仿生机器人关键技术 “仿生机器人”是指模仿生物、从事生物特点工作的机器人。,涉及到机械设计、计算机、传感器、自动控制、人机交互、仿生学等多个学科。因此,机器人领域中需要研究的问题非常多。主要研究问题包括以下五个方面: 1 建模问题 仿生机器人的运动具有高度的灵活性和适应性。其一般都是冗余度或超冗余度机器人,结构复杂,运动学和动力学模型与常规机器人有很大差别,且复杂程度更大。为此,研究建模问题,实现机构的可控化是研究仿生机器人的关键问题之一。 2 控制优化问题 机器人的自由度越多,机构越复杂,必将导致控制系统的复杂化。复杂巨系统的实现不能全靠子系统的堆积,要做到整体大于组分之和,同时要研究高效优化的控制算法才能使系统具有实时处理能力。 3 信息融合问题 在仿生机器人的设计开发中,为实现对不同物体和未知环境的感知,都装备有一定量的传感器。多传感器的信息融合技术是实现其具有一定智能的关键。信息融合技术把分布在不同位置的多个同类或不同类的传感器所提供的局部环境的不完整信息加以综合,消除多传感器信息之间可能存在的冗余和矛盾,从而提高系统决策、规划、反应的快速性和正确性。 4 机构设计问题 合理的机构设计是仿生机器人实现的基础。生物的形态经过千百万年的进化,其结构特征极具合理性,而要用机械来完全仿制生物体几乎是不可能的,只有在充分研究生物肌体结构和运动特性的基础上提取其精髓进行简化,才能开发全方位关节机构和简单关节组成高灵活性的机器人机构。 5 微传感和微驱动问题 微型仿生机器人有些已不是传统常规机器人的按比例缩小,它的开发涉及到电磁、机械、热、光、化学、生物等多学科。对于微型仿生机器人的制造,需要解决一些工程上的问题,如动力源、驱动方式、传感集成控制以及同外界的通讯等。实现微传感和微驱动的一个关键技术是机电光一体结合的微加工技术。同时,在设计时必须考虑到尺寸效应、新材料、新、工艺等问题。
第五代移动通信的关键技术 5G 是面向未来的通信发展需求的移动通信系统,第五代移动通信技术兴起的主要驱动力为互联网和物联网,将来人机交互和数据共享是人们日常生活的一部分,在这种交互下,人们的生活将会更加高效舒适。第五代移动通信系统不仅通信容量大,速率高,其可靠性和安全性也比第四代移动通信有了更好的改进,具有很大的发展空间,下面简单介绍几种第五代移动通信的关键技术。 1.Massive MIMO技术 大规模MIMO技术是指基站端采用大规模天线阵列,天线数超过十根甚至上百根,并且在同一时频资源内服务多个用户的多天线技术。大规模MIMO技术将传统的时域、频域、码域三维扩展为了时域、频域、码域、空域四维,新增维度极大的提高了数据传输速率。大规模MIMO天线技术提供了更强的定向能力和赋形能力如图1,大规模MIMO的空间分辨率与现有MIMO相比显著增强,能深度挖掘空间维度资源,使得网络中的多个用户可以在同一时频资源上利用大规模MIMO提供的空间自由度与基站同时进行通信,从而在不需要增加基站密度和带宽的条件下大幅度提高频谱效率。大规模MIMO可将波束集中在很窄的范围内,从而大幅度降低干扰,大幅降低发射功率,从而提高功率效率,减少用户间干扰,显著提高频谱效率。 当基站侧天线数远大于用户天线数时,各个用户的信道将趋于正交,小区内同道干扰及加性噪声趋于消失,系统性能仅受限于邻区导频的复用,这使得系统的很多性能都只与大尺度相关,与小尺度无关。大规模MIMO的无线传输技术将有可能使频谱效率和功率效率在4G 的基础上再提升一个量级。 图1. 大规模MIMO天线技术方向图
2. 非正交多址接入技术(NOMA) 5G的无线接入技术目前还有的观点关注多载波调制,如滤波器组多载波(FBMC,_ lter _bank based multicarrier),其天然的非正交性和不需要先前的分布式发射机同步。一种新的调制方式,被称为通用滤波后的多载波(UMFC)被提出。开始是OFDM信号,通过滤相邻子载波组,以减少时间/频率同步造成的旁瓣水平和载波间干扰。要解决OFDMA正交的时间窗口的缺点,即需要较大的保护带CP,使用多载波滤波器组就可以允许大的传输时延和任意高的频率补偿。日益发展的软件无线电,FFT块的大小,子载波间隔和CP长度可根据信道条件改变。因此,OFDMA允许一些参数可调,可以很好地适应5G的要求。 3. 射束分割多址技术(BDMA) 有限的频谱资源对于移动和无线技术而言是一个重大的挑战,即如何把有限的频率和时间分配给不同用户。由于这个情况,要实现提高系统的容量和质量,目前使用的多址技术包括频分多址(FDMA)、时分多址(TDMA)、码分多址(CDMA)、正交频分多址(OFDMA)等。然而,现在使用的所有多址技术中,通信系统容量依赖于时间和频率。如何发展多址接入系统,提高有限频率的系统容量是一个新的挑战。 目前发明的BDMA技术,根据MS的位置分配天线波束,实现多址接入,从而显著增加系统的容量。按此观点,MS和基站在视距(LOS)的状态,因此他们明确知道彼此的位置。在此条件下,他们能够将波束直接传送到彼此的位置以通信,而不受移动台在小区边缘的干扰。 为了在5G中适应BDMA,就要发展相位阵列天线,智能天线要能够调整波束。调整波束天线通过收集从基站和MS到达角(AOA)信息设置无线配置。自适应天线阵列的使用,是提高能力的一个可能性。 4. 全频段技术 5G网络通信技术将会以智能化、宽带化和多元化为主要的发展方向。未来网络数据业务的发展方向主要在热点密集地区和室内,而当前网络数据的流量如果在少数人使用状态下不存在延迟、低网速等问题,但一旦放开使用用户数量,网络延迟和网络速度都将会是一个巨大的问题,而物联网和智能终端所依赖的移动通信网络将会处于堵塞状态,很难发挥物联网和智能终端的优势。目前5G移动通信技术所研究的超密集组网,可以针对高度使用移动数据的地区提升流量容量1000倍,很好的解决了网络数据使用密集地区的数据传输和数据容量问题。该技术的发展,虽然在数据流量方面提升率非常高,但是由于其拓扑结构也更加复杂,各网络之间的信号干扰也是一个很大的麻烦,大家都知道一旦同一个区域的无线网络过多,就会相互之间产生干扰,影响网络的传输。因此,该技术还需要进一步的研究以适用
