四轮定位仪测试原理及应用
作者本站站长
二零零四年一月
四轮定位仪测试原理及应用
*更多相关资料请访问:https://www.doczj.com/doc/a113529682.html,“这方热土”专栏。*四轮定位仪是整车行驶方向性检测和调整的设备,其正确使用和维护对整车质量至关重要。这里,结合我对美国宝克公司四轮定位仪使用过程的了解,对其工艺、测试过程、测试原理及使用中存在的问题,做出一些探讨,供大家参考,并希望同行不吝指正。
一.四轮定位仪的任务:
四轮定位仪是一台整车行驶方向性的测试调整设备。对马自达车来讲,必须同时调整前后轮;对红旗产品,则只调整前轮。
一般地,四轮定位仪要求完成如下测试项目:
1.推力角。
2.前束(前轮前束、前轮总前束、后轮前束、后轮总前束)。3.外倾(前轮外倾、后轮外倾)。
4.主销内倾角。
5.最大转向角。
目前,我们的设备主要测试前后轮的前束、外倾,并计算推进角;同时,还校正方向盘。
二.设备工作流程
(一)、设备流程
设备工作流程如下:
扫描→轴距调整→车辆上线→测试开始→车轮旋转→对中→浮动板释放→挡车滚筒上升并锁死→滑门打开→大灯检测开始→安装方向盘规→轮胎检测→四轮调整→测量结束→车轮停止→浮动板锁定→对中退回→挡车滚筒落下→打印测试结果→取下方向盘规→车辆下线。
(二)、流程解释
1、扫描——用条码枪扫描条码,识别车辆VID代码。
2、轴距调整——根据车型自动变换轴距,即前后辊子中心距离,以便和测试车辆前后车轮中心间距吻合。
3、车辆上线——车辆移动到设备的前后辊子上。
4、测试开始——按开始循环按钮,测试过程开始。
5、车轮旋转——电机拖动辊子开始旋转,带动车轮旋转。
6、对中——对中装置从内侧扶正轮胎,对中压力根据经验,在50公斤力左右比较合适。
7、浮动板释放——车轮下面支撑的浮动板释放,使车身处于自由浮动状态。
8、挡车滚筒上升并锁死——为防止车冲出设备,机械结构上设置了挡车滚筒。
9、滑门打开——设备滑动板打开。
10、大灯检测开始——大灯测试仪测试大灯光形、亮度等。
11、安装方向盘规——安装方向盘规,校正方向盘,把车轮摆正。
12、轮胎检测——激光装置测量四个轮胎位置和角度。
13、四轮调整——根据屏幕显示的前后轮前束、外倾值,手工调整轮胎位置。
14、测量结束。
15、车轮停止。
16、浮动板锁定——测试结束后,锁死浮动板。
17、对中退回——对中装置退回。
18、挡车滚筒落下——落下挡车安全装置。
19、打印测试结果——把所有测试项目通过纸带打印机打印出来。
20、取下方向盘规。
21、车辆下线。
三.四轮定位仪的测试结构
四轮定位的精度主要取决于测试方法和测试结构,且二者有密切的关联。
按照测量结构和测量方式的不同,目前四轮定位仪大致有以下几种分类:
(一).接触与非接触式测量:
1.接触式测量:使用探头式差动变压器,测量车轮的端面高度变化。
2.非接触式测量:使用激光传感器,测量车轮的端面高度变化。(二).二传感器与三传感器测量:
非接触式测量又分为:
1.二传感器形式:两个传感器测量车轮的X、Y方向位置信息。先是在水平位置进行一次检测,然后传感器支架回转90度,再测量Y方向。两次测量的结果作为车辆调整的依据。调整结束后,将再次用同样方法检测车辆轮胎,不合格再次调整,直到合格为止。
2.三传感器形式:用三个传感器进行测量,三个传感器成品字形布置,分别处于9点、12点、3点钟位置。3点、9点传感器用来测量X方向的轮胎位置数据,上面的12点传感器和底下两个的中点连线,用来测量轮胎Y方向的位置数据。
我们的设备使用的是三传感器非接触式测量。
(三).动态调整和静态调整:
按照调整方式的不同,系统又分为两种:
1.动态调整:动态调整是在车轮旋转时进行测量和调整,测量和调整是同步完成的。
2.静态调整:静态调整则是在车轮旋转时测量,静止的时候调整,这种方式对节拍影响比较大。
我们使用的是动态调整方法。
四.四轮定位设备的测量原理
(一)、四轮定位仪测量的基本数学方法
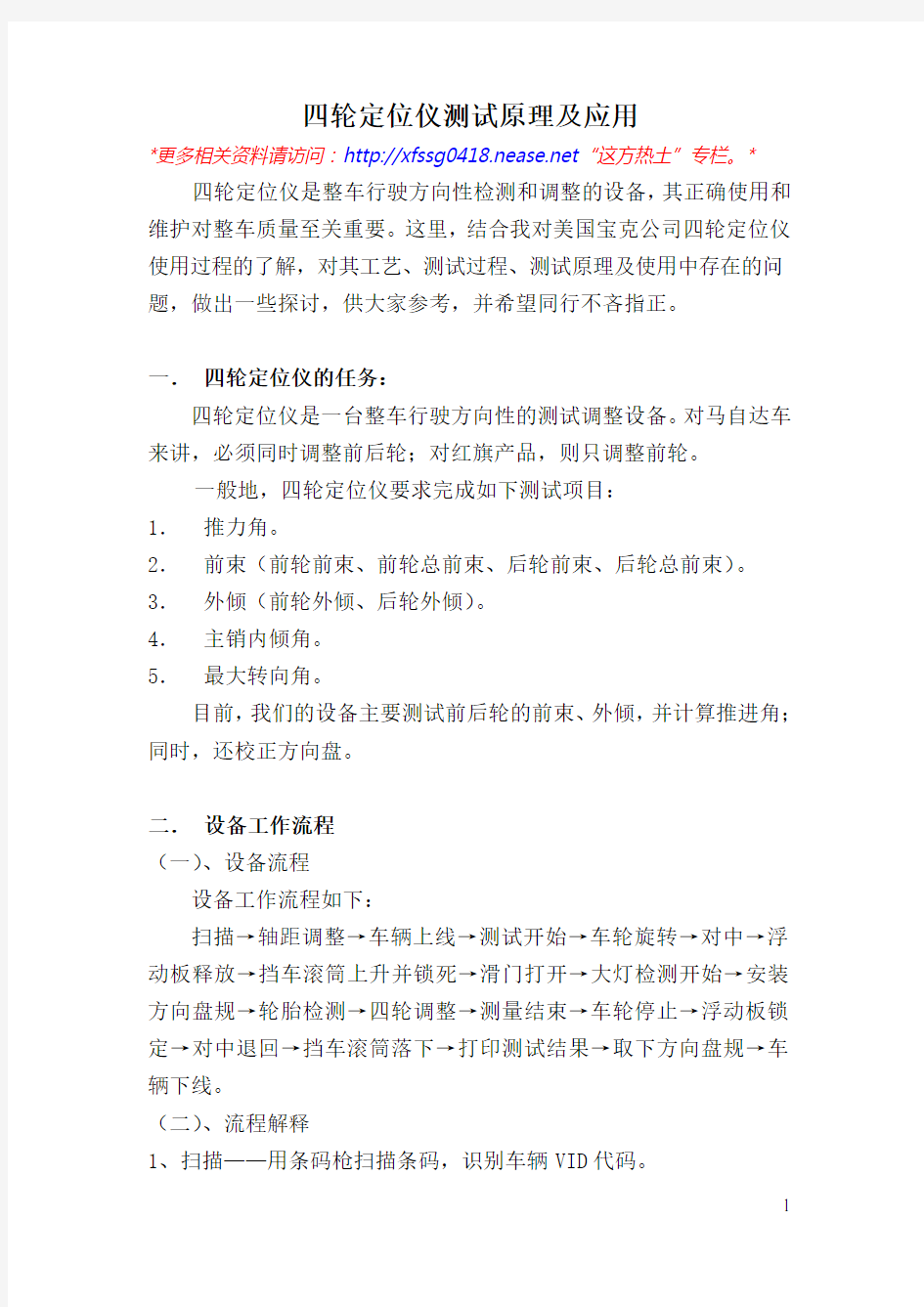
四轮定位仪用三个品字形布置的激光头测试轮胎的三个位置的距离,形成一个平面。为平均误差,每个位置的距离实际上是采集十
多个激光点的反射距离来平均确认的。
左图是一个激光头发射激光的局部
示意图。
12点激光头
12点激光头的发射光线
3点激光头的发射光线
图1:激光测量装置
前束和外倾的计算是利用每个轮胎测试的三个点形成的平面倾角来计算的。车轮前后中心径线和车辆前后中轴线的夹角称之为前束,车轮上下中心径线和地面垂线的夹角称之为外倾。
测量的距离信号通过模数转换板进入到计算机系统,经过数学分析计算出前束、外倾值。
(二)、前束计算
假设:n1:每个传感器光束的采集点数,n2:计算机系统的采集次数,Li:每个激光点测量到的距离值,L:计算出来的平均距离,Toe:前束,Cam:外倾。D:轮胎测试圆直径。“前”、“后”指前后激光传感器。
每次采集的前束值为:
Toe i=arctg[(L前-L后)/D]
n1 n1
= arctg{{[ (Σ L i前)/n1] - [ (Σ L i后) /n1]}/D} ---------(1) i=1 i=1
平均前束为:
n2
Toe = Σ Toe i
i=1
如果方向盘转角θ不为零,则还要根据传动λ比把方向盘对前束的影响折合成一个角度θ0,总前束的计算要把这个角度减掉。即:θ0=θ×λ
实际前束为:
n2 n2
Toe = Σ Toe i -θ0 =Σ Toe i -θ×λ ------------(2) i=1 i=1
(三)、外倾计算
Cam i=arctg[(L上-L下)/D]
n1 n1
= arctg{2×{[ (Σ L i上)/n1] - [ (Σ L i下) /n1]}/D} i=1 i=1
其中,L i下指下部前后两个激光头测量距离的平均值。即:
L i下=(L i前+ L i后)/2
实际外倾值为:
n2
Cam = Σ Cam i
i=1
在工人调整时,整个测量过程是动态的。测量结果可以动态显示在两个屏幕上,操作者可以通过屏幕显示把握调整状态,直到调整合格为止。
整个程序的编制是使用C语言进行编程的。
(四)、其它算法技术
实际上,厂家还采用了如下软件技术:
1)轮胎壁过滤算法——以消除轮胎变形及字母影响。
软件上设置了一个过滤器,对固定旋转圈数的测量数据进行处
理。其长度:
N=f (采样频率,车轮转速)
即根据采样频率和转速确定过滤器数据容量。
经过过滤运算的前束外倾值能够比较真实地反映轮胎位置状态。
2) 轮胎边缘跳动补偿——去掉轮胎边缘周期性的跳动。 软件根据轮胎状态的平均趋势,判断异常跳动,把它从计算数据中剔除。
五.系统控制结构简介
本文的目的,是力图通过设备技术更多地去分析工艺实现过程,以解决整车问题。毕竟计算机控制技术和软件技术属于基础控制理论范畴,不是本文讨论的重点,因此没有致力于做详细的讨论。这里只是给出一个简单的系统示意图,目的是使大家了解设备的基本系统结构。
下图给出了控制系统的物理结构,从这里,我们非常容易了解系统的整体硬件控制结构。
图2:四轮定位仪控制系统物理结构
VID 代码输入站 报告打印机 控制柜 地坑监视器 纸带打印机
目前,我们的四轮定位设备使用的是486级芯片、DOS5.0操作系统来作为测试平台。设备整体逻辑控制由槽式PLC来完成,该PLC 兼容AB公司的ControlLogix 5/04。系统采用VME工业总线技术,插卡式结构。
12个传感器的数据被送到6个A/D转换卡中,经过A/D转换后,送计算机系统进行分析计算。计算结果通过可视化图象,直观显示到屏幕上,作为操作工人调整的依据。
系统除测试外,还具备数据历史记录、标定、外部数据交换、打印、系统状态可视化查询等功能。
六.四轮定位影响跑偏的相关因素探讨
车辆出现跑偏是四轮定位工序经常遇到的一个异常棘手的问题,产生问题的原因非常复杂。由于它和整车质量息息相关,探讨它有其特殊的应用价值,因此这里把我的个人观点写出来,供大家维修参考。
我经过一系列分析和调研,基本认为如下因素会对车辆跑偏造成影响。我们维修中,可以借鉴其中的部分结论,作为确定原因的依据。
1.四轮设备的标定:如果设备基准漂移或变化,会产生跑偏,多数跑偏可以通过重新标定四轮定位仪来解决。
2.后旋架分装机:该设备控制不好,会对跑偏产生影响。这时,可以检查其状态或重新标定。
