伽利略与北斗竞争难停息欧洲仍占多项优势
- 格式:doc
- 大小:701.50 KB
- 文档页数:14
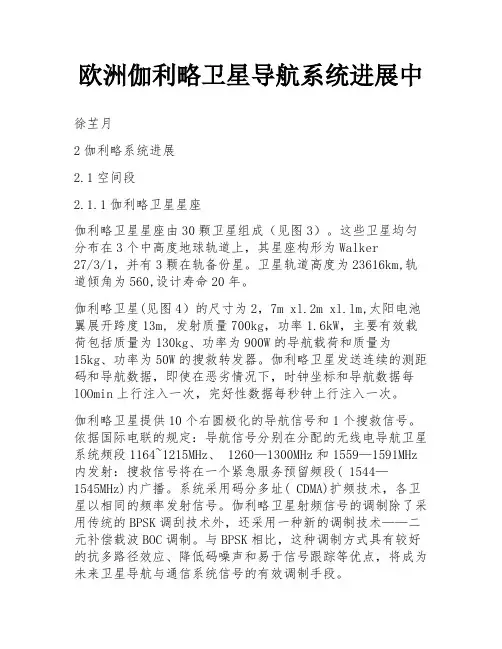
欧洲伽利略卫星导航系统进展中徐芏月2伽利略系统进展2.1空间段2.1.1伽利略卫星星座伽利略卫星星座由30颗卫星组成(见图3)。
这些卫星均匀分布在3个中高度地球轨道上,其星座构形为Walker27/3/1,并有3颗在轨备份星。
卫星轨道高度为23616km,轨道倾角为560,设计寿命20年。
伽利略卫星(见图4)的尺寸为2,7m xl.2m xl.lm,太阳电池翼展开跨度13m, 发射质量700kg,功率1.6kW,主要有效载荷包括质量为130kg、功率为900W的导航载荷和质量为15kg、功率为50W的搜救转发器。
伽利略卫星发送连续的测距码和导航数据,即使在恶劣情况下,时钟坐标和导航数据每lOOmin上行注入一次,完好性数据每秒钟上行注入一次。
伽利略卫星提供10个右圆极化的导航信号和1个搜救信号。
依据国际电联的规定:导航信号分别在分配的无线电导航卫星系统频段1164~1215MHz、 1260—1300MHz和1559—1591MHz 内发射:搜救信号将在一个紧急服务预留频段( 1544—1545MHz)内广播。
系统采用码分多址( CDMA)扩频技术,各卫星以相同的频率发射信号。
伽利略卫星射频信号的调制除了采用传统的BPSK调刮技术外,还采用一种新的调制技术——二元补偿载波BOC调制。
与BPSK相比,这种调制方式具有较好的抗多路径效应、降低码噪声和易于信号跟踪等优点,将成为未来卫星导航与通信系统信号的有效调制手段。
2.1.2伽利略卫星有效载荷(1)导航有效载荷导航有效载荷主要包括:①授时系统:②信号产生子系统,对载波频率进行格式化、编码和调制;③无线电频率子系统,放大调制载波;④天线子系统,向用户发送导航信号;⑤C频段数据接收系统,负责接收导航电文和完好性数据。
其中,授时系统由星载原子钟以及相对应的功分器、功率合成器、频率分配网络、二次电源模块和锁相环( PLL)电路等部件构成。
星载原子钟是卫星授时系统的核心,包括2台铷钟和2台氢脉泽钟。
2021届重庆市大足第一中学校高三语文期中考试试题及答案解析一、现代文阅读(36分)(一)现代文阅读I(9分)阅读下面的文字,完成下面小题。
材料一:知识付费主要指知识的接收者为所阅览知识付出资金的现象。
知识付费让知识的获得者间接向知识的传播者与筛选者给予报酬,而不是让参与知识传播链条的人通过流量或广告等其他方式获得收益。
从2016年开始,一系列标志性的事件让知识付费渐渐成为时尚。
2016年5月15日,付费语音问答平台——“分答”上线。
随后,罗辑思维创始人罗振宇全力打造“得到”APP,喜马拉雅FM创办知识付费节“123知识狂欢节”,知乎上线“知乎live”等等。
进入2017年,这一趋势丝毫没有减速的迹象。
3月7日,豆瓣网推出了首款付费产品——“豆瓣时间”;随后腾讯CEO马化腾表示,微信公众号正加快上线付费订阅。
2019年12月30日知识付费系统技术服务商“创客匠人”新三板挂牌上市。
(摘编自“百度百科”“知识付费<专有名词>”)材料二:在有关知识付费问题的争论中,人们始终有一个困惑,即知识付费平台提供的所谓“知识”,实际上通过其他免费方式也可以获得。
例如,中国知网提供的期刊学术论文,亦可在一般公共图书馆找到。