人机交互界面设计规范 (讨论稿) Hygrand 上海华冠电子设备有限责任公司 Hygrand Electronic Equipment CO., LTD.Shanghai
1. 必须在编码之前完成,否则就成花架子了。 2. GUI规范不是一蹴而就,它和设计相互迭代,彼此补充,相互完善。 3. GUI规范的内容70%是通用原则,涉及产品图形控件的基本属性和构建的基本参数和原则,30% 是与项目或产品特点相适应的内容,这部分内容就是在设计过程中迭代产生。 1.概述 <目的、适用项目、基本风格> 2.通用指导原则 2.1.易用性 理想的情况是用户不用查阅帮助就能知道该界面的功能并进行相关的正确操作。如按钮名称应该易懂,用词准确,要与同一界面上的其他按钮易于区分。 <补充易用性细则> 完成同一功能或任务的元素放在集中位置,减少鼠标移动的距离。 复选框和选项框要有默认选项,并支持Tab选择。 …… 2.2.规范性 通常界面设计按Windows界面的规范,即包含“菜单条、工具栏、状态栏、滚动条、右键快捷菜单”等的标准格式,界面遵循规范化的程度越高,则易用性相应的就越好。 <补充规范性细则> 工具栏的图标能直观的代表要完成的操作。 标签提示:字体为加重、宋体、黑色、无边框。 对齐方式:左对齐、一般文字、单个数字、日期等。 等待过程:在需等待时间较短(0-10秒)的情况下应将鼠标显示成为沙漏;当需10秒以上时,要显示进度条等。 菜单深度一般要求最多控制在三层以内。 ……
2.3.美观与协调性 界面应该适合美学观点,感觉协调舒适,能在有效的范围内吸引用户的注意力。 <补充美观与协调性细则> 父窗体或主窗体的中心位置应该在对角线焦点附近。 按钮的大小要与界面的大小和空间要协调。 …… 2.4.独特性 在框架符合以上规范的情况下,设计具有自己独特风格的界面尤为重要。尤其在商业软件流通中有着很好的迁移默化的广告效用。 <补充独特性细则> 安装界面上应有单位介绍或产品介绍,并有自己的图标。 登录界面上要有本产品的标志,同时包含公司图标。 …… 2.5.快捷方式 在菜单及按钮中使用快捷键可以让喜欢使用键盘的用户操作得更快一些,在Windows 及其应用软件中快捷键的使用大多是一致的。 <补充快捷方式细则> 文件操作:如打印、关闭相应的快捷键。 系统菜单:如工具、帮助等的快捷键。 …… 2.6.安全性 在界面上通过下列方式来控制出错几率,会大大减少系统因用户人为的错误引起的破坏。 <补充安全性性细则> 应当注意尽可能避免用户无意录入无效的数据。 采用相关控件限制用户输入值的种类。 ……
医疗行业数据中心设计方案
目录 1. 建设背景 (1) 1.1 行业概述 (1) 1.2 行业背景 (1) 2. 总体架构设计 (2) 2.1 设计思路 (2) 2.2 设计原则 (3) 2.3总体逻辑架构 (3) 2.4总体物理架构 (4) 3. 基础设施设计 (6) 3.1互联网接入区设计 (6) 3.2 核心交换区设计 (6) 3.3 存储设计 (9) 4. 云资源池设计 (10) 4.1 计算资源池规划 (10) 4.1.1 资源评估原则 (10) 4.1.2 集群设计 (10) 4.1.3 可靠性设计 (11) 4.2 存储资源池设计 (12) 4.2.1 评估原则 (12) 4.2.2 资源池设计 (13) 4.2.3 可靠性设计 (14) 4.2.4 备份存储设计 (14) 4.3 虚拟网络设计 (15) 5.业务系统设计 (16) 5.1 整体可靠性指导 (16) 5.2整体备份设计 (16) 5.2.1 虚拟机备份 (16) 5.2.2 应用层备份 (17) 5.3 医院信息系统(HIS) (17)
5.3.1 虚拟机配置设计 (17) 5.3.2 虚拟机备份设计 (18) 5.3.3迁移设计 (18) 5.4电子病历系统(EMR) (19) 5.4.1 虚拟机配置设计 (19) 5.4.2 虚拟机备份设计 (20) 5.4.3 迁移设计 (20) 5.5 检验科信息系统(LIS) (21) 5.5.1 虚拟机配置设计 (21) 5.5.2 虚拟机备份设计 (22) 5.5.3 迁移设计 (22) 5.6 影像存档和通信系统(PACS) (23) 5.6.1 虚拟机配置设计 (23) 5.6.2 虚拟机备份设计 (24) 5.6.3 迁移设计 (24)