3.车辆后旋系统设计问题:MAZDA的车辆也有少量跑偏现象,每天都有几台。他们认为是后旋系统的设计问题,目前,MAZDA产品部门正在研究。
4.传感器信号通道故障:可以通过监视成像图象来比较。通过对十二个传感器图形的比较,可以找到传感器是否有损坏。
5.对中器问题:厂家认为,对中器对调试影响很大。如果力量过大,会使车轮变形。最合适的压力在50公斤左右。
6.轴距问题:如果设备轴距不合适,加上我们的车辆轴距波动较大(10毫米),可能造成浮动机构和设备固定结构的干涉,使调整
结果受到影响。
7.环境干扰问题:环境光线对设备会造成影响。我们的设备在下午时,环境光线很强,是否会有比较大的影响有待观察。必要时,可以采取遮光措施。
8.辊子的中心高:左右辊子中心高是否在一个水平上将对测量结果产生一定影响。
9.浮动机构:是否有间隙,旋转是否灵活。
10.轮胎压力:轮胎压力必须均衡,否则也会影响跑偏。
11.整车装配间隙问题:MAZDA也认为旋架系统装配间隙偏大,这样就能解释经过路试的车辆回来与路试前一致性不好的问题。这可以通过适当加长震动格栅的方法来解决。
12.方向盘水平:方向盘的调整基准如果不正确,对整车导向系统会造成不良影响。这时,要重新校正方向盘倾角仪。
13.控制标准问题:我们的国家标准比日本更加严格。比如跑偏距离,我们的国标是每百米允许0.5米,而日本是2米。标准上比较大的差异,是形成产品设计控制不严的一个原因。
14.左右置方向盘对调问题:日本MAZDA产品设计是右置方向盘,而我们改为左置结构。大家都认为会带来影响,但影响多大有待确认。
15.推进角问题:MAZDA推进角设计偏大,认为会有轻微影响。
16.基准架与标定方法:基准架如果不出现磕碰,一般不会对跑偏构成影响。它是通过三坐标测量的,厂家没有向我们交代过测试基准架的手段和方法。目前我们使用的宝克公司设备测量基准架一共要测算72项数据,并输入到计算机系统中。
至于实际标定,我们的标定只标零度。而目前比较合理的标定形式,除零度外,还标1度或者3度、5度等。这样实际上是既标零点,也标增益,更有利于提高标定精度。
17.车体高:车体高度对跑偏有轻微影响。前期底盘加高后,跑偏有一定改善。
18.测试方法问题:MAZDA要求调整后轮时,驾驶室不能上人,
调整前轮时,驾驶室要有人。这样做主要是考虑配重问题,他们认为这样会对调试结果有影响。我们的工艺则没有这样的要求,但基本也能控制在公差范围内。
以上因素,都和车辆跑偏有一定关系,因此,我们要和工艺、质量保证部门共同探讨车辆跑偏的可能原因,以期得到正确的结论。
七.常规维修操作方法
为了对我们四轮定位设备的维修有所帮助,这里把一些有一定技术性的维修方法写出来,以期对我们的工作起到一定的指导作用。(一)、对激光头的标定
本标定用于标定激光头。
1.确认WHEELBASE选择开关在AUTO位置。
2.在前轮设备工序前的液晶面板上输入W1,回车。此时,车型选择为红旗车型,轮距自动切换到红旗轮距。
3.把标定架吊下,放置在四轮定位仪辊子上,前后定位销插入定位孔。
4.用遮蔽物挡住几个激光传感器顶部,防止环境光线干扰。关断设备地坑灯。
5.在主电箱上三位选择开关CALIBRATION的“OFF/ON/START”
中,由OFF位置拨到ON。
6.再由“ON”拨到“START”,松手,开关自动弹回ON位置。
标定开始。
7.激光传感器向基准面发射激光,屏幕底部会以#XXX形式显示标定项目代码,每次标定项目代码可能不同。这个过程可能
要几秒到几分钟。
8.结束后,左下部显示“TURN KEY TO OFF REMAIN CURRENT VALUE”(钥匙开关拨到OFF保留原值)及“TURN KEY TO START
ACCEPT NEW VALUE”(钥匙开关拨到START接受新值)。如果
要接受标定结果,把CALIBRATION开关拨到START位置一次,
自动弹回ON位置。
9.等待数据调整和存储,过一会,屏幕左下部显示“TRUN KEY TO OFF”。把CALIBRATION开关拨到OFF位置。
该标定无须经常做,厂家建议半年左右做一次即可,或者在更换、拆装传感器后做一次。如果需要做,要在做激光传感器重复性标定之前做这个标定。
(二)、标定激光传感器重复性
该标定的物理含义是:标定四组传感器的平行度偏差,把偏差值自动设置到设备补偿数据中。
1.确认WHEELBASE选择开关在AUTO位置。
2.在前轮设备工序前的液晶面板上输入W1,回车。此时,车型选择为红旗车型,轮距自动切换到红旗轮距。
3.把标定架吊下,放置在四轮定位仪辊子上,前后定位销插入定位孔。
4.用遮蔽物挡住几个激光传感器顶部,防止环境光线干扰。关断地坑灯。
5.控制箱计算机键盘上按ESC。
6.选择TEST菜单。
7.选择EV master gauge,回车。
8.按空格键,等待面板显示“when main gauge is in place press space to continue”。
10.再次按空格键开始标定。
11.一共四组数据需要标定,每组7项。每标定完一组,屏幕给出提示。按SPACE标定下一组。
12.四组标定完成后,如要打印数据,请标定前先连接好打印机,此时可以点击P键,打印标定数据。
13.按ESC键退出标定。
14.如果前轮各构件没有在原位,把设备切换到手动方式。按各构件手动按钮,使回原位。此时,状态灯下部绿灯全部点
亮。再切换到自动方式。
15.在前轮设备工序前的液晶面板上输入W3。此时,车型选择为MAZDA车型,轮距自动切换到MAZDA6轮距。
16.主柜计算机键盘上,移动菜单到QUIT。
17.选择RETURN,回车。
18.屏幕进入M6工作界面显示。如果回不到M6界面,要检查设备原位绿灯是否全部点亮。
19.界面上,如果后轮公差显示条为通绿,则再次ESC退到管理界面。并在QUIT菜单下选择RETURN回到M6工作界面。
后轮公差将被显示在画面上。
此时,可以恢复正常调车操作。
该标定建议半个月左右做一次,并打印存档。作为质量控制点设备,该标定质量保证部门要求有周期性标定记录。如果车辆道路试验连续出现跑偏现象,就应该考虑重新标定传感器和传感器的重复性。(三)、传感器图象监视及分析
A.监视方法
对四轮定位仪的12个激光传感器,可以动态监视其成像图像。这一功能对维修有重要意义,我们可以根据图象的比较来判定传感器的好坏。
在生产调整、传感器标定等动态或静态过程中,我们都可以监视传感器图象。方法是:
1.正常工作界面下,在计算机键盘按ESC。
2.用左右箭头键选择DISPLAY(显示)菜单,回车。
3.选取CAMERA STATE(镜头状态)命令,回车。
4.用上下箭头选取ON,回车。
5.ESC退到DISPLAY(显示)子菜单下。
6.用上下箭头选取CAMERA GRAPHS(镜头图像),回车。
7.用上下箭头选取:
ALL CAMERAS:所有镜头。
LF FRONT CAMERA:左前前镜头。
LF TOP CAMERA:左前顶镜头。
LF REAR CAMERA:左前后镜头。
RF FRONT CAMERA:右前前镜头。
RF TOP CAMERA:右前顶镜头。
RF REAR CAMERA:右前后镜头。
LR FRONT CAMERA:左后前镜头。
LR TOP CAMERA:左后顶镜头。
LR REAR CAMERA:左后后镜头。
RR FRONT CAMERA:右后前镜头。
RR TOP CAMERA:右后顶镜头。
RR REAR CAMERA:右后后镜头。
之一,再回车。屏幕显示对应项目图象。
8.观察图象形状是否正常。观察过程中,可以用手去遮挡传感器发射与接收镜头,观察图象变化。以此可以判断激光
头和线路好坏。
9.观察结束后,用ESC退到DISPLAY(显示)子菜单下。
10.选取CAMERA STATE(镜头状态)命令,回车。
11.用上下箭头选取OFF,回车。(实际上,置于ON也不影响生产调试。标定时,此项必须处于ON。)。
12.用ESC退到DISPLAY子菜单下。
13.选取SET DEFAULT(选择缺省值),回车。
14.选择YES ,回车。
15.ESC退到主菜单。
16.左右箭头移动到QUIT菜单命令,回车。
17.上下箭头选取RETURN,回车。系统进入调整生产画面。
用上述观察传感器图象的方法,可以动态监视标定架、车轮及随机物品的图象。籍此可以判断系统是否正常及问题类型。