事实上,同样是内容平台,采用免费提供和自由获取知识的形式,是早期互联网平台的主流模式,如维基百科、百度百科以及各种各样的网络知识资源共享平台,这类知识自由获取平台,今天仍然有很大数量。
那么,为什么通过现在的这些平台获取同样的知识还需要付费?“知识付费”带来了一种更加便捷的知识获取新方式——“知识付费”平台按市场原则,既为各类知识发现需求者,也为需求者找到其所需要的知识,并且知识需求者愿意为此付费。
平台在向需求者收取服务费用时也与知识提供者分享收益。
“知识付费”实际上是数字技术、移动互联网通信技术以及其他信息技术在知识领域的应用。
凭借这些新技术,知识付费运营平台有着其他机构和体系不具备的独特优势,以个性化方式为需求者提供知识。
北斗卫星导航系统的应用前景及如何应对GPS挑战【摘要】北斗卫星导航系统是中国正在实施的自主研发、独立运行的全球卫星导航系统。
北斗卫星的工作流程是通过地面控制中心向卫星I和卫星II同时发送询问信号,经卫星转发器向服务区内的用户广播。
美国GPS导航系统由美国空军建立。
美国GPS系统定位性能分为不同等级,低精度、中精度和高精度动态定位。
北斗系统目前在科学、渔业、救灾、国防等诸多领域已经得到了广泛的应用,而且用户逐年增加,将为国家社会和经济建设作出了很大贡献。
【关键词】北斗卫星导航系统 GPS系统定位原理应用前景一、北斗卫星导航系统简介北斗卫星导航系统﹝BeiDou(COMPASS)Navigation Satellite System﹞是中国正在实施的自主研发、独立运行的全球卫星导航系统。
可在全球范围内全天候、全天时为各类用户提供高精度、高可靠的定位、导航、授时服务,并兼具短报文通信能力。
与美国GPS、俄罗斯“格洛纳斯”(GLONASS)、欧洲“伽利略”(GALILEO)并称全球四大卫星导航系统。
北斗卫星导航系统由空间端、地面端和用户端三部分组成。
空间端包括5颗静止轨道卫星和30颗非静止轨道卫星。
地面端包括主控站、注入站和监测站等若干个地面站。
用户端由北斗用户终端以及与美国GPS、俄罗斯“格洛纳斯”(GLONASS)、欧洲“伽利略”(GALILEO)等其他卫星导航系统兼容的终端组成。
随着信息技术在我国国民经济中广泛应用,导航定位(指示空间坐标)和授时(指示时间坐标)的功能将在信息系统中成为最基本的功能。
精密时间不仅是科学研究和工程技术诸方面的基本物理参量,更为重要的是它为一切动力学系统、时序过程的测量和定量研究提供了必不可少的时基坐标。
精密授时在通信、金融、电力、控制等工业领域,以及至关重要的国防领域有着广泛而重要的应用;精确定位在精密测绘、航空航海、制导领域乃至大众导航领域都具有具足轻重的地位。
因此,导航授时系统是最关键的国家基础设施之一。
GNSS技术在测绘中的优势与限制引言全球导航卫星系统(GNSS)是近年来在测绘领域蓬勃发展的一项关键技术。
通过利用卫星信号进行定位,GNSS技术在测绘中具有许多优势。
然而,与任何技术一样,它也有一些限制。
本文将探讨GNSS技术在测绘中的优势和限制,并展望其未来的发展。
一、GNSS技术的优势1. 全球覆盖范围GNSS技术利用多颗卫星发射信号,能够实现全球范围内的定位和测量。
无论是在城市还是农村、陆地还是海洋,只要有卫星信号接收,就能够进行测绘工作。
这大大扩展了测绘的应用范围,使得人们能够使用GNSS技术进行精确的位置定位。
2. 高度精度定位GNSS技术在测绘中的另一个显著优势是其高度精确的定位能力。
通过同时接收多颗卫星的信号,GNSS接收器能够利用多普勒效应和时间延迟进行高精度的定位计算。
