试样本,对神经网络的逼近程度进行测试,将测试后的期
模糊控制算法的研究 0842812128夏中宇 模糊控制概述 “模糊”是人类感知万物,获取知识,思维推理,决策实施的重要特征。“模糊”比“清晰”所拥有的信息容量更大,内涵更丰富,更符合客观世界。 在日常生活中,人们的思维中有许多模糊的概念,如大、小、冷、热等,都没有明确的内涵和外延,只能用模糊集合来描述。人们常用的经验规则都是用模糊条件语句表达,例如,当我们拧开水阀往水桶里注水时,有这样的经验:桶里没水或水较少时,应开大水阀;桶里水较多时,应将水阀关小些;当水桶里水快满时,则应把阀门关得很小;而水桶里水满时应迅速关掉水阀。其中,“较少”、“较多”、“小一些”、“很小”等,这些表示水位和控制阀门动作的概念都具有模糊性。即有经验的操作人员的控制规则具有相当的模糊性。模糊控制就是利用计算机模拟人的思维方式,按照人的操作规则进行控制,实现人的控制经验。 模糊控制理论是由美国著名的学者加利福尼亚大学教授Zadeh·L·A于1965年首先提出,它以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策略。 1974年,英国伦敦大学教授Mamdani·E·H研制成功第一个模糊控制器,充分展示了模糊技术的应用前景。 模糊控制概况 模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。1965年,美国的L.A.Zadeh 创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。1974年,英国的E.H.Mamdani首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。这一开拓性的工作标志着模糊控制论的诞生。 模糊控制实质上是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用。近20多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而又硕果累累的分支。其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。 模糊控制的基本理论 所谓模糊控制,就是在控制方法上应用模糊集理论、模糊语言变量及模糊逻辑推理的知识来模拟人的模糊思维方法,用计算机实现与操作者相同的控制。该理论以模糊集合、模糊语言变量和模糊逻辑为基础,用比较简单的数学形式直接将人的判断、思维过程表达出来,从而逐渐得到了广泛应用。应用领域包括图像识别、自动机理论、语言研究、控制论以及信号处理等方面。在自动控制领域,以模糊集理论为基础发展起来的模糊控制为将人的控制经验及推理过程纳入自动控制提供了一条便捷途径。 1.知识库
拖拉机驾驶员理论知识考试卷及答案 拖拉机驾驶员理论知识考试卷及答案姓名: __________准考证号:___________考核日期:___年___月____日题型填空题选择题判断题问答题总分分数 评分人一、填空题(22 分,每空格1 1、机器性能指标体系分成两类:一是_____________结构参数,二是________参数。2、发动机冒烟有三种颜色的烟,一是__________;二是________三是___________________。拖拉机的起动电路主要由__________电源开关、起动开关、预热器和 ____________________等组成。4、拖拉机液压悬挂系统一般由_____________,___________和_______________三大部分组成。5、小型拖拉机液压系统的柱塞泵,其上方有一单向阀。柱塞供油时单向阀______________ 、变速器的装配一般分为两步进行,一是进行_____________的装配,二是进行____________装配。9、按获取机器技术状态信息的手段,技术诊断方法分为_______诊断法和_________诊断法。10、主观诊断有__________、、_______和触诊五种方法。二、选择题(将正确答案的代号填入括号内。20 分,每小题2 1、职业道德是指从业人员在职业活动中应遵循的(规章制度B、行为准则社会公德D、传统习惯2、职业素质的核心内容是(文化基础知识C、专业知识和专业技能