B.成像图及其分析
当对传感器进行标定时,如果出现传感器图象或通讯异常报警,可以查询传感器图象,并按照如下表格中的方法排除。只有在没有任
异常成像分析如下:
表1:异常成像分析处理表
(四)、轮距调整
对四轮定位仪,调整轮距的具体方法如下:
1.正常工作界面下,在计算机键盘按ESC。
2.用左右箭头键选择SETUP菜单。
3.选取WHEELBASE POSITION命令,回车。
4.输入密码OCPEB,回车。
5.在设备前面小操作台上选择W1-3(先按W,后按1-3之一。
红旗有两种ABS,分别对应W1、W2,M6为W3)。
6.电箱门上的WHEELBASE选择开关拨到左侧JOG(点动)位置。
7.用主电箱上JOG WHEELBASE SHORTER(轮距缩短)和JOG WHEELBASE LONGER(轮距加长)按钮,调整轮距位置。
8.调整到合适轮距后,在设备前方小操作台按WP(先按W,再按P),数据被存盘。
9.在主柜上,用键盘右箭头把光标移动到最右侧菜单QUIT项,选择RETURN,回车,退出到工作界面。
10.把WHEELBASE选择开关拨回到AUTO位置,可以开始正常车辆测试。
(五)、方向盘倾角仪校准操作说明
如下方法可以对方向盘倾角仪进行校准:
1.检查倾角仪支架是否处在0°位置。
2.观察支架上的水平仪,并调整倾角仪支架底板上的三个调整螺丝将支架调整至水平。
3.将倾角仪卡放在支架上。
4.按下倾角仪控制箱上的黑色校准按钮(calibration)两次。
5.按照显示屏上的提示将倾角仪旋至-60°位置固定,并按下控制箱上的校准按钮一次。
6.再依次根据提示分别将倾角仪旋至 -45°、-30°、-15°、0°、15°、30°、45°、60°等位置按下校准按钮。
7.当完成60°位置的校准后,仪器将发出警报声,屏幕显示当前位置为60°。
8.这时操作者将倾角仪旋回零度位置即完成校准操作。(六)、PLC程序操作提示
使用笔记本电脑的Rslogix5编辑软件对PLC进行操作的相关方法索引如下:
1.连接电缆,笔记本电脑接口为RS232串口,PLC侧接口在PLC
主机上类似键盘插口的接口。
2.双击笔记本电脑对应的PLC编辑软件图标。
进入如下菜单:
F1 SELECT PROGRAM/PLC-5 ADDR(选择程序/PLC-5地址)F2 OFFLINE PROGRAMMING/DOC(离线编程/资料)
F3 ONLINE PROGRAMMING/DOC(在线编程/资料)
F4 REPORTING OPTIONS(报告选项)
F5 UTILITY OPTIONS(通用选项)
F6 UP/DOWNLOAD PROGRAM TO PLC-5(对PLC-5上下载程序)F7 PROGRAM COMPARE UTILITY(程序比较)
F8 PID TUNER AND UTILITIES(PID调节器及效用)
F9 CONFIGURE PROGRAM PARAMETERS(配置程序参数)
3.选择F1,从笔记本屏幕上选择所需选择程序的名称:
4157FAWA.X5:转毂程序。
4156FAWA.X5:前轮程序。
4.选择
F2:对程序进行离线查看。
F3:对程序进行在线查看。
5.如进行程序传输,选择F6,出现如下菜单:
F1 DOWNLOAD PROGRAM TO PLC-5(把程序下载到PLC5)
F2 UPLOAD PROGRAM FROM PLC-5(从PLC5上载程序)
F3 BATCH DOWNLOAD TO PLC-5(批下载到PLC5)
F4 WHO ACTIVE(激活)
F5 PARTIAL DOWNLOAD UTILITY(部分下载)
选择F1可将程序传入PLC,选择F2可将程序从PLC传入笔记本电脑。
八.结语
四轮定位是整车检测线中一台举足轻重的设备,要有效控制整车
质量,对它的研究和解析是有意义的。以上分析可能还有些肤浅,但它是我们对设备技术不断学习和把握的一个过程。
事实上,对这类设备,从控制系统硬件和软件上做过细的探讨,跟探讨工艺实现过程的相关设备因素相比,后者反而更加重要。毕竟我们不是在做设备开发工作,因此,我们没有对硬件和软件因素做太多的分析,这属于计算机技术和测量技术基础专业理论的范畴;况且,我们也不可能充分了解厂家硬件和软件开发的细节。
虽仅如此,我们还是希望先哲和同行们,就相关测试工艺问题和设备问题,给予无私的斧正和指点,以期改善我们的工作。
站长 2004-1-15
三河县某中学教学楼 岩土工程勘察报告 1、前言 1.1 工程概况 国盛房地产开发有限公司(甲方)拟在三河县某中学兴建教学楼。该项目由廊坊市××建筑设计院设计,委托我院对其进行岩土工程详细勘察工作。拟建工程由主楼组成。 根据国标《岩土工程勘察规范》(GB 50021-2001)、《建筑地基基础设计规范》(GB 50007-2002),岩土工程重要性等级为二级,场地等级为二级,地基等级为二级,岩土工程勘察等级为乙级,地基基础设计等级为乙级。 1.2 勘察目的及要求 根据设计单位提出的“岩土工程勘察委托书”,本次勘察目的及要求如下:1、查明场地和地基的稳定性、地层结构、持力层和下卧层的工程特性、土的应力历史和地下水条件以及不良地质作用等。 2、提供满足设计、施工所需的岩土参数,确定地基承载力,预测地基变形性状。 3、提出地基基础、基槽支护、工程降水和地基处理设计与施工方案的建议。 4、提出对建筑物有影响的不良地质作用的防治方案建议。 5、对于抗震设计防烈度等于或大于6度的场地,进行场地与地基的地震效应评价。 6、查明建筑范围内岩土层的类型、深度、分布、工程特性,分析和评价地基的稳定性、均匀性和承载力。 7、对需进行沉降计算的建筑物,提供地基变形计算参数,预测建筑物的变性特征。 8、查明埋藏的河道、沟浜、墓穴、防空洞、孤石等对工程不利的埋藏物。 9、判定水对建筑材料的腐蚀性。
10、钻孔布置原则上沿建筑物周边和建筑物主要控制线布置,最大孔距≤24米,当相邻两孔所揭露的持力层层面高差大于2米或土层性质变化较大,或存在较多孤石分布的情况时,应及时与设计院联系,共商是否适当加密勘查点示意。 11、在本工程部位应提出抗浮设计水位。 12、勘查报告应交由勘察审查所审查。 1.3 勘察依据 设计单位提出的“勘探点布置图”及“岩土工程勘察委托书”; 《岩土工程勘察规范》(GB 50021-2001); 《建筑抗震设计规范》(GB 50011-2001); 《建筑地基基础设计规范》(GB 50007-2002); 《建筑基槽技术规程》(JGJ120-99); 《土工试验方法标准》(GBT/50123-1999); 1.4 勘察工作量布置及完成情况 本次岩土工程勘察工作量是根据建设方及设计单位提供的“总平面规划图”、“岩土工程勘察委托书”,结合拟建建筑物规模及对场地岩土勘察的初步分析,参照现行规程、规范及邻近场地地质资料确定。 本次勘察按桩基勘察进行,勘探点按拟建物轮廓线及角点共布置钻孔10个(编号ZK1~ZK10),沿边线外10m处布置基槽钻孔12个(编号JK1~JK12),钻孔勘探点间距10~20m,勘探孔深39.0~41.0m(一般性钻孔进入强风化岩不小于10m,控制性钻孔进入中风化岩1~2m);基槽孔勘探点间距10~20m,勘探孔深大于20m,勘探深度均满足规范要求。 我院于2011年3月23日进场施工,至4月9日完成外业工作;在钻探过程中发现局部地段可作为桩基持力层的强风化砂岩的层面起伏较大(层面坡度>10%),
目录 1、前言 2、场地工程地质条件 3、场地和地基地震效应分析评价 4、岩土工程分析及评价 5、地基基础方案分析与建议 6、地基变形特征及沉降变形预测 7、结论与建议 附图目录(附报告后)顺序号图号图名 1 1-1 勘探点平面位置图 2 2-1~2-2 3 工程地质剖面图 附表目录(附报告后)附表1:勘探点主要数据一览表 附表2:标贯试验成果表 附表3:重型动力触探试验成果表 附表4:地基土物理力学指标数理统计表 附表5:土工试验成果总表 附表6:水质分析报告表 附表7:土层固结压缩试验曲线 附表8:岩石抗压测试报告 附表9:抽水工艺综合柱状图 附件目录(附报告后)附件1:地基土剪切波速、地脉动测试报告 附件2:工程勘察任务委托书