这种定位能力在土地测量、地图绘制和基础设施建设等方面发挥重要作用。
3. 实时性由于GNSS技术可以实时接收卫星信号并进行位置计算,因此能够提供即时的定位和测量结果。
这对于应急响应、车辆导航和船舶航行等需要实时信息的任务至关重要。
通过GNSS技术,人们可以实时获得位置信息,而不必依赖传统的地面标志或定位方法。
4. 多功能性GNSS技术不仅适用于地球测量,还可应用于气象、海洋学、农业和环境等领域。
通过结合其他数据源,如气象站点或农田监测设备,可以获得更全面的信息。
这使得GNSS技术成为一个多功能的工具,广泛应用于各个行业。
二、GNSS技术的限制1. 天气影响GNSS技术对天气条件敏感,特别是在恶劣的气象条件下,如强烈的降雨或大雪覆盖的区域。
这会导致卫星信号的弱化或完全丧失,从而影响定位精度和可用性。
在这种情况下,需要借助其他辅助技术或传感器来提供可靠的测量结果。
2. 复杂环境限制在城市、山区或森林等复杂环境中,建筑物、高山或树木可能会阻碍卫星信号的到达接收器。
这种环境限制会导致定位精度的损失或信号的不稳定。
为了克服这一问题,需要使用增强型GNSS技术或采用差分GPS方法,以提高定位的可靠性。
伽利略系统三篇gps系统如今已经具有非常重要的地位,不仅仅是生活中,在军事上的地位也是非常高,而率先掌握这一技术的是美国,早在1964年,美国已经开始研究“子午仪”系统,并且成为行业的领军者。
继美国之后,前苏联、欧洲都开始陆续投入到生产研究之中,而我国的起步是比较晚的。
欧洲一直以来大投入的是伽利略系统,受到美国技术的影响,伽利略系统一直以来也处于世界前列,我国也曾使用该系统,并且缴纳了20亿的服务费。
随着该系统重要性的减少,我国科学家也已经开始资金投入精力以及时间展开研究,其中代表产品就是北斗系统,该系统已经非常的明朗,以及在明年年底将可以全面投入使用投入使用。
随着北斗系统的建成,我们对于伽利略系统的依赖已经被替代,而也就在此时,伽利略系统陷入全面瘫痪,主要原因更是让人意外以及无奈,据相关媒体报道,伽利略系统的瘫痪是因为公司管理以及组织架构的松散,无人愿意加班检修,导致设备故障连绵不断。
如今,我国已经在多个技术上已经开始发力,gps系统现阶段虽然无法打破美国,但是必然也可以沦为主流系统,我国科技也可以迈向更离。
在2022年7月11日以来的约一周时间内,欧洲“伽利略”(galileo)全球卫星导航系统经历了从服务降级到服务全面中断,再到服务恢复的过程。
这是迄今为此,全球卫星导航领域发生的最重大的事件之一,引起了各方的密切关注,此次事件对全球卫星导航领域的未来发展产生重要影响。
01故障发生与发展过程“伽利略”全球卫星导航系统由欧洲单一制发展,项目于1998年明确提出并全面启动论证活动。
2022年12月,“伽利略”系统资金投入起始运转,提供更多起始定位、导航系统与授时(pnt)服务,提供更多pnt服务的卫星数量为11颗。
自“伽利略”系统投入初始运行以来,随着发射、部署卫星数量的增加,提供pnt服务的卫星数量也在不断增加,系统运行与服务保持连续、稳定。
至2022年5月,提供pnt 服务的卫星数量增加至22颗,服务覆盖、服务性能等得到明显提升。
北斗与伽利略的爱恨情仇一!2014-05-30【新战友】请点击文章标题下方的蓝色字体【砺剑】,快速关注。
【老战友】请点击右上角按钮,分享到朋友圈。
对于GPS,有一个公认的说法:它的价值是在海湾战争之后才为世人所知的。
在海湾战争期间,GPS就是一个媲美金闪闪的存在,闪瞎了包括其主人美国在内的所有人的眼。