3、能保证瞬时传动比恒定的传动方式是形带传动C、链传动D、齿轮传动 4、普通螺旋千分尺的测量精度为(A、0.1mmB、0.05mm C、0.01mm D、0.001mm 油选用时,原则上要求柴油的()低于当时的气温。燃点B、闪点D、粘度6、汽油选用的主要依据是发动机的(排量B、压缩比新旧程度D、冷却方式缸体B、气缸C、缸盖9、配气机构主要由()等组成。活塞组和连杆组B、气门和进排气管C、气门组和气门传动组10、柴油机的燃料供给系一般由柴油箱、柴油滤清器、输油泵、油管、()等组成。泵和喷油嘴B、集滤器和喷油器C、喷油泵和喷油器D、喷油泵和火花塞判断题(对“”,错“”。30分,每小题1、拖拉机驾驶员不仅要遵守一般的法律、法规,还要严格遵守农业机械操作规程、农机安全监理规章和道路管理规定等。(2、灰口铁铸造性能好,易切削加工,有较好的减振性和耐磨性。(汽油机油箱中的汽油,长时间存放后会产生胶质。( 5、纳基润滑脂具有良好的耐热性,但耐水性差。(7、皮带传动是依靠带与带轮间的摩擦力传动的。(9、故障的表现形式称为故障征象或故障模式。(10、发动机的排气烟色为白色,表明燃料燃烧不完全。(12、拖拉机液压系统安全阀的压力不能随意调整。(13、发动机的排气烟色为白色,表明燃料燃烧不完全。(111一林红叶一霜染,一场秋雨一地寒。一栏落霞一处忧,一卷诗情一夕游。一渡飞瀑半山下,一
拖拉机自动驾驶变速机构控制器的研制1 祝仕平,毛恩荣 中国农业大学 100083 E-mail:lusonly@https://www.doczj.com/doc/a215977320.html, 摘要:本文简要介绍了国内外拖拉机自动驾驶技术的研究现状,论述了拖拉机自动驾驶系统的关键技术、拖拉机自动驾驶变速系统的组成部分以及变速机构控制器的控制对象。针对铁牛654拖拉机,提出了变速机构控制器的系统结构、控制原理以及软件设计方案。 关键词:拖拉机自动驾驶,变速机构控制器,ARM 1 引言 随着计算机技术、全球卫星定位技术、地理信息技术的发展以及精细农业的兴起,国内外许多研究机构开始围绕拖拉机自动驾驶技术展开研究工作。国外在农用车辆自动驾驶方面的研究进行得较早,20世纪70年代,世界各国许多工程师都对农田机械的自动导航进行了研究【1】。20世纪80年代末以来,随着传感器性能和性价比不断地提高,工程师们又研究出以机器视觉传感器和全球定位为核心的农田机械自动导航系统。1999年,法国雷诺拖拉机公司与法国Cemagref研究中心和法国巴斯卡尔(Pascal)大学电子自动化科研实验室合作,经过两年多的研制和实验,研制成功首台通过GPS操作的无人驾驶(自动)农用拖拉机。GPS 系统以及用于定位的传感器的最新发展,使农用拖拉机无人驾驶的研究出现繁荣景象,美国、日本、英国、丹麦、德国以及荷兰等国开始围绕拖拉机自动驾驶展开研究,并取得了一些成果【2】【3】【4】。在国内,针对拖拉机自动驾驶的研究较少,目前主要有:南京农业大学、西安交通科技大学对拖拉机视觉导航的研究以及中国农业大学对触觉式秸秆导向的研究【5】【6】。 拖拉机自动驾驶系统主要包括导航控制、路径规划、自动转向、自动变速等关键技术。其中,自动变速系统的ECU控制对象除了自动变速器中的选档机构、换档机构、离合机构,还包括油门机构、制动机构。本文所研究的变速控制器控制对象为制动机构、离合机构、油门机构,旨在实现拖拉机自动起步、加速、恒速、减速以及停车等功能。 2 系统结构 本项研究采用AMR7系列LPC2292芯片作为控制器ECU【7】【8】,如图1所示,控制器主要分为以下四个模块: ⑴A/D采集模块 对车速传感器、制动压力传感器、离合位置传感器的信号进行A/D转换和数据采集。 ⑵GPIO输出模块 1本科题资金来源:“中国农业大学211工程”重点学科建设项目。 -1-