项目名称:人机交互力反馈遥操作机器人关键技术及应用 完成人:宋爱国,宋光明,李会军,唐鸿儒,崔建伟,赵国普,徐宝国,吴涓,李建清,卢伟,包加桐 完成单位:东南大学,扬州大学 项目简介: 人机交互力反馈遥操作机器人系统将人的知识智慧与机器人的适应性相结合,通过人与机器人之间传感与控制信息的交互,可以实现各种远地环境或危险环境中的复杂作业任务,是当前各发达国家竞相发展的高技术。随着人机交互遥操作机器人在远程作业、远程监控、远程制造、远程医疗等领域的应用,迫切需要解决多个技术难题与技术瓶颈。本项目针对人机交互力反馈遥操作机器人的力感知、力反馈、大时延控制和人机交互界面设计等关键技术,经过十多年系统深入的研究,突破了多项核心技术,研制成功人机交互遥操作的关键支撑设备,填补了国内空白,并在多个重要领域得到成功应用。 本项目的技术创新点:(1)提出了一种自解耦的机器人多维力传感器的敏感单元设计方法,从传感器的结构设计上有效降低了多维力传感器的维间耦合效应;提出了一种基于误差建模的多维力传感器解耦算法,提高了多维力传感器的测量精度,测量精度可达1%F.S.。(2)提出了一种基于磁流变液控制的无源力觉再现方法,解决了大量程力反馈人机交互设备的体积大、惯性大与不安全问题,实现了大量程安全柔性的力触觉人机交互。提出了一种基于并联机构的异构式机器人力反馈手控器设计方法,解决了力反馈手控器三维平动和三维转动之间运动与力的耦合问题,六维运动位置测量精度达1%F.S.,力反馈精度达2%F.S.。(3)针对人机交互力反馈遥操作机器人在双边通讯环节上存在的短时延(≤2 秒)造成的不稳定问题,提出了力反馈遥操作机器人的多模式控制技术和自适应阻抗匹配无源控制算法,解决了短时延情况下力反馈遥操作机器人的稳定性和操作性问题;针对人机交互力反馈遥操作机器人在双边通讯环节上存在的大时延(>2 秒)造成的不稳定难题,提出了基于虚拟环境建模的力反馈遥操作机器人预测控制技术,给出了基于滑动最小二乘法的环境动力学参数在线辨识算法和模型滚动修正方法,解决了大时延情况下力反馈遥操作机器人稳定性和操作性问题。(4)提出了以提高人的感知能力为目标的交互式力反馈遥操作机器人的多感知界面设计方法,并针对人机交互界面力触觉感知与视觉感知的协调同步问题,提出了一种分布式力触觉交互的快速计算算法和无源稳定性判据,实现了多感知通道人机交互方式下具有力觉临场感的遥操作。 本项目获国家发明专利授权33项;获实用新型专利授权5项;获计算机软件著作权2项。发表论文186,其中SCI收录65篇,EI收录107篇,论文被他人引用1200多次,其中SCI他引375次,并在国际遥控机器人会议上作大会特邀报告。本项目相关成果曾获2010年国家知识产权局中国专利优秀奖、2012年与2013年日内瓦国际发明金奖等。
人机界面设计原则 “以人为本” 1.以用户为中心的基本设计原则 在系统的设计过程中,设计人员要抓住用户的特征,发现用户的需求。在系统整个开发过程中要不断征求用户的意见,向用户咨询。系统的设计决策要结合用户的工作和应用环境,必须理解用户对系统的要求。最好的方法就是让真实的用户参与开发,这样开发人员就能正确地了解用户的需求和目标,系统就会更加成功。 2.顺序原则 即按照处理事件顺序、访问查看顺序(如由整体到单项,由大到小,由上层到下层等)与控制工艺流程等设计监控管理和人机对话主界面及其二级界面。 3.功能原则 即按照对象应用环境及场合具体使用功能要求,各种子系统控制类型、不同管理对象的同一界面并行处理要求和多项对话交互的同时性要求等,设计分功能区分多级菜单、分层提示信息和多项对话栏并举的窗口等的人机交互界面,从而使用户易于分辨和掌握交互界面的使用规律和特点,提高其友好性和易操作性。 4.一致性原则 包括色彩的一致,操作区域一致,文字的一致。即一方面界面颜色、形状、字体与国家、国际或行业通用标准相一致。另一方面界面颜色、形状、字体自成一体,不同设备及其相同设计状态的颜色应保持一致。界面细节美工设计的一致性使运行人员看界面时感到舒适,从而不分散他的注意力。对于新运行人员,或紧急情况下处理问题的运行人员来说,一致性还能减少他们的操作失误。 5.频率原则 即按照管理对象的对话交互频率高低设计人机界面的层次顺序和对话窗口莱单的显示位置等,提高监控和访问对话频率。 6.重要性原则 即按照管理对象在控制系统中的重要性和全局性水平,设计人机界面的主次菜单和对话窗口的位置和突显性,从而有助于管理人员把握好控制系统的主次,实施好控制决策的顺序,实现最优调度和管理。 7.面向对象原则 即按照操作人员的身份特征和工作性质,设计与之相适应和友好的人机界面。根据其工作需要,宜以弹出式窗口显示提示、引导和帮助信息,从而提高用户的交互水平和效率。
一、UMTS基本概念 UMTS是通用移动通信系统(Universal Mobile Telecomunication)的简称。它是ITU的IMT-2000第三代移动通信系统(3G)的重要组成部分。 UMTS系统将整个网络划分为两部分,即核心控制部分、无线接入部分。 在核心控制部分采用ATM技术及相应的接口技术达到同时支持电路交换、包交换两种方式的目的。 在无线接入部分采用UTRA(UMTS Terrestrial Radio Access)作为全球地面无线接入的标准。UTRA接口的基础为W-CDMA技术,它具有CDMA技术的全部优点。同时,它还可以根据不同话务分布在无线接入中采用不同的调制解调方式:对于话务密度较高的城区可采用TDD方式、郊区则可采用FDD方式,为灵活组网提供了极大的方便。 UMTS系统除支持现有的话音、数据业务外,还可以为移动用户提供全新的交互式多媒体业务。它的高容量系统可提供2Mbit/s的数据传输速率。目前,英国、德国等部分欧洲国家将陆续开通UMTS的商用网络。UMTS技术已引起了全球范围的广泛关注。 二、UMTS网络结构与接口 1.整体网络结构分为UTRA网络和核心网络两大部分。 UTRA网络中的网元种类较少,主要包括BTS和RNC两种。BTS与GSM系统中的基站相同,是无线信号收发的基本单元,它可以支持WCDMA的编码方式。