在此之前,GPS在美国家里还处于有人当宝有人当草的尴尬位置,而在这之后,GPS俨然成为了美国的传家宝。
与此同时,平时和美国走得很近的一群欧洲小朋友开始了长达十年的羡慕嫉妒恨。
终于,2002年,历史性的时刻来临,15个国家携手开始打造别名“GPS 去死去死”的伽利略卫星导航系统。
对于伽利略的论证方案,全世界专家的共同评论只有两个字:完美。
但是,GPS在卫星导航市场上已经当了20年的老大,想抢它的地盘绝对不是一两句话就能搞定的。
此外,建造一个全球卫星导航系统所要花费的资金是个天文数字。
虽然各国都下定决心造出伽利略,可在提到钱的时候都有点蛋疼菊紧。
盟国一:“怎么办?压岁钱都让粑粑麻麻没收了哎。
”盟国二:“这可是我省下来买冰棍的钱喔,只有这些了。
那个谁是富二代的,你的零花钱一定很多吧?”盟国三:“你才富二代,你全家都是富二代!”……经过一系列的推诿争执后,欧盟达成一个重要共识:要跟GPS叫板,必须找一个有钱有市场的外援。
那么,放眼全球,谁家钞票很多市场又很大呢?远在千里之外的中国打了个响亮的喷嚏这时的中国在做神马?中国同样被GPS刺激到了,开始埋头造北斗,但造着造着,它发现有几个关于原子钟的问题不明白。
原子钟是导航卫星的心脏,原子钟造不出来,北斗就成为永远的传说了。
中国一筹莫展,正在这时,它收到了一封热情洋溢的来信,内容如下:亲,来和我们一起造“GPS去死去死”——哦,不对,是伽利略导航系统吧。
技术上我们出力你旁观,资金上我们出大头你只要出小头就可以了哟。
中国心花怒放,对于此时的它来说,能用钱解决掉的困难还能叫困难吗?这真是:山穷水尽疑无路,柳暗花明又一村。
北斗卫星导航系统的现状与前景木风恒仔【摘要】我国自行研制的“北斗卫星导航定位系统”(简称“北斗系统”)从正式运营、全面对民用用户开放至今,整个系统运行稳定,工作状态良好,已在测绘、电信、水利、交通运输、勘探和国家安全等诸多领域开始逐步发挥重要作用。
北斗系统作为一种新的卫星导航定位系统,有明显的技术优势,但也有一定的应用缺陷和不足。
该系统在推广应用过程中受到了许多因素的制约,在很多领域中的用途还未被认知。
目前,北斗系统的应用水平与国外卫星导航定位系统(如GPS 系统)相比,还明显处于劣势;在民用方面,还远远未达到产业化、市场化的水平,这与该系统作为世界上第三个投入实际应用服务的卫星导航定位系统的地位不相称。
须采取有力措施,推进北斗系统应用,使北斗系统更好地为我国的国防和国民经济建设服务,改变国外的卫星导航定位系统独占我国卫星定位导航应用市场的局面。
本文分析了北斗卫星导航定位系统的应用特点和应用现状,指出了制约该系统应用发展的主要因素,并将北斗与其他三大导航系统做了对比。
一、北斗系统简介北斗卫星导航系统(BeiDou(COMPASS)Navigation Satellite Syste)是中国正在实施的自主研发、独立运行的全球卫星导航系统。
第一代北斗导航系统已于2003年建成并开通运行,目前在建设的是第二代北斗导航系统。
第二代系统建设目标是:建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统,促进卫星导航产业链形成,形成完善的国家卫星导航应用产业支撑、推广和保障体系,推动卫星导航在国民经济社会各行业的广泛应用。
北斗卫星导航系统由空间段、地面段和用户段三部分组成,空间段包括5颗静止轨道卫星和30颗非静止轨道卫星,地面段包括主控站、注入站和监测站等若干个地面站,用户段包括北斗用户终端以及与其他卫星导航系统兼容的终端。