标准编号标准名称采标情况代替标准 拖拉机综合 GB 6230—1986 拖拉机操纵装置的安装位置和操作方法 GB 6376—2008拖拉机噪声限值GB 6376—1995 GB/T 6960.7—2007 拖拉机术语第7部分:驾驶室、驾驶座和覆盖件GB/T 6960.7—1995 GB 7258—2004 机动车运行安全技术条件GB 7258—1997 GB/T 15369—2004 农林拖拉机和机械安全技术要求第3部分:拖拉 机 ISO 4254-3:1992,IDT GB/T 15369—1994 GB 16151.1—2008 农业机械运行安全技术条件第1部分:拖拉机GB 16151.1-1996, GB 16151.2-1996, GB 16151.3-1996 GB/T 20341—2006 农林拖拉机和自走式机械操作者操纵机构操纵 力、位移量、操纵位置和方法 ISO/TS 15077:2002, IDT JB/T 6677.1—1993 农林拖拉机和机械、草坪和园艺机械通用操纵装置 的位置和操纵方法 eqv ISO 3789.1:1982 JB/T 6677.2—1993 农林拖拉机和机械、草坪和园艺机械草坪和园艺机 械的操纵装置的位置和操纵方法 eqv ISO 3789.3:1989 GB/T 3871.7—2006 农业拖拉机试验规程第7部分:驾驶员的视野ISO 5721:1989,MOD GB/T 3871.7—1993 GB/T 3871.8—2006 农业拖拉机试验规程第8部分:噪声测量OECD R5:2002,MOD GB/T 3871.8—1993 JB/T 6712—2004 拖拉机外观质量要求JB/T 6712—1993 电气仪表 GB/T 20948—2007 农林拖拉机后视镜技术要求 GB/T 20949—2007 农林轮式拖拉机照明和灯光信号装置的安装规定 GB/T 25424—2010 农林拖拉机和机械风挡玻璃雨刷器 JB/T 6701—2008 拖拉机前照灯
大中型拖拉机驾驶员培训教学计划、教学大纲 第一篇大中型拖拉机驾驶员培训教学计划 一、培训目标 通过培训,使学员掌握道路交通安全和农机管理法律、法规及农机安全规章;熟悉大中型拖拉机及其配套机具的基本知识;懂得使用维护技术;具备独立操作技能;遵纪守法,具有良好的职业道德;达到大中型拖拉机驾驶员考试要求的水平。 二、培训对象 符合拖拉机驾驶证申请条件,报名参加培训者。 三、课程设置和顺序 (一)道路交通安全法律、法规和农机安全规章 (二)大中型拖拉机基础知识 (三)大中型拖拉机安全驾驶技术 (四)大中型拖拉机及配套机具使用技术 (五)实习 四、教学要求 (一)了解《中华人民共和国道路交通安全法》、《中华人民共和国道路交通安全法实施条例》、农机安全管理法规及规章,具有较强的安全意识。 (二)熟悉大中型拖拉机发动机、底盘和配套机具的基本构造、工作原理。 (三)掌握大中型拖拉机场地驾驶、道路驾驶、配套机具挂接和田间作业技能以及安全驾驶知识。 (四)学会大中型拖拉机及其配套机具的维护保养技术和常用调整方法;会分析排除常见故障;了解必要的伤员急救常识。 五、培训方式 按照“保证质量、方便学员”的原则,可采取全日制、学时制等培训方式。 六、教学方法 采用课堂讲授、实物教学、电化教学、现场教学及实验实习相结合的方法。