1.前言 受平和中坊置业有限公司的委托,我公司承担了平和县锦锈柚都一期场地岩土工程一次性详细勘察任务。 1.1工程概况 拟建场地总用地面积为31827.85m2,总建筑面积为98981.60m2,建筑占地面积约为10030.40m2。拟建场地位于平和县城关,玉溪路东南侧。场地内已填土整平,地形较平缓,钻孔孔口高程为31.75~33.32米(黄海高程)。拟建锦锈柚都一期1#、7#、8#、9#住宅楼为高层建筑,拟建物对工程差异沉降敏感程度为敏感,建筑整体倾斜要求为0.003,平均沉降量200mm,基础埋置深度为设计标高以下5.00m,2~6#、10#住宅楼、超市、店铺、幼儿园为多层建筑,底层为1层超市、店铺相连,对工程差异沉降敏感程度为敏感,基础埋置深度为设计标高以下2.00m,地基变形允许值整体倾斜为0.004,相邻柱基的沉降差为0.002L。7#、8#、9#住宅楼、10#商住楼、幼儿园范围设一层地下室,地下室埋深为-4.50m,地下室面积为7696.00m2。2~6#、10#住宅楼、超市、店铺、幼儿园地基基础设计等级为丙级;1#、7#、8#、9#住宅楼地基基础设计等级为乙级。该项目由厦门市住宅设计院有限公司设计。拟建物特性具体情况见表1: 1.2 勘察目的与技术要求 本次勘察为一次性详勘,勘察目的是为地基基础设计提供岩土资料及相关技术参数。委托单位对本次勘察提出了具体的勘察技术要求如下: a、详细查明建筑物范围内的地层结构及均匀性,提供岩土物理力学性能指标、
结构动力特性的测试方法及应用(讲稿) 一. 概述 每个结构都有自己的动力特性,惯称自振特性。了解结构的动力特性是进行结构抗震设 计和结构损伤检测的重要步骤。目前,在结构地震反应分析中,广泛采用振型叠加原理的反 应谱分析方法,但需要以确定结构的动力特性为前提。n 个自由度的结构体系的振动方程如 下: [][][]{}{})()()()(...t p t y K t y C t y M =+? ?????+?????? 式中[]M 、[]C 、[]K 分别为结构的总体质量矩阵、阻尼矩阵、刚度矩阵,均为n 维矩阵; {})(t p 为外部作用力的n 维随机过程列阵;{})(t y 为位移响应的n 维随机过程列阵;{} )(t y &为速度响应的n 维随机过程列阵;{})(t y && 为加速度响应的n 维随机过程列阵。 表征结构动力特性的主要参数是结构的自振频率f (其倒数即自振周期T )、振型Y(i)和 阻尼比ξ,这些数值在结构动力计算中经常用到。 任何结构都可看作是由刚度、质量、阻尼矩阵(统称结构参数)构成的动力学系统, 结构一旦出现破损,结构参数也随之变化,从而导致系统频响函数和模态参数的改变,这种 改变可视为结构破损发生的标志。这样,可利用结构破损前后的测试动态数据来诊断结构的破损,进而提出修复方案,现代发展起来的“结构破损诊断”技术就是这样一种方法。其最 大优点是将导致结构振动的外界因素作为激励源,诊断过程不影响结构的正常使用,能方便 地完成结构破损的在线监测与诊断。从传感器测试设备到相应的信号处理软件,振动模态测 量方法已有几十年发展历史,积累了丰富的经验,振动模态测量在桥梁损伤检测领域的发展 也很快。随着动态测试、信号处理、计算机辅助试验技术的提高,结构的振动信息可以在桥 梁运营过程中利用环境激振来监测,并可得到比较精确的结构动态特性(如频响函数、模态 参数等)。目前,许多国家在一些已建和在建桥梁上进行该方面有益的尝试。 测量结构物自振特性的方法很多,目前主要有稳态正弦激振法、传递函数法、脉动测试 法和自由振动法。稳态正弦激振法是给结构以一定的稳态正弦激励力,通过频率扫描的办法 确定各共振频率下结构的振型和对应的阻尼比。 传递函数法是用各种不同的方法对结构进 行激励(如正弦激励、脉冲激励或随机激励等),测出激励力和各点的响应,利用专用的分 析设备求出各响应点与激励点之间的传递函数,进而可以得出结构的各阶模态参数(包括振 型、频率、阻尼比)。脉动测试法是利用结构物(尤其是高柔性结构)在自然环境振源(如 风、行车、水流、地脉动等)的影响下,所产生的随机振动,通过传感器记录、经谱分析, 求得结构物的动力特性参数。自由振动法是:通过外力使被测结构沿某个主轴方向产生一定 的初位移后突然释放,使之产生一个初速度,以激发起被测结构的自由振动。 以上几种方法各有其优点和局限性。利用共振法可以获得结构比较精确的自振频率和阻 尼比,但其缺点是,采用单点激振时只能求得低阶振型时的自振特性,而采用多点激振需较 多的设备和较高的试验技术;传递函数法应用于模型试验,常常可以得到满意的结果,但对 于尺度很大的实际结构要用较大的激励力才能使结构振动起来,从而获得比较满意的传递函 数,这在实际测试工作中往往有一定的困难。 利用环境随机振动作为结构物激振的振源,来测定并分析结构物固有特性的方法,是近 年来随着计算机技术及FFT 理论的普及而发展起来的,现已被广泛应用于建筑物的动力分 析研究中,对于斜拉桥及悬索桥等大型柔性结构的动力分析也得到了广泛的运用。斜拉桥或 悬索桥的环境随机振源来自两方面:一方面指从基础部分传到结构的地面振动及由于大气变 化而影响到上部结构的振动(根据动力量测结果,可发现其频谱是相当丰富的,具有不同的
激光原理及应用 考试时间:第 18 周星期五 ( 2007年1 月 5日) 一单项选择(30分) 1.自发辐射爱因斯坦系数与激发态E2平均寿命τ的关系为( B ) 2.爱因斯坦系数A21和B21之间的关系为(C ) 3.自然增宽谱线为( C ) (A)高斯线型(B)抛物线型(C)洛仑兹线型(D)双曲线型 4.对称共焦腔在稳定图上的坐标为(B ) (A)(-1,-1)(B)(0,0)(C)(1,1)(D)(0,1) 5.阈值条件是形成激光的( C ) (A)充分条件(B)必要条件(C)充分必要条件(D)不确定 6.谐振腔的纵模间隔为(B ) 7.对称共焦腔基模的远场发散角为(C ) 8.谐振腔的品质因数Q衡量腔的(C ) (A)质量优劣(B)稳定性(C)储存信号的能力(D)抗干扰性 9.锁模激光器通常可获得( A )量级短脉冲 10.YAG激光器是典型的( C )系统 (A)二能级(B)三能级(C)四能级(D)多能级 二填空(20分) 1.任何一个共焦腔与等价,
而任何一个满足稳定条件的球面腔地等价于一个共焦腔。(4分) 2 .光子简并度指光子处于、 、、。(4分)3.激光器的基本结构包括三部分,即、 和。(3分) 4.影响腔内电磁场能量分布的因素有、 、。(3分) 5.有一个谐振腔,腔长L=1m,在1500MHz的范围内所包含的纵模个数为 个。(2分) 6.目前世界上激光器有数百种之多,如果按其工作物质的不同来划分,则可分为四大类,它们分别是、、和。(4分) 三、计算题(42分) 1.(8分)求He-Ne激光的阈值反转粒子数密度。已知=6328?,1/f( ) =109Hz,=1,设总损耗率为,相当于每一反射镜的等效反射率R=l-L =98.33%,=10—7s,腔长L=0.1m。 2.(12分)稳定双凹球面腔腔长L=1m,两个反射镜的曲率半径大小分别为R 1=3m求它的等价共焦腔腔长,并画出它的位置。 =1.5m,R 2 3.(12分)从镜面上的光斑大小来分析,当它超过镜子的线度时,这样的横模就不可能存在。试估算在L=30cm, 2a=0.2cm 的He-Ne激光方形镜共焦腔中所可能出现的最高阶横模的阶次是多大? 4.4.(10分)某高斯光束的腰斑半径光波长。求与腰斑相距z=30cm处的光斑及等相位面曲率半径。 四、论述题(8分) 1.(8分)试画图并文字叙述模式竞争过程