不同于GPS,北斗的指挥机和终端之间可以双向交流。
在2008年5月12日四川大地震发生后,北京武警指挥中心和四川武警部队运用“北斗”进行了上百次交流,通过北斗导航系统独有的报文功能发送了50多万条的短信,使外界在地震灾区各项通信中断的情况下了解到灾区的具体信息,为抗震救灾带来了巨大的便利。
简单对比全球四大卫星导航系统2011年12月27日,对于中国的高精度测绘定位领域来说是一个不平凡的日子,中国北斗卫星导航系统(CNSS) 正式向中国及周边地区提供连续的导航定位和授时服务,这是世界上第三个投入运行的卫星导航系统。
在此之前,美国的全球定位系统(GPS)和俄罗斯的格洛纳斯卫星导航系统(GLONASS)早在上世纪90年代就己经建成并投入运行。
与此同时,欧盟也在打造自己的卫星导航系统一一“伽利略”计划。
那么,这四大卫星导航系统之间到底有着怎么样的区别和联系呢?下面,就让我们来逐个分析一下,通过四大卫星导航系统的优劣分析,给大家一个较为明显的概念。
四大卫星导航系统各有优势,详情如下:GPS:成熟GPS,作为大家最为熟悉的定位导航系统,她最大的特点就是技术方面最为成熟。
美国“全球定位系统”(GPS),是目前世界上应用最广泛、也是技术最成熟的导航定位系统。
GPS空间部分目前共有30颗、4种型号的导航卫星。
1994年3月,由24颗卫星组成的导航“星座”部署完毕,标志着GPS正式建成。
中国北斗:互动开放北斗卫星导航系统是中国正在实施的自主发展、独立运行的全球卫星导航系统。
系统建设目标是:建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统。
北斗卫星导航系统由空间段、地面段和用户段三部分组成。
目前市面上定位导航仪器公司如国外的天宝、拓普康, 国内的华测导航等都己支持北斗卫星导航定位系统。
欧盟伽利略:精准伽利略定位系统是欧盟一个正在建造中的卫星定位系统,有“欧洲版GPS”之称。
伽利略定位系统总共发射30 颗卫星,其中27颗卫星为工作卫星,3颗为候补卫星。
该系统除了30颗中高度圆轨道卫星外,还有2个地面控制中心。
俄罗斯格洛纳斯:抗干扰能力强早在美苏冷战时期,美国和苏联就各项技术特别是空间技术方面争锋相对,在美国GPS技术遍布全国的同时,苏联也没闲着,一直忙于研发自己的全球导航定位系统。
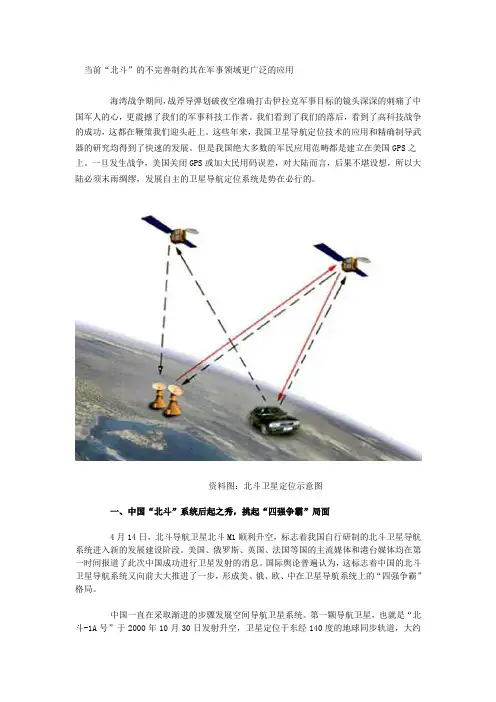
当前“北斗”的不完善制约其在军事领域更广泛的应用海湾战争期间,战斧导弹划破夜空准确打击伊拉克军事目标的镜头深深的刺痛了中国军人的心,更震撼了我们的军事科技工作者。
我们看到了我们的落后,看到了高科技战争的成功,这都在鞭策我们迎头赶上。
这些年来,我国卫星导航定位技术的应用和精确制导武器的研究均得到了快速的发展。
但是我国绝大多数的军民应用范畴都是建立在美国GPS之上。
一旦发生战争,美国关闭GPS或加大民用码误差,对大陆而言,后果不堪设想,所以大陆必须末雨绸缪,发展自主的卫星导航定位系统是势在必行的。
资料图:北斗卫星定位示意图一、中国“北斗”系统后起之秀,挑起“四强争霸”局面4月14日,北斗导航卫星北斗M1顺利升空,标志着我国自行研制的北斗卫星导航系统进入新的发展建设阶段。
美国、俄罗斯、英国、法国等国的主流媒体和港台媒体均在第一时间报道了此次中国成功进行卫星发射的消息。
国际舆论普遍认为,这标志着中国的北斗卫星导航系统又向前大大推进了一步,形成美、俄、欧、中在卫星导航系统上的“四强争霸”格局。