课堂讲授应突出重点、联系实际,借助电教设备、实物、挂图、示教板等,力求直观、形象、生动。 实习课教练员应做必要的讲解和示范,重点指导学员动手操作。每项实习各地可根据农时季节具体安排。 七、培训时间与学时分配 培训时间按学时计算,每学时为1小时。理论教学42学时;实习64学时。学时分配见《大中型拖拉机驾驶员培训学时分配表》(附后)。无论采取何种培训方式,必须达到规定学时。 八、成绩考核 培训结束后,应对学员的学习效果进行考核,检查教学质量和评定学员的学习成绩。 考核办法参照《拖拉机驾驶证申领和使用规定》中拖拉机驾驶人考试科目内容、顺序与评定标准进行。 培训机构对考核合格者发给结业证书和培训记录。 说明:“初学”是指初次参加申领拖拉机驾驶证的培训,“增驾”是指申请增加准驾机型。G表示持有准许驾驶大中型方向盘式拖拉机驾驶证;H表示持有准许驾驶小型方向盘式拖拉机驾驶证;K表示持有准许驾驶小型手扶式拖拉机驾驶证。 第二篇大中型拖拉机驾驶员培训理论教学大纲 第一部分教学内容 第一章道路交通安全法律、法规和规章 一、道路交通安全法规 (一)《中华人民共和国道路交通安全法》 (二)《中华人民共和国道路交通安全法实施条例》 (三)公安部道路交通违章及事故处理相关规定 (四)地方道路交通安全管理法规 二、农机安全监理规定 (一)《拖拉机驾驶证申领和使用规定》 (二)《拖拉机登记规定》 (三)拖拉机违章及事故处理相关规定
加工过程的复合自适应模糊控制 3 姚锡凡 副教授 姚锡凡 彭永红 陈统坚 彭 观 李春雄 摘要 设计了一种自适应模糊控制器,采用了模糊规则在线自调整和 输出比例因子在线自适应估计相结合的策略,应用于铣削加工过程的仿真结果表明,该控制器可适用于非最小相位系统,为加工过程的约束型控制提供一条有效途径。 关键词 加工过程 模糊控制 自适应 参数估计 中国图书资料分类法分类号 T P 273 3国家自然科学基金资助项目(59585006)收稿日期:1997—12—22 始于60年代初的加工过程自适应控制,可分为优化型自适应控制(A CO )和约束型自适应控制(A CC )两大类。但由于加工过程的不确定性、时变性和非线性,以及对加工性能要求越来越高,建立于对象的数学模型基础上的自适应控制难以获得满意的控制效果,甚至无能为力,加工过程的 控制至今仍未获得突破性的进展[1],为此发展不依赖或少依赖于数学模型的智能加工控制系统是必要的。但常规的模糊控制不具有自适应性,而且会出现零点极限环振荡现象,为此本文提出了一种复合的自适应模糊控制,对铣削加工过程进行控制。 1 自适应模糊控制 一般常规模糊控制涉及论域有3个,它们是误差E
K U = F r c s K P (4) 式中,c s 为常数(取0.5);F r 为力的设定值;K P 为被控对象的增益。 K P 可由下式估算得到E r (i )=F (i )-K P (i - 1)u (i -1) K P (i )=K P (i -1)+cE r (i ) (5) 式中,E r 为切削力的估计误差;F 为力的测量值;c 为常数(在下面仿真中取0.035);u (i )为进给速度(电压值)。 u (i )=K U (i )[U (i ) 12+0.5] (6) 2 仿真实验 本文以铣削加工为对象,在主轴转速恒定、铣削深度作阶跃变化下,通过检测切削力,自动调节铣削进给速度,使加工过程的切削力恒定。对于铣 削加工过程(包括伺服环节),其二阶模型可以表示为[5] F β+2ΝΞn F α+Ξ2n F =K (2ΝΞn u α+Ξ2n u )(7)式中,F 为实测的切削力;u 为进给速度(电压值)(见图1);Ν为阻尼系数;Ξn 为自然频率。 采用零阶保持器,当Ν<1时,式(7)的离散可表示为 G (z )= F (z ) u (z )=b 0z +b 1z 2 +a 1z +a 2 (8) 式中,a 1、a 2、b 0、b 1可由式(7)求得。 