RNC(无线网络控制器)的功能相当与GSM系统中BSC与GPRS的PCU 两者的结合,它承担无线资源管理、BTS控制以及切换管理等功能。RNC之间采用ATM方式连接。 整个无线接入网络的主要功能包括: (1)无线资源管理(RRM功能); (2)无线接续的移动管理(如切换管理功能); (3)无线接入承载(RAB功能),可以根据核心网络的不同要求提供不同的接口类型; (4)安全功能管理(如加密等); (5)位置业务(LCS)管理,从而确定用户设备的位置信息。 核心网络分为电路交换部分、包交换部分两个层面。电路交换部分中TRAU为编码变换单元,为UTRA与MSC提供连接。它将RNC侧的ATM传输方式转换为TDM,从提供MSC所必需的电路连接。MSC、HLR、VLR功能与GSM 网中相应网元的功能一致。包交换部分的结构与GPRS结构相近:SGSN为UE提供移动性管理、路由选择等服务;GGSN主要是提供与外部数据网的接口;DNS即域名服务器,将域名翻译成相应的IP地址。从网络结构可以看出UMTS 系统核心网络部分是基于GSM/GPRS网络的演进,保持了与GSM/GPRS系统的兼容性,可以提供现有GSM系统的相关服务。核心网络可以将用户接入各种外部网络以及业务平台,如:电路交换话音网、包交换话音网(IP语音网)、数据网、Internet、Intranet、电子商务、短信中心等。 2.UMTS系统主要包括以下接口类型: (1)B接口:MSC(VLR; (2)D接口:MSC(HLR; (3)E接口:MSC(MSC; (4)Gc接口:GGSN(HLR; (5)Gj接口:GGSN(外部数据网
智能机器人的关键技术及其发展趋势 机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。按联合国标准化组织采纳了美国机器人协会给机器人下的定义,即为:一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。 而智能机器人有相当发达的“大脑”。在脑中起作用的是中央计算机,这种计算机跟操作它的人有直接的联系。它给人的最深刻的印象是一个独特的进行自我控制的“活物”。其实,这个自控“活物”的主要器官并没有像真正的人那样微妙而复杂。到目前为止,在世界范围内还没有一个统一的智能机器人定义。大多数专家认为智能机器人至少要具备以下三个要素:一是感觉要素,用来认识周围环境状态;二是运动要素,对外界做出反应性动作;三是思考要素,根据感觉要素所得到的信息,思考出采用什么样的动作。 智能机器人根据其智能程度的不同,又可分为三种: 传感型机器人,又称外部受控机器人。机器人的本体上没有智能单元只有执行机构和感应机构,它具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理、实现控制与操作的能力。受控于外部计算机,在外部计算机上具有智能处理单元,处理由受控机器人采集的各种信息以及机器人本身的各种姿态和轨迹等信息,然后发出控制指令指挥机器人的动作。目前机器人世界杯的小型组比赛使用的机器人就属于这样的类型。 交互型机器人,机器人通过计算机系统与操作员或程序员进行人-机对话,实现对机器人的控制与操作。虽然具有了部分处理和决策功能,能够独立地实现一些诸如轨迹规划、简单的避障等功能,但是还要受到外部的控制。 自主型机器人,在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务。自主型机器人的本体上具有感知、处理、决策、执行等模块,可以就像一个自主的人一样独立地活动和处理问题。机器人世界杯的中型组比赛中使用的机器人就属于这一类型。全自主移动机器人的最重要的特点在于它的自主性和适应性,自主性是指它可以在一定的环境中,不依赖任何外部控制,完全自主地执行一定的任务。适应性是指它可以实时识别和测量周围的物体,根据环境的变化,调节自身的参数,调整动作策略以及处理紧急情况。交互性也是自主机器人的一个重要特点,机器人可以与人、与外部环境以及与其他机器人之间进行信息的交流。由于全自主移动机器人涉及诸如驱动器控制、传感器数据融合、图像处理、模式识别、神经网络等许多方面的研究,所以能够综合反映一个国家在制造业和人工智能等方面的水平。因此,许多国家都非常重视全自主移动机器人的研究。 下面就机器人的控制技术以及列举几种常见的机器人对当前智能机器人的关键技术进行分析。
LTE无线网侧接口协议考试题库及答案 1. RLC实体不可被配置成为哪种模式()。 A.TransparentMode B.UnacknowledgedMode C.TransportMode【正确答案】 D.AcknowledgedMode 2. 在eNodeB的MAC子层与物理层的SAP是哪个?() A.逻辑信道 B.传输信道【正确答案】 C.物理信道 D.无线承载 3. 在LTE系统中,e-NodeB侧对控制面数据通过()协议与MME交互。 A.GTPU/UDP B.X2AP/SCTP C.S1AP/SCTP【正确答案】 D.RRC 4. LTE空口协议栈中,数据的压缩功能位于()层。 A.PHY B.RRC
C.RLC D.PDCP【正确答案】 5. QoS是下列哪个选项()的缩写。 A.关键性能指标 B.关键质量指标 C.服务质量【正确答案】 D.用户体验质量 6. 以下哪种RLC实体最适合用于VoIP业务:()? A.AM B.TM C.UM【正确答案】 7. 在LTE系统协议中,eNB侧MAC层对下行数据进行处理是()? A.编码 B.复用【正确答案】 C.压缩和加密、 D.调制 8. TD-LTE空口中,哪一个属于层二(Layer 2)?() A.RRC B.RLC【正确答案】 C.PHY D.NAS