中国一直在采取渐进的步骤发展空间导航卫星系统。
第一颗导航卫星,也就是“北斗-1A 号”于2000年10月30日发射升空,卫星定位于东经140度的地球同步轨道,大约在新几内亚岛上空,这也是处于整个星座最东面的一颗工作星。
两个月后的12月20日,中国又发射了第二颗地球同步导航卫星“北斗-1B号”。
在近两年半的时间里,它们是中国仅有的导航卫星,直到第三颗卫星的发射升空。
“北斗-1C号”属于导航定位系统的备份卫星;处于前两颗工作星的中间,与前两颗一起组成了中国自己完整的卫星导航定位系统。
北斗导航试验系统运行至今工作稳定、状态良好,已在测绘、电信、水利、交通运输、勘探和国家安全等诸多领域逐步发挥重要作用。
对于这第四颗“北斗”卫星的上天,许多人猜测的是,这将是我国北斗系统进行第二代的标志,因为“北斗”是双星系统,两颗星就足够一个区域的运作了,第三颗星则是备份星。

欧洲伽利略卫星导航系统进展上徐菁2011年10月,欧洲将在法属圭亚那用联盟号火箭首次发射正式运行的伽利略卫星,伽利略卫星导航系统进入全面部署阶段。
全球卫星导航系统(GNSS)是一种天基无线电导航定位与时间传递系统.包括卫星星座、地面系统及用户终端设备等三大部分,可为地球表面和近地空间的广大用户提供全天候、全天时、高精度的三维位置、速度和时间信息。
伽利略卫星导航系统是欧洲正在实施的一项重大民用航天项目,于20世纪90年代由欧盟委员会和欧空局共同发起,其目标是建成欧洲自主的民用全球卫星导航系统,并与美国GPS和俄罗斯CLONASS导航系统相兼容,从而摆脱对GPS系统的依赖.打破美国对全球卫星导航定位产业的垄断。
在使欧洲获得工业和商业效益的同时,它将为建立欧洲共同安全防务体系提供基础条件。
1伽利略计划概况利用“国际移动卫星”3发展的“欧洲地球静止卫星导航重叠服务” (EGNOS),能够为欧洲用户提供辅助测距、GPS和GLONASS系统广域差分信息以及完好性信息服务。
EGNOS设计服务期限为15年,已在2004年进入试运行阶段并初步提供商业应用。
但是,自20世纪90年代以来,卫星导航技术的应用已经遍及陆地、海洋、航空和航天等各类军事和民用领域,卫星导航已初步形成一个跨学科、跨行业的综合性、国际性高新基础产业。
欧洲各国从政治、军事、经济和技术等方面的发展战略考虑.必须拥有自己独立的卫星导航系统。
经过多次商讨,1999年2月10日,欧盟在《伽利略——欧洲参与新一代卫星导航服务》的报告中,首次提出比较可行的欧洲全球卫星导航定位系统计划——伽利略计划。
2002年3月26日.在布鲁塞尔召开的欧盟交通部长会议上,表决通过为该项目划拨4.5亿欧元研究经费.标志着伽利略计划正式启动。
伽利略计划在研发阶段由欧盟委员会和欧空局共同负责,欧盟委员会负责政治领域和高层次的任务需求,包括对系统总体结构、经济收益和用户需求的研究。
伽利略与北斗竞争难停息欧洲仍占多项优势图
“北斗”卫星一年内连射五颗,已成功抢占与伽利略争夺的“次优频率”。(资料图)
2010年,欧洲的伽利略计划在压力下向前推进。伽利略初始运行能力(IOC)6个采购合
同成功授出4个,多个伽利略系统的地面站和控制中心陆续竣工,被屡次推迟并一再追加投
资的伽利略卫星导航系统向2014年完成初步部署并具备初始运行能力迈出了重要一步。
伽利略计划在不断推进
2010年,经过多方协调,欧盟委员会最终授出6个伽利略初始运行能力(IOC)采购合同