当采样周期T =0.05s,切削深度a p 分别为2.54mm 、1.91mm 、3.81mm 时,传递函数分别 为[6] G 1(z )=F (z )u (z )=1.3907z + 1.3257 z 2 -1.8218z +0.8409G 2(z )=F (z )u (z )=0.8346z + 0.8363z 2 -1.9642z +0.9773G 3(z )=F (z )u (z )=3.0861z + 2.8242z 2 -1.7461z + 0.7655 可以看出,传递函数随切削深度而变化,当切 削深度为1.91mm 时,已变为一个非最小相位系 统,有一个过程零点位于单位圆外(z =-b 1 b 0=-1.0021),此时常规的模型参考自适应控制(M odel R eference A dap tive Con tro l,M RA C )已 不能适用上述的非最小相位系统,要用修正的M RA C 进行控制,但修正算法较为复杂。一些研 究结果表明,模糊控制能较好地适用于非最小相位加工系统,本文采用复合自适应模糊控制(图1)实现铣削加工过程控制。 仿真实验时,取K E =0.4,K C =0.8,K U (0)=5.6338,F r =400N ,T =0.05s,结果见图2。仿 真时,首先取切削深度为2.54mm ,此时采用的加工模型为G 1(z ),在t =200T 时,让加工模型变为G 2 (z ),而在t =400T 时,让加工模型变为G 3(z )。同时对进给速度进行了限制,即0大中型拖拉机驾驶员
附件1: 大中型拖拉机驾驶员培训 教学计划、教学大纲 本计划、大纲适用于方向盘式大中型拖拉机驾驶员培训。 第一篇大中型拖拉机驾驶员培训教学计划 一、培训目标 通过培训,使学员掌握道路交通安全和农机管理法律、法规及农机安全规章;熟悉大中型拖拉机及其配套机具的基本知识;懂得使用维护技术;具备独立操作技能;遵纪守法,具有良好的职业道德;达到大中型拖拉机驾驶员考试要求的水平。 二、培训对象 符合拖拉机驾驶证申请条件,报名参加培训者。 三、课程设置和顺序 (一)道路交通安全法律、法规和农机安全规章 (二)大中型拖拉机基础知识 (三)大中型拖拉机安全驾驶技术 (四)大中型拖拉机及配套机具使用技术 (五)实习 四、教学要求 (一)了解《中华人民共和国道路交通安全法》、《中华人民共和国道路交通安全法实施条例》、农机安全管理法规及规章,具有较强的安全意识。 (二)熟悉大中型拖拉机发动机、底盘和配套机具的基本构
造、工作原理。 (三)掌握大中型拖拉机场地驾驶、道路驾驶、配套机具挂接和田间作业技能以及安全驾驶知识。 (四)学会大中型拖拉机及其配套机具的维护保养技术和常用调整方法;会分析排除常见故障;了解必要的伤员急救常识。 五、培训方式 按照“保证质量、方便学员”的原则,可采取全日制、学时制等培训方式。 六、教学方法 采用课堂讲授、实物教学、电化教学、现场教学及实验实习相结合的方法。 课堂讲授应突出重点、联系实际,借助电教设备、实物、挂图、示教板等,力求直观、形象、生动。 实习课教练员应做必要的讲解和示范,重点指导学员动手操作。每项实习各地可根据农时季节具体安排。 七、培训时间与学时分配 培训时间按学时计算,每学时为1小时。理论教学42学时;实习64学时。学时分配见《大中型拖拉机驾驶员培训学时分配表》(附后)。 无论采取何种培训方式,必须达到规定学时。 八、成绩考核 培训结束后,应对学员的学习效果进行考核,检查教学质量和评定学员的学习成绩。 考核办法参照《拖拉机驾驶证申领和使用规定》中拖拉机驾驶人考试科目内容、顺序与评定标准进行。 培训机构对考核合格者发给结业证书和培训记录。