前言 工程抗震设计是地震区建筑物设计中的重要内容,通常除了测试场地土剪切波速,进行场地土类型划分、场地类别划分、场地地震反应分析外,测试场地脉动卓越周期也是一项重要工作。场地脉动卓越周期的测试除了防止特殊的地震效应发生,避免拟建建筑物自振周期与场地脉动卓越周期一致或接近,在地震发生时,地基与建筑物产生共振或类共振;还可依据场地脉动卓越周期作为工程抗震中场地土类型划分、场地类别划分的标准,以及估算地震动峰值加速度。 因此, 从地脉动出发研究地基土层构造与地脉动卓越周期的关系以及不同场地类别的卓越周期特征, 以便对地基土层场地准确评价,以及有针对性地选用基础结构与埋深等方面都具有重要的理论及现实意义。 1 地脉动简介 在一般情况下,任何时刻在地球表面的任何地点,都可以用高灵敏度的仪器观测到非地震引起的一种振幅很小的微弱震动噪声,其位移一般只有几微米到几十微米,把这种人体难以察觉到的微小振动称为地脉动。 地脉动是由场地周围自然震源(风、海浪等) 和人工震源(机器振动源、交通工具等) 所产生, 是地面的一种稳定的非重复性随机波动。通常情况下地脉动具有频率低、振幅小等特点。 从地震观测的角度,按周期长短把地脉动分为两类:一是短周期地脉动;二是长周期地脉动,长短周期地脉动有如下区别: (1) 常时微动。为短周期地微动,一般为0. 1~1 s ,波长较短,是地微动信号中反映场地土动态特性的成分,主要是近距离的人类活动、交通运输、机械振动等人工振动源引起的。在理论上可用横波在土层中的多层反射理论解释。 (2) 脉动。为中长周期地微动,一般为1 s至几十秒,波长较长,是地微动中反映振源特性的分量,主要是由海浪、风雨、气候、雷电、火山、地震等自然现象变化引起的,由较远距离的振源或海洋波浪、大气环流及地球深部构造运动激发,可利用它研究地震、台风、火山及地球内部的其它运动,理论上可用面波传播特征解释。相对于常时微动而言,是一短期内的振动现象,故称之为“脉动”。
激光原理及应用[陈家璧主编] 一、填空题(20分,每空1分) 1、爱因斯坦提出的辐射场与物质原子相互作用主要有三个过程,分别是(自发辐射)、(受激吸收)、(受激辐射)。 2、光腔的损耗主要有(几何偏折损耗)、(衍射损耗)、(腔镜反射不完全引起的损耗)和材料中的非激活吸收、散射、插入物损耗。 3、激光中谐振腔的作用是(模式选择)和(提供轴向光波模的反馈)。 4、激光腔的衍射作用是形成自再现模的重要原因,衍射损耗与菲涅耳数有关,菲涅耳数的近似表达式为(错误!未找到引用源。),其值越大,则衍射损耗(愈小)。 5、光束衍射倍率因子文字表达式为(错误!未找到引用源。)。 6、谱线加宽中的非均匀加宽包括(多普勒加宽),(晶格缺陷加宽)两种加宽。 7、CO2激光器中,含有氮气和氦气,氮气的作用是(提高激光上能级的激励效率),氦气的作用是(有助于激光下能级的抽空)。 8、有源腔中,由于增益介质的色散,使纵横频率比无源腔频率纵模频率更靠近中心频率,这种现象叫做(频率牵引)。 9、激光的线宽极限是由于(自发辐射)的存在而产生的,因而无法消除。 10、锁模技术是为了得到更窄的脉冲,脉冲宽度可达(错误!未找到引用源。)S,通常有(主动锁模)、(被动锁模)两种锁模方式。 二、简答题(四题共20分,每题5分) 1、什么是自再现?什么是自再现模? 开腔镜面上的经一次往返能再现的稳态场分布称为开腔的自在现摸 2、高斯光束的聚焦和准直,是实际应用中经常使用的技术手段,在聚焦透镜焦距F一定的条件下,画出像方束腰半径随物距变化图,并根据图示简单说明。 3、烧孔是激光原理中的一个重要概念,请说明什么是空间烧孔?什么是反转粒子束烧孔? 4、固体激光器种类繁多,请简单介绍2种常见的激光器(激励方式、工作物质、能级特点、可输出光波波长、实际输出光波长)。 三、推导、证明题(四题共40分,每题10分)
**商厦 地基土剪切波速、地脉动测试报告 **勘察院有限公司 2007年5月
**广场 地基土剪切波速、地脉动测试报告 测试: 编写: 审核: **勘察院有限公司 2007年5月
一、概况 受业主的委托, 我院承担了**商厦的勘察钻孔的波速测试和地脉动测试工作。本次测试工作的目的是对拟建建筑场地进行场地土类型和场地类别的评判,并测试场地的卓越周期和振动幅值。测试工作依据《建筑抗震设计规范》(GB50011-2001)及《地基动力特性测试规范》(GB/T50269-97)中的有关规定进行。 我院分别对场地内的zk1#、zk8#钻孔采用单孔检层法进行剪切波波速测试,并在zk8#钻孔附近进行了地脉动测试。 二、仪器设备及测试方法 仪器设备:XG—I型多功能测试仪,仪器主要技术指标如下: 动态范围:96dB; 前放增益:18-60dB(8-1000倍); 道一致性:≤0.1ms; 通道数:1至3道可选; 采样间隔:0.02—4ms可调; 记录长度:512—16k可调; 剪切波测试方法:在距孔口约1.5m处放一块振板,上压大于400Kg重物,振板上安置检波器,检波器与XG—I测井仪触发孔连接,将探头放入孔中预定深度,用大于8磅大锤水平敲击振板,产生P、S波沿地层向下传播,由孔中的检波器接收沿井壁传播的P、S波振动信号并把P、S波的振动信号转换成电信号,通过电缆由主机记录显示存储。对信号进行数据处理后,计算P、S波传播速度。测试顺序自下而上逐点进行,测点深度基本间隔1.0m。
三、土层波速测试成果 经现场波速测试,场地内钻孔各测点的剪切波波速成果图见附图1-1~1-2。 四、建筑场地类别评判 1、土层的等效剪切波速计算 根据《建筑抗震设计规范》(GB50011-2001),建筑场地覆盖层厚度的确定,应符合下列要求: a 一般情况下,应按地面至剪切波速大于500m/s的土层顶面的距离确定。 b 当地面5m以下存在剪切波速大于相邻上层土剪切波速2.5倍的土层,且其下卧岩土的剪切波速均不小于400m/s时,可按地面到该土层顶面的距离确定。 c 剪切波速大于500m/s的孤石、透镜体,应视同周围土层。 d 土层中的火山硬夹层,应视为刚体,其厚度应从覆盖土层中扣除。 等效剪切波速V Se按下列公式计算:V Se=d0/t, n t= ∑(d i/V si), i=1 d0 ---计算深度(m),取覆盖层厚度和20m二者的较小值; t----剪切波在地面到计算深度之间的传播时间 d i ---计算深度内第I土层的厚度 V si---计算深度范围内第I土层的剪切波速(m/s)
武汉建科科技有限公司WA VE2000场地振动测试仪 (以下内容可根据实际情况进行增加,正式报告中须去掉本规定格式中的注释红字)建筑场地剪切波速及地脉动 测试报告 工程名称: 工程地点: 委托单位: 检测日期: 报告编号: ※省※研究院 ※年※月※日
※工程 单孔波速法地脉动测试报告测试人员: 负责人: 报告编写: 校核: 审核: 审定: ※省※研究院 (盖章) ※年※月※日
一、前言 受※的委托,※省※院于※年※月※日对※工程拟建场地进行单孔波速法、地脉动测试。该场地位于※路※号,根据场地条件及《建筑抗震设计规范》(GB50011-2001)等有关规定,本场地共完成K16#、K37#、K69#、K75#、K82#、K96#六个孔剪切波速及场地脉动测试工作。测试的目的是对拟建建筑场地土的类型及建筑场地类别进行划分,以确定建筑抗震有利、不利和危险地段。 本项目工作技术要求: 1、 测定场地20米以内的等效剪切波速; 2、 测定场地地脉动; 3、 确定场地土类型及建筑场地类别。 二、检测设备、基本原理 1、检测设备 检测设备采用武汉建科科技有限公司制造的W A VE2000场地振动测试仪,检测设备及现场联接见图1。 1-场地振动测试仪 2-重物 3-木板 4-外触发传感器 5-三分量探头 6-探头信号传输线 7-外触发传感器信号线 8-钢丝绳(或尼龙绳) 图1 单孔波速测试示意图 2、剪切波速及地脉动测试基本原理 单孔剪切波速法(检层法)测试基本原理: 用木锤或适宜的铁锤分别水平敲击水平放置孔口的木板两端,地表产生的剪切波经地层传播,由孔内三分量检波器的水平向检波器接收SH 波信号,然后读取正、反两方向的实测波形,找出波形交叉点,读取初至波传播时间,进而计算出各测点(层)剪切波速值及其它相关参数。 地脉动测试原理: 地脉动测试时应选择外界环境干扰极小的深夜进行。测试时将地脉动拾振器放置于平整场地地表土上,一般按东西向EW 、南北向SN 、垂直向VR 三个方向放置。测试时由三分量拾振器分别接收三个方向的脉动信号,信号再通过放大,采集仪记录,即可在时域曲线上分析信号幅值大小,从频率域曲线上分析其频率组成并确定场地卓越周期值。 土层的等效剪切波速,按下列公式计算: ∑=÷=÷=n i si i sc v d t t d v 10) (