9. LTE中,专用承载建立过程的触发,一定是在UE RRC如下状态()? A.RRC-idle B.RRC-connected【正确答案】 C.cell-dch D.cell-fach 10. MAC提供不同的逻辑信道给层2的()子层,逻辑信道的作用是表征传输的消息类型。() A.物理层 B.数据链路层 C.RLC层【正确答案】 D.RRC层 11. RRC_IDLE状态下不具有的功能:?() A.PLMN选择 B.系统消息广播 C.寻呼 D.eNodeB中有RRC上下文存储【正确答案】 E.NAS对DRX的配置 12. 下列哪个功能不是MME具有的?() A.用户面数据的加密【正确答案】 B.寻呼信息发送 C.Idle态的移动性管理
易讯通(EASTED)私有云超融合 解决方案(V0.5) 北京易讯通信息技术股份有限公司 2016年5月
目录
1.项目背景 过去十年来,随着互联网和Web技术的兴起,数据中心的战略地位变得越来越重要,因为它不但能提高生产率,改善业务流程,还能加快变革的进程。总之,数据中心已经成为IT部门保护、优化和发展业务的战略重点。 当前,企业IT数据中心虚拟化向私有云架构转变是行业发展的趋势,更是未来的标准。利用虚拟化软件将物理服务器虚拟成多个虚拟机,把应用部署不同的虚拟中运行,通过云管理平台提供自服务、自动化的运行环境,为企业提供更高的运行密度和更敏捷解决方案。在传统计算存储分离的体系架构下,虚拟机在计算服务器上被创建,其后端存储通常采用SAN/NAS。这种架构已经不能满足企业IT数据中心高速发展和变化的需求,主要体现在:?扩展困难 传统存储SAN/NAS通过添加新的存储柜扩容升级(ScaleUp),但是这种方法并不能带来同倍的性能提升。存储访问性能并不能随着虚拟机数据量增加而线性增加,致使存储访问性能最终成为数据中心性能和容量的瓶颈。 ?管理复杂 IT管理员不仅需要同时管理计算、存储和网络系统,还需要对应用于服务进行管理,非常繁琐。同时传统网络存储架构SAN/NAS期初就是为静态负载场景设计,对于动态变化的负载,其管理运维就会变得相对复杂。 ?性能问题 虚拟机部署在共享的存储系统,对存储系统的性能要求不同与传统架构,在大规模虚拟机应用的环境中,采用传统的存储设备难以满足虚拟机对磁盘性能的需求。 ?可靠性低 虚拟机的高可用功能需要健康的共享存储系统实现,一旦存储设备发生故障将导致整个数据中心的运行中断。多数的企业无法承担双活存储系统的高昂资金投入和管理双活存储系统所需要的专业知识。 未来企业IT数据中心的问题,本质上多归结为计算与存储系统发展不均衡的问题,Google、Amazon这样的顶级互联网公司多年前已遇到此类问题。 它们发现任何商业存储产品都无法满足他们高速增长的数据业务需求。于是
Windows Server 2016 Hyper-Converged Solution - Virtual Machines and Software Defined Storage on the Same Cluster Windows Server 2016 Technical Preview introduces Storage Spaces Direct, which enables building highly available (HA) storage systems with local storage. This is a significant step forward in Microsoft Windows Server software-defined storage (SDS) as it simplifies the deployment and management of SDS systems and also unlocks use of new classes of disk devices, such as SATA and NVMe disk devices, that were previously not possible with clustered Storage Spaces with shared disks. Windows Server 2016 provides a hyper-converged solution by allowing the same set of servers to provide SDS, through Storage Spaces Direct (S2D), and serve as the hosts for virtual machines using Hyper-V. The same How to Use this Guide: This document provides both an introductory overview and specific standalone examples of how to deploy a Hyper Converged Solution with Storage Spaces Direct. Before taking any action, it is recommended that you do a quick read through of this document to