中的4份。这些合同的授出意味着伽利略计划全面启动了建造“伽利略”运行基础设施的工
作。
伽利略计划基础设施建设阶段总耗资约34亿欧元,如何分配这个大“蛋糕”曾是欧盟的一
个难题,各国也都为了本国的公司能够多分一杯羹而争吵不断。因此,欧盟委员会不得不将
整个项目拆成小的分包合同,并且制定了详细的项目合同分配方案,确保项目竞争过程中的
公平性。即便如此,面对价值高达上亿欧元的合同,竞争依然十分激烈。
目前来看获益最大的仍是航天技术领先的德意法英等国。其中,意大利泰利斯阿莱尼亚太
空公司获得了系统支持服务项目合同,价值8500万欧元;德国OHB公司领衔囊获卫星项
目合同(建造前14颗卫星),合同总额5.66亿欧元;法国阿里安太空公司赢得了卫星发射
服务项目合同,合同价值3.97亿欧元;运行阶段的空间和地面设施管理项目合同则授予由
德国航空航天中心和意大利空间通信公司联合建立的Spaceopal公司,合同金额约1.94亿欧
元。剩下的地面基础设施完成项目和地面控制中心完成项目两个合同预计将于2011年签署。
另外,2010年,多个伽利略卫星导航系统的地面站和控制中心陆续建成。包括2010年10
月6日建成的伽利略卫星导航系统全球服务网络最远的站点之一,位于南太平洋中的新喀里
多尼亚(New Caledonia,法国的海外领地)监测站;2010年12月13日正式落成的伽利略卫
星导航系统,位于瑞典北部基律纳市的地面站;以及2010年12月20日投入使用的伽利略
卫星导航系统,位于意大利富奇诺的控制中心等。
加之此前已经建成的地面站点,如2009年11月19日落成的位于法属圭亚那库鲁航天中
心的库鲁地面站等,伽利略导航系统地面配套设施的建设已经取得阶段性成果。虽然原定
2010年底发射的伽利略在轨验证(IOV)卫星因研发进程滞后而延期,但2011年完工并发
射似乎没有太大问题。自2008年4月基础设施建设阶段正式启动以来,伽利略计划虽然不
像想象中的顺利,但却一直在不断向前推进,2014年完成初步部署并具备初始运行能力已
经不再遥不可及
“伽利略”作为反制美国GPS垄断的产物,自诞生之初就历经挫折。图为“伽利略”卫星星
座想象图。(资料图)
伽利略计划面临资金压力
2010年,推进中的伽利略计划暴露出了其面临的沉重资金压力。由于原计划2008年投入
使用的伽利略系统延期至2018年,伽利略计划不仅投资预算在不断增加,其收益期望也日
益减少,甚至可能将面临长期亏损的局面。对此,将承担其中约20%预算的德国已经明确
表示了不满,要求欧盟削减伽利略系统的实施成本。
2010年5月12日,德国联邦交通部国会秘书安德烈亚斯·朔伊尔博士在国内接受质询时表
示,欧盟委员会对伽利略计划的投入做了重新估算,结论是卫星导航系统的研发阶段费用将
从原先的11亿欧元上升到18亿欧元,部署阶段(布满30颗星)也将从原先计划的15亿至
18亿欧元上升至34亿欧元,这远远超出了计划。增加的费用主要来自火箭发射费、安全保
险费的提高,以及延期的费用等。
不仅如此,伽利略计划先期的财务统计还显示,该工程长期以来入不敷出。伽利略计划可
能面临长期亏损,在未来20年里需要的补贴可能高达150亿欧元。伽利略计划未来平均每
年的费用将达到7.5亿欧元,而现在的预算是每年只投入2.5亿欧元。而究其原因,主要是
系统的不断扩建,以及未来的商业收入可能会明显减少。目前来看,伽利略卫星导航系统的
商业用途可能不会像最初设想的那样大,它与最大客户美国GPS全球定位系统的合作是免
费的,并且还将面临来自俄罗斯的GLONASS竞争。