〈三〉地震效应分析 根据《建筑抗震设计规范》(GB50011-2001)的划分,并结合波速及地脉动测试报告可知:场地位于基本烈度Ⅶ度区,建筑物应按相应地震烈度进行抗震设防。设计基本地震加速度值为0.10g ,卓越周期变化范围为0.02s ~0.21s ,场地土类型整体为中硬土,局部区域为中软土,建筑场地类别为Ⅱ类,属于抗震不利地段。 〈四〉场地砂土液化判别 拟建场地位于基本烈度Ⅶ度区,依据《建筑抗震设计规范》(GB50011-2001)规范要求,须对场地内存在的饱和砂土进行液化判别。 根据勘察成果,场地地基土中2-3层为第四系冲洪积含粘性土中粗砂层,松散~稍密状,顶板埋深0.00~3.90m ,局部区域位于地下水位以上,未达饱和状态;按Ⅶ度区计算,该层大部份粘土含量达15%左右,故初步判别为不液化地层。 依据《建筑抗震设计规范》(GB50011-2001)规范要求,对位于地下水位以下呈饱和状态的砂土,结合标贯击数判别该层是否发生液化,对于可液化砂土层,再进一步计算液化指数,依据液化等级确定地基可能遭受的地质灾害危险性级别。 砂土液化判别公式如下: ()[]ρ o w s o cr d d N N 3 1.09.0-+= (适用于地面以下15m 以 内) [] ρ o s o cr d N N 3 1.04.2-= (适用于地面以下15~20m 以 内) 式中: d s —饱和土标准贯入点深度(m ); d w —地下水位深度(m ) ρo —粘粒含量百分率,小于3或为砂土时,取3。 N cr —饱和土液化临界标准贯入锤击数;
N o —饱和土液化判别的基准标准贯入锤击数。 对于可液化土层,按下式计算的液化指数(I ie )来确定液化等级; w d N N I i i n i cri i ie ) 1(1 ∑=- = 式中: I ie :液化指数; N i :饱和土层中i 点的实测标准贯入锤击数; N cri :相应于Ni 深度处的临界标准贯入锤击数; n :每个钻孔内15m 深度范围内饱和土层中标准贯入点总数; 并按表4的标准进行砂土液化等级划分。 表4 砂土液化等级分级标准 表 5)。冲洪积含粘性土中粗砂层(层序号2-3)液化指数I lE 为<0,均为无液化土层。因此综合判定本场地无可液化地层分布。
一、安全规定: 1、岩海产品绝大部分以直流供电为主,交流供电为辅,在接通交流市电使 用本产品之前,请将机壳接地端接地; 2、本公司产品应在规定的电压范围内使用,市电 AC220V±10%(个别 AC380V ±10%)、直流电 DC12V±5%(部分仪器 DC6V±5%),否则极易引起仪器故障; 3、工程测试,测试者应注意仪器及其附属物坠落伤人,或摔坏仪器;相 关 人员还应注意自身安全,进入工程现场应配戴安全帽及其它防护用品。特别提示: 本系统光电耦合旋钮和四热键可组成两套独立的指令输入系统互为替代 使用,也可灵活交叉使用,其中后一种方式能使阁下的操作更为快捷。 一、仪器面板说明 1、动测仪左侧面(图1-1) 图1-1 动测仪左侧面 * VEL:反射波法速度计接口; * ACC:反射波法加速度计接口。 2、动测仪右侧面(图1-2)
图1-2 动测仪右侧面 * DC IN:直流稳压电源输入接口; * ON-OFF:动测仪电源开关。 3、前面板(图1-3) 图1-3 动测仪前面板 * 电源能量指示光柱:用于动测仪供电电压(+12V)的能量指示。当能量指示光 柱只剩下最左边一格点亮时,表示动测仪内部的电池能量 即将用完,需要立即充电。 * 光电式旋转键盘开关:此开关可左旋、右旋和压下(立刻释放) 三种操作。类似 于计算机中的鼠标,借助于中文提示菜单,此旋转开关可 完成全部功能操作。 * 功能键:功能键有四个:F1、F2、F3和F4,其功能定义如 下: F1:光标左移;
F3:光标右移; F2:进入主菜单或确认当前操作; F4:进入磁盘操作或取消当前操作,四个功能键可以全部取代 光电式旋转开关的功能。 4、后面板(图1-4) * POWER:机内电池/外接电源切换开关;INSIDE表示使用机 内电池,OUTSIDE 表示使用外接电源。 * CHARGE:机内电池充电控制开关;充电时置为ON,不充电时置为OFF。 * PRINTER:打印机接口,并行通讯口。 * RS-232:串行通讯口。 * RS MODE:高应变RS模式接口。 * PDA MODE:高应变PDA模式接口(选配件)。 * EXT:外触发输入端子。 * :仪器接地端子。 图1-4 动测仪后面板 5、19芯短电缆 19芯短电缆是用来做其他工程物探使用的,譬如:剪切波、瑞利波、地脉动,也可以用 作多通道基桩低应变测量。 短电缆的一端为19芯孔式圆形插座,可与仪器后面板上的“RSMODE”高应变电缆插 座相连接;另一端有7个Q9插头,分别标注有A1、A2、A3、A4、E1、E2、E3字样。其中 A1~A4为低增益通道,可作为4通道基桩低应变测量使用,此时在“测量类型选择菜单”
思考练习题1 1.答:粒子数分别为:188346 341105138.210 31063.6105.01063.61?=????=? ?==---λ ν c h q n 239342100277.510 31063.61?=???== -νh q n 2. 答:(1)(//m n E E m m kT n n n g e n g --=) 则有:1]300 1038.11031063.6exp[23 93412≈?????-==---kT h e n n ν (2)K T T e n n kT h 3 6 23834121026.61.0]1011038.11031063.6exp[?=?=???????-==----ν 3. 答:(1)1923 18 1221121011.3]2700 1038.11064.1exp[4----?=???-?=?=??n n e g n g n kT h ν 且202110=+n n 可求出312≈n (2)功率=W 918810084.51064.13110--?=??? 4.答:(1) 3 1734 3 6333/10857.310 63.68)106.0(2000188m s J h h c q q ??=????=?=---ννννρρπρπλρνπ=自激 (2)9434 36333106.71051063.68)106328.0(88?=?????==---πρπλρνπννh h c q q =自激 5. 答:(1)最大能量 J c h d r h N W 3.210 6943.01031063.61010208.0004.06 83461822=??????????=? ???=?=--πλ ρπν 脉冲平均功率=瓦8 9 61030.210 10103.2?=??=--t W (2)瓦自 自自145113.211200 2021=?? ? ??-?==? ? ? ??-==?-e h N P e n dt e n N t A τνττ
结构动力特性的测试方法及应用(讲稿) 一. 概述 每个结构都有自己的动力特性,惯称自振特性。了解结构的动力特性就是进行结构抗震设 计与结构损伤检测的重要步骤。目前,在结构地震反应分析中,广泛采用振型叠加原理的反应谱分析方法,但需要以确定结构的动力特性为前提。n 个自由度的结构体系的振动方程如下: [][][]{}{})()()()(...t p t y K t y C t y M =+??????+?????? 式中[]M 、[]C 、[]K 分别为结构的总体质量矩阵、阻尼矩阵、刚度矩阵,均为n 维矩阵;{} )(t p 为外部作用力的n 维随机过程列阵;{})(t y 为位移响应的n 维随机过程列阵;{})(t y &为速度响应的n 维随机过程列阵;{})(t y && 为加速度响应的n 维随机过程列阵。 表征结构动力特性的主要参数就是结构的自振频率f (其倒数即自振周期T )、振型Y(i)与阻尼比ξ,这些数值在结构动力计算中经常用到。 任何结构都可瞧作就是由刚度、质量、阻尼矩阵(统称结构参数)构成的动力学系统,结构一旦出现破损,结构参数也随之变化,从而导致系统频响函数与模态参数的改变,这种改变可视为结构破损发生的标志。这样,可利用结构破损前后的测试动态数据来诊断结构的破损,进而提出修复方案,现代发展起来的“结构破损诊断”技术就就是这样一种方法。其最大优点就是将导致结构振动的外界因素作为激励源,诊断过程不影响结构的正常使用,能方便地完成结构破损的在线监测与诊断。从传感器测试设备到相应的信号处理软件,振动模态测量方法已有几十年发展历史,积累了丰富的经验,振动模态测量在桥梁损伤检测领域的发展也很快。随着动态测试、信号处理、计算机辅助试验技术的提高,结构的振动信息可以在桥梁运营过程中利用环境激振来监测,并可得到比较精确的结构动态特性(如频响函数、模态参数等)。目前,许多国家在一些已建与在建桥梁上进行该方面有益的尝试。 测量结构物自振特性的方法很多,目前主要有稳态正弦激振法、传递函数法、脉动测试法与自由振动法。