familiarize yourself with the overall approach, to get a sense for the important Notes associated with some steps, and to acquaint yourself with the additional supporting resources and documentation. Hyper-converged Solution with Software Defined Storage Overview In the Hyper-Converged configuration described in this guide, Storage Spaces Direct seamlessly integrates with the features you know today that make up the Windows Server software defined storage stack, including Clustered Shared Volume File System (CSVFS), Storage Spaces and Failover Clustering. The hyper-converged deployment scenario has the Hyper-V (compute) and Storage Spaces Direct (storage) components on the same cluster. Virtual machine's files are stored on local CSVs. This allows for scaling Hyper-V compute clusters together with the storage it’s using. Once Storage Spaces Direct is configured and the CSV volumes are available, configuring and provisioning Hyper-V is the same process and uses the same tools that you would use with any other Hyper-V deployment on a failover cluster. Figure 5 illustrates the hyper-converged deployment scenario. 1
高校IT基础架构设施升级方案----SMARTX超融合+虚拟化解决方案 北京中科泰科技有限公司
一、当前高校数据中心的现状和问题 随着高校信息化建设的不断深入,各个部门各个院系都根据各自的业务需求建设了相应的应用系统,而且增加的速度非常快,数据量也是呈几何级数的增长,随之而来的也给机房带来新的挑战:第一,资源整合问题:各院系各部门烟囱式信息化建设,存在大量信息孤岛,资源无法共享。各自购买添加服务器和存储等硬件设施,资源的总体利用效率较低。第二,应用扩展问题:服务器托管模式,新应用部署需要频繁接入机房,布线、配置网络,部署时间长。大部分新应用没有对存储、备份、可靠性等进行统一规划,机房的硬件设施没有统一规划,网络拓扑结构越来越复杂,新增系统布线困难。 第三,运维运营问题:由于信息中心人力资源有限,而各院系人员运维运营能力薄弱,导致信息中心工作压力越来越大,工作人员经常超负荷工作。第四,拥有成本和能耗问题:硬件资源分散在各个院系和部门,资源利用效率低,运维总体成本大,能耗高。第四,空间问题:每年大量投入新增硬件设施,增加机柜,机房空间越来越局促。 面对信息化建设的挑战,该如何利用新技术更好的支撑高校信息化建设,提供更好的IT服务,满足各个院系各个部门的期望?我们认为,采用目前国际上流行的最先进的超融合加虚拟化技术重新建立标准统一、安全可扩展的超融合IT基础架构,重新定义数据中心,将IT设备以可水平扩展的资源池的方式提供给各个院系各个部门,达到资源利益效率最大化,同时节省IT 基础设施投资成本,节省数据中心能耗,实现绿色数据中心。 二、虚拟化与高校IT基础设施 高校IT业务的迅猛发展要求IT基础设施将能满足其快速增长及变化的需求,传统IT架构已经被证实无法有效应对这种业务增长和变化的境况。服务器虚拟化技术的出现和兴起,高效的解决当前面临的一系列难题,将成为未来IT 基础架构的发展方向。虚拟化技术,以按需、易扩展的方式获得所需的资源应用。提供的资源被称为虚拟资源,虚拟资源在使用者看来是可以无限扩展的,并且可以随时获取,按需使用。虚拟化技术带来了以下几个好处和变革:
基于FPGA的IDE硬盘接口卡的实现 摘要:本文介绍了一种基于FPGA技术的IDE硬盘接口的设计。该卡提供两个符合ATA-6规范的接口,采用FPGA实现了两套IDE接口功能,设计支持PIO 和Ultra DMA传输模式,文章侧重于介绍用FPGA实现IDE接口协议的具体方法。 关键词:FPGA;硬盘;IDE接口 引言 本文采用FPGA实现了IDE硬盘接口协议。系统提供两套符合ATA-6规范的IDE接口,一个与普通IDE硬盘连接,另一个与计算机主板上的IDE接口相连。系统采用FPGA实现接口协议,完成接口数据的截获、处理(在本文中主要是数据加密)和转发,支持PIO和Ultra DMA两种数据传输模式。下面重点介绍用FPGA实现接口协议的方法。 1 IDE接口协议简介 1.1 IDE接口引脚定义 IDE(Integrated Drive Electronics)即“电子集成驱动器”,又称为ATA接口。表1列出了ATA标准中IDE接口上的信号。其中,带“-”的信号(如RESET-)表示低电平有效。“方向”是相对于硬盘而言,I表示进入硬盘,O表示从硬盘出来,I/O表示双向。