拖拉机驾驶操作技术的掌握 发表时间:2009-10-16T10:42:08.857Z 来源:《赤子》第16期供稿作者:徐贵福 [导读] 正确地操作拖拉机,熟练地掌握驾驶技术,可以发挥机器的效能,减少机车的磨损和防止事故的发生 (黑龙江省塔河县依西肯乡农业综合服务中心,黑龙江塔河 165202) 摘要:正确地操作拖拉机,熟练地掌握驾驶技术,可以发挥机器的效能,减少机车的磨损和防止事故的发生。 关键词:拖拉机;驾驶操作;技术 随着我国农村经济的快速发展,农民购置拖拉机的数量也越来越多。但是,由于大多数农机手文化水平较低,且没有经过正规培训,加之安全意识淡薄,新手驾车就上路,往往导致车辆的损坏和安全事故的发生。因此,如何正确掌握拖拉机驾驶操作技术,对于驾驶员来说,尤其是新手,不仅是必要的,更是必须的。 1 出车前的准备 (1)出车前对拖拉机要进行认真地检查和保养,消除事故隐患,防止事故的发生。 (2)清除拖拉机各处泥土、灰尘、油污。 (3)检查连接件的紧固情况,发生松动应及时拧紧。 (4)检查三角带的张紧度和轮胎气压。 (5)检查发电机和灯光。 (6)检查转向、离合器、制动器等操作机构是否可靠;发现不正常现象,应立即排除。 (7)带上必要的随车工具,以保证及时排除故障。 2 柴油机的启动 2.1启动前的准备:启动时,必须做好启动前的准备工作,采用适当的启动方式,以减少启动负荷或磨损。 检查柴油机、底盘、电器设备及配套农机具的各部分零件是否齐全完好,有无漏油、漏气及漏水现象等。如有问题,及时进行检查修理或排除故障。检查机油、柴油、冷却水是否充足,如不足时予以添加。检查柴油机、底盘及农机具牵引装置的紧固情况,如有松动予以紧固。 2.2柴油机的启动:手摇启动:将小型拖拉机的变速手柄放在空挡位置。打开油箱开关,左手将减压手柄放在减压位置,右手握紧插入启动孔的摇把,均匀地摇持曲轴,待机油指示器计起,由慢到快,达到一定的转速时,迅速放松减压手柄,与此同时,右手继续猛摇,不可松开摇柄,以免自动甩出伤人。当启动着火后,减小油门,水温达到40℃,即可起步。 电动机启动:当气温在10℃以上时可利用直接启动法启动,方法如下: 变速杆置于空挡位置。将离合器踏板踩到底。 将熄火杆推到底,左手转动减压手柄使其减压,拉大油门或将脚油门踏到中间位置。 将钥匙插入电锁,按顺时针转动,接通电路。 将启动开关按顺时针转动到启动位置,当柴油机转速提高后,左手将减压手柄转到工作位置,待柴油机启动后,右手迅速将启动开关转回到“0”位置。 3 小型拖拉机操纵机构的运用 3.1方向盘:方向盘是用来操纵拖拉机的行驶方向的机件,它的正确握法是:两手分别握稳方向盘边缘左右两侧,按钟表时针面“小时”的位置,左手握在9~10时之间,右手在3~4时之间。 拖拉机在坎坷不平的道路上行驶时,应双手紧握方向盘。行驶中,除有一手必须操纵其他装置外,不得用单手操纵方向盘,也不要双手集中一点去掌握方向盘。 3.2离合器踏板或离合器制动手柄:离合器踏板是发动机的动力与传递部分结合或分离的机件。操作时用左脚掌踩踏板。踏下即分离,动作要迅速、果断。抬脚即结合,要有层次地缓慢,脚放在离合器踏板的左下方,操作时不准用脚心或脚跟踏动。 行驶中,不得将脚放在离合器踏板上,以免离合器出现半联动状态,加速离合器的磨损。 3.3制动踏板:制动踏板是车轮制动器的操纵装置,用以减速或停车。使用脚制动器时,应两手稳握方向盘,右脚离开油门踏板并踏下制动踏板。 右脚跟靠住驾驶室底板,以踝关节的伸屈为主踏下或放松,以达到拖拉机平稳停车的目的。 3.4油门踏板:驾驶员右脚跟靠在驾驶室底板上作为支点,脚掌轻踏油门踏板上,用踝关节的伸屈动作踏下或放松踏板。动作要轻踏、缓踏;不要连续抖动和用脚跟踏,在行驶中,除踏制动器踏板时,脚不准离开或脚全放上。 3.5变速杆:变速杯用球头安装在变速杆上端,可左右前后摆动。当拨动变速杆时,通过拨叉将滑动齿轮拨至相应位置,以便进行换挡。 变速杆球头的握法是用手掌贴住球头,五指握向手心,把球头自然地握在掌心。 3.6液压悬挂系统操纵手柄:小型轮式拖拉机的液压系统是操纵悬挂农机具的动力装置。它靠操纵手柄来控制农机具的提升高度和耕作深度。 4 基本驾驶操作技术 4.1拖拉机的起步:柴油机运转正常,水温达到40℃以上方可起步。启动前鸣喇叭,并注意观察周围有无障碍物。松开制动器踏板的锁定板。如在斜坡上起步,应在拖拉机起步的同时,逐渐放松制动踏板。 将离合器踏板踏到底,使离合器彻底分离,将变速杆平稳地推到适当的挡位上。松开离合器踏板要先快后慢,并轻踏油门踏板,当传动部分稍有震动、柴油机声音略有变化时,缓慢放松离合器踏板,同时逐渐加大油门,使拖拉机平稳起步。待拖拉机平稳移动后可全部松开,起步后不要将脚放在踏板上。 4.2行驶速度的选择及换挡:行驶速度的选择:主要根据拖拉机的负荷量,应使拖拉机接近于满负荷情况下工作,并留有适当的动力储