因此,作为伽利略计划主要的出资者之一,德国政府于2010年10月24日明确要求欧盟
委员会提出可行性方案,以削减伽利略全球卫星导航系统的实施成本。德国政府希望欧盟能
将伽利略计划的成本削减5亿到7亿欧元,并希望在发射伽利略导航卫星时,弃用欧洲阿丽
亚娜-5型火箭,改用成本更低的俄罗斯“联盟”火箭。
与“伽利略”相比,北斗卫星在技术水平方面仍有差距。图为“北斗二号”导航卫星工作示意
图。(资料图)
伽利略计划的挑战和机遇
虽然面临投资增加以及多次延期的压力,伽利略计划作为欧洲独立于美国的重要一步,仍
然得到了欧洲各国的支持。欧盟委员会副主席塔亚尼曾表示,无论从经济还是安全角度来说,
伽利略卫星导航系统对欧洲十分重要,它将确保欧洲的“政治独立”。因此,虽然工程拖延和
系统扩建导致建设费用增加,但对于欧盟深远的政治考虑而言,这点代价并不算高。
为了降低风险并增加灵活性,欧盟委员会已经采取了双源策略,规定任何一家公司不能成
为超过两类合同的主承包商,而每种产品都必须有两家不同的供应商等。例如OHB公司虽
然是建造前14颗卫星的主承包商,但其还必须应对来自EADS公司的竞争,因为后续合同
授予OHB公司还是EADS公司将取决于谁能提供最有利的报价。这些措施都将为控制伽利
略计划的预算起到很好的作用,同时,也扩大了高科技战略的辐射作用。
在技术方面,当2005年12月28日伽利略计划首颗实验卫星“GIOVE-A”被顺利送入太
空轨道时,该系统在兼容性和精确度等设计方面都优于当时美国的GPS全球卫星定位系统。
只是其后伽利略计划被一再延期,原本领先的技术优势才被更新换代的GPS等超越。不过
就总体的自主技术水平而言,在大规模微芯片制造、星载铷原子钟(RAFS)以及遍布全球的
监测站等方面,伽利略系统与GLONASS和北斗系统相比仍有一定优势。
至于曾一度沸沸扬扬的伽利略和北斗的频率之争,本应随着北斗系统在2010年连发5颗
卫星,在事实上首先使用该频率而暂时告一段落。不过记者在联邦经济技术部举行的“德国
航天战略”相关研讨会上了解到,来自北斗系统的竞争仍多次被提及,显然二者的竞争并没
有完全结束。与此相关,塔亚尼甚至在今年夏天表示,会从技术角度考虑将原定发射的30
颗卫星减少为18颗的情况。
不过与北斗相比,伽利略系统在未来应用市场领域仍占据很大的优势。这一方面得益于伽
利略系统从设计之初就定位于民用服务,一直以来大力推动伽利略系统的拓展服务研究与应
用;另一方面也和参加伽利略计划的国家和地区众多有关。而换个角度看,或许作为两个第
二梯队的“运动员”,伽利略和北斗真正的对手并不是彼此,而是早已成功运行多年的GPS
和GLONASS,因此携手合作共同进步才是解决问题的最好办法。(驻德国记者 李山)
中国曾投巨资加入欧洲“伽利略”计划,但在合作过程中未能获得平等地位。(资料图
中国的北斗导航系统和美国GPS、俄罗斯格罗纳斯、欧盟伽利略系统并称为全球四大卫
星导航系统。目前,联合国已将这4个系统一起确认为全球卫星导航系统核心供应商。图为
北斗卫星工作示意图。(资料图)
欧洲的“伽利略”导航卫星(资料图
欧洲方面由于经费不足,“伽利略”的研制进度受到拖延,发射工作也尽量交给费用较低廉
的俄罗斯火箭。图为发射“伽利略”卫星的俄罗斯“联盟FG”火箭。(资料图)
目前,全球导航卫星市场基本被美俄卫星所垄断。图为俄罗斯的“格洛纳斯”导航卫星。(资
料图)
美国的第二代GPS卫星导航系统(资料图)
伽利略卫星发射模拟图(资料图)
“伽利略”卫星模拟图(资料图)