表1:IDE接口引脚定义 1.2 IDE控制器的寄存器组 主机对IDE硬盘的控制是通过硬盘控制器上的两组寄存器来实现的。一组为命令寄存器组;另一组为控制/诊断寄存器,如表2所示。
表2寄存器组 特征寄存器中的内容作为命令的一个参数,其作用随命令而变。扇区数寄存器指示该次命令所需传输数据的扇区数。扇区号寄存器、柱面数寄存器(低、高)、驱动器/磁头寄存器三者合称为介质地址寄存器,指示该次命令所需传输数据首扇区的地址,寻址方式可以用“柱面/磁头/扇区(CHS)”或“逻辑块地址(LBA)”方式,在驱动器/磁头寄存器中指定。 命令寄存器存储执行的命令代码。当向命令寄存器写入命令时,相关的参数必须先写入。命令写入后,硬盘立即开始命令的执行。状态寄存器保存硬盘执行命令后的结果,供主机读取。其主要位有:BSY-驱动器忙,DRDY-驱动器准备好,DF-驱动器故障,DRQ-数据请求,ERR-命令执行出错。辅助状态寄存器与状态寄存器的内容完全相同,但读该寄存器时不清除中断请求。错误寄存器包含 了命令执行出错时硬盘的诊断信息。 数据寄存器为PIO传输模式下,主机和硬盘控制器的缓冲区之间进行数据交换的寄存器。数据端口为DMA传输模式下专用的数据传输通道。 1.3 IDE数据传输方式
浅谈人工智能中六大关键技术 当前,人工智能可谓是科技领域炙手可热的话题了,很多公司完善人工智能技术,研发人工智能产品。从Siri语音到智能家居,从无人驾驶到人工智能机器人,人工智能正在一步步改变我们的生活方式,我们还在憧憬着,人工智能还能带给我们些什么。现如今,人工智能已经逐渐发展成一门庞大的技术体系,在人工智能领域,它普遍包含了机器学习、深度学习、人机交互、自然语言、机器视觉等多个领域的技术,下面进行这些人工智能中这些关键技术的介绍。 机器学习 机器学习是一门多领域交叉学科,涉及统计学、系统辨识、逼近理论、神经网络、优化理论、计算机科学、脑科学等诸多领域。通过研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能。通过知识结构的不断完善与更新来提升机器自身的性能,这属于人工智能的核心领域。基于数据的机器学习是现代智能技术中的重要方法之一,研究从观测数据(样本)出发寻找规律,利用这些规律对未来数据或无法观测的数据进行预测。阿尔法Go就这项技术一个很成功的体现。 根据学习模式将机器学习分类为监督学习、无监督学习和强化学习等。根据学习方法可以将机器学习分为传统机器学习和深度学习。 深度学习技术 深度学习的概念由Hinton等人于2006年提出。深度学习可以有人监督(需要人工干预来培训基本模型的演进),也可以无人监督(通过自我评估自动改进模型)。深度学习目前广泛运用于各类场合,在财资管理领域,如可以通过深度学习来进行现金流预测和头寸智能化管理。 深度学习则是是机器学习各项技术中发展最旺盛也是最成功的一个分支。我们常说的人工神经网络是机器学习中的一种算法。机器学习的其他算法包括聚类算法、贝叶斯算法等。在量化交易、智能投资和智能风控中,往往会应用机器学习技术。 人机交互
超融合解决方案交流技巧
话题引入: 随着信息技术的发展,各类云计算、云数据中心、私有云、公有云、混合云等概念和方案层出不穷,我今天过来,就是想给您汇报下目前这些技术到底是什么,如何实现私有云的快速落地。 业界的数据中心发展最早为传统烟囱式数据中心,后来发展到了服务器虚拟化的数据中心,这比以往的传统结构有了新的突破,可以大幅提升服务器资源利用率,大幅提升业务上线效率,但是在网络管理、业务编排、自动运维等方面仍然无计可施,之后业界逐渐提出了SDN(软件定义网络)和SDDC(软件定义数据中心)的概念,我今天给您带来的方案称之为“超融合”。他隶属于SDDC的范畴,是深信服提出的基于SDDC建设私有云整体方案的一套基本架构。 这套架构是靠通用的硬件交换机组成一个大的二层网络,在大量X86服务器上,用软件虚拟化的技术方式,将所有服务器、存储、数据中心网络结构、软件应用系统等进行统一融合,并按照我们的业务要求,进行重新编排的解决方案。 其实早在5年前,超融合的整体架构就已经在国外大规模实施了,只不过当时业内没有提出“超融合”这样的概念;而近几年,这种超融合的方案在国内也开始了大规模部署,比如阿里、亚马逊等大型公有云服务商采用的就是这种架构,其他如国家卫计委、国家行政学院、国家信息安全中心,在广东,如广东省统计局、番禺区地税局、佛山市三水区信息中心、海印集团、广东理工职业学院、佛山市人民防空办公室、广东烟草阳江市有限责任公司、广州市地税局的企业税收管理局、河源市和平县人民法院、中山市技师学院、中山中粤马口铁工业有限公司;这套超融合的基础架构可以非常简单的扩展至未来私有云,所以,本方案具备极强的开放性与前瞻性,在很多单位都以创新项目得到了审批。 为什么越来越多的单位开始采用超融合的架构去搭建数据中心呢,在业界来看,传统数据中心有以下几个问题: 1、建设成本高。传统数据中心,从硬件上来看,每个系统单独占用一台物理服务器,根据我们大量统计来看,这种模式服务器资源利用率极低,十多个系统对应十多台服务器,将造成了大量资源的浪费,而后期各类系统上线的建设成本也将很高; 2、系统稳定性无法保障。一旦物理服务器出现故障,所承载的应用系统将无法提供服务,造成业务的长期中断,需要管理员手动调整进行业务恢复;如果发生不可修复性故障,将直接造成数据的丢失,对单位造成重大损失,如果存储设备单机部署且发生故障,将带来