稳态正弦激振法就是给结构以一定的稳态正弦激励力,通过频率扫描的办法确定各共振频率下结构的振型与对应的阻尼比。 传递函数法就是用各种不同的方法对结构进行激励(如正弦激励、脉冲激励或随机激励等),测出激励力与各点的响应,利用专用的分析设备求出各响应点与激励点之间的传递函数,进而可以得出结构的各阶模态参数(包括振型、频率、阻尼比)。脉动测试法就是利用结构物(尤其就是高柔性结构)在自然环境振源(如风、行车、水流、地脉动等)的影响下,所产生的随机振动,通过传感器记录、经谱分析,求得结构物的动力特性参数。自由振动法就是:通过外力使被测结构沿某个主轴方向产生一定的初位移后突然释放,使之产生一个初速度,以激发起被测结构的自由振动。 以上几种方法各有其优点与局限性。利用共振法可以获得结构比较精确的自振频率与阻尼比,但其缺点就是,采用单点激振时只能求得低阶振型时的自振特性,而采用多点激振需较多的设备与较高的试验技术;传递函数法应用于模型试验,常常可以得到满意的结果,但对于尺度很大的实际结构要用较大的激励力才能使结构振动起来,从而获得比较满意的传递函数,这在实际测试工作中往往有一定的困难。 利用环境随机振动作为结构物激振的振源,来测定并分析结构物固有特性的方法,就是近年来随着计算机技术及FFT 理论的普及而发展起来的,现已被广泛应用于建筑物的动力分析研究中,对于斜拉桥及悬索桥等大型柔性结构的动力分析也得到了广泛的运用。斜拉桥或悬索桥的环境随机振源来自两方面:一方面指从基础部分传到结构的地面振动及由于大气变化而影响到上部结构的振动(根据动力量测结果,可发现其频谱就是相当丰富的,具有不同的脉动卓越周期,反应了不同地区地质土壤的动力特性);另一方面主要来自过桥车辆的随机振动。
一般规定 本章适用于周期在0.1~1.0s,振幅小于3μm的地脉动测试,为工程抗震和隔振设计提供场地的卓越周期和脉动幅值。 测试结果应包括下列内容: (1)测试资料的数据处理方法及分析结果; (2)脉动时程曲线; (3)富氏谱或功率谱图; (4)测试成果表。 设备和仪器 1、地脉动测试系统应符合下列要求: (1)通频带应选择为1 ~40HZ,信噪比应大于80dB; (2)低频特性应稳定可靠,系统放大倍数不应小于106; (3)测试系统应与数据采集分析系统相配接。 2、传感器除应符合本规范第4.2.3条外,也可采用频率特性和灵敏度等满足测试要求的加速度型传感器;对地下脉动测试用的速度型传感器、通频带应为1~25HZ,并应严格密封防水。 3、放大器应符合下列要求: (1)当采用速度型传感器时,放大器应符合本规范第4.2.4条的要求; (2)当采用加速度型传感器时,应采用读通道适调放大器。 4、信号采集与分析系统宜采用多通道,模数转换器(A/D)位 数不宜小于12位;曲线和图形显示不宜低于图像清晰度指标(VGA),并应具有抗混淆滤波功能,低通滤波宜为80dB/oct,计算机内存不应小于4.0MB,并应具有加窗功能和时域、频域分析软件。 5、测试仪器应每年在标准振台上进行系统灵敏度系数的标定,以确定灵敏度系数随频率变化的曲线。 测试方法 1、每个建筑场地的地脉动测点,不应少于2个;也可根据工程需要,增加测点数量。
2、当记录脉动信号时,在距离观测点100m范围内,应无人为振动干扰。 3、测点宜选在天然土地基上及波速测试孔附近,传感器应沿东西、南北、竖向三个方向布置。 4、地下脉动测试时,测点深度应根据工程需要进行布置。 5、脉动信号记录时,应根据所需频率范围设置低通道滤波频率和采样频率,采样频率宜取50 ~100HZ,每次记录时间不应少于15min,记录次数不得少于2次。 数据处理,宜作富氏谱或功率谱分析;每个样本数据宜采用1024个点;采样间隔宜取0.01~0.02s,并应按下列公式计算: 式中T——场地卓越周期(s); ?——卓越频率(HZ)。 3、卓越频率应按下列规定确定: (1)按谱图中最大峰值所对应的频率确定; (2)当谱图中出现多峰的峰值相差不大时,可在谱分析的同时,进行相关或互谱分析,以便对场地脉动卓越频率进行综合评价。 4、脉动幅值的确定应符合下列规定: (1)脉动幅值应取实测脉动信号的最大幅值; (2)确定脉动信号的幅值时,应排除人为干扰信号的影响。
中芯国际 岩土工程初步勘察方案 武汉中科岩土工程有限责任公司 2013年9月5日
目录 ●目录 1.前言 2场地工程地质条件简述 3.勘察工作量的布置 4.岩土勘察报告书的编写 5.施工组织安排及进度计划 6.质量保证措施 7.安全保证体系 8.服务措施 ●附件部分 勘探点平面布置图
1.前言 1.1工程概况 1.1.1略 1.2勘察目的和要求 1.2.1初步勘察目的 对场地内建筑地段的稳定性和建设的适宜性作出评价,提出设计、施工 所需参数,为确定主要建筑物地基基础方案及不良地质现象的防治工程 方案提供工程地质资料。 1.2.2要求 (1)、合理布置钻孔位置,对地层分布不均的场地应适当增加钻孔数量,勘察孔距30~50米为宜; (2)、初步查明场地不良地质作用类型、成因、分布范围、发展趋势和危害程度;(3)、初步查明场区范围内岩土层的类型、深度、分布、工程特性变化规律,分析和评价地基的稳定性,均匀性和承载力; (4)、工程抗震设防烈度大于等于6度时,应对场地和地基的地震效应做出初步评价; (5)、查明地下水埋藏条件,初步判定地下水对建筑材料的腐蚀性; (6)、高层建筑初步勘察,应对可能的地基基础类型、基坑支护形式、降水方案进行初步的分析评价。 1.3方案编制依据 1.3.1《岩土工程勘察规范》(GB50021-2001)(2009年版); 1.3.2《建筑地基基础设计规范》(GB50007-2002); 1.3.3《建筑抗震设计规范》(GB50011-2001); 1.3.4《岩土工程勘察规程》(DB42/169—2003); 1.3.5《建筑地基基础技术规范(DB42/242-2003); 1.3.6《土工试验方法标准》(GB/T50123-1999);
内蒙古工业大学200 —200 学年第一学期 《激光原理及应用》期末(考试)试卷(A)课程代码: 试卷审核人:考试时间: 注意事项:1.本试卷适用于级电科专业本科生使用 2.本试卷共6页,满分100分,答题时间120分钟 一、选择题(30分) 1、平面波的单色性是由下面的那个参数来评价其优劣的() A、振幅 B、频率 C、光强 D、先谱的线宽 2、激光束偏转技术是激光应用的基本技术,如果它使激光束离散地投 射到空间中某些特定的位置上,则主要应用于()。 A.激光打印B.激光显示 C.激光存储D.传真 3、具有超小型、激光强度快速可调特点的激光器是()。 A.固体激光器B.气体激光器 C.半导体激光器D.光纤激光器 4、LED不具有的特点是()。 A.辐射光为相干光 B.LED的发光颜色非常丰富 C.LED的单元体积小 D.寿命长,基本上不需要维修 9、高斯光束波阵面的曲率半径R0=()
A 、])(1[||2 2 O Z Z πωλ+ B 、21 220 0])(1[(πωλωZ + C 、])(1[||22Z Z O λπω+ D 、21 )(λ λL 10、输出功率的兰姆凹陷常被用作一种,()的方法。 A 、稳定输出功率 B 、稳定频率 C 、稳定线宽的 D 、稳定传输方向的 11、本书介绍的激光调制主要有哪几种调制() A 、声光偏转 B 、电光强度 C 、电光相位 D 、电光调Q 12、半导体激光器的光能转换率可以达到() A 、 25%—30% B 、70% C 、100% D 、≥50% 13、半导体光放大器英文简称是( )。 A .FRA B .SOA C .EDFA D .FBA 14、激光器的选模技术又称为( )。 A .稳频技术 B .选频技术 C .偏转技术 D .调Q 技术 15、非均匀增宽介质的增益系数阈值D G =阈( )。 A .)(21 21r r Ln L a - 内 B .hvV A n 32阈? C . 1D M s G I I + D . 2 /1) /1(S I I G +?
《地下工程测试技术实习》