拖拉机自动驾驶平台的研究分类:技术研究2007-04-07 01:59 1.1研究意义 中国是一个农业大国,用占世界7%的耕地解决了世界22%的人口温饱问题,取得了举世瞩目的成就。目前,我国面对“人多地少,资源短缺,环境恶化,人增地减”的趋势不可逆转。保证21世纪我国16亿人口的食物安全,关键在于推动农业科技的进步。正如江泽民同志所指出的“中国的农业问题,粮食问题要靠中国人自己解决。这就要求我们的农业科技必须要有一个大的发展,必然要进行一次新的农业科技革命”。纵观世界现代农业发展动态,一个新的农业科技革命的序幕已经拉开。以生物技术、信息技术为先导的现代科学技术发展及其在农业上的广泛应用,为世界各国农业发展提供了前所未有的机遇。“精细农业”技术正是在这种环境下应运而生,成为农业信息技术应用的一个重要分支。其核心是用现代高新技术特别是信息技术来改造传统农业,在机械化的基础上,把地理信息系统(GIS)、定位系统(GPS)、决策支持系统、传感技术进行集成,使作物生产更加科学,减少投入,提高产出,实现高效利用各种农业资源,保护生态环境的农业可持续发展目标[1]。 我国60岁以上的老年人口已近一亿(约有70%居民在农村),约占全世界老年人口的22%,占亚洲老年人口的50%。进入二十一世纪后,我国面临着比现在(现在就是二十一世纪,与前面的“进入二十一世纪后”矛盾,应该指出:“现在”的具体年份;或指出前面“二十一世纪”的间段,如二十一世纪中叶)多三、四倍的老年人,人口老龄化会对生产、消费、劳动生产率、产业结构等产生巨大影响[2]。改革开放以后,中国劳动力产业结构转换的进程加快。到1998年,中国第一产业就业人口所占比重已降至49.8%,比1980年下降了19个百分点,第二、三产业所占比重分别上升至23.7%和26.4%。中国劳动力产业结构转换速度已超过了同期东北亚的大多数国家。农村劳动力平均年龄也由10年前的不到37岁上升到40岁。据预测,即使(“即使”是否该改为“随着”)城镇化进程加快,到2040年人口老龄化峰值期,60岁以上人口将超过4亿人,农村老年人口总数超过城镇[3]。因此为了应对农业就业人口的减少和老龄化问题,必须加速农业机械化和信息化的发展。 农业作业若不采用机械化,“精细农业”就无法实施。如联合收割机、播种机、施肥机、喷药机、喷灌机等。(不是单独句子,需重组)机械化、自动化程度越高,越利于实施“精细农业”[1]。拖拉机是实现各种机械化作业的动力,是农业生产中最重要的动力机械。它可以与附装的、悬挂的或牵引的农机具一起完成大部分的田间作业,还可以牵引挂车进行运输作业,所以拖拉机是精细农业实施的一个必不可少物质载体,相应地,拖拉机的自动驾驶则是精细农业系统的一个有机组成部分。 /*(以下部分的说明好象有点混乱,我建议对以下2段落中的语句进行重组,从两方面来说明拖拉机自动驾驶的必要性:1.拖拉机自动驾驶能够满足农业作业的精度――农田作业按精度,农机手和自动驾驶的精度;2. 拖拉机自动驾驶能够提高农业劳动的生产率,从而提升中国农业产业在国际上的竞争力――拖拉机作业环境和作业工况,自动驾驶的利点)由于拖拉机在工作方式上与汽车有很大不同,特别是拖拉机的作业环境比较恶劣,作业工况复杂多变,再加上农机操作手技术水平的差异等原因,导致耕作精度低,造成土地资源浪费,并且不能保证拖拉机在作业中的生产效率和燃油经济性。这样即使是拖拉机本身已经具有了较好的设计性能指标,也往往由于使用者的个人经验不足、熟练程度不同而难以完全发挥出来,如何将汽车自动驾驶技术合理应用于拖拉机是一项艰巨而意义深远的任务[21-25]。Auernhanmmer和Muhr1991年将农田作业按精度分为粗糙作业(rough operations)如土壤采样(soil sampling)、除杂草(weeding);精细作业(fine operations)如喷洒农药(pesticide