UI设计概述(2008-07-22 10:38:23)转载标签:ui概述流程it 分类:IT UI设计在项目开发过程中工作量最大、最艰苦也是最难以控制的阶段。不管一座大楼的设计蓝图多宏伟,若没有管道工、泥瓦匠、水电工等各种工匠一砖一瓦地艰辛积累,密切协作,这座大楼始终是空中楼阁、海市蜃楼。 一、界面设计 1)深入用户分析 要进行界面开发设计,用户分析是第一步。总所周知,进行任务和用户分析,以及相关调研的必要性和重要性。用户是计算机资源,软件界面信息的使用者,由于目前计算机系统以及相关的信息技术应用范围很广,其用户范围也遍及各个领域。我们必须了解各类用户的习性,技能、知识和经验,以便预测不同类别的用户对界面有什么不同的需要与反应,为交互系统的分析设计提供依据和参考,使设计出的交互系统更适合于各类用户的使用。由于用户具有知识、视听能力、智能、记忆能力、可学习性、动机、受训练程度、以及易遗忘、易出错等特性,使得对用户的分类、分析和设计变得更加复杂化。另外,为了设计友好而又人性化的界面,也必须考虑各类不同类型用户的人文因素。 在软件设计过程中,需求设计角色会确定软件的目标用户,获取最终用户和直接用户的需求。 用户交互要考虑到目标用户的不同引起的交互设计重点的不同。 例如:对于科学用户和对于电脑入门用户的设计重点就不同。 2)设定合理的交互方式 软件界面是人—机之间的信息界面,交互是一个结合计算机科学、美学、心理学、人机工程学等工业和商业领域的行为,其目标是促进设计,执行和优化信息与通信系统以满足用户的需要。 在交互过程中,交互设计关系到用户界面的外观与行为,它不完全受软件的约束。界面设计师以及决定如何与用户进行交互的工程师应该在这一领域深入研究。在界面开发过程中,他们必须贴近用户,或者与用户一道来讨论并得出结果,所以他们的工作是较为辛苦但是最具有意义的。 另一方面,界面与软件代码的生成,代码本身的意义以及功能的实现是紧密联系的。因此编译代码的人同样也应该在这方面做深入的研究。过去,编码人员只是单独地进行软件研发,而缺少必要的美学知识和界面专门技术来处理交互的问题。不幸的是,最终的结果往往不是用户所期望的。对于用户而言,最好的交互方式让程序员去实现往往是最难的,由此矛盾出现了,这使得很多专家或者工程师肤浅地应付一些交互方面的问题。以至于在软件开发完成之后,这些专家和工程师惊讶地发现,用户对他们所实现的特征感到一片茫然,不知所措,通常选用另外一种方式进行交互。不同类型的目标用户有不同的交互习惯。这种习惯的交互方式往往来源于其原有的针对现实的交互流程、已有软件工具的交互流程。 当然还要在此基础上通过调研分析找到用户希望达到的交互效果,并且以流程确认下来。 3)提示和引导用户
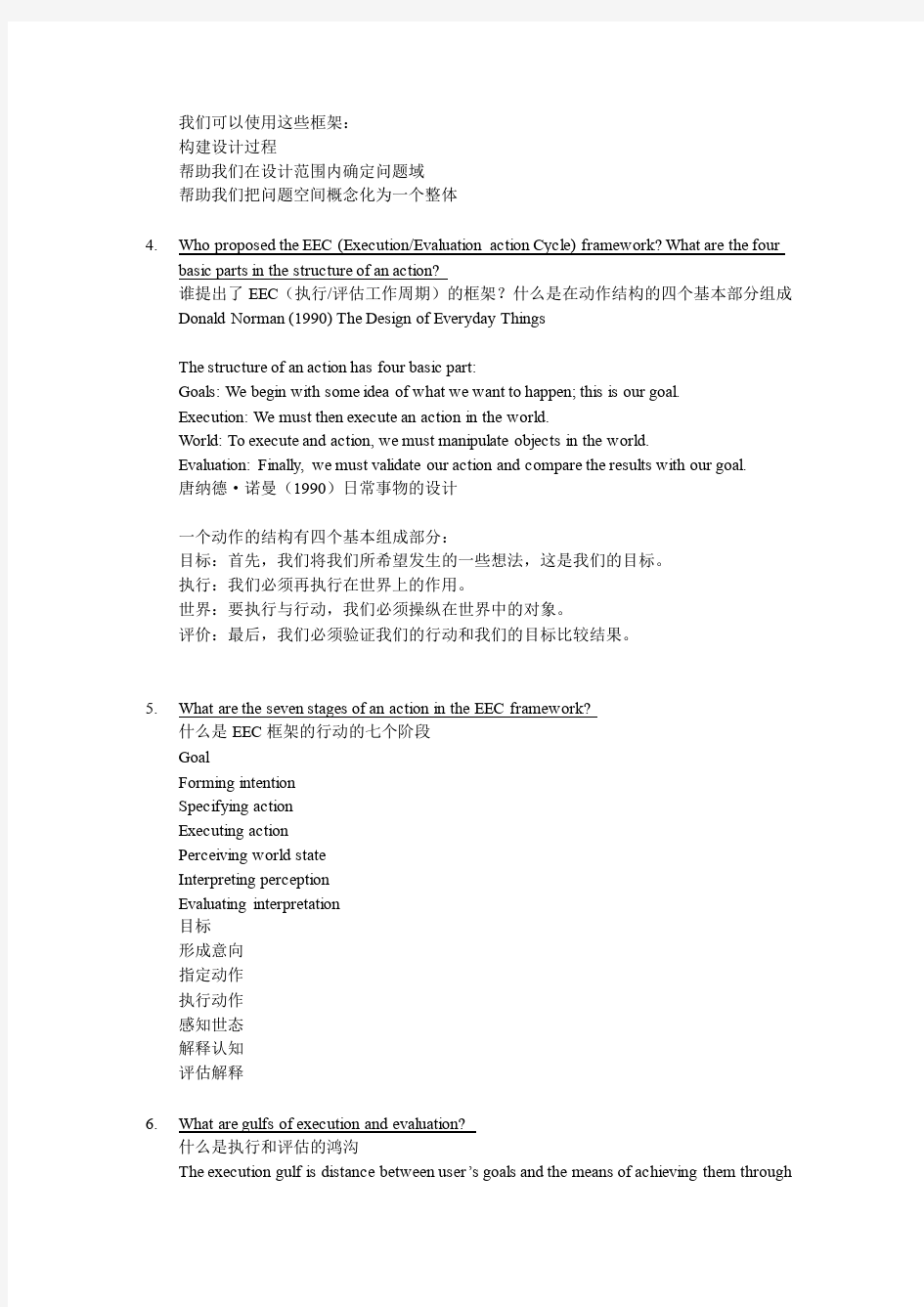
机器人与关键技术解析 机器人(robot)一词,最早出现在1920年捷克科幻作家恰配克的《罗索姆的万能机器人》中,原文作“Robota”,后来成为英文中通行的“Robot”。更科学的定义是1967年由日本科学家森政弘与合田周平提出的:“机器人是一种具有移动性、个体性、智能性、通用性、半机械半人性、自动性、奴隶性等7个特征的柔性机器。” 国际机器人联合会将机器人分为两类,工业机器人和服务机器人。工业机器人是“一种应用于工业自动化的,含有三个及以上的可编程轴的、自动控制的、可编程的、多功能执行机构,它可以是固定式的或移动式的”。服务机器人则是“一种半自主或全自主工作的机器人,它能完成有益于人类健康的服务工作,但不包括从事生产的设备”。从定义可见,分类的标准是机器人的应用场合。 一般的机器人都由机械结构、控制驱动系统、感知系统、交互系统等部分组成。 图1 一般机器人的系统构成 近年来工业机器人供应量在大多数行业都呈现出上涨的态势。而服务机器人发展历史较短。其在功能上的主要不同体现在两个方面:一是与人的沟通协作;二是在复杂环境下代替人的部分工作。
发展现状 仿生机器人 “机器人”这个名称本身就带有仿生学色彩,目前已有不少类人机器人、机器狗等产品问世,这些产品大部分只具有娱乐功能。然而2013年底在美国佛罗里达州Homestead举办的DARPA机器人挑战赛则将仿生机器人推到了救灾救援的应用领域。该赛事设计了通过布满障碍物的门、崎岖路行走、破拆墙面、连接消防栓、转动阀门等八项比赛任务,吸引了来自世界各地的16支仿生机器人团队。从比赛任务的设置可以看出,比赛非常鲜明地突出了仿生机器人在救灾救援方面的应用。经过激烈的角逐,日本Schaft公司生产的HRP-2机器人最终夺魁。来自弗罗里达的一家非盈利机构和卡耐基-梅隆大学分获二、三名。值得一提的是,Schaft机器人已在早些时候被Google收购,而第二、四名团队所用的Atlas 机器人也来自Google旗下的Boston Dynamics。作为世界上最具创新实力的科技公司之一,Google的收购行为也表明了仿生机器人具有一定的市场前景。 机器人在救援救灾方面,与人类相比具有巨大的优势,可以极大提高搜救效率和减少人员伤亡。但同时,从该赛事也可以看出,所有的机器人在比赛中都出现过故障,甚至有3支代表队最终得了零分。即使完成比赛,机器人的动作也显得呆板迟钝。这些都表明目前的仿生机器人技术还不成熟,具