目录 1实习目的和要求 (1) 2实习内容 (1) 2.1试验一基桩低应变检测 (1) 2.1.1试验原理 (1) 2.1.2试验设备 (2) 2.1.3试验依据、判别标准 (3) 2.1.4试验步骤 (9) 2.1.5试验图表绘制 (9) 2.1.6试验结果汇总 (15) 2.1.7试验注意事项 (15) 2.2试验二地脉动测试 (16) 2.2.1试验原理 (16) 2.2.2试验设备 (16) 2.2.3试验步骤 (16) 2.2.4试验参数设置 (17) 2.2.5试验图表绘制 (17) 2.2.6试验结果汇总 (19) 2.2.7试验注意事项 (19) 3参考文献 (20)
《地下工程测试技术》课程实习报告 1实习目的和要求 (1)《地下工程测试技术》课程实习是学生在学完《地下工程测试技术》课程的基础上,综合应用所学知识的一项实习任务。其目的是培养我们的综合应用基础理论和专业知识在岩土工程检测监测中应用的能力。 (2)通过实习,要求我们对原位测试有全面的了解和掌握,深入掌握位移检测、桩基检测等内容。 (3)在教师指导下,要求我们独立完成任务书规定的全部内容,并撰写实习报告。实习报告要求内容完整、排版符合要求、文字通顺、图表正确、分析准确、结论可靠。 2实习内容 2.1试验一基桩低应变检测 2.1.1试验原理 基桩低应变检测即反射波法,指的是应力波在桩身中的传播反射特征为理论的一种方法。在应用这种方法的情况下,需要将桩看成是具有连续弹性的一维均质杆,同时不考虑周土体传播的应力波对沿桩身造成的一些影响。在测试过程中,在桩顶进行纵向振动,弹性波将会沿着桩身向下进行传播,一旦桩身出现较大的波阻抗变化波动或桩身截面积改变,就会发射反射波,将它进行相应的接收、滤波、放大以及数据的处理,根据接收到的信号就能够识别各个部位的反射信息,通过专业的数据软件对这些反射信号进行综合分析判断,就能够判断出桩身的完整性。 引起反射波变化的原因:桩底、截面发生变化、夹泥、离析、混凝土质量变化、土层变化等。 低应变可以检测到的现象有桩底、夹泥、空洞、断裂、离析、扩颈、缩颈、材料变化、土层变化等,如图2-1所示;低应变检测不到的现象有渐细、渐粗、弯曲、小缺陷、桩底沉渣,如图2-2所示。
第25卷第8期岩石力学与工程学报V ol.25 No.8 2006年8月Chinese Journal of Rock Mechanics and Engineering Aug.,2006地脉动台阵方法的有效性分析 师黎静1,陶夏新2,赵纪生1 (1. 中国地震局工程力学研究所,黑龙江哈尔滨 150080;2. 哈尔滨工业大学,黑龙江哈尔滨 150090) 摘要:通过在一工程场地进行的地脉动台阵观测和速度结构反演,从地脉动观测系统、面波频散曲线的提取和反演方法等关键环节探讨反演浅层速度结构的可能性。研究结果表明:(1) 用空间自相关法提取瑞利波频散曲线,进而借助基于遗传算法的混合智能算法反演的场地浅部剪切波速度结构与钻孔法测试结果的平均相对误差在20%左右。(2) 覆盖层平均波速的结果计算与频率–波数法的分析结果几乎完全相同,但频率–波数法对上部20 m土层只得到一平均波速。(3) 方法精度与目前国际同类研究——表面波谱分析方法的精度基本相当。在岩土工程和地震工程领域,波速结构测试最直接的目的是评价场地土层的动力性能。进一步从对地震地表反应影响的角度,用一维土层的等效线性化方法分析地脉动台阵方法的有效性。分析结果表明,使用地脉动反演波速结构模型的误差远小于仅用覆盖层平均等效波速的单层模型对地表反应谱影响。仅用一平均等效波速进行抗震设计是不够的,探测浅层速度结构是非常必要的,地脉动台阵方法有潜力作为探测场地浅部剪切波速度结构的一种有效手段。 关键词:地震工程;剪切波速结构;浅部;地脉动;台阵观测;场地反应 中图分类号:P 315;TU 435 文献标识码:A 文章编号:1000–6915(2006)08–1683–08 V ALIDATION OF MICROTREMORS ARRAY METHOD SHI Lijing1,TAO Xiaxin2,ZHAO Jisheng1 (1. Institute of Engineering Mechanics,China Earthquake Administration,Harbin,Heilongjiang 150080,China; 2. Harbin Institute of Technology,Harbin,Heilongjiang 150090,China) Abstract:By the microtremors array observation and velocity structure inversion in the field of an engineering project,the accuracy of microtremors array methods(MAM) for exploring the detailed shallow velocity structure is studied with observation system,dispersion curve extraction and inversion methods. The shallow S-wave velocity structure is inversed by the hybrid method of genetic algorithm(GA) and simplex algorithm(SA) from the surface wave dispersion curve,which is inferred by the spatial auto-correlation method(SAC) from microtremors array records. The studies show that the relative average error of each layer is about 20% compared with that detected by borehole method. The average velocity obtained by SAC method and frequency wave-number method(F-K) is almost the same. However,F-K method only gives an average velocity for the upper 20-meter layer. The accuracy is compared with that of spectral analysis of surface wave(SASW) method. In the fields of geotechnical engineering and earthquake engineering,the direct goal of velocity structure exploration is site dynamic characterization. From the viewpoint of site seismic responses,the accuracy of MAM is further validated by 1D equivalent linearized analysis. The analytical results show that the difference between the response spectra from inversed velocity structure and that measured in borehole is really acceptable,whereas that for the simplified single layer model with the average velocity is quite large. The study suggests that it is not a good idea in seismic 收稿日期:2005–04–25;修回日期:2005–07–20 基金项目:国家自然科学基金资助项目(50378032);地震科学联合基金资助项目(604034) 作者简介:师黎静(1976–),男,1998年毕业于兰州大学水文地质与工程地质专业,现为博士研究生、副研究员,主要从事岩土工程和防灾减灾工程方面的研究工作。E-mail:shljiem@https://www.doczj.com/doc/a113529682.html,