仅供参考[整理] 安全管理文书 拖拉机安全驾驶操作规程 日期:__________________ 单位:__________________ 第1 页共3 页
仅供参考[整理] 拖拉机安全驾驶操作规程 1.此类设备属特种作业设备,必须持证上岗,上岗证由市劳动部门统一颁发。 2.停车库应备有消防器材,司机应熟练掌握使用灭火器材的方法。 3.严禁酒后驾驶,行驶中不准吸烟、饮食和闲谈。 4.严禁超载或超长、超宽、超高装载;滚动物品必须绑扎牢固。 5.严禁拖拉机牵引挂车超车、超高和高速行驶,以免发生翻车事故。转弯时须低速行驶。 6.下坡道之前,应根据拖载情况和坡度的大小,选择适当档位,在陡坡行驶的途中,不要换档。在下陡坡时,应挂低档,缓慢行驶,严禁空档滑行,以免发生事故。下坡时不要猛踩制动器,以免发生拖拉机倾翻的重大事故。 7.牵引挂车行驶前,应把左右制动踏板连在一起,并检查制动器是否可靠,左右制动是否同步。 8.挂车中不得乘人。 9.拖拉机挡泥板的牵引杆不得乘坐人员,以免行驶中掉下发生事故。 10.牵引车后部与挂车前部,必须安装防护网、保护链及有效的制动器,以免脱节出事故。 11.挂接挂车时,须用低速小油门倒车,并随时做好停车准备。插牵引销时,必须在拖拉机停止时进行,以免伤人。 12.牵引平板车行驶时,不准在平板车上坐人,以免掉下发生事故。 13.行驶中应尽量保持匀速。起步、停车要稳,以免拖拉机和挂车发生撞击。 第 2 页共 3 页
仅供参考[整理] 安全管理文书 整理范文,仅供参考! 日期:__________________ 单位:__________________ 第3 页共3 页
基于自适应模糊控制的拖拉机自动导航系统 摘要:阐述了一种基于自适应模糊控制的拖拉机自动导航系统。由PLC、电控开关液压阀和比例方向液压阀组成自动转向控制系统,设计了PD转向控制算法;为提高拖拉机自动导航的精度和稳定性,提出了一种基于遗传算法的自适应模糊控制方法,采用遗传算法在线优化模糊控制规则以及输出比例因子,既保留了传统模糊控制的优点,又有效了改善了系统的控制品质;仿真和田间实验结果表明,该方法可以迅速消除跟踪误差,相应速度快,超调小,系统工作稳定,稳态跟踪误差不超过10cm。 关键词:拖拉机;模糊控制;遗传算法;自动导航;自适应控制 引言 为提高农用车辆自动导航的精度和稳定性,许多学者对其导航方法进行了研究。文献[1~11]分别对线性模糊控制方法、模糊控制方法、最优控制方法、神经网络控制方法以及纯追踪算法进行了研究。总体来说,目前对于自适应导航控制方法研究较少。 模糊控制具有不依赖精确的数学模型、鲁棒性好等特点。对于一个确定的模糊控制器,当被控对象受到参数摄动和外部干扰等不确定因素影响时,仍可以保证系统最终趋于稳定,但是会降低系统的控制品质,出现诸如振荡加剧、过渡时间过长等缺点。因此有必要研究自适应模糊控制方法,在控制过程中的不同阶段,对模糊控制器进行自动调整。拖拉机本身是一个具有大延迟、高度非线性以及时变性和不确定性的复杂系统,而且农田地况较差,轮胎和地面作用过程复杂,难以建立精确的数学模型,因此应避免运用车辆模型进行控制,但是也应该充分挖掘车辆模型所蕴含的车辆状态信息,以改善导航系统性能。 本文提出一种基于遗传算法的自适应模糊控制算法,以RTK-DGPS为导航传感器,构建拖拉机自动导航系统,并进行拖拉机田间自动导航实验。 1 拖拉机自动导航控制系统 研究平台为福田雷沃FT704拖拉机,前轮转向,后轮驱动。自动导航控制系